Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах (ОП) систем радиомониторинга для определения азимута и угла места на источник радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС).
Для увеличения дальности и расширения рабочей зоны радиомониторинга наземных ИРИ обнаружитель-пеленгатор размещают на борту ЛПС в качестве целевой нагрузки. В этом случае возможно использование объемных антенных решеток (АР), которые обеспечивают близкие по азимуту и по углу места показатели точности и достоверности пеленгования. При этом ОП должен обеспечивать выполнение требований не только по основному техническому назначению (в том числе по точности и достоверности пеленгования ИРИ), но и в части ограничений по массе и габаритным характеристикам, которые оказывают влияние на летно-технические характеристики ЛПС.
В частности, в качестве одного из вариантов объемной АР, структура которой обеспечивает минимизацию количества используемых радиоприемных каналов ОП и приемных антенных элементов, может быть использована винтовая антенная решетка, рассмотренная в [Артемов М.Л., Афанасьев О.В., Сличенко М.П., Артемова Е.С. Способ двухмерного моноимпульсного пеленгования источников радиоизлучений. Патент РФ № 2696095, G01S 5/04].
Однако, в практике радиомониторинга возможны ситуации, когда отношение высоты полёта ЛПС к дальности до ИРИ составляет много меньше единицы (радиомониторинг ИРИ на дальностях до ЛПС близких к радиогоризонту). В таких случаях информативным признаком пространственного положения наземного ИРИ является лишь азимут, а реализация АР объемной структуры представляется нецелесообразной, поэтому в указанных ситуациях широкое распространение на практике получили плоские АР. За счет плоской структуры обеспечивается возможность удовлетворения требованиям в части летных технических характеристик ЛПС.
Для плоских АР точность и достоверность пеленгования существенно ухудшаются при стремлении к нулю угла направления прихода радиоволны в вертикальной плоскости (перпендикулярной плоскости расположения антенных элементов АР), что обусловлено уменьшением апертуры АР в проекции на плоскость волнового фронта радиоволны.
Важным является учет изменения углов пространственной ориентации ЛПС в процессе его движения. Плоскость расположения элементов АР меняет ориентацию в пространстве в соответствии с параметрами движения ЛПС, а характеристики точности и достоверности пеленгования ИРИ зависят от текущих углов ориентации ЛПС. Следовательно, для пеленгования ИРИ с ЛПС необходимо обеспечить прием радиоволны в общем случае с ненулевым углом относительно плоскости АР, зависящим как от взаимного расположения ИРИ и АР, так и от углов пространственной ориентации носителя.
Результаты оценивания направления на ИРИ используются для определения координат ИРИ триангуляционным способом. Так как координаты ИРИ определены в неподвижной системе координат (СК), связанной с землей (для большинства задач – в топографической проекции Гаусса-Крюгера), то и оценки углов направления на ИРИ необходимо определять в этой СК. Полученная в связанной с ЛПС СК оценка вектора направления на ИРИ с использованием информации о текущих углах ориентации ЛПС преобразуется в неподвижную СК, связанную с землей. В случае пеленгования в азимутально-угломестной плоскости преобразование направления на ИРИ в связанную с землей СК предполагает использование стандартной процедуры вращения трехмерного единичного вектора по трем углам Эйлера-Колмогорова [ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. М., 1981. № 3913, 52 с. (Издательство стандартов)]: крен, тангаж и рысканье (курс). Использование указанных трех углов ориентации ЛПС позволяет однозначным образом преобразовать результаты азимутально-угломестного пеленгования между различными СК.
В случае игнорирования информации об ориентации ЛПС возникают дополнительные ошибки пеленгования, с увеличением отношения апертуры АР к длине радиоволны повышается вероятность аномальной ошибки пеленгования, что приводит не только к снижению точности и достоверности пеленгования, но и к уменьшению рабочего диапазона частот ОП (коэффициента перекрытия АР по частоте).
Известны способы определения координат ИРИ, учитывающие ориентации ЛПС в пространстве.
Известен способ определения значений азимута и угла места ИРИ с борта ЛПС, обеспечивающего повышение точности нахождения расположения ИРИ путем более полного учета пространственной ориентации антенной решетки измерителя, представленный в [Наумов А.С., Елизаров В.В. Определение координат источника радиоизлучения при пеленговании с ЛПС. – Успехи современной радиоэлектроники, 2015, №7, с.56-61] заключающийся в:
1. Измерении ориентации антенной системы пеленгатора относительно корпуса ЛПС (крен, тангаж, курс). Значения 
2. Поиске и приеме сигналов ИРИ в заданной полосе частот 
3. Измерении пространственных координат ИРИ: азимута 

4. Определении местоположения ЛПС с помощью ГНСС 



5. Преобразовании координат ЛПС в геоцентрическую систему координат:
6. Переводе вектора направления на источник 
7. Последовательном перемножении исходного вектора 

где
8. Преобразовании скорректированного вектора направления на ИРИ 
9. Последовательном перемножении вектора 

10. Определении значения азимута 
Известен способ местоопределения наземных ИРИ с борта ЛПС, представленный в [Березин А.В., Богданов Ю.Н., Вассенков А.В., Виноградов А.Д., Дмитриев И.С., Попов С.А. Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата. Патент РФ №2610150, G01S 1/08] и заключающийся в:
1. Приеме радиосигналов бортовой пеленгаторной антенной (БПА);
2. Частотной селекции радиосигналов;
3. Определении линий радиопеленгов в азимутальной плоскости БПА;
4. Регистрации полученных данных периодически отсчетами;
5. Формировании не менее одной независимой пары пересекающихся полуплоскостей положения наземного ИРИ, ортогональных азимутальной плоскости БПА, проходящих через каждую полученную линию радиопеленгатора;
6. Выборе и весовой обработке пар независимых отсчетов данных, учитывающих зависимости дисперсий оценок координат наземного ИРИ от взаимного расположения в пространстве ЛПС и наземного ИРИ. При выборе и весовой обработке пар независимых отсчетов данных дополнительно учтены зависимости дисперсий оценок координат наземного ИРИ от параметров угловой ориентации БПА и от углов пересечения линии положения и нормалей к полуплоскостям положения наземного ИРИ с поверхностью Земли;
7. Формировании нормалей к полуплоскостям положения наземного ИРИ;
8. Определении не менее одной линии положения наземного ИРИ как линии пересечения независимой пары пересекающихся полуплоскостей положения наземного ИРИ, параметры которой определяют из условия ортогональности к вышеупомянутым нормалям;
9. Определении координат наземного ИРИ как точки пересечения линии положения неземного ИРИ с поверхностью Земли с использованием итерационной процедуры ее поиска.
Так же известен способ определения координат ИРИ [Житник М.А., Строцев А.А., Сухенький И.А., Способ определения координат источника радиоизлучения с борта летательного аппарата по двум азимутальным пеленгам. Патент РФ №2638177, G01S 1/08], заключающийся в
1. Приеме радиосигналов бортовой пеленгационной антенной;
2. Частотной селекции;
3. Определении линии пеленгов в плоскости пеленгаторной антенны;
4. Весовой обработке полученных данных;
5. Формировании по результатам весовой обработки вспомогательных плоскостей, ортогональные плоскости пеленгаторной плоскости пеленгаторной антенны и проходящие через каждую полученную линию пеленга. В моменты получения пеленгов координаты ЛПС переводят в геоцентрическую прямоугольную систему координат, затем составляют матрицу перехода из связанной системы координат в нормальную подвижную систему координат и далее в геоцентрическую прямоугольную систему координат путем перемножения матриц поворота на углы крена, тангажа и рысканья связанной системы координат;
6. Нахождении прямой линии пересечения двух вспомогательных плоскостей;
7. Вычислении координат ИРИ как точки пересечения найденной прямой линии и поверхности Земли, описанной эллипсоидом.
Основным недостатком перечисленных способов является использование при определении координат ИРИ информации об угломестных пеленгах, которые измеряются с низкими (по сравнению с азимутами) показателями точности и достоверности ввиду недостаточной разрешающей способности АР при малых истинных угломестных пеленгах на наземный ИРИ. При этом информация об ориентации ЛПС в пространстве используется для преобразования результатов пеленгования, а не принимаемых в процессе пеленгования радиосигналов, что в случае азимутального пеленгования наземных ИРИ приводит к снижению точности и достоверности пеленгования.
Известен способ амплитудного двумерного пеленгования [Уфаев В.А., Волобуев М.Ф., Михайленко С.Б., Волков А.А. Способ амплитудного двухмерного пеленгования. Патент РФ № 260130, G01S 5/04], предполагающий преобразование принятых амплитуд сигналов в угловой спектр и определении направления на излучатель по его максимуму. Аналог может быть использован в наземных и авиационных радиотехнических системах для всеракурсного определения направления на источники излучений.
Данный способ предполагает выполнение следующих процедур:
1. Прием излучаемого сигнала с помощью идентичных разнонаправленных антенн.
2. Измерение амплитуды принятых сигналов. Значение радиосигнала n-й антенны (
 ,
,

3. Преобразование измерений в угловой спектр
4. Определение направления на излучатель путем максимизации углового спектра:

Основными недостатками способа являются следующие:
1. При формировании решающей статистики не учитывается пространственная ориентация ЛПС: крен, тангаж, рысканье (курс).
2. Низкая точность пеленгования наземного ИРИ по углу места, когда отношение высоты полёта ЛПС к дальности до ИРИ составляет много меньше единицы (радиомониторинг ИРИ на дальностях до ЛПС близких к радиогоризонту), что является ограничением применимости данного способа на практике.
3. Решающая статистика 
4. Выражение (2) для решающей статистики обнаружения не учитывает наличие межканальной корреляции спектральных отсчетов временных реализаций, обусловленных наличием в реальных условиях приема радиосигналов внешних помех.
Наиболее близким по технической сущности к предлагаемому является способ азимутального пеленгования наземных источников радиоизлучения, представленный в [Артемова Е.С., Сличенко М.П. Азимутальное пеленгование наземных источников радиоизлучения при размещении плоской антенной решетки произвольной конфигурации на летательном аппарате. – Антенны, 2019, №3, с.53-61], принятый за прототип.
Способ-прототип включает выполнение следующих процедур.
1. Многократный, последовательный во времени синхронный прием сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн АР в пространственных каналах ОП, синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора.
2. По каждому спектральному отчету вычисление канальных и взаимных (межканальных) энергий быстрого преобразования Фурье и накопление энергий путем суммирования их значений, вычисленных по каждому принятому сигналу, и формирование матрицы  взаимных энергий, равной произведению
взаимных энергий, равной произведению  накопленной матрицы
накопленной матрицы  взаимных энергий и матрицы
взаимных энергий и матрицы  , обратной к матрице корреляции
, обратной к матрице корреляции  аддитивного шума.
аддитивного шума.
 – матрица взаимных энергий сигналов, «накопленная» по серии из K>1 измерений, с элементами
– матрица взаимных энергий сигналов, «накопленная» по серии из K>1 измерений, с элементами

Значение комплексной амплитуды спектральной компоненты преобразования Фурье принимаемого радиосигнала на выходе n-й антенны, 

где  – комплексная амплитуда радиосигнала;
– комплексная амплитуда радиосигнала;

 – вектор аддитивного шума.
– вектор аддитивного шума.
 – комплексный отсчет (с порядковым номером nb =0…Nb-1) быстрого преобразования Фурье k-ого сигнала принятого в
– комплексный отсчет (с порядковым номером nb =0…Nb-1) быстрого преобразования Фурье k-ого сигнала принятого в 

k=1…К – порядковый номер принятого сигнала во временной области;
 – матрица корреляции аддитивного шума (при отсутствии корреляции шума матрица является диагональной);
– матрица корреляции аддитивного шума (при отсутствии корреляции шума матрица является диагональной);



3. Формирование единичного вектора 

где 
Вектор 
4. Формирование одномерной векторной комплексной диаграммы направленности (ВКДН) АР с произвольными структурой и характеристиками направленности антенных элементов  для каждого обнаруженного сигнала на частоте
для каждого обнаруженного сигнала на частоте 
В частном случае плоской кольцевой эквидистантной антенной решетки


n, N – порядковый номер и количество АЭ,
f – частота ЭМ волны, МГц;

5. Измерение значений пеленгационного рельефа (ПР) для каждого i-го обнаруженного сигнала на частоте 

 – ВКДН АР ОП в земной СК, зависящая от истинного азимута на ИРИ и трех углов ориентации ЛПС.
– ВКДН АР ОП в земной СК, зависящая от истинного азимута на ИРИ и трех углов ориентации ЛПС.
6. Вычисление максимального значения ПР 
7. Оценка направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте
Основными недостатками способа-прототипа являются следующие.
1. Реальные условия функционирования ОП характеризует насыщенная высокодинамичная электромагнитная обстановка, обусловленная в том числе загруженностью и насыщенностью радиочастотного спектра, образованного излучениями множества радиоэлектронных средств. При функционировании ОП в таких условиях на практике возможны случаи, когда принимаемый сигнал образован как прямой радиоволной от ИРИ, так и отраженной радиоволной от расположенных в области приема переизлучающих элементов. В частности, при размещении АР ОП на поверхности фюзеляжа воздушного носителя либо в качестве присоединяемой целевой нагрузки переизлучающими объектами могут являться как элементы конструкции носителя (например, стойки шасси), так и расположенное на внешней поверхности носителя штатное бортовое радиоэлектронное оборудование. Кроме того, насыщенность и загруженность радиочастного спектра может привести к случаям приема радиосигналов с взаимно перекрывающимися спектрами от нескольких ИРИ. Предлагаемое в способе-прототипе односигнальное пеленгование нескольких частотно-неразделимых радиосигналов в большинстве случаев приведет к аномальным ошибкам пеленгования. Поэтому обозначенные условия приема обуславливают необходимость выполнения процедур обнаружения спектральных компонент сигналов, их отождествления по принадлежности к одному и тому же ИРИ, а также оценки «достоверности» пеленгования ИРИ в условиях насыщенной электромагнитной обстановки. Выполнение данных процедур в прототипе не предусмотрено, что является недостатком, так как приводит к снижению показателей эффективности функционирования систем радиомониторинга при определении азимута и угла места на ИРИ с ЛПС в условиях реальной насыщенной электромагнитной обстановки.
2. В процессе полета носитель по различным причинам выполняет воздушные маневры, включая разворот, в процессе выполнения которых результаты пеленгования могут являться недостоверными ввиду значительных изменений углов ориентации летательного аппарата, приводящих к приему радиосигналов за пределами рабочего сектора углов. Однако в прототипе не предусмотрена оценка «достоверности» пеленгования ИРИ, что является недостатком. Реализация данной оценки обеспечит необходимую селекцию результатов пеленгования по показателю достоверности с повышением точности и достоверности пеленгования ИРИ с ЛПС в реальных условиях.
3. В прототипе учитывается наличие межканальной корреляции принимаемых спектральных компонент радиосигналов, обусловленной наличием в реальных условиях внешних помех, при этом матрица ковариации  предполагается известной. Однако в большинстве практических ситуаций матрицу можно считать известной лишь с точностью до некоторого скалярного множителя, характеризующего априорно неизвестную интенсивность помех в различных пространственных каналах приема. Используемое в способе-прототипе предположение об известной матрице ковариации является недостатком, существенным образом ограничивающим область применимости и показатели работоспособности в реальных условиях.
предполагается известной. Однако в большинстве практических ситуаций матрицу можно считать известной лишь с точностью до некоторого скалярного множителя, характеризующего априорно неизвестную интенсивность помех в различных пространственных каналах приема. Используемое в способе-прототипе предположение об известной матрице ковариации является недостатком, существенным образом ограничивающим область применимости и показатели работоспособности в реальных условиях.
Указанные недостатки способа-прототипа обуславливают снижение показателей эффективности его функционирования при реализации в системах радиомониторинга для определения азимута и угла места на наземные ИРИ с ЛПС в реальных условиях насыщенной высокодинамичной электромагнитной обстановки.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение эффективности азимутального пеленгования наземных ИРИ с борта ЛПС многоканальных моноимпульсных обнаружителей-пеленгаторов.
Для решения поставленной задачи в способе обнаружения и азимутального пеленгования наземных источников радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС), включающем многократный последовательный во времени синхронный прием сигналов во временной области, одновременно попадающих в текущую полосу приема и анализа с выходов всех антенн антенной решетки (АР) в пространственных каналах обнаружителя-пеленгатора (ОП), синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора, по каждому спектральному отчету вычисление канальных и взаимных – межканальных энергий быстрого преобразования Фурье и накопление энергий путем суммирования их значений, вычисленных по каждому принятому сигналу, и формирование матрицы  взаимных энергий, равной произведению
взаимных энергий, равной произведению  накопленной матрицы
накопленной матрицы  взаимных энергий сигналов по серии из K>1 измерений и матрицы
взаимных энергий сигналов по серии из K>1 измерений и матрицы  , обратной к матрице корреляции аддитивного шума, формирование единичного вектора
, обратной к матрице корреляции аддитивного шума, формирование единичного вектора  ) для каждого обнаруженного сигнала на частоте
) для каждого обнаруженного сигнала на частоте 

где  – матрица коэффициентов межканальной корреляции аддитивного шума;
– матрица коэффициентов межканальной корреляции аддитивного шума;
оценивают «достоверность» пеленгования ИРИ по результатам вычисления и сравнения решающей статистики  с порогом h, выбираемым согласно критерию Неймана-Пирсона,
с порогом h, выбираемым согласно критерию Неймана-Пирсона, 

 .
.
Более универсальным и сообразным физической сущности процесса пеленгования наземного ИРИ с произвольно ориентированного в пространстве ЛПС представляется использование следующих исходных предпосылок:
– задача пеленгования формулируется и решается в одной и той же неподвижной земной СК, в которой определено понятие пеленга на ИРИ и математически корректно его использование для решения задачи определения координат ИРИ триангуляционным способом;
– изменение ориентации ЛПС в пространстве обуславливает соответствующее изменение ориентации АР в земной СК, а вместе с ним – изменение «отклика» АР, характеризуемого ВКДН АР.
Действительно, истинные значения напряжений на выходах АР от принимаемой радиоволны ИРИ, имеющего фиксированный азимут, зависят от углов ориентации АР, что необходимо учитывать посредством преобразования ВКДН АСР (а не результатов пеленгования) в неподвижную СК.
Предлагаемый способ обнаружения и азимутального пеленгования наземных ИРИ с летно-подъемного средства включает выполнение следующих процедур.
1. Многократный последовательный во времени синхронный прием сигналов во временной области (одновременно попадающих в текущую полосу приема и анализа) с выходов всех антенн АР в пространственных каналах ОП, синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора.
2. По каждому спектральному отсчету вычисление канальных и взаимных (межканальных) энергий быстрого преобразования Фурье и накопление энергий путем суммирования их значений, вычисленных по каждому принятому сигналу, и формирование нормированной матрицы  взаимных энергий, равной произведению
взаимных энергий, равной произведению  накопленной матрицы
накопленной матрицы  взаимных энергий и матрицы
взаимных энергий и матрицы  , обратной к матрице коэффициентов корреляции
, обратной к матрице коэффициентов корреляции  аддитивного шума.
аддитивного шума.
 – матрица взаимных энергий сигналов, «накопленная» по серии из K>1 измерений, с элементами
– матрица взаимных энергий сигналов, «накопленная» по серии из K>1 измерений, с элементами

Значение комплексной амплитуды спектральной компоненты преобразования Фурье принимаемого радиосигнала на выходе n-й антенны,
где  – комплексная амплитуда радиосигнала;
– комплексная амплитуда радиосигнала;
 – вектор аддитивного шума;
– вектор аддитивного шума;
 – комплексный отсчет (с порядковым номером nb =0…Nb-1) быстрого преобразования Фурье k-ого сигнала принятого в
– комплексный отсчет (с порядковым номером nb =0…Nb-1) быстрого преобразования Фурье k-ого сигнала принятого в
k=1…К – порядковый номер принятого сигнала во временной области;
 – матрица коэффициентов межканальной корреляции аддитивного шума (при отсутствии корреляции шума матрица является диагональной единичной);
– матрица коэффициентов межканальной корреляции аддитивного шума (при отсутствии корреляции шума матрица является диагональной единичной);
3. Адаптивное обнаружение спектральных компонент сигналов ИРИ, заключающееся в формировании нормированной матрицы взаимных энергий, по результатам которого одновременно вычисляются суммы диагональных элементов квадрата нормированной матрицы и квадрат суммы диагональных элементов нормированной матрицы, результаты вычислений которых подставляются в формулу решающей статистики и далее сравнивают решающую статистику с порогом, выбираемому по критерию Неймана-Пирсона. [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л. Сличенко М.П. Способ адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов источников радиоизлучения. Патент РФ № 2696022 G01S 5/04].
4. Адаптивное отождествление спектральных компонент по принадлежности к сигналу одного ИРИ, заключающееся в формировании нормированной матрицы взаимных энергий, по результатам которого одновременно вычисляются суммы диагональных элементов и произведения сумм диагональных элементов, результаты вычисления которых подставляются в решающую статистику, которая сравнивается с порогом, выбираемым по критерию Неймана-Пирсона [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л.. Коненков Е.А., Сличенко М.П. Способ адаптивного отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения. Патент РФ № 2696093 G01S 5/04].
5. Формирование единичного вектора

где
Вектор
6. Формирование одномерной ВКДН АР с произвольными структурой и характеристиками направленности антенных элементов
( ) для каждого обнаруженного сигнала на частоте
) для каждого обнаруженного сигнала на частоте
В частном случае плоской кольцевой эквидистантной антенной решетки


n, N – порядковый номер и количество АЭ,
f – частота ЭМ волны, МГц;
7. Измерение значений адаптивного к неизвестной интенсивности шума пеленгационного рельефа (ПР) для каждого i-го обнаруженного сигнала на частоте

 – ВКДН АР ОП в земной СК, зависящая от истинного азимута на ИРИ и трех углов ориентации ЛПС.
– ВКДН АР ОП в земной СК, зависящая от истинного азимута на ИРИ и трех углов ориентации ЛПС.
8. Вычисление максимального значения адаптивного к неизвестной интенсивности шума ПР
9. Оценка направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте

10. Оценку достоверности результатов пеленгования, включающую проверку выполнение неравенства
где h – порог, выбираемый согласно критерию Неймана-Пирсона, 
Предлагаемый способ азимутального обнаружения и пеленгования наземных ИРИ с летно-подъемного средства лишен перечисленных выше недостатков существующих аналогов, а именно:
1. ПР (4) учитывает пространственную ориентацию ЛПС: крен, тангаж, рысканье (курс). Изменение ориентации ЛПС в пространстве обуславливает соответствующее изменение ориентации АР в земной СК, а вместе с ним – изменение «отклика» АР, характеризуемого ВКДН АР.
2. Решающее правило предлагаемого способа справедливо в случае АР с произвольной структурой и характеристиками направленности антенных элементов. Это позволяет использовать предлагаемый способ в реальных условиях функционирования обнаружителей-пеленгаторов, когда имеют место взаимные влияния антенн друг на друга.
3. Выражение (4) для ПР учитывает наличие межканальной корреляции, обусловленных наличием в реальных условиях внешних помех, что позволяет при разработке обнаружителей-пеленгаторов проводить анализ достижимых показателей эффективности пеленгования сигналов ИРИ в условиях насыщенной электромагнитной обстановки,
4. Предлагаемый способ лишен ошибок пеленгования связанных с низкой точностью определения угла места на наземный ИРИ на дальностях до ЛПС близких к радиогоризонту.
Предлагаемый способ азимутального обнаружения и пеленгования наземных ИРИ с летно-подъемного средства лишен перечисленных выше недостатков прототипа, а именно:
1. Предлагаемый способ предполагает выполнение процедур обнаружения спектральных компонент сигналов, их отождествления по принадлежности к одному и тому же ИРИ, а также оценки «достоверности» пеленгования ИРИ в условиях насыщенной электромагнитной обстановки. Выполнение данных процедур позволяет повысить показатели эффективности функционирования систем радиомониторинга при определении азимута и угла места на ИРИ с ЛПС в условиях реальной насыщенной электромагнитной обстановки, характеризуемой насыщенностью и загруженностью радиочастотного спектра.
2. Выполняемая в предлагаемом способе оценка «достоверности» пеленгования ИРИ обеспечивает необходимую селекцию результатов пеленгования (в том числе, в процессе выполнения носителем воздушных маневров, включая разворот, со значительными изменениями углов ориентации летательного аппарата, приводящими к приему радиосигналов за пределами рабочего сектора углов) по показателю достоверности с повышением точности и достоверности пеленгования ИРИ с ЛПС в реальных условиях.
3. Заявляемый способ позволяет учитывать не только наличие межканальной корреляции принимаемых спектральных компонент радиосигналов, обусловленной наличием в реальных условиях внешних помех, но и в отличие от прототипа, является работоспособным в условиях априорно неизвестной интенсивности помех в различных пространственных каналах приема. Показатели эффективности предлагаемого способа, включая характеристики обнаружения, отождествления спектральных компонент сигналов по принадлежности к одному ИРИ и оценивания достоверности результатов пеленгования адаптивны к величине интенсивности помех.
Предлагаемый способ обнаружения и азимутального пеленгования наземных ИРИ с летно-подъемного средства обеспечивает повышение эффективности пеленгования за счет того, что способ основан на использовании навигационной информации об углах пространственной ориентации АР и преобразовании не результатов пеленгования, а характеристик направленности АР (ВКДН) из связанной подвижной СК в неподвижную СК, связанную с Землей. Это позволяет повысить точность и достоверность азимутального пеленгования наземного ИРИ, и последующего определения координат ИРИ триангуляционным способом. Формула (4) ПР учитывает ориентацию ЛПС в пространстве и межканальную корреляцию радиосигналов, обусловленную наличием в реальных условиях внешних помех, справедлива в случае АР с произвольной структурой и характеристиками направленности антенных элементов.
В частном случае, при нулевых углах крена, тангажа и рысканья (φ – угол крена, θ – угол тангажа, ψ – угол рысканья), формула ПР 
Оценка 
 .
.
Таким образом, предлагаемый способ обнаружения и азимутального пеленгования наземных ИРИ с летно-подъемного средства в частном случае применим при размещении ОП на поверхности Земли, что расширяет область применимости предлагаемого способа.
Схема устройства для реализации предлагаемого способа представлена на фиг. 1, где обозначено:
1 – блок многократного многоканального приема временных реализаций и переноса на более низкую частоту;
2 – блок оцифровки временных реализаций;
3 – блок вычисления преобразования Фурье временных реализаций;
4 – блок вычисления канальных спектров;
5 – блок вычисления взаимных спектров;
6 – блок накопления матриц взаимных энергий;
7 – блок обнаружения спектральных компонент сигналов ИРИ;
8 – блок отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения;
9 – блок запоминания текущих навигационных параметров ЛПС (крен, тангаж, рысканье);
10 – блок формирования значений единичного вектора
11 – блок формирования ВКДН АР в земной СК;
12 – блок формирования значений ПР;
13 – блок определения максимума ПР;
14 – блок оценки достоверности направления на ИРИ.
Устройство (обнаружитель-пеленгатор) содержит последовательно соединенные блок многократного многоканального приема временных реализаций и переноса на более низкую частоту 1, блок оцифровки временных реализаций 2 и блок вычисления преобразования Фурье временных реализаций 3, выходы которого соединены соответственно с входами блока вычисления канальных спектров 4 и блока вычисления взаимных спектров 5. При этом выходы блоков вычисления канальных спектров 4 и вычисления взаимных спектров 5 соединены с соответствующими входами блока накопления матриц взаимных энергий 6, выход которого через последовательно соединенные блок 7 обнаружения спектральных компонент сигналов ИРИ, блок 8 отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения, блок запоминания текущих навигационных параметров ЛПС в пространстве 9, блок формирования значений единичного вектора
Устройство для реализации заявляемого способа работает следующим образом.
Блок 1 осуществляет многократный, последовательный во времени синхронный (когерентный) прием временных реализаций с выходов всех антенн АС в пространственных каналах обнаружителя-пеленгатора и когерентный перенос на более низкую частоту. Затем блок 2 синхронно преобразует принятые временные реализации в цифровую форму. В блоке 3 для каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора происходит вычисление отсчетов преобразования Фурье  . По каждому из анализируемой пары спектральных отчетов преобразования Фурье с помощью блока 4 выполняется вычисление действительных канальных
. По каждому из анализируемой пары спектральных отчетов преобразования Фурье с помощью блока 4 выполняется вычисление действительных канальных  и параллельно с этим в блоке 5 вычисление комплексных взаимных энергий
и параллельно с этим в блоке 5 вычисление комплексных взаимных энергий  .
.
По результатам вычисления блоков 4 и 5 в блоке 6 происходит накопление для каждой пары спектральных отчетов по каждой из принятых временных реализаций канальных и взаимных энергий спектральных компонент путем суммирования их значений, вычисленных по каждой из принятых временных реализаций 
В блоке адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов 7 формируется нормированная матрица взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов квадрата нормированной матрицы и квадрат суммы диагональных элементов нормированной матрицы, результаты вычислений подставляются в формулу решающей статистики [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л.. Сличенко М.П. Способ адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов источников радиоизлучения. Патент РФ № 2696022 G01S 5/04] и далее сравнивают решающую статистику с порогом, выбираемым по критерию Неймана-Пирсона. В случае превышения порога в блоке 8 спектральные компоненты отождествляются по принадлежности к сигналу одного источника радиоизлучения путем формирования нормированной матрицы взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов и произведения сумм диагональных элементов, результаты которых подставляются в решающую статистику, которая сравнивается с порогом, выбираемым по критерию Неймана-Пирсона [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л.. Коненков Е.А., Сличенко М.П. Способ адаптивного отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения. Патент РФ № 2696093 G01S 5/04]. В блоке 9 запоминаются текущие навигационные параметры ЛПС (крен, тангаж, рысканье). Далее в блоке 10 формируются значения единичного вектора  ) для каждого обнаруженного сигнала на частоте
) для каждого обнаруженного сигнала на частоте 
Получены результаты статистического моделирования способа обнаружения и азимутального пеленгования наземных ИРИ с летно-подъемного средства. На фиг. 2 – 4 представлены результаты статистического моделирования для семиэлементной (N=7) эквидистантной кольцевой антенной решетки при отношении радиуса ЭКАР к длине волны 
На фиг. 2 представлена азимутальная зависимость функции неопределенности (ФН) – пеленгационного рельефа при бесконечно большом отношении сигнал/шум – в случае ОП с семиэлементной ЭКАР при отношении радиуса решетки к длине волны 



На фиг. 3а – 4а представлены зависимости ФН от азимута и угла места при нулевых углах ориентации ЛПС, отношении радиуса решетки к длине волны 
Из приведенных рисунков видно, что с увеличением отношения радиуса решетки к длине волны 
На фигурах 5 и 6 приведена зависимость максимального уровня бокового лепестка (МУБЛ) ФН от отношения радиуса семиэлементной решетки к длине волны 
Видно, что отсутствие преобразования ВКДН АР из связанной СК в неподвижную СК, связанную с Землей, в способах азимутального пеленгования приводит к уменьшению верхней частоты рабочего диапазона частот. Так, при ориентация АР в пространстве, обеспечивающих угол прихода радиоволны 20 градусов в вертикальной плоскости относительно плоскости АР, МУБЛ при 
Таким образом, использование навигационной информации об углах пространственной ориентации АР позволяет осуществлять поиск азимута на ИРИ в криволинейном срезе двумерного азимутально-угломестного пеленгационного рельефа, соответствующем эволюции ориентации вектора направления прихода радиоволны в азимутальном круге при произвольной ориентации ЛПС. Предлагаемый способ пеленгования, основанный на преобразовании ВКДН АР из связанной СК в земную с учетом углов ориентации ЛПС, позволяет повысить точность и достоверность азимутального пеленгования наземного ИРИ, и последующего определения координат ИРИ триангуляционным способом.
Достигаемый технический результат – повышение эффективности азимутального пеленгования наземных ИРИ многоканальным пеленгатором.
Технический результат достигается за счет использования навигационной информации об углах пространственной ориентации АР и преобразовании не результатов пеленгования, а характеристик направленности АР из связанной подвижной СК в неподвижную СК, связанную с Землей. Это позволяет осуществлять пеленгование и поиск азимута на ИРИ в криволинейном срезе двумерного азимутально-угломестного пеленгационного рельефа, соответствующем эволюции ориентации вектора направления прихода радиоволны в азимутальном круге при произвольной ориентации АР, размещенной на ЛПС. Благодаря такому учету информации об ориентации ЛПС обеспечивается повышение точности и достоверности пеленгования наземных ИРИ, и последующего определения координат наземных ИРИ триангуляционным способом.
По результатам пространственно-многоканального обнаружения спектральных компонент радиосигналов ИРИ, отождествления компонент по принадлежности к сигналам одного и того же ИРИ выполняется оценка направления на ИРИ путем глобальной максимизации решающей функции – пеленгационного рельефа, зависящего от ВКДН АР ОП, накопленной в серии измерений матрицы взаимных энергий спектральных компонент сигнала ИРИ и матрицы ковариации аддитивного шума.
ВКДН АР характеризует структуру и характеристики направленности антенных элементов АР в азимутально-угломестной плоскости и определяется в СК, связанной с АР. Ввиду этого, положение глобального максимума пеленгационного рельефа соответствует оценкам углов ориентации единичного вектора направления прихода радиоволны в СК, связанной с АР, и в случае плоской АР – углов ориентации относительно плоскости расположения антенных элементов.
Задачу азимутального пеленгования наземного ИРИ с ЛПС сформулируем следующим образом: по совокупности наблюдаемых данных – комплексных амплитуд напряжений на выходах АР ОП, а также измерений углов ориентации ЛПС в пространстве, необходимо разработать правило принятия решения о справедливой статистической гипотезе: о наличии либо отсутствии радиоволны ИРИ, излучающего с некоторого азимута в неподвижной земной СК (топографической проекции Гаусса-Крюгера).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| Способ повышения точности и достоверности пеленгования при накоплении спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696094C1 |
| Способ моноимпульсного пеленгования источников поляризованных радиосигналов | 2024 |
|
RU2834965C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| Способ контроля излучения нескольких источников частотно-неразделимых сигналов | 2019 |
|
RU2704027C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| Способ адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696022C1 |
Изобретение относится к радиотехнике и может быть использовано в многоканальных моноимпульсных обнаружителях-пеленгаторах (ОП) систем радиомониторинга для определения азимута и угла места на источник радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС). Достигаемый технический результат – повышение эффективности азимутального пеленгования наземных ИРИ с произвольно ориентированного ЛПС. Технический результат достигается за счет использования навигационной информации об углах пространственной ориентации антенной решетки (АР) и преобразовании не результатов пеленгования, а характеристик направленности АР из связанной подвижной системы координат (СК) в неподвижную СК, связанную с Землей. Это позволяет осуществлять пеленгование и поиск азимута на ИРИ в криволинейном срезе двумерного азимутально-угломестного пеленгационного рельефа, соответствующем эволюции ориентации вектора направления прихода радиоволны в азимутальном круге при произвольной ориентации АР, размещенной на ЛПС. Благодаря такому учету информации об ориентации ЛПС обеспечивается повышение точности и достоверности пеленгования наземных ИРИ. Кроме того, в предлагаемом способе оценка «достоверности» пеленгования ИРИ обеспечивает необходимую селекцию результатов пеленгования по показателю достоверности с повышением точности и достоверности пеленгования ИРИ с ЛПС в реальных условиях. Способ учитывает наличие межканальной корреляции принимаемых спектральных компонент радиосигналов, обусловленной наличием в реальных условиях внешних помех, является работоспособным в условиях априорно неизвестной интенсивности помех в различных пространственных каналах приема. 6 ил.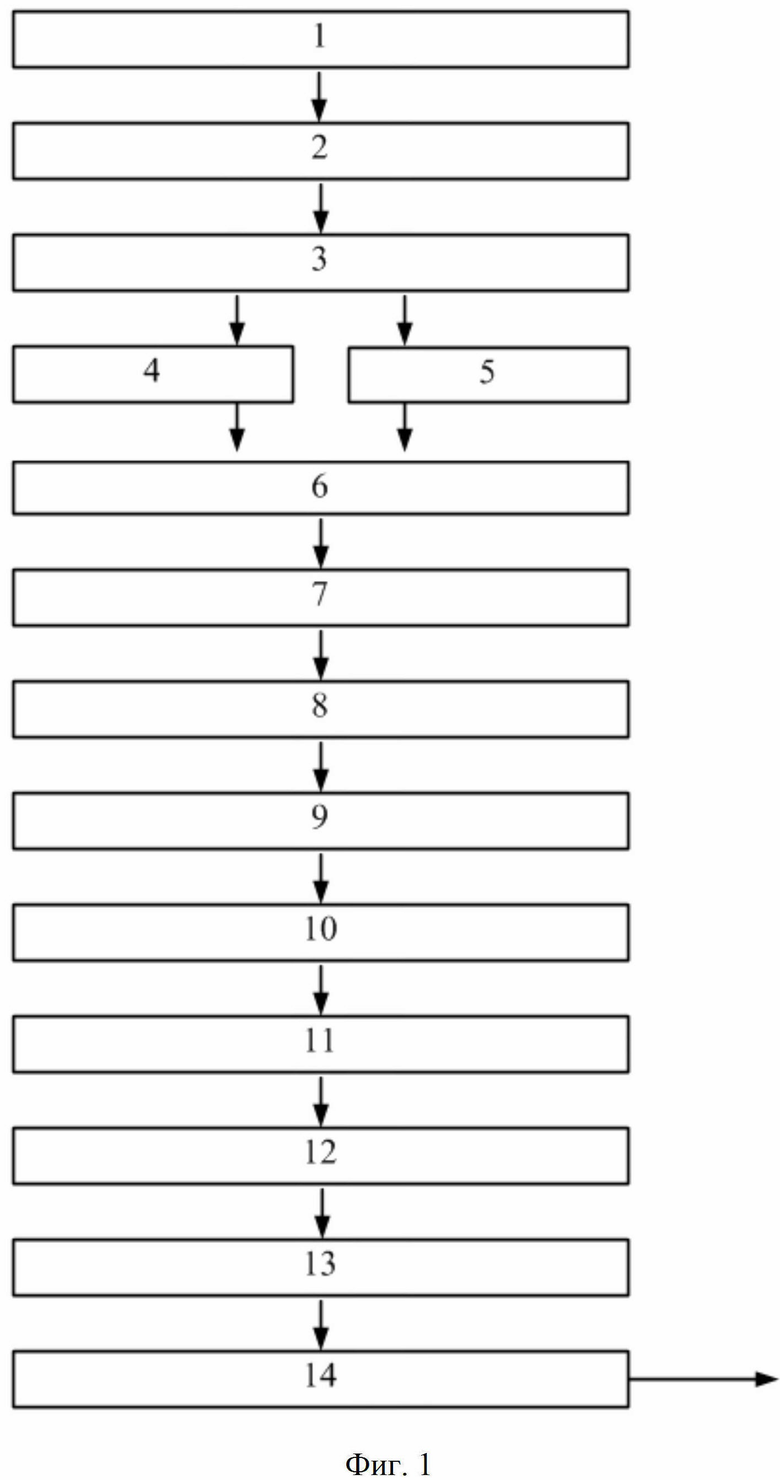
Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения (ИРИ) с летно-подъемного средства (ЛПС), включающий многократный последовательный во времени синхронный прием сигналов во временной области, одновременно попадающих в текущую полосу приема и анализа с выходов всех антенн антенной решетки (АР) в пространственных каналах обнаружителя-пеленгатора (ОП), синхронный перенос на более низкую частоту, синхронное преобразование сигналов во временной области в цифровую форму, вычисление отсчетов быстрого преобразования Фурье каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора, по каждому спектральному отчету вычисление канальных и взаимных – межканальных энергий быстрого преобразования Фурье и накопление энергий путем суммирования их значений, вычисленных по каждому принятому сигналу, и формирование матрицы  взаимных энергий, равной произведению
взаимных энергий, равной произведению  накопленной матрицы
накопленной матрицы  взаимных энергий сигналов по серии из K>1 измерений и матрицы
взаимных энергий сигналов по серии из K>1 измерений и матрицы  , обратной к матрице корреляции
, обратной к матрице корреляции  аддитивного шума, формирование единичного вектора k0 направления на ИРИ в земной системе координат (СК) по измеренным навигационным параметрам ЛПС, формирование одномерной векторной комплексной диаграммы направленности АР с произвольными структурой и характеристиками направленности антенных элементов
аддитивного шума, формирование единичного вектора k0 направления на ИРИ в земной системе координат (СК) по измеренным навигационным параметрам ЛПС, формирование одномерной векторной комплексной диаграммы направленности АР с произвольными структурой и характеристиками направленности антенных элементов  для каждого обнаруженного сигнала на частоте
для каждого обнаруженного сигнала на частоте  в земной СК, зависящей от ориентации ЛПС в пространстве, измерение значений пеленгационного рельефа (ПР) для каждого i-го обнаруженного сигнала на частоте с различных азимутальных направлений в земной СК, с учетом межканальной корреляции спектральных отсчетов сигнала, вычисление максимального значения ПР
в земной СК, зависящей от ориентации ЛПС в пространстве, измерение значений пеленгационного рельефа (ПР) для каждого i-го обнаруженного сигнала на частоте с различных азимутальных направлений в земной СК, с учетом межканальной корреляции спектральных отсчетов сигнала, вычисление максимального значения ПР  (ϕ – угол крена, θ – угол тангажа, ψ – угол рысканья); для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, оценка направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте , отличающийся тем, что выполняют процедуры адаптивного к неизвестной интенсивности шума обнаружения спектральных компонент сигналов и их отождествления по принадлежности к одному и тому же ИРИ, вычисляют значения адаптивного к неизвестной интенсивности шума ПР для каждого i-го обнаруженного сигнала на частоте с различных азимутальных направлений в земной СК, с учетом межканальной корреляции спектральных отсчетов сигнала по формуле:
(ϕ – угол крена, θ – угол тангажа, ψ – угол рысканья); для каждого i-го обнаруженного сигнала на частоте по возможным азимутальным направлениям прихода радиоволны, оценка направления прихода радиоволны для каждого i-го обнаруженного сигнала на частоте , отличающийся тем, что выполняют процедуры адаптивного к неизвестной интенсивности шума обнаружения спектральных компонент сигналов и их отождествления по принадлежности к одному и тому же ИРИ, вычисляют значения адаптивного к неизвестной интенсивности шума ПР для каждого i-го обнаруженного сигнала на частоте с различных азимутальных направлений в земной СК, с учетом межканальной корреляции спектральных отсчетов сигнала по формуле:

где  – матрица коэффициентов межканальной корреляции аддитивного шума;
– матрица коэффициентов межканальной корреляции аддитивного шума;
оценивают «достоверность» пеленгования ИРИ по результатам вычисления и сравнения решающей статистики  с порогом h, выбираемым согласно критерию Неймана-Пирсона,
с порогом h, выбираемым согласно критерию Неймана-Пирсона, 
 .
.
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| Способ амплитудного двухмерного пеленгования | 2016 |
|
RU2620130C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434239C1 |
| АРТЕМОВА Е.С., СЛИЧЕНКО М.П | |||
| Азимутальное пеленгование наземных источников радиоизлучения при размещении плоской антенной решетки произвольной конфигурации на летательном аппарате // Антенны, 2019 г., N.3, | |||

