Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к способам и устройству для преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации и, более конкретно, но не исключительно, к адаптивному преобразованию первой частоты дискретизации, которая подвергается отклонению от номинального значения, во вторую частоту дискретизации, которая находится в пределах заданного коэффициента ошибки повторной синхронизации относительно целевого значения.
Уровень техники
В цифровых системах, касающихся обработки данных выборки, может потребоваться преобразовывать частоту дискретизации данных выборки из одной в другую. Например, система датчиков, таких как акселерометр в транспортном средстве, может осуществлять выборку данных с первой частотой, и эта система датчиков может быть связана с системой цифровой обработки, которая обрабатывает данные выборки с другой частотой. Синхронизирующие сигналы для датчика и цифрового процессора могут генерироваться разными генераторами, функционирующими независимо друг от друга, таким образом, что точное соотношение между первой и второй частотами неизвестно и может быть подвержено изменчивости, вызванной, например, температурой, и изменчивости между модулями. В частности, датчик может иметь внутренний генератор, имеющий низкую точность, которая может подвергаться отклонению от номинального значения на ±10 % или более, например, из-за использования резистивно-ёмкостного (RC) или индуктивно-ёмкостного (LC) генератора, а система цифровой обработки может иметь очень точные часы на основе кварцевого генератора. Для того чтобы обрабатывать данные выборки эффективно, может потребоваться произвести повторную синхронизацию данных выборки в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения.
Известно преобразование первой частоты дискретизации данных выборки во вторую частоту дискретизации с помощью повышения дискретизации до более высокой частоты дискретизации, которая кратна как первой, так и второй частотам дискретизации, фильтрации данных, подвергавшихся повышению дискретизации, с использованием интерполяционного фильтра, а затем понижения дискретизации до второй частоты дискретизации. Однако для реализации такой системы, когда соотношение между частотами дискретизации подвержено изменчивости в широком диапазоне, может потребоваться широкий диапазон коэффициентов повышения и понижения дискретизации, а это может привести к высокой сложности системы. В частности, каждое сочетание коэффициентов повышения и понижения дискретизации может потребовать использование разных коэффициентов фильтрации для интерполяционного фильтра, а это в свою очередь, может потребовать ресурсы памяти в дополнение к усложнению системы.
Сущность изобретения
В соответствии с первым аспектом настоящего изобретения, обеспечивается способ преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации, при этом первая частота дискретизации подвергается отклонению от номинального значения, а вторая частота дискретизации находится в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения, способ содержит:
измерение первой частоты дискретизации;
задание первого коэффициента повышения дискретизации на основе, содержащей: измеренную первую частоту дискретизации, целевое значение второй частоты дискретизации и коэффициент ошибки повторной синхронизации, при этом первый коэффициент повышения дискретизации ограничивается таким образом, что он является целочисленной степенью заданного целочисленного значения; а также
получение из эталонного набора коэффициентов фильтрации и из отношения первого коэффициента повышения дискретизации к эталонному коэффициенту повышения дискретизации первого набора коэффициентов фильтрации для использования в первом интерполяционном фильтре, при этом эталонный набор коэффициентов фильтрации предназначается для эталонного коэффициента повышения дискретизации, то есть целочисленной степени заданного целочисленного значения.
Это делает возможной реализацию, имеющую сниженную сложность, и имеющую сниженную потребность в ресурсах памяти для хранения коэффициентов фильтрации. В частности, ограничение первого коэффициента повышения дискретизации, чтобы он представлял собой целочисленную степень заданного целочисленного значения, обычно степень составляет 2, ограничивает диапазон возможных коэффициентов повышения дискретизации и может, соответственно, снизить сложность системы, а получение тех же коэффициентов фильтрации для использования в первом интерполяционном фильтре из эталонного набора коэффициентов фильтрации, что и для эталонного коэффициента повышения дискретизации, то есть также целочисленной степени заданного целочисленного значения, может уменьшить потребность в ресурсах памяти для хранения коэффициентов фильтрации.
В варианте осуществления изобретения получение первого набора коэффициентов фильтрации из эталонного набора коэффициентов фильтрации содержит:
если первый коэффициент повышения дискретизации больше эталонного коэффициента повышения дискретизации, линейную интерполяцию между эталонными наборами коэффициентов фильтрации*;
если первый коэффициент повышения дискретизации равен эталонному коэффициенту повышения дискретизации, установку их равными с эталонным набором коэффициентов фильтрации из; а также
если первый коэффициент повышения дискретизации меньше эталонного коэффициента повышения дискретизации, равномерное прореживание из эталонного набора коэффициентов фильтрации, при этом коэффициент прореживания равномерного прореживания равен целочисленному отношению эталонного коэффициента повышения дискретизации к первому коэффициенту повышения дискретизации.
Это обеспечивает эффективный в вычислительном отношении способ получения набора коэффициентов фильтрации для интерполяционного фильтра благодаря простоте линейной интерполяции и равномерной понижающей дискретизации при одновременном снижении требований к ресурсам памяти, благодаря тому, что в памяти сохраняется только один набор коэффициентов, набор эталонных коэффициентов фильтрации.
В варианте осуществления изобретения заданное целочисленное значение равно 2.
Это обеспечивает очень эффективную реализацию.
В варианте осуществления изобретения первый интерполяционный фильтр и эталонный интерполяционный фильтр являются многофазными фильтрами. Первый интерполяционный фильтр имеет число фаз, равное первому коэффициенту повышения дискретизации, а эталонный интерполяционный фильтр имеет число фаз, равное эталонному коэффициенту повышения дискретизации.
Это обеспечивает эффективную реализацию.
В варианте осуществления изобретения способ содержит:
задание первого коэффициента понижения дискретизации на основе, содержащей: измеренную первую частоту дискретизации, целевое значение второй частоты дискретизации и заданный коэффициент ошибки повторной синхронизации, при этом первый коэффициент понижения дискретизации является целым числом; а также
преобразование потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации с помощью процессов, включающих в себя повышающую дискретизацию с помощью первого коэффициента повышения дискретизации, фильтрацию с использованием первого набора коэффициентов фильтрации для первого интерполяционного фильтра и понижающую дискретизацию с помощью первого коэффициента понижения дискретизации.
Задание первой частоты понижения дискретизации на основе, включающей в себя частоту повышения дискретизации, позволяет выбирать частоты повышения и понижения дискретизации, которые обеспечивают преобразование частоты дискретизации в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения второй частоты дискретизации.
В варианте осуществления изобретения задание первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации содержит:
задание отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации; а также
выбор значения первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации таким образом, чтобы коэффициент ошибки между отношением целевого значения второй частоты дискретизации к первой частоте дискретизации, и отношением первого коэффициента повышения дискретизации к первому коэффициенту понижения дискретизации был меньше, чем заданный коэффициент ошибки повторной синхронизации.
В варианте осуществления изобретения способ содержит:
выбор пробного значения первого коэффициента повышения дискретизации;
задание пробного значения первого коэффициента понижения дискретизации на основе заданного отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации и на основе выбранного пробного значения первого коэффициента повышения дискретизации;
вычисление коэффициента ошибки повторной синхронизации на основе пробных значений первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации;
если коэффициент ошибки повторной синхронизации больше порогового значения, итерационное увеличение пробного значения первого коэффициента повышения дискретизации и пробного значения первого коэффициента понижения дискретизации, а также вычисление коэффициента ошибки повторной синхронизации; и
выбор соответствующего значения увеличенного первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации, которое даёт коэффициент ошибки повторной синхронизации, меньший или равный пороговому значению.
Это обеспечивает эффективный способ итерационного задания коэффициентов повышения и понижения дискретизации.
В варианте осуществления изобретения отклонение от номинального значения первой частоты дискретизации может быть больше ± 1 %, и может превышать ± 10 %.
В соответствии со вторым аспектом изобретения, обеспечивается устройство для преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации, при этом первая частота дискретизации подвергается отклонению от номинального значения, а вторая частота дискретизации находится в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения, при этом устройство выполняется с возможностью выполнять заявленный способ.
В соответствии с третьим аспектом изобретения обеспечивается система датчиков для транспортного средства, содержащая:
датчик МЭМС (микроэлектромеханическая система, MEMS), выполненный с возможностью генерировать поток выборок с первой частотой дискретизации;
систему обработки данных, выполненную с возможностью принимать поток выборок со второй частотой дискретизации; а также
заявленное устройство для преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации.
Дополнительные признаки и преимущества изобретения будут очевидны из последующего описания показательных вариантов осуществления изобретения, которые приводятся только в качестве примера.
Краткое описание чертежей
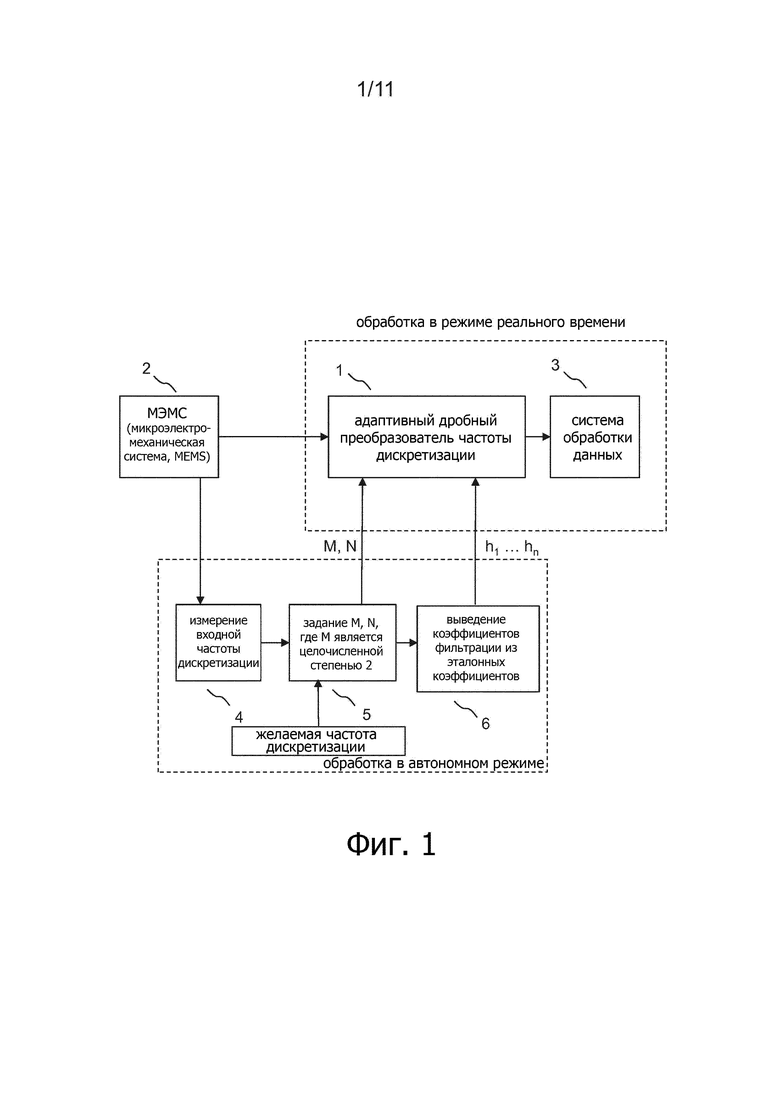
Фиг. 1 является принципиальной схемой, иллюстрирующей систему преобразования частоты дискретизации в варианте осуществления изобретения;
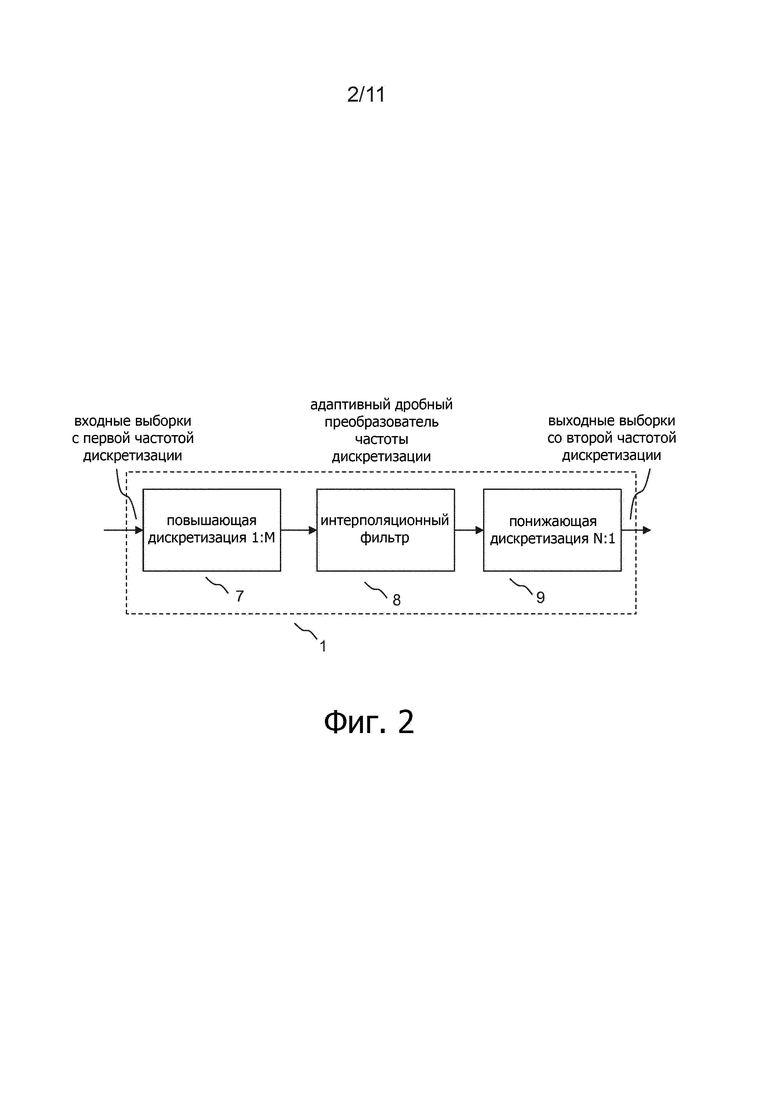
Фиг. 2 является функциональной принципиальной схемой, иллюстрирующей адаптивный дробный преобразователь частоты дискретизации в варианте осуществления изобретения;
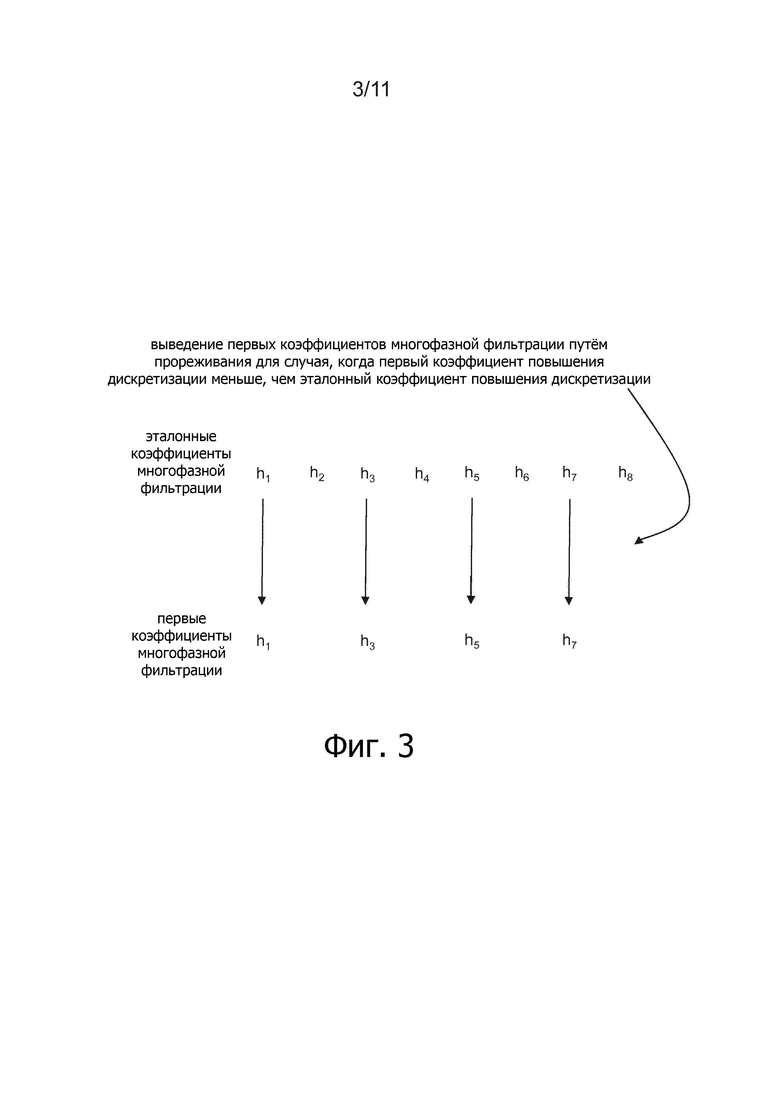
Фиг. 3 является принципиальной схемой, иллюстрирующей получение коэффициентов многофазного фильтра путём прореживания для случая, когда коэффициент повышения дискретизации меньше эталонного коэффициента повышения дискретизации в варианте осуществления изобретения;
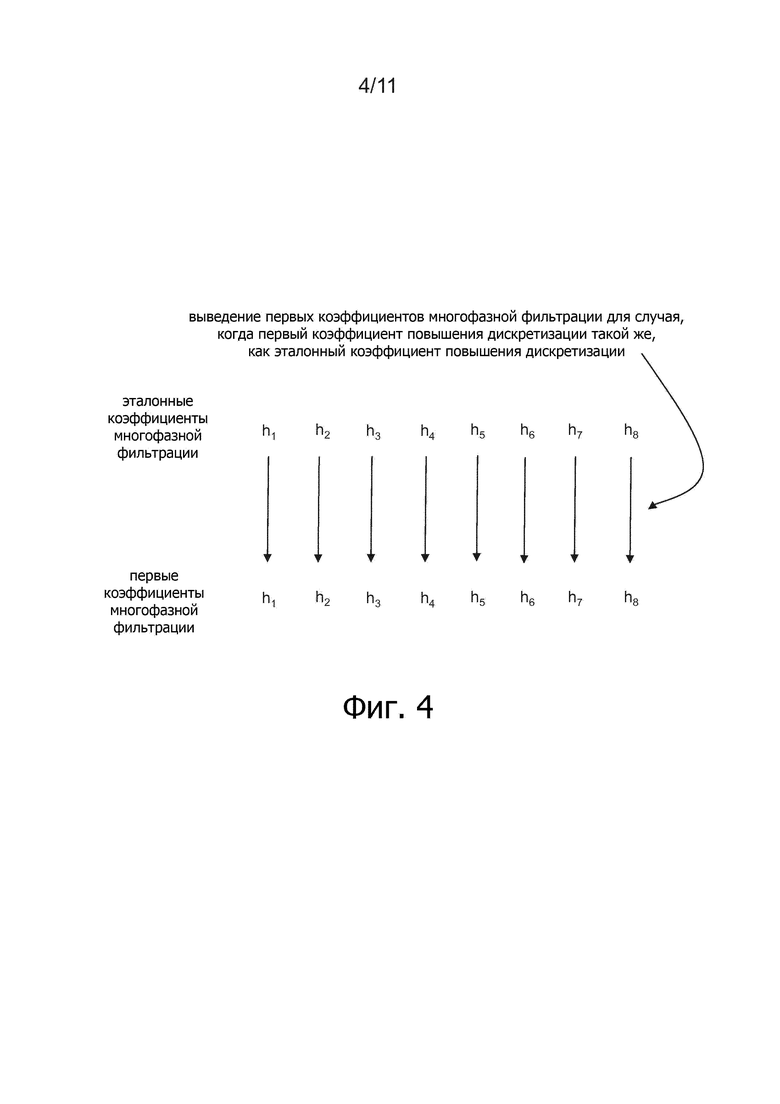
Фиг. 4 является принципиальной схемой, иллюстрирующей получение коэффициентов многофазного фильтра для случая, когда коэффициент повышения дискретизации является таким же, как эталонный коэффициент повышения дискретизации в варианте осуществления изобретения (в этом примере: Mref / M = 2);
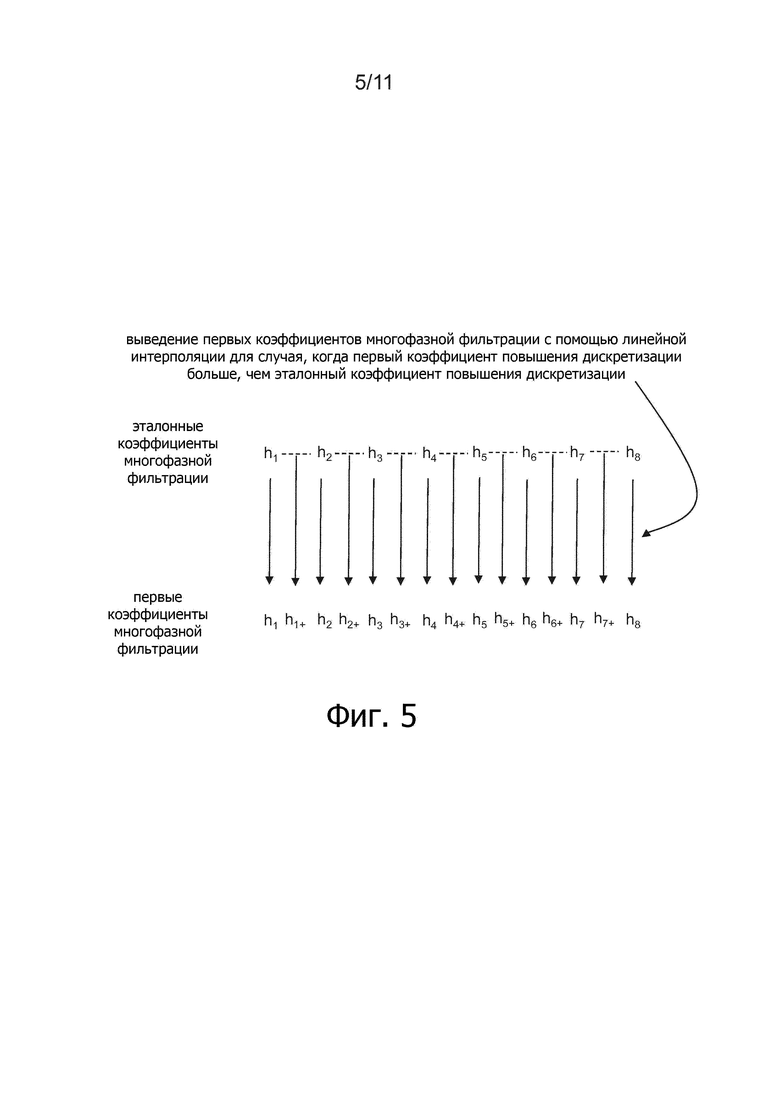
Фиг. 5 является принципиальной схемой, иллюстрирующей получение коэффициентов многофазного фильтра путём интерполяции для случая, когда коэффициент повышения дискретизации больше, чем эталонный коэффициент повышения дискретизации в варианте осуществления изобретения (в этом примере: M / Mref = 2);
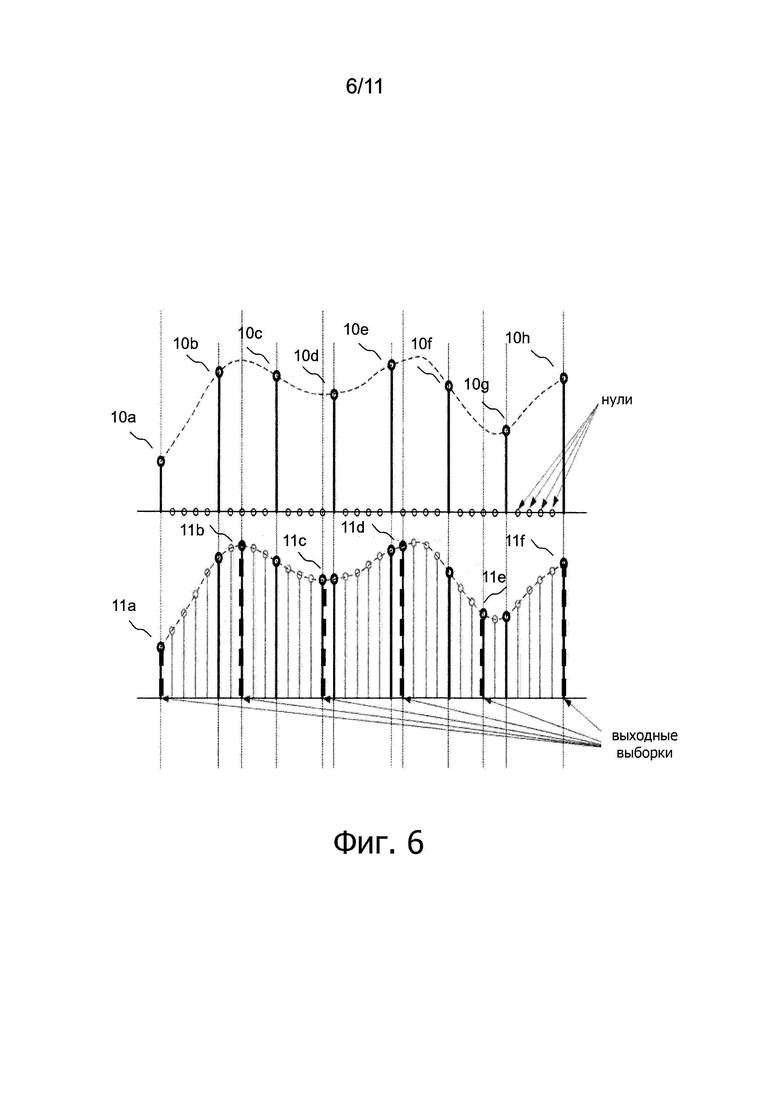
Фиг. 6 является принципиальной схемой, иллюстрирующей интерполяцию в варианте осуществления изобретения;
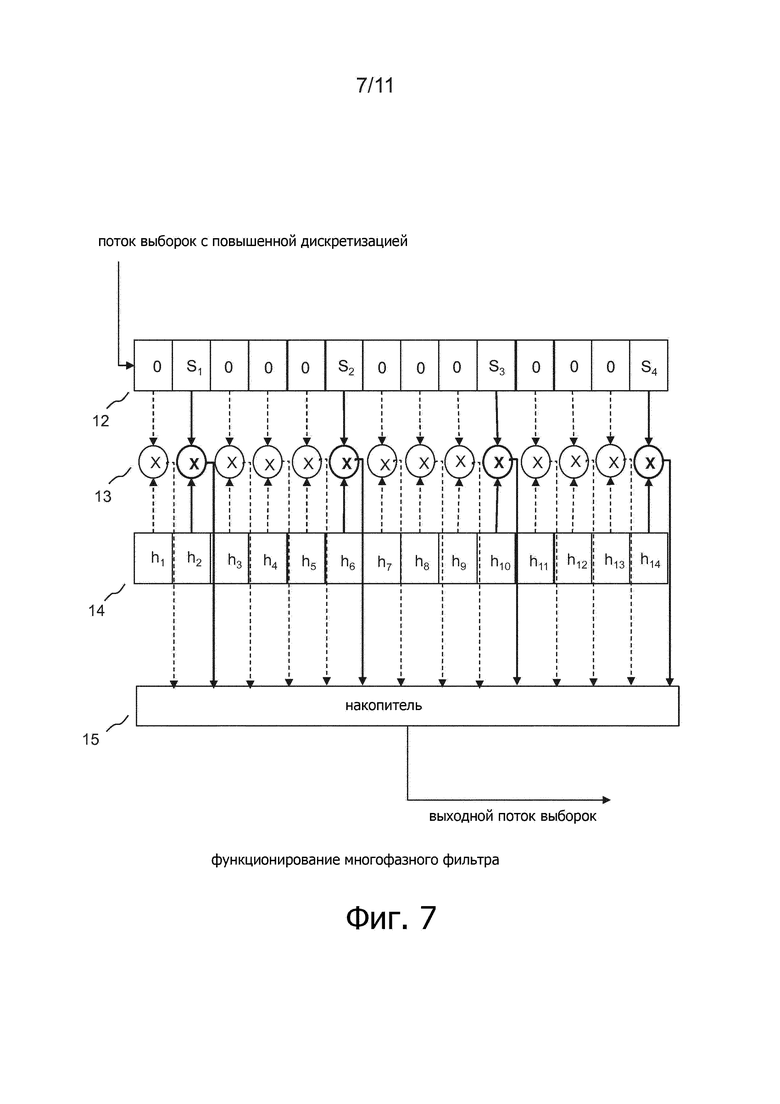
Фиг. 7 является принципиальной схемой, иллюстрирующей функционирование многофазного фильтра в варианте осуществления изобретения;
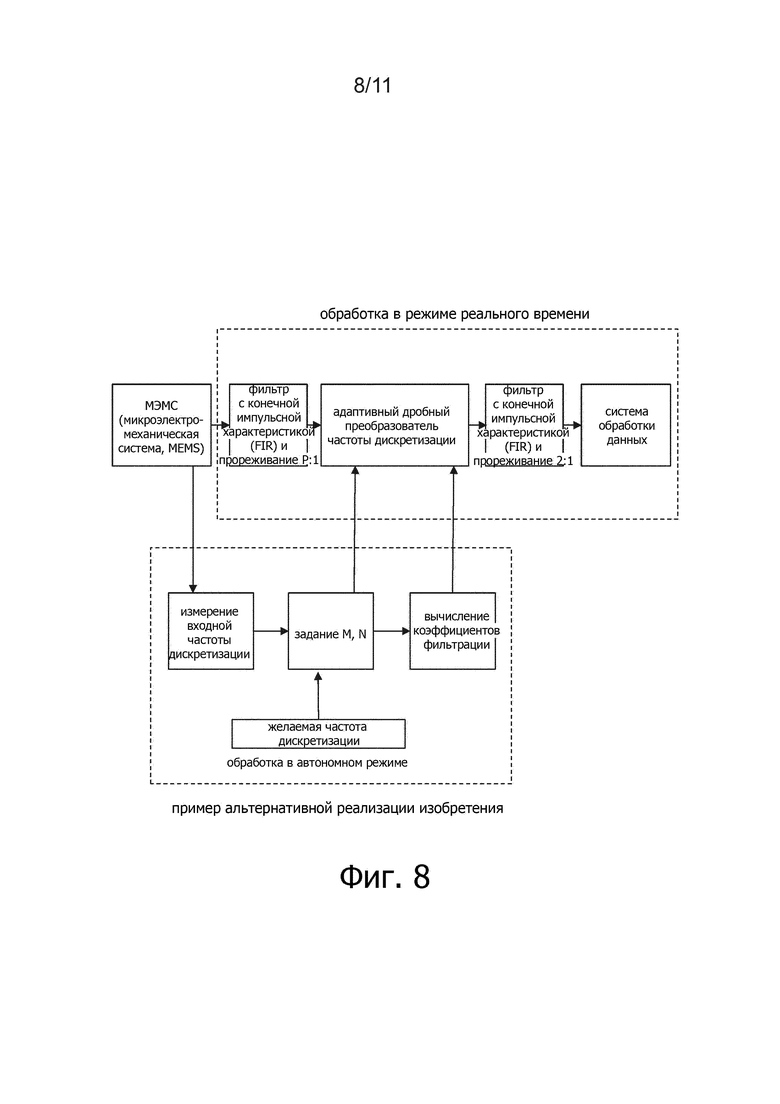
Фиг. 8 является принципиальной схемой, иллюстрирующей систему преобразования частоты дискретизации в альтернативном варианте осуществления изобретения, который может обеспечить гибкую выходную частоту дискретизации, которая может масштабироваться с помощью настраиваемого коэффициента P;
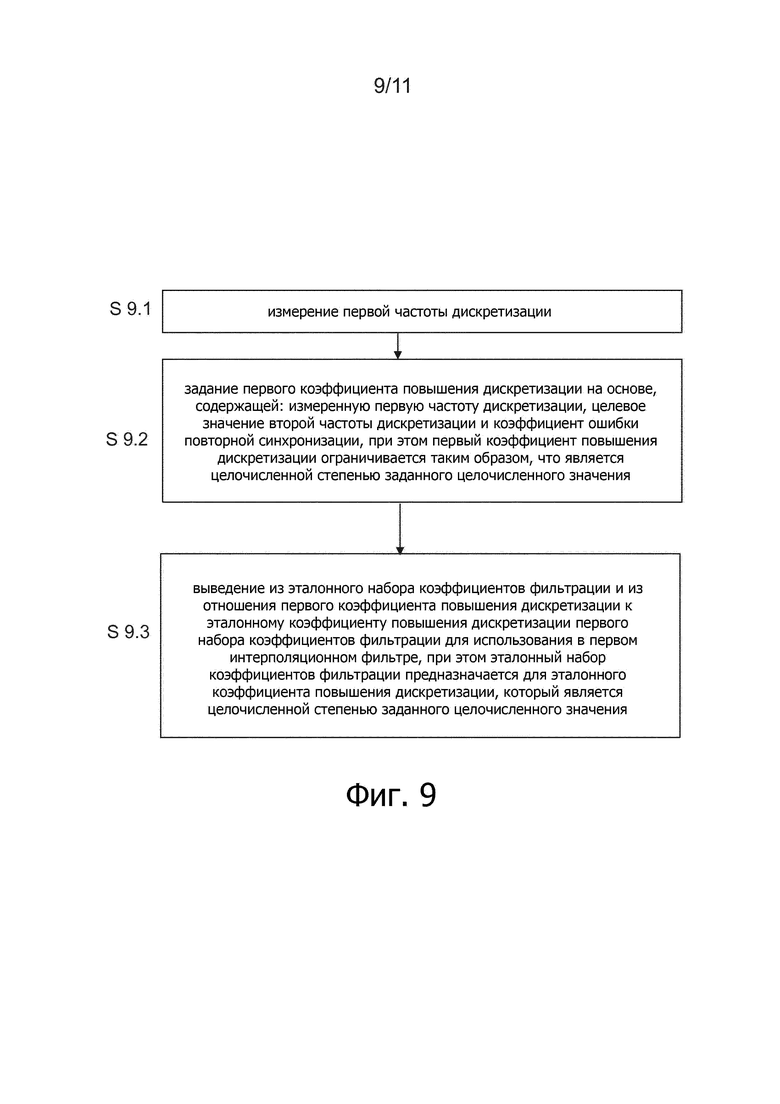
Фиг. 9 является блок-схемой последовательности операций способа в соответствии с вариантом осуществления изобретения, содержащим задание коэффициента повышения дискретизации и выбор набора коэффициентов фильтрации; а также
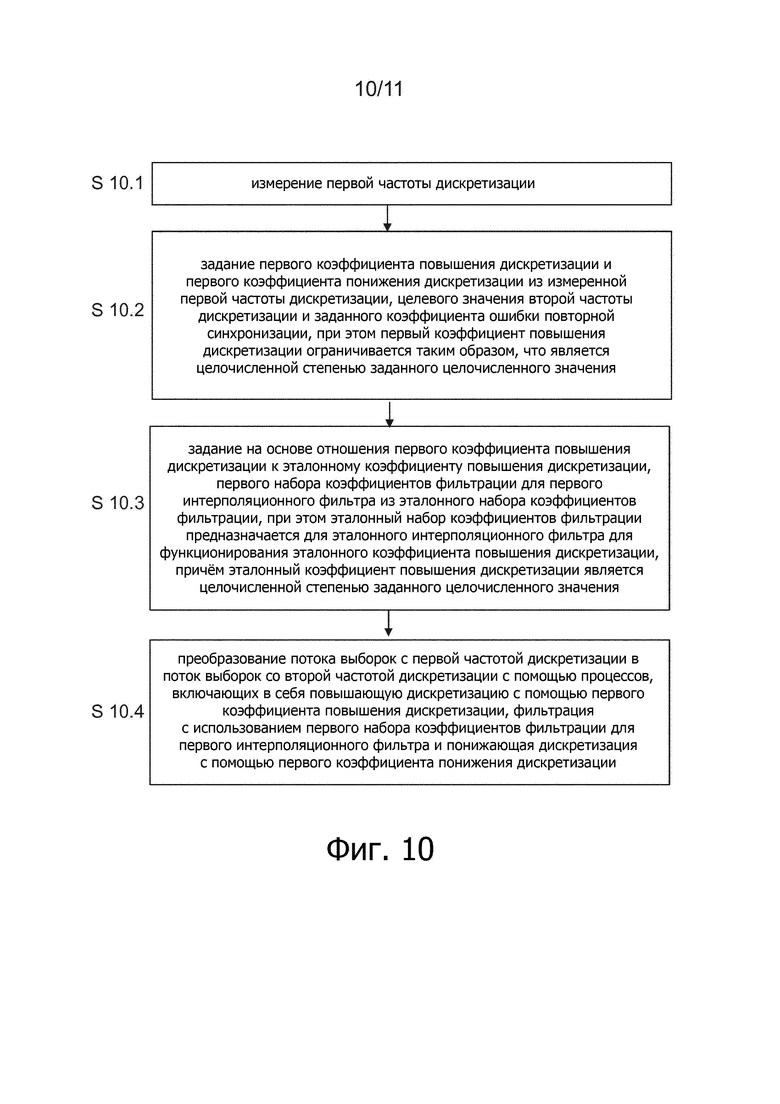
Фиг. 10 является блок-схемой последовательности операций способа преобразования частоты дискретизации в варианте осуществления изобретения; а также
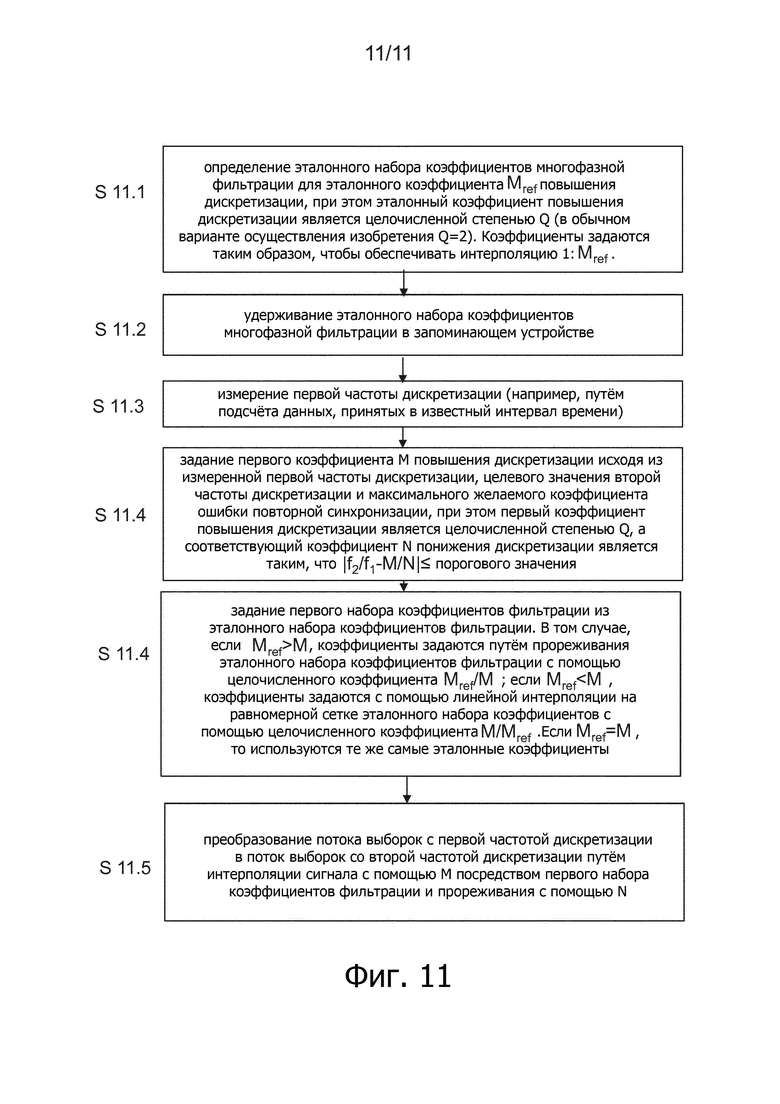
Фиг. 11 является дополнительной блок-схемой последовательности операций способа преобразования частоты дискретизации в варианте осуществления изобретения.
Подробное описание изобретения
Сейчас варианты осуществления изобретения будут описаны в качестве примера в контексте системы датчиков ускорения для транспортного средства, содержащей МЭМС (микроэлектромеханическую систему, MEMS), выполненную с возможностью генерировать поток выборок с первой частотой дискретизации, и систему обработки данных, выполненную с возможностью принимать поток выборок со второй частотой дискретизации. При этом подразумевается, что варианты осуществления изобретения могут относиться к другим вариантам применения, и что варианты осуществления изобретения не ограничиваются использованием в транспортных средствах или системах датчиков типа МЭМС. Варианты осуществления изобретения могут относиться к другим системам обработки данных, включающим в себя преобразование частоты дискретизации.
Фиг.1 показывает систему преобразования частоты дискретизации в варианте осуществления изобретения. Датчик 2 ускорения МЭМС подсоединяется через функцию 1 адаптивного дробного преобразователя частоты дискретизации к функции 3 системы обработки данных. Функция 1 адаптивного дробного преобразователя частоты дискретизации более подробно показывается на фиг. 2. Поток выборок с первой частотой дискретизации подвергается повышению 7 дискретизации с помощью коэффициента M повышения дискретизации, поток выборок с повышенной дискретизацией пропускается через интерполяционный фильтр 8, который может быть многофазным фильтром, и подвергается понижению 9 дискретизации с помощью коэффициента N понижения дискретизации до второй частоты дискретизации. Таким образом, поток выборок с первой частотой дискретизации преобразуется в поток выборок со второй частотой дискретизации.
Первая частота дискретизации подвергается отклонению от номинального значения, которое может превышать ± 1 % и может превышать ± 10 % от номинального значения. Вторая частота дискретизации находится в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения.
Например, первая частота дискретизации может составлять (1344 ± 10 %) Гц, а целевое номинальное значение второй частоты дискретизации может составлять 200 Гц. Заданный коэффициент ошибки повторной синхронизации по отношению к номинальному значению может быть, например, коэффициентом между 10 и 100 частями на миллион (PPM), то есть, другими словами 10-5 - 10-4. Коэффициент ошибки не ограничивается этими значениями, но обычно указывается, что он ниже отклонения частоты от первой частоты дискретизации.
Как показано на фиг. 1, адаптивный дробный преобразователь 1 частоты дискретизации и система 3 обработки данных могут осуществлять обработку в режиме реального времени, то есть, другими словами обработка выполняется в потоке данных, принимаемых от МЭМС с частотой, которая является достаточной для того чтобы непрерывный поток с первой частотой данных мог быть обработан.
Как также показано на фиг. 1, параметры для управления адаптивным дробным преобразователем 1 частоты дискретизации могут быть вычислены при автономной обработке, то есть не в режиме реального времени, потенциально осуществляя обработку с более медленной скоростью, чем обработка в режиме реального времени. Например, обработка в режиме реального времени может быть реализована в программно-аппаратном обеспечении, например, таком как программируемая матрица логических элементов, а автономная обработка может быть реализована в программном обеспечении, например, в программном обеспечении, выполняемом управляющим процессором, таким как микроконтроллер. Устройство цифровой обработки сигналов может быть запрограммировано для выполнения функций в режиме реального времени. Управляющий процессор и логические и/или цифровые сигнальные процессоры могут быть интегрированы в специализированную интегральную схему (ASIC). Альтернативно, варианты осуществления изобретения могут быть реализованы различными другими способами, включающими в себя программное обеспечение в форме исполняемого кода, хранящегося в памяти, выполненного с возможностью вызывать выполнение одним или более процессоров способов в соответствии с вариантами осуществления изобретения.
Как показано на фиг. 1, параметры для управления адаптивным дробным преобразователем частоты дискретизации включают в себя коэффициент M повышения дискретизации, коэффициент N понижения дискретизации и коэффициенты фильтрации для интерполяционного фильтра h1-hn. Как показано на фиг. 1, измерение первой частоты дискретизации обозначается цифровой позицией 4. Это измерение может быть выполнено, например, путём подсчёта выборок, принятых от датчика МЭМС в течение известного интервала времени. Известный интервал времени может быть рассчитан, например, на основе часов системы обработки данных, которая может иметь точный генератор с кварцевой стабилизацией частоты. Коэффициент М повышения дискретизации определяется цифровой позицией 5, исходя из измеренной первой частоты дискретизации, целевого значения второй частоты дискретизации и коэффициента ошибки повторной синхронизации.
В варианте осуществления изобретения коэффициент повышения дискретизации ограничивается таким образом, что он является целочисленной степенью заданного целочисленного значения. В примере, показанном на фиг. 1, заданное целочисленное значение равно 2, таким образом коэффициент повышения дискретизации ограничивается степенью 2. Как будет разъясняться в дальнейшем, это значительно уменьшает сложность реализации благодаря уменьшению диапазона возможных коэффициентов повышения частоты дискретизации и, следовательно, уменьшению требуемого диапазона изменения интерполяционного фильтра. Диапазон изменения коэффициентов фильтрации, которые должны храниться в памяти, соответственно, уменьшается, что снижает потребность в ресурсах системной памяти.
Как также показано на фиг. 1, первый набор коэффициентов h1 – hn фильтрации выводится для использования в интерполяционном фильтре из эталонного набора коэффициентов фильтрации. Эталонный набор коэффициентов фильтрации означает эталонный коэффициент повышения частоты дискретизации, которая также является целочисленной степенью заданного целочисленного значения, в этом примере степенью 2. Способ, используемый для выведения первого набора коэффициентов фильтрации из эталонного набора коэффициентов фильтрации, зависит от отношения коэффициента повышения дискретизации к эталонному коэффициенту повышения дискретизации.
Фиг. 3, 4 и 5 иллюстрируют выведение первого набора коэффициентов фильтрации из эталонного набора коэффициентов фильтрации для различных случаев отношения коэффициента повышения дискретизации к эталонному коэффициенту повышения дискретизации на примере случая, когда заданный целочисленный коэффициент равен 2. Фиг. 5 иллюстрирует, что, если коэффициент повышения дискретизации больше, чем эталонный коэффициент повышения дискретизации, первый набор коэффициентов фильтрации определяется путём линейной интерполяции между эталонными коэффициентами фильтрации, то есть эталонного набора коэффициентов фильтрации. Фиг. 4 иллюстрирует, что если коэффициент повышения дискретизации равен эталонному коэффициенту повышения дискретизации, то первый набор коэффициентов фильтрации задаётся равным эталонным коэффициентам фильтрации. Фиг. 6* иллюстрирует, что, если коэффициент повышения дискретизации меньше эталонного коэффициента повышения дискретизации, первый набор коэффициентов фильтрации определяется путём равномерного прореживания из эталонных коэффициентов фильтрации, при этом коэффициент прореживания равен целочисленному отношению эталонного коэффициента повышения дискретизации к коэффициенту повышения дискретизации. Это обеспечивает эффективный в вычислительном отношении способ получения набора коэффициентов фильтрации для интерполяционного фильтра, в то же время уменьшая требования к ресурсам памяти для хранения коэффициентов фильтрации.
Фиг. 6 иллюстрирует функционирование интерполяционного фильтра. На фиг. можно увидеть, что в этом примере входные выборки 10a - 10h имеют первую частоту дискретизации, которая меньше, чем частота дискретизации выходных выборок 11a - 11f. Может показаться*, что входная частота дискретизации повышается до более высокой промежуточной частоты путём добавления нулевых выборок между входными выборками. Влияние интерполяционного фильтра заключается в заполнении плавно изменяющихся значений между входными выборками, как показано на фигуре. Затем выходные выборки 11a - 11f могут быть выбраны, для того чтобы включать в себя интерполированные значения, в зависимости от ситуации, на второй частоте дискретизации. Интерполяционный фильтр обычно является фильтром с конечной импульсной характеристикой (FIR) и может быть многофазным фильтром.
Фиг. 7 иллюстрирует функционирование многофазного фильтра. Показывается поток 12 выборок с повышенной дискретизацией, который содержит входные выборки S1 - S4, между которыми были добавлены нулевые выборки. Каждая выборка из потока выборок с повышенной дискретизацией умножается, как обозначено цифровой позицией 13, на соответствующий коэффициент фильтрации h1 - h14, как обозначено цифровой позицией 14. Результаты каждого умножения накапливаются, как обозначено цифровой позицией 15, и формируют выходной поток выборок. Выходной поток выборок может затем подвергаться понижающей дискретизации для формирования потока со второй частотой дискретизации. Фиг. 7 показывает снимок во времени. На следующем цикле тактовых импульсов с повышенной частотой дискретизации входной поток выборок переместится на одну позицию вправо. В любой момент времени не все множители активны, так как многие из множителей имеют нулевой ввод. Это эквивалентно сохранению только ненулевых выборок, т. е. уменьшению требуемого регистра выборок на коэффициент M и изменению коэффициентов h в соответствии с выборкой для вывода. Кроме того, вычисление выходных выборок необходимо выполнять только для подмножества выборок, которые будут выбраны при понижении дискретизации. Таким образом, многофазный фильтр обеспечивает эффективную реализацию с точки зрения использования ресурсов обработки сигналов.
В варианте осуществления изобретения первый интерполяционный фильтр и эталонный интерполяционный фильтр являются многофазными фильтрами. Первый интерполяционный фильтр обычно имеет число фаз, равное коэффициенту повышения дискретизации, а эталонный интерполяционный фильтр обычно имеет число фаз, равное эталонному коэффициенту повышения дискретизации. Количество фаз на единицу больше, чем количество нулей, добавленных для каждой входной выборки. В примере на фиг. 7 многофазный фильтр имеет 4 фазы.
В варианте осуществления изобретения коэффициент понижения дискретизации может быть определён из измеренной первой частоты дискретизации, целевого значения второй частоты дискретизации и заданного коэффициента ошибки повторной синхронизации. Коэффициент понижения дискретизации имеет целочисленное значение. Поток выборок с первой частотой дискретизации может быть преобразован в поток выборок со второй частотой дискретизации с помощью процессов, включающих в себя повышение дискретизации с помощью коэффициента повышения дискретизации, фильтрацию с использованием первого набора коэффициентов фильтрации для первого интерполяционного фильтра и понижение дискретизации с помощью коэффициента понижения дискретизации.
Коэффициент повышения дискретизации и коэффициент понижения дискретизации могут быть заданы посредством задания отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации и выбора значения коэффициента повышения дискретизации и коэффициента понижения дискретизации таким образом, чтобы коэффициент ошибки между отношением целевого значения второй частоты дискретизации к первой частоте дискретизации и отношением коэффициента повышения дискретизации к коэффициенту понижения дискретизации был меньше, чем заданный коэффициент ошибки повторной синхронизации. Это может быть реализовано, например, посредством интерактивного процесса следующим образом. Может быть выбрано пробное значение коэффициента повышения дискретизации, а соответствующее пробное значение коэффициента понижения дискретизации может быть определено из отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации и выбранного пробного значения коэффициента повышения дискретизации. Коэффициент ошибки повторной синхронизации может быть рассчитан на основе пробных значений коэффициента повышения дискретизации и коэффициента понижения дискретизации, и, если коэффициент ошибки повторной синхронизации больше порогового значения, пробное значение коэффициента повышения дискретизации может быть увеличено, пробное значение коэффициента понижения дискретизации, соответственно, пересчитывается, и затем коэффициент ошибки повторной синхронизации может быть рассчитан повторно. Это увеличение коэффициента повышения дискретизации может повторяться итерационно до тех пор, пока не будут выбраны значения увеличенного коэффициента повышения дискретизации и коэффициента понижения дискретизации, которые дают коэффициент ошибки повторной синхронизации, меньший или равный пороговому значению. Поскольку коэффициенты повышения дискретизации обычно выражаются в форме 2Q, увеличение обычно выполняется путём увеличения только Q, поскольку вычисление 2Q является очень простой операцией для аппаратного или программного обеспечения. Это обеспечивает эффективный способ итерационного задания коэффициентов повышения и понижения дискретизации.
Эталонный коэффициент повышения дискретизации может быть задан, как правило, на этапе проектирования, принимая во внимание ожидаемый диапазон значений первой частоты дискретизации и желательный коэффициент ошибки повторной синхронизации по отношению ко второй частоте дискретизации, учитывая, что эталонный коэффициент повышения дискретизации ограничивается таким образом, что он является целочисленной степенью заданного целочисленного значения, которое обычно равно 2. Затем конкретный набор эталонных коэффициентов фильтрации для функционирования в качестве эталонного коэффициента повышения дискретизации может быть спроектирован и импортирован в систему преобразования частоты дискретизации для хранения в памяти.
Фиг. 8 показывает альтернативный вариант реализации, в котором адаптивному дробному преобразователю частоты дискретизации предшествуют фильтр с конечной импульсной характеристикой (FIR) и прореживание, в этом случае прореживание с помощью настраиваемого коэффициента P, который может быть, например, прореживанием 4:1, за ним следуют ещё один фильтр с конечной импульсной характеристикой (FIR) и прореживание, в этом случае прореживание, которое может быть дополнительным настраиваемым коэффициентом, в этом примере прореживание 2:1. Это может снизить потребность в ресурсах обработки в адаптивном дробном преобразователе частоты дискретизации.
Фиг. 9 является блок-схемой последовательности операций, показывающей способ в соответствии с вариантом осуществления изобретения, содержащим задание коэффициента повышения дискретизации и выбор набора коэффициентов фильтрации на этапах S9.1 - S9.3.
Фиг. 10 является блок-схемой последовательности операций, показывающей способ преобразования частоты дискретизации в варианте осуществления изобретения на этапах S10.1 - S10.4.
Фиг. 11 является дополнительной блок-схемой последовательности операций способа преобразования частоты дискретизации в варианте осуществления изобретения на этапах S11.1 - S11.5.
Варианты осуществления изобретения могут обеспечивать характеристики синхронизации, соответствующие заданной целевой точности, даже когда входные сигналы характеризуются высоким разбросом частоты дискретизации, порядка ± 10% или более.
Варианты осуществления изобретения могут быть полезными в системах сбора данных, характеризующихся большим разбросом номинальных частот дискретизации источника, в частности датчиков МЭМС, на которые обычно влияет высокая изменчивость частоты дискретизации, порядка ± 10 %. Такая высокая изменчивость связана с типом генераторов, используемых датчиками МЭМС, встроенными в микросхему, как правило, индуктивно-ёмкостного (LC) или резистивно-ёмкостного (RC) типа. Эти типы генераторов обычно характеризуются низкой точностью по сравнению с точностью кварцевого генератора и разбросом генерируемой частоты, который обычно зависит от распространения процессов в микросхеме. Кроме того, на изменение частоты дискретизации могут влиять рабочие условия, такие как температура, а также старение и другие факторы. Такие факторы не могут быть легко предсказуемы.
В варианте осуществления изобретения повторно синхронизированный выходной сигнал может быть обеспечен с определенной частотой fo, соответствующей требуемой точности повторной синхронизации, и начиная с входного сигнала, дискретизированного с частотой дискретизации fi, на которую может влиять большое отклонение по отношению к номинальному значению. Это может быть реализовано с помощью алгоритма низкой сложности с использованием ограниченных аппаратных и/или программных ресурсов. Алгоритм может быть масштабируемым для доступной архитектуры и для потенциальных аппаратных и/или программных ресурсов целевой архитектуры, таких как доступное запоминающее устройство и вычислительные ресурсы. Технология также может быть легко реализована посредством программно-аппаратного и/или программного обеспечения для обработки в режиме реального времени, или она может быть выполнена при последующей обработке.
В вариантах осуществления изобретения многофазный фильтр используется для реализации фильтра с конечной импульсной характеристикой (FIR) для интерполяции. Технология многофазной фильтрации может функционировать следующим образом. Из входной частоты fi и выходной частоты fo идентифицируются два взаимно простых целых числа [M, N] таким образом, что fi/fo=N/M, при этом многофазный фильтр содержит группу из M фаз фильтра. Каждая группа применяется в момент времени m с помощью циклического алгоритма таким образом, что применяемая группа к m-му моменту времени выхода является функцией m, N и M. Ширина полосы пропускания фильтра равна 1/max(M, N) (с M-кратной частотой дискретизации).
В общем случае, если на fi влияет высокая изменчивость, fo является зафиксированной величиной и представляет собой желаемую выходную частоту, отношение fi/fo может быть не единственным значением, а набором значений, принадлежащих некоторому интервалу. Вследствие этого, может получиться такая ситуация, что пара [M, N] не определяется однозначно, таким образом может быть не один фильтр, а определённая логическая схема выбора групп. Может потребоваться набор фильтров, по одному для каждой пары [M, N], каждый из которых имеет свою собственную ширину полосы пропускания, и каждый управляется с помощью специализированной логической схемы. Соответственно, потенциально сложность адаптивного многофазного фильтра может возрасти при высокой изменчивости fi. По мере того, как диапазон значений fi увеличивается, диапазон необходимого набора значений [M, N] возрастает, и требуемый объём памяти также может увеличиваться из-за необходимости хранить множество многофазных фильтров, по одному для каждой пары [M, N].
В вариантах осуществления изобретения, даже если fi/fo сильно изменяется, может храниться единственный эталонный многофазный фильтр, соответствующий Mref, и может рассматриваться только уменьшенный набор [M, N], связанный с изменением fi во входном диапазоне, что позволяет держать под контролем сложность алгоритма, поддерживая его в граничных условиях, и при этом соответствовать требуемой точности повторной синхронизации.
Варианты осуществления изобретения могут использовать уменьшенный набор значений M, где M=2n, и n = [1,2,… nmax], где 2nmmax соответствует наилучшей требуемой точности повторной синхронизации.
Варианты осуществления изобретения могут конфигурировать многофазный фильтр, соответствующий некоторой паре [M, N], начиная с эталонного многофазного фильтра, и восстанавливать выборки с обработкой данных в режиме реального времени, полученные с помощью линейной интерполяции или целочисленного прореживания эталонных коэффициентов фильтрации, которые обычно могут включать в себя очень простую обработку.
Процесс преобразования частоты может потребовать вычисления параметров [M, N], коэффициентов повышения и понижения дискретизации. M и N являются целыми взаимно простыми числами, таким образом в идеале N/M = f1/f0. В реальной системе эти две частоты вряд ли будут в рациональном соотношении, поэтому M и N могут быть определены следующим образом. Параметры M и N являются двумя целыми взаимно простыми числами, таким образом отношение N/M выражает отношение частот fi и fo в желаемом приближении.
Таким образом, ошибка повторной синхронизации, связанная с определённым выбором M и N, становится важным параметром производительности, который необходимо учитывать на этапе проектирования устройства. Ошибка es повторной синхронизации может быть задана следующим образом.
es = | (f0 - (M/N)fi) / f0 |
В том случае, когда датчики МЭМС характеризуются высокой изменчивостью частоты дискретизации (например, ± 10 %), [M, N] будет изменяться в зависимости от типа используемого ресурса и условий окружающей среды, таких как рабочая температура и старение.
Варианты осуществления изобретения могут содержать модуль оценки частоты источника и связанные с ним модуль вычисления [M, N], модуль вычисления коэффициента преобразования частоты дискретизации и основной модуль преобразователя частоты дискретизации. Модуль оценки частоты источника и связанный модуль вычисления [M, N] могут вычислять M в форме M = 2n, причём M ≤ Mmax, где Mmax выбирается таким образом, что, посредством изменения [M, N] можно добиться того, что повторная синхронизация осуществляется с ошибкой es ниже фиксированного предела. Модуль вычисления коэффициента преобразования частоты дискретизации может вычислять коэффициенты, после того, как будут вычислены параметры [M, N]. Это вычисление может быть основано на фильтре-прототипе, то есть эталонном фильтре, хранящемся в памяти. Он может обеспечивать текущие коэффициенты просто путём линейной интерполяции или целочисленного прореживания коэффициентов многофазного фильтра. Основной модуль преобразователя частоты дискретизации может быть запрограммирован с использованием коэффициентов и параметров, рассчитанных адаптивным способом, для выполнения фильтрации.
Вышеописанные варианты осуществления следует рассматривать, как иллюстративные примеры изобретения. При этом подразумевается, что любой признак, описанный в отношении любого одного варианта осуществления изобретения, может использоваться отдельно, или в сочетании с другими описанными признаками, а также может использоваться в сочетании с одним или несколькими признаками любых других вариантов осуществления изобретения, или как любое сочетание любых других вариантов осуществления. Кроме того, эквиваленты и модификации, не описанные выше, также могут использоваться без отклонения от объёма охраны изобретения, который определяется в прилагаемой формуле изобретения.
Изобретение относится к средствам преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации, содержащий: измерение первой частоты дискретизации. Технический результат заключается в уменьшении диапазона коэффициентов дискретизации. Задают первый коэффициент повышения дискретизации на основе, содержащей: измеренную первую частоту дискретизации, целевое значение второй частоты дискретизации и коэффициент ошибки повторной синхронизации, при этом первый коэффициент повышения дискретизации ограничивается таким образом, что он задаётся целочисленной степенью заданного целочисленного значения. Выводят из эталонного набора коэффициентов фильтрации и из отношения первого коэффициента повышения дискретизации к эталонному коэффициенту повышения дискретизации первого набора коэффициентов фильтрации для использования в первом интерполяционном фильтре, при этом эталонный набор коэффициентов фильтрации предназначается для эталонного коэффициента повышения дискретизации, который является целочисленной степенью заданного целочисленного значения. 3 н. и 8 з.п. ф-лы, 11 ил.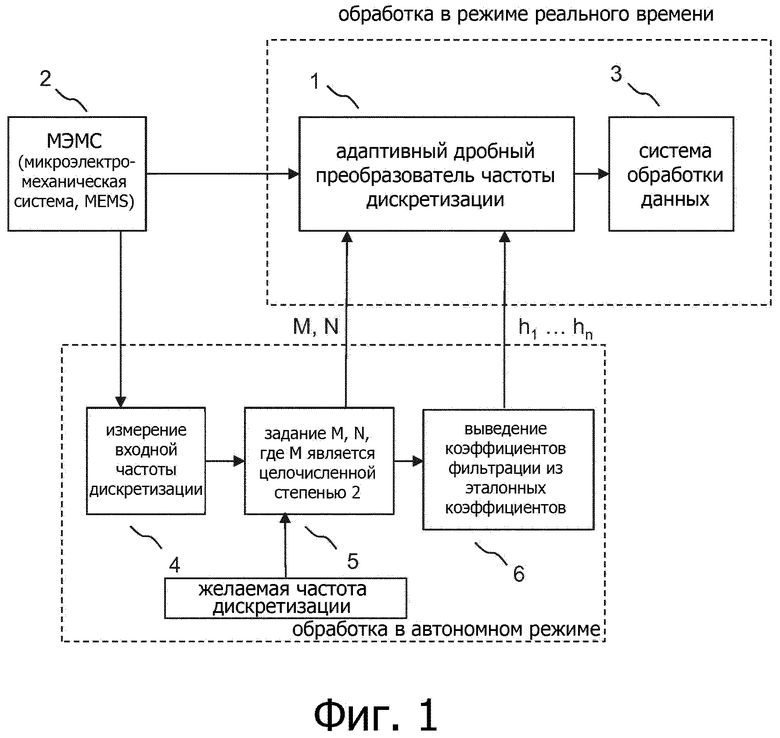
1. Способ преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации, при этом первая частота дискретизации подвергается отклонению от номинального значения, а вторая частота дискретизации находится в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения, при этом способ содержит:
измерение первой частоты дискретизации;
задание первого коэффициента повышения дискретизации на основе, содержащей: измеренную первую частоту дискретизации, целевое значение второй частоты дискретизации и коэффициент ошибки повторной синхронизации, при этом первый коэффициент повышения дискретизации ограничивается таким образом, что он представлен целочисленной степенью заданного целочисленного значения; а также
выведение из эталонного набора коэффициентов фильтрации и из отношения первого коэффициента повышения дискретизации к эталонному коэффициенту повышения дискретизации первого набора коэффициентов фильтрации для использования в первом интерполяционном фильтре, при этом эталонный набор коэффициентов фильтрации предназначается для эталонного коэффициента повышения дискретизации, который является целочисленной степенью заданного целочисленного значения.
2. Способ по п. 1, в котором выведение первого набора коэффициентов фильтрации из эталонного набора коэффициентов фильтрации содержит:
линейную интерполяцию между коэффициентами фильтрации эталонного набора, если первый коэффициент повышения дискретизации больше эталонного коэффициента повышения дискретизации;
установку их равными эталонному набору коэффициентов фильтрации, если первый коэффициент повышения дискретизации равен эталонному коэффициенту повышения дискретизации; и
равномерное прореживание из эталонного набора коэффициентов фильтрации, если первый коэффициент повышения дискретизации меньше эталонного коэффициента повышения дискретизации; при этом коэффициент прореживания равномерного прореживания равен целочисленному отношению эталонного коэффициента повышения дискретизации к первому коэффициенту повышения дискретизации.
3. Способ по п. 1 или 2, в котором заданное целочисленное значение равно 2.
4. Способ по любому из предыдущих пп., в котором первый интерполяционный фильтр и эталонный интерполяционный фильтр являются многофазными фильтрами.
5. Способ по любому из предыдущих пп., содержащий:
задание первого коэффициента понижения дискретизации на основе, содержащей: измеренную первую частоту дискретизации, целевое значение второй частоты дискретизации и заданный коэффициент ошибки повторной синхронизации, при этом первый коэффициент понижения дискретизации является целым числом; и
преобразование потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации с помощью процессов, включающих в себя повышающую дискретизацию с помощью первого коэффициента повышения дискретизации, фильтрацию с использованием первого набора коэффициентов фильтрации для первого интерполяционного фильтра и понижающую дискретизацию с помощью первого коэффициента понижения дискретизации.
6. Способ по п. 5, в котором задание первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации содержит:
задание отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации; и
выбор значения первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации таким образом, чтобы коэффициент ошибки между отношением целевого значения второй частоты дискретизации к первой частоте дискретизации и отношением первого коэффициента повышения дискретизации к первому коэффициенту понижения дискретизации был меньше, чем заданный коэффициент ошибки повторной синхронизации.
7. Способ по п. 6, содержащий:
выбор пробного значения первого коэффициента повышения дискретизации;
задание пробного значения первого коэффициента понижения дискретизации на основе заданного отношения целевого значения второй частоты дискретизации к измеренной первой частоте дискретизации и на основе выбранного пробного значения первого коэффициента повышения дискретизации;
вычисление коэффициента ошибки повторной синхронизации на основе пробных значений первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации;
если коэффициент ошибки повторной синхронизации больше порогового значения, итерационное увеличение пробного значения первого коэффициента повышения дискретизации и пробного значения первого коэффициента понижения дискретизации, и вычисление коэффициента ошибки повторной синхронизации; и
выбор соответствующего значения увеличенного первого коэффициента повышения дискретизации и первого коэффициента понижения дискретизации, которое даёт коэффициент ошибки повторной синхронизации, меньший или равный пороговому значению.
8. Способ по любому из предыдущих пунктов, в котором отклонение от номинального значения первой частоты дискретизации превышает ± 1%.
9. Способ по п. 8, в котором отклонение от номинального значения первой частоты дискретизации превышает ± 10%.
10. Устройство для преобразования потока выборок с первой частотой дискретизации в поток выборок со второй частотой дискретизации, при этом первая частота дискретизации подвергается отклонению от номинального значения, а вторая частота дискретизации находится в пределах заданного коэффициента ошибки повторной синхронизации от целевого значения, при этом устройство выполняется с возможностью реализовывать способ по любому из пп. 1-9.
11. Система датчиков для транспортного средства, содержащая:
датчик МЭМС (микроэлектромеханическая система, MEMS), выполненный с возможностью генерировать поток выборок с первой частотой дискретизации;
систему обработки данных, выполненную с возможностью принимать поток выборок со второй частотой дискретизации; и
устройство по п. 10.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6208671 B1, 27.03.2001 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

