Настоящее изобретение относится к роботизированной снегоуборочной технике и может быть использовано для уборки снега с улиц, с пешеходных дорожек и тротуаров, а также для уборки любого другого мусора, например, листьев деревьев, в осеннее время.
Известна система беспроводного управления снегоочистителем [1], содержащая транспортное средство и блок управления транспортным средством, состоящий из компьютера, блока памяти и приемопередатчика.
Система беспроводного управления снегоочистителем в этом изобретении устанавливается на транспортном средстве и содержит пульт дистанционного управления, модуль управления плугом, установленный на снегоочистителе и содержащий соответствующий приемопередатчик; модуль управления транспортным средством, установленный на транспортном средстве и включающий в себя соответствующий приемопередатчик, который осуществляет беспроводную связь с приемопередатчиком модуля управления плугом.
Недостаток данного устройства заключается в необходимости работы оператора, малой маневренности.
Известен робот-снегоуборщик [2] на основе автономного робототехнического устройства, установленного на самоходную колесную машину, содержащий блок управления, включающий в свой состав компьютер (центральный процессор), запоминающее устройство и приемно-передающее устройство, а также связанные с компьютером блок управления, датчик близости и устройство тревожной сигнализации.
Данное автономное робототехническое устройство содержит также шасси; множество колес, установленных на шасси; систему привода, установленную на шасси и функционально связанную с множеством колес; модуль управления, функционально связанный с системой привода; модуль обнаружения осадков, содержащий датчик уровня накопления, выполненный с возможностью генерировать и передавать в модуль управления первый сигнал при обнаружении предварительно определенного начального уровня накопления; и модуль управления, выполненный с возможностью активировать автономное робототехническое устройство для выполнения первого экземпляра рабочей процедуры после приема первого сигнала.
Недостатками данного устройства являются:
- отсутствие возможности объезда препятствия при его обнаружении датчиком близости, то есть при наличии препятствия известный робот-снегоочиститель просто останавливается и прекращает работу;
- для определения местоположения и ориентации робота-снегоуборщика используется спутниковая навигация, реализованная в виде отдельного блока (LOI), содержащего GPS-датчик, компас и акселерометр. Однако спутниковой навигации присущи характерные недостатки. Самым явным недостатком использования любой такой системы является то, что до приемника при определенных условиях сигнал может и не доходить либо приходить, но со значительными задержками или искажениями. Большая облачность, характерная для снегопада, также может ухудшать прием сигнала со спутников. Сигнал GPS могут также исказить помехи, возникающие в результате магнитных бурь, или помехи от наземных источников радиосигнала. Все это влияет на точность движения робота-снегоуборщика, а также на надежность и качество его работы.
Известна система и способ для ведения автоматического очистительного устройства по траектории [3]. Устройство содержит базовую станцию, включающую в себя передатчик с возможностью передачи направляющего сигнала в область приема направляющего сигнала, пространственно ограниченную посредством по меньшей мере одного граничного участка; мобильного робота, включающего в себя приводную систему, выполненную с возможностью перемещения этого робота по полу; два расположенных по соседству друг от друга датчика направляющего сигнала, каждый из которых выполнен с возможностью генерации опорного сигнала, который отражает прием этим датчиком этого направляющего сигнала; и контроллер, который оперативно подключается к этой приводной системе и этим датчикам направляющего сигнала, и выполнен с возможностью управления этой приводной системой для перемещения этого робота вдоль этого по меньшей мере одного граничного участка этой области приема направляющего сигнала.
Недостатками данной системы является малая мобильность робота, ограниченность его работы наперед заданным участком, невозможность реагирования на изменение обстановки.
Наиболее близким аналогом к данной полезной модели является робот-снегоуборщик [4], состоящий из самоходной колесной машины, содержащий блок управления, включающий в свой состав компьютер с внутренней памятью, к которому подключены датчик близости, устройство тревожной сигнализации и приемно-передающее устройство.
Недостатком данного изобретения является низкая маневренность и необходимость использования базовых приемно-передающих устройств, располагаемых по периметру обрабатываемого участка, обеспечивающих связь по соответствующим радиоканалам с приемно-передающим устройством блока управления.
Целью данного изобретения ли является улучшение маневренности робота-снегоуборщика и обеспечение автономной работы робота-снегоуборщика круглосуточно, в любой местности, при любых метеоусловиях и изменениях рельефа местности или появления препятствий.
Поставленная задача решается тем, что автономная мобильная робототехническая платформа для очистки снега, состоящая из самоходной колесной машины, на которой размещен аккумулятор, ходовые двигатели и ковш, содержащая блок управления, компьютер с внутренней памятью, к которому подключены ультразвуковой локационный датчик, видеокамеры, энкодеры, герконы, имеющая систему подзарядки, систему компьютерного зрения, инфракрасные датчики, микроконтроллеры, оснащена 9 автономными двигателями, имеется программно-электронная система распознавания образов, максимальный угол разворота каждого из четырех колес составляет 130 градусов.
Данное изобретение позволит автоматизировать уборку снега на небольших площадках, парковках, тротуарах города и дорожках общего пользования при умеренных снегопадах. Устройство может быть применено для уборки от снега территории многоквартирных или частных домов. Малые размеры мобильной автономной робототехнической платформы позволят использовать ее на территориях со сложной геометрией территории, где применение снегоуборочных машин экономически невыгодно.
Автономная мобильная робототехническая платформа способна выполнять поставленную задачу в ручном и беспилотном режиме без непосредственного контроля человеком за работой. Устройство оборудовано необходимыми датчиками и видеокамерами, что позволит выполнять задачи по уборке снега (или листьев) в ночное и дневное время в помещениях или на открытом пространстве. Очистка снега может производиться до 3-х часов, после чего робототехническая платформа будет автоматически подзаряжаться и продолжит выполнять поставленную задачу. Экономическая и социальная эффективность устройства заключается в повышении эффективности и качестве выполняемых работ по уборке снега за счет автоматизации и системы распознавания образов.
Задача изобретения заключается в возможности уборки снега с использованием полноприводного малого автоматизированного колесного робота при помощи фронтального ковша.
Технический результат, который достигается при помощи изобретения, заключается в возможности автоматизации уборки снега для небольших территорий или площадок города. Пакетом программного обеспечения полезной модели осуществляется поддержка беспилотного режима работы устройства через сеть Wi-Fi. Автоматизация работы робота будет осуществлена на принципе компьютерного зрения/машинного обучения, что позволит автономной мобильной робототехнической платформе с помощью видеокамеры и датчиков ориентироваться на местности по специальным меткам или знакам и контролю расстояний до ближайших препятствий. Механизмы робота имеют электрические приводы и поэтому работают практически бесшумно. Уборка снега по мере его выпадения позволяет избежать смерзания снега и, как результат, позволит с меньшими усилиями добиться очистки территории.
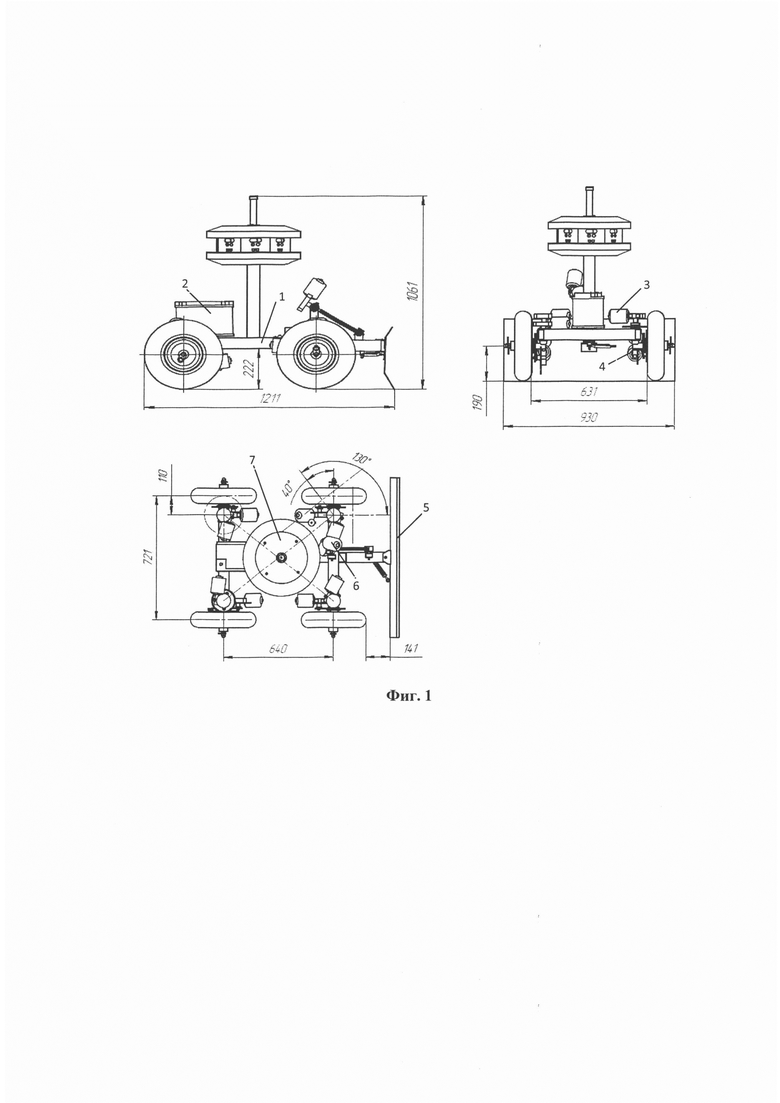
Строение предлагаемого устройства поясняется на фиг. 1, на котором изображено шасси электромеханическое, габаритный чертеж автономной мобильной робототехнической платформы для очистки снега. Данное изобретение состоит из механико-электрической и программно-электронной составляющих.
В механико-электрическую часть изобретения включена опорная рама (1), на которую установлен аккумулятор (2), поворотные (3) и ходовые двигатели (4) и ковш (5). В качестве поворотных и ходовых двигателей используются мотор-редукторы стеклоочистителя ВАЗ-2108. Технические характеристики мотор-редуктора: номинальное напряжение - 12 В, номинальная мощность - 10 Вт, максимальный ток - 3.5-5.0 А, номинальная частота вращения - от 30-40 мин-1 до 55-70 мин-1. Всего в конструкции используется 9 двигателей: по два двигателя на каждую из четырех сторон робототехнической платформы и один двигатель (ДК) для подъема и опускания ковша (6).
Общая высота платформы составила 1,06 м, габаритная длина вместе с ковшом составляет 1,21 м, габаритная ширина платформы определяется шириной ковша и равна 0,93 м. Угол разворота каждого из четырех колес составляет 130°, что позволит эффективно управлять конструкцией на местности и проходить препятствия с малым радиусом поворота.
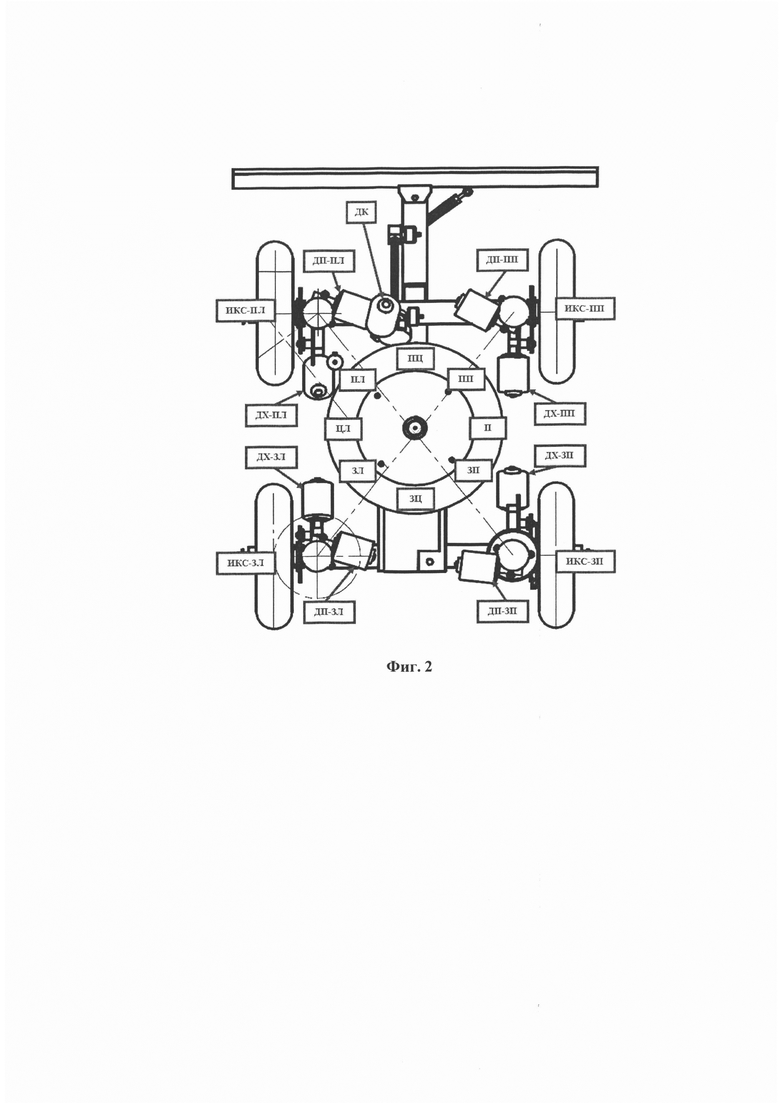
На фиг. 2 представлена схема расположения датчиков и детектирующих элементов движения на роботизированной автономной робототехнической платформе. На данной схеме приведены: передние двигатели поворотные (3) и ходовые (4): (ДХ-ПЛ, ДП-ПЛ, ДХ-ПП, ДП-ПП); задние двигатели поворотные (3) и ходовые (4): (ДХ-ЗЛ, ДП-ЗЛ, ДХ-ЗП, ДП-ЗП) и двигатель ковша (ДК). Маркировкой (ПЦ, ПП, П, ЗП, ЗЦ, ЗЛ, ЦЛ, ПЛ) приведено место расположения датчиков, для регистрации объектов на расстоянии от 1 метра от роботизированной платформы. Здесь расположены 8 ультразвуковых датчиков, и 4 дальних инфракрасных датчика Sharp GP2Y0A710K0F (1 - 5.5 м). Маркировкой (ИКС-ПЛ, ИКС-ПП, ИКС-ЗЛ, ИКС-ЗП) приведены инфракрасные датчики средней дальности Sharp GP2Y0A02YK0F (20-150 см), которые установлены на оси роботизированной автономной робототехнической платформы, что позволит регистрировать препятствия малой высоты, расположенные от снегоуборщика на расстоянии от 20 до 150 см.
Программно-электронная часть включает в себя системы распознавания образов и ввода-вывода информации. На фиг. 3 представлена общая схема расположения базовых элементов программно-электронной части роботизированной платформы. Основным модулем здесь является компьютер или головной модуль (7). Мощность компьютера должна быть достаточной, чтобы обрабатывать информацию с датчиков, а также проводить анализ видеопотока, который будет поступать с установленных видеокамер. Для этой цели используется промышленный миникомпьютер Intel Core 17 В13 i7 7500U с частого процессора - 2.3 ГГц, объемом памяти - 16 Гб и объемом жесткого диска - 512 ГБ, что позволит работать с большими объемами данных. К компьютеру подключены два микроконтроллера STM32F4 Discovery, которые будут обеспечивать контроль за работу двигателей, анализировать данные, поступающие с датчиков. Каждый микроконтроллер STM32F4 Discovery отвечает за работу со своей группой датчиков.
На первый микроконтроллер STM32F4 Discovery будет поступать напряжение с аккумуляторной батареи. Данный микроконтроллер отвечает за работу передних (правых/левых) ходовых и поворотных колес робототехнической платформы. Контроль работы 4-х двигателей осуществляется через два двухканального драйвера Pololu Dual VNH5019 Motor Driver и еще один драйвер будет использовать для контроля работы ковша. Кроме того, осуществляется обработка данных с 4-х энкодеров, отвечающих за расчет скорости/частоты вращения передних ходовых и поворотных двигателей (ЭХ-ПЛ, ЭП-ПЛ, ЭХ-ПП, ЭП-ПП), с 4-х ультразвуковых датчиков (УЗ-ПЦ, УЗ-ЗЦ УЗ-ЦЛ, УЗ-ЦП), с 4-х дальних инфракрасных датчиков (ИКД-ПЦ, ИКД-ЗЦ, ИКД-ЦЛ, ИКД-ЦП) и 2-х инфракрасных датчиков средней дальности (ИКС-ПЛ, ИКС-ПП).
Второй микроконтроллер STM32F4 Discovery отвечает за работу задних (правых/левых) ходовых и поворотных колес робототехнической платформы. Контроль работы 4-х двигателей осуществляется через два двухканального драйвера Pololu Dual VNH5019. На микроконтроллере осуществляется обработка данных с 4-х энкодеров, отвечающих за расчет скорости/частоты вращения задних ходовых и поворотных двигателей (ЭХ-ЗЛ, ЭП-ЗЛ, ЭХ-ЗП, ЭП-ЗП), с 4-х ультразвуковых датчиков (УЗ-ПЛ, У3-ПП УЗ-ЗЛ, УЗ-ЗП), с 4-х дальних инфракрасных датчиков (ИКД-ПЛ, ИКД-ПП, ИКД-ЗЛ, ИКД-ЗП) и 2-х средних инфракрасных датчика (ИКС-ПЛ, ИКС-ПП).
Для регистрации крайнего положения колес, при поворотах вправо/влево, используются концевые датчики (герконы), обозначенные на схеме К1 и К2. Концевой датчик установлен и на ковше, для регистрации крайнего верхнего и крайнего нижнего расположения ковша. За обработку информации, поступающей с передних (правых/левых) концевых датчиков (КД-ПЛ, КД-ПП) и концевых датчиков ковша (КД-КП, КД-КО) отвечает первый микроконтроллер STM32F4 Discovery. За обработку информации, поступающей с задних (правых/левых) концевых датчиков (КД-ЗЛ, КД-ЗП) отвечает второй микроконтроллер STM32F4 Discovery.
| название | год | авторы | номер документа |
|---|---|---|---|
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| РОБОТ-СНЕГОУБОРЩИК | 2015 |
|
RU2636402C2 |
| Способ управления движением наземного роботизированного комплекса для садоводства вдоль линии посадки деревьев | 2023 |
|
RU2808316C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |

Изобретение относится к роботизированной снегоуборочной технике и может быть использовано для уборки снега с улиц, с пешеходных дорожек и тротуаров, а также для уборки любого другого мусора, например листьев деревьев, в осеннее время. Автономная мобильная робототехническая платформа для очистки снега состоит из самоходной колесной машины, на которой размещен аккумулятор, ходовые двигатели и ковш. Платформа содержит блок управления, компьютер с внутренней памятью, к которому подключены ультразвуковой локационный датчик, видеокамеры, энкодеры, герконы, и имеет систему подзарядки, систему компьютерного зрения, инфракрасные датчики и микроконтроллеры. В робототехнической платформе имеется 9 автономных двигателей, программно-электронная система распознавания образов. При этом колеса устройства работают в автономном режиме, а максимальный угол разворота каждого из четырех колес составляет 130 градусов. Изобретение обеспечивает улучшение маневренности робота-снегоуборщика и его автономную работу круглосуточно, в любой местности, при любых метеоусловиях и изменениях рельефа местности или появлении препятствий. 3 ил.
Автономная мобильная робототехническая платформа для очистки снега, состоящая из самоходной колесной машины, на которой размещен аккумулятор, ходовые двигатели и ковш, содержащая блок управления, компьютер с внутренней памятью, к которому подключены ультразвуковой локационный датчик, видеокамеры, энкодеры, герконы, имеющая систему подзарядки, систему компьютерного зрения, инфракрасные датчики, микроконтроллеры, отличающаяся тем, что имеется 9 автономных двигателей, программно-электронная система распознавания образов, колеса устройства работают в автономном режиме, максимальный угол разворота каждого из четырех колес составляет 130 градусов.
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| 0 |
|
SU155756A1 | |
| WO 1993008067 A1, 29.04.1993 | |||
| KR 1020130009305 A, 23.01.2013 | |||
| EP 3412833 A1, 12.12.2018 | |||
| US 4573548 A1, 04.03.1986 | |||
| РОБОТ-СНЕГОУБОРЩИК | 2015 |
|
RU2636402C2 |

