Область техники, к которой относится изобретение
Заявляемые технические решения относятся к области радиолокации и могут быть использованы в обзорных доплеровских радиолокационных станциях (РЛС) при сопровождении траекторий маневрирующих целей.
Уровень техники
Известны способ автоматического сопровождения в РЛС цели и устройство, построенное на основе этого способа (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей, М.: «Радио и связь», 1993, стр. 25-30), содержащее: блок завязки новой траектории, блок проверки принадлежности отметок из системы первичной обработки радиолокационной информации (ПОИ) сопровождаемой траектории (блок селекции отметок), блок сглаживания и экстраполяции, блок прекращения сопровождения.
Данный способ и устройство работают следующим образом. Сначала по двум последовательным циклам зондирования в процессе обзора завязывается новая траектория и определяются ее начальные параметры (углы места и азимута, а также дальность и радиальная скорость). Затем в блоке сглаживания и экстраполяции производится прогнозирование этих параметров на следующий момент сопровождения цели. По направлению, соответствующему экстраполированным углам места и азимута, производится излучение сигнала антенной РЛС. При поступлении новых измерений в блоке селекции отметок по экстраполированным значениям дальности и радиальной скорости цели с учетом возможных помех и ошибок в измеренных отметках строится строб, после чего из всех отметок, попавших в этот строб, выбирается ближайшая к его центру и привязывается к сопровождаемой траектории. Оставшиеся из попавших в строб отметок либо отбрасываются, как ложные, либо по ним производится попытка завязать новые трассы в блоке завязки новой траектории. В блоке сглаживания и экстраполяции производится фильтрация (сглаживание) траекторных параметров цели на основе полученного нового измерения (привязанной к трассе отметки), а также прогнозирование (экстраполяция) этих параметров на следующий момент сопровождения цели. Сглаженная оценка текущих траекторных параметров цели выдается в устройство - потребитель радиолокационной информации. При отсутствии отметок в стробе в качестве сглаженного значения траекторных параметров цели берутся их экстраполированные значения, т.е. имеет место так называемое инерциальное сопровождение (ИС). При этом в блоке прекращения сопровождения постоянно проверяется условие сброса траектории, которое состоит в превышении некоторого критического количества непрерывных неудачных попыток получить измерения от цели или заданного предельного времени ИС.
Основной проблемой при сопровождении траекторий воздушных целей в обзорных РЛС является их потеря в ситуациях, когда цель совершает резкий маневр по скорости или направлению, например, при ее развороте. Причем, для работы обзорных РЛС характерна нерегулярная частота измерений траекторных параметров сопровождаемых целей, поскольку одновременно с сопровождением, как правило, происходит обзор пространства, обнаружение и завязка новых целей, а также сброс потерянных, т.е. количество сопровождаемых одновременно трасс может постоянно меняться. Кроме того, при осуществлении такого маневра, как разворот, цель может в течение достаточно продолжительного времени находиться «на параметре», т.е. иметь радиальную скорость ниже скорости обрезки, заданной в блоке селекции движущихся целей (СДЦ), что также приводит к отсутствию измерений траекторных параметров в течение достаточно продолжительного времени.
В такие периоды длительного отсутствия траекторных измерений особое значение приобретает точность сглаживания текущих координат сопровождаемых целей, а также их экстраполяции, на основе которой определяется направление луча на сопровождаемую цель и производится стробирование по дальности и радиальной скорости получаемых из ПОИ отметок. Низкая точность экстраполяции при маневре по направлению может привести к потере цели по причине ее выхода за пределы диаграммы направленности антенны (ДНА), что приводит к пропаданию отметок из ПОИ. При резком маневре по скорости трасса может быть потеряна вследствие выхода полученной отметки от цели за пределы строба по дальности или скорости. В этом случае низкая точность экстраполяции отчасти может быть скомпенсирована расширением стробов. Однако, при таком подходе сильно возрастает вероятность привязки к трассе ложных отметок, обусловленных отражениями от местных предметов, внутренним шумом приемника, преднамеренными помехами и т.п., что в дальнейшем также может привести к потере трассы.
Очевидно, что при отсутствии актуальных измерений траекторных параметров, точность их оценивания и экстраполяции сильно зависит от используемой в способе трассового сопровождения кинематической модели движения цели. В известных алгоритмах фильтрации (α-β-γ-фильтры, различные типы фильтров Калмана и т.п.), как правило, используются модели движения цели первого или второго порядка, в которых движение описывается линейным или квадратичным полиномом, т.е. оцениваются координаты цели, а также их первые (скорости) или первые и вторые (ускорения) производные, соответственно (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М: «Советское радио», 1974, стр. 211-234). Причем, каждый из этих типов моделей обладает своими достоинствами и недостатками. Модели первого порядка просты и хорошо описывают прямолинейное равномерное движение цели. Однако, при наличии маневров и относительно длительных интервалов между измерениями качество получаемых оценок существенно снижается, вплоть до расходимости алгоритмов фильтрации. Модели второго порядка являются более сложными, они лучше описывают движение маневрирующих по скорости и направлению целей, однако, на участках прямолинейного равномерного движения цели ошибки оценивания с использованием таких моделей также могут существенно возрастать.
Совместить достоинства обоих типов моделей движения целей позволяют адаптивные алгоритмы фильтрации, которые можно разделить на алгоритмы с параметрической и алгоритмы со структурной адаптацией (Бар_Шалом Я., Ли Х.-Р. Траекторная обработка. Принципы, способы и алгоритмы: часть 2, М: МГТУ им. Баумана, 2011, стр. 155-219). Алгоритмы с параметрической адаптацией, как правило, работая с моделью движения цели первого порядка, при обнаружении маневра изменяют какой-либо из параметров, например, коэффициент усиления фильтра или матрицу ковариаций входного шума, описывающую неизвестные составляющие ускорения. Алгоритмы со структурной адаптацией в зависимости от наличия, отсутствия или типа маневра могут использовать несколько моделей движения цели (многорежимное или многомодельное сопровождение), например, если используются модели движения цели первого и второго порядков, то такие алгоритмы называются алгоритмами с вектором состояния переменной размерности.
Параметрическая адаптация, как правило, за счет общего снижения точности оценивания, позволяет предотвратить расходимость фильтра при существенном несоответствии используемой модели движения цели текущей действительности. Недостатком алгоритмов со структурной адаптацией является их высокая сложность, связанная с необходимостью использования нескольких моделей движения цели и организации корректных переключений между ними. Наконец, общим недостатком любых адаптивных алгоритмов является необходимость вычисления в реальном времени индикатора маневра цели, в роли которого чаще всего выступает некоторая функция от разности измеренного и упрежденного значений выходной переменной трассового фильтра, так называемый «обновляющий» процесс. При этом, учитывая случайный характер этого процесса, для исключения частых ложных срабатываний индикатора маневра приходится прибегать к процедурам усреднения, что неизбежно вызывает запаздывание реакции адаптивных алгоритмов на изменение характера движения цели.
Наиболее близкие к заявляемым изобретениям способ и устройство сопровождения маневрирующих целей представлены в патенте РФ [RU №2630252 С1, МПК G01S 13/66, Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления, 2016 г.]. Предлагаемые в прототипе способ и устройство в целом используют классический подход к сопровождению воздушных целей. Основным отличием является то, что в качестве центра строба на следующем шаге сопровождения используются не непосредственно экстраполированные трассовым фильтром координаты цели, а уточненные координаты, скорректированные с использованием вычисленного на текущем шаге сопровождения «обновляющего» процесса. Причем такая коррекция производится только в случае превышения значением «обновляющего» процесса некоторого заранее заданного порога, зависящего от ошибок измерения соответствующей координаты. Вычисляемые размеры стробов также зависят от абсолютного значения разности между измерением и упреждением соответствующей координаты.
Важным достоинством предлагаемого в прототипе способа сопровождения является то, что скорректированные координаты центра строба используются только для селекции отметок от цели и их привязки к траектории. В процессе же фильтрации, а значит и экстраполяции для следующего шага сопровождения продолжает использоваться соответствующее нескорректированное значение упреждения с предыдущего шага. Таким образом, адаптации при возможном маневре цели подвергается не процедура фильтрации, а процедуры стробирования и селекции отметок, а также их привязки к траектории. Это позволяет, не усложняя алгоритмов сглаживания и экстраполяции, используя, например, простейшие α-β-фильтры, добиться качества сопровождения маневрирующих целей, близкого к многомодельным методам.
Главным недостатком предлагаемого в прототипе способа является его слабая помехозащищенность, являющаяся следствием зависимости коррекции центра строба только от величины и знака «обновляющего» процесса на предыдущем шаге сопровождения. Действительно, при резком маневре цели по направлению движения или по скорости, при условии относительно точного измерения произойдет пропорциональное величине маневра увеличение разности между измерением и упреждением соответствующей координаты, превышающее заданное пороговое значение. Это приведет к коррекции центра строба, задаваемого для следующего измерения, и его смещению в сторону маневра, т.е. предлагаемый способ тем самым повысит вероятность успешного стробирования отметки от маневрирующей цели на следующем шаге сопровождения. Однако, если предположить, что на некотором шаге сопровождения при отсутствии маневра по каким-то другим причинам резко возросла случайная ошибка измерения или в строб попала единственная ложная отметка, расположенная близко к его краю, то на следующем шаге центр строба окажется уже значительно смещенным в сторону от реальной траектории, что в дальнейшем вполне может привести к потере трассы. Заметим, что в прототипе величина такого смещения центра строба по угловым координатам будет ограничена сверху половиной ширины ДНА, а по дальности и скорости половиной размера соответствующего строба на предыдущем шаге сопровождения. Причем, для стробов по дальности и скорости некорректное смещение их центра из-за ошибок измерений или привязки ложной отметки при отсутствии регулярных сопровождений может быть не скомпенсировано изменением их размера, который в прототипе также зависит только от абсолютного значения «обновляющего» процесса и не зависит от промежутка времени между измерениями. Таким образом, в реальной помеховой обстановке, в которой приходится работать современным обзорным РЛС, предлагаемый в прототипе способ сопровождения может не только снизить вероятность потери трассы из-за маневра цели, но и в отдельных случаях повысить такую вероятность при появлении больших однократных случайных ошибок измерений или при привязке к трассе ложной отметки в условиях отсутствия какого-либо маневра.
Другим недостатком предлагаемого в прототипе способа является используемая в нем зависимость размера стробов только от СКО ошибок измерения соответствующего параметра и абсолютного значения «обновляющего» процесса на предыдущем шаге сопровождения. Причем, способ получения коэффициентов, определяющих такую зависимость, в описании прототипа не представлен, имеется лишь пример их задания для конкретной РЛС и типа цели. При этом, хорошо известно, что в обзорных РЛС, для которых характерна переменная частота измерений, размер стробов также существенно зависит от времени между предыдущим и текущим измерениями, поскольку общая ошибка упреждения с увеличением этого времени, естественно, возрастает.
Раскрытие сущности изобретения
Техническим результатом заявляемых способа и устройства является повышение вероятности корректной привязки к сопровождаемой трассе отметок от цели, движущейся, как равномерно прямолинейно, так и интенсивно маневрирующей. Таким образом, предлагаемые решения при использовании их в обзорных РЛС позволят существенно повысить устойчивость сопровождения любых типов целей на любых участках их траекторий. Причем такой результат может быть достигнут с помощью относительно простых и надежных классических методов фильтрации на основе полиномиальных моделей движения цели первого порядка, без применения сложных адаптивных процедур.
Технический результат достигается тем, что при сопровождении цели в обзорной доплеровской РЛС для коррекции центров стробов по дальности и радиальной скорости относительно их экстраполяции основным трассовым фильтром, а также для вычисления размеров стробов на каждом шаге сопровождения используют результаты автономного сглаживания и экстраполяции измеряемой доплеровской скорости и ускорения, получаемые с помощью специального дополнительного фильтра с полиномиальной моделью первого порядка, который работает параллельно с основным трассовым фильтром, сглаживающим и экстраполирующим дальность и угловые координаты.
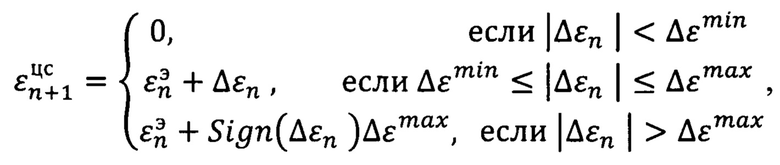
При этом, уточнение центров стробов по угловым координатам осуществляют по аналогии с прототипом с использованием выражений:


где  и
и  - экстраполированные на шаг сопровождения n+1 азимут и угол места цели, полученные в основном трассовом фильтре на шаге n; Δβn и Δεn - значения обновляющих процессов по соответствующим углам на шаге n; Sign(Δβn) и Sign(Δεn) - знак обновляющего процесса по соответствующему углу; Δβmin и Δεmin - пороговое значение, при превышении которого срабатывает процедура коррекции центра строба; Δβmax и Δεmax - верхняя граница, которую не может превышать величина коррекции центра строба.
- экстраполированные на шаг сопровождения n+1 азимут и угол места цели, полученные в основном трассовом фильтре на шаге n; Δβn и Δεn - значения обновляющих процессов по соответствующим углам на шаге n; Sign(Δβn) и Sign(Δεn) - знак обновляющего процесса по соответствующему углу; Δβmin и Δεmin - пороговое значение, при превышении которого срабатывает процедура коррекции центра строба; Δβmax и Δεmax - верхняя граница, которую не может превышать величина коррекции центра строба.
Пороговые значения Δβmin и Δεmin задают аналогично прототипу на основе априорной информации о точности измерений угловых координат следующим образом:
Δβmin=kпрσβ,
Δεmin=kпрσε,
где kпр - настраиваемый коэффициент, определяющий нижнюю границу принятия решения о том, что данное значение процесса обновления с большой вероятностью является следствием начинающегося маневра, а не случайных ошибок в упреждении и измерении соответствующей угловой координаты; σβ и σε - СКО ошибок измерения соответствующих угловых координат.
В заявляемом способе с целью повышения его помехозащищенности в отличие от прототипа предлагается дополнительно ограничить величину коррекции центра строба по угловым координатам, введя для нее верхние границы Δβmax и Δεmax следующим образом:
Δβmax=kвгSβ,
Δεmax=kвгSε,
где kвг<1 - настраиваемый коэффициент, определяющий максимально возможное значение поправки, вводимой в упреждение угловой координаты; Sβ и Sε - половина ширины ДНА по соответствующей угловой координате.
Очевидно, что при ограничениях (1), (2) для коэффициентов kпр и kвг должны выполняться условия: kпрσβ<kвгSβ; kпрσε<kвгSε.
Благодаря ограничению величины коррекции центра строба по угловым координатам сверху появляется возможность снизить негативное влияние однократных больших случайных ошибок измерений или привязки ложных отметок, находящихся близко к границам строба, на последующее сопровождение не маневрирующей цели.
Коррекцию центров стробов по дальности и радиальной скорости в заявляемом изобретении в отличие от прототипа предлагается производить, используя результаты работы специального дополнительного фильтра, осуществляющего автономное сглаживание и экстраполяцию измеряемой доплеровской скорости и ускорения, следующим образом:


где  и
и  - экстраполированные на шаг сопровождения n+1 дальность и радиальная скорость цели, полученные в основном трассовом фильтре на шаге n;
- экстраполированные на шаг сопровождения n+1 дальность и радиальная скорость цели, полученные в основном трассовом фильтре на шаге n;  - экстраполированное на шаг сопровождения n+1 радиальное ускорение, полученное в автономном фильтре измеряемой доплеровской скорости; ΔTn+1 - интервал времени между n+1 и n шагами сопровождения.
- экстраполированное на шаг сопровождения n+1 радиальное ускорение, полученное в автономном фильтре измеряемой доплеровской скорости; ΔTn+1 - интервал времени между n+1 и n шагами сопровождения.
В принципе выражения (3) и (4) для каждой из траекторных координат совпадают с кинематической моделью движения цели, аппроксимирующей ее траекторию полиномом второго порядка. Такой подход, по сравнению с прототипом, в котором центры стробов по дальности и радиальной скорости также, как и по угловым координатам, корректируют исключительно в зависимости от значения обновляющего процесса, являющегося в общем случайной величиной, представляется более корректным, так как в его основе лежат известные детерминированные законы механики движения тел.
Заявляемый технический результат достигается также тем, что размеры половин стробов сопровождения по дальности и скорости (от центра строба в сторону увеличения или уменьшения) при каждом n+1 обращении к цели также определяют на основе кинематической модели движения цели:


где Dпчс и Vrпчс - постоянные части стробов по дальности и скорости, зависящие от точности измерения соответствующего параметра.
Важной особенностью заявляемого изобретения является то, что сглаживание и экстраполяцию траекторных параметров предлагается производить не одним фильтром с моделью движения цели второго порядка, а двумя параллельно работающими раздельными фильтрами: основным трассовым, использующим измерения дальности, угловых координат и, необязательно, доплеровской скорости, а также автономным, работающим исключительно с доплеровскими измерениями радиальной скорости цели. При этом оба фильтра строятся на основе модели движения цели в виде полинома первого порядка, что значительно упрощает их реализацию.
Таким образом, в основном трассовом фильтре не будет оцениваться ускорение цели, оно лишь учитывается в виде случайного возмущения в динамической части модели движения. Результатом же работы автономного фильтра доплеровских измерений будут сглаженные и экстраполированные радиальная скорость и радиальное ускорение, которые, собственно говоря, и используются в выражениях (3) - (6) для коррекции центров соответствующих стробов и расчета их размеров.
Благодаря использованию двух раздельных фильтров с моделью движения цели первого порядка вместо трассового фильтра второго порядка, удается не только упростить реализацию всей процедуры сопровождения, но и повысить ее точность и устойчивость. Дело в том, что в трассовом фильтре с моделью движения второго порядка, например, Калмановского типа, оценки дальности и радиальной скорости вычисляются по соответствующим взвешенным измерениям. Причем, весовые коэффициенты в этом случае будут обратно пропорциональны дисперсиям ошибок соответствующих измерений. Следовательно, оценки дальности и радиальной скорости будут иметь СКО близкие к минимально возможным только в том случае, когда абсолютно точно заданы априорные значения дисперсий шумов в измерениях. Однако, в реальных условиях применения РЛС сделать это проблематично, поскольку шумы в измерениях скорее всего не стационарны, и поэтому их характеристики в каждый момент времени априори точно заданы быть не могут. Также следует иметь ввиду, что скорости и ускорения по измерениям дальности в фильтрах Калмановского типа определяются путем однократного и двукратного численного дифференцирования, соответственно. Это наряду с некорректным соотношением заданных и реальных дисперсий шумов в измерениях также способно внести дополнительные погрешности в оценки скоростей и ускорений.
В заявляемом изобретении в качестве основного трассового фильтра в принципе можно использовать любые традиционные для радиолокации фильтры Калмановского типа с моделью движения цели первого порядка или даже простейшие α-β-фильтры с оцениванием траекторных параметров в прямоугольной или сферической системах координат. В качестве автономного фильтра доплеровских измерений также можно использовать α-β-фильтр или фильтр для оценки параметров линейной траектории при фиксированном объеме скользящей выборки (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М.: «Советское радио», 1974, стр. 215-220). В результате, как и в прототипе, не прибегая к громоздким процедурам адаптации можно добиться качества сопровождения, как маневрирующих, так и не маневрирующих целей, близкого к многомодельным методам.
Таким образом достигается заявляемый технический результат. Краткое описание чертежей
Заявляемые технические решения иллюстрируются фигурой 1, где представлена структурная схема устройства для сопровождения маневрирующих целей в обзорной доплеровской РЛС, реализующая способ.
Заявляемое устройство для сопровождения маневрирующих целей в обзорной доплеровской РЛС, реализующее заявляемый способ, содержит блок стробирования и селекции отметок цели (БСиСОЦ) 1, блок проверки критерия сброса траектории (БПКСТ) 2, блок фильтрации параметров траектории цели (БФПТЦ) 3, блок вычисления координат центра строба (БВКЦС) 4, блок вычисления размеров строба (БВРС) 5, блок автономной фильтрации доплеровской скорости (БАФДС) 6, при этом первый вход БСиСОЦ 1 является входом устройства, на который поступают результаты измерений угловых координат, дальности и радиальной скорости отметок из ПОИ, первый выход БСиСОЦ 1 соединен со входом БПКСТ 2, первый выход которого соединен со входом БФПТЦ 3, первый и второй выходы которого соединены с первым и вторым входами БВКЦС 4, соответственно, первый выход БВКЦС 4 соединен со вторым входом БСиСОЦ 1, второй выход БВКЦС 4 соединен с первым входом БВРС 5, второй выход БПКСТ 2 соединен со вторым входом БВРС 5 и третьим входом БВКЦС 4, второй выход БСиСОЦ 1 соединен со входом БАФДС 6, первый выход которого соединен с четвертым входом БВКЦС 4 и третьим входом БВРС 5, выход БВРС 5 соединен с третьим входом БСиСОЦ 1, второй выход БАФДС 6 является выходом устройства, на который выдают сглаженные радиальную скорость и радиальное ускорение, третий выход БПКСТ 2 является выходом устройства, на который выдают сигнал сброса траектории с сопровождения, третий выход БФПТЦ 3 является выходом устройства, на который выдают сглаженные угловые координаты, дальность и радиальная скорости. Осуществление изобретения
Заявляемое устройство состоит из перечисленных ниже известных и широко применяемых в радиолокации функциональных блоков (Справочник по радиолокации / Под ред. М.И. Сколника. В 2-х книгах, М.: Техносфера, 2014), которые могут быть реализованы с использованием стандартных цифровых микросхем и электронных элементов (Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах, М.: «Радио и связь», 1990; Все отечественные микросхемы / 2-ое изд., М.: Изд. дом «Додэка XXI», 2004).
Блок стробирования и селекции отметок цели (БСиСОЦ) 1 - вычислитель, реализующий операцию выбора из всех отметок, пришедших из ПОИ и попавших в стробы по дальности (5) и скорости (6), единственной отметки, евклидово расстояние от которой до скорректированного центра строба (1) - (4) минимально. Данная отметка считается новым измерением и привязывается к сопровождаемой траектории. Если отметок не было или ни одна из них не попала в строб, то формируется специальный признак пропуска цели.
Блок проверки критерия сброса траектории (БПКСТ) 2 - вычислитель, реализующий операцию подсчета количества пропусков цели подряд или операцию суммирования интервалов времени ΔTn+1, на которых был установлен признак пропуска цели. При выполнении критерия сброса по количеству пропусков или по непрерывному времени инерциального сопровождения траектория цели сбрасывается.
Блок фильтрации параметров траектории цели (БФПТЦ) 3 -вычислитель, реализующий операции сглаживания и экстраполяции траекторных параметров цели (основной траекторный фильтр). На вход БФПТЦ 3 через БПКСТ 2 с БСиСОЦ 1 поступает либо новое измерение траекторных параметров (новая отметка из ПОИ, привязанная к сопровождаемой траектории), либо признак пропуска цели. В первом случае производится сглаживание по новым измерениям текущих траекторных параметров и экстраполяция параметров на следующий шаг сопровождения. Во втором случае экстраполированные на предыдущем шаге параметры принимаются за сглаженные, и производится новая экстраполяция параметров на следующий шаг сопровождения. С первого выхода БФПТЦ 3 выдаются экстраполированные на следующее обращение к цели траекторные параметры, а со второго выхода - величины отклонений измеренных угловых координат цели от их экстраполированных на текущий шаг значений (элементы вектора обновляющего процесса).
Блок вычисления координат центра строба (БВКЦС) 4 - вычислитель, реализующий операции вычисления скорректированных координат центра строба сопровождения по выражениям (1) - (4).
Блок вычисления размеров строба (БВРС) 5 - вычислитель, реализующий операции вычисления размеров строба сопровождения по выражениям (5) - (6).
Блок автономной фильтрации доплеровской скорости (БАФДС) 6 - вычислитель, реализующий операции сглаживания и экстраполяции доплеровской скорости и ускорения.
Заявляемое устройство работает следующим образом.
При каждом обращении к цели для ее сопровождения луч антенны РЛС выставляют по экстраполированным в основном траекторном фильтре (БФПТЦ 3) траекторным параметрам и в сторону цели выполняют посылку импульсного сигнала. Приемным устройством РЛС принимают отраженный сигнал, и в устройстве ПОИ путем пороговой обработки выделяют возможные отметки от цели.
На текущем (n+1)-м шаге сопровождения координаты таких отметок, если они были получены из ПОИ, подают на первый вход БСиСОЦ 1, на второй вход которого поступают координаты центра строба с первого выхода БВКЦС 4, а на третий вход - значения размеров стробов по дальности и скорости с выхода БВРС 5, которые были вычислены на предыдущем n-м обращении. В БСиСОЦ 1 сначала выбирают все отметки, попавшие в стробы по дальности и скорости, а затем из них выбирают единственную отметку, евклидово расстояние от которой до скорректированного центра строба (1) - (4) минимально. Данная отметка считается новым измерением и привязывается к сопровождаемой траектории.
Если отметок из ПОИ не было или ни одна отметка не попала в строб, то формируют специальный признак пропуска цели, который передают в БПКСТ 2. В этом блоке проверяют условие выполнения критерия сброса траектории. При выполнении критерия сброса по количеству пропусков или по непрерывному времени инерциального сопровождения траектория цели сбрасывается. Иначе новое измерение из БСиСОЦ 1 или признак пропуска цели передают в БФПТЦ 3, где в первом случае основным трассовым фильтром производят сглаживание по новым измерениям текущих траекторных параметров и экстраполяция параметров на следующий шаг сопровождения, а во втором случае экстраполированные на предыдущем шаге параметры принимают за сглаженные, и производят новую экстраполяцию параметров на следующий шаг сопровождения.
В БВКЦС 4 по экстраполированным дальности и радиальной скорости, а также по разностям между экстраполированными и измеренными на предыдущем шаге сопровождения угловыми координатами, поступающими из БФПТЦ 3, и по экстраполированному радиальному ускорению из БАФДС 6, а также с учетом интервала времени ΔTn+1 между текущим и предыдущим измерениями из БПКСТ 2 с использованием выражений (1) - (4) вычисляют скорректированные координаты центра строба.
В БВРС 5 с использованием выражений (5) - (6) по скорректированному значению центра строба радиальной скорости из БВКЦС 4, по экстраполированному радиальному ускорению из БАФДС 6 и по интервалу времени ΔTn+1 между текущим и предыдущим измерениями из БПКСТ 2 вычисляют размеры стробов по дальности и радиальной скорости.
БАФДС 6 используется для вычисления экстраполированных и сглаженных радиальных скорости и ускорения по измерениям доплеровской скорости цели из БСиСОЦ 1. Вычисленное в этом блоке экстраполированное радиальное ускорение используют для вычисления центров и размеров стробов в БВКЦС 4 и в БВРС 5, соответственно.
Описанные выше операции повторяют при каждом новом обращении к цели.
Таким образом, в заявляемом устройстве, реализующем заявляемый способ, достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ С ФОРМИРОВАНИЕМ СТРОБА В СВЯЗАННОЙ С ЦЕЛЬЮ СИСТЕМЕ КООРДИНАТ | 2019 |
|
RU2707581C1 |
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ В РЕЖИМЕ АКТИВНОЙ ЛОКАЦИИ ГИДРОАКУСТИЧЕСКОГО ИЛИ РАДИОЛОКАЦИОННОГО КОМПЛЕКСА | 2003 |
|
RU2260197C2 |
| Способ формирования команды на пуск защитного боеприпаса | 2021 |
|
RU2783662C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |

Группа изобретений относится к области радиолокации и может быть использована в обзорных доплеровских радиолокационных станциях при сопровождении траекторий маневрирующих целей. Техническим результатом является повышение устойчивости сопровождения любых типов целей на любых участках их траекторий за счет существенного повышения вероятности корректной привязки к сопровождаемой трассе отметок от цели, движущейся как равномерно прямолинейно, так и интенсивно маневрирующей. В заявленном способе при сопровождении цели в обзорной доплеровской РЛС для коррекции центров стробов по дальности и радиальной скорости относительно их экстраполяции основным трассовым фильтром, а также для вычисления размеров стробов на каждом шаге сопровождения используют результаты автономного сглаживания и экстраполяции измеряемой доплеровской скорости и ускорения, получаемые с помощью специального дополнительного фильтра с полиномиальной моделью первого порядка, который работает параллельно с основным трассовым фильтром, сглаживающим и экстраполирующим дальность и угловые координаты. Заявлено также устройство для осуществления способа. 2 н.п. ф-лы, 1 ил.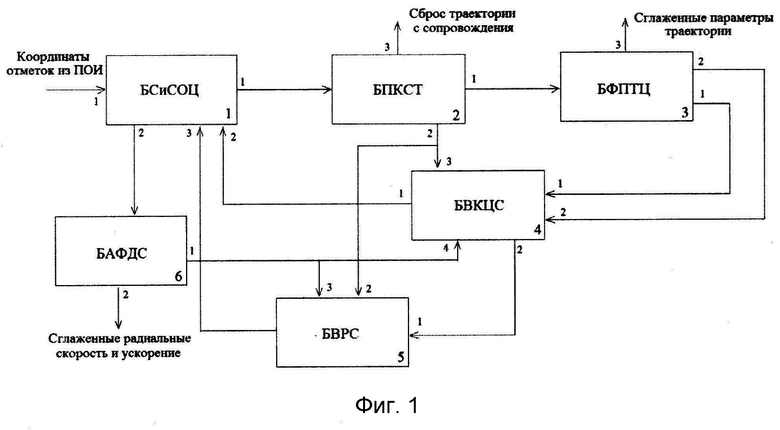
1. Способ сопровождения маневрирующих целей в обзорной доплеровской РЛС, включающий обращение к цели, стробирование и селекцию отметок от цели, проверку выполнения критерия сброса трассы, фильтрацию параметров траектории цели, вычисление скорректированных координат центра строба и его размеров по дальности и скорости, отличающийся тем, что в процессе уточнения координат центра строба по угловым координатам используют следующие выражения:

где  и
и  - экстраполированные на шаг сопровождения n+1 азимут и угол места цели, полученные в основном трассовом фильтре на шаге n; Δβn и Δεn - значения обновляющих процессов по соответствующим углам на шаге n; Sign(Δβn) и Sign(Δεn) - знак обновляющего процесса по соответствующему углу; Δβmin и Δεmin - пороговое значение, при превышении которого срабатывает процедура коррекции центра строба; Δβmax и Δεmax - верхняя граница, которую не может превышать величина коррекции центра строба; в процессе уточнения координат центра строба по дальности и скорости используются выражения, основанные на полиномиальной модели движения цели второго порядка:
- экстраполированные на шаг сопровождения n+1 азимут и угол места цели, полученные в основном трассовом фильтре на шаге n; Δβn и Δεn - значения обновляющих процессов по соответствующим углам на шаге n; Sign(Δβn) и Sign(Δεn) - знак обновляющего процесса по соответствующему углу; Δβmin и Δεmin - пороговое значение, при превышении которого срабатывает процедура коррекции центра строба; Δβmax и Δεmax - верхняя граница, которую не может превышать величина коррекции центра строба; в процессе уточнения координат центра строба по дальности и скорости используются выражения, основанные на полиномиальной модели движения цели второго порядка:


где  и
и  - экстраполированные на шаг сопровождения n+1 дальность и радиальная скорость цели, полученные в основном трассовом фильтре на шаге n;
- экстраполированные на шаг сопровождения n+1 дальность и радиальная скорость цели, полученные в основном трассовом фильтре на шаге n;  - экстраполированное на шаг сопровождения n+1 радиальное ускорение, полученное в автономном фильтре измеряемой доплеровской скорости; ΔTn+1 - интервал времени между n+1 и n шагами сопровождения; при этом размеры стробов по дальности и скорости также определяют на основе кинематической модели движения цели:
- экстраполированное на шаг сопровождения n+1 радиальное ускорение, полученное в автономном фильтре измеряемой доплеровской скорости; ΔTn+1 - интервал времени между n+1 и n шагами сопровождения; при этом размеры стробов по дальности и скорости также определяют на основе кинематической модели движения цели:


где Dпчс и Vrпчс - постоянные части стробов по дальности и скорости, зависящие от точности измерения соответствующего параметра.
2. Устройство для сопровождения маневрирующих целей в обзорной доплеровской РЛС, содержащее блок стробирования и селекции отметок цели, блок проверки критерия сброса траектории, блок фильтрации параметров траектории цели, блок вычисления координат центра строба, блок вычисления размеров строба, при этом первый вход блока стробирования и селекции отметок цели является входом устройства, первый выход блока стробирования и селекции отметок цели соединен со входом блока проверки критерия сброса траектории, первый выход которого соединен со входом блока фильтрации параметров траектории цели, первый и второй выходы которого соединены с первым и вторым входами блока вычисления координат центра строба, соответственно, первый выход блока вычисления координат центра строба соединен со вторым входом блока стробирования и селекции отметок цели, выход блока вычисления размеров строба соединен с третьим входом блока стробирования и селекции отметок цели, третий выход блока проверки критерия сброса траектории и третий выход блока фильтрации параметров траектории цели являются выходами устройства, отличающееся тем, что в него дополнительно введен блок автономной фильтрации доплеровской скорости, при этом второй выход блока вычисления координат центра строба соединен с первым входом блока вычисления размеров строба, второй выход блока проверки критерия сброса траектории соединен со вторым входом блока вычисления размеров строба и третьим входом блока вычисления координат центра строба, второй выход блока стробирования и селекции отметок цели соединен со входом блока автономной фильтрации доплеровской скорости, первый выход которого соединен с четвертым входом блока вычисления координат центра строба и третьим входом блока вычисления размеров строба, второй выход блока автономной фильтрации доплеровской скорости является выходом устройства.
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ С ФОРМИРОВАНИЕМ СТРОБА В СВЯЗАННОЙ С ЦЕЛЬЮ СИСТЕМЕ КООРДИНАТ | 2019 |
|
RU2707581C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2488136C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| US 11435443 B2, 06.09.2022 | |||
| US 4816833 A, 28.03.1989. | |||
