Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано в обзорных и секторных радиолокационных станциях (РЛС) для решения задач обнаружения маневрирующих малоразмерных воздушных объектов (целей) в условиях низких значений отношения сигнал-шум.
Уровень техники
Известен способ обнаружения траектории маневрирующего объекта, заключающийся в том, что зондируют пространство пачками когерентных радиоимпульсов, осуществляют аналого-цифровое преобразование отраженного от маневрирующего объекта комплексного сигнала, представленного синфазной (действительной) и квадратурной (мнимой) составляющими, получают выборки сигналов, осуществляют дискретное преобразование Фурье, определяют модули полученных значений, вычисляют смешанную апостериорную плотность распределения вероятностей в множестве точек, определяемых амплитудой, дальностью, скоростью, ускорением, вычисляют отношение количества точек, в которых объект существует в момент вычислений и на предыдущем шаге, к общему количеству точек, сравнивают полученное отношение с порогом, на основании сравнения принимают решение об обнаружении или необнаружении траектории объекта, отличающийся тем, что дискретное преобразование Фурье осуществляют для множества каналов по ускорению, в каждом из которых перед вычислением дискретного преобразования Фурье осуществляют фазовый сдвиг, для компенсации межпериодного фазового набега за счет ускорения, в соответствии с фазовыми сдвигами формируют оценки ускорения, являющиеся координатами точек для вычисления смешанной апостериорной плотности распределения вероятностей [1]. В рассмотренном способе решена задача обнаружения траектории, описываемой полиномом 2-го порядка, не учитывается рывок цели на интервале наблюдения. Для реализации указанного способа надо иметь многоканальное устройство. Кроме того, расчет апостериорной плотности распределения вероятностей на каждом шаге значительно увеличивает вычислительные затраты.
Известен способ радиолокационного обнаружения траектории цели, предусматривающий регулярный обзор пространства путем радиолокационного зондирования каждого углового направления, последующий прием эхо-сигнала, его обработку и принятие решения об обнаружении траектории цели по результатам нескольких обзоров, отличающийся тем, что решение об обнаружении траектории цели принимают по критерию превышения порога подтверждения гипотезы значением достаточной статистики, которое рассчитывают как сумму квадратов максимальных значений сигнала из локальной области первого обзор и из К-1 стробов из последующих обзоров, положения стробов для последующих обзоров формируют на основе положений максимальных значений сигнала в стробах предыдущих обзоров, в случае обнаружения траектории цели, точками траектории выбирают координаты элементов разрешения, отобранные за К обзоров по критерию максимальных амплитуд сигналов [2]. Недостатком рассмотренного способа является необходимость расчета достаточной статистики, сравнении ее с порогом для каждого элемента разрешения и выборе размера строба от обзора к обзору. При этом в способе не учитывается изменение параметров модели движения цели, что может привести к обнаружению ложных и пропуску истинных траекторий.
Наиболее близкий способ обнаружения цели, включающий согласованную фильтрацию принимаемого сигнала с последующим выделением огибающей сигнала и сравнением ее в каждой дискрете по дальности с порогом обнаружения, согласно изобретению, вводится дополнительный канал обработки радиолокационной информации, включающий процесс сравнения сигнала с порогом обнаружения первого этапа обнаружения, который меньше порогового уровня канала прототипа, аналого-цифровое преобразование всех пройденных сигналов, их межобзорное накопление, преобразование и хранение результатов в накопителе Хафа, дальнейшее сравнение результатов преобразования с пороговым устройством второго этапа обнаружения, по результатам которого формируются трассы всех целей сигналы которых прошли порог первого этапа обнаружения дополнительного канала, что одновременно является фактом обнаружения цели [3]. Отсутствие возможности обнаружения маневрирующих воздушных объектов и наличие в устройстве дополнительного канала является недостатком указанного способа.
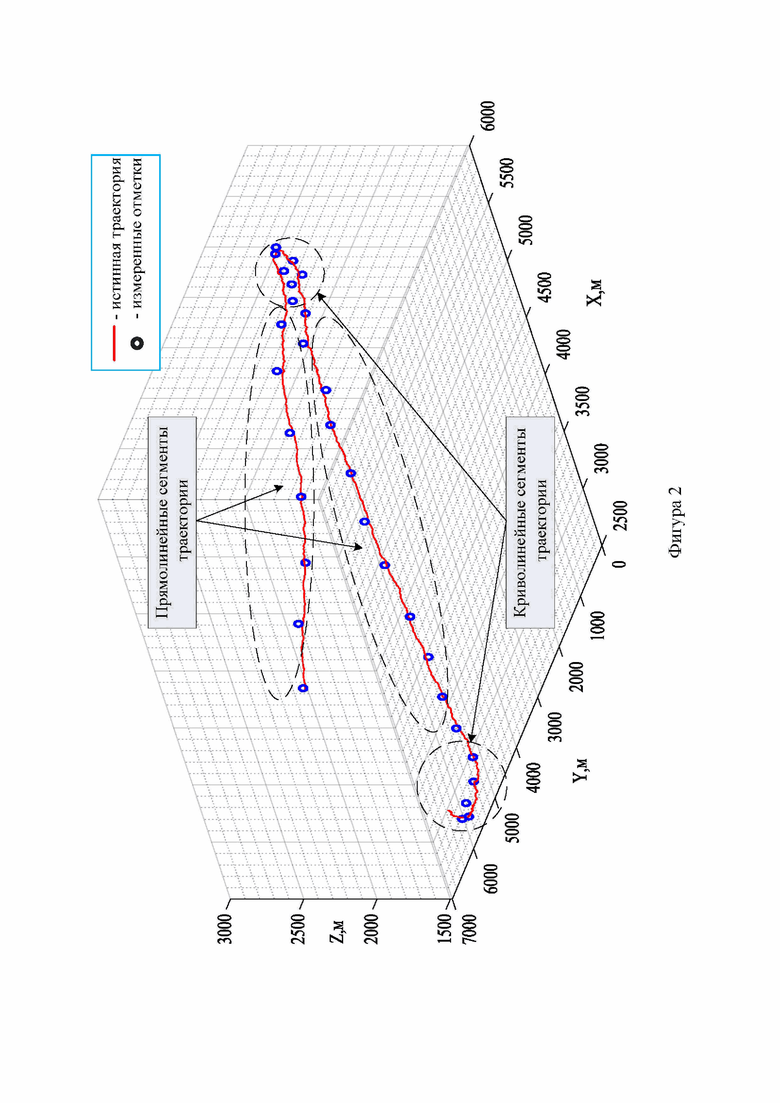
Наиболее близкое устройство [4] содержит последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3, оперативное запоминающее устройство 4, входы которого являются выходами пороговых устройств от каждого канала, вычислительное устройство 5, выход которого является входом блока стробирования отметок 6, 1 и 2 выходы которого является входом каналов обработки отметок блока завязки прямолинейных траекторий, каждый из которых решает задачу выделения траектории на плоскости, и состоит из последовательно соединенных блока реализации алгоритма Хафа, включающий в себя вычислительное устройство 7, дискретизатор 8 и счетчик 9, блока выделения ячеек из кластера 10, блока селекции отметок по скорости 11, выход которого подключен к входу блока объединения траекторий 12, выход которого подключен ко входу порогового устройства 13, дополнительно введен блок завязки криволинейных траекторий входом которого является 3 выход блока стробирования отметок 6, состоящий из последовательно соединенных блока реализации алгоритма Радона, включающего в себя вычислительное устройство 14, дискретизатор 15, счетчик 16, блока выделения ячеек из кластера 17, блока селекции отметок 18, порогового устройства 19, выход блоков завязки прямолинейных траекторий и блока завязки криволинейных траекторий является входом блока сглаживания траекторий 20, выход которого является выходом всего устройства. Данное устройство обеспечивает решение задач обнаружения маневрирующих траекторий целей в разнесенных радиолокационных системах, где время накопления отметок ограничено нахождением целей в пределах радиолокационного барьера. В устройстве априорно задано, что за время накопления, цели могут двигаться прямолинейно или по дуге эллипса (окружности). Таким образом, представленное устройство нельзя использовать для обнаружения малоразмерных маневрирующих целей в обзорных РЛС, по причине того, что за время накопления цели могут двигаться по сложным траекториям, состоящих из нескольких сегментов прямых и дуг эллипса (окружности).
Раскрытие изобретения
Решаемой задачей (техническим результатом) является увеличение дальности обнаружения маневрирующих малоразмерных воздушных объектов и повышение вероятности обнаружения истинных траекторий в условиях низких значений отношения сигнал-шум.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения целей, включающем согласованную фильтрацию принимаемых сигналов от целей с последующим выделением их огибающих, аналого-цифровое преобразование, сравнение в каждом элементе разрешения с порогом обнаружения и их межобзорное накопление, согласно изобретению, вводится два канала обработки радиолокационной информации в отличии от прототипа, где для накопленной выборки отметок осуществляются параметрические преобразования Хафа и Радона, дальнейшее сравнение результатов преобразований в пороговом устройстве второго этапа обнаружения, по результатам которого восстанавливаются сегменты траекторий и далее объединяются (отождествляются) по пространственно-временным параметрам, после чего осуществляется выбор наиболее вероятных (истинных) траекторий путем сравнения с третьим порогом обнаружения и одновременно принимается решение об обнаружении целей.
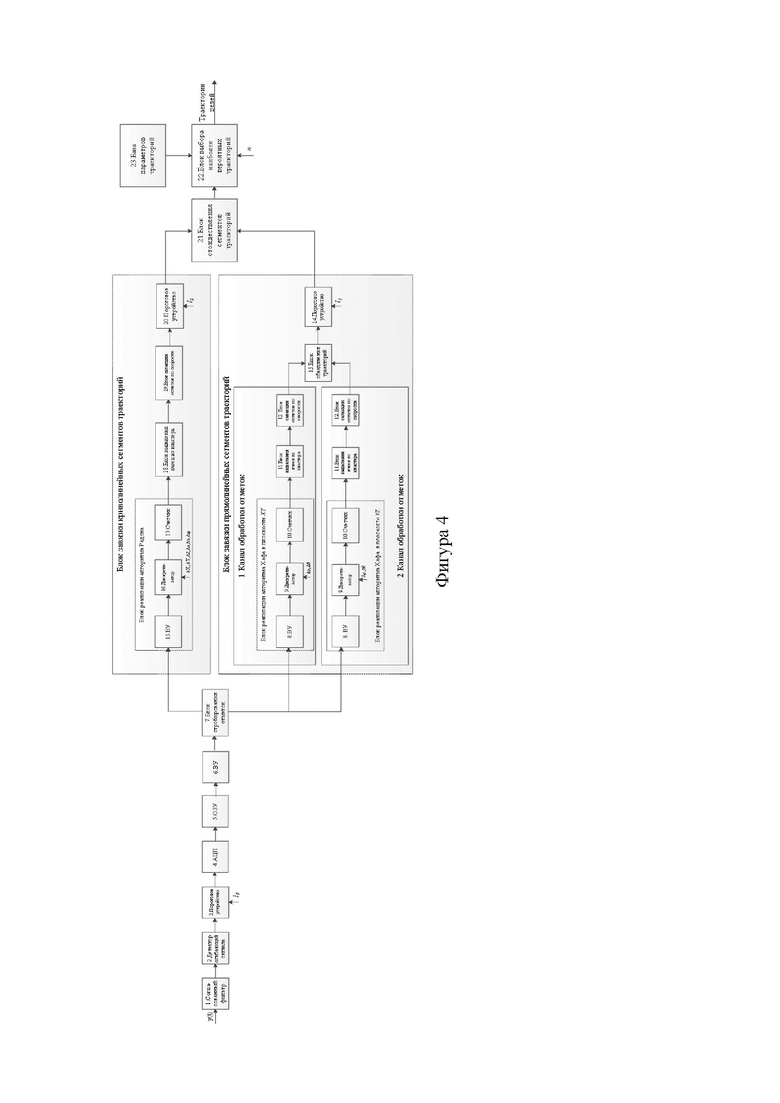
Указанный результат достигается также тем, что в устройстве радиолокационного обнаружения целей, содержащем последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3, блок АЦП 4, оперативное запоминающее устройство 5, вычислительное устройство 6, блок стробирования отметок 7 выходы 1 и 2 которого, согласно изобретению, являются входами каналов обработки отметок блока завязки прямолинейных сегментов траекторий, каждый из которых решает задачу выделения траектории на плоскости, и состоит из последовательно соединенных блока реализации алгоритма Хафа, включающий в себя вычислительное устройство 8, дискретизатор 9 и счетчик 10, блока выделения ячеек из кластера 11, блока селекции отметок по скорости 12, выход которого подключен к входу блока объединения траекторий 13, выход которого подключен ко входу порогового устройства 14, блок завязки криволинейных траекторий входом которого является 3 выход блока стробирования отметок 7, состоящий из последовательно соединенных блока реализации алгоритма Радона, включающего в себя вычислительное устройство 15, дискретизатор 16, счетчик 17, блока выделения ячеек из кластера 18, блока селекции отметок 19, порогового устройства 20, выход блоков завязки прямолинейных и криволинейных сегментов траекторий является входом дополнительно введенного блока отождествления сегментов траекторий 21, выход которого является входом блока выбора истинных траекторий 22 и вход которого соединен с блоком хранения параметров траекторий 23, выход блока 22 является выходом всего устройства.
Сущность предложенного способа заключается в следующем.
РЛС осуществляет обзор пространства с установленным порогом, обеспечивающим обнаружение слабых эхо-сигналов от маневрирующих малоразмерных воздушных объектов [5]. Сигналы от целей и помеховые сигналы, превысившие порог обнаружения, в виде отметок, соответствующих координатам дальности, азимута и угла места запоминаются в приемном устройстве РЛС в массив данных.
Полученный массив данных подвергается известным параметрическим преобразованиям Хафа и Радона [6-8], которые позволяют выявлять характерные сегменты прямых, полученных в ходе накопления многообзорной информации от движущихся прямолинейно воздушных объектов, и кривых, полученных в ходе накопления многообзорной информации от маневрирующих воздушных объектов.
Обнаружение происходит на основании априорной модели движения воздушных объектов. Отметки прямолинейно движущихся воздушных объектов, полученные в нескольких периодах обзора, будут выстраиваться в практически прямую линию последовательно друг за другом от обзора к обзору на относительно равных расстояниях. Отметки от маневрирующих воздушных объектов, полученные в нескольких периодах обзора, будут выстраиваться в кривую линию (дугу эллипса) последовательно друг за другом от обзора к обзору на относительно равных расстояниях. Ложные отметки помех могут появляются случайно в разных элементах разрешения [9] (фиг. 1).
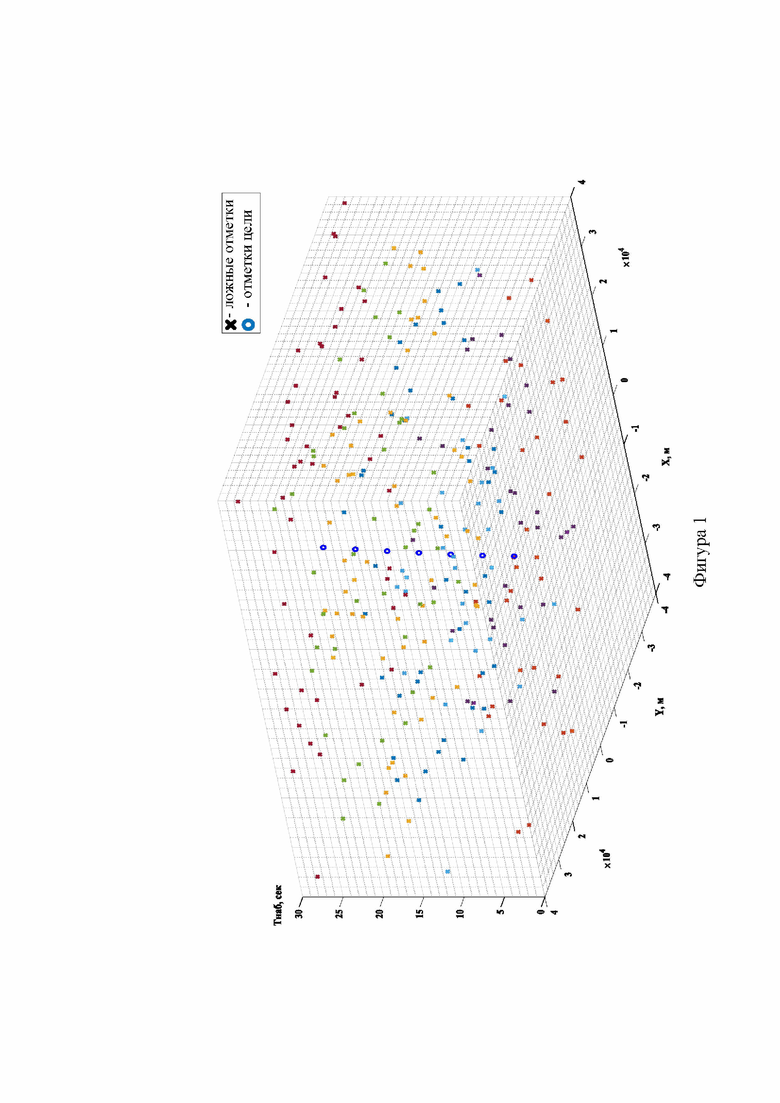
После применения параметрических преобразований получаются группы отметок, принадлежащих прямолинейным и (или) криволинейным сегментам траекторий (фиг. 2). Далее количество отметок в группе, сравнивается с порогом по заданному критерию обнаружения сегментов траектории «m из 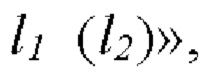 где
где  - порог обнаружения прямолинейных сегментов траектории,
- порог обнаружения прямолинейных сегментов траектории,  - порог обнаружения криволинейных сегментов траектории, и на этом основании принимается решение об обнаружении или необнаружении сегментов траектории цели.
- порог обнаружения криволинейных сегментов траектории, и на этом основании принимается решение об обнаружении или необнаружении сегментов траектории цели.
После обнаружения сегментов траекторий решается задача отождествления сегментов для обнаружения результирующей (истинной) траектории. Для правильного отождествления и объединения сегментов траектории определяются схожие отметки и исключаются из одного сегмента траектории. Параметрами объединения являются значения параметров движения цели на конечном (начальном) сегменте и время обнаружения первой (последней) отметки сегмента траектории.
Результатом объединения могут быть ложные траектории. Для их исключения происходит сравнение параметров завязанных траекторий с параметрами, соответствующим истинным траекториям, и выбор наиболее вероятных (истинных) из всех завязанных. Это позволяет решить задачу обнаружения истинных траекторий и в последующем задачу обнаружения целей.
Основанный на параметрическом преобразовании способ обнаружения траекторий маневрирующих воздушных объектов обладает высокой устойчивостью к большому количеству ложных отметок и пропуску истинных отметок, что позволяет решать задачу обнаружения траекторий маневрирующих воздушных объектов с высокой эффективностью в условиях низких значений отношения сигнал-шум.
Таким образом, снижение первичного порога обнаружения эхо-сигналов, накопление отметок сигналов, превысивших порог, дальнейшая обработка с использованием параметрических преобразований Хафа и Радона позволяет повысить дальность обнаружения и вероятность обнаружения маневрирующих малоразмерных воздушных объектов.
Изобретения иллюстрируются следующими чертежами:
Фиг. 3-наиболее близкое устройство радиолокационного обнаружения целей, реализующее наиболее близкий способ.
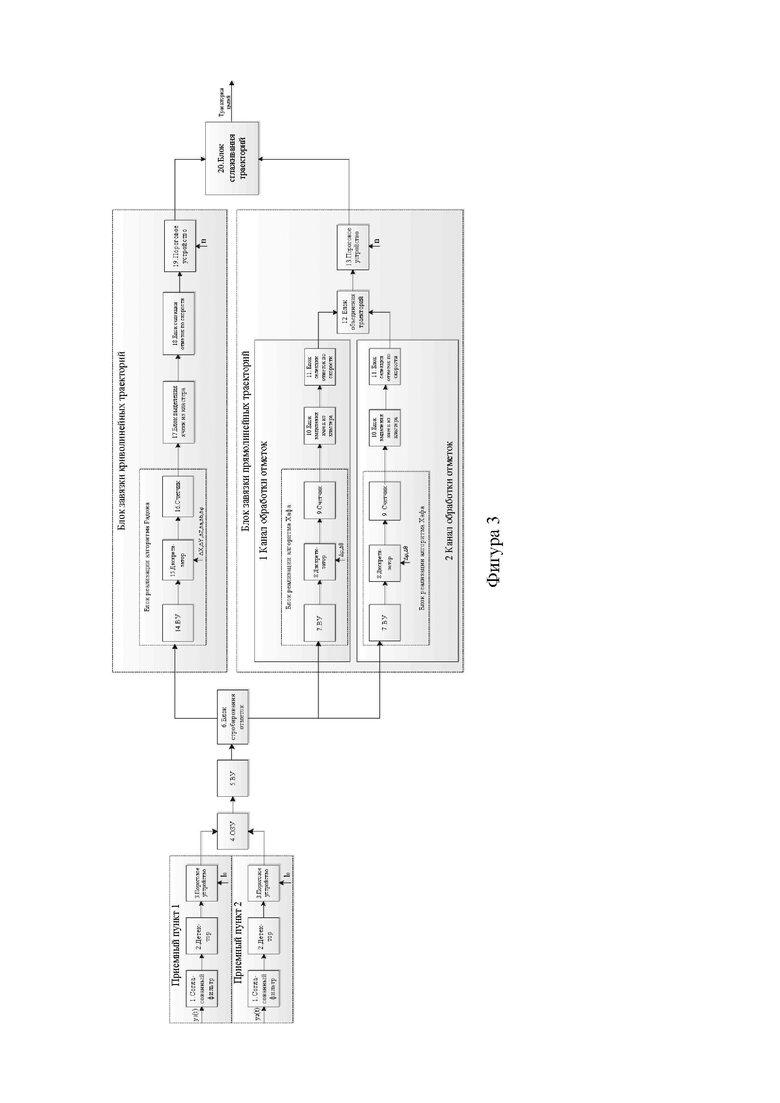
Фиг.4 - заявляемое устройство обнаружения маневрирующих малоразмерных воздушных объектов (целей), реализующее заявляемый способ.
Устройство обнаружения маневрирующих малоразмерных воздушных объектов (целей), реализующее заявляемый способ, содержит (фиг. 4) последовательно соединенные согласованный фильтр 1, детектор огибающей сигнала 2, пороговое устройство 3, блок АЦП 4, оперативное запоминающее устройство 5, вычислительное устройство 6, блок стробирования отметок 7 выходы 1 и 2 которого, согласно изобретению, являются входами каналов обработки отметок блока завязки прямолинейных сегментов траекторий, каждый из которых решает задачу выделения траектории на плоскости, и состоит из последовательно соединенных блока реализации алгоритма Хафа, включающий в себя вычислительное устройство 8, дискретизатор 9 и счетчик 10, блока выделения ячеек из кластера 11, блока селекции отметок по скорости 12, выход которого подключен к входу блока объединения траекторий 13, выход которого подключен ко входу порогового устройства 14, блок завязки криволинейных сегментов траекторий входом которого является 3 выход блока стробирования отметок 7, состоящий из последовательно соединенных блока реализации алгоритма Радона, включающего в себя вычислительное устройство 15, дискретизатор 16, счетчик 17, блока выделения ячеек из кластера 18, блока селекции отметок 19, порогового устройства 20, выход блоков завязки прямолинейных и криволинейных траекторий является входом дополнительно введенного блока отождествления сегментов траекторий 21, выход которого является входом блока выбора истинных траекторий 22 и вход которого соединен с блоком хранения параметров истинных траекторий 23, выход блока 22 является выходом всего устройства.
Промышленная применимость.
Заявляемое устройство может быть исполнено в составе аппаратно-программного комплекса. Например, в составе станции обнаружения целей зенитного ракетно-пушечного «Панцирь-С1» имеется аппаратура обработки информации и управления (АБОУ), которая является аппаратно-программным комплексом [10]. Координатные отметки обрабатываются в физических устройствах - программируемых логических интегральных схемах FPGA1 и FPGA2. В процессе обработки используются микросхемы памяти (ZBT), оперативная память (DDK) и сигнальные процессоры (DSP). Данные с DSP поступают на синхронизирующую микросхему FPGA Sync. Она осуществляет синхронизацию работы двух обрабатывающих FPGA, а также передачу данных по каналу Ethernet в модули ЕТХ Core 2 DUO. В модулях ЕТХ осуществляется траекторная обработка. Каждый ЕТХ модуль имеет флэш-память для загрузки операционной системы. После выполнения вторичной обработки пакеты целей и траекторий передаются в центральную вычислительную систему (ЦВС). Контроллер шины PCI подключен к модулям ЕТХ для осуществления коммутации с мультиплексным каналом информационного обмена для связи с ЦВС. Данные элементы составляют основу аппаратной части.
Программную часть комплекса составляет алгоритм обработки информации, который решает следующие задачи:
- обработку продетектированных эхо-сигналов на промежуточной частоте в приемном устройстве и сравнение их с пороговым уровнем первого этапа обнаружения;
- аналого-цифровое преобразование сигналов с выхода порогового устройства и их межобзорное накопление;
- параллельная реализация параметрических преобразований результатов накопления по алгоритмам Хафа и Радона;
- сравнение результатов после параметрических преобразований с порогом на втором этапе обнаружения и формирование сегментов траекторий;
- объединение сегментов траекторий по заданному критерию и формирование траекторий целей;
- выбор наиболее вероятных (истинных) траекторий путем сравнения с третьим порогом обнаружения, принятия решения об обнаружении целей, а также передачи траекторий на устройство сопровождения;
- хранение априорных параметров истинных траекторий для третьего этапа обнаружения.
Осуществление изобретения
Способ осуществляется следующим образом.
С помощью РЛС осуществляет обзор пространства и обнаружение целей, с заданным порогом (в зависимости от требуемых показателей качества), обеспечивающим обнаружение слабых эхо-сигналов от маневрирующих малоразмерных воздушных объектов. Сигналы от целей и помеховые сигналы, превысившие порог обнаружения, запоминаются в массиве данных, соответствующих, координатам дальности, азимута и угла места. Использование алгоритмов Хафа и Радона позволяет обнаружить прямолинейные и криволинейные сегменты траекторий по результатам накопления радиолокационной информации за несколько обзоров РЛС. Эхо-сигналы прямолинейно движущихся целей, полученные в нескольких периодах обзора, будут выстраиваться в практически прямую линию последовательно друг за другом от обзора к обзору на относительно равных расстояниях. Отметки от маневрирующих воздушных объектов, полученные в нескольких периодах обзора, будут выстраиваться в кривую линию (дугу эллипса) последовательно друг за другом от обзора к обзору на относительно равных расстояниях. Ложные отметки помех могут появляются случайно в разных элементах разрешения.
Результаты сравнения с порогом первого этапа обнаружения блока 3, полученные в каждом обзоре оцифровываются в блоке 4, сохраняются в блоке 5, в блоке 6 переводятся из сферической системы координат в декартовую и в блоке 7 подвергаются группированию.
Согласно принятой концепции блочного построения алгоритма обнаружения траектории, стробирование осуществляется для всех отметок, поступающих за время накопления, не отождествленных с обнаруженными траекториями. За центр строба захвата принимается начальная отметка обнаруживаемой траектории, а его размер традиционно определяется с использованием априорно заданных минимальных и максимальных скоростей движения предполагаемых целей. Сформированные после стробирования группы отметок подвергаются параметрическим преобразованиям Хафа и Радона.
С блока стробирования отметок данные поступают на входы каналов обработки отметок блока завязки прямолинейных траекторий, где осуществляется выделение сегментов прямолинейных траекторий на плоскостях XY, YZ. Выходом блока реализации алгоритма Хафа будут матрицы с отметками, принадлежащими одной прямой, следы которых попали в ячейку с превышенным порогом.
На вход блока селекции отметок по скорости поступают матрицы, соответствующие наборам отметок, принадлежащим одной прямой. Селекция отметок выполняется для выделения нескольких траекторий, лежащих на одной прямой, и фильтрации ложных отметок, попавших на ту же прямую. Все отметки, принадлежащие обнаруженной прямой, сгруппированы по времени. Далее рассчитываются расстояния между отметками, которые принадлежат разным временным ячейкам. Из всех отметок формируются группы (предполагаемые траектории) следующим образом: во-первых, группе может принадлежать только одна отметка из каждой временной ячейки (селекция по времени), во-вторых, расстояния, между отметками ячеек, не должны превышать максимально допустимого значения.
На выходе блока формируется матрица, соответствующая траектории воздушного объекта в пространстве. В случае, если количество отметок одной траектории превысило значение порога, принимается решение об обнаружении траектории, и формируется прямолинейный сегмент траектории, составленный из отметок с координатами х, у, z, t. Полученный массив данных поступает на вход блок отождествления сегментов траекторий.
Также с блока стробирования отметок 7 данные поступают на вход блока завязки криволинейных траекторий в вычислительное устройство блока реализации алгоритма Радона, где осуществляется обнаружение криволинейных сегментов траекторий воздушных объектов.
После завязки сегментов траекторий решается задача их отождествления в блоке 21 между собой с целью обнаружения траекторий, например, за счет объединения окончания одного сегмента с началом другого. В обнаруженных сегментах траектории могут находиться идентичные отметки. Для правильного отождествления и объединения сегментов траектории находятся идентичные отметки, которые исключаются из одного сегмента траектории. Параметрами объединения являются значения скорости движения целей на конечном (начальном) сегменте и время обнаружения первой (последней) отметки.
После объединения сегментов, количество отметок, расположенных вдоль траектории, сравнивается с порогом по критерию «m из n», и на этом основании принимается решение об обнаружении или необнаружении траекторий. Результатом объединения могут быть ложные траектории. Для их исключения происходит сравнение параметров траекторий с параметрами, соответствующим истинным траекториям в блоке 23, и выбор наиболее вероятных (истинных) из всех обнаруженных в блоке 22. В случае, когда будет завязываться несколько траекторий (в т.ч. ложных), каждой из них будет присваиваться определенный вес. По результатам сравнения траектория с наибольшим весом будет принята за истинную. Одновременно с принятием решения об обнаружении траектории принимается решение об обнаружении воздушного объекта.
Таким образом, решается задача обнаружения маневрирующих малоразмерных воздушных объектов одновременно с построением их траекторий с использованием параметрических преобразований, чем достигается заявляемый технический результат.
Список используемой литературы
1. Пат. 2553459 Российская Федерация, МПК G01S 13/06 (2006.01). Способ обнаружения траектории маневрирующего объекта / В.А. Белокуров, Д.Н. Козлов, В.И. Кошелев; заявитель и патентообладатель ФГБОУВПО «Рязанский государственный радиотехнический университет.№2014104650/07; заявл. 10.02.2014; опубл. 20.06.2015, Бюл. №17.
2. Пат. 2710202 Российская Федерация, МПК G01S 13/58 (2006.01). Способ радиолокационного обнаружения траектории цели/ И.В. Колбаско; заявитель и патентообладатель И.В. Колбаско. - №2019113588; заявл. 30.04.2019; опубл. 25.12.2019, Бюл. №36.
3. Пат. 2777652 Российская Федерация, МПК G01S 13/52 (2006.01). Способ обнаружения малоразмерных воздушных объектов и устройство для его реализации / А.В. Голубев; заявитель и патентообладатель А.В. Голубев. -№2021108285; заявл. 26.03.2021; опубл. 08.08.2022, Бюл. №22.
4. Пат. 2776417 Российская Федерация, МПК G01S 7/41 (2006.01), G01S 13/04 (2006.01). Комплексный обнаружитель криволинейных траекторий воздушных объектов с использованием параметрических преобразований / Н.А. Лешко, И.С. Ашурков, А.В. Кадыков и др.; заявитель и патентообладатель ФГКВОУВО Ярославское высшее военное училище ПВО. - №2021134114; заявл. 22.11.2021; опубл. 19.07.2022, Бюл. №20.
5. Теория обнаружения сигналов. П.С. Акимов, П.А. Бакут, В.А. Богданович и др.; Под. ред. Бакута П.А. - М.: Радио и связь, 1984.
6. Коновалов А.А. Основы траекторной обработки радиолокационной информации. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2013. С. 145-148.
7. Ашурков И.С, Житков С.А., Захаров И.Н., Лешко Н.А., Мороз А.В., Сахно И.В., Имитационная модель процесса обнаружения аэродинамических целей на основе параметрических преобразований в многопозиционной локационной системе // Успехи современной радиоэлектроники. 2020. Т. 74. №12. С. 2-44.
8. Пат. 27322916 Российская Федерация, МПК G06G 7/78 (2006.01), G01S 13/00 (2006.01). Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа / С.А. Житков, Н.А. Лешко, И.С. Ашурков, И.Н. Захаров, А.Н. Цыбульник, заявитель и патентообладатель ФГКВОУВО Ярославское высшее военное училище ПВО. - №2019119734; заявл. 24.06.2019; опубл. 24.09.2020, Бюл. №27.
9. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - Киев: КВЩ, 2000.
10. Руководство по эксплуатации. Часть 4. Станция обнаружения целей. 72В6-Е2.00.00.000-01РЭ3.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777652C1 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| Система обработки радиолокационной информации | 2020 |
|
RU2765564C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ГРУППЫ ОДНОТИПНЫХ МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2787843C1 |
Изобретение относится к области радиолокации и может быть использовано в обзорных и секторных радиолокационных станциях (РЛС) для решения задач обнаружения маневрирующих малоразмерных воздушных объектов (целей) в условиях низких значений отношения сигнал-шум. Достигаемый технический результат - увеличение дальности обнаружения маневрирующих малоразмерных воздушных объектов и повышение вероятности обнаружения истинных траекторий в условиях низких значений отношения сигнал-шум. В заявленном способе производят снижение первичного порога обнаружения сигналов, накопление отметок за несколько обзоров РЛС, группирование отметок, использование параметрических преобразований Хафа и Радона к сформированным группам, восстановление сегментов траекторий и их объединение по пространственно-временным параметрам. После чего осуществляется выбор наиболее вероятных траекторий и одновременно принимается решение об обнаружении целей. Заявлено также устройство для осуществления способа. 2 н.п. ф-лы, 4 ил.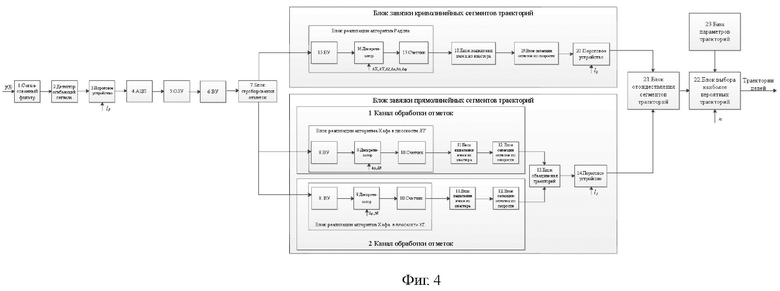
1. Способ обнаружения маневрирующих малоразмерных воздушных объектов, включающий согласованную фильтрацию принимаемых радиолокационной станцией (РЛС) сигналов с последующим выделением их огибающих, аналого-цифровое преобразование, сравнение в каждом элементе разрешения с порогом обнаружения и их межобзорное накопление, отличающийся тем, что осуществляют стробирование всех отметок, поступающих за время накопления, при этом за центр строба захвата принимают начальную отметку обнаруживаемой траектории, а его размер определяют с использованием заданных минимальных и максимальных скоростей движения предполагаемых целей, сформированные после стробирования группы отметок передают на два канала обработки радиолокационной информации, где для накопленной выборки отметок осуществляют параметрические преобразования Хафа и Радона, далее сравнивают результаты преобразований в пороговом устройстве второго этапа обнаружения, по результатам которого восстанавливают прямолинейные и криволинейные сегменты траекторий предполагаемых целей по результатам накопления радиолокационной информации за несколько обзоров РЛС, объединяют сегменты траекторий по пространственно-временным параметрам, находят идентичные отметки, которые исключают из одного сегмента траектории, при этом в качестве параметров объединения используют значения скорости движения целей на конечном или начальном сегменте и время обнаружения первой или последней отметки соответственно, после объединения сегментов траекторий количество отметок, расположенных вдоль траектории, сравнивают с порогом по критерию «m из n» и принимают решение об обнаружении или необнаружении траектории цели, после чего осуществляют выбор наиболее вероятных траекторий путем сравнения с третьим порогом обнаружения истинных траекторий и одновременно принимают решение об обнаружении целей.
2. Устройство обнаружения маневрирующих малоразмерных воздушных объектов, содержащее последовательно соединенные согласованный фильтр, детектор огибающей сигнала, пороговое устройство, блок АЦП, оперативное запоминающее устройство, вычислительное устройство, блок стробирования отметок, отличающееся тем, что выходы блока стробирования отметок являются входами каналов обработки отметок блока завязки прямолинейных сегментов траекторий и блока завязки криволинейных сегментов траекторий, каждый из которых решает задачу выделения траектории на плоскости, при этом блок завязки прямолинейных сегментов траекторий состоит из последовательно соединенных блока реализации алгоритма Хафа, включающего в себя вычислительное устройство, дискретизатор и счетчик, блока выделения ячеек из кластера, блока селекции отметок по скорости, выход которого подключен к входу блока объединения траекторий, выход которого подключен ко входу порогового устройства, а блок завязки криволинейных сегментов траекторий состоит из последовательно соединенных блока реализации алгоритма Радона, включающего в себя вычислительное устройство, дискретизатор, счетчик, блока выделения ячеек из кластера, блока селекции отметок по скорости, порогового устройства, выход блоков завязки прямолинейных и криволинейных сегментов траекторий является входом дополнительно введенного блока отождествления сегментов траекторий, выход которого является входом блока выбора истинных траекторий и вход которого соединен с блоком хранения параметров истинных траекторий, выход блока является выходом всего устройства.
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777652C1 |
| Комплексный обнаружитель прямолинейной траектории воздушного объекта в пространстве с использованием преобразования Хафа | 2019 |
|
RU2732916C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2019 |
|
RU2710202C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| АШУРКОВ И.С., ЖИТКОВ С.А., ЛЕШКО Н.А., ТИМОШЕНКО А.В | |||
| Методика обнаружения криволинейных траекторий воздушных целей с использованием параметрических преобразований // Радиотехника | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
