Изобретение относится к области робототехники и может быть использовано для управления мобильным комплексом.
Известен способ управления подвижным роботом (патент РФ №2424892, 27.07.2011 г.), согласно которому проводят глобальную навигацию робота в заданных пределах местности с помощью блока глобального позиционирования, получают изображение земной поверхности, осуществляют картографирование неизвестной местности, составляют прогноз о поверхностном распределении объектов на пути робота, находят оптимальный маршрут движения робота, устанавливают параметры траектории движения робота, при этом с учетом текущей информации о местонахождении робота и о поверхностном распределении объектов непосредственно впереди по курсу движения робота определяют параметры движения робота, причем непосредственно управление движением автономного робота осуществляют, как с учетом спланированного направления движения, так и с учетом информации о препятствиях на пути робота, полученной с помощью блока горизонтального зрения и блока тактильных сенсоров.
Недостатком данного технического решения является неудобство и сложность в реализации. При этом ухудшаются такие количественные показатели, как средняя скорость перемещения между начальной и конечной точкой, количество столкновений с препятствиями на единицу пути.
Наиболее близким по техническому решению является мобильный робот (RU №2487007 С1), содержащий платформу, установленную на транспортном средстве, устройство для обнаружения препятствия, систему управления с блоком управления движением транспортного средства и устройством для обнаружения препятствия и соединенную с ними, манипулятор, шарнирно установленный на платформе и выполненный в виде снабженных приводами и шарнирно соединенных между собой звеньев, на конечном из которых размещено устройство для обнаружения препятствия, имеющее подвижный щуп с наконечником и позиционно-чувствительный датчик. Блок управления движением транспортного средства подключен к блоку питания, связанному с последовательно соединенными микроконтроллером, шестым усилителем и электроприводом, входы микроконтроллера соединены с выходами датчиков текущего положения, скорости, углового и линейного перемещений, выполненных в виде энкодеров, зубчатки которых установлены на каждом колесе транспортного средства.
Недостатком данного технического решения является сложность в реализации, наличие сложных технических средств и методов определения координат положения робота, неэффективная работа в условиях плохой видимости (сильного дождя, тумана или снега).
Задачей данного изобретения является повышение эффективности функционирования мобильного роботизированного комплекса для садоводства, при этом достигается технический результат, заключающийся в корректировке траектории движения наземного роботизированного комплекса вдоль линии посадки деревьев.
Техническим результатом изобретения является обеспечение контроля траектории движения наземного мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев за счет определения дистанции от наземного роботизированного комплекса до дерева посредством датчика касания, осуществлении регистрации изменения угла поворота подвижной штанги посредством энкодера, сравнении полученных значений с заданными контрольными значениями дистанции и угла поворота подвижной штангии вычислении угла поворота рулевого мотор-редуктора для возвращения наземного роботизированного комплекса на заданную траекторию движения.
Технический результат достигается при использовании способа управления движением наземного мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев, включающего установку на раме упомянутого комплекса подвижных штанг с датчиками касания, связанных с контроллером, при этом на основании, в том числе, сигналов датчиков касания при их контакте с деревьями посредством контроллера формируют управляющие команды для рулевого мотор-редуктора упомянутого комплекса, при этом подвижные штанги устанавливают на раме комплекса с возможностью поворота и снабжают их энкодерами, посредством которых осуществляют измерение угла поворота штанг при их контакте с деревьями, при этом на основании сигналов датчиков касания определяют дистанцию от упомянутого комплекса до дерева и посредством контроллера сравнивают полученные значения с заданными контрольными значениями дистанции и угла поворота подвижных штанг, на основании сравнения которых формируют управляющие команды для рулевого мотор-редуктора в виде продолжения движения упомянутого комплекса без изменения курса, движения в сторону к дереву или от дерева, остановки движения комплекса, при этом датчики касания располагают в пазе подвижной штанги, а подвижные штанги снабжают возвратными пружинами.
Краткое описание чертежей
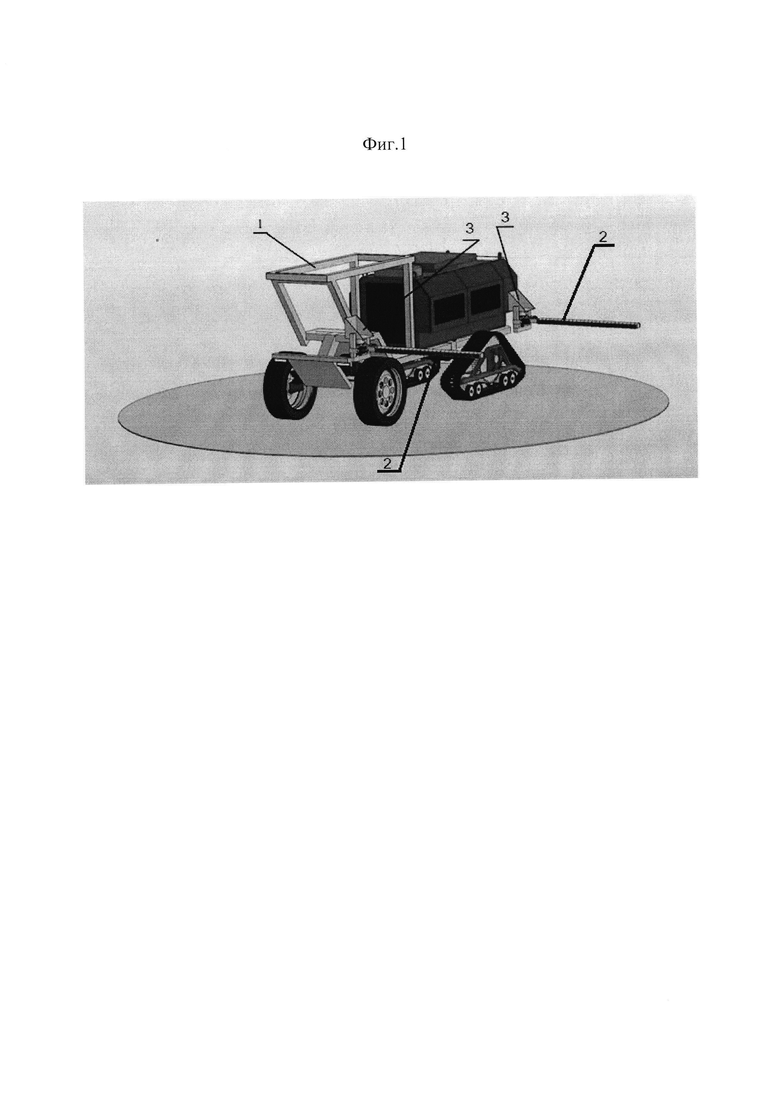
На фиг. 1 представлен общий вид мобильного роботизированного комплекса для садоводства.
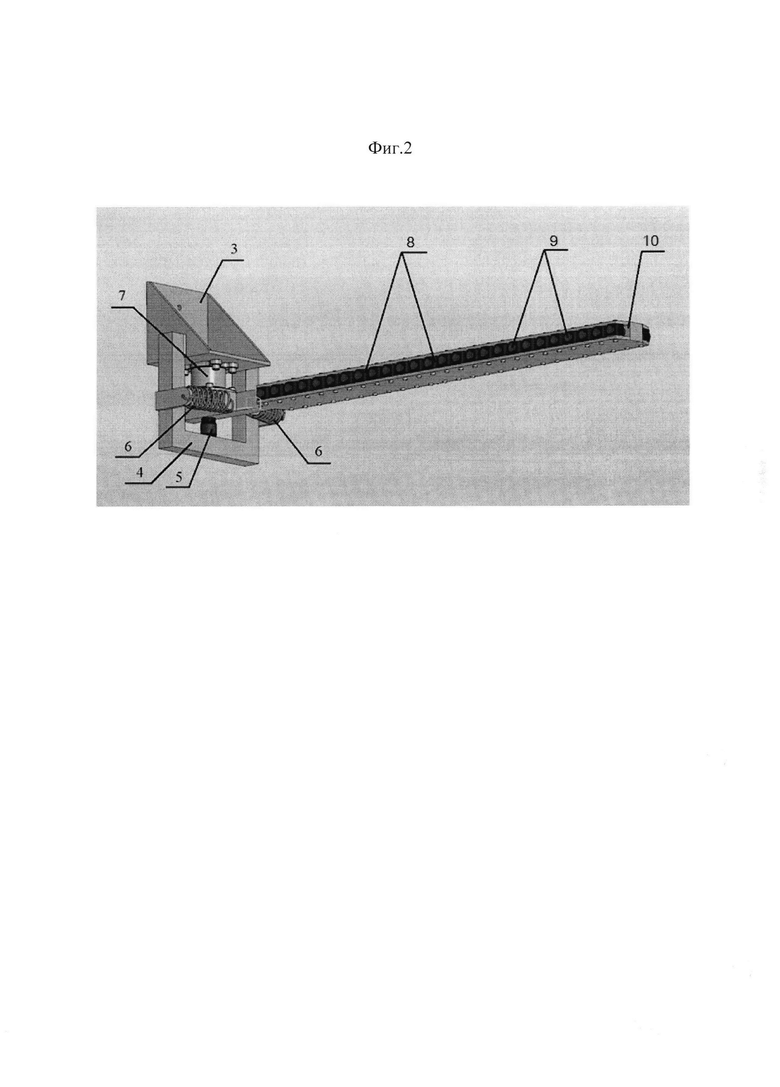
На фиг. 2 изображена подвижная штанга в сборе.
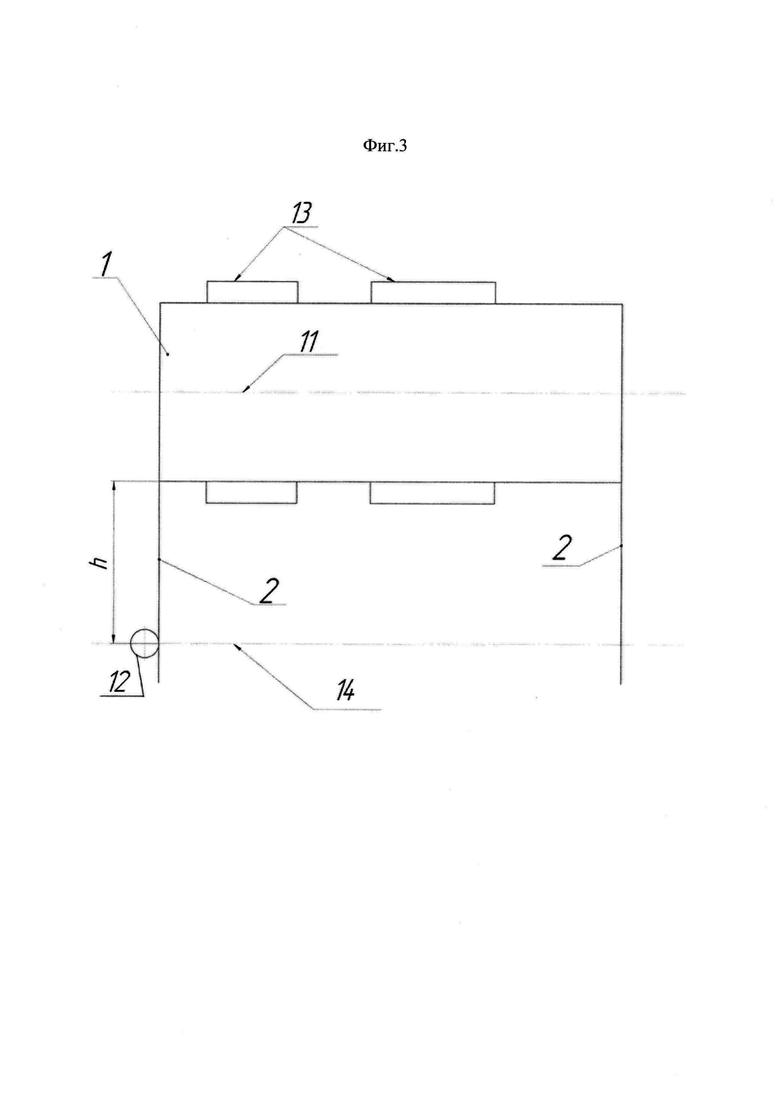
На фиг. 3 изображена схема контрольного положения мобильного роботизированного комплекса для садоводства.
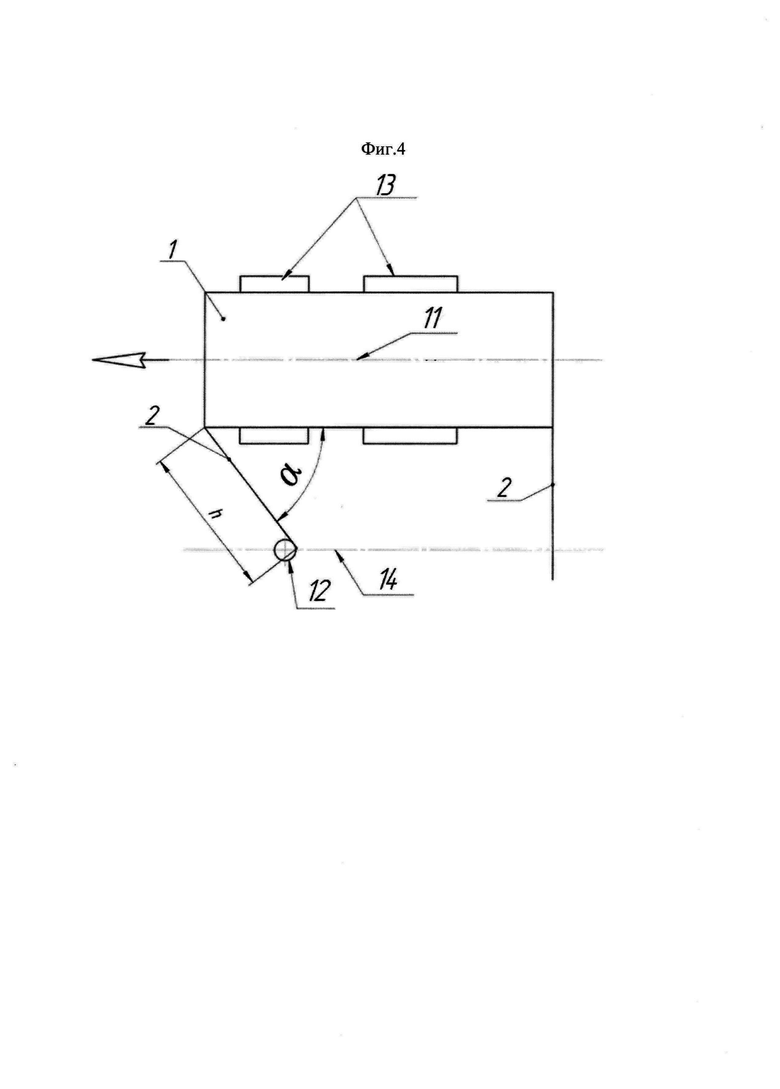
На фиг. 4 изображена схема угла поворота подвижной штанги при движении мобильного роботизированного комплекса для садоводства.
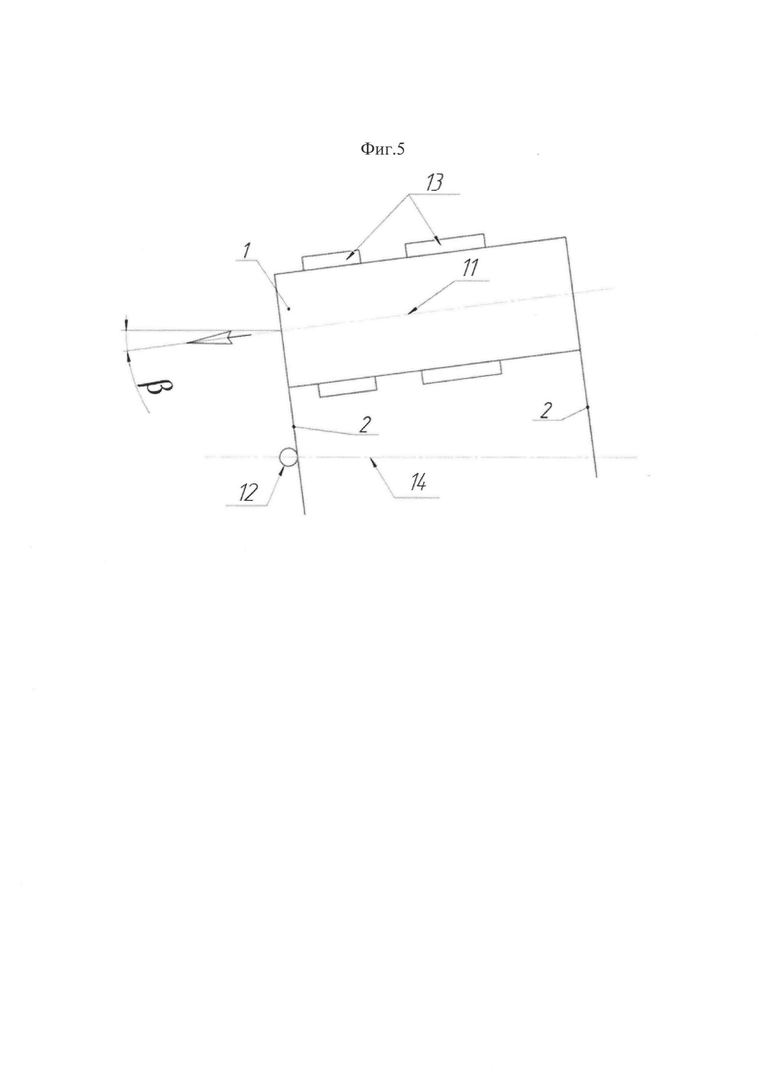
На фиг. 5 изображена схема отклонения мобильного роботизированного комплекса для садоводства от предполагаемой траектории движения.
На фигурах обозначено: 1 - мобильный роботизированный комплекс для садоводства, 2 - подвижная штанга, 3 - кронштейн рамы; 4 - кронштейн подвижной штанги; 5 - ступичный подшипник; 6 - пружина, 7 - энкодер, 8 -резиновая втулка, 9 - датчик касания, 10 - паз, 11 - ось симметрии мобильного роботизированного комплекса для садоводства, 12 - дерево, 13 -движитель, 14 - линия посадки деревьев.
Заявляемый способ реализуется при помощи подвижных штанг 2, установленных на мобильном роботизированном комплексе для садоводства 1 (фиг. 1), состоящих из кронштейна 3 крепления к раме мобильного роботизированного комплекса для садоводства и кронштейна 4 крепления подвижной штанги (фиг. 2), соосно закрепленного энкодера 7, возвратной пружины 6, ступичного подшипника 5, резиновых втулок 8 и датчиков касания 9, расположенных в пазу 10.
Перед началом движения оператор выставляет мобильный роботизированный комплекс для садоводства 1 в контрольное положение, характеризуемое следующими параметрами (фиг. 3):
1. Ось симметрии 11 мобильного роботизированного комплекса для садоводства 1 параллельна линии посадки деревьев 14, то есть траектория движения мобильного роботизированного комплекса для садоводства 1 предполагается вдоль линии посадки деревьев 14. Движитель 13 (например, колеса) мобильного роботизированного комплекса для садоводства 1 параллельны оси симметрии 11 мобильного роботизированного комплекса для садоводства 1.
2. Подвижная штанга 2, расположенная в передней части мобильного роботизированного комплекса для садоводства 1, касается дерева 12 в точке соответствующей нормальной дистанции (расстояние h) - движение без изменения курса (фиг. 3). В программе управления фиксируется значение длины нормальной дистанции (расстояние h), в соответствии со значением длины нормальной дистанции (расстояние h) контроллером вычисляется и программой управления фиксируется значение максимального угла поворота штанги α (фиг. 4) при движении мобильного роботизированного комплекса для садоводства 1 вперед по предполагаемой траектории - вдоль линии посадки 14 деревьев 12 без изменения курса. После чего программа управления фиксирует дистанции, в соответствии с которыми определяются логические действия:
1. Нормальная дистанция - движение без изменения курса.
2. Критически малая дистанция - движение в сторону от дерева.
3. Критически большая дистанция - движение в сторону к дереву.
4. Отсутствие дистанции - остановка мобильного роботизированного комплекса для садоводства.
После установки мобильного роботизированного комплекса для садоводства 1 в контрольное положение, оператор приводит мобильный роботизированный комплекс для садоводства 1 в движение. В момент касания подвижной штанги 2 дерева 12, срабатывает соответствующий датчик касания 9, в момент касания контроллер вычисляет длину от точки касания до оси вращения подвижной штанги (ось вращения энкодера). При соответствии вычисленной длины нормальной дистанции программа управление выбирает логическое действие - движение без изменения курса.
При дальнейшем движении мобильного роботизированного комплекса для садоводства 1 в случае отклонения (например, от наезда на какое-либо препятствие) от предполагаемой траектории вдоль линии посадки деревьев 14 (фиг. 5) в момент касания подвижной штанги 2 дерева 12, срабатывает соответствующий датчик касания 9, в момент касания контроллер вычисляет длину от точки касания до оси вращения подвижной штанги 2. При несоответствии вычисленной длины (например, критически малая дистанция) длине нормальной дистанции (расстояние h) программа управления вычисляет угол корректировки траектории β движения мобильного роботизированного комплекса для садоводства 1, выбирает логическое действие - движение в сторону от дерева 12, контроллером вычисляется угол поворота рулевого мотор-редуктора (на чертеже не показан), для возвращения мобильного роботизированного комплекса для садоводства 1 на траекторию движения, определяемую нормальной дистанцией.
Одновременно с движением мобильного роботизированного комплекса для садоводства 1 в сторону от дерева 12 энкодер 7 вычисляет значение угла поворота а подвижной штанги 2, и при достижении угла а значения равного значению максимального угла поворота штанги а зафиксированного системой в контрольном положении система управления посредством поворота рулевого мотор-редуктора возвращает колеса движителя 13 параллельно оси симметрии 11 мобильного роботизированного комплекса для садоводства 1. При дальнейшем движении мобильного роботизированного комплекса для садоводства 1 описанный выше алгоритм справедлив и при касании дерева 12 подвижной штангой 2, находящейся в задней части мобильного роботизированного комплекса для садоводства 1.
В случае несоответствия вычисленной длины (например, критически болыпаядистанция) длине нормальной дистанции (расстояние h) программа управления вычисляет угол корректировки траектории движения β мобильного роботизированного комплекса для садоводства 1, выбирает логическое действие - движение в сторону к дереву 12, контроллером вычисляется угол поворота рулевого мотор-редуктора для возвращения наземного роботизированного комплекса 1 на траекторию движения, определяемую нормальной дистанцией. Далее при фиксировании энкодером 7 значения угла поворота подвижной штанги α соответствующего значению угла поворота подвижной штанги α, зафиксированного системой в контрольном положении, система управления посредством поворота рулевого мотор-редуктора возвращает колеса движителя 13 параллельно оси симметрии 11 мобильного роботизированного комплекса для садоводства 1.
В случае отсутствия сигнала от датчика касания подвижных штанг 2 система управления выбирает логическое действие - остановка мобильного роботизированного комплекса для садоводства 1.
При отсутствии механического воздействия на штанги 2, предусмотрены удерживающие пружины 6 для возвращения подвижных штанг 2 в исходное перпендикулярное положение относительно траектории движения мобильного роботизированного комплекса для садоводства 1 (вдоль линии посадки деревьев 14).
Заявляемый способ управления позволяет:
1. Удобно и просто реализовать управление движением наземного мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев.
2. Исключить наличие сложных технических средств и методов определения координат положения мобильного роботизированного комплекса для садоводства.
3. Контролировать траекторию движения мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев в любых погодных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
Изобретение относится к области робототехники и может быть использовано, например, для управления движением наземного мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев. Способ включает установку на раме упомянутого комплекса подвижных штанг с датчиками касания, связанных с контроллером, при этом по сигналам датчиков касания при их контакте с деревьями посредством контроллера формируют управляющие команды для рулевого мотор-редуктора комплекса. При этом подвижные штанги устанавливают на раме комплекса с возможностью поворота и снабжают их энкодерами, посредством которых осуществляют измерение угла поворота штанг при их контакте с деревьями, а на основании сигналов датчиков касания определяют дистанцию от упомянутого комплекса до дерева и посредством контроллера сравнивают полученные значения с заданными контрольными значениями дистанции и угла поворота подвижных штанг, на основании сравнения которых формируют управляющие команды для рулевого мотор-редуктора в виде продолжения движения упомянутого комплекса без изменения курса, движения в сторону к дереву или от дерева, остановки движения комплекса. Использование изобретения позволяет упростить оборудование для управления движением комплекса. 2 з.п. ф-лы, 5 ил.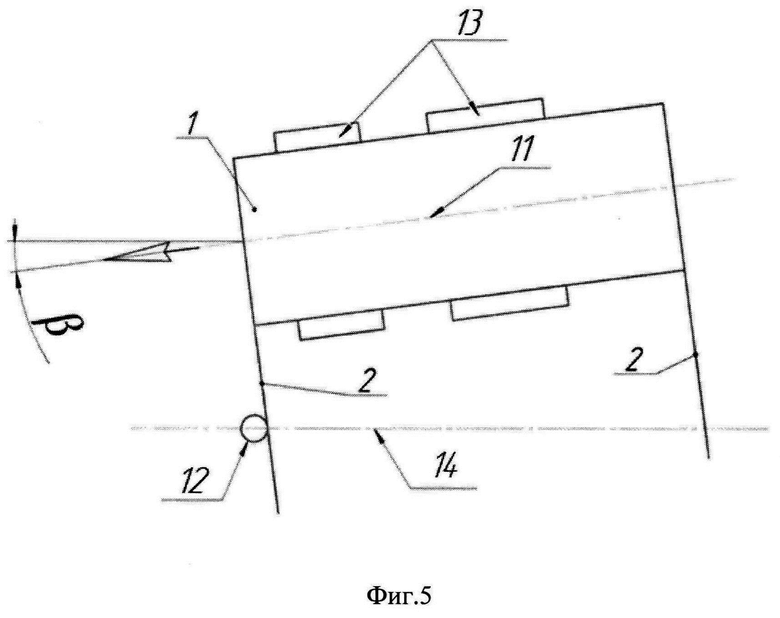
1. Способ управления движением наземного мобильного роботизированного комплекса для садоводства вдоль линии посадки деревьев, включающий установку на раме упомянутого комплекса подвижных штанг с датчиками касания, связанных с контроллером, при этом на основании, в том числе, сигналов датчиков касания при их контакте с деревьями посредством контроллера формируют управляющие команды для рулевого мотор-редуктора упомянутого комплекса, отличающийся тем, что подвижные штанги устанавливают на раме комплекса с возможностью поворота и снабжают их энкодерами, посредством которых осуществляют измерение угла поворота штанг при их контакте с деревьями, при этом на основании сигналов датчиков касания определяют дистанцию от упомянутого комплекса до дерева и посредством контроллера сравнивают полученные значения с заданными контрольными значениями дистанции и угла поворота подвижных штанг, на основании сравнения которых формируют управляющие команды для рулевого мотор-редуктора в виде продолжения движения упомянутого комплекса без изменения курса, движения в сторону к дереву или от дерева, остановки движения комплекса.
2. Способ по п. 1, отличающийся тем, что датчики касания располагают в пазе подвижной штанги.
3. Способ по п. 1, отличающийся тем, что подвижные штанги снабжают возвратными пружинами.
| МОБИЛЬНЫЙ РОБОТ | 2012 |
|
RU2487007C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ РОБОТОМ | 2015 |
|
RU2619542C1 |
| АВТОНОМНЫЙ МОБИЛЬНЫЙ РОБОТ ДЛЯ СБОРА ДИКОРОСОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2424892C2 |
| Способ и устройство мобильного робота для прохождения замкнутых контуров и лабиринтов | 2017 |
|
RU2670826C9 |
| МОБИЛЬНЫЙ РОБОТ | 2004 |
|
RU2274543C1 |
| CN 106217348 A, 14.12.2016 | |||
| CN 108068122 A, 25.05.2018. | |||
