Заявленное изобретение относится к самодвижущимся платформам робототехнических комплексов и может быть использовано для ремонта техники в полевых условиях в составе мобильного роботизированного ремонтно-диагностического комплекса (МРРДК) (RU 2780079 С1 от 26.02.22) и выполнять функции по автоматизированной доставке отдельных узлов, агрегатов и деталей с объекта вооружения (ОВ) на пункт диагностики, для диагностирования неисправности, на пункт ремонта, для проведения их ремонта, а также для доставки отремонтированных узлов, агрегатов и деталей к ОВ.
Известно изобретение автономная мобильная робототехническая платформа для очистки снега (RU 2730666 С1 от 24.08.2020), состоящее из самоходной колесной машины, на которой размещен аккумулятор, ходовые двигатели и ковш. Платформа содержит блок управления, который включает промышленный компьютер, к которому осуществляется подключение видеокамер, микроконтроллеров, к которым подключены датчики расстояний, датчики регистрации угла поворота колес. Устройство имеет систему автоматической подзарядки батареи, систему компьютерного зрения. Устройство способно осуществлять работу в автономном режиме. В робототехнической платформе имеется 9 двигателей, из которых 4 двигателя являются ходовыми, 4 двигателя являются поворотными и один двигатель установлен для регулировки ковшом робота-снегоочистителя. Максимальный угол разворота каждого из четырех колес автономной мобильной робототехнической платформы составляет 130 градусов. Изобретение обеспечивает улучшение маневренности робота-снегоуборщика и его автономную работу круглосуточно при любых метеоусловиях. Система беспроводного управления снегоочистителем в этом изобретении устанавливается на транспортном средстве и содержит пульт дистанционного управления, модуль управления ковшом, установленный на снегоочистителе и содержащий соответствующий приемопередатчик.
Недостатком данного устройства является ограниченность функционала в числе решаемых задач, так как устройство рассчитано только на уборку территории от снега и листвы.
Известно мобильное робототехническое устройство для ремонта техники в полевых условиях (RU 204398 U1 от 24.05.21). Оно в частности может быть использовано для ремонта техники в полевых условиях в составе передвижного ремонтного комплекса или передвижной ремонтной мастерской и выполнять функции по разборке техники для дальнейшего ее ремонта, ремонта ее отдельных узлов, агрегатов и деталей, а также для сборки техники после окончания проведения ремонта. Недостатками, данного технического решения, являются объемные габариты устройства, не позволяющие использовать его в составе МРРДК, отсутствие средств цифровой радиосвязи, обеспечивающий защищенный информационный обмен с другими робототехническими системами и пунктом управления. Также данное техническое решение не обладает достаточной маневренностью для работы в ограниченном пространстве с препятствиями. Как следствие, данное техническое решение не может использоваться в составе организованных групп транспортных роботов функционирующих на выделенной территории МРРДК со спонтанно возникающими помехами движению.
Наиболее близким является изобретение «Базовая платформа интеллектуального робототехнического комплекса (АИРТК)» (RU 2764910 С1 от 24.01.2022), принятое за прототип. Данное устройство содержит корпус на четырех колесах, аккумуляторные батареи, модуль управления аккумуляторной батареей, инфракрасные и ультразвуковые датчики расстояний, датчики окружающей среды, концевые датчики, вычислительный графический модуль, к которому осуществляется подключение видеокамер, главный блок управления. Главный блок управления включает промышленный компьютер, GPS-приемник, автопилот управления, лидар, камеру глубины и поддерживает подключение микроконтроллеров. Главный блок управления снабжен базой данных изображений препятствий, алгоритмом распознавания изображений, построения карты местности, алгоритмом выбора оптимальной траектории. Платформа позволяет осуществлять перевозку документов в офисах, сопровождать посетителей в гостиницах и отелях, осуществлять перевозку грузов в аэропортах, вокзалах и складских помещениях, а также использоваться для запуска малогабаритных беспилотных летательных аппаратов.
Недостатками, данного технического решения, являются маленькая грузоподъемность (не более 20 кг.), ограниченная площадь работы (30 кв.м.). Отсутствие датчика определения собственных координат местоположения по сигналам спутниковой навигации в режиме одометрической навигации и в комплексированном режиме и датчика определение углового положения в пространстве. Отсутствие видеокамеры кругового обзора. Отсутствие узла цифровой радиосвязи с системой псевдослучайной перестройки рабочей частоты (ППРЧ), для передачи данных по цифровому радиоканалу о состоянии изделия, прием по цифровому радиоканалу команд управления от пункта дистанционного управления, передачу по радиоканалу маскированного телевизионного сигнала от видеокамеры. Отсутствие грузовой платформы с такелажным оборудованием для фиксации перевозимого груза.
Задача, на решение которой направлено предложенное изобретение, заключается в создании компактного мобильного роботизированного транспортного устройства (РТУ), перевозимого в контейнерах МРРДК, позволяющего выполнять функции по автоматизированной доставке отдельных узлов, агрегатов и деталей с объекта вооружения (ОВ) на пункт диагностики и на пункт ремонта, для проведения диагностики и ремонта, а также для доставки отремонтированных узлов, агрегатов и деталей к ОВ в труднодоступных местах, в неблагоприятных климатических условиях, в условиях радиационного заражения местности и в условиях ограниченного количества имеющихся людских ресурсов.
Данная задача решается за счет того, что РТУ, перевозимое в контейнерах МРРДК, содержащее корпус, аккумуляторные батареи, контроллер аккумуляторных батарей, четыре мотор-колеса, модули управления мотор-колесами, вычислительный графический модуль для работы с изображениями, камеру глубины, главный блок управления с компьютером и автопилотом, лазерный дальномер, датчики расстояний, датчики состояния окружающей среды, бампер, внутри которого установлены концевые выключатели, отличающееся тем, что роботизированное транспортное устройство для МРРДК малогабаритно, въезжает в проем двери контейнера, имеет грузоподъемность до 100 кг., и состоит из двух модулей базового и грузового, при этом базовый модуль содержит несущий корпус, изготовленный из пространственной рамы, выполненной в виде сборной конструкции из труб и металлических гнутых профилей, и боковых облицовочных панелей, активное приводное шасси, выполненное в виде четырех независимых мотор-колес, главный блок управления, который содержит промышленный компьютер, к которому подключены камера кругового обзора, датчик определения собственных координат местоположения по сигналам спутниковой навигации в режиме одометрической навигации и в комплексированном режиме, датчик определение углового положения в пространстве, герконы, сенсоры, узел цифровой радиосвязи с системой псевдослучайной перестройки рабочей частоты (ППРЧ), а грузовой модуль содержит грузовую платформу с откидными бортами, выполненную из алюминиевого штампованного листа с резиновым противоскользящим покрытием и такелажное оборудование для фиксации перевозимого груза.
Технический результат, который достигается при помощи предлагаемого изобретения, заключается в создании компактного мобильного роботизированного транспортного устройства (РТУ), перевозимого в контейнерах МРРДК, позволяющего выполнять функции по автоматизированной доставке отдельных узлов, агрегатов и деталей с объекта вооружения (ОВ) на пункт диагностики и на пункт ремонта, для проведения диагностики и ремонта, а также для доставки отремонтированных узлов, агрегатов и деталей к ОВ в труднодоступных местах, в неблагоприятных климатических условиях, в условиях радиационного заражения местности и в условиях ограниченного количества имеющихся людских ресурсов.
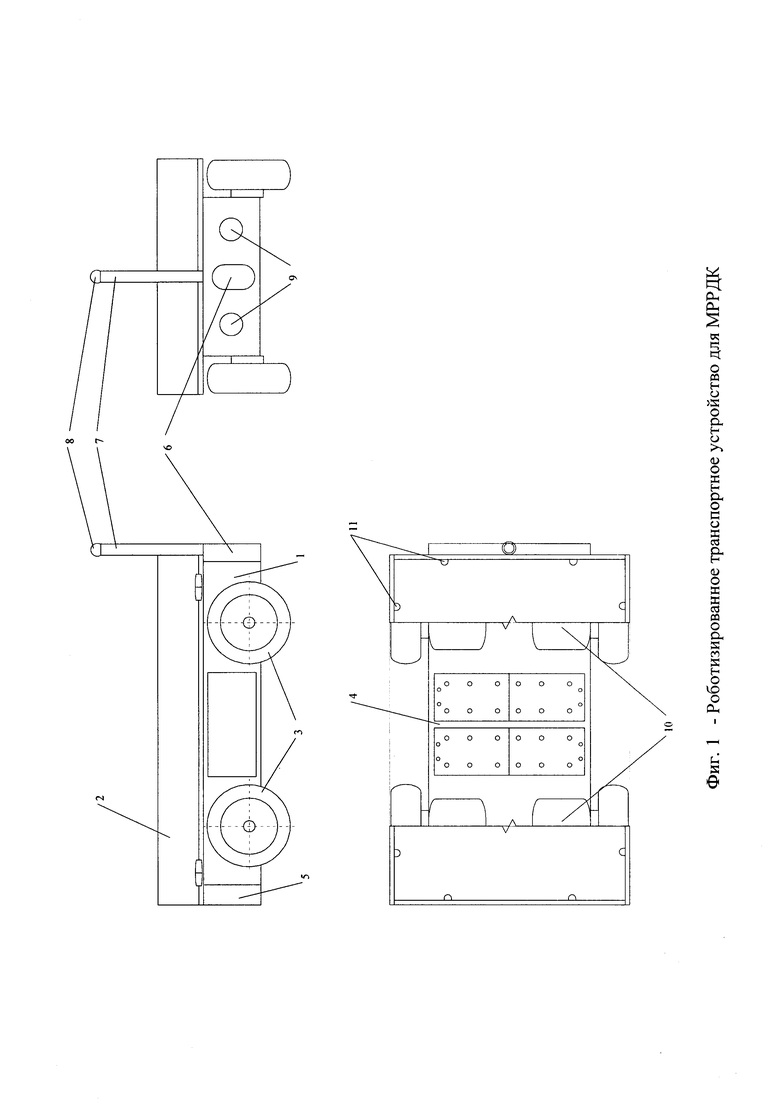
Сущность предлагаемого устройства поясняется фиг.1, на которой схематично изображена ее конструкция. РТУ состоит из двух модулей: базового и грузового. Базовый модуль включает в себя:
Несущий корпус (1) изготовленный из пространственной рамы, выполненной в виде сборной конструкции из труб и металлических гнутых профилей и боковых облицовочных панелей.
Активное приводное шасси (3) состоящее из четырех независимых мотор-колес (10). Управление ходовыми двигателями (мотор-колесами) осуществляется с помощью модулей управления колесами независимо. Колесная формула базового модуля 4x4. В изобретении выбран тип однобортного управления мотор-колесами базового модуля, такое управление называется «танковый ход», так как зачастую применяется при конструировании танков. В ходовой части этого типа, мотор-колеса на правой стороне и мотор-колеса на левой стороне приводятся в действие отдельно. Эти колеса фиксируются в положении «вперед/назад», и их рулевое управление не осуществляется. Управление поворота базового модуля обеспечивается за счет изменения скорости вращения каждой из сторон привода. Ходовая часть этого типа может выполнять поворот нулевого радиуса, когда робот поворачивается на месте, не продвигаясь при этом вперед. При выполнении поворота нулевого радиуса, точка поворота находится в центре робота.
Блок аккумуляторных батарей (4) выполнен в виде двух отсеков и расположен в середине несущего корпуса, для повышения устойчивости и маневренности конструкции, за счет распределения массы аккумуляторных батарей по несущему корпусу.
Блок управления с запоминающим устройством (5) включает промышленный компьютер, спутниковую навигацию, автопилот управления, лидар и камеру глубины с системой сенсоров и герконов. Блок управления снабжен базой данных изображений препятствий, алгоритмом распознавания изображений, построения карты местности, алгоритмом выбора оптимальной траектории с системой сенсоров и герконов.
Узел цифровой радиосвязи с системой ППРЧ (6) осуществляет передачу данных по цифровому радиоканалу о состоянии изделия и прием команд управления от пункта дистанционного управления, передачу по радиоканалу маскированного телевизионного сигнала от видеокамеры.
Штанга для крепления антенны и видеокамеры (7).
Видеокамера кругового обзора (8) для наблюдения оператором за выполнением работ и ручным управлением устройством.
Приборов головного освещения и сигнализации (9).
Грузовой модуль включает в себя:
Грузовую платформу (2) выполненную из алюминиевого штампованного листа с резиновым противоскользящим покрытием и откидными бортами для перевозки отдельных узлов, агрегатов и деталей, а также в исходном состоянии служит как верстак, для диагностики, сборки и разборки узлов и агрегатов.
Такелажное оборудование для фиксации перевозимого груза (11).
Грузоподъемность РТУ - до 100 кг. Габаритная длина изделия составляет 1,20 м, габаритная ширина определяется шириной дверей в МРРДК и равна 0,70 м. Всего в комплекте МРРДК имеются два РТУ.
РТУ предназначено для ремонта техники в полевых условиях в составе МРРДК, в частности для доставки отдельных узлов, агрегатов и деталей с ОВ на пункт диагностики (диагностический контейнер), для диагностирования неисправности, на пункт ремонта (технологический контейнер), для проведения их ремонта, для доставки отремонтированных узлов, агрегатов и деталей к ОВ.
РТУ в исходном состоянии находится в контейнере и подключено к системе автоматической подзарядки аккумуляторных батарей и служит как верстак, для диагностики, сборки и разборки узлов и агрегатов и работает следующим образом:
Ведущим устройством изделия является цифровой блок управления (5), реализованный, на основе цифрового сигнального процессора, работающего по программе, предварительно записанной в его энергонезависимую память основных маршрутов движения:
1. Диагностический контейнер - ОВ;
2. ОВ - диагностический контейнер;
3. Диагностический контейнер - технологический контейнер;
4. Технологический контейнер - диагностический контейнер;
5. Диагностический контейнер - ОВ.
Блок управления (5) координирует работу всех составных частей изделия. Сигнал начала движения изделию может поступить либо с поста дистанционного управления по радиоканалу, либо с поста ручного управления.
В запоминающем устройстве блока управления (5) сохранены данные о множестве опорных точек области функционирования РТУ. Для каждой такой опорной точки хранятся ее координаты и ссылки на набор других опорных точек, в которые может перейти роботизированное транспортное изделие, находясь в данной опорной точке. Движение РТУ осуществляется по прямолинейным участкам, соединяющим опорные точки, изменение направления движения осуществляется в опорной точке по средствам поворота платформы на месте. Блок управления (5), получив по цифровому радиоканалу координаты точки назначения, прокладывает маршрут движения по опорным точкам.
Движение РТУ по маршруту осуществляется следующим образом: находясь в первой опорной точке блок управления (5) выбирает следующую опорную точку, далее исходя из текущей ориентации РТУ, измеренной с помощью датчика ориентации (по магнитному полю Земли), блок управления (5) рассчитывает угол поворота изделия на новую опорную точку и формируя управляющие сигналы на мотор-колеса (10), поворачивает изделие на месте до того момента пока датчик ориентации не покажет, что изделие развернуто в направлении движения на новую опорную точку. Поворот РТУ на месте реализуется с помощью вращения мотор-колес (10) в правом и левом бортах в разных направлениях. После выполнения ориентации РТУ, блок управления выполняет расчет расстояния до новой опорной точки и осуществляет прямолинейное движение до выбранной опорной точки с контролем пройденного расстояния с помощью одометрического датчика. Дополнительно в опорных точках могут быть размещены графические метки, которые считываются камерой машинного зрения для выполнения верификации показаний датчиков. По достижению очередной опорной точки цикл работы повторяется, вплоть до достижения точки являющейся конечной в маршруте. При появлении препятствий движению (например другого изделия) происходит срабатывание лазерной системы безопасности и следует экстренное торможение изделия, после чего запускается процедура объезда с использованием лазерной системы безопасности, камеры машинного зрения и камеры кругового обзора (8).
С целью наиболее полного использования мощности бортового источника питания РТУ при одновременном повышении ее надежности, маневренности и подвижности за счет более точного и более оперативного управления этим РТУ, осуществляется комплексирование информации различных систем определения местоположения РТУ. В дополнение к описанной системе ориентации (определения местоположения) РТУ, могут использоваться курсо-одометрическая навигационная система, а также глобальная спутниковая навигационная система.
По прибытию РТУ к ОВ на грузовую платформу загружаются неисправные узлы, агрегаты и детали, с помощью такелажного оборудования эти детали надежно закрепляются. После загрузки подается команда на перемещение РТУ к следующему рабочему месту и т.д.
Используя сформированную реконструкцию окружающей обстановки и информацию о местонахождении в ней РТУ, блок управления (5) формирует целенаправленную безопасную траекторию движения изделия и обеспечивает его удержание на заданном курсе. В случае, невозможности достижения заданной конечной точки траектории движения осуществляется переход на дистанционное управление. Причем, в случае потери радиосвязи с РТУ, осуществляется автоматический возврат РТУ в начальную точку движения.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании компактного мобильного роботизированного транспортного устройства (РТУ), перевозимого в контейнерах МРРДК, позволяющего выполнять функции по автоматизированной доставке отдельных узлов, агрегатов и деталей с объекта вооружения (ОВ) на пункт диагностики и на пункт ремонта, для проведения диагностики и ремонта, а также для доставки отремонтированных узлов, агрегатов и деталей к ОВ в труднодоступных местах, в неблагоприятных климатических условиях, в условиях радиационного заражения местности и в условиях ограниченного количества имеющихся людских ресурсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ РЕМОНТНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС РАКЕТНО-АРТИЛЛЕРИЙСКОГО ВООРУЖЕНИЯ (МРРДК-РАВ) | 2022 |
|
RU2780079C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| ПРОТИВОТАНКОВАЯ МИНА РОБОТИЗИРОВАННАЯ | 2023 |
|
RU2823707C1 |
Изобретение относится к самодвижущимся платформам робототехнических комплексов. РТУ состоит из двух модулей - базового и грузового. Базовый модуль включает несущий корпус, четыре независимых мотор-колеса, аккумуляторные батареи, контроллер аккумуляторных батарей, вычислительный графический модуль для работы с изображениями, камеру глубины, промышленный компьютер, камеру кругового обзора, датчик определения собственных координат местоположения по сигналам спутниковой навигации, датчик определения углового положения в пространстве, герконы, сенсоры, узел цифровой радиосвязи с системой псевдослучайной перестройки рабочей частоты. Грузовой модуль включает грузовую платформу с откидными бортами, выполненную из алюминиевого штампованного листа с резиновым противоскользящим покрытием, и такелажное оборудование для фиксации перевозимого груза. Достигается возможность выполнения функции по автоматизированной доставке отдельных узлов, агрегатов и деталей на пункт диагностики и на пункт ремонта. 2 з.п. ф-лы, 1 ил.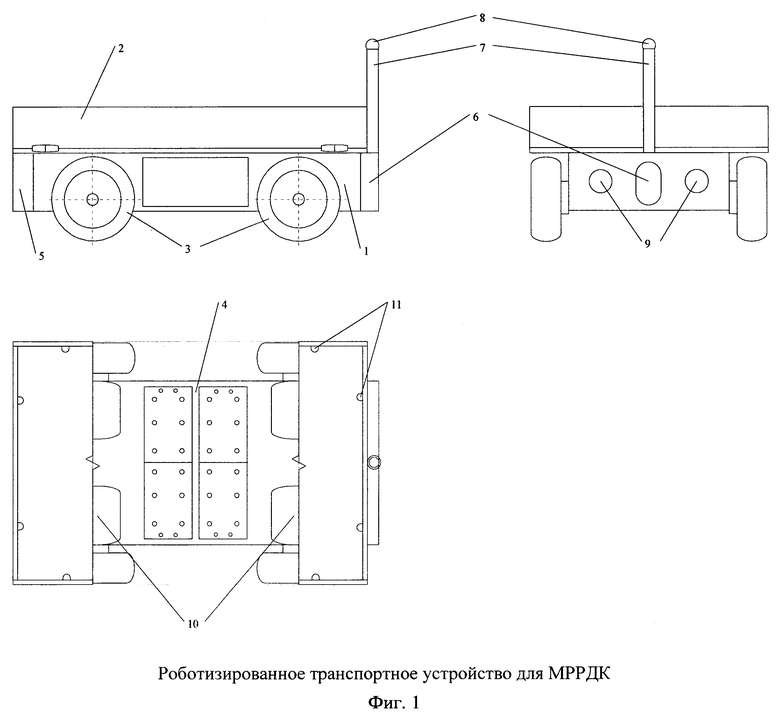
1. Роботизированное транспортное устройство (РТУ), перевозимое в контейнерах мобильного роботизированного ремонтно-диагностического комплекса (МРРДК), содержащее корпус, аккумуляторные батареи, контроллер аккумуляторных батарей, четыре мотор-колеса, модули управления мотор-колесами, вычислительный графический модуль для работы с изображениями, камеру глубины, главный блок управления с компьютером и автопилотом, лазерный дальномер, датчики расстояний, датчики состояния окружающей среды, бампер, внутри которого установлены концевые выключатели, отличающееся тем, что роботизированное транспортное устройство для МРРДК состоит из двух модулей - базового и грузового, базовый модуль включает несущий корпус, изготовленный из пространственной рамы, выполненной в виде сборной конструкции из труб и металлических гнутых профилей, и боковых облицовочных панелей, активное приводное шасси, выполненное в виде четырех независимых мотор-колес, главный блок управления включает промышленный компьютер, камеру кругового обзора, датчик определения собственных координат местоположения по сигналам спутниковой навигации в режиме одометрической навигации и в комплексированном режиме, датчик определения углового положения в пространстве, герконы, сенсоры, узел цифровой радиосвязи с системой псевдослучайной перестройки рабочей частоты (ППРЧ), грузовой модуль включает грузовую платформу с откидными бортами, выполненную из алюминиевого штампованного листа с резиновым противоскользящим покрытием, и такелажное оборудование для фиксации перевозимого груза.
2. Роботизированное устройство по п. 1, отличающееся тем, что габариты устройства составляют 1,2×0,7×0,7 м.
3. Роботизированное устройство по п. 1, отличающееся тем, что грузоподъемность устройства составляет 100 кг.
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| ФУНКЦИОНАЛЬНАЯ ГИЛЬЗА БЕДРА ПРОТЕЗА ГОЛЕНИ | 0 |
|
SU177591A1 |
| US 10011152 B1, 03.07.2018 | |||
| CN 210526689 U, 15.05.2020 | |||
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
