со
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖУЩЕГОСЯ КАБЕЛЬНОГО ИЗДЕЛИЯ | 1999 |
|
RU2183838C2 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737345A1 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для измерения скорости движения объекта | 1990 |
|
SU1789933A1 |
| Способ измерения скорости движения объекта | 1990 |
|
SU1817027A1 |
| Устройство для измерения скорости перемещения объекта | 1989 |
|
SU1737346A1 |
| Цифровой одноканальный инфранизкочастотный фазометр | 1987 |
|
SU1472831A1 |
Использование: измерение параметров движения. Сущность изобретения: измеряют интенсивность возмущения объектом каждого датчика, по разностному сигналу двух соседних датчиков фиксируют моменты наступления максимума и нулевого значения, измеряют первый интервал времени ATM между моментом появления 1-го максимума и нулевым значением, после чего измеряют второй интервал времени Ati2 между моментом достижения нулевого значения разностного сигнала и моментом появления (l-M)-ro максимума, определяют сумму сигналов двух соседних датчиков - S и интервал разности сигналов двух соседних датчиков - d, а скорость объекта на первой vn и второй г половине участка определяют как vn 2 (Дтп -d/S) И Vi2 2(Ati2-d/S) где AS - расстояние между датчиками. 1 ил.
Изобретение относится к области измерительной техники и может быть использовано для измерения параметров движения в частности измерения скорости линейного перемещения объекта по заданной траектории.
Целью изобретения является повышение точности измерения скорости за счет компенсации задерже к, возникающих при измерении скорости.
Поставленная цель достигается за счет того, что в способе измерения скорости движения объекта путем установки вдоль траектории его движения датчиков, включающий измерение интенсивности возмущения каждого датчика Ct(t), сравнение сигналов датчи- ков, фиксацию моментов равенства
сигналов двух смежных датчиков, формирование команд на подключение датчиков к измерительной схеме, а также сравнение сигнала 1-го и (i+1)-ro датчиков, после чего определяют по разности моменты наступления максимального значения сигнала и момента наступления нулевого значения, после фиксации момента появления максимума разностного сигнала, соответствующего прохождению проводников с током датчика, измеряют первый интервал времени до момента фиксации нулевой разности 1-гои(И-1)-го датчиков AIM. после чего измеряют второй интервал времени между упомянутыми моментом достижения разностным сигналом нулевого значения и моментов появления i+1-го датчика Ati2. от00
ю о о о о
ключают от измерительной схемы i-ый датчик и одновременно подключают к ней (1+2) датчик, после чего выполняют аналогичные операции с (1+1)-ым и (I+2), а также (1+2), и (1+3)-им датчиками и т.д., дополнительно определяют сумму сигналов от двух соседних датчиков, интегрируют определенную ранее разность сигналов соседних датчиков: а скорость vi 1 объекта на первом участке определяют по формуле
vn
AS
2(Atn -d/S)
где d - интеграл разности сигналов, S - их сумма, AS - расстояние между датчиками, а на втором участке vis:
VI2
AS
2 (Ati2 - d/S)
Сущность предлагаемого способа заключается в том, что при измерении интенсивности возмущения каждого датчика сигнал на его выходе имеет задержку относительно возмущения, которое вносит в датчик движущийся объект. Эта задержка возникает вследствие конечной индуктивности индукционного датчика и при больших скоростях движения объекта и, следовательно, при больших скоростях нарастания сигнала эта задержка приведет k существенной координатной погрешности, так как объект при равенстве сигналов от двух соседних датчиков уже находится не посередине между датчиками. Следовательно, при определении скорости по фор- AS
муле v
возникает погрешность, так
как объект уже сместился от заданной координаты. Причем эти задержки, естественно, определяются скоростью движения объекта.
Рассмотрим сигнал на выходе одного датчика в виде f(t - т), а на выходе второго (соседнего), в виде f(T -1 - г), где г- задержка, возникающая на выходе датчика, Т - временной интервал между максимумами двух соседних датчиков.
Представим выходной сигнал обоих датчиков в виде степенного ряда в окрестности точки t
f(t-t) f(t) + f(t}r+1L r(t)r2 + ...
f(T-t-r)
. 1
2
f CT
f(T-t) + f(T-t)r + -t)2...
При этом, если бы датчики не были инерционными, на их выходах действовало напряжение f(t) и f(T - t) соответственно.
При этом в соответствии со способом прототипом в точке регистрации f(T - t) f(t), а вследствие идентичности датчиков f(t) - -f (T - t); f(t) - f(T - t);
f(t) ) и т.д., учтя эти выражения получаем
f(t - т) f(t) -i- f (t) т+-±- f (t) г2 + ... f(T -1 - г) t(T-t) + fCT-t)r+-2yf(T-t)i2 + ... - fW-fWr-f- -rwr2...
20 ем
Просуммировав оба выражения получаf(t - т) + f(T -1 - т) 2f(t) + f(t) т2 + .... а вычтя одно из другого получаем
25 f(t-t)-fn--t-T) 2f(t)(t)rJ + ...,
то есть получаем систему уравнений вида.
f (t-r)4-f (T-t-r) 302
nt)+-oVnt)2...
(1)
f(t-r)-f(T -t-r) 352
- fWr-t-- - Г фт3... преобразовав выражение (1) к виду
f(t-r)+ffT-t-r) f(t) -TT-nD Ti- Wt4...
(2)
Можно сделать вывод, что разница между допустимой реальных выходных сигналов (для безынерционного датчика) определяется правовой частью данного выражения. Условием, когда эта разница равна нулю является условие, что
f (t) const,(3)
то есть для обеспечения совпадения
fCt-Q+fCT-t-Tl, (г)
Необходимо выбрать такую точку на характеристике сигнала, чтобы f (t) const, то
есть, чтобы в пределах существующей задержки г была зона f(t) линейного вида, учтя это ограничение выражение 2 преобразовывается к виду:
f(t-r)-f(T-t-r)
f W.r
Взяв интеграл обоих частей этого выражения по t получаем
(t-r)-f(T-t-r)dt f(t)r
t
учтя 1, получаем, что
г
(t-r)-f(T-t-r)dt
t
f (t-r) + f (T-t-т)
To есть через параметры выходного сигнала реальных датчиков можно определить задержку сигналов на выходе датчика и учесть ее при определении временных интервалов, необходимых при определении скорости. При этом необходимо учитывать условие 3, то есть: f (t) const.
С учетом вышеизложенного структурная схема, реализующая предлагаемый способ может быть такого же вида как и в устройстве прототипе. При этом полученная разница двух выходных сигналов интегрируется и при формировании сигнала равенства выходных сигналов f(t - г) и f(T -1 - т) по соответствующей формуле производится расчет поправочной задержки и скорости на двух интервалах движения обьекта.
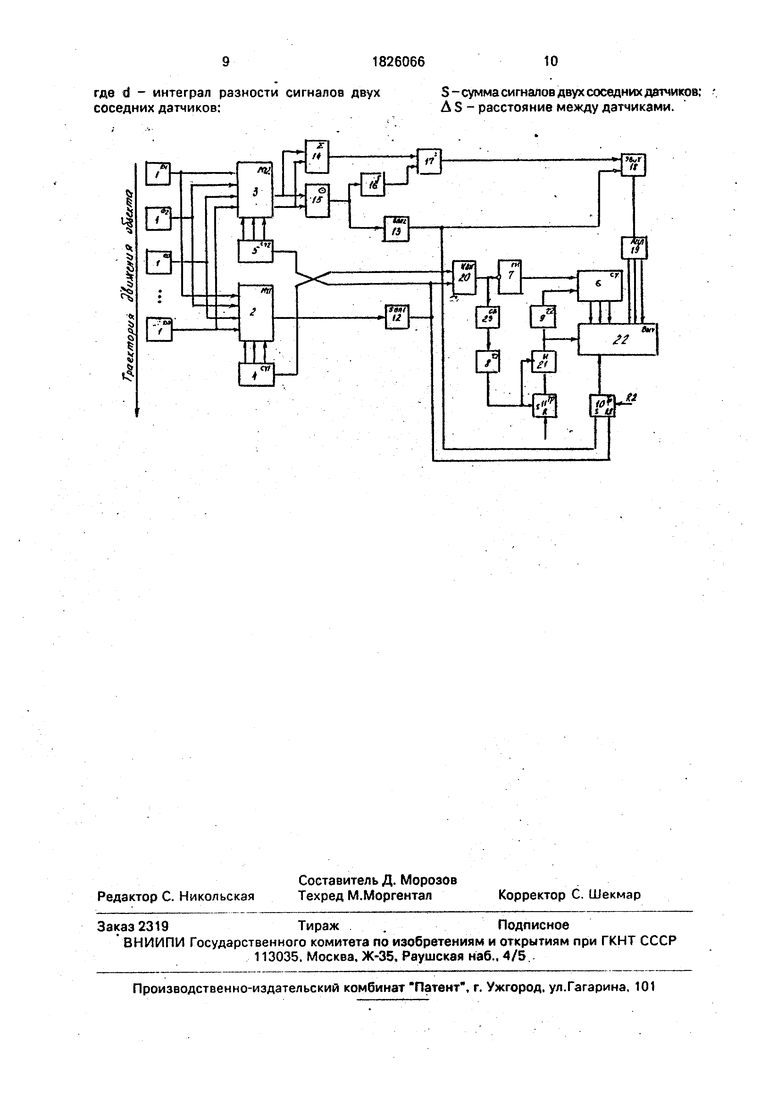
На чертеже представлена структурная схема предлагаемого устройства.
Устройство содержит датчики 1, мультиплексоры 2, 3, счетчики 4, 5, 6, генератор импульсов 7, элементы задержки сигнала 8, 9,триггеры 10, 11, блоки выделения-признака 12,13, сумматор 14, вычитатель 15, интегратор 16, делитель 17, элемент выборки и хранения 18, аналого-цифровой преобразователь 19, элемент ИЛИ 20, элемент И 21, вычислитель 22 и одновибра- тор 23.
Выходы датчиков 1 соединены с выходами обоих мультиплексоров 2, 3. Выход первого мультиплексора 2 соединен через первый блок выделения признака сигнала 12 с первым входом элемента ИЛИ 20, с первым входом первого триггера 10 и с счетным входом второго счетчика 5, выходы которого соединены с входами управления- второго мультиплексора 3. Выходы второго мультиплексора 3 соединены с входами вы- читателя 15 и сумматора 14, выход которого
соединен с первым входом делителя 17, второй вход которого соединен через интегратор 16 с выходом вычитателя 15 и входом второго блока выделения признака сигнала 5 13. Выход второго блока выделения признака сигнала 13 соединен с вторым входом элемента ИЛИ 20, с стробирующим входом элемента выбора и хранения 18 и с счетным входом первого счетчика 4. Ин0 формационный вход элемента выбора и хранения 18 соединен с выходом делителя 17, а выход с входом аналого-цифрового преобразователя 19, выходы которого соединены с вторыми информа5 ционными входами вычислителя 22, первые информационные входы которого соединены с выходами третьего счетчика 6, счетный вход которого соединен с выходом генератора импульсов 7. Выход элемента ИЛИ 20
0 соединен с управляющим входом генератора импульсов 7 и через одновибратор 23 и первый элемент задержки 8 с первым входом элемента И 2t и с первым входом второго триггера 11, выход которого соединен
5 с вторым входом элемента И 21. Выход элемента И 21 соединен с стробирующим входом вычислителя 22 и через второй элемент задержки сигнала 9 с входом сброса третьего счетчика 6, выход первого тригге0 ра 10 соединен с управляющим входом вы- числителя 22. Второй вход второго триггера 11, второй R-вход первого триггера 10, установочные входы первого и второго счетчиков 4, 5 и второй установочный
5 вход третьего счетчика 6 подключены к входу установки устройства в исходное состояние.
Устройство по предлагаемому способу работает следующим образом,
0 При движении объекта по траектории движения он последовательно подходит к датчикам 1, установленным вдоль траектории его движения. В первоначальный момент времени мультиплексор 2 подключен
5 к первому датчику 1 (мультиплексор 3 не подключает датчики к своему выходу) и устройство анализирует сигнал на максимум блоком выделения признака 12. После обнаружения первым блоком выделения при0 знака 12 максимума сигнала, этот импульс запускает генератор 7. и эталонные импульсы с его выхода поступают и накапливаются в счетчике 6. Этот же импульс, сформированный одновибратором 23 и задержанный
5 первым элементом задержки 8 задним фронтом включает второй триггер 11, который включает в свою очередь элемент И 21 на прохождение последующих импульсов на стробирующий вход вычислителя 22. Одновременно импульсом с выхода первого
блока выделения признака 12 переходит в следующее состояние второй счетчик 5 и обеспечивает подключение первого и второго датчика 2 на выход мультиплексора 3.
Блок выделения признака 13 выделяет нулевой уровень разностного сигнала от двух датчиков, который получается на выходе вычитателя 15. Одновременно эти сигналы суммируются, а разностный сигнал интегрируется интегратором 16 и поступают на входы делителя 17. Выходной сигйал делителя 17 поступает на вход элемента выборки и хранения 18.
При формировании вторым блоком выделения признака 13 импульса в элементе выборки и хранения 18 запоминается значение выходного напряжения делителя 17 и одновременно этот сигнал, пройдя через элемент ИЛИ 20, останавливает генератор импульсов 7, а триггер 10 переходит в единичное состояние и через время, задаваемое первым элементом задержки 8, проходит на вход стробиро- вания вычислителя 22. При этом в вычислитель 22 с выхода АЦП 19 и счетчика 6 поступают коды для определения скорости по формуле
VII
AS
2(Atii -d/S)
где d - интеграл разности сигналов,
S- их сумма,
AS - расстояние между датчиками.
После стробирования вычислителя 22 в исходное состояние сбрасывается счетчик 6 через время, задаваемое элементом 9. Далее по заднему фронту импульса на выходе элемента ИЛИ .20 включается опять генератор 7 для измерения последующего интервала времени. После того, как сработает первый блок выделения признака 12 опять остановится генератор 7, триггер 10 перейдет в нулевое состояние и при стробировании вычислителя 22 в него занесется новая информация с выходов счетчика 6 и запомненное значение с выхода АЦП 19. При этом вычислитель 22 рассчитает скорость по формуле
VQ
AS
2(Дш -d/S)/
Таким образом, в устройстве по пред- лагаемому способу осуществляется поправка, учитывающая задержку, которая возникает вследствие того, что при взаимодействии движущегося объекта и индуктивного датчика (а также любого датчика, обладающего инерционностью такого типа) возникает погрешность определения скорости вследствие задержек нарастания сигнала.
Формула из.обретения
Способ измерения скорости движения
проводника с током относительно равномерно распределенных вдоль траектории движения индуктивных датчиков с колоко- лообразным выходным сигналом, последовательно возмущаемых при движении
проводника с током, включающий измерение интенсивности возмущения объектом каждого датчика, сравнение сигналов датчиков путем определения разности сигналов 1-го и (i+1)-ro датчиков, фиксацию моментов
достижения равенства их сигналов по моменту наступления нулевогр значения указанной разности и максимума этой разности, измерение первого интервала времени A tn между моментом появления
1-го максимума разностного сигнала, соответствующего прохождению проводника с током 1-го датчика, и моментом достижения этим разностным сигналом нулевого значения, что соответствует нахождению
проводника с током посередине между 1-м и (1+1 )-м датчиками, после чего измеряют второй интервал времени Atia между упомянутым моментом достижения разностным сигналом нулевого значения и
моментом появления (1+1)-го максимума разностного сигнала, соответствующим прохождению проводника с током (1+1}-го датчика, формирование команды на отключение от измерительной схемы 1-го
датчика и одновременно подключение к ней (1+2)-го датчика, после чего выполнение аналогичных операций с 0+1)-м, (1+2)-м, (1+2)-м, (+3)-м датчиками и т.д., отличающийся тем, что, с целью
повышения точности измерения скорости за счет компенсации задержек, возникающих при измерении скорости, дополнительно определяют сумму сигналов от двух соседних датчиков, при этом интегрируют разность сигналов двух соседних датчиков, а скорость vi объекта на первой VM и второй vi2 половинах участка определяют как
AS vn 2 ( AIM-d/S)
AS Vl2 2(At,2 -d/SУ
где d - интеграл разности сигналов двух соседних датчиков:
S - сумма сигналов двух соседних датчиков; AS- расстояние между датчиками.
| Способ измерения скорости движения объекта | 1982 |
|
SU1068818A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
