Изобретение относится к области электротехники и машиностроения и может быть использовано в качестве безредукторного высокомоментного привода повышенной мощности.
Известен высокомоментный двигатель с пониженной частотой вращения ротора [патент US 4890024, кл. Н02K 37/00, оп. 26.12.1989], содержащий корпус, вал, магнитопровод ротора с высоким числом зубцов и статор с несколькими магнитными полюсами, на поверхности которых расположены зубцы с шагом, равным шагу зубцов ротора. Зубцы, установленные на смежных магнитных полюсах выбираются таким образом, чтобы отклонение зубцов ротора составляло половину шага и смежные полюса были разноименными.
Недостатком данного двигателя является низкая мощность при достаточно высоких массогабаритных показателях.
Известен многослойный шаговый электродвигатель [патент РФ №2321144, кл. Н02K 37/00, оп. 27.03.2008], содержащий корпус, вал, магнитопровод ротора с зубцами, пакет статора с многофазной обмоткой и с полюсами, имеющими зубцы, причем зубцы на соседних полюсах сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, чередующиеся коаксиальные полые цилиндры ротора и статора, состоящие из ферромагнитных и немагнитных элементов, расположенных вдоль оси вращения, причем цилиндры ротора механически связаны с магнитопроводом ротора, а цилиндры статора - с корпусом, при этом зубцы полюсов и ферромагнитные элементы цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы цилиндров ротора имеют свои угловые положения.
Недостатками данного двигателя являются сложность изготовления и сопряжения вспомогательных цилиндров статора и ротора, состоящих из ферромагнитных и немагнитных элементов, а также невысокая устойчивость к вибрационным воздействиям.
Известен бесщеточный двигатель с использованием структуры Вернье [ЕР 1402617 В1, кл. Н02K 29/03, оп. 31.03.2004], представляющий собой обращенную машину, содержащий ротор с попеременно намагниченными полюсами в направлении вращения и статор с множеством выступающих полюсов с катушками.
Недостатком такого двигателя является сложность конструкции, низкий коэффициент использования магнитного потока, высокая масса, открытые вращающиеся части, требующие дополнительного экранирования.
Наиболее близким аналогом к заявленному изобретению и принятым в качестве прототипа, является вентильный двигатель [патент РФ №2484573, кл. Н02K 29/00, оп. 10.06.2013], состоящий из n одинаковых модулей, каждый из которых содержит корпус, статор с фазными обмотками, ротор с постоянными магнитами, которые намагничены в радиальном направлении, одноименные фазные обмотки каждого модуля соединены последовательно, корпуса и роторы модулей механически соединены между собой, а каждый модуль содержит элементы круговой ориентации статора с фазными обмотками и ротора, при этом в каждом роторе одна половина магнитов смещена относительно другой половины в окружном направлении на половину зубцового деления статора tzs, а в смежных модулях одноименные магниты ротора смещены в окружном направлении на величину tzs/(2n).
Недостатком такого двигателя является отсутствие возможности работы на малых скоростях вращения ротора, а также необходимость применения специальных позиционирующих элементов.
Задачей изобретения является улучшение массогабаритных показателей, за счет увеличения числа модулей при сохранении постоянного диаметра модульной машины.
Технический результат: обеспечение высокой мощности и момента привода за счет увеличения числа модулей.
Поставленная задача решается, и технический результат достигается тем, что модульная машина, состоящая из N модулей, представляющих собой электрические двигатели, выполненные с использованием постоянных магнитов или короткозамкнутых обмоток роторов, согласно изобретению, содержит общий для всех модулей корпус, на котором установлены защитные щиты, роторы модулей, расположенные на общем валу, статоры модулей с фазными обмотками, каждая из которых подсоединена к соответствующему силовому электронному блоку управления с возможностью модуляции вращающих моментов модулей по гармоническому закону:

где М - амплитудное значение момента;
ω - частота вращения вала, рад/с;
ϕk - сдвиг фаз,
причем угол ϕk зависит от числа модулей N и определяется по формуле:
где k - номер модуля.
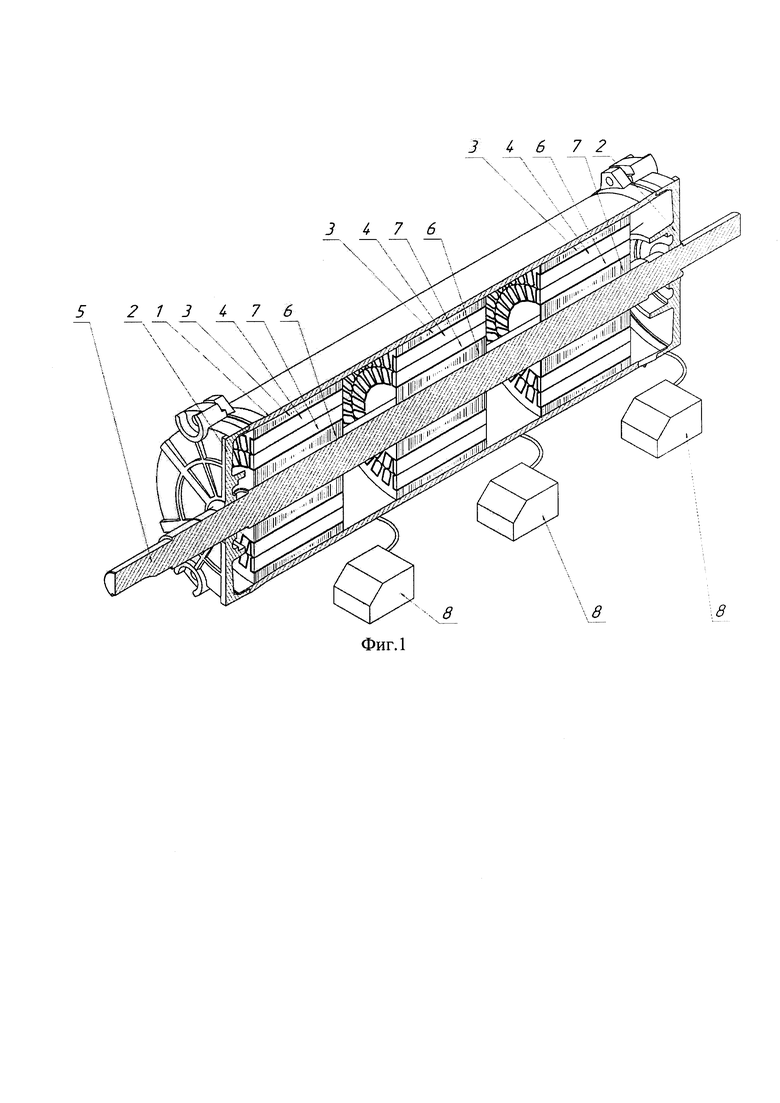
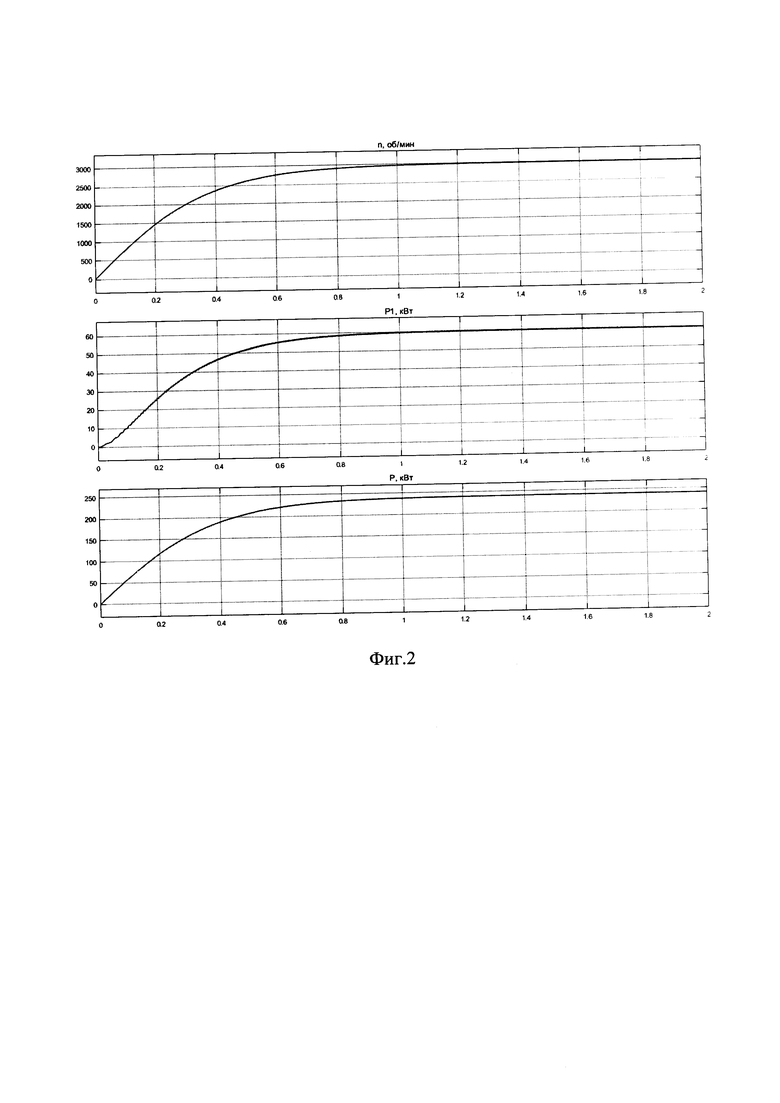
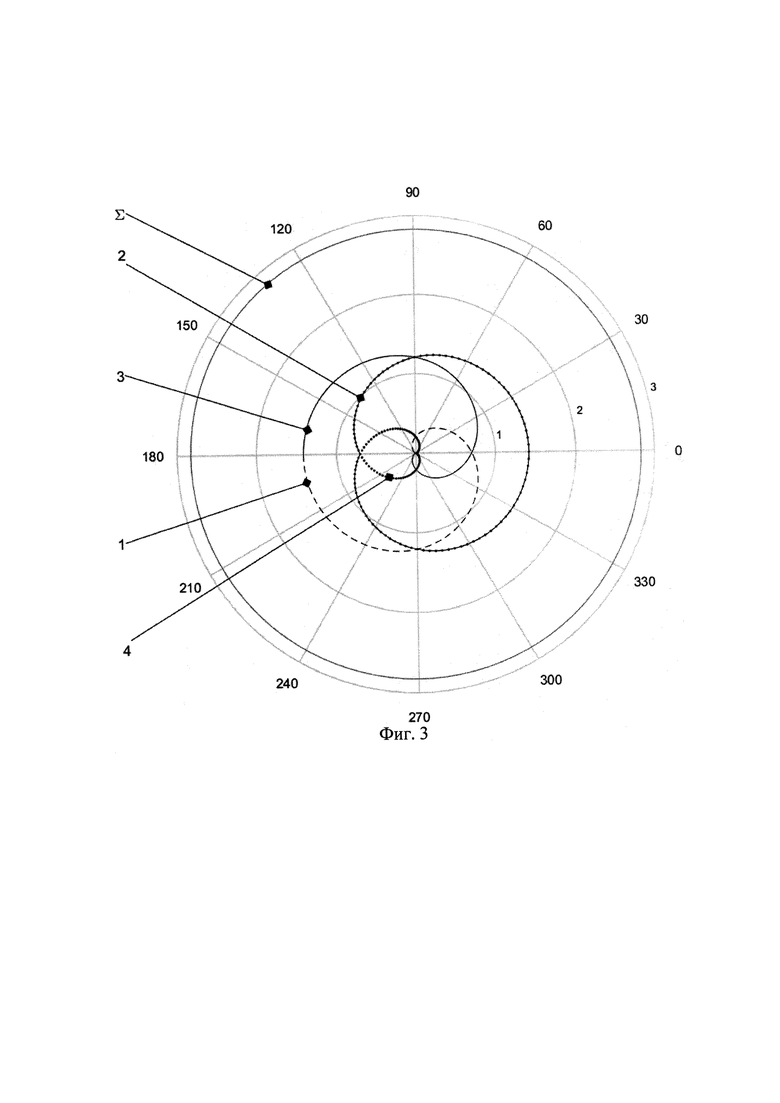
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена конструкция модульной машины безредукторного высокомоментного привода; на фиг. 2 представлены графики частоты вращения и механической мощности модульной машины для безредукторного высокомоментного привода, число модулей N=4, мощность одного модуля P1=60 кВт, частота тока питающего обмотки статора ƒ1=600 Гц, частота вращения вала модульной машины n=3000 об/мин; на фиг. 3 представлены траектории обобщенных векторов токов модульной машины для безредукторного высокомоментного привода ∑ и отдельных модулей 1-4.
Модульная машина для безредукторного высокомоментного привода содержит N модулей, представляющих собой отдельные электрические двигатели (фиг. 1). Модульная машина для безредукторного высокомоментного привода имеет общий корпус 1, на котором установлены защитные щиты 2. Внутри корпуса 1 расположены статоры модулей 3, содержащие фазные обмотки 4. На общем валу 5 расположены роторы модулей 6, с короткозамкнутыми обмотками роторов или постоянными магнитами 7. Роторы модульной машины могут быть выполнены как с использованием постоянных магнитов, так и с короткозамкнутой обмоткой. Каждая обмотка статора модуля подсоединена к соответствующему силовому электронному блоку управления 8 с возможностью модуляции вращающих моментов модулей.
Принцип работы модульной машины заключается в следующем: для обеспечения низкой частоты вращения вала, модули машины в совокупности работают как одна многополюсная машина. Таким образом силовые электронные блоки управления 8 каждого модуля модульной машины должны обеспечивать модуляцию момента и поддержание постоянного сдвига фаз моментов модулей между собой. В отличие от прототипа, где сдвиг фаз обеспечивается за счет позиционирующих элементов, в данной машине сдвиг фаз обеспечивается за счет управления током фазных обмоток 4 статоров 3. В зависимости от исполнения роторов модулей изменяются алгоритмы управления током в фазных обмотках 4 статоров 3 и изменяются выходные характеристики модульной машины.
Модуляция вращающих моментов каждого модуля осуществляется по закону:

где М - амплитудное значение момента;
ω - частота вращения вала, рад/с;
ϕk - сдвиг фаз.
Угол ϕk свой для каждой машины, и зависит от числа модулей N:
где k - номер модуля.
Особенность реализации модульной машины для безредукторного высокомоментного привода состоит в том, что каждая машина, входящая в электротехнический комплекс, при номинальной частоте тока в фазных обмотках 4 статора, работает при частоте вращения гораздо ниже той, с которой она работала бы отдельно при питании током синусоидальной формы (фиг. 2). При этом суммарная величина тока, а также момента модульной машины больше чем величины токов отдельных модулей (фиг. 3).
Итак, заявленное изобретение позволяет обеспечить увеличение мощности безредукторного высокомоментного привода за счет увеличения числа модулей и соответственно длины модульной машины, при этом внешний диаметр машины сохраняется неизменным. Модульная машина для безредукторного высокомоментного привода имеет низкую частоту вращения вала, высокую мощность и момент при невысокой массе, и не нуждается в использовании позиционирующих элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414794C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2011 |
|
RU2484573C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414793C1 |
| МНОГОФАЗНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2559197C2 |
| МОДУЛЬНАЯ СИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414039C1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414791C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ ГОРНОРУДНОЙ МЕЛЬНИЦЫ СИСТЕМЫ ПРЯМОГО ПРИВОДА | 2010 |
|
RU2417505C1 |
| НИЗКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОЛЬЦЕВЫМ СТАТОРОМ | 2009 |
|
RU2417506C2 |
Изобретение относится к области электротехники. Технический результат - обеспечение высокой мощности и момента привода. Модульная машина состоит из N модулей, представляющих собой электрические двигатели, выполненные с использованием постоянных магнитов или короткозамкнутых обмоток роторов, и содержит общий для всех модулей корпус, на котором установлены защитные щиты, роторы модулей, расположенные на общем валу, статоры модулей с фазными обмотками, каждая из которых подсоединена к соответствующему силовому электронному блоку управления с возможностью модуляции вращающих моментов модулей по гармоническому закону:  где М - амплитудное значение момента; ω - частота вращения вала, рад/с; ϕk - сдвиг фаз, причем угол ϕk зависит от числа модулей N и определяется по формуле:
где М - амплитудное значение момента; ω - частота вращения вала, рад/с; ϕk - сдвиг фаз, причем угол ϕk зависит от числа модулей N и определяется по формуле:  где k - номер модуля. 3 ил.
где k - номер модуля. 3 ил.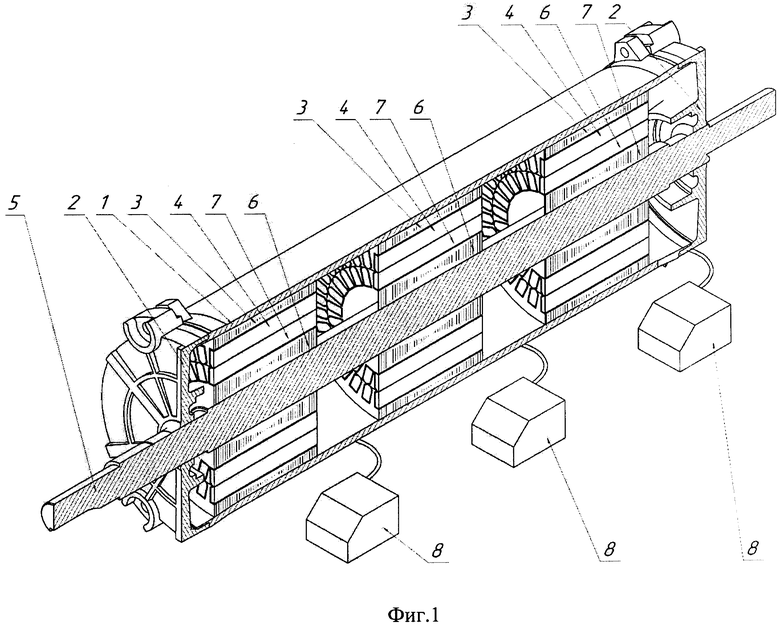
Модульная машина, состоящая из N модулей, представляющих собой электрические двигатели, выполненные с использованием постоянных магнитов или короткозамкнутых обмоток роторов, отличающаяся тем, что содержит общий для всех модулей корпус, на котором установлены защитные щиты, роторы модулей, расположенные на общем валу, статоры модулей с фазными обмотками, каждая из которых подсоединена к соответствующему силовому электронному блоку управления с возможностью модуляции вращающих моментов модулей по гармоническому закону:
где М - амплитудное значение момента;
ω - частота вращения вала, рад/с;
ϕk - сдвиг фаз,
причем угол ϕk зависит от числа модулей N и определяется по формуле:
где k - номер модуля.
| US 2007296281 A1, 27.12.2007 | |||
| СТАТОР ЭЛЕКТРИЧЕСКОЙ МАШИНЫ С ЖИДКОСТНЫМ ОХЛАЖДЕНИЕМ ПРОТОЧНЫМ ХЛАДАГЕНТОМ | 2013 |
|
RU2546964C1 |
| Асинхронный электродвигатель | 1987 |
|
SU1453533A1 |
| ЭЛЕКТРОПРИВОД КУЗНЕЦОВА | 1992 |
|
RU2075813C1 |
| RU 2012105091 A, 20.08.2013. | |||

