ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение относится к автоматизированным системам и способам сборки.
УРОВЕНЬ ТЕХНИКИ
[002] Сборка воздушного летательного аппарата включает в себя подгонку друг к другу большого количества сложных и часто крупных компонентов в точные относительные положения. Например, крылья и хвостовые стабилизаторы (например, вертикальный стабилизатор, горизонтальный стабилизатор) можно по существу полностью собрать и затем присоединить к соответствующей секции корпуса воздушного летательного аппарата. В качестве другого примера фюзеляж воздушного летательного аппарата может представлять собой комбинацию нескольких узлов корпуса, когда каждый узел корпуса может представлять собой отсек фюзеляжа цилиндрической формы. Некоторые компоненты, включая некоторые очень большие компоненты, например, крылья, отсеки фюзеляжа и узел хвостового оперения, выполнены с возможностью высокоточной сборки, например, с относительными позиционными допусками между частями менее 0,05 дюйма (приблизительно 1 миллиметра (мм)).
[003] Чтобы обеспечить необходимую взаимную подгонку с соответствующей точностью, положения компонентов обычно проверяют в точках на пути к положению окончательной подгонки. Например, при подгонке узла крыла к соответствующему узлу корпуса воздушного летательного аппарата, узел крыла можно последовательно передвигать в местоположения и относительные положения крыла и узла корпуса можно проверять для определения того, состоялся ли контакт узлов друг с другом. Проверка может быть визуальной, в случае если сборные компоненты достаточно разделены. Когда сборные элементы приближаются к конечному положению, при проверке может потребоваться применение ручных измерительных щупов или электронных контактных датчиков вокруг сопрягаемых границ контакта для определения достаточного просвета. Такие процессы могут быть очень трудоемкими и занимать много времени, чтобы обеспечить жесткие допуски, необходимые для ответственных компонентов.
[004] Регулировочные прокладки широко используются в авиастроении для подгонки и соединения больших компонентов друг с другом. Регулировочные прокладки, также называемые заполнителями, используют для заполнения зазоров (или пустот) между соединяемыми частями. Зазоры могут быть проектными зазорами, которые выполняют с возможностью учета допусков изготовления, выравнивания компонентов и надлежащей аэродинамической сборки воздушного летательного аппарата. Использование регулировочных прокладок для заполнения зазоров между сопрягаемыми частями имеет в результате конструктивно более прочный и собранный с более высокой точностью воздушный летательный аппарат.
[005] Регулировочные прокладки обычно изготавливают по индивидуальным размерам для зазоров, образуемых между деталями. Измерение, подготовка и установка регулировочных прокладок может быть трудоемким процессом, занимающим много времени. В ряде случаев некоторые регулировочные прокладки могут быть сформированы заранее в соответствии с предполагаемыми зазорами в процессе, называемом прогнозным регулированием прокладками. Если фактический зазор, образованный соединяемыми частями, не такой, как предполагаемый зазор (например, если части размещены неточно), предварительно сформированную регулировочную прокладку необходимо изменить или заменить способом, аналогичным ручному регулированию прокладками.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[006] Раскрытые способы присоединения крыла к корпусу включают в себя подачу команды на приведение узла крыла воздушного летательного аппарата в первое заданное положение и последующее итеративное повторение перемещения первого этапа. Перемещение первого этапа включает в себя определение положения узла крыла на первом этапе при помощи автоматического измерения пространственных местоположений множества меток на узле крыла, вычисление разности между положением на первом этапе и первым заданным положением и подачу команды узлу крыла на уменьшение величины разности на первом этапе. Итеративное повторение перемещения первого этапа выполняют до тех пор, пока разность на первом этапе не будет меньше или равной допустимой ошибке на первом этапе. Такие способы дополнительно включают в себя подачу команды на приведение узла крыла во второе заданное положение и последующее итеративное повторение перемещения на втором этапе. Перемещение на втором этапе включает в себя определение положения узла крыла на втором этапе при помощи автоматического измерения пространственных местоположений множества меток на узле крыла, определение положения узла корпуса на втором этапе при помощи автоматического измерения пространственных местоположений множества меток на узле корпуса, вычисление относительного положения на втором этапе на основе разности между положением узла крыла на втором этапе и положением узла корпуса на втором этапе, вычисление разности на втором этапе между относительным положением на втором этапе и заданным относительным положением на втором этапе и подачу команды узлу крыла уменьшить величину разности на втором этапе. Итеративное повторение перемещения на втором этапе выполняют до тех пор, пока величина разности на втором этапе не будет меньше или равной допустимой ошибке на втором этапе.
[007] Некоторые варианты осуществления включают в себя выполнение шагов второго этапа (например, подачу команды на приведение во второе заданное положение и последующее итеративное повторение перемещения на втором этапе) без выполнения шагов первого этапа. Некоторые варианты осуществления включают в себя выполнение передвижения слева по борту узла левого крыла воздушного летательного аппарата и выполнение передвижения справа по борту узла правого крыла воздушного летательного аппарата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] На ФИГ. 1 представлено схематическое описание способов присоединения крыла к корпусу согласно настоящему раскрытию.
[009] На ФИГ. 2 представлено схематическое описание способов перемещения первого этапа.
[0010] На ФИГ. 3 представлено схематическое описание способов перемещения на втором этапе.
[0011] На ФИГ. 4 представлено схематическое описание способов определения местоположений контрольных меток.
[0012] На ФИГ. 5 показан пример системы присоединения крыла к корпусу с крыльями, отделенными от воздушного летательного аппарата перед сборкой.
[0013] На ФИГ. 6 показаны крыло и корпус в начальном положении, демонстрирующие детали центроплана в перспективе.
[0014] На ФИГ. 7 показаны крыло и корпус в начальном положении на ФИГ. 6, демонстрирующие детали корневой части крыла в перспективе.
[0015] На ФИГ. 8 показан узел корпуса с примерами первичных меток корпуса и вторичных меток корпуса.
[0016] На ФИГ. 9 показана корневая часть крыла с примерами первичных меток крыла.
[0017] На ФИГ. 10 показано узел крыла с примерами местоположения вторичных меток крыла.
[0018] На ФИГ. 11 показано крыло и корпус на ФИГ. 6-7 в промежуточном положении.
[0019] На ФИГ. 12 показано крыло и корпус на ФИГ. 6-7 в конечном положении с крылом, сопряженным с корпусом.
[0020] На ФИГ. 13 схематически показано поперечное сечение корневой части крыла и центроплана, соединенных посредством регулировочных прокладок.
ОПИСАНИЕ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0021] Способы присоединения крыла к корпусу и системы согласно настоящему раскрытию позволяют осуществлять быструю и более надежную сборку крыла с корпусом воздушного летательного аппарата и сборку других больших конструкций. Способы включают в себя измерение 3D (пространственного) местоположения оптических меток на границах контакта, подлежащих соединению (например, корневой части крыла и центроплана воздушного летательного аппарата), и использование данных местоположений для отслеживания положений крыла и корпуса. Местоположения оптических меток на фактически выполненных границах контакта можно определять путем сканирования границ контакта с целью получения профилей поверхности границ контакта для идентификации оптических меток. Крыло можно передвигать к корпусу по меньшей мере в два этапа по последовательности точек траектории. На первом этапе крыло и корпус находятся настолько далеко друг от друга, что возможного контакта между компонентами можно избежать. Положение крыла в каждой точке траектории определяют посредством измерения меток на крыле. Ошибки фактического положения по сравнением с требуемым положением исправляют путем перемещения крыла в цикле с обратной связью. На втором этапе крыло находится достаточно близко к корпусу, чтобы существовала возможность контакта. Для каждой точки траектории относительное положение крыла и корпуса определяют путем измерения меток на крыле и корпусе. Ошибки фактического относительного положения от требуемого относительного положения корректируют, передвигая крыло относительно корпуса в цикле с обратной связью.
[0022] Описанный процесс с обратной связью с последовательностью точек траектории позволяет осуществить точное перемещение крыла к корпусу (передвижение большой конструкции(й) по точному пути перемещения) и точно разместить крыло относительно корпуса для окончательной сборки крыла с корпусом. Точность перемещения и/или размещения может быть достигнута даже при использовании системы позиционирования, имеющей низкую точность. Благодаря высокой точности последовательности точек траектории, необходимость в ручной проверке системы крыло-корпус, когда крыло сопряжено с корпусом для выполнения окончательной сборки, может быть уменьшена или практически исключена, тем самым уменьшая продолжительность сборки. Дополнительно или в качестве альтернативы, высокая точность обеспечивает возможность более точного и/или экстенсивного прогнозного регулирования прокладками.
[0023] Хотя примеры в данном раскрытии могут относиться к воздушному летательному аппарату и/или компонентам воздушного летательного аппарата, системы и способы данного раскрытия можно использовать для других конструкций и других компонентов. Например, системы и способы настоящего раскрытия можно использовать для транспортных средств, механического оборудования и больших конструкций. Системы и способы могут быть связаны со сборкой автомобилей, судостроением, сборкой космических аппаратов и/или строительством зданий.
[0024] На ФИГ. 1-13 проиллюстрированы способы и системы присоединения крыла к корпусу. Как правило, на чертежах элементы, включенные в состав данного варианта осуществления, показаны сплошными линиями, в то время как необязательные или альтернативные элементы показаны пунктирными линиями. Однако, элементы, показанные сплошными линиями, не являются существенными для всех вариантов осуществления настоящего раскрытия, и элемент, показанный сплошными линиями, может быть опущен из конкретного варианта осуществления без отхода от объема настоящего раскрытия. Элементы, которые имеют аналогичное, или по меньшей мере по существу аналогичное назначение, отмечены цифрами, которые согласуются на фигурах. Подобные цифры на каждой из фигур, а также соответствующие элементы, могут подробно не рассматриваться со ссылкой на каждую из фигур. Аналогичным образом, не все элементы могут быть обозначены или показаны на каждой из фигур, но ссылочные позиции, связанные с ними, могут использоваться для единообразия. Элементы, компоненты и/или признаки, обсуждаемые со ссылкой на одну или несколько фигур, могут быть включены в состав и/или использованы с любой из фигур, не отступая от сущности и объема настоящего раскрытия.
[0025] На ФИГ. 1 представлено схематическое описание способов 100 присоединения крыла к корпусу. Способы 100 могут включать в себя передвижение 110 крыла к по меньшей мере одной точке траектории первого этапа (положению крыла) и последующее передвижение 120 крыла к по меньшей мере одной точке траектории второго этапа (относительному положению крыла и корпуса). Что касается первого и второго этапа, способы 100 могут включать в себя один или оба этапа. Например, способы 100 могут включать в себя передвижение 110 к точке(ам) траектории первого этапа, передвижение 120 к точке(ам) траектории первого этапа или передвижение 110 к точке(ам) траектории первого этапа и последующее передвижение 120 к точке(ам) траектории второго этапа. Способы 100 могут включать в себя определение 130 местоположений контрольных меток для оптических меток на крыле и/или корпусе. На ФИГ. 2-4 подробно описаны различные аспекты способов 100.
[0026] На ФИГ. 5 представлен пример системы 10 присоединения крыла к корпусу для воздушного летательного аппарата 12. Система присоединения крыла к корпусу 10 может быть выполнена с возможностью, адаптирована и/или запрограммирована для выполнения одного или более шагов способов 100 и/или может использоваться со способами 100. Система 10 выполнена с возможностью выравнивать и осуществлять сборку крыла 14 с корпусом 16 (например, с отсеком 18 корпуса 16) воздушного летательного аппарата 12. Крыло 14 (которое может упоминаться как узел крыла) может быть полностью собранным, по существу полностью собранным и/или частично собранным крылом воздушного летательного аппарата. Как показано на ФИГ. 5 воздушный летательный аппарат 12 обычно имеет два или более крыльев 14. Корпус 16 (который может упоминаться как узел корпуса) может быть полностью собранным, по существу полностью собранным и/или частично собранным корпусом воздушного летательного аппарата и/или отсеком фюзеляжа.
[0027] Способы 100 могут быть применимы для присоединения одного крыла 14, обоих крыльев 14 (например, левого и правого крыла) и/или всех крыльев 14. При присоединении более одного крыла 14, крылья 14 можно присоединять к корпусу 16 последовательно, по меньшей мере частично одновременно и/или одновременно.
[0028] Крыло 14 сопрягается с корпусом 16 в корневой части 20 крыла (крыла 14) и центроплана 30 (корпуса 16). Корневая часть 20 крыла и центроплан 30 являются границами контакта узла соединения крыла 14 и корпуса 16, соответственно. Корневая часть 20 крыла также может упоминаться как кессон крыла. Центроплан 30 также может упоминаться как кессон боковой части корпуса. Корпус 16 может включать в себя один центроплан 30 для каждого крыла 14 воздушного летательного аппарата 12. Например, корпус 16 может включать в себя левую сторону центроплана 30 для сопряжения с корневой частью 20 крыла левого крыла 14, и правую сторону центроплана 30 для сопряжения с корневой частью 20 крыла правого крыла 14.
[0029] При использовании в настоящем документе ссылки на направления и повороты используют терминологию авиастроительной отрасли. Система координат воздушного летательного аппарата 12 показана на ФИГ. 5, где ось x указывает в продольно-поперечном направлении, ось y указывает в левом-правом направлении и ось z указывает в направлении вверх-вниз. Применительно к воздушному летательному аппарату 12 координаты x, y и z могут быть также названы шпангоутом (или шпангоутом фюзеляжа), батоксом и ватерлинией, соответственно. Каждая конструкция может размещаться в трех измерениях и иметь пространственную угловую ориентацию. Местоположение и ориентация совместно могут упоминаться как «положение». Таким образом, положение может описывать пространственный аспект конструкции, включая в себя три степени свободы поступательного перемещения и три степени свободы угловой ориентации. В отношении воздушного летательного аппарата 12 поворот вокруг оси x упоминается как поворот вокруг продольной оси; поворот вокруг оси y упоминается как поворот вокруг поперечной оси, и поворот вокруг оси z упоминается как поворот вокруг вертикальной оси. Положение каждой конструкции может быть задано относительно локальных координат по отношению к конструкции, а не к воздушному летательному аппарату 12. Например, каждое крыло 14 может иметь ориентацию, заданную относительно локальных координат с началом на границе контакта корневой части крыла и центроплана. Ориентация крыла 14 относительно корпуса 16 может упоминаться как угол поперечного крыла V (поворот вокруг локальной оси, параллельной оси x), угол атаки (поворот вокруг локальной оси, параллельной оси y, также называемой осью вращения поворотного крыла) и угол стреловидности (поворот вокруг локальной оси, параллельной оси z, также называемой срезом крыла).
[0030] Каждая из корневых частей 20 крыла и центроплан 30 имеют сопрягаемые конструкции, например, фланцы, панели, оборудование, рамы, лонжероны, гребни, пазы, штифты, отверстия и т.д., которые выполнены с возможностью сопряжения друг с другом. Сопрягаемые конструкции сопрягают с соответствующими конструкциями противоположной корневой части 20 крыла или центроплана 30. Поверхностями, которые стыкуются друг с другом, являются сопрягаемые поверхности 22 корневой части крыла (корневой части 20 крыла) и сопрягаемые поверхности 32 центроплана (центроплана 30). Обычно подгонку крыла 14 к корпусу 16 выполняют по аналогии с вилкой и розеткой, так что сопрягаемые поверхности на обоих, корневой части 20 крыла и центроплане 30, обращены в различных направлениях (например, вверх, вниз, вперед, назад, внутрь и/или наружу). Например, сопрягаемые поверхности сопрягаемого листа, проходящего от корневой части 20 крыла, может включать в себя поверхность, обращенную вверх, и поверхность, обращенную вниз. Сопрягаемые конструкции центроплана 30 могут включать в себя соответствующие поверхности, обращенные вниз, и поверхности, обращенные вверх. Сопрягаемые поверхности не обязательно входят в контакт друг с другом при сопряжении. Сопрягаемые поверхности при сопряжении могут образовать зазор. Обычно сопрягаемые поверхности 22 корневой части крыла и сопрягаемые поверхности 32 центроплана выполнены с возможностью сопряжения при высокоточном совмещении. Следовательно, любой контакт, если он имеет место, может представлять собой плотную подгонку (например, подгонку с натягом или скользящую подгонку) и любой зазор, если он присутствует, может быть небольшим (например, расстояние менее 5 мм (приблизительно 0,2 дюйма), менее 1 мм (приблизительно 0,04 дюйма.), менее 0,2 мм (приблизительно 0,008 дюйма) или менее 0,1 мм (приблизительно 0,004 дюйма.)). Как обсуждалось в данном документе, зазоры, в частности, зазоры с расстоянием больше заранее определенной пороговой толщины, можно заполнять регулировочными прокладками.
[0031] Корневая часть 20 крыла и центроплан 30 могут быть относительно большими конструкциями и иметь относительно большие площади поперечного сечения (измеренные в гипотетической плоскости, которая разделяет соединение). Корневая часть 20 крыла и центроплан 30 могут иметь по существу одинаковые размеры поперечного сечения. Вылет корневой части 20 крыла и центроплана 30 (каждого по отдельности) в направлении оси x может составлять более 1 м (метра) (приблизительно 3 футов), более 2 м (приблизительно 7 футов), более 4 м (приблизительно 13 футов.), менее 20 м (приблизительно 66 футов) и/или менее 10 м (приблизительно 33 футов). Вылет корневой части 20 крыла и центроплана 30 (каждого по отдельности) в направлении оси y может составлять более 0,3 м (приблизительно 1 фута), более 0,6 м (приблизительно 2 футов), более 1 м (приблизительно 3 футов), менее 10 м (приблизительно 33 футов) и/или менее 5 м (приблизительно 16 футов.). Корневая часть 20 крыла и центроплан 30 каждый в отдельности независимо друг от друга могут иметь площадь поперечного сечения (в плоскости стыка) более 1 м2 (квадратного метра) (приблизительно 10 кв. футов), более 2 м2 (приблизительно 20 кв. футов), более 10 м2 (приблизительно 100 кв. футов), более 20 м2 (приблизительно 200 кв. футов), менее 100 м2 (приблизительно 1000 кв. футов) и/или менее 20 м2 (приблизительно 200 кв. футов).
[0032] Хотя примеры в данном документе сосредоточены на присоединении крыла к корпусу воздушного летательного аппарата, системы и способы настоящего раскрытия можно применять для выравнивания и сборки других больших и/или сложных компонентов, например, в случае воздушного летательного аппарата, присоединения хвостовых стабилизаторов к узлу хвостового оперения и/или к фюзеляжу, и присоединения отсеков фюзеляжа друг к другу. Таким образом, ссылки на крылья и корпуса воздушного летательного аппарата можно заменить ссылками на первую сопрягаемую конструкцию (или сборочную группу) и вторую сопрягаемую конструкцию (или сборочную группу). Сопрягаемые конструкции имеют границы контакта (соответствующие корневой части 20 крыла и центроплану 30) и сопрягаемые поверхности на границах контакта (соответствующие сопрягаемым поверхностям 22 корневой части крыла и сопрягаемым поверхностям 32 центроплана). Системы и способы настоящего раскрытия можно применять к сопрягаемым конструкциям для соединения границ контакта друг с другом с точным совмещением соответствующих сопрягаемых поверхностей.
[0033] Во время выравнивания и сборки, крыло 14 можно поддерживать и/или позиционировать при помощи одного или более устройств 62 для позиционирования крыла, а корпус 16 можно поддерживать и/или позиционировать при помощи одного или более устройств 60 для позиционирования корпуса. Каждое крыло 14 можно поддерживать и/или позиционировать при помощи независимой группы, состоящей из одного или более устройств 62 для позиционирования крыла. Устройства 62 для позиционирования крыла и устройства 60 для позиционирования корпуса также могут упоминаться как инструменты для присоединения крыла и инструменты для присоединения корпуса, соответственно. Устройства 62 для позиционирования крыла и устройства 60 для позиционирования корпуса могут быть выполнены с возможностью управлять положением (то есть, ориентацией и/или местоположением) соответствующего крыла 14 и корпуса 16. Группа устройств 62 для позиционирования крыла для крыла 14 и устройств 60 для позиционирования корпуса может упоминаться как система 58 позиционирования крыла. Система 10 может включать в себя систему 58 позиционирования крыла для каждого крыла 14 (по необходимости совместно, используя устройство 60 для позиционирования корпуса для каждой системы 58 позиционирования крыла) и/или может включать в себя систему 58 позиционирования крыла для всех крыльев 14. В основном устройства 62 для позиционирования крыла и устройства 60 для позиционирования корпуса системы 58 позиционирования крыла выполняют с возможностью передвижения крыла 14 относительно корпуса 16 с по меньшей мере шестью степенями свободы (три поступательные и три вращательные). Степени свободы можно разделить между устройствами 62 для позиционирования крыла и устройствами 60 для позиционирования корпуса. Дополнительно или в качестве альтернативы устройства 62 для позиционирования крыла и устройства 60 для позиционирования корпуса могут иметь возможность совершать одинаковый тип движения (например, оба с возможностью перемещения соответствующего крыла 14 и корпуса 16 в направлении оси x). В основном устройства 62 для позиционирования крыла в виде группы выполнены с возможностью перемещения соответствующего крыла 14 относительно корпуса 16 с по меньшей мере четырьмя степенями свободы, тремя вращательными степенями и одной поступательной степенью вдоль оси y (направление влево-вправо, внутрь-наружу). Например, на ФИГ. 5, левое крыло 14 поддерживается одним устройством 62 для позиционирования крыла, выполненным с возможностью передвигать левое крыло 14 относительно корпуса 16 с шестью степенями свободы (три поступательные и три вращательные).
[0034] Устройства 62 для позиционирования крыла и/или устройства 60 для позиционирования корпуса могут включать в себя домкраты, приводные механизмы, подъемные устройства, двигатели, колеса, гусеницы и/или средства передвижения. Устройства 62 для позиционирования крыла и/или устройства 60 для позиционирования корпуса можно приводить в действие при помощи внутренних или наружных источников посредством, например, электричества, гидравлического давления и/или пневматического давления. Устройства 62 для позиционирования крыла и/или устройства 60 для позиционирования корпуса могут быть самоходными и/или могут упоминаться как транспортные средства. Устройства 62 для позиционирования крыла, устройства 60 для позиционирования корпуса и/или системы 58 позиционирования крыла могут включать в себя электронный контроллер и могут упоминаться как роботизированные и/или управляемые компьютером устройства и/или системы позиционирования. Устройства 62 для позиционирования крыла, устройства 60 для позиционирования корпуса и/или системы 58 позиционирования крыла могут, в конечном счете, управляться оператором (например, при помощи пульта дистанционного управления) и/или могут работать автономно и/или полу-автономно (например, следуя способам выравнивания и/или позиционирования, описанным в данном документе).
[0035] Возвращаясь в основном к ФИГ. 1 (в отношении способов) и ФИГ. 5 (в отношении конструкций), передвижение 110 к точке(ам) траектории первого этапа и передвижение 120 к точке(ам) траектории второго этапа включает в себя определение положения крыла 14 и может включать в себя определение положение корпуса 16. Положения крыла 14 и корпуса 16 можно задавать при помощи оптических меток, установленных на соответствующем крыле 14 и корпусе 16. Оптические метки в основном представляют собой оптически четкие объекты и могут включать в себя (и/или могут быть) отражателем, ретроотражателем, символом, и/или маркировкой, которая является оптически отчетливой (например, выделяется на соседнем оптическом фоне). Оптические метки могут включать в себя отражающие материалы, абсорбирующие материалы, флуоресцентные материалы и/или люминесцентные материалы. Оптические метки могут упоминаться как ретроотражающие метки, отражающие метки, кодированные метки (например, включающие в себя штрихкоды, 2D (двухмерные) штрихкоды, алфавитно-цифровые символы и/или другие символы), флуоресцентные метки и/или люминесцентные метки. Оптические метки могут быть приспособлены для фотограмметрии, лазерного слежения или других оптических методов. Например, оптические метки могут реагировать на искусственное освещение и или естественное освещение (например, за счет отражения, поглощения, рассеивания и/или флуоресцирования). Оптические метки также могут упоминаться как метки, фотограмметрические метки и/или метки для лазерного слежения.
[0036] На ФИГ. 5 оптические метки показаны в виде первичных меток 50 и вторичных меток 54. Первичные метки 50 представляют собой оптические метки, расположенные на или в корневой части 20 крыла или центроплана 30. Поскольку первичные метки 50 находятся на или в корневой части 20 крыла или центроплана 30, оптический доступ к первичным меткам 50 может быть закрыт, когда крыло 14 и корпус 16 сводят вместе для присоединения крыла 14 к корпусу 16. Вторичные метки 54 представляют собой оптические метки, связанные с крылом 14 или корпусом 16 и соответствующими первичными метками 50. Вторичные метки 54 расположены, чтобы разрешить оптический доступ во время процесса присоединения крыла, по меньшей мере на том участке процесса, в котором первичные метки 50 закрыты, отсутствуют или по иной причине недоступны.
[0037] Первичные метки 50 находятся в местоположениях, известных относительно соответствующих сопрягаемых поверхностей 22 корневой части крыла и сопрягаемых поверхностей 32 центроплана. Например, первичные метки 50 можно устанавливать в заданных местоположениях, например, реперных точках или контрольных точках, используемых во время проектирования и/или конструирования соответствующей корневой части 20 крыла и центроплана 30. Дополнительно или в качестве альтернативы, местоположения одной или более первичных меток 50 можно задавать посредством измерения (например, оптического и/или автоматического) 3D местоположения метки относительно соответствующей корневой части 20 крыла, центроплана 30 или соответствующих поверхностей. Геометрия поверхности сопрягаемых поверхностей 22 корневой части крыла и/или сопрягаемых поверхностей 32 центроплана может быть известна из запроектированных моделей (запроектированных форм) и/или из моделей поверхностей, полученных путем сканирования поверхности (фактически выполненных форм). 3D местоположения меток на соответствующей сопрягаемой поверхности можно измерять при помощи лазерного трекера, лазерного дальномера, системы ЛИДАР (лазерная система обнаружения и измерения дальности) и/или фотограмметрической системы. 3D местоположения меток можно определять при помощи сканирования первичных меток 50 с соответствующей сопрягаемой поверхностью(ями).
[0038] Первичные метки 50 в основном распределены около корневой части 20 крыла и центроплана 30. Распределение (в противоположность кластеризации) первичных меток 50 около соответствующей границы может обеспечить больше вариантов положений для измерения (например, больше положений, в которых предельное количество первичных меток 50 является видимым) и/или лучшее 3D изображение положения соответствующей корневой части 20 крыла или центроплана 30. Обычно каждая из корневых частей 20 крыла и центроплан 30 могут иметь 2, 3, 4, 5, 6 или более первичных меток 50.
[0039] Вторичные метки 54 находятся в местоположениях, которые известны по отношению к первичным меткам 50 (то есть, к одной или более первичным меткам 50) соответствующей корневой части 20 крыла или центроплана 30. Местоположения вторичных меток 54 могут быть измерены по отношению к первичным меткам 50 и/или могут находиться в определенных взаимных расположениях с первичными метками 50. Например, местоположение одной или более вторичных меток 54 может быть определено при помощи измерения 3D местоположения вторичной метки 54 относительно одной или более соответствующих первичных меток 50. 3D местоположение можно измерять при помощи 3D измерительной системы 40 (например, лазерного трекера, лазерного дальномера, системы ЛИДАР и/или фотограмметрической системы). Одна или более вторичных меток 54 могут располагаться в заданных взаимных расположениях с первичными метками 50, например, если вторичная метка 54 и первичная метка 50 закреплены на рамке вместе, и рамка с метками установлена на соответствующем крыле 14 или корпусе 16.
[0040] Вторичные метки 54 в основном распределены по крылу 14 около корневой части 20 крыла и корпусу 16 около центроплана 30. Распределение (в противоположность кластеризации) вторичных меток 54 около соответствующего участка может обеспечить больше вариантов измерения положения (например, больше положений, в которых предельное количество вторичных меток 54 являются видимыми) и/или лучшее 3D изображение положения соответствующего крыла 14 или корпуса 16. Обычно каждое крыло 14 и корпус 16 может иметь 2, 3, 4, 5, 6 или более вторичных меток 54.
[0041] Способы 100 обычно включают в себя передвижение одного или более крыльев 14 к корпусу 16 в двухэтапном процессе с последовательностью точек траектории. Путь передвижения крыла 14 является 3D путем, по которому крыло 14 поступательно перемещают и/или поворачивают из начального положения в конечное положение, в котором крыло 14 сопрягается с корпусом 16. Путь перемещения проходит по последовательности точек траектории (промежуточным положениям), выполненной с возможностью переводить крыло 14 в его конечное положение без значительного контакта между крылом 14 и корпусом 16. Каждая точка траектории является положением крыла 14 относительно корпуса 16 или по меньшей мере относительно фиксированной системы координат, связанной с корпусом 16. В некоторых вариантах осуществления путь перемещения выполнен с возможностью не допускать контакта между частями во всех точках траектории, по меньшей мере до сопряжения в конечном положении. Начальное положение, которое может упоминаться как на отделенное положение, и конечное положение, которое может упоминаться как положение сопряжения, независимо друг от друга могут быть точками траектории.
[0042] Как показано на ФИГ. 1, способы 100 могут включать в себя определение 106 пути перемещения для совместного передвижения крыла 14 и корпуса 16 в положение сопряжения. Путь перемещения выполнен с возможностью передвижения крыла 14 и корпуса 16 в совмещенное положение и размещения крыла 14 и корпуса 16 в конечном положении сопряжения. Отчасти из-за сложности сопрягаемых поверхностей 22 корневой части крыла, сложности сопрягаемых поверхностей 32 центроплана и требуемой точности, путь перемещения крылья 14 к корпусам 16 обычно включает в себя более простое линейное перемещение в одном направлении. Например, путь перемещения может включать в себя сегменты вращения, сегменты поступательного перемещения, сегменты связанного вращения (например, вращения вокруг более чем одной оси), сегменты связанного поступательного перемещения (например, поступательного перемещения вдоль более чем одной оси) и/или сегменты связанного поступательного перемещения и вращения. Что касается пути перемещения, сегмент является участком пути перемещения между двумя точками траектории. Сегмент пути перемещения может включать в себя одну или более точек траектории.
[0043] Определение 106 пути перемещения может включать в себя расчет пути перемещения на основе запроектированных рассчитанных форм крыла 14 и корпуса 16. Дополнительно или в качестве альтернативы, определение 106 пути перемещения может основываться на действительных реальных или истинных, фактически выполненных формах крыла 14 и корпуса 16. Действительные формы могут быть смоделированы (например, путем выполнения 3D сканирования, как обсуждалось в отношении сопрягаемых поверхностей и виртуальной подгонки) и могут содержать отклонения отдельных частей от инженерного проекта. В некоторых вариантах осуществления предварительный путь перемещения определяют на основе рассчитанных форм частей и затем изменяют в соответствии с действительными, измеренными формами части с целью получения пути перемещения. Каждая точка траектории пути перемещения может быть независимо передвинута от соответствующей точки траектории предварительного пути перемещения. Такие перемещения могут быть простыми поступательными перемещениями, но чаще всего перемещения могут включать в себя поступательные перемещения и вращения, которые могут привести к новой форме пути и/или другим ориентациям части.
[0044] Конечное положение сопряжения крыла 14 и корпуса 16 можно определять при помощи виртуальной подгонки. Например, способы 100 могут включать в себя виртуальную подгонку 180 крыла 14 к корпусу 16 для установления виртуальной подгонки. Виртуальная подгонка 180 включает в себя использование виртуальных моделей (спроектированных и/или фактически выполненных моделей) корневой части 20 крыла и центроплана 30 и выравнивание виртуальных моделей при виртуальной подгонке. Виртуальная подгонка может основываться на техническом проекте, спроектированных и/или фактически выполненных частях и/или аэродинамических соображениях. Фактически запроектированные модели частей могут упоминаться как технические модели и могут быть представлены в виде модели САПР (системы автоматизированного проектирования) или других 3D изображений. Фактически выполненные модели могут быть моделями САПР или другими 3D изображениями, полученными из 3D сканированных поверхностей, которые будут сопрягаться (например, сопрягаемые поверхности 22 корневой части крыла и сопрягаемые поверхности 32 центроплана). Например, сопрягаемые поверхности 22 корневой части крыла и/или сопрягаемые поверхности 32 центроплана могут быть отсканированы (например, с помощью 3D сканирования поверхности) для определения действительных, фактически выполненных форм поверхностей (также упоминаемых как профили поверхности). Сканирование поверхности можно использовать для создания виртуальной модели фактически выполненных поверхностей, которые могут упоминаться как 3D профили поверхности. Сканирование частей позволяет в большей степени учитывать реальное, фактическое отклонение частей от запроектированных форм при виртуальной подгонке, чем инженерное моделирование частей.
[0045] Виртуальную подгонку можно выполнять с возможностью размещения крыла 14 в проектном аэродинамическом положении и достижения меньшей толщины зазоров между корневой частью 20 крыла и центропланом 30, чем предельная толщина. Конечное положение сопряжения может быть положением виртуальной подгонки, определенным при помощи виртуальной подгонки 180.
[0046] Виртуальная подгонка 180 может включать в себя идентификацию зазоров между корневой частью 20 крыла и центропланом 30. Дополнительно, виртуальную подгонку 180 можно использовать для определения и/или создания регулировочных прокладок для заполнения зазоров, обозначенную на ФИГ. 1 как регулирование прокладками 182. Регулирование прокладками 182, также называемое прогнозным регулированием прокладками 182, может включать в себя определение размеров прокладки для по существу заполнения одного или более зазоров, формирование регулировочных прокладок в соответствии с заданными размерами прокладок и/или установку регулировочных прокладок в соответствующих фактических зазорах, сформированных фактической подгонкой, обеспеченной за счет передвижения 110 к точке(ам) траектории на первом этапе и/или передвижения 120 к точке(ам) траектории на втором этапе. Регулирование прокладками 182 можно выполнять даже до приведения крыла 14 и корпуса 16 в совмещенное положение (например, регулировочными прокладками, сформированными до начала передвижения 110 и/или передвижения 120). Полученные регулировочные прокладки могут быть установлены на корневой части 20 крыла и/или центроплане 30 до начала передвижения 110 и/или передвижения 120.
[0047] Способы 100 могут быть выполнены с возможностью пошагового передвижения крыла 14 вдоль пути перемещения на одну точку траектории за один раз. Например, передвижения 110 к точке(ам) траектории первого этапа и/или передвижения 120 к точке(ам) траектории второго этапа. При помощи пошагового передвижения, отклонения действительных перемещений/положений крыла 14 и/или корпуса 16 можно идентифицировать и/или корректировать во время всего перемещения до того как отклонения станут большими. Отклонения перемещения могут быть обусловлены, например, прогибом частей, изгибом частей, неточностью системы 58 позиционирования крыла (ФИГ. 5) и/или погрешностью системы 58 позиционирования крыла.
[0048] Точки траектории между начальным положением и конечным положением сопряжения могут располагаться через неравные интервалы и обычно отстоят друг от друга с интервалами в убывающей последовательности, причем точки траектории первого этапа обычно отделены друг от друга большими расстояниями, чем точки траектории второго этапа. Например, минимальный интервал между последовательными точками траектории первого этапа (в некоторых случаях всеми интервалами первого этапа) может быть больше, чем минимальный интервал между последовательными точками траектории второго этапа (в некоторых случаях всеми интервалами второго этапа). Точки траектории обычно располагают на еще большем расстоянии друг от друга, если расстояние между крылом 14 и корпусом 16 больше, и/или если требования к точности относительного размещения ниже. Таким образом, точки траектории вблизи начального положения пути перемещения и/или точки траектории первого этапа, могут соответствовать грубому или приблизительному перемещению, а точки траектории вблизи конечного положения сопряжения пути перемещения и/или точки траектории второго этапа, могут соответствовать точному перемещению. Например, интервал между последовательными точками траектории первого этапа (например, первыми двумя точками траектории) может составлять менее 500 мм (приблизительно 20 дюймов), менее 200 мм (приблизительно 8 дюймов), менее 100 мм (приблизительно 4 дюймов), менее 50 мм (приблизительно 2 дюймов), более 10 мм (приблизительно 0,4 дюйма), более 20 мм (приблизительно 0,8 дюйма) и/или более 50 мм (приблизительно 2 дюймов). Интервал между последовательными точками траектории второго этапа (например, последними двумя точками траектории) может составлять менее 50 мм (приблизительно 2 дюймов), менее 10 мм (приблизительно 0,4 дюйма), менее 5 мм (приблизительно 0,2 дюйма), менее 2 мм (приблизительно 0,08 дюйма.), более 0,1 мм (приблизительно 0,004 дюйма.), более 0,5 мм (приблизительно 0,02 дюйма) и/или более 1 мм (приблизительно 0,04 дюйма).
[0049] На первом этапе процесса перемещения способы 100 включают в себя передвижение вдоль пути к одной или более точкам траектории. Как показано на ФИГ. 1, передвижение 110 к точке траектории первого этапа может включать в себя выполнение 112 перемещения первого этапа или подачу команды 114 на передвижения крыла 14 к выбранной точке траектории. Передвижение 110 можно повторять для каждой точки траектории первого этапа (если относительное положение крыла 14 и корпуса 16 разделены в достаточной степени, чтобы столкновения были маловероятны). Для по меньшей мере одной из точек траектории первого этапа передвижение 110 включает в себя выполнение 112 перемещения первого этапа. Подача команды 114 включает в себя подачу команды системе 58 позиционирования крыла (например, устройству(ам) 62 для позиционирования крыла и/или устройству(ам) 60 для позиционирования корпуса) на передвижение крыла 14 к выбранной точке траектории.
[0050] На ФИГ. 2 подробно описан процесс перемещения первого этапа. Выполнение 112 перемещения первого этапа включает в себя подачу команды 150 на передвижение крыла 14 в заданное положение. Обычно заданное положение является точкой траектории. Однако, заданное положение может быть выбранным, рассчитанным и/или оцененным положением для передвижения крыла 14 в необходимое направление и/или в необходимое положение (например, в точку траектории). Если подача команды 150 является просто подачей команды системе 58 позиционирования крыла на передвижение крыла 14 к выбранной точке траектории, то подача команды 150 является такой же, что и подача команды 114.
[0051] Выполнение 112 перемещения первого этапа включает в себя определение 152 положения крыла (например, положения корневой части 20 крыла) при помощи измерения 3D местоположения одной или более оптических меток (например, первичных меток 50 и/или вторичных меток 54). Измерение 3D местоположения одной или более оптических меток представляет собой измерение бесконтактным способом (например, оптическим), например, при помощи 3D измерительной системы 40. Измерение 3D местоположения обычно представляет собой автоматизированный процесс, такой как машинное зрение, оптическое 3D сканирование и/или фотограмметрия.
[0052] Машинное зрение представляет собой метод, использующий электронные средства получения изображений и алгоритмы для извлечения геометрической информации (например, положения и/или формы поверхности) из одного или более изображений исследуемого объекта (например, первичных меток 50 и/или вторичных меток 54, связанных с соответствующей корневой частью 20 крыла или центроплана 30). Например, машинное зрение можно использовать для определения положений первичных меток 50. В качестве другого примера, машинное зрение можно использовать для определения форм поверхности фактически выполненных сопрягаемых поверхностей 22 корневой части крыла. 3D оптическое сканирование (которое включает в себя такие методы, как лазерное отслеживание, ЛИДАР и лазерную локацию) представляет собой метод, который использует отражение света, обычно от лазера, для вычисления геометрии поверхности изучаемого объекта. Обычно геометрия поверхности вычисляется по времени прохождения или триангуляцией. Дополнительно или в качестве альтернативы, 3D оптическое сканирование может использоваться для измерения 3D положений объектов и, следовательно, относительного местоположения объекта на поверхности. Фотограмметрия представляет собой метод, который определяет геометрию поверхности изучаемого объекта на основе анализа электронных изображений, обычно нескольких изображений с разных точек наблюдения (под разными углами). При фотограмметрии можно использовать несколько камер с целью получения изображений с разных точек наблюдения. Дополнительно или в качестве альтернативы, фотограмметрию можно использовать для измерения 3D положений объектов и, следовательно, относительного местоположения объекта на поверхности.
[0053] Выполнение 112 включает в себя вычисление 154 разности на первом этапе (обозначенной как Δ1 на ФИГ. 2) между фактическим положением крыла (как определено путем определения 152) и заданным положением. Выполнение 112 дополнительно включает в себя итеративное повторение 156 подачи команды 150, определение 152 и вычисление 154 до тех пор, пока величина разности на первом этапе не будет меньше или равной допустимой ошибке на первом этапе (обозначенной T1 на ФИГ. 2). Таким образом, выполнение 112 перемещения первого этапа включает в себя выполнение группы команд 150, определение 152 и вычисление 154 один или более раз до тех пор, пока разность на первом этапе не будет достаточно малой. Подача команды 150, определение 152, вычисление 154 и повторение 156 формируют цикл с обратной связью для позиционирования крыла 14.
[0054] Первая подача команды 150 в повторном цикле на первом этапе может быть подачей команды системе 58 позиционирования крыла передвинуть крыло 14 в необходимую точку траектории (в заданное положение). Последующая подача команды 150 в повторном цикле (то есть, события команды 150, которые происходят после определения того, что разность на первом этапе больше допустимой ошибки на первом этапе) может быть подачей команды системе 58 позиционирования крыла на передвижение крыла 14 в соответствии с разностью на первом этапе. Например, последующие события команды 150 могут включать в себя подачу команды на уменьшение величины разности на первом этапе и/или подачу команды системе 58 позиционирования крыла на выполнение относительного выбранного, вычисленного и/или оцененного передвижения для передвижения крыла 14 в направлении уменьшения величины разности на первом этапе и/или в направлении к требуемой точке траектории.
[0055] Возвращаясь к ФИГ. 1, второй этап перемещения следует за первым этапом (при условии его выполнения), то есть передвижение 120 к одной или более точкам траектории второго этапа выполняют после завершения всех передвижений 110 к точке(ам) траектории первого этапа. Передвижение 120 к точке траектории второго этапа может включать в себя выполнение 122 перемещения на втором этапе или подачу команды 114 на передвижение крыла 20 в выбранную точку траектории. Передвижение 120 можно повторять для каждой точки траектории второго этапа (на котором относительное положение крыла 14 и корпуса 16 настолько близки, что возможно их столкновение или контакт). Для по меньшей мере одной из точек траектории второго этапа, передвижение 120 включает в себя выполнение 122 перемещения на втором этапе. Переход от первого этапа (например, передвижение 110) ко второму этапу (например, передвижение 120) может основываться на предельном расстоянии между крылом 14 и корпусом 16, предельном расстоянии между точками траектории, действительном (измеренном) расстоянии между крылом 14 и корпусом 16 (например, аналогично передвижению 110), разности между положением крыла 14 и точкой траектории (например, разности на первом этапе) и/или определенной точкой траектории.
[0056] На ФИГ. 3 подробно показан процесс перемещения на втором этапе. Выполнение 122 перемещения на втором этапе включает в себя подачу команды 160 на передвижение крыла 14 в заданное положение. Заданное положение на втором этапе является положением, выбранным для размещения крыла 14 и корпуса 16 в известном относительном положении, упоминаемым как заданное относительное положение. Обычно заданное положение является точкой траектории и заданное относительное положение является точкой траектории относительно корпуса 16. Однако, заданное положение может быть выбранным, рассчитанным и/или оцененным положением для передвижения крыла 14 в требуемом направлении и/или в требуемое положение (например, в точку траектории). Если подача команды 160 является просто подачей команды системе 58 позиционирования крыла на передвижение крыла 14 и корпуса 16 к выбранной точке траектории, то подача команды 160 является такой же, что и подача команды 114.
[0057] Выполнение 122 перемещения на втором этапе включает в себя определение 162 положения крыла (например, положения корневой части 20 крыла) при помощи измерения 3D местоположения одной или более оптических меток (например, первичных меток 50 и/или вторичных меток 54), позиционированных на крыле 14. По меньшей мере в конце перемещения на втором этапе (возле конечного положения сопряжения), первичные метки 50 могут быть скрыты и/или недоступны, и вследствие этого, не могут быть использованы в этой точке. Выполнение 122 включает в себя определение 164 положения корпуса (например, положения центроплана 30) при помощи измерения 3D местоположения одной или более оптических меток (например, первичных меток 50 и/или вторичных меток 54), установленных на корпусе 16. Измерение, связанное с определением 162 положения крыла и определением 164 положения корпуса, можно выполнять, как описано в отношении определения 152 положения крыла для первого этапа. Оптические метки соответствующих конструкций (крыла 14 или корпуса 16) измеряют бесконтактным способом (например, оптически), обычно при помощи автоматизированного процесса, например, машинного зрения, оптического 3D сканирования и/или фотограмметрии.
[0058] Выполнение 122 включает в себя вычисление 166 относительного положения крыла 14 и корпуса 16 (например, относительного положения корневой части 20 крыла и центроплана 30) на втором этапе. Относительное положение на втором этапе может основываться на разности между положением крыла и положением корпуса, определенной при помощи соответствующего определения 162 и определения 164. Выполнение 122 включает в себя вычисление 168 разности на втором этапе (обозначенной Δ2 на ФИГ. 3) между действительным относительным положением крыла (вычисленным путем вычисления 166) и заданным относительным положением. Выполнение 122 дополнительно включает в себя итеративное повторение 170 подачи команды 160, определения 162, определения 164, вычисления 166 и вычисления 168 до тех пор, пока разность на втором этапе не будет меньше или равной допустимой ошибке на втором этапе (обозначенной Т2 на ФИГ. 3). Таким образом, выполнение 122 перемещения на втором этапе включает в себя выполнение группы команд 160, определение 162, определение 164, вычисление 166 и вычисление 168 один раз или более до тех пор, пока разность на втором этапе не будет достаточно малой. Допустимая ошибка T2 на втором этапе может быть больше, меньше или равна допустимой ошибке T1 на первом этапе, но обычно допустимая ошибка T2 на втором этапе меньше или равна допустимой ошибке T1, на первом этапе, обеспечивая такую же или более высокую точность перемещения и позиционирования на втором этапе по сравнению с первым этапом. Дополнительно или в качестве альтернативы, интервал между точками траектории (обычно меньший на втором этапе) может облегчить перемещение и позиционирование с более высокой точностью на втором этапе по сравнению с первым этапом. Подача команды 160, определение 162, определение 164, вычисление 166, вычисление 168 и повторение 170 формируют цикл с обратной связью для относительного позиционирования крыла 14.
[0059] Первой подачей команды 160 в повторном цикле на втором этапе может быть подача команды системе 58 позиционирования крыла на передвижение крыла 14 в необходимую точку траектории (в заданное положение и в заданное относительное положение). Последующей подачей команды 160 в повторном цикле (то есть, подачей команды 160 для управления событиями, происходящими после определения того, что разность на втором этапе больше допустимой ошибки на втором этапе) может быть подача команды системе 58 позиционирования крыла на передвижение крыла 14 в соответствии с разностью на втором этапе. Например, последующая подача команды 160 для управления событиями может включать в себя подачу команды на уменьшение величины разности на втором этапе и/или подачу команды системе 58 позиционирования крыла на выполнение относительного передвижения, выбранного, рассчитанного и/или оцененного для передвижения крыла 14 в направлении, уменьшающем величину разности на втором этапе, и/или в направлении к требуемой точке траектории.
[0060] Во время передвижения 120 к точке(ам) траектории второго этапа и/или во время выполнения 122 перемещения на втором этапе, способы 100 могут включать в себя определение наличия контакта между крылом 14 и корпусом 16 и/или выполнение корректирующего действия в случае, если контакт произошел. Например, одно или более устройств позиционирования крыла системы позиционирования 58 может включать в себя датчик нагрузки, выполненный с возможностью показывать вес и/или другие силы, действующие на соответствующее устройство позиционирования. Если крыло 14 и корпус 16 входят в контакт, сила контакта может быть измерена датчиком(ами) нагрузки, и/или вес крыла 14 и корпуса 16 может быть перераспределен между устройствами позиционирования крыла системы позиционирования 58. Дополнительно или в качестве альтернативы, отсутствие или недостаток прогресса при выполнении 122 перемещения на втором этапе (то есть, подача команды 160 в положение на втором этапе не приводит к достаточному снижению величины разности на втором этапе) может свидетельствовать о том, что крыло 14 и корпус 16 находятся в контакте. Проверка на наличие контакта (например, проверка на ожидаемую силу нагрузки) может выполняться в пределах повторяющегося 170 цикла до, во время и/или после подачи команды 160 на перемещение в положение на втором этапе. Если проверка указывает на то, что крыло 14 и корпус 16 вошли в контакт, следующее соответствующее передвижение может быть передвижением с целью преодоления контакта (например, передвижение крыла 14 в направлении достижения следующей точки траектории) и/или передвижением с целью избежать текущего или имевшего место контакта (например, выход из положения, в котором произошел контакт).
[0061] На ФИГ. 4 подробно показано определение 130 местоположений контрольных меток для различных конструкций, например, определение 132 местоположений контрольных меток крыла для меток крыла на крыле 14 и определение 134 местоположений контрольных меток корпуса для меток корпуса на корпусе 16. Определение 130 местоположений контрольных меток можно использовать для определения положения соответствующей конструкции (например, определение 152 положения крыла на первом этапе, определение 162 положения крыла на втором этапе и/или определение 164 положения корпуса на втором этапе). Положение конструкции может быть определено и/или смоделировано посредством местоположений меток конструкции. Форма поверхности этой конструкции может быть проектной (например, известной из 3D-моделей проекта, например, модели САПР) и/или может быть фактически выполненной (например, определенной путем сканирования поверхности.
[0062] Определение 130 местоположений контрольных меток включает в себя установку 136 первичных меток на соответствующей конструкции. Установка 136 может включать в себя размещение первичных меток 50 на или в границе контакта конструкции (например, корневой части 20 крыла или центроплана 30). Первичные метки 50 можно прикреплять, фиксировать, приклеивать и/или присоединять к границе контакта конструкции. Установка 136 может включать в себя установку первичных меток 50 в известных местоположениях по отношению к границе контакта конструкции, местоположения могут быть известны, поскольку они являются определенными местоположениями (например, в реперных точках или контрольных точках, используемых во время проектирования и/или создания конструкции) и/или местоположения могут быть известны за счет измерения местоположений относительно конструкции, поверхностей или определенных местоположений (например, реперных точек или контрольных точек). Каждое местоположение первичных меток 50 может быть независимо определенным местоположением и/или измеренным местоположением.
[0063] Определение 130 может включать в себя измерение 138 местоположений первичных меток. Измерение 138 может предоставлять и/или подтверждать известные местоположения первичных меток 50 относительно соответствующей конструкции, поверхности и/или соответствующих определенных местоположений (например, реперных точек или контрольных точек). Измерение 138 включает в себя измерение 3D местоположения первичных меток 50 бесконтактным способом (например, оптическим). Измерение 138 обычно является автоматическим процессом, таким как машинное зрение, оптическое 3D сканирование и/или фотограмметрия. Измерение 138 обычно выполняют в то время, когда система 58 позиционирования крыла поддерживает соответствующую конструкцию (крыло 14 и/или корпус 16). Измерение 138 может включать в себя и/или может выполняться в сочетании со сканированием соответствующих сопрягаемых поверхностей (сопрягаемых поверхностей 22 корневой части крыла или сопрягаемых поверхностей 32 центроплана) для определения фактически выполненных 3D форм поверхностей сопрягаемых поверхностей.
[0064] Измерение 138 может включать в себя установление и/или определение единой системы координат для соответствующей конструкции. Единую систему координат можно использовать для описания положения конструкции и/или можно использовать для измерения положения геометрических элементов (например, вторичных меток 54) относительно конструкции. Таким образом, геометрические элементы, например, вторичные метки 54, могут быть измерены в единой системе координат, чтобы связать местоположения геометрических элементов с первичными метками 50 и/или с конструкцией, даже если первичные метки 50 не присутствуют или не видны при измерении геометрических элементов. Единая система координат может быть единой для корпуса 16 и/или одного или более крыльев 14.
[0065] Определение 130 местоположений контрольных меток включает в себя установку 140 вторичных меток на соответствующей конструкции. Установка 140 может включать в себя размещение вторичных меток 54 на соответствующей конструкции около границы контакта конструкции таким образом, что вторичные метки 54 будут видимы во время позиционирования (например, передвижения 110 к точке(ам) траектории первого этапа и/или передвижения 120 к точке(ам) траектории второго этапа). Например, установка 140, соответствующая определению 132 местоположений контрольных меток крыла, может включать в себя размещение вторичных меток 54 на крыле 14 около корневой части 20 крыла. Вторичные метки 54 можно прикреплять, фиксировать, приклеивать и/или присоединять к конструкции (крылу 14 или корпусу 16). Установка 140 может включать в себя установку вторичных меток 54 в известных местоположениях относительно первичных меток 50. Например, одна из вторичных меток 54 может быть установлена в местоположении на известном, предопределенном и/или измеренном расстоянии от по меньшей мере одной из первичных меток 54. В качестве другого примера, одна из вторичных меток 54 может быть установлена и затем измерена относительно местоположения по меньшей мере одной из первичных меток 50. В качестве еще одного примера, по меньшей мере одну из вторичных меток 54 и по меньшей мере одну из первичных меток 50 можно установить вместе как единое целое (например, вторичная метка(и) 54 и первичная метка(и) 50 могут находиться на рамке на известном, заранее определенном и/или измеренном расстоянии между ними).
[0066] Определение 130 может включать в себя измерение 142 положений вторичных меток. Измерение 142 может предоставить и/или подтвердить местоположения вторичных меток 54 относительно первичных меток 50 и, вследствие этого, относительно соответствующей конструкции, поверхности и/или соответствующих заданных местоположений (например, реперных точек или контрольных точек) первичных меток 50. Посредством привязки вторичных меток 54 к первичным меткам 50, вторичные метки 54 можно использовать для определения положения соответствующей конструкции. Например, положение конструкции можно определять и/или моделировать при помощи местоположений вторичных меток 54. Измерение 142 включает в себя измерение 3D местоположений вторичных меток 54 бесконтактным способом (например, оптическим). Измерение 142 в основном является автоматическим процессом, например, машинным зрением, оптическим 3D сканированием и/или фотограмметрией. Измерение 142 в основном выполняют в то время, когда система 58 позиционирования крыла поддерживает соответствующую конструкцию (крыло 14 и/или корпус 16).
[0067] Измерение 142 может включать в себя измерение одной или более вторичных меток 54 и одной или более первичных меток 50 для измерения относительных местоположений вторичных меток 54 (относительно первичных меток 50). Измерение 142 может включать в себя измерение одной или более вторичных меток 54 в единой системе координат, заданной, установленной и/или определенной известными местоположениями первичных меток 50. Таким образом, измерение 142 не требует измерения вторичных меток 54 при наличии первичных меток 50 или в случае, если обе из выбранных, вторичная метка 54 и первичная метка 50, являются видимыми.
[0068] Определение 130 местоположений контрольных меток может включать в себя удаление одной или более первичных меток 50 после измерения 142 местоположений вторичных меток или после установления и/или определения единой системы координат, при котором измеряют относительные местоположения вторичных меток 54. То есть, одну или более первичных меток 50 можно удалить после того, как они больше не нужны для определения вторичных меток и/или после того как они больше не нужны для облегчения перемещения на первом этапе и/или перемещения на втором этапе. Одну или более первичных меток 50 можно удалить перед перемещением на первом этапе и/или перед перемещением на втором этапе. Во время процесса перемещения на втором этапе, по меньшей мере вблизи конечного положения сопряжения первичные метки 50 могут быть скрыты и/или недоступны. Удаление первичных меток 50 может уменьшить количество избыточных деталей при окончательной сборке воздушного летательного аппарата, может облегчить сопряжение крыла 14 и корпуса 16 и/или может позволить повторно использовать первичные метки 50 на другой конструкции.
[0069] На ФИГ. 6 показан пример начального положения 72 или точки 70 траектории первого этапа. В положении, показанном на ФИГ. 6, крыло 14 находится достаточно далеко от корпуса 16, так что благодаря небольшим перемещениям контакт между конструкциями маловероятен. Например, расстояние между корневой частью 20 крыла и центропланом 30 в направлении у (внутрь-наружу) может составлять более 50 мм (приблизительно 2 дюймов), более 100 мм (приблизительно 4 дюймов), более 200 мм (приблизительно 8 дюймов) или более 500 мм (приблизительно 20 дюймов).
[0070] Деталь на ФИГ. 6 также показывает некоторые примеры местоположений первичных меток 50 и вторичных меток 54 на крыле 14 и корпусе 16. Первичные метки 50 находятся на или в соответствующей корневой части 20 крыла или центроплане 30. По меньшей мере некоторые из первичных меток 50 будут закрыты из-за перекрытия корневой части 20 крыла и центроплана 30 при сопряжении крыла 14 и корпуса 16. Вторичные метки 54 расположены снаружи от соответствующих сопрягаемых поверхностей 22 корневой части крыла и сопрягаемых поверхностей 32 центроплана и могут располагаться снаружи от соответствующей корневой части 20 крыла и центроплана 30. По мере того как выполняют сопряжение крыла 14 и корпуса 16, вторичные метки 54 остаются видимыми, облегчая измерение положений крыла 14 и/или корпуса 16 при сопряжении крыла 14 и корпуса 16 (проходящих вдоль пути перемещения). На ФИГ. 7 показана система на ФИГ. 6 в перспективном изображении, позволяющем видеть определенную область внутренней корневой части 20 крыла.
[0071] На ФИГ. 8 показан дополнительный пример местоположений первичных меток 50 и вторичных меток 54 на корпусе 16. На ФИГ. 8 две первичные метки 50 расположены на поперечной перегородке внутренней части центроплана 30 и три первичные метки 50 расположены вдоль ребра центроплана 30. Вторичные метки 54 расположены на конструкции корпуса 16 вблизи центроплана 30. Каждая из вторичных меток 54 может независимо находиться выше, ниже, спереди, сзади, внутри и/или снаружи центроплана 30.
[0072] На ФИГ. 9 показан дополнительный пример местоположений первичных меток 50 на крыле 14. На ФИГ. 9 три первичные метки 50 расположены вдоль ребра корневой части 20 крыла. На ФИГ. 10 показан дополнительный пример местоположений вторичных меток 54 на крыле 14. На ФИГ. 10 вторичные метки 54 расположены на внешней обшивке крыла 14 на нижней поверхности крыла 14. Каждая из вторичных меток 54 может независимо находиться выше, ниже, спереди, сзади, внутри и/или снаружи корневой части 20 крыла.
[0073] На ФИГ. 11 показана точка 70 траектории, которая является промежуточным положением 74. В промежуточном положении 74, показанном на ФИГ. 11, крыло 14 и корпус 16 находятся вблизи или на точке, в которой возможен контакт между крылом 14 и корпусом 16 благодаря малым перемещениям и/или небольшим отклонениям от заданного положения. Например, расстояние между корневой частью 20 крыла и центропланом 30 (например, минимальный интервал между сопрягаемой поверхностью 22 корневой части крыла и сопрягаемой поверхностью центроплана 32) в направлении у (внутрь-наружу) может составлять более 5 мм (приблизительно 0,2 дюйма), более 10 мм (приблизительно 0,4 дюйма), более 20 мм (приблизительно 0,8 дюйма), более 50 мм (приблизительно 2 дюймов), менее 200 мм (приблизительно 8 дюймов), менее 100 мм (приблизительно 4 дюймов) и/или менее 50 мм (приблизительно 2 дюймов).
[0074] Промежуточное положение 74 может представлять собой переходную точку траектории между первым этапом и вторым этапом перемещения (то есть, промежуточное положение 74 на ФИГ. 11 может быть конечной точкой траектории передвижения 110 к точкам траектории первого этапа и/или может быть начальной точкой траектории передвижения 120 к точкам траектории второго этапа). На ФИГ. 11 некоторые из первичных меток 50 корневой части 20 крыла и центроплана 30 являются видимыми, а некоторые скрыты. Соответствующие вторичные метки 54 в основном являются видимыми (на ФИГ. 11 показана только одна вторичная метка 54).
[0075] На ФИГ. 12 показана точка 70 траектории, которая представляет собой конечное положение 76. Точки траектории, связанные со вторым этапом перемещения, могут включать в себя конечное положение 76. На ФИГ. 12 показан пример конечного положения 76 на втором этапе. В положении, показанном на ФИГ. 12, крыло 14 сопряжено с корпусом 16 и обычно находится в контакте с корпусом 16, при необходимости с помощью регулировочных прокладок. Любые зазоры, не имеющие прокладок между крылом 14 и корпусом 16 в конечном положении 76 (то есть, зазоры между сопрягаемыми поверхностями 22 корневой части крыла и сопрягаемыми поверхностями 32 центроплана, не заполненные прокладкой, или зазоры между прокладкой и соответствующей сопрягаемой поверхностью), могут быть очень маленькими. Например, размер зазоров может быть менее 1 мм (приблизительно 0,04 дюйма), менее 0,5 мм (приблизительно 0,02 дюйма), менее 0,2 мм (приблизительно 0,008 дюйма) или менее 0,1 мм (приблизительно 0,004 дюйма).
[0076] Возвращаясь к общим способам 100, показанным на ФИГ. 1, способы 100 могут включать в себя завершающие шаги после достижения конечного положения 76 в пределах допуска (например, в пределах допустимой ошибки на втором этапе), например, выполнение сборки 190 крыла 14 к корпусу 16 и/или удаление первичных меток 50 и/или вторичных меток 54. Сборка 190 может включать в себя установку регулировочных прокладок между корневой частью 20 крыла и центропланом 30 и/или может включать в себя крепление крыла 14 и корпуса 16 друг к другу.
[0077] На ФИГ. 13 показаны регулировочные прокладки 64, установленные между сопрягаемыми поверхностями 22 корневой части крыла и сопрягаемыми поверхностями 32 центроплана. На ФИГ. 13 показано поперечное сечение подогнанных друг к другу корневой части 20 крыла и центроплана 30, с зазорами между сопрягаемыми поверхностями корневой части 20 крыла и центроплана 30. Относительное выравнивание крыла 14 и корпуса 16 может влиять на наличие, местоположение и/или размер зазоров. На ФИГ. 13 в некоторых зазорах присутствуют регулировочные прокладки 64, по существу заполняющие зазоры между сопрягаемыми поверхностями 22 корневой части крыла и сопрягаемыми поверхностями 32 центроплана. Регулировочные прокладки 64 могут выполнять фиксацию расположения крыла 14 и корпуса 16 и/или могут повышать конструктивную целостность сопряжения крыла.
[0078] Регулировочные прокладки 64 могут быть по существу призматическими и иметь толщину, соответствующую размеру зазора. Регулировочным прокладкам 64 можно придавать контур, подогнанный под зазор, по существу соответствующий сопрягаемым поверхностям. Толщина регулировочной прокладки 64 (и размер зазора) может быть не постоянной и может меняться в направлении, перпендикулярном толщине (и размеру). Таким образом, зазоры и регулировочные прокладки 64 могут быть клиновидными, листообразными и/или иметь форму параллелепипеда.
Примеры предмета изобретения в соответствии с настоящим раскрытием, описаны в следующих пронумерованных пунктах.
A1. Способ присоединения крыла к корпусу воздушного летательного аппарата, включающий:
(a) - подачу команды системе позиционирования крыла переместить узел крыла воздушного летательного аппарата в первое заданное положение;
(b) - после подачи команды (а), итеративное повторение следующего:
(i) - определение положения узла крыла на первом этапе путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - вычисление разности на первом этапе между положением на первом этапе и первым заданным положением, и
(iii) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины разности на первом этапе при условии, что величина разности на первом этапе больше допустимой ошибки на первом этапе, причем итеративное повторение (b) включает в себя повторение до тех пор, пока разность на первом этапе не будет меньше или равной допустимой ошибке на первом этапе;
(c) - после итеративного повторения (b), подачу команды системе позиционирования крыла переместить узел крыла во второе заданное положение, причем второе заданное положение выбирают для размещения узла крыла и узла корпуса воздушного летательного аппарата в заданном относительном положении на втором этапе; и
(d) - после подачи команды (с), итеративное повторение следующего:
(i) - определение положения узла крыла на втором этапе путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - определение положения узла корпуса на втором этапе путем автоматического измерения пространственных местоположений множества меток корпуса на узле корпуса,
(iii) - вычисление относительного положения на втором этапе на основе разности между положением узла крыла на втором этапе и положением узла корпуса на втором этапе,
(iv) - вычисление разности на втором этапе между относительным положением на втором этапе и заданным относительным положением на втором этапе, и
(v) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины разности на втором этапе при условии, что величина разности на втором этапе больше допустимой ошибки на втором этапе,
причем итеративное повторение (d) включает в себя повторение до тех пор, пока разность на втором этапе не будет меньше или равной допустимой ошибке на втором этапе.
А2. Способ по пункту А1, в котором метки крыла являются вторичными метками крыла,
причем вторичные метки крыла находятся в заданном относительном местоположении относительно множества первичных меток крыла, установленных на узле крыла в известном местоположении по отношению к сопрягаемой поверхности корневой части узла крыла.
А2.1. Способ по пункту А2, дополнительно включающий в себя установку первичных меток крыла на узле крыла в местоположениях первичных меток крыла, относящихся к сопрягаемой поверхности корневой части крыла,
причем каждое из местоположений первичных меток крыла независимо является известным местоположением, определенным при помощи одного из или обоих, размещения соответствующей первичной метки крыла в заданном местоположении относительно сопрягаемой поверхности корневой части крыла и измерения местоположения первичной метки крыла соответствующей первичной метки крыла относительно сопрягаемой поверхности корневой части крыла.
А2.2. Способ по любому из пунктов А2-А2.1, дополнительно включающий в себя удаление первичной метки крыла с узла крыла по выбору до по меньшей мере подачи команды (а) и/или подачи команды (с).
А2.3. Способ по любому из пунктов А2-А2.2, дополнительно включающий в себя установку вторичных меток крыла на крыле в местоположениях вторичных меток крыла, связанных с известными местоположениями первичных меток крыла.
А2.3.1. Способ по пункту А2.3, дополнительно включающий в себя измерение местоположений вторичных меток крыла для вторичных меток крыла по отношению к местоположениям первичных меток крыла при установке первичных меток крыла на узле крыла.
А2.3.2. Способ по любому из пунктов А2.3-А2.3.1, дополнительно включающий в себя измерение местоположений вторичных меток крыла для вторичных меток крыла, находящихся в единой системе координат с известными местоположениями первичных меток крыла.
А2.3.3. Способ по любому из пунктов А2.3-А2.3.2, дополнительно включающий в себя определение относительных местоположений вторичных меток крыла по отношению к местоположениям первичных меток крыла на основании местоположений вторичных меток крыла и известных местоположений первичных меток крыла.
A3. Способ по любому из пунктов А1-А2.3.3, в котором метки корпуса являются вторичными метками корпуса, причем вторичные метки корпуса находятся в заданных относительных местоположениях относительно множества первичных меток корпуса, установленных на узле корпуса в известных местоположениях относительно сопрягаемой поверхности центроплана узла корпуса.
А3.1. Способ по пункту A3, дополнительно включающий в себя установку первичных меток корпуса на узле корпуса в местоположениях первичных меток корпуса, относящихся к сопрягаемой поверхности центроплана, причем каждое из местоположений первичных меток корпуса независимо является известным местоположением, определенным при помощи одного из или обоих, размещения соответствующей первичной метки корпуса в заданном местоположении относительно сопрягаемой поверхности центроплана и измерения местоположения первичной метки корпуса для соответствующей первичной метки корпуса относительно сопрягаемой поверхности центроплана.
A3.2. Способ по любому из пунктов А3-А3.1, дополнительно включающий в себя удаление при необходимости первичных меток корпуса с узла корпуса до по меньшей мере одного из подачи команды (а) и подачи команды (с).
А3.3. Способ по любому из пунктов А3-А3.2, дополнительно включающий в себя установку вторичных меток корпуса на корпусе в местоположениях вторичных меток корпуса, относящихся к известным местоположениям первичных меток корпуса.
А3.3.1. Способ по пункту А3.3, дополнительно включающий в себя измерение местоположений вторичных меток корпуса для вторичных меток корпуса в зависимости от местоположений первичных меток корпуса, когда первичные метки корпуса установлены на узле корпуса.
A3.3.2. Способ по любому из пунктов А3.3-А3.3.1, дополнительно включающий в себя измерение местоположений вторичных меток корпуса для вторичных меток корпуса в единой системе координат с известными местоположениями первичных меток корпуса.
A3.3.3. Способ по любому из пунктов А3.3-А3.3.2, дополнительно включающий в себя определение относительных местоположений вторичных меток корпуса по отношению к местоположениям первичных меток корпуса на основании местоположений вторичных меток корпуса и известных местоположений первичных меток корпуса.
А4. Способ по любому из пунктов А1-А3.3.3, дополнительно включающий в себя определение пути перемещения узла крыла относительно узла корпуса из требуемого начального относительного положения в требуемое конечное относительное положение,
причем первое заданное положение соответствует требуемому начальному относительному положению и второе заданное положение соответствует требуемому конечному относительному положению.
А4.1. Способ по пункту А4, в котором требуемое начальное относительное положение является относительным положением, определенным первым заданным положением и положением узла корпуса.
А4.2. Способ по любому из пунктов А4-А4.1, в котором требуемое конечное относительное положение является заданным относительным положением на втором этапе.
А4.3. Способ по любому из пунктов А4-А4.2, в котором требуемое конечное относительное положение является положением, определяемым виртуальной подгонкой узла крыла к узлу корпуса.
А4.4. Способ по любому из пунктов А4-А4.3, в котором требуемое конечное относительное положение является положением, в котором узел крыла сопряжен с узлом корпуса.
А5. Способ по любому из пунктов А1-А4.4, который включает в себя выполнение подачи команды (а) и затем итеративное повторение (b) для последовательности точек траектории первого этапа вдоль пути перемещения узла крыла к узлу корпуса, и при этом способ включает в себя выполнение подачи команды (с) и затем итеративное повторение (d) для последовательности точек траектории второго этапа вдоль пути перемещения.
А5.1. Способ по пункту А5, в котором последовательность точек траектории второго этапа включает в себя конечную точку траектории, в которой узел крыла сопряжен с узлом корпуса.
А5.2. Способ по любому из пунктов А5-А5.1, в котором интервалы между последовательными точками траектории первого этапа, за которыми следуют интервалы между последовательными точками траектории второго этапа, формируют убывающую последовательность интервалов.
А5.3. Способ по любому из пунктов А5-А5.2, в котором интервалы между последовательными точками траектории первого этапа больше, чем минимальный интервал между последовательными точками траектории второго этапа.
А5.4. Способ по любому из пунктов А5-А5.3, дополнительно включающий в себя переход от выполнения с последовательностью точек траектории первого этапа к выполнению с последовательностью точек траектории второго этапа, причем переход основан по меньшей мере на одном из следующего: предельной разности на первом этапе, предельном расстоянии между точками траектории на первого этапе и предельном расстоянии между узлом крыла и узлом корпуса.
А6. Способ по любому из пунктов А1-А5.4, в котором итеративное повторение (b) начинается после того как перемещение, вызванное подачей команды (а), завершено.
А7. Способ по любому из пунктов А1-А6, в котором итеративное повторение (d) начинается после того как перемещение, вызванное подачей команды (с), завершено.
А8. Способ по любому из пунктов А1-А7, в котором определение положения узла крыла на первом этапе включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
А9. Способ по любому из пунктов А1-А8, в котором определение положения узла крыла на втором этапе включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
А10. Способ по любому из пунктов А1-А9, в котором определение положения узла корпуса на втором этапе включает в себя оптическое измерение меток корпуса, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
A11. Способ по любому из пунктов А1-А10, дополнительно включающий в себя расчет виртуальной подгонки узла крыла к узлу корпуса.
А11.1. Способ по пункту A11, в котором заданное относительное положение на втором этапе соответствует виртуальной подгонке.
A11.2. Способ по любому из пунктов А11-А11.1, дополнительно включающий в себя измерение 3D профиля сопрягаемой поверхности корневой части крыла, измерение 3D профиля сопрягаемой поверхности центроплана,
причем расчет виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана.
A11.3. Способ по любому из пунктов А11-А11.2, в котором виртуальная подгонка определяет один или более зазоров между границей контакта корневой части крыла и сопрягаемой поверхностью центроплана.
A11.4. Способ по любому из пунктов A11-A11.3, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки.
А12. Способ по любому из пунктов А1-А11.4, дополнительно включающий в себя формирование регулировочных прокладок для установки между корневой частью крыла для узла крыла и центропланом узла корпуса, при необходимости на основе виртуальной подгонки.
А12.1. Способ по пункту А12, дополнительно включающий в себя установку регулировочных прокладок по меньшей мере на корневой части крыла и/или центроплане по выбору по меньшей мере до одного из следующего: подачи команды (а), итеративного повторения (b), подачи команды (с) и итеративного повторения (d).
А13. Способ по любому из пунктов А1-А12.1, в котором система позиционирования крыла включает в себя одно или более устройств для позиционирования крыла.
А14. Способ присоединения крыла к корпусу для присоединения узла левого крыла и узла правого крыла к узлу корпуса воздушного летательного аппарата, включающий:
выполнение (а) способа по любому из пунктов А1-А13 с узлом левого крыла и
выполнение (b) способа по любому из пунктов А1-А13 с узлом правого крыла.
А14.1. Способ по пункту А14, в котором выполнение (а) является, по меньшей мере частично, одновременным с выполнением (b).
В1. Способ присоединения крыла к корпусу, предназначенный для воздушного летательного аппарата, способ, включающий в себя:
подачу команды системе позиционирования крыла переместить узел крыла воздушного летательного аппарата в точку траектории вдоль пути перемещения узла крыла к узлу корпуса воздушного летательного аппарата;
последующее итеративное повторение следующего:
(i) - определение фактического положения узла крыла посредством автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - вычисление позиционной разности между фактическим положением и точкой траектории, и
(iii) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины позиционной разности при условии, что величина позиционной разности больше допустимой ошибки,
причем итеративное повторение включает в себя повторение до тех пор, пока величина позиционной разности не будет меньше или равной допустимой ошибке.
B2. Способ по пункту В1, в котором метки крыла являются метками крыла по любому из пунктов А1-А13.
B3. Способ по любому из пунктов В1-В2, в котором подача команды и итеративное повторение являются подачей команды (а) и итеративным повторением (b) по любому из пунктов А1-А13.
B4. Способ по любому из пунктов В1-B3 дополнительно включающий в себя определение пути перемещения узла крыла относительно узла корпуса из требуемого начального относительного положения в требуемое конечное относительное положение,
причем в некоторых случаях точка траектории соответствует требуемому начальному относительному положению или требуемому конечному относительному положению.
В4.1. Способ по пункту В4, в котором требуемое конечное относительное положение является положением, определяемым виртуальной подгонкой узла крыла к узлу корпуса.
В4.2. Способ по любому из пунктов В4-В4.1, в котором требуемое конечное относительное положение является положением, в котором узел крыла сопряжен с узлом корпуса.
B5. Способ по любому из пунктов В1-В4.2, который включает в себя выполнение подачи команды в точку траектории и последующее итеративное повторение для последовательности точек траектории вдоль пути перемещения.
B5.1. Способ по пункту В5, в котором последовательность точек траектории включает в себя конечную точку траектории, в которой узел крыла сопряжен с узлом корпуса.
B5.2. Способ по любому из пунктов В5-В5.1, в котором интервалы между последовательными точками траектории образуют убывающую последовательность интервалов.
B6. Способ по любому из пунктов В1-В5.2, в котором итеративное повторение начинается после того, как перемещение, вызванное подачей команды в точку траектории, завершено.
B7. Способ по любому из пунктов В1-В6, в котором определение фактического положения узла крыла включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
B8. Способ по любому из пунктов В1-В7, дополнительно включающий в себя расчет виртуальной подгонки узла крыла к узлу корпуса.
B8.1. Способ по пункту В8, в котором точка траектории соответствует виртуальной подгонке.
B8.2. Способ по любому из пунктов В8-В8.1, дополнительно включающий в себя измерение 3D профиля сопрягаемой поверхности корневой части крыла, измерение 3D профиля сопрягаемой поверхности центроплана,
причем расчет виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана.
B8.3. Способ по любому из пунктов В8-В8.2, в котором виртуальная подгонка определяет один или более зазоров между границей контакта корневой части крыла и сопрягаемой поверхностью центроплана.
B8.4. Способ по любому из пунктов В8-В8.3, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки.
В9. Способ по любому из пунктов В1-В8.4, дополнительно включающий в себя формирование регулировочных прокладок для установки между корневой частью крыла для узла крыла и центропланом узла корпуса, при необходимости на основе виртуальной подгонки.
В9.1. Способ по пункту В9, дополнительно включающий в себя установку регулировочных прокладок по меньшей мере на одном из корневой части крыла и центроплане по выбору до по меньшей мере одного подачи команды в точку траектории и/или итеративного повторения.
B10. Способ по любому из пунктов В1-В9.1, в котором система позиционирования крыла включает в себя одно или более устройств для позиционирования крыла.
B11. Способ присоединения крыла к корпусу воздушного летательного аппарата, включающий:
подачу команды системе позиционирования крыла переместить узел крыла воздушного летательного аппарата в точку траектории вдоль пути перемещения узла крыла к узлу корпуса воздушного летательного аппарата, причем точку траектории выбирают для размещения узла крыла и корпуса в выбранном относительном положении;
последующее итеративное повторение следующего:
(i) - определение фактического положения узла крыла путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества меток корпуса на узле корпуса,
(iii) - вычисление фактического относительного положения на основе разности между реальным положением узла крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности между реальным относительным положением и выбранным относительным положением, и
(v) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины позиционной разности при условии, что величина позиционной разности больше допустимой ошибки,
причем итеративное повторение включает в себя повторение до тех пор, пока величина позиционной разности не будет меньше или равной допустимой ошибке.
B12. Способ по пункту В11, в котором метки крыла являются метками крыла по любому из пунктов А1-А13.
B13. Способ по любому из пунктов В11-В12, в котором метки корпуса являются метками корпуса по любому из пунктов А1-А13.
B14. Способ по любому из пунктов В11-В13, в котором подачей команды и итеративным повторением является подача команды (а) и итеративное повторение (b) по любому из пунктов А1-А13.
B15. Способ по любому из пунктов В11-В14, дополнительно включающий в себя определение пути перемещения узла крыла относительно узла корпуса из требуемого начального относительного положения в требуемое конечное относительное положение,
причем в некоторых случаях точка траектории соответствует требуемому начальному относительному положению или требуемому конечному относительному положению.
B15.1. Способ по пункту В15, в котором требуемое конечное относительное положение является положением, определяемым виртуальной подгонкой узла крыла к узлу корпуса.
B15.2. Способ по любому из пунктов В15-В15.1, в котором требуемое конечное относительное положение является положением, в котором узел крыла сопряжен с узлом корпуса.
B16. Способ по любому из пунктов В11-В15.2, который включает в себя выполнение подачи команды в точку траектории и последующее итеративное повторение для последовательности точек траектории вдоль пути перемещения.
B16.1. Способ по пункту В16, в котором последовательность точек траектории включает в себя конечную точку траектории, в которой узел крыла сопряжен с узлом корпуса.
B16.2. Способ по любому из пунктов В16-В16.1, в котором интервалы между последовательными точками траектории формируют убывающую последовательность интервалов.
B17. Способ по любому из пунктов В11-В16.2, в котором итеративное повторение начинается после завершения перемещения в точку траектории, вызванного подачей команды.
B18. Способ по любому из пунктов В11-В17, в котором определение фактического положения узла крыла включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
B19. Способ по любому из пунктов В11-В18, в котором определение фактического положения узла корпуса включает в себя оптическое измерение меток корпуса, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
B20. Способ по любому из пунктов В11-В19, дополнительно включающий в себя расчет виртуальной подгонки узла крыла к узлу корпуса.
В20.1. Способ по пункту В20, в котором точки траектории соответствует виртуальной подгонке.
B20.2. Способ по любому из пунктов В20-В20.1, дополнительно включающий в себя измерение 3D профиля сопрягаемой поверхности корневой части крыла, измерение 3D профиля сопрягаемой поверхности центроплана,
причем расчет виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана.
B20.3. Способ по любому из пунктов В20-В20.2, в котором виртуальная подгонка определяет один или более зазоров между границей контакта корневой части крыла и сопрягаемой поверхностью центроплана.
B20.4. Способ по любому из пунктов В20-В20.3, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки.
B21. Способ по любому из пунктов В11-В20.4, дополнительно включающий в себя формирование регулировочных прокладок для установки между корневой частью крыла для узла крыла и центропланом узла корпуса, при необходимости на основе виртуальной подгонки.
В21.1. Способ по пункту В21, дополнительно включающий в себя установку регулировочных прокладок по меньшей мере на корневой части крыла и/или центроплане по выбору до по меньшей мере одного подачи команды в точку траектории и/или итеративного повторения.
B22. Способ по любому из пунктов В11-В21.1, в котором система позиционирования крыла включает в себя одно или более устройств для позиционирования крыла.
С1. Способ присоединения крыла к корпусу для присоединения двух узлов крыльев к узлу корпуса воздушного летательного аппарата, включающий:
выполнение передвижения слева по борту узла левого крыла и левой стороны узла корпуса; и
выполнение передвижения справа по борту узла правого крыла и правой стороны узла корпуса;
в котором передвижение слева по борту включает в себя: подачу команды системе позиционирования крыла переместить узел левого крыла к точке левой траектории, выбранной для размещения узла левого крыла и левой стороны узла корпуса в выбранном относительном положении слева по борту;
последующее итеративное повторение следующего:
(i) - определение фактического положения узла левого крыла путем автоматического измерения пространственных местоположений множества меток левого крыла на узле левого крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества левых меток корпуса на левой стороне узла корпуса,
(iii) - вычисление фактического относительного положения с левой стороны на основе разности между реальным положением узла левого крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности слева по борту между фактическим относительным положением с левой стороны и выбранным относительным положением с левой стороны, и
(v) - подача команды системе позиционирования крыла переместить узел левого крыла для уменьшения величины позиционной разности слева по борту при условии, что величина позиционной разности слева по борту больше допустимой ошибки, причем итеративное повторение передвижения слева по борту включает в себя повторение до тех пор, пока величина позиционной разности слева по борту не будет меньше или равной допустимой ошибке;
в котором передвижение справа по борту содержит: подачу команды системе позиционирования крыла на передвижение узла правого крыла в правую точку траектории, выбранную для размещения узла правого крыла и правой стороны узла корпуса в выбранном относительном положении справа по борту; последующее итеративное повторение следующего:
(i) - определение фактического положения узла правого крыла путем автоматического измерения пространственных местоположений множества меток правого крыла на узле правого крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества правых меток корпуса на правой стороне узла корпуса,
(iii) - вычисление фактического относительного положения справа по борту на основе разности между реальным положением узла правого крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности справа по борту между фактическим относительным положением справа по борту и выбранным относительным положением справа по борту, и
(v) - подача команды системе позиционирования крыла переместить узел правого крыла для уменьшения величины позиционной разности справа по борту при условии, что величина позиционной разности справа по борту больше допустимой ошибки,
причем итеративное повторение перемещения справа по борту включает в себя повторение до тех пор, пока величина позиционной разности справа по борту не будет меньше или равной допустимой ошибке.
С2. Способ по пункту С1, в котором метки левого крыла являются метками крыла по любому из пунктов А1-А13.
C3. Способ по любому из пунктов С1-С2, в котором метки правого крыла являются метками крыла по любому из пунктов А1-А13.
С4. Способ по любому из пунктов С1-C3, в котором метки левой части корпуса являются метками корпуса по любому из пунктов А1-А13.
С5. Способ по любому из пунктов С1-С4, в котором метки правой части корпуса являются метками корпуса по любому из пунктов А1-А13.
C6. Способ по любому из пунктов С1-С5, в котором подача команды и итеративное повторение для узла левого крыла являются подачей команды (с) и итеративным повторением (d) по любому из пунктов А1-А13.
С7. Способ по любому из пунктов С1-С6, в котором подача команды и итеративное повторение для узла правого крыла являются подачей команды (с) и итеративным повторением (d) по любому из пунктов А1-А13.
С8. Способ по любому из пунктов С1-С7, в котором выполнение передвижения слева по борту, по меньшей мере частично, выполняют одновременно с выполнением перемещения справа по борту.
С9. Способ по любому из пунктов С1-С8, включающий в себя выполнение передвижения слева по борту узла левого крыла к левой стороне узла корпуса для последовательности точек траектории, находящихся слева по борту вдоль пути перемещения слева по борту, и выполнение передвижения справа по борту узла правого крыла к правой стороне узла корпуса для последовательности точек траектории, находящихся справа по борту вдоль пути перемещения справа по борту.
С9.1. Способ по пункту С9, в котором путь передвижения слева по борту является путем перемещения по любому из пунктов В11-В22.
С9.2. Способ по любому из пунктов С9-С9.1, в котором путь перемещения справа по борту является путем перемещения по любому из пунктов В11-В22.
С9.3. Способ по любому из пунктов С9-С9.2, в котором последовательность точек траектории слева по борту включает в себя конечную левую точку траектории, в котором узел левого крыла сопряжен с левой стороной узла корпуса,
причем последовательность правых точек траектории включает в себя конечную правую точку траектории, в которой узел правого крыла сопряжен с правой стороной узла корпуса.
C10. Способ по любому из пунктов С1-С9.3, в котором определение фактического положения узла левого крыла включает в себя оптическое измерение меток левого крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
C11. Способ по любому из пунктов С1-С10, в котором определение фактического положения узла корпуса посредством измерения левых меток корпуса включает в себя оптическое измерение левых меток корпуса, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
С12. Способ по любому из пунктов С1-С11, в котором определение фактического положения узла правого крыла включает в себя оптическое измерение правых меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
С13. Способ по любому из пунктов С1-С12, в котором определение фактического положения узла корпуса посредством измерения правых меток корпуса включает в себя оптическое измерение правых меток корпуса, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
С14. Способ по любому из пунктов С1-С13, дополнительно включающий в себя расчет виртуальной подгонки узла левого крыла к левой стороне узла корпуса и расчет виртуальной подгонки узла правого крыла к правой стороне узла корпуса справа по борту.
С14.1. Способ по пункту С14, в котором точка траектории слева по борту соответствует виртуальной подгонке со стороны левого борта и точка траектории справа по борту соответствует виртуальной подгонке со стороны правого борта.
С14.2. Способ по любому из пунктов С14-С14.1, дополнительно включающий в себя измерение 3D профиля сопрягаемой поверхности левой корневой части крыла, измерение 3D профиля сопрягаемой поверхности левой части центроплана,
причем расчет виртуальной подгонки слева по борту включает в себя расчет виртуальной подгонки слева по борту на основе 3D профиля сопрягаемой поверхности левой корневой части крыла и 3D профиля сопрягаемой поверхности левой части центроплана, и дополнительно включающий в себя измерение 3D профиля правой сопрягаемой поверхности корневой части крыла, измерение 3D профиля правой сопрягаемой поверхности центроплана,
причем расчет виртуальной подгонки справа по борту включает в себя расчет виртуальной подгонки справа по борту на основе 3D профиля правой сопрягаемой поверхности корневой части крыла и 3D профиля правой сопрягаемой поверхности центроплана.
С14.3. Способ по любому из пунктов С14-С14.2, в котором виртуальная подгонка с левой стороны определяет один или более зазоров между границей контакта левой корневой части крыла и сопрягаемой поверхностью левой части центроплана,
причем виртуальная подгонка справа по борту определяет один или более зазоров между границей контакта корневой части правого крыла и сопрягаемой поверхностью правой части центроплана.
С14.4. Способ по любому из пунктов С14-С14.3, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки слева по борту и виртуальной подгонки справа по борту.
С15. Способ по любому из пунктов С1-С14.4, дополнительно включающий в себя формирование регулировочных прокладок для установки между левой корневой частью крыла узла левого крыла и левой частью центроплана узла корпуса, при необходимости основанное на виртуальной подгонке со стороны левого борта, и дополнительно включающий в себя формирование регулировочных прокладок для установки между корневой частью правого крыла узла правого крыла и правой частью центроплана узла корпуса, при необходимости основанное на виртуальной подгонке справа по борту.
С15.1. Способ по пункту С15, дополнительно включающий в себя установку регулировочных прокладок на по меньшей мере одном из следующего: левой корневой части крыла, левой части центроплана, корневой части правого крыла и правой части центроплана, по выбору по меньшей мере до выполнения передвижения слева по борту и/или выполнения передвижения справа по борту.
D1. Способ присоединения крыла к корпусу воздушного летательного аппарата, включающий:
(a) - подачу команды системе позиционирования крыла переместить узел крыла воздушного летательного аппарата в первую точку траектории вдоль пути перемещения узла крыла между отделенным положением и положением сопряжения;
(b) - после подачи команды (а), итеративное повторение следующего:
(i) - определение первого положения узла крыла путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - вычисление первой разности между первым положением и первой точкой траектории, и
(iii) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины первой разности при условии, что величина первой разности больше допустимой ошибки,
причем итеративное повторение (b) включает в себя повторение до тех пор, пока величина первой разности не будет меньше или равной допустимой ошибке;
(c) - после итеративного повторения (b), подача команды системе позиционирования крыла переместить узел крыла ко второй точке траектории вдоль пути перемещения, причем вторая точка траектории находится ближе к положению сопряжения, чем первая точка траектории;
(d) - после подачи команды (с), итеративное повторение следующего:
(i) - определение второго положения узла крыла путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - вычисление второй разности между вторым положением и второй точкой траектории, и
(iii) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины второй разности при условии, что величина второй разности больше допустимой ошибки,
причем итеративное повторение (d) включает в себя повторение до тех пор, пока вторая разность не будет меньше или равной допустимой ошибке.
D2. Способ по пункту D1, в котором метки крыла являются вторичными метками крыла, причем вторичные метки крыла находятся в заданных относительных местоположениях относительно множества первичных меток крыла, установленных на узле крыла в известных местоположениях по отношению к сопрягаемой поверхности корневой части крыла для узла крыла.
D2.1. Способ по пункту D2, дополнительно включающий в себя установку первичных меток крыла на узле крыла в местоположениях первичных меток крыла, относящихся к сопрягаемой поверхности корневой части крыла, причем каждое из местоположений первичных меток крыла независимо является известным местоположением, определенным при помощи одного из или обоих, размещения соответствующей первичной метки крыла в заданном местоположении относительно сопрягаемой поверхности корневой части крыла и измерения местоположения первичной метки крыла соответствующей первичной метки крыла относительно сопрягаемой поверхности корневой части крыла.
D2.2. Способ по любому из пунктов D2-D2.1, дополнительно включающий в себя удаление первичной метки крыла с узла крыла по выбору по меньшей мере до подачи команды (а) и/или подачи команды (с).
D2.3. Способ по любому из пунктов D2-D2.2, дополнительно включающий в себя установку вторичных меток крыла на крыле в местоположениях вторичных меток крыла, связанных с известными местоположениями первичных меток крыла.
D2.3.1. Способ по пункту D2.3, дополнительно включающий в себя измерение местоположений вторичных меток крыла для вторичных меток крыла по отношению к местоположениям первичных меток крыла при установке первичных меток крыла на узле крыла..
D2.3.2. Способ по любому из пунктов D2.3-D2.3.1, дополнительно включающий в себя измерение местоположений вторичных меток крыла для вторичных меток крыла, находящихся в единой системе координат с известными местоположениями первичных меток крыла.
D2.3.3. Способ по любому из пунктов D2.3-D2.3.2, дополнительно включающий в себя определение относительных местоположений вторичных меток крыла по отношению к местоположениям первичных меток крыла на основании местоположений вторичных меток крыла и известных местоположений первичных меток крыла.
D3. Способ по любому из пунктов D1-D2.3.3, в котором вторая точка траектории является положением сопряжения.
D4. Способ по любому из пунктов D1-D3, дополнительно включающий в себя определение пути перемещения узла крыла относительно узла корпуса воздушного летательного аппарата.
D4.1. Способ по пункту D4, в котором определение пути перемещения основано на предотвращении контакта подгонкой узла крыла к узлу корпуса воздушного летательного аппарата, по мере того как узел крыла следует по пути перемещения в положение сопряжения.
D4.2. Способ по любому из пунктов D4-D4.1, в котором определение пути перемещения основано на 3D профиле сопрягаемой поверхности корневой части крыла для узла крыла, и, в некоторых случаях, на 3D профиле сопрягаемой поверхности центроплана узла корпуса воздушного летательного аппарата.
D4.2.1. Способ по пункту D4.2, дополнительно включающий в себя измерение 3D профиля границы контакта корневой части крыла и, в некоторых случаях, измерение 3D профиля сопрягаемой поверхности центроплана узла корпуса.
D4.3. Способ по любому из пунктов D4-D4.2.1, в котором определение пути перемещения основано по меньшей мере на спроектированной модели узла крыла и/или фактически выполненной модели узла крыла.
D4.4. Способ по любому из пунктов D4-D4.3, в котором определение пути перемещения основано по меньшей мере на спроектированной модели узла крыла и/или фактически выполненной модели узла корпуса.
D4.5. Способ по любому из пунктов D4-D4.4, в котором определение пути перемещения основано на виртуальной подгонке узла крыла и узла корпуса.
D4.6. Способ по любому из пунктов D4-D4.5, в котором определение пути перемещения включает в себя создание последовательности точек траектории между отделенным положением и положением сопряжения,
причем в некоторых случаях последовательность точек траектории является положениями, в которых узел крыла расположено на расстоянии от узла корпуса воздушного летательного аппарата.
D4.7. Способ по любому из пунктов D4-D4.6, в котором определение пути перемещения включает в себя создание пути перемещения таким образом, что первая точка траектории является положением, в котором узел крыла расположено на расстоянии от узла корпуса воздушного летательного аппарата.
D4.8. Способ по любому из пунктов D4-D4.7, в котором определение пути перемещения включает в себя создание сегмента вращения и сегмента поступательного перемещения на пути перемещения.
D4.9. Способ по любому из пунктов D4-D4.8, в котором определение пути перемещения включает в себя создание сегмента связанного вращения и поступательного перемещения на пути перемещения.
D5. Способ по любому из пунктов D1-D4.9, в котором путь перемещения включает в себя последовательность точек траектории между отделенным положением и положением сопряжения.
D5.1. Способ по пункту D5, в котором интервалы между последовательными точками траектории формируют убывающую последовательность интервалов.
D6. Способ по любому из пунктов D1-D5.1, в котором итеративное повторение (b) начинается после того как перемещение, вызванное подачей команды (а), завершено.
D7. Способ по любому из пунктов D1-D6, в котором итеративное повторение (d) начинается после того как перемещение, вызванное подачей команды (с), завершено.
D8. Способ по любому из пунктов D1-D7, в котором определение первого положения узла крыла включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
D9. Способ по любому из пунктов D1-D8, в котором определение второго положения узла крыла включает в себя оптическое измерение меток крыла, используя по выбору по меньшей мере одно из следующего: лазерное отслеживание, лазерную локацию, ЛИДАР и фотограмметрию.
D10. Способ по любому из пунктов D1-D9, в котором положение сопряжения является положением, определяемым виртуальной подгонкой узла крыла к узлу корпуса воздушного летательного аппарата.
D11. Способ по любому из пунктов D1-D10, дополнительно включающий в себя расчет виртуальной подгонки узла крыла к узлу корпуса воздушного летательного аппарата.
D11.1. Способ по пункту D11, дополнительно включающий в себя измерение 3D профиля сопрягаемой поверхности корневой части крыла для узла крыла, измерение 3D профиля сопрягаемой поверхности центроплана узла корпуса,
причем расчет виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана.
D11.2. Способ по любому из пунктов D11-D11.1, в котором виртуальная подгонка определяет один или более зазоров между границей контакта корневой части крыла и сопрягаемой поверхностью центроплана.
D11.3. Способ по любому из пунктов D11-D11.2, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки.
D11.4. Способ по любому из пунктов D11-D11.3, дополнительно включающий в себя расчет виртуальной подгонки по меньшей мере до одного из следующего: подачи команды (а), итеративного повторения (b), подачи команды (с) и итеративного повторения (d).
D12. Способ по любому из пунктов D1-D11.4, дополнительно включающий в себя формирование регулировочных прокладок для установки между корневой частью крыла для узла крыла и центропланом узла корпуса воздушного летательного аппарата, в некоторых случаях на основе виртуальной подгонки.
D12.1. Способ по пункту D12, дополнительно включающий в себя установку регулировочных прокладок по меньшей мере на корневой части крыла и/или центроплане по выбору по меньшей мере до одного из следующего: подачи команды (а), итеративного повторения (b), подачи команды (с) и итеративного повторения (d).
D13. Способ по любому из пунктов D1-D12.1, в котором система позиционирования крыла включает в себя одно или более устройств для позиционирования крыла.
D14. Способ по любому из пунктов D1-D13, дополнительно включающий в себя перемещение на втором этапе, содержащий:
(е) - после итеративного повторения (d), подача команды системе позиционирования крыла переместить узел крыла к третьей точке траектории вдоль пути перемещения, причем третья точка траектории находится ближе к положению сопряжения, чем вторая точка траектории, причем третью точку траектории выбирают для размещения узла крыла и узла корпуса воздушного летательного аппарата в относительном положении на втором этапе;
(f) - после подачи команды (е), итеративное повторение следующего: (i) - определение положения узла крыла на втором этапе путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла, (ii) - определение положения узла корпуса на втором этапе путем автоматического измерения пространственных местоположений множества меток корпуса на узле корпуса, (iii) - вычисление действительного относительного положения на основе разности между положением узла крыла на втором этапе и положением узла корпуса на втором этапе, (iv) - вычисление третьей разности между действительным относительным положением и относительным положением на втором этапе, и (v) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины третьей разности при условии, что величина третьей разности больше допустимой ошибки на втором этапе, причем итеративное повторение (f) включает в себя повторение до тех пор, пока третья разность не будет меньше или равной допустимой ошибке на втором этапе.
D14.1. Способ по пункту D14, в котором метки корпуса являются вторичными метками корпуса, причем вторичные метки корпуса находятся в заданных относительных местоположениях относительно множества первичных меток корпуса, установленных на узле корпуса в известных местоположениях относительно сопрягаемой поверхности центроплана узла корпуса.
D14.1.1. Способ по пункту D14.1, дополнительно включающий в себя установку первичных меток корпуса на узле корпуса в местоположениях первичных меток корпуса, относящихся к сопрягаемой поверхности центроплана, причем каждое из местоположений первичных меток корпуса независимо является известным местоположением, определенным при помощи одного из или обоих, размещения соответствующей первичной метки корпуса в заданном местоположении относительно сопрягаемой поверхности центроплана и измерения местоположения первичной метки корпуса для соответствующей первичной метки корпуса относительно сопрягаемой поверхности центроплана.
D14.1.2. Способ по любому из пунктов D14.1-D14.1.1, дополнительно включающий в себя удаление первичных меток корпуса с узла корпуса, по выбору по меньшей мере до одного из следующего: подачи команды (а), подачи команды (с) и подачи команды (е).
D14.1.3. Способ по любому из пунктов D14.1-D14.1.2, дополнительно включающий в себя установку вторичной метки корпуса на корпусе в местоположениях вторичных меток корпуса, относящихся к известным местоположениям первичных меток корпуса.
D14.1.3.1. Способ по пункту D14.1.3, дополнительно включающий в себя измерение местоположений вторичных меток для вторичных меток корпуса в зависимости от местоположений первичных меток корпуса, когда первичные метки корпуса установлены на узле корпуса.
D14.1.3.2. Способ по любому из пунктов D14.1.3-D14.1.3.1, дополнительно включающий в себя измерение местоположений вторичных меток корпуса, находящихся в единой системе координат с известными местоположениями первичных меток корпуса.
D14.1.3.3. Способ по любому из пунктов D14.1.3-D14.1.3.2, дополнительно включающий в себя определение относительных местоположений вторичных меток корпуса по отношению к местоположениям первичных меток корпуса на основании местоположений вторичных меток корпуса и известных местоположений первичных меток корпуса.
D15. Способ присоединения крыла к корпусу для присоединения узла левого крыла и узла правого крыла к узлу корпуса воздушного летательного аппарата, включающий:
выполнение (а) способа по любому из пунктов D1-D14.1.3.3 с узлом левого крыла и
выполнение (b) способа по любому из пунктов D1-D14.1.3.3 с узлом правого крыла.
D15.1. Способ по пункту D15, в котором выполнение (а) является по меньшей мере частично, одновременным с выполнением (b).
При использовании в настоящем документе, термины "адаптированный" и "сконфигурированный" означают, что элемент, компонент или другой объект изобретения разработан и/или выполнен с возможностью выполнения данной функции. Следовательно, использование терминов "адаптированный" и "сконфигурированный" не должно пониматься как означающее, что данный элемент, компонент или другой объект изобретения просто "способен" выполнять данную функцию, но что элемент, компонент и/или другой объект изобретения специально выбран, создан, реализован, использован, запрограммирован и/или разработан с целью выполнения данной функции.. Также в пределах объема настоящего раскрытия элементы, компоненты и/или другие перечисленные объекты изобретения, которые описаны как выполненные с возможностью выполнения определенной функции, могут дополнительно или альтернативно быть описаны, как выполненные с возможностью выполнять данную функцию, и наоборот. Аналогичным образом, объект изобретения, который описан, как выполненный с возможностью выполнения определенной функции может быть дополнительно или альтернативно описан, как функционирующий для выполнения этой функции.
При использовании в настоящем документе, выражение "например", выражение "в качестве примера" и/или просто выражение "пример", используемые со ссылкой на один или более компонентов, признаков, деталей, конструкций, вариантов осуществления и/или способов согласно настоящему раскрытию, предназначены для передачи информации о том, что описанный компонент, признак, деталь, конструкция, вариант осуществления и/или способ является иллюстративным, не исключающим примером компонентов, признаков, деталей, конструкций, вариантов осуществления и/или способов согласно настоящему раскрытию. Таким образом, описанный компонент, признак, деталь, конструкция, вариант осуществления и/или способ не предназначен быть ограничивающим, обязательным или исключительным/исчерпывающим и другие компоненты, признаки, детали, конструкции, варианты осуществления и/или способы, включая в себя конструктивно и/или функционально аналогичные и/или эквивалентные компоненты, признаки, детали, конструкции, варианты осуществления и/или способы, также находятся в объеме настоящего раскрытия.
При использовании в настоящем документе выражение "по меньшей мере один из" и "один или более из" со ссылкой на список из более чем одного объекта, означает любой один или более объектов в списке объектов и не ограничивается по меньшей мере одним и каждым объектом конкретно перечисленным в пределах списка объектов. Например, "по меньшей мере одно из А и В" (или, что то же, "по меньшей мере одного из А или В" или, что то же, " по меньшей мере одно из А и/или В") может относиться только к одному А, одному В или комбинации А и В.
При использовании в настоящем документе, форма единственного числа "a", "an" и "the" могут также предназначаться для включения формы множественного числа, если из контекста явно не следует иное.
Различные раскрытые элементы систем и шагов способов, раскрытых в данном документе, не требуются для всех систем и способов согласно настоящему раскрытию, и настоящее раскрытие включает в себя все новые и неочевидные комбинации и подкомбинации различных элементов и шагов, раскрытых в данном документе. Кроме того, любой из различных элементов и шагов или любая комбинация различных элементов и/или шагов, раскрытых в данном документе, может определить независимый объект изобретения, который является отдельным и не зависит от всей раскрытой системы или способа. Соответственно, не требуется, чтобы такой предмет изобретения был связан с конкретными системами и способами, явно раскрытыми в данном документе, и такие объекты изобретения могут найти применение в системах и/или методах, которые явным образом не раскрыты в данном документе
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ СТРЕЛЬБЫ ПО ЦЕЛИ В СЕТЕВОЙ КОМПЬЮТЕРНОЙ ИГРЕ | 2009 |
|
RU2413998C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ УСТРОЙСТВА ПОЛЬЗОВАТЕЛЯ С ПРИВЯЗКОЙ К ВИЗУАЛЬНЫМ ОСОБЕННОСТЯМ ОКРУЖЕНИЯ | 2022 |
|
RU2828682C2 |
| Способ создания хирургических шаблонов для имплантологической реабилитации пациента (варианты) | 2023 |
|
RU2827667C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИГРОКОВ В ИГРОВОМ ПРОСТРАНСТВЕ СЕТЕВОЙ КОМПЬЮТЕРНОЙ ИГРЫ | 2009 |
|
RU2413997C1 |
| СПОСОБ ПОИСКА И РЕГИСТРАЦИИ МЕТОК В СИСТЕМЕ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2680719C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| СОВМЕЩЕНИЕ СИСТЕМ КООРДИНАТ | 2007 |
|
RU2445007C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СГЛАЖИВАНИЯ ПОВЕРХНОСТИ КОНСТРУКТИВНОГО ЭЛЕМЕНТА, В ЧАСТНОСТИ, КРУПНЫХ СТРУКТУР | 2010 |
|
RU2530052C2 |
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |
| ФИЛЬТР ВИРТУАЛЬНОЙ ВЫСОТЫ ДЛЯ ПРЕДСТАВЛЕНИЯ ОТРАЖЕННОГО ЗВУКА С ПОМОЩЬЮ НАПРАВЛЕННЫХ ВВЕРХ ДИНАМИКОВ | 2014 |
|
RU2613042C2 |
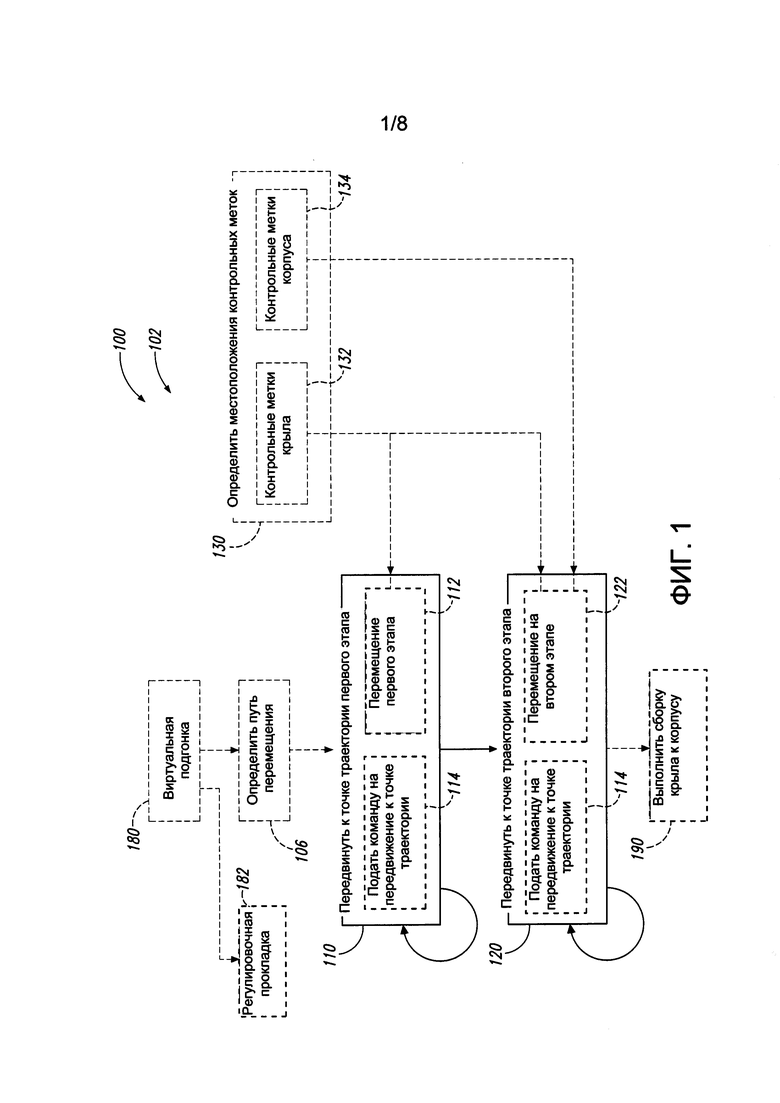
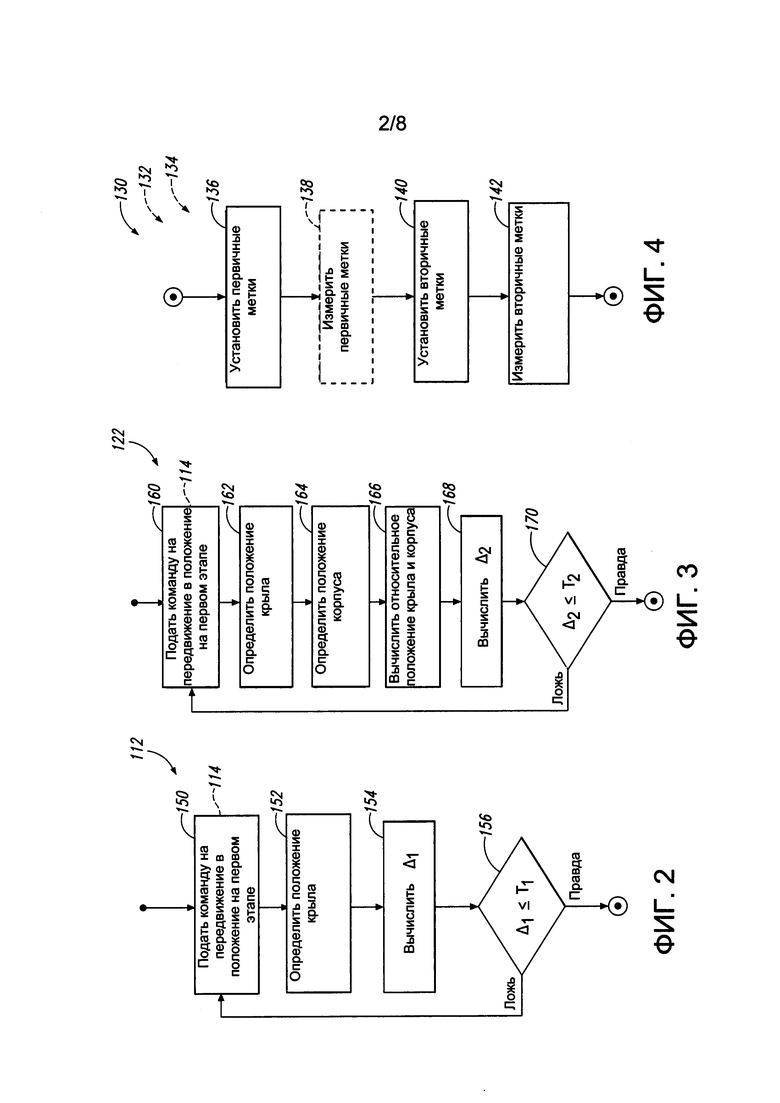
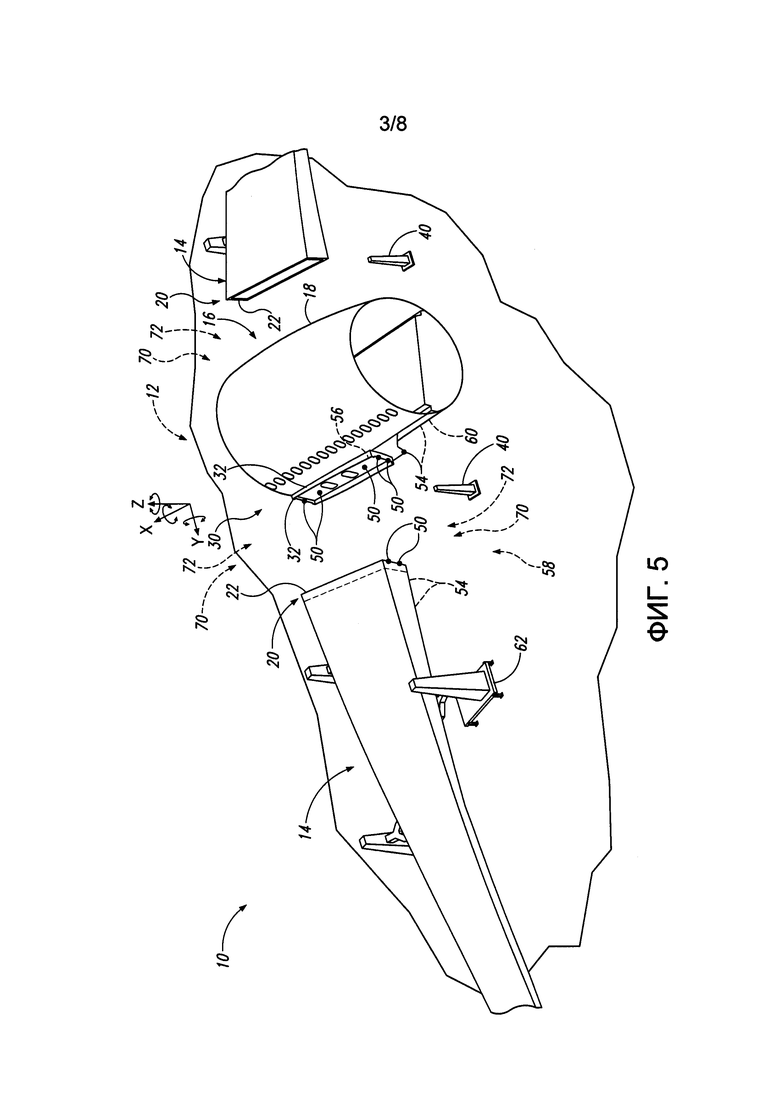

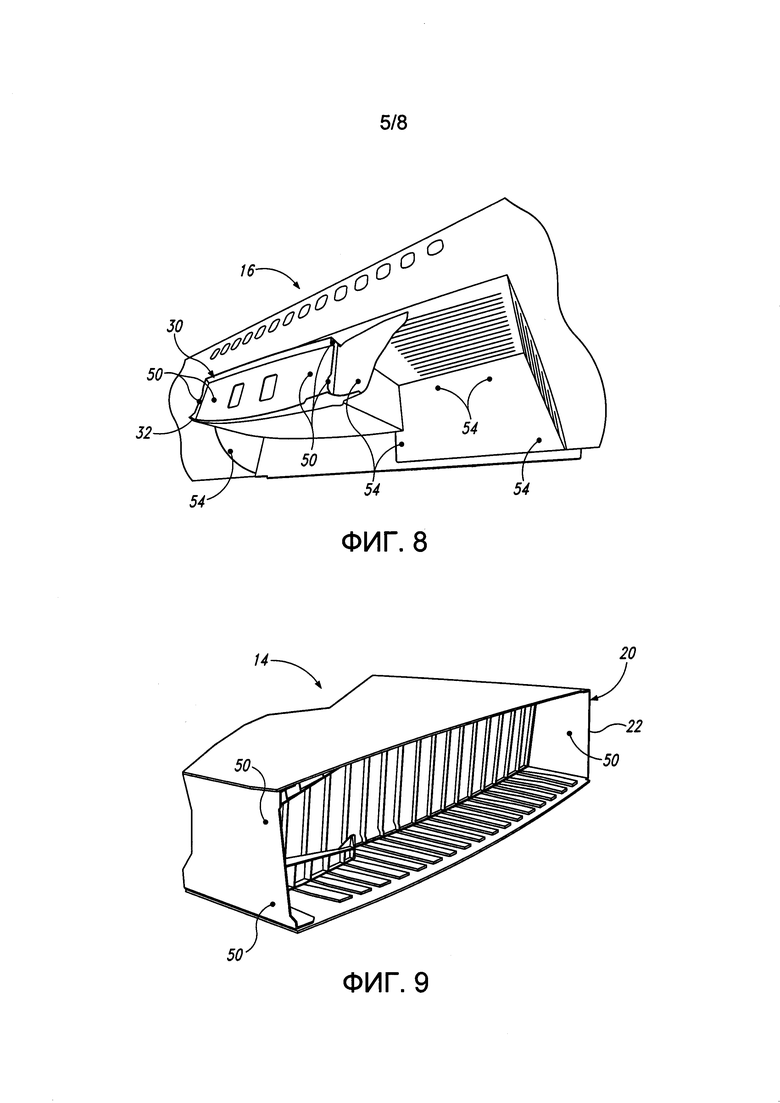
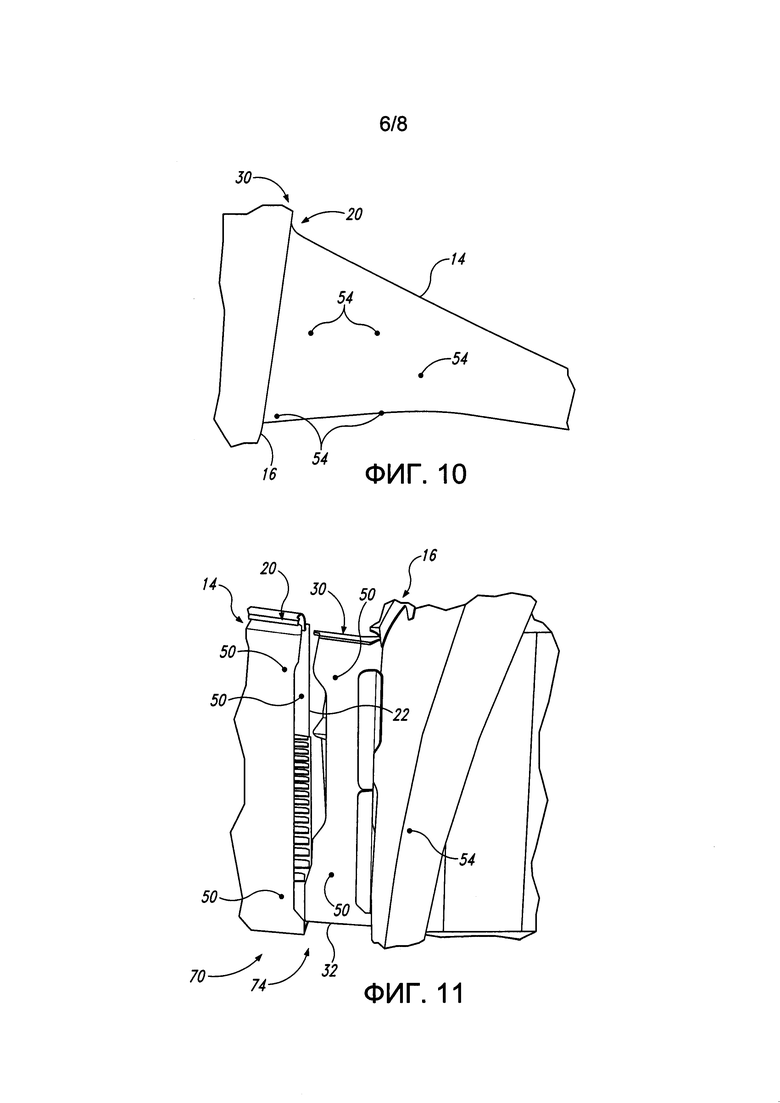
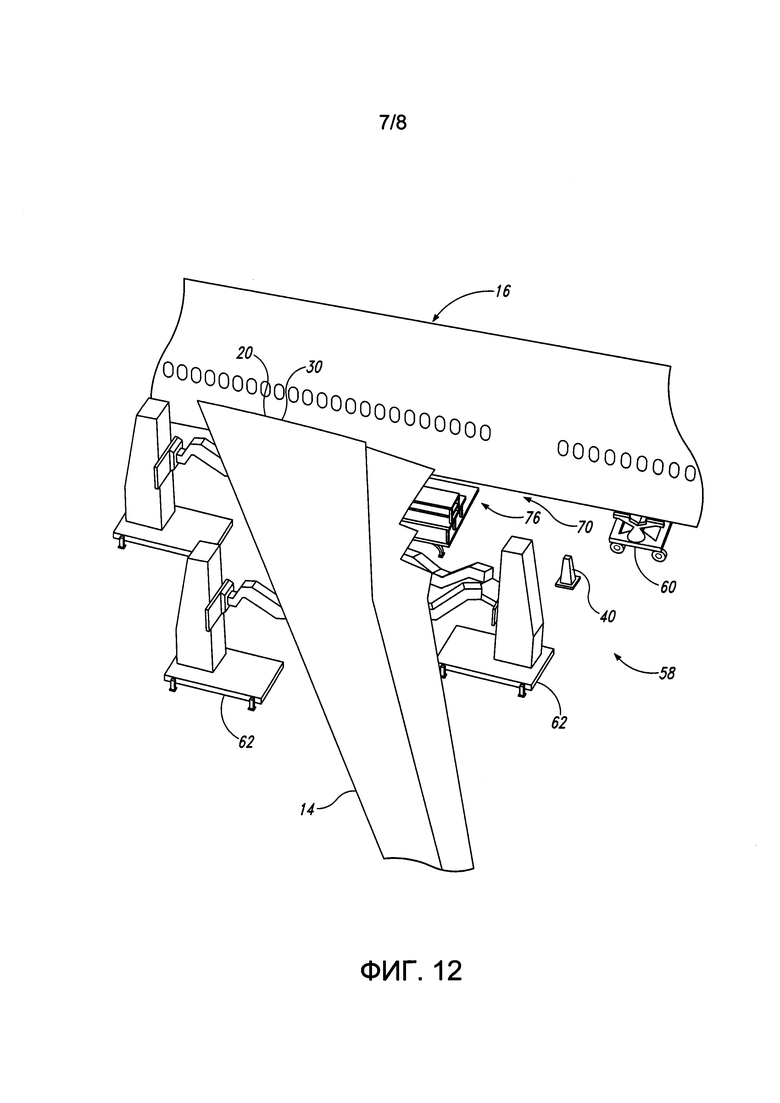

Способ присоединения крыла к корпусу (варианты) включает подачу команды переместить крыло в первое заданное положение и затем итеративное повторение перемещения на первом этапе и/или подачи команды переместить крыло во второе заданное положение. Затем итеративное повторение перемещения на втором этапе. Перемещение на первом этапе включает определение фактического положения крыла, вычисление разности на первом этапе между фактическим положением и первым заданным положением и подачу команды переместить крыло для уменьшения величины разности на первом этапе. Перемещение на втором этапе включает в себя определение фактического положения крыла, определение фактического положения корпуса, вычисление разности на втором этапе на основе второго заданного положения и реальных положений крыла и корпуса и подача команды переместить крыло для уменьшения величины разности на втором этапе. Варианты осуществления включают также выполнение передвижения слева по борту левого крыла воздушного летательного аппарата и выполнение передвижения справа по борту правого крыла воздушного летательного аппарата. Группа изобретений направлена на повышение точности подгонки компонентов летательного аппарата. 4 н. и 16 з.п. ф-лы, 13 ил.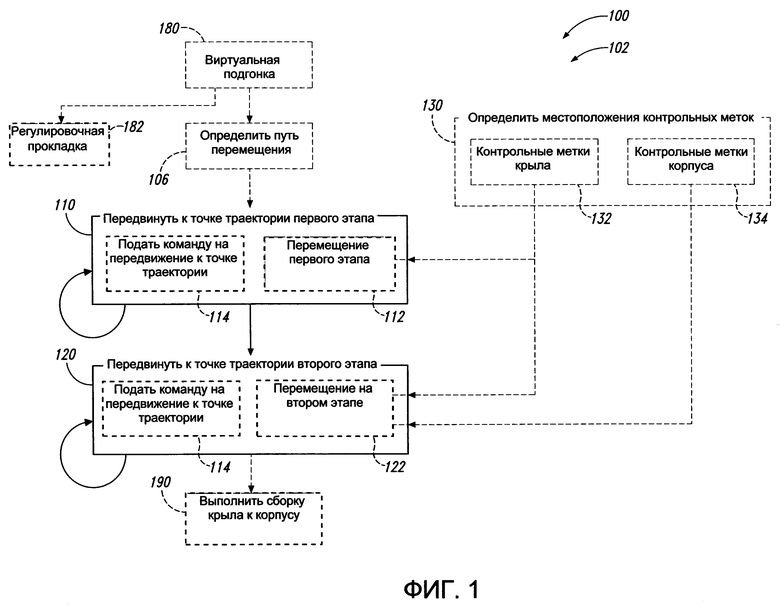
1. Способ (100) присоединения крыла к корпусу воздушного летательного аппарата (12), включающий:
(a) расчет (180) виртуальной подгонки узла (14) крыла к узлу (16) корпуса воздушного летательного аппарата (12); и
(b) измерение 3D профиля сопрягаемой поверхности (22) корневой части крыла узла (14) крыла, измерение 3D профиля сопрягаемой поверхности (32) центроплана узла (16) корпуса, причем расчет (180) виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана;
(c) подачу (114) команды системе (58) позиционирования крыла переместить узел (14) крыла воздушного летательного аппарата (12) в первую точку (70) траектории вдоль пути перемещения узла (14) крыла между отделенным положением и положением сопряжения, причем положение сопряжения определено виртуальной подгонкой, а
путь перемещения основан на действительных фактически выполненных формах узла (14) крыла и узла (16) корпуса, при этом указанные действительные формы моделируют путем выполнения 3D сканирования;
(d) - после подачи команды (с), итеративное повторение следующего:
(i) - определение (152) первого положения узла (14) крыла путем автоматического измерения пространственных местоположений множества меток (50, 54) крыла на узле (14) крыла,
(ii) - вычисление (154) первой разности (Δ1) между первым положением и первой точкой (70) траектории, и
(iii) - подача (150) команды системе позиционирования крыла переместить узел (14) крыла для уменьшения величины первой разности (Δ1) при условии, что величина первой разности (Δ1) больше допустимой ошибки (T1),
причем итеративное повторение (d) включает в себя повторение до тех пор, пока величина первой разности (Δ1) не будет меньше или равной допустимой ошибке (T1);
(e) - после итеративного повторения (d), подача (150) команды системе (58) позиционирования крыла переместить узел (14) крыла ко второй точке (70) траектории вдоль пути перемещения, причем вторая точка (70) траектории находится ближе к положению сопряжения, чем первая точка (70) траектории;
(f) - после подачи команды (с), итеративное повторение следующего:
(i) - определение (152) второго положения узла (14) крыла путем автоматического измерения пространственных местоположений множества меток (50, 54) крыла на узле (14) крыла,
(ii) - вычисление (154) второй разности (Δ1) между вторым положением и второй точкой (70) траектории, и
(iii) - подача (150) команды системе (58) позиционирования крыла переместить узел (14) крыла для уменьшения величины второй разности (Δ1) при условии, что величина второй разности (Δ1) больше допустимой ошибки (T1),
причем итеративное повторение (f) включает в себя повторение до тех пор, пока вторая разность (Δ1) не будет меньше или равной допустимой ошибке (T1).
2. Способ (100) по п. 1, согласно которому множество меток крыла являются вторичными метками (54) крыла,
причем вторичные метки крыла находятся в заданных относительных местоположениях относительно множества первичных меток (50) крыла, которые установлены (136) на узле (14) крыла в известных местоположениях относительно сопрягаемой поверхности (22) корневой части крыла узла крыла.
3. Способ (100) по п. 2, дополнительно включающий в себя установку (136) первичных меток (50) крыла на узле (14) крыла в местоположениях первичных меток крыла, относящихся к сопрягаемой поверхности (22) корневой части крыла,
причем каждое из местоположений первичных меток крыла независимо является известным местоположением, определенным при помощи измерения (138) местоположения первичной метки крыла соответствующей первичной метки крыла относительно сопрягаемой поверхности корневой части крыла.
4. Способ (100) по п. 2 или 3, дополнительно включающий в себя установку (140) вторичных меток (54) крыла на узле (14) крыла в местоположениях вторичных меток крыла, относящихся к известным местоположениям первичных меток (50) крыла.
5. Способ (100) по любому из пп. 1-4, дополнительно включающий в себя определение пути перемещения узла крыла относительно узла корпуса воздушного летательного аппарата.
6. Способ (100) по любому из пп. 1-5, согласно которому путь перемещения включает в себя последовательность точек (70) траектории между отделенным положением и положением сопряжения,
причем интервалы между последовательными точками траектории формируют убывающую последовательность интервалов.
7. Способ (100) по любому из пп. 1-6, дополнительно включающий в себя формирование (182) регулировочных прокладок (64) для установки между корневой частью (20) крыла узла (14) крыла и центропланом (30) узла (16) корпуса воздушного летательного аппарата (12), и дополнительно включающий в себя установку регулировочных прокладок по меньшей мере на корневой части крыла и/или центроплане до итеративного повторения (b).
8. Способ (100) по любому из пп. 1-7, дополнительно включающий в себя перемещение (122) на втором этапе, включающее:
(g) - после итеративного повторения (f), подачу (160) команды системе (58) позиционирования крыла переместить узел (14) крыла к третьей точке (70) траектории вдоль пути перемещения, причем
третья точка траектории находится ближе к положению сопряжения, чем вторая точка траектории, и
третью точку траектории выбирают для размещения узла (14) крыла и узла (16) корпуса воздушного летательного аппарата (12) в относительном положении на втором этапе;
(h) - после подачи команды (е) итеративное повторение следующего:
(i) - определение (162) положения узла (14) крыла на втором этапе путем автоматического измерения пространственных местоположений множества меток (50, 54) крыла на узле крыла,
(ii) - определение (164) положения узла (16) корпуса на втором этапе путем автоматического измерения пространственных местоположений множества меток (50, 54) корпуса на узле (16) корпуса,
(iii) - вычисление (166) действительного относительного положения на основе разности между положением узла (14) крыла на втором этапе и положением узла (16) корпуса на втором этапе,
(iv) - вычисление (168) третьей разности (Δ2) между действительным относительным положением и относительным положением на втором этапе, и
(v) - подача (160) команды системе (58) позиционирования крыла переместить узел (14) крыла для уменьшения величины третьей разности (Δ2) при условии, что величина третьей разности (Δ2) больше допустимой ошибки (Т2) на втором этапе,
причем итеративное повторение (h) включает в себя повторение до тех пор, пока третья разность (Δ2) не будет меньше или равной допустимой ошибке (Т2) на втором этапе.
9. Способ присоединения крыла к корпусу для присоединения узла (14) левого крыла и узла (14) правого крыла к узлу (16) корпуса воздушного летательного аппарата, включающий:
(a) выполнение способа (100) по любому из пп. 1-8 с узлом левого крыла и
(b) выполнение способа (100) по любому из пп. 1-8 с узлом правого крыла;
в котором выполнение (а) является по меньшей мере частично, одновременным с выполнением (b).
10. Способ присоединения крыла к корпусу для присоединения двух узлов крыльев к узлу корпуса воздушного летательного аппарата, включающий:
выполнение слева по борту перемещения узла левого крыла и левой стороны узла корпуса; и
выполнение справа по борту перемещения узла правого крыла и правой стороны узла корпуса;
причем перемещение слева по борту содержит:
(a) расчет виртуальной подгонки слева по борту узла левого крыла к левой стороне узла корпуса; и
(b) измерение 3D профиля сопрягаемой поверхности корневой части крыла узла левого крыла, измерение 3D профиля сопрягаемой поверхности центроплана левой стороны узла корпуса, причем расчет виртуальной подгонки слева по борту включает в себя расчет виртуальной подгонки слева по борту на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана;
(с) подачу команды системе позиционирования крыла переместить узел левого крыла к точке траектории слева по борту вдоль пути перемещения слева по борту, выбранной для размещения узла левого крыла и левой стороны узла корпуса в выбранном относительном положении слева по борту, причем выбранное относительное положение слева по борту определено виртуальной подгонкой слева по борту,
а путь перемещения слева по борту основан на действительных фактически выполненных формах узла левого крыла и левой стороны узла корпуса, при этом указанные действительные формы моделируют путем выполнения 3D сканирования; затем итеративное повторение следующего:
(i) - определение фактического положения узла левого крыла путем автоматического измерения пространственных местоположений множества меток левого крыла на узле левого крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества левых меток корпуса на левой стороне узла корпуса,
(iii) - вычисление фактического относительного положения слева по борту на основе разности между реальным положением узла левого крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности слева по борту между фактическим относительным положением слева по борту и выбранным относительным положением слева по борту, и
(v) - подача команды системе позиционирования крыла переместить узел левого крыла для уменьшения величины позиционной разности слева по борту при условии, что величина позиционной разности слева по борту больше допустимой ошибки,
причем итеративное повторение перемещения слева по борту включает в себя повторение до тех пор, пока величина позиционной разности слева по борту не будет меньше или равной допустимой ошибке;
при этом перемещение справа по борту содержит:
(a) расчет виртуальной подгонки справа по борту узла правого крыла к правой стороне узла корпуса; и
(b) измерение 3D профиля сопрягаемой поверхности корневой части крыла узла правого крыла, измерение 3D профиля сопрягаемой поверхности центроплана правой стороны узла корпуса, причем расчет виртуальной подгонки справа по борту включает в себя расчет виртуальной подгонки справа по борту на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана;
(с) подачу команды системе позиционирования крыла переместить узел правого крыла в точку траектории справа по борту вдоль пути перемещения справа по борту, выбранную для размещения узла правого крыла и правой стороны узла корпуса в выбранном относительном положении справа по борту, причем выбранное относительное положение справа по борту определено виртуальной подгонкой справа по борту,
а путь перемещения справа по борту основан на действительных фактически выполненных формах узла правого крыла и правой стороны узла корпуса, при этом указанные действительные формы моделируют путем выполнения 3D сканирования; затем итеративное повторение следующего:
(i) - определение фактического положения узла правого крыла путем автоматического измерения пространственных местоположений множества меток правого крыла на узле правого крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества правых меток корпуса на правой стороне узла корпуса,
(iii) - вычисление фактического относительного положения справа по борту на основе разности между реальным положением узла правого крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности справа по борту между фактическим относительным положением справа по борту и выбранным относительным положением справа по борту, и
(v) - подача команды системе позиционирования крыла переместить узел правого крыла для уменьшения величины позиционной разности справа по борту при условии, что величина позиционной разности справа по борту больше допустимой ошибки,
причем итеративное повторение перемещения справа по борту включает в себя повторение до тех пор, пока величина позиционной разности справа по борту не будет меньше или равной допустимой ошибке.
11. Способ по п. 10, согласно которому выполнение перемещения слева по борту выполняют по меньшей мере частично одновременно с выполнением перемещения справа по борту.
12. Способ по п. 10, включающий в себя
выполнение перемещения слева по борту с использованием последовательности точек траектории слева по борту вдоль пути перемещения слева по борту узла левого крыла к левой стороне узла корпуса, и
выполнение перемещения справа по борту с использованием последовательности точек траектории справа по борту вдоль пути перемещения справа по борту узла правого крыла к правой стороне узла корпуса,
причем последовательность точек траектории слева по борту включает в себя конечную точку траектории слева по борту, в которой узел левого крыла сопряжен с левой стороной узла корпуса,
причем последовательность точек траектории справа по борту включает в себя конечную точку траектории справа по борту, в которой узел правого крыла сопряжен с правой стороной узла корпуса.
13. Способ по п. 10, согласно которому точка траектории слева по борту соответствует виртуальной подгонке слева по борту, и точка траектории справа по борту соответствует виртуальной подгонке справа по борту.
14. Способ по п. 13, дополнительно включающий в себя прогнозное регулирование прокладками на основе виртуальной подгонки слева по борту и виртуальной подгонки справа по борту.
15. Способ по п. 10, дополнительно включающий
формирование регулировочных прокладок для установки между корневой частью левого крыла узла левого крыла и левой частью центроплана узла корпуса на основе виртуальной подгонки слева по борту,
дополнительно включающий формирование регулировочных прокладок для установки между корневой частью правого крыла узла правого крыла и правой частью центроплана узла корпуса на основе виртуальной подгонки справа по борту, и
дополнительно включающий установку регулировочных прокладок по меньшей мере на одном объекте из корневой части левого крыла, левой части центроплана, корневой части правого крыла и правой части центроплана до выполнения перемещения слева по борту и выполнения перемещения справа по борту.
16. Способ присоединения крыла к корпусу воздушного летательного аппарата, включающий:
расчет виртуальной подгонки узла крыла к узлу корпуса воздушного летательного аппарата; и
измерение 3D профиля сопрягаемой поверхности корневой части крыла узла крыла, измерение 3D профиля сопрягаемой поверхности центроплана узла корпуса, причем расчет виртуальной подгонки включает в себя расчет виртуальной подгонки на основе 3D профиля сопрягаемой поверхности корневой части крыла и 3D профиля сопрягаемой поверхности центроплана;
подачу команды системе позиционирования крыла переместить узел крыла воздушного летательного аппарата в точку траектории вдоль пути перемещения узла крыла к узлу корпуса воздушного летательного аппарата, при этом точки траектории выбирают для размещения узла крыла и узла корпуса в выбранном относительном положении, причем выбранное относительное положение определено виртуальной подгонкой, а
путь перемещения основан на действительных фактически выполненных формах узла крыла и узла корпуса, при этом указанные действительные формы моделируют путем выполнения 3D сканирования;
затем итеративное повторение следующего:
(i) - определение фактического положения узла крыла путем автоматического измерения пространственных местоположений множества меток крыла на узле крыла,
(ii) - определение фактического положения узла корпуса путем автоматического измерения пространственных местоположений множества меток корпуса на узле корпуса,
(iii) - вычисление фактического относительного положения на основе разности между реальным положением узла крыла и реальным положением узла корпуса,
(iv) - вычисление позиционной разности между реальным относительным положением и выбранным относительным положением и
(v) - подача команды системе позиционирования крыла переместить узел крыла для уменьшения величины позиционной разности при условии, что величина позиционной разности больше допустимой ошибки,
при этом итеративное повторение включает в себя повторение до тех пор, пока величина позиционной разности не будет меньше или равной допустимой ошибке.
17. Способ по п. 16, согласно которому метки крыла являются вторичными метками крыла, причем вторичные метки крыла находятся в заданных относительных местоположениях относительно множества первичных меток крыла, установленных на узле крыла в известных местоположениях относительно сопрягаемой поверхности корневой части крыла узла крыла, а
метки корпуса являются вторичными метками корпуса, причем вторичные метки корпуса находятся в заданных относительных местоположениях относительно множества первичных меток корпуса, установленных на узле корпуса в известных местоположениях относительно сопрягаемой поверхности центроплана узла корпуса.
18. Способ по п. 16, который включает в себя выполнение перемещения слева по борту с использованием последовательности точек траектории слева по борту вдоль пути перемещения слева по борту узла левого крыла к левой стороне узла корпуса, и выполнение перемещения справа по борту с использованием последовательности точек траектории справа по борту вдоль пути перемещения справа по борту узла правого крыла к правой стороне узла корпуса.
19. Способ по п. 18, согласно которому последовательность точек траектории слева по борту включает в себя конечную точку траектории слева по борту, в которой узел левого крыла сопряжен с левой стороной узла корпуса, а
последовательность точек траектории справа по борту включает в себя конечную точку траектории справа по борту, в которой узел правого крыла сопряжен с правой стороной узла корпуса.
20. Способ по п. 16, дополнительно включающий в себя расчет виртуальной подгонки слева по борту узла левого крыла к левой стороне узла корпуса и расчет виртуальной подгонки справа по борту узла правого крыла к правой стороне узла корпуса,
причем точка траектории слева по борту соответствует виртуальной подгонке слева по борту, и точка траектории справа по борту соответствует виртуальной подгонке справа по борту.
| US 20050172470 A1, 11.08.2005 | |||
| Устройство для защиты от замыкания фазы на землю в сети переменного тока | 1981 |
|
SU957336A1 |
| US 20060137164 A1, 29.06.2006 | |||
| US 20140365061 A1, 11.12.2014 | |||
| Способ сборки крыла с фюзеляжем | 1990 |
|
SU1821432A1 |

