Изобретение относится к измерению параметров движения и касается преимущественно измерения скорости линейного перемещения проводника с током пр заданной траектории, в частности, определения закона изменения скррости,
Целью изобретения является повышение достоверности измерения скорости за счет улучшения помехозащищенности, без увеличения количества датчиков.
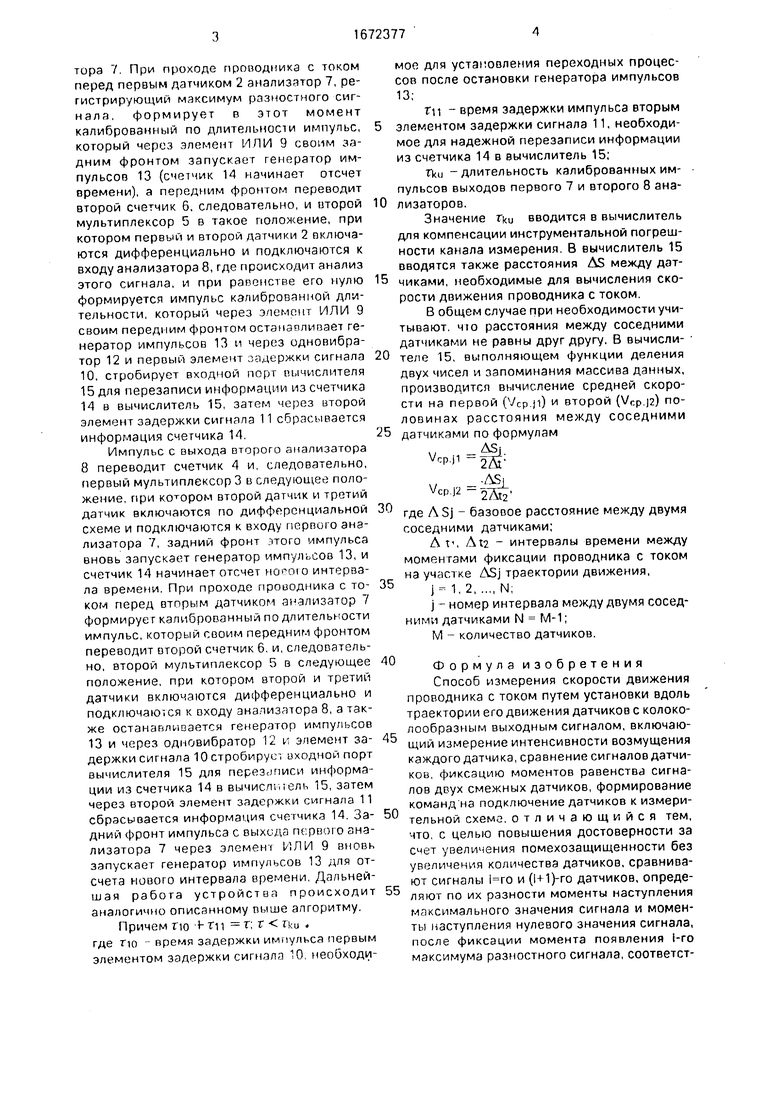
На фиг. 1 приведена структурная схема устройств, осуществляющего предлагаемый способ; на фиг 2 - диаграмма, поясняющая суть способа.
Для измерения скорости проводника с током 1 устройство содержит датчики 2 с колоколообразным выходным сигналом, первый мультиплексор 3,первый счетчик 4, второй мультиплексор 5, второй счетчик 6, первый анализатор 7 сигналов датчиков,
второй анализатор 8 сигналов датчиков, элемент ИЛИ 9, первый элемент задержки 10, второй элемент задержки 11, одновибратор 12, генератор импульсов 13, третий счетчик 14 и вычислитель 15.
Способ измерения скорости движения проводника с током осуществляется следующим образом.
Вдоль пути движения проводника с током на одинаковом фиксированном рассто- янии Д S друг от друга располагаются датчики 2 для измерения интенсивности поля движущегося проводника с током 1. При движении проводника с током вдоль датчиков 2 последние регистрируют изменения интенсивности поля движущегося проводника с током. В начальный момент измерения первый и второй датчики 2 при помощи первого мультиплексора 3 подключаются по дифференциальной схеме к входу анализаО
VI
ю со VI VI
тира 7. При проходе проводника с током перед первым датчиком 2 анализатор 7, регистрирующий максимум разностного сигнала, формирует в этот момент калиброванный по длительности импульс, который через элемент ИЛИ 9 своим задним фронтом запускает генератор импульсов 13 (счетчик 14 начинает отсчет времени), а передним фронтом переводит второй счетчик 6, следовательно, и иторой мультиплексор 5 в такое положение, при котором первый и второй датчики 2 включаются дифференциально и подключаются к входу анализатора 8, где происходит анализ этого сигнала, и при равенстве его нулю формируется импульс калиброванной длительности, который через элемент ИЛИ 9 своим передним фронтом останавливает генератор импульсов 13 и через одновибра- тор 12 и первый элемент задержки сигнала 10, стробирует входной порт вычислителя 15 для перезаписи информации из счетчика 14 в вычислитель 15, затем через второй элемент задержки сигнала 11 сбрасывается информация счетчика 14.
Импульс с выхода второго анализатора 8 переводит счетчик 4 и, следовательно, первый мультиплексор 3 в следующее положение, при котором второй датчик и третий датчик включаются по дифференциальной схеме и подключаются к входу первого анализатора 7, задний фронт птого импульса вновь запускает генератор импульсов 13, и счетчик 14 начинает отсчет НОРОЮ интервала времени. При проходе проводника с то- ком перед вторым датчиком анализатор 7 формирует калиброванный по длительности импульс, который своим передним фронтом переводит второй счетчик 6. и, следовательно, второй мультиплексор 5 в следующее положение, при котором второй и третий датчики включаются дифференциально и подключаю1ся к входу анализатора 8, а также останавливается генератор импульсов 13 и через одновибратор 12 и элемент за- держки сигнала 10 стробирусп входной порт вычислителя 15 для перезаписи информации из счетчика 14 в вычислшель 15, затем через второй элемент задержки сигнала 11 сбрасывается информация счетчика 14. За- дний фронт импульса с выхода первого анализатора 7 через элемент ИЛИ 9 вновь запускает генератор импульсов 13 для отсчета нового интервала времени, Дальнейшая работа устройства происходит аналогично описанному выше алгоритму.
Причем По V- П1 - т; г iku . где гю - время задержки импульса первым элементом задержки сигнала 10, необходимое для установления переходных процессов после остановки генератора импульсов 13;
Гц - время задержки импульса вторым элементом задержки сигнала 11, необходимое для надежной перезаписи информации из счетчика 14 в вычислитель 15;
Tku -длительность калиброванных импульсов выходов первого 7 и второго 8 анализаторов.
Значение вводится в вычислитель для компенсации инструментальной погрешности канала измерения. В вычислитель 15 вводятся также расстояния AS между датчиками, необходимые для вычисления скорости движения проводника с током.
В общем случае при необходимости учитывают, чю расстояния между соседними датчиками не равны друг другу. В вычислителе 15, выполняющем функции деления двух чисел и запоминания массива данных, производится вычисление средней скорости на первой (Vcp.jt) и второй (Vcp.j2) половинах расстояния между соседними датчиками по формулам
2ДГ
-ASi
Vcp.jl
w-/ЛЬ1
VCP.J2 2XЛ2
где ASj - базовое расстояние между двумя соседними датчиками;
Л t Ata - интервалы времени между моментами фиксации проводника с током на участке ASJ траектории движения,
J- 1, 2N;
j - номер интервала между двумя соседними датчиками N М-1;
М - количество датчиков.
Формула изобретения Способ измерения скорости движения проводника с током путем установки вдоль траектории его движения датчиков с колоко- лообразным выходным сигналом, включающий измерение интенсивности возмущения каждого датчика, сравнение сигналов датчиков, фиксацию моментов равенства сигналов доух смежных датчиков, формирование командна подключение датчиков к измерительной схема, отличающийся тем, что, с целью повышения достоверности за увеличения помехозащищенности без увеличения количества датчиков, сравнивают сигналы и (i+1)-ro датчиков, определяют по их разности моменты наступления максимального значения сигнала и моменты наступления нулевого значения сигнала, после фиксации момента появления 1-го максимума разностного сигнала, соответствующего прохождению проводником с током 1-го датчика, измеряют первый интервал времени до момента фиксации нулевой разности сигналов 1-го и (1+1)-го датчиков, что сооветствует нахождению проводника с током посередине между l-м и (I 1)-м датчиками, после чего измеряют второй интервал времени между упомянутым моментом достижения разностным сигналом нулевого значения и моментом появления (i+1)-ro максимума разностного сигнала, соответствующим прохождению проводником с то
ком (1-Ч)-го датчика, отключают от измерительной схемы i-й датчик и одновременно подключают к ней (К2)-й датчик, после чгго выполняют аналогичные операции с (I 1)-м и (+2)-м, (2)-м и (+3)-м датчиками и т.д., причем на каждом интервале пути между соседними датчиками определяют значения средней скорости на первой и второй его половинах как отношение половины расстояния между соответствующими соседними датчиками к первому и второму измеренным интервалам времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения объекта | 1988 |
|
SU1583846A1 |
| Способ измерения скорости движения проводника с током | 1990 |
|
SU1826066A1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737345A1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737346A1 |
| Способ измерения скорости движения объекта и устройство для его осуществления | 1988 |
|
SU1672378A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖУЩЕГОСЯ КАБЕЛЬНОГО ИЗДЕЛИЯ | 1999 |
|
RU2183838C2 |
| Устройство для измерения скорости линейного перемещения объекта | 1987 |
|
SU1569714A1 |
| Устройство для сварки | 1987 |
|
SU1563916A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
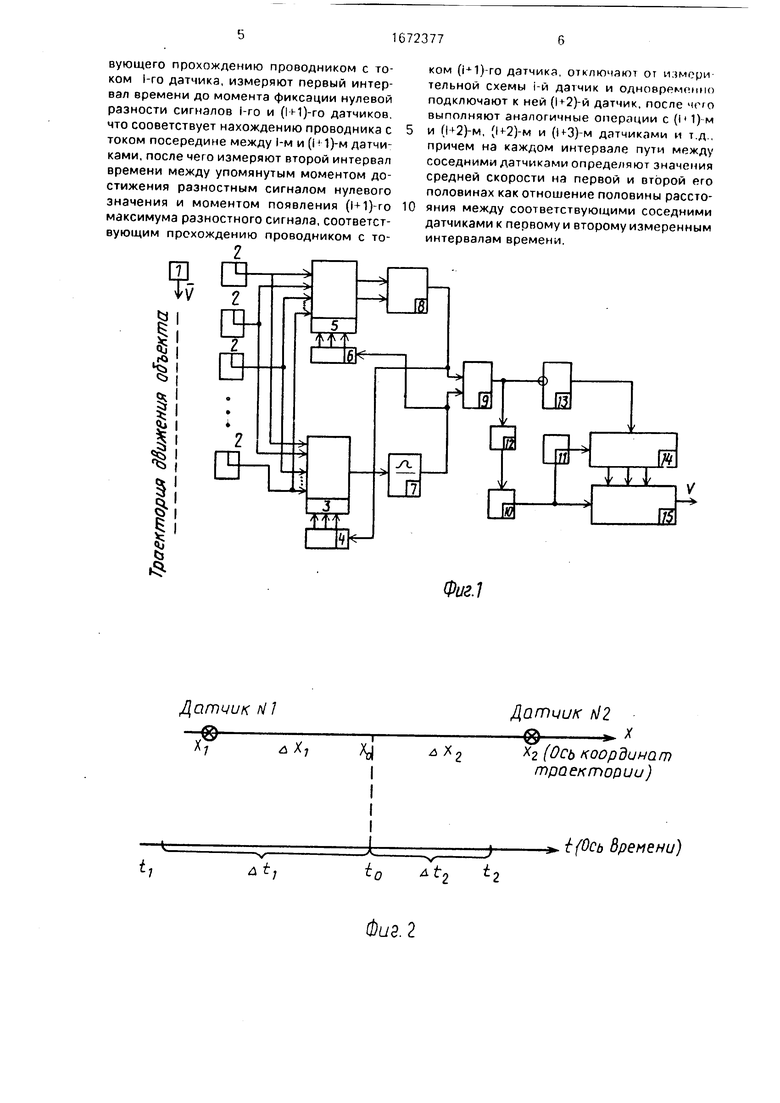
Изобретение относится к измерению параметров движения и касается преимущественно измерения скорости линейного перемещения объекта по заданной траектории. Целью изобретения является повышение достоверности путем увеличения помехозащищенности. Это достигается тем, что кроме регистрации момента прохождения объектом каждого датчика по разностному сигналу с двух датчиков, регистрируется также момент равенства сигналов от двух соседних датчиков, что соответствует вполне определенной координате на траектории: расположению объекта в середине расстояния между соседними датчиками. Измеряя время прохождения объектом первой и второй половины этого расстояния, получают дополнительную информацию о величине скорости на каждой из половин расстояния между датчиками. 2 ил.
Датчик л//
Датчик л/2
| Способ измерения скорости движения объекта | 1982 |
|
SU1068818A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
