Изобретение относится к области машиностроения, а именно к арматуростроению, и может быть использовано в нефтегазодобывающей нефтехимической, энергетической и других отраслях промышленности.
Современные задачи развития техники связаны с ростом производительности машин, точности воспроизведения сложных законов программного движения рабочих органов. С одной стороны это требует усложнения кинематических схем моделей механизма при учете упруго-диссипативных характеристик. С другой, упрощение машин и механизмов повышает их надежность, ресурс, снижает стоимость производства и обслуживания. Поэтому задача стоит в повышении функциональных свойств простых механизмов в машиностроении.
К таким направлениям следует отнести использование самотормозящихся (СТ) механизмов (СТМ). Достоинства таких устройств очевидны: они компактны, обладают высокой редукцией, не требуют дополнительных тормозных устройств, для удержания нагрузки.
Следует отметить, что теория СТМ достаточно подробно разработана и изложена в трудах российских и советских ученых (АССУРА Л.В. «Исследование плоских стержневых механизмов с низкими парами с точки зрения их структуры и классификации». М., Изд-во АН СССР, 1952; Артоболевский И.И. «Курс теории механизмов и машин. М., Наука, 1988; Вейц В.Л., Гидаспов И.А., Царев Г.В. «Динамика машинных агрегатов с самотормозящимися передачами». Саранск, Изд-во Саранского ун-та, 1989 и других).
Однако интерес к данной теме постоянно растет. Это связано с появлением новых движителей, возрастание требований по скорости и точности позиционирования, прогнозируемости и надежности самоторможения, ресурса и долговечности СТМ. В основном, это связно к специфическим режимам движения: оттормаживание, автоколебания, все это требует процесса исследований, о чем ниже будет отмечено.
Известен узел клиновидной задвижки, содержащий управляемый шпинделем жесткий клин с уплотнительными полями, взаимодействующими с ответными полями двух седел загерметизированных в соосных проходному каналу корпуса расточках посредством врезания ступенчатого выступа в последние с последующей развальцовкой юбок седел относительно корпуса (см. Патент RU №2186277, F16K от 27.07.2002). Также известен затвор клиновой задвижки, содержащий соединенную со шпинделем обойму, охватывающую выступы двух одинаковых дисков с размещений между ними составной пяткой и удерживаемых в обойме буртами верхнего и нижнего держателей, помещенными в кольцевые канавки дисков, уплотнительные поля которых взаимодействуют с ответными полями седел, выполненными с односторонними скосами, закрепленными и загерметизированными в корпусе, при этом угол скоса седел равен половине угла клиновидной обоймы, а пята состоит из двух кольцевых равных по высоте подпятников, охватывающих шар, выполненный из прочного материала (см. Патент RU №2511771, Е16К 3/12 от 10.04.2014). Известен узел затвора клиновидной задвижки, содержащий цельный клин с уплотнительными полями, взаимодействующими с ответными полями загерметизированных и зафиксированных болтами относительно корпуса седел с хвостовиками, сопряженными с корпусом, при этом хвостовики выполнены ступенчатыми, на торце последней ступени, длина которой больше длины сопряженной с ней проточки корпуса, выполнена образованная двумя коническими поверхностями острая грань (см. Патент RU №171255, Е16К 3/12, Е16К 3/30 от 25.05.2016). Известен узел затвор клиновидной задвижки, содержащий управляемый шпинделем цельный клин с уплотнительными полями, взаимодействующими с ответными полями двух седел, загерметизированных в соосных проходному каналу корпуса расточках и зафиксированных ботами относительно последних, при этом фиксирующие болты в корпусе установлены с двух сторон седел, сверху со стороны крышки задвижки и снизу со стороны съемного дна закрывающегося его внутреннюю полость корпуса, при этом противолежащие резьбовые отверстия в корпусе выполнены параллельно вертикальной оси корпуса и смещены от последнего в противоположные стороны (см. Патент RU №2695672, F16K 3/12, Е16К 3/30 от 25.07.2019). Данные узлы имеют самотормозящие механизмы по наклонной плоскости для удержания нагрузок, и, следовательно, им присуще увеличенные трения по времени совершения положительной работы.
Изобретение направлено на взаимодействие тел по плоскости и на повышение эффективности, на самоторможение посредством, которого возможно определить в первичных (простейших) механизмах, в работе которых возникает самоторможение при определении его угла, когда необходимо определение условие коэффициента для случая удержания нагрузки в любом i-ом состоянии самого механизма самоторможения, блокировки, при воздействии определенной силы (F) на обратном ходе, а также позволит повысить качество анализа СТМ, в частности, критерия перехода в область СТ для механизмов различных типов, характеристики внутренней области СТ и др.
Это достигается тем, что в способе механизма взаимодействия тел по плоскости узла затвора клиновидной задвижки, содержащем управляемый шпинделем цельный клин с уплотнительными полями в соосных проходному каналу корпуса расточках и зафиксированный болтами относительно последних, наклонная поверхность самотормозящего механизма в виде цельного клина, взаимодействующая с ответными полями двух седел в направлении внутреннего пространства корпуса задвижки с расположенными под углом скоса седел в данный момент движения по направлению самоторможения клинового механизма устанавливается с коэффициентом запаса по самоторможению и определяется относительным перемещением из условия ψотн=2f/f+tgα, где f - коэффициент трения - по Амонтону; α - угол действия входной силы - угол подъема в радианах, между линией, соединяющей клин, который в данный момент времени двигается в направлении внутренней плоскости корпуса, на которую прижимает тормозное устройство для удержания нагрузки на обратном ходе.
Задвижка с расположенным под углом скоса седел в данный момент движения по самоторможению клинового механизма устанавливается с предложенным коэффициентом запаса по самоторможению.
Данный коэффициент для удержания нагрузки по наклонной плоскости, согласно изобретения, определяет относительное смещение по формуле: ψ=2f/f+tgα, где f - коэффициент трения (по Амонтону); α - угол действия входной силы (угол подъема), содержащей клин, который в данный момент времени двигается в направлении внутренней плоскости корпуса, на которую нажимает тормозное устройство удержания нагрузки на обратном ходе.
Сама сущность предложенного изобретения показывает во сколько раз потенциально возможная сила ее преодоления. Сравнение ведется в приведенных величинах - к плоскости трения в данном случае, где отражен относительный коэффициент трения, показывающий реальную силу трения, и в каком долевом участии эта сила трения может быть.
Пример: ЗСТО равен 0,8. ψ=0,8. Это означает, что потенциально возможная сила трения в данной ситуации задействована на 80%. Размерность - безразмерная ψотн=1. Диапазон значений: зависит в какую сторону относительно идеального равновесия смещено реальное равновесие, а, значит, ψотн в соответствии с этим будет определяться, т.е. всегда положительно, а также все режимы движения.
Для исследования простейших механизмов, основанных на взаимодействии движения тел по плоскости, значение коэффициента трения f в контактирующей поверхности принимается постоянным.
Вместе с тем, следует отметить, что все простейшие механизмы с самоторможением имеют в своей основе взаимодействие звеньев по плоскости. При этом можно выделить три отельные парадигмы, характеризующие механизмы с геометрически наклонной плоскостью: ползун по поверхности, винтовая пара и клин.
Ползун по поверхности. Здесь используются термины поступательная пара (Фролов К.В. Теория механизмов и машин. М., Высшая школа, 1987, с. 230), ползун на поверхности (Артоболевский И.И. Теория механизмов и машин. М., Наука, 1988, с. 220), тело, прижатое к плоскости (Блехман И.И., Блехман Л.И., Васильков В.Б. и др. Об износе оборудования в условиях вибрации и ударных нагрузок. Вестник науч. техн. Развития, 2018, №1, с. 135), наклонная плоскость (Андреев Г.Н., Марков Б.Н., Педь Е.И. Теория механизмов и детали точных приборов. М., Машиностроение, 1987, с. 44, 215) и др. Можно привести также классический вариант ползуна из энциклопедии (Фролов К.В.., ред. Машиностроение. Энциклопедия. Т. 1-2. Теоретическая механика. Термодинамика. Теплообмен. М., Машиностроение, 1999, рис. ).
Для сокращения материла в описании предложенного решения, здесь не приводится известная литература, касающаяся винтовой пары и клина, где описываются, как они выглядят, какой сложности и т.д. Поэтому, следующие приемы: механизм двойного клина; клиновый механизм с малым трением в направляющих и т.д.
Однако во всех случаях, подход теоретически остается один и тот же - ползун по наклонной плоскости.
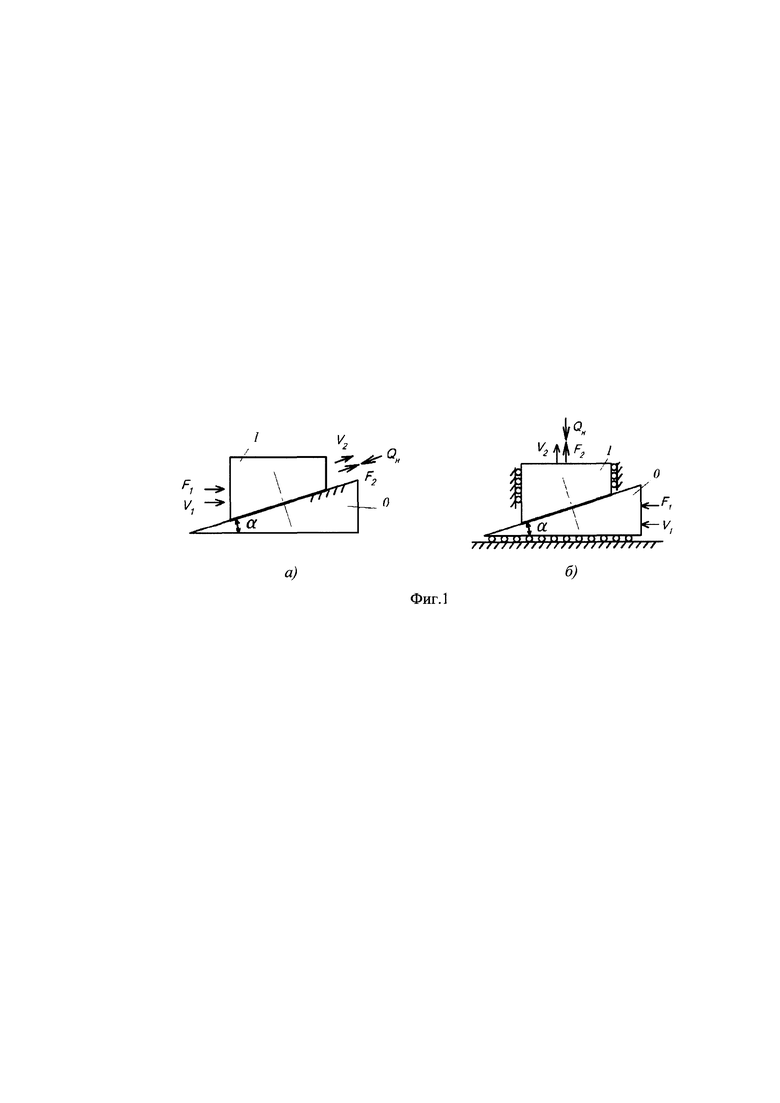
Функциональный анализ. «Клиновый механизм - механизм, звенья которого образуют только поступательные пары …» (фиг. 1. - Левитский Н.И., ред. Теория механизма и машин. Терминология. Буквенные обозначения величин. Вып. 99. М., Наука, 1984, с. 11).
Рассмотрим две схемы. У обеих двух схем имеются только поступательные пары: тело 1 относительно тела 0. Обе являются механизмом по определению. Наличие неподвижного звена (стойки) не исключает схему, приведенную на фиг. 1,а, (механизмы с поступательными кинематическими парами) из класса механизмов, где V1, V2 - скорость звеньев 1 и 2; F1, F2 - входящая и выходящая силы; Qн- сила нагрузки.
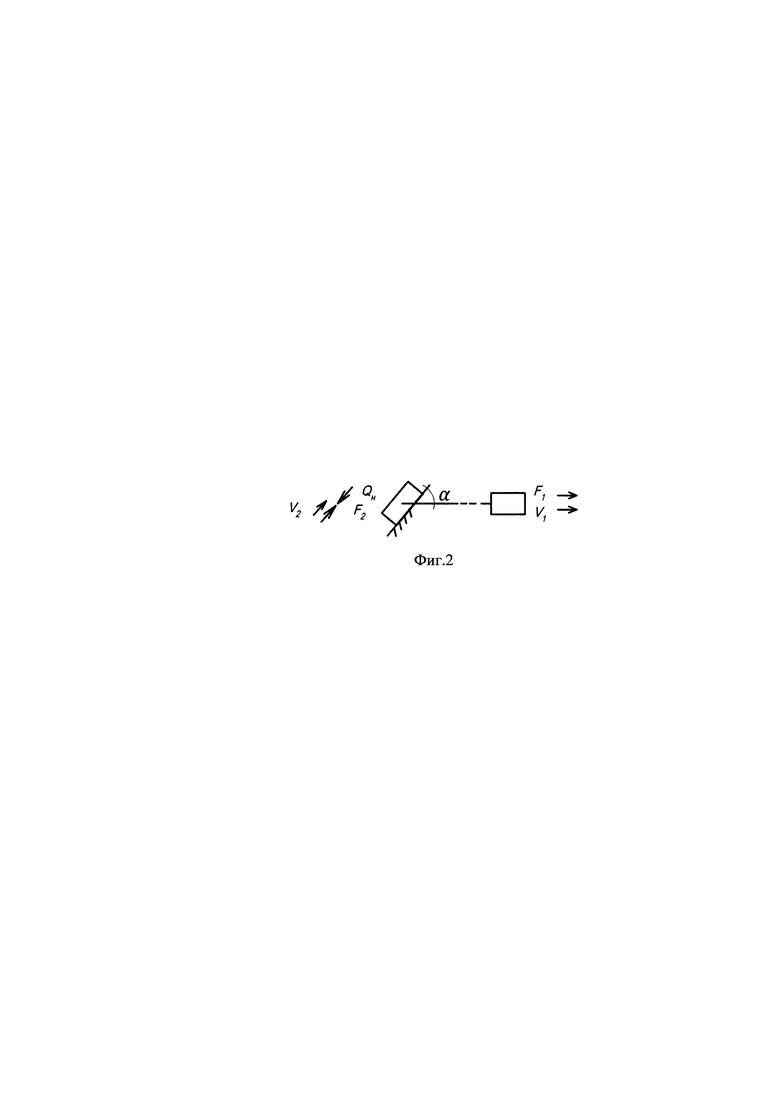
Наличие неподвижного звена (стойки) не исключает схему, приведенную на фиг. 1,а, из класса механизмов. Несложно рассмотреть ее аналог с двумя звеньями (фиг. 2) (двухзвенный механизм).
Приведем сравнительную таблицу функциональных параметров двух рассматриваемых сил механизмов, табл. 1.
Сравнение параметров механизмов (фиг. 2).
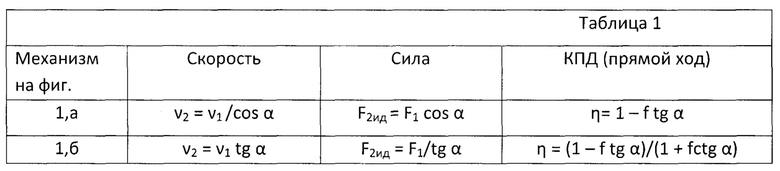
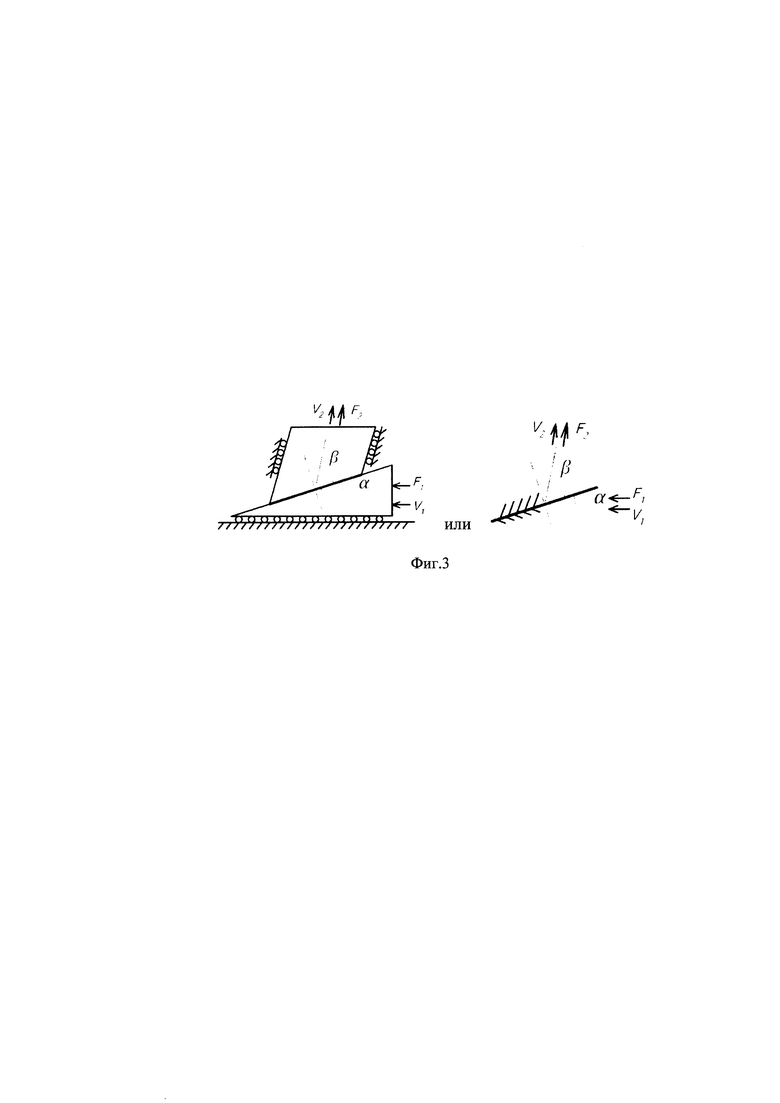
Из таблицы следует, что представлены разные механизмы. Поэтому, отметим, что случай ортогональной передачи движения для схемы (фиг. 1, б) есть частный вариант общего вида, где участвуют два угла α и β (фиг.3) (Клиновидный механизм, общий вид), где α - угол наклона входной силы относительно плоскости контакта звеньев; β - угол наклона выходной силы. Кроме того, можно отметить, что для передачи наклонная плоскость выходная скорость больше входной. Это уже есть мультипликатор.
Для схемы (фиг. 3) для прямого хода будут справедливы следующие формулы: 


Здесь рассматривается случай передачи движения от звена 1 к звену 2 - прямой ход.
Формулы (1) и (3) для случая α+β, преобразуются к каноническому виду
v2=v1tgα, η1, 2=tgα/tg(α+p).
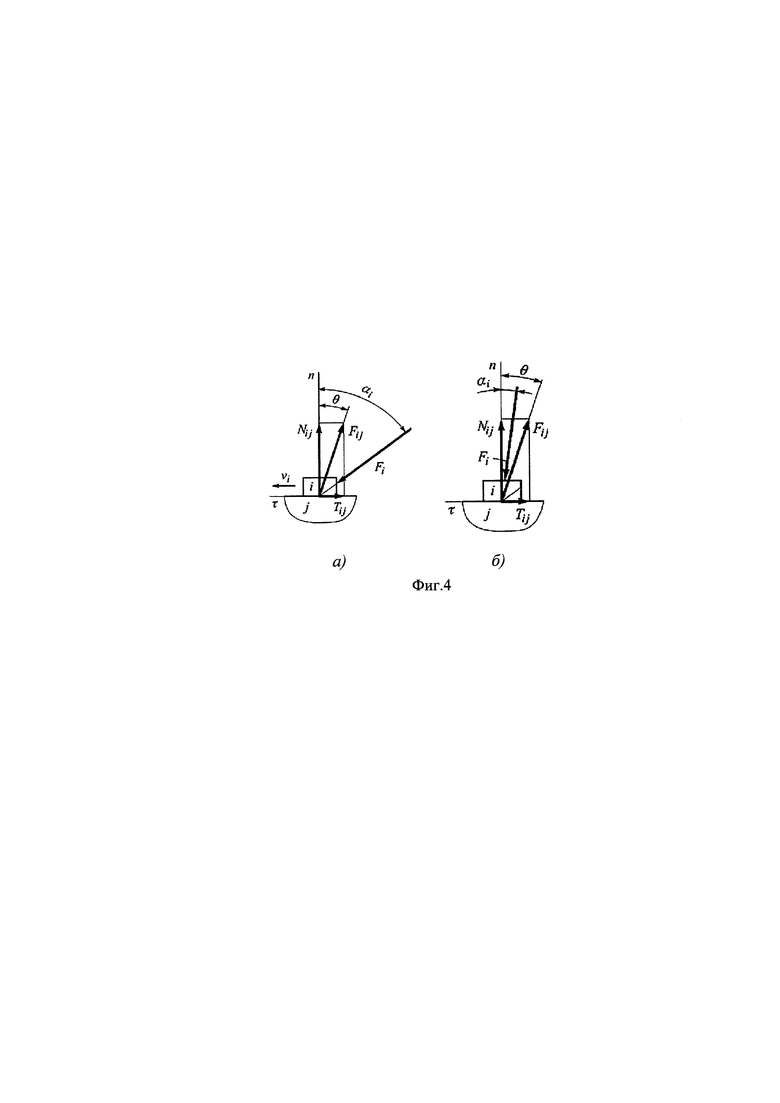
Критерий самоторможения. "Самоторможение присуще поступательным кинетическим парам при расположении движущей силы или на его границах при нулевой начальной скорости» (Тимофеев Г.А., Самойлова М.В., Панюхин В.В. Анализ критериев самоторможения с точки зрения их обоснованности. Вестник МГТУ им. Н.Э. Бауманова. Сер. Машиностроение, 2013, №4, с. 27-42). (фиг. 4) (Схема сил в клиновом механизме), где а - прямой ход, б - обратный ход.
Однако эти схемы (фиг. 4) обозначают другую ситуацию, в отличие от рассматриваемой нами, и эта схема отличается от схемы ползуна по поверхности.
Поэтому следует отметить, что в известной литературе понятие угол трения было ведено применительно к движению ползуна по поверхности - геометрический смысл и является критерием самоторможения. Угол отсчитывается относительно нормали (фиг. 5) (Угол трения как критерий СТ), где а и б - входная сила вне и внутри трения).
Для ортогональных новых механизмов выполняется условие α+β=90°. И под критерием самоторможения на обратном ходу (на прямом ходе самоторможение вообще не рассматривается для этих механизмов) и понимается уже аналитическое условие: «когда угол подъема резьбы меньше угла трения» («… выражение α<р может, служит критерием самоторможения не только для клинового, но также для винтового и червячного механизма» … - Тупаев А.И. Самотормозящие механизмы. М., Машиностроение, 19706, с. 43).
Таким образом, приведенная схема на (фиг. 5) показывает, в каком состоянии механизм находится внутри области самоторможения. Это, в общем, характеризуется количественным и часто называется надежностью (запасом) самоторможения. Определяющим здесь будут оба угла α и β.
Следует отметить, что в клиновом механизме оба звена перемещаются по своим направлениям (которые определены конструктивно).
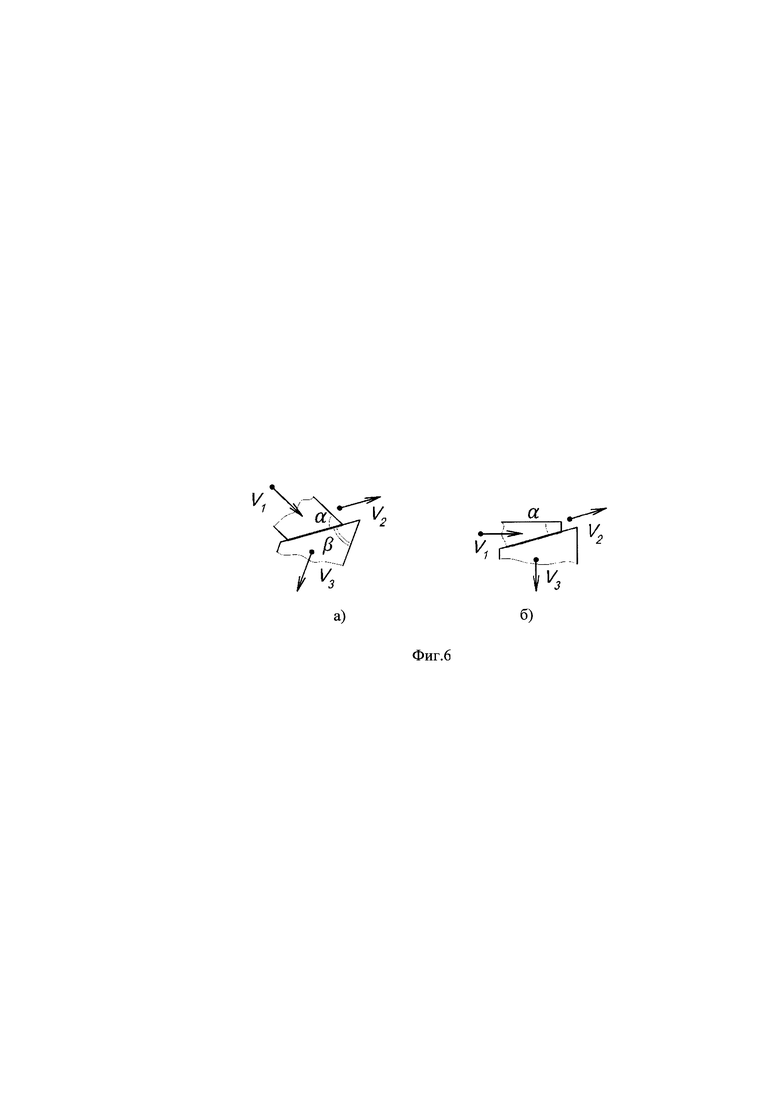
Принципиальным критерием отличия для представленных простейших механизмов является результат выходного движения (фиг. 6) (Варианты преобразования движение), где а - гипотетически возможное выходное движение; б - вариант для механизма наклонная плоскость; в - вариант для клиновой пары.
Отсюда получаем, что:
- у механизма наклонная плоскость - это движение самого ползуна по плоскости (v2); V2 само тело на поверхности (ползун) является носителем выходного движения;
- у дифференциальной клиновой пары - движение v3.
Таким образом, имеются различия их разных свойств в функциональной зависимости и различие критериев самоторможения.
В общем, из всего отмеченного теоретическим путем - они основаны на взаимодействии тел по геометрически наклонной плоскости. Отсюда, передача наклонная плоскость имеет один геометрический параметр, угол α; передача клиновая пара общего вида - два, углы α и β (фиг. 3).
Таким образом, существуют передача наклонная плоскость и клиновидная пара - это разные механизмы.
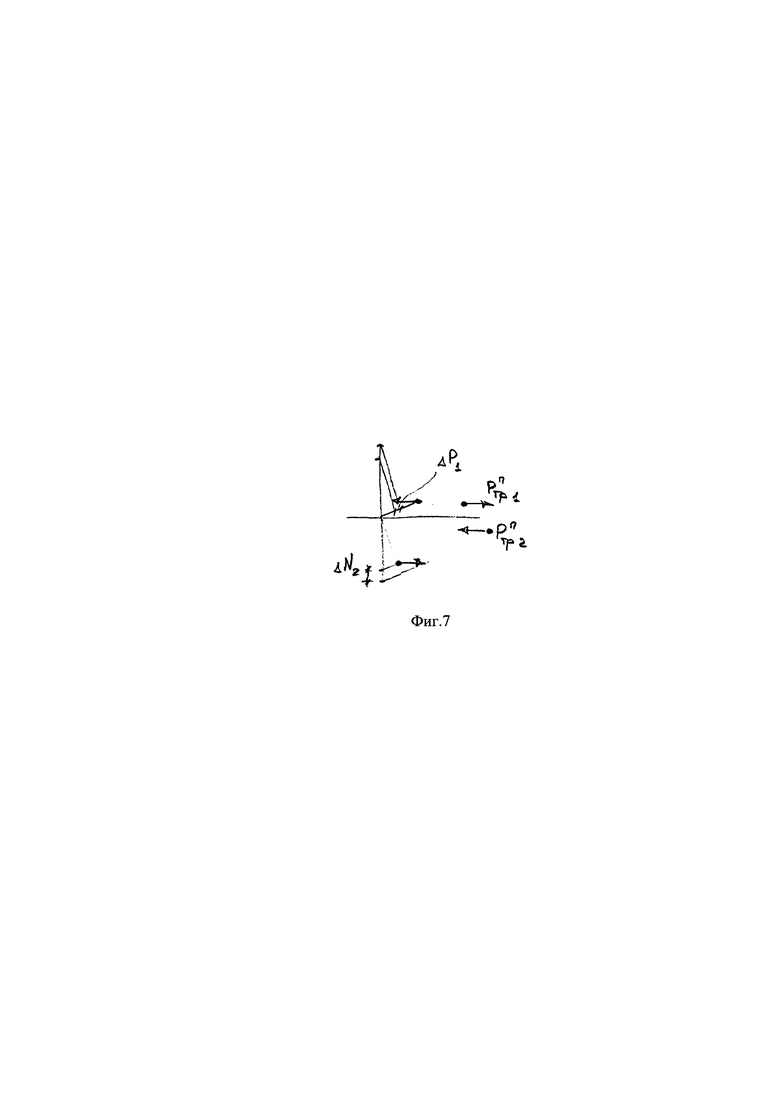
Следовательно, применительно к самотормозящимся передачам для заявителя наибольший интерес (новый) на практике представляет нахождение коэффициента ψотн, для случая «удерживающая нагрузка» («чистого» самоторможения) - сила Р2 в наличии и заперта, сила P1=0 (фиг. 7).
В соответствии с вышеизложенной теоретическим путем, данное является одним из i-иных возможных, и описывается следующим образом, с учетом «Р2 - ведущее» и Р1=0 (фиг. 7), где имеем:
а) Рптр 2 _ насыщена. Первая полупередача, со стороны силы Р2, как уже отмечалось, всегда несамотормозящая;
б) насыщение Рптр 1 (второй по ходу потенциальной силы трения) - отсутствует, так как данная полупередача самотормозящая, а как следствие и передача в целом;
в) тогда:
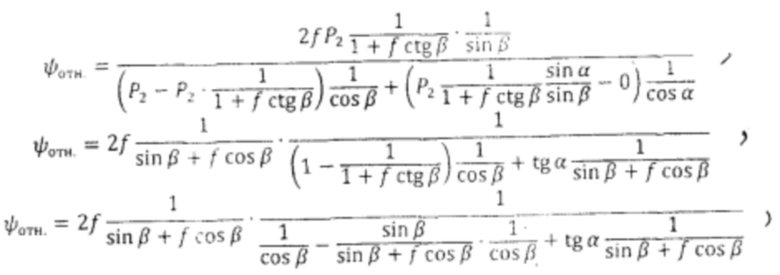
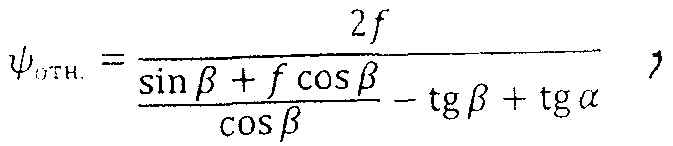
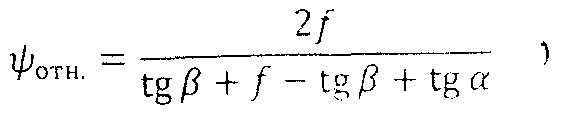
Окончательно устанавливается коэффициент запаса по самоторможению и определяется относительное перемещение из условия
ψотн=2f/f+tgα,
где f - коэффициент трения (по Анонтону); α - угол действия входной силы (угол подъема), в радианах, между линией, соединяющей клин, который в данный момент времени двигается в направлении внутренней плоскости корпуса, на которую нажимает тормозное устройство для удержания нагрузки на обратном ходе.
Таким образом, новым является полученная зависимость для нахождения ЗСТО в любом i-ом состоянии механизма, которая достаточно удобна, для определения удержания нагрузки посредством самоторможения самого механизма, блокировки. Изготовление клиновидной задвижки с определенным углом α создает надежное движение клина на обратном ходе в корпусе и достижение равномерно давления на его стенки на практике.
Краткое описание чертежей.
На фиг. 1 изображены механизмы с поступательными кинематическими парами.
На фиг. 2 изображен двухзвенный механизм.
На фиг. 3 изображен клиновой механизм, общий случай.
На фиг. 4 изображена схема сил в клиновом механизме.
На фиг. 5 изображен угол трения как критерий СТ.
На фиг.6 изображены варианты выходного движения.
На фиг. 7 изображен случай «держания нагрузки» для описания на практике коэффициента относительности.
Изобретение повышает эффективность работы клиновидной задвижки на самоторможение при удержании нагрузки на обратном ходе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАДВИЖКА | 1998 |
|
RU2147095C1 |
| СПОСОБ СИНТЕЗА СВЕРХТВЕРДОГО МАТЕРИАЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2107539C1 |
| Запорный орган клиновой задвижки | 1987 |
|
SU1548570A1 |
| ПРЕССОВАЯ УСТАНОВКА ДЛЯ СИНТЕЗА СВЕРХТВЕРДЫХ МАТЕРИАЛОВ | 1993 |
|
RU2048882C1 |
| Бесклиновой затвор параллельного типа для запорных устройств | 2022 |
|
RU2783741C1 |
| ШАРОВОЙ КРАН С КЛИНОВЫМ ПОДЖАТИЕМ ПЛАВАЮЩИХ СЕДЕЛ К ПРОБКЕ | 2015 |
|
RU2588337C1 |
| Способ контроля размеров сопрягаемых элементов в затворе клиновой задвижки и устройство для его осуществления | 2015 |
|
RU2616347C1 |
| УНИВЕРСАЛЬНЫЙ КЛИНОВОЙ ЗАТВОР | 2002 |
|
RU2238464C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ СТЕРЖНЕВЫХ ОБРАЗЦОВ, НЕ ИМЕЮЩИХ ЗАХВАТНОЙ ЧАСТИ, ПРИ ИСПЫТАНИЯХ НА РАСТЯЖЕНИЕ | 2009 |
|
RU2399034C1 |
| ЗАДВИЖКА КЛИНОВАЯ | 1995 |
|
RU2094682C1 |

Изобретение относится к области машиностроения и может быть использовано в нефтегазодобывающей, нефтехимической, энергетической и других отраслях промышленности. В способе механизма взаимодействия тел по плоскости узла затвора клиновидной задвижки наклонная поверхность самотормозящего механизма устанавливается с коэффициентом запаса по самоторможению и определяется относительным перемещением из условия ψотн=2f/f+tgα, где f - коэффициент трения - по Амонтону; α - угол действия входной силы - угол подъема в радианах, между линией, соединяющей клин, который в данный момент времени двигается в направлении внутренней плоскости корпуса, на которую прижимает тормозное устройство для удержания нагрузки на обратном ходе. Технический результат - повышение эффективности работы клиновидной задвижки на самоторможение при удержании нагрузки на обратном ходе. 12 ил., 1 табл.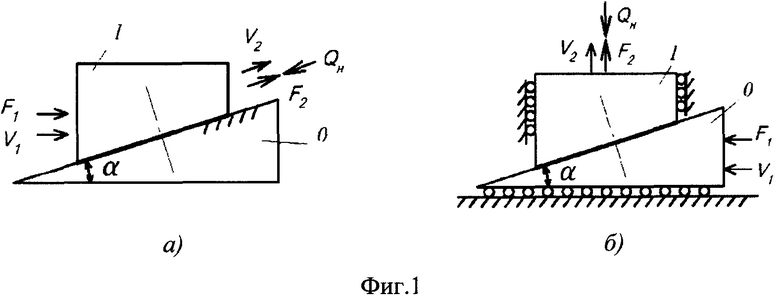
Способ механизма взаимодействия тел по плоскости узла затвора клиновидной задвижки, содержащий управляемый шпинделем цельный клин с уплотнительными полями в соосных проходному каналу корпуса расточках и зафиксированный болтами относительно последних, отличающийся тем, что наклонная поверхность самотормозящего механизма в виде цельного клина, взаимодействующая с ответными полями двух седел в направлении внутреннего пространства корпуса задвижки с расположенными под углом скоса седел в данный момент движения по направлению самоторможения клинового механизма, устанавливается с коэффициентом запаса по самоторможению и определяется относительным перемещением из условия ψотн=2f/f+tgα, где f - коэффициент трения - по Амонтону; α - угол действия входной силы - угол подъема в радианах, между линией, соединяющей клин, который в данный момент времени двигается в направлении внутренней плоскости корпуса, на которую прижимает тормозное устройство для удержания нагрузки на обратном ходе.
| Узел затвора клиновой задвижки | 2018 |
|
RU2695672C1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ «РЫБА В МАСЛЕ» | 0 |
|
SU171255A1 |
| ЗАТВОР КЛИНОВОЙ ЗАДВИЖКИ | 2012 |
|
RU2511771C2 |
| КЛИНОВАЯ ЗАДВИЖКА И СПОСОБ ГЕРМЕТИЗАЦИИ КЛИНОВОЙ ЗАДВИЖКИ | 2000 |
|
RU2186277C2 |
| US 4441688 A1, 10.04.1984 | |||
| Коньки с поворотной опорной плитой | 1950 |
|
SU88144A1 |
| СПОСОБ РЕКОНСТРУКЦИИ ПЛЕЧА У ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ТРАВМЫ | 2003 |
|
RU2266069C2 |

