Изобретение относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения (ИРИ), и может быть использовано в навигационных, пеленгационных, локационных средствах для определения координат ИРИ с летно-подъемного средства (ЛПС), в частности с беспилотного ЛПС.
Для увеличения точности и достоверности определения координат, необходимо достигнуть высокой точности азимутального и угломестного пеленгования. В таких случаях возможны различные технические или алгоритмические решения. Так, в способе двухмерного моноимпульсного пеленгования источников радиоизлучения [Артемов М.Л., Афанасьев О.В., Сличенко М.П., Артемова Е.С.Способ двухмерного моноимпульсного пеленгования источников радиоизлучений. Патент РФ №2696095, G01S 5/04] авторами предлагается использование объемной винтовой антенной решетки, обеспечивающей высокую точность угломестного пеленгования, а, следовательно, и определения координат ИРИ. В практике радиомониторинга возможны ситуации, когда отношение высоты полета ЛПС к дальности до ИРИ составляет много меньше единицы (радиомониторинг ИРИ на дальностях до ЛПС близких к радиогоризонту). В таких случаях информативным признаком пространственного положения наземного ИРИ является лишь азимут, а реализация антенной решетки (АР) объемной структуры представляется нецелесообразной. В способе по патенту РФ №2732505, G01S 5/04, Артемов М.Л., Афанасьев О.В., Сличенко М.П., Артемова Е.С.Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства при реализации алгоритмов пеленгования учитывается изменение углов пространственной ориентации ЛПС в процессе его движения, что позволяет устранить дополнительные ошибки пеленгования и уменьшить вероятность аномальной ошибки. Результаты оценивания направления на ИРИ используются для определения координат ИРИ триангуляционным способом.
Известен способ определения координат источника радиоизлучения, представленный в [Терентьев А.В., Соломатин А.И., Смирнов П.Л., Царик О.В, Шепилов А.М., Шишков В.А. Способ и устройство определения координат источника радиоизлучения. Патент РФ №2283505, G01S 13/46]. Данный способ заключается в приеме сигналов ИРИ в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерении первичных пространственно-информационных параметров (ППИП) обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения пеленгатора и пространственной ориентации его антенной решетки (АР), при этом на подготовительном этапе рассчитывают и запоминают эталонные значения первичных пространственно-информационных параметров на выходах антенных элементов антенной решетки пеленгатора, находят разность между эталонными и измеренными значениями пространственно-информационных параметров (ППИП), особым способом формируют матрицу измерений, после нескольких итераций по минимальному элементу матрицы принимают решение о координатах ИРИ.
Указанный способ позволяет повысить точность определения координат за счет использования одноэтапной обработки ППИП. В качестве недостатков данного способа следует отметить следующие:
- способу присущи большие временные затраты на решение поставленной задачи;
- в связи с тем, что подвижный пеленгатор находится на поверхности земли, в УКВ-СВЧ-диапазонах способ является работоспособным в достаточно ограниченной пространственной области, размеры которой определяются характерными для указанных диапазонов эффектами, сопровождающими распространение радиоволн.
Известен способ определения координат ИРИ [Наливаев А.В., Наумов А.С., Смирнов П.Л., Соломатин А.И., Терентьев А.В., Царик О.В., Шепилов А.М. Способ и устройство определения координат источника радиоизлучения. Патент РФ №2458360, G01S 13/46]. Указанный способ заключается в том, что принимают сигналы ИРИ в заданной полосе частот  перемещающимся в пространстве бортовым пеленгатором, установленным на ЛПС, измеряют пространственно-информационные параметры обнаруженных сигналов: азимут
перемещающимся в пространстве бортовым пеленгатором, установленным на ЛПС, измеряют пространственно-информационные параметры обнаруженных сигналов: азимут  и угол места
и угол места  в системе координат антенной системы с одновременным определением местоположения ЛПС
в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени
в момент времени  , где
, где  ,
,  ,
,  - соответственно широта, долгота и высота ЛПС, переводят координаты ЛПС
- соответственно широта, долгота и высота ЛПС, переводят координаты ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектор направления на
, а вектор направления на  -й ИРИ
-й ИРИ  - в левостороннюю систему декартовых координат
- в левостороннюю систему декартовых координат  , корректируют вектор направления на -й ИРИ
, корректируют вектор направления на -й ИРИ  с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС
с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС  , где
, где  ,
,  ,
,  - соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений
- соответственно углы крена, тангажа и склонения антенной системы, путем последовательного умножения значений  на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления
на соответствующие углам Эйлера матрицы поворота, после чего в нормальной системе координат вычисляют уточненное значение вектора направления  на -й ИРИ с учетом измеренных в момент времени пространственных углов ЛПС: крена
на -й ИРИ с учетом измеренных в момент времени пространственных углов ЛПС: крена  , тангажа
, тангажа  и склонения
и склонения  , определяют уточненные значения азимута
, определяют уточненные значения азимута  , угла места
, угла места  и удаление ЛПС, находящегося в момент времени на высоте
и удаление ЛПС, находящегося в момент времени на высоте  , от -го ИРИ
, от -го ИРИ  , расположенного на поверхности «круглой» Земли, в противном случае, при невозможности получения начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на -й ИРИ
, расположенного на поверхности «круглой» Земли, в противном случае, при невозможности получения начинают новый цикл измерений, в геоцентрической системе координат определяют значение истинного вектора направления на -й ИРИ  , которое зависит от широты
, которое зависит от широты  и долготы
и долготы  местоположения ЛПС, определяют координаты точки пересечения вектора с «круглой» Землей
местоположения ЛПС, определяют координаты точки пересечения вектора с «круглой» Землей  , преобразуют геоцентрические координаты -го ИРИ в географические
, преобразуют геоцентрические координаты -го ИРИ в географические  , где
, где  и
и  - соответственно широта и долгота -го ИРИ, результаты вычислений уточненного угла места сравнивают с пороговым значением
- соответственно широта и долгота -го ИРИ, результаты вычислений уточненного угла места сравнивают с пороговым значением  , определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии
, определяющим заданную потенциальную точность измерения местоположения ИРИ, при невыполнении пороговых условии  , а также при выполнении пороговых условии
, а также при выполнении пороговых условии  и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат -го ИРИ используют значение
и отсутствии цифровой карты рельефа местности района измерений, представляющей собой матрицу с заданной дискретностью по координатам района измерений с соответствующими значениями высот рельефа, в качестве координат -го ИРИ используют значение  , при выполнении пороговых условий и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот
, при выполнении пороговых условий и наличии цифровой карты рельефа района измерений формируют последовательный набор значений высот  , j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты
, j=1, 2, …, J, который соответствует равномерно распределенным координатам на отрезке, соединяющем координаты  и
и  ,
,  , где
, где  - шаг сканирования по вектору направления
- шаг сканирования по вектору направления  на -й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты
на -й ИРИ, определяется заданной точностью предварительного измерения координат ИРИ, рассчитывают координаты  , соответствующие дискретно выделенным высотам рельефа местности
, соответствующие дискретно выделенным высотам рельефа местности  , а за предварительные координаты
, а за предварительные координаты  -го ИРИ принимают первую точку разбиения вектора
-го ИРИ принимают первую точку разбиения вектора  , находящуюся ниже уровня рельефа местности, уточняют местоположение -го ИРИ путем выделения соседней точки разбиения
, находящуюся ниже уровня рельефа местности, уточняют местоположение -го ИРИ путем выделения соседней точки разбиения  , находящейся над рельефом местности, отрезок
, находящейся над рельефом местности, отрезок  ,
,  вектора направления на -й ИРИ
вектора направления на -й ИРИ  делят на δ равных интервалов, Δδ <<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления
делят на δ равных интервалов, Δδ <<Δd, где Δδ - шаг сканирования по выделенному отрезку вектора направления  и определяется конечной заданной точностью измерения координат ИРИ, для назначенных точек вычисляют координаты
и определяется конечной заданной точностью измерения координат ИРИ, для назначенных точек вычисляют координаты  и соответствующие им значения высот рельефа местности
и соответствующие им значения высот рельефа местности  , за точные координаты -го ИРИ принимают значение
, за точные координаты -го ИРИ принимают значение  , находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат -го ИРИ преобразуют в удобную географическую систему координат
, находящееся между соседними точками, расположенными выше или ниже рельефа местности, а полученное значение координат -го ИРИ преобразуют в удобную географическую систему координат  .
.
Данный способ предполагает оценивание местоположения ИРИ по результатам однократного однопозиционного пеленгования как точки пересечения луча пеленга, заданного в геоцентрической системе координат, с поверхностью Земли, описанной в той же системе координат массивом дискретных точек, с последующим усреднением таких однопозиционных оценок; однако алгоритм такого усреднения в описании способа в явном виде не приводится.
Недостатком этого способа является ограниченная дальность действия, поскольку при дальностях от ЛПС до ИРИ, превышающих высоту полета ЛПС, ошибки определения дальности достаточно быстро возрастают с увеличением дальности. Это обусловлено. уменьшением угла пересечения пеленга с земной поверхностью (угла места) и увеличением среднеквадратической ошибки измерения этого угла (по крайней мере, при использовании предложенной в том же патенте плоской горизонтальной антенной решетки). Кроме того, возрастают ошибки определения дальности, обусловленные ошибками измерения крена и тангажа ЛПС, отклонением рельефа земной поверхности от горизонтали и даже неопределенностью относительно высоты подъема передающей антенны ИРИ над земной поверхностью.
Наиболее близким аналогом по технической сущности к предлагаемому является способ определения координат источника радиоизлучения [Гетманцев А.А., Елизаров В.В., Магомедов Т.Г., Наумов А.С., Смирнов П.Л., Терентьев А.В., Царик О.В. Способ и устройство определения координат источников радиоизлучения. Патент РФ №2659810, G01S 13/46], принятый за прототип.
Способ-прототип выполняет следующие процедуры.
1. Прием сигналов ИРИ в заданной полосе частот  перемещающимся в пространстве бортовым пеленгатором;
перемещающимся в пространстве бортовым пеленгатором;
2. Измерение пространственно-информационных параметров обнаруженных сигналов: азимут  (пеленг) и угол места
(пеленг) и угол места  в системе координат антенной системы с одновременным определением местоположения ЛПС
в системе координат антенной системы с одновременным определением местоположения ЛПС  в момент времени
в момент времени  , где
, где  ,
,  ,
,  - соответственно широта, долгота и высота ЛПС;
- соответственно широта, долгота и высота ЛПС;
3. Преобразование координат ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  , а вектор направления на
, а вектор направления на  -й ИРИ
-й ИРИ  в связанную с пеленгаторной антенной системой левостороннюю систему декартовых координат
в связанную с пеленгаторной антенной системой левостороннюю систему декартовых координат  ;
;
4. Преобразование вектора направления на  -й ИРИ из связанной системы координат в нормальную земную систему координат
-й ИРИ из связанной системы координат в нормальную земную систему координат  путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота;
путем последовательного умножения значений на соответствующие углам Эйлера матрицы поворота;
5. Устанавливают/Задают (в географических координатах) границы зоны поиска ИРИ первого уровня  , на поверхности которой равномерно распределяют
, на поверхности которой равномерно распределяют  контрольных точек (подготовительный этап);
контрольных точек (подготовительный этап);
6. Определение для каждой  -й контрольной точки,
-й контрольной точки,  , первого уровня географических координат
, первого уровня географических координат  ;
;
7. Определение контрольной точки  первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов
первого уровня с наибольшим количеством проходящих в пределах локальной зоны с радиусом R пеленгов  ;
;
8. Задание размеров зоны поиска ИРИ второго уровня по широте и долготе соответствующие расстоянию между контрольными точками зоны поиска ИРИ первого уровня (подготовительный этап);
9. Выделение/Обозначение зоны поиска ИРИ второго уровня  , центром которой являются координаты
, центром которой являются координаты  -й контрольной точки зоны поиска ИРИ первого уровня;
-й контрольной точки зоны поиска ИРИ первого уровня;
10. Распределение на поверхности зоны поиска ИРИ второго уровня равномерно  , контрольных точек с шагом
, контрольных точек с шагом  , значение которого задают с учетом необходимой точности измерения координат ИРИ;
, значение которого задают с учетом необходимой точности измерения координат ИРИ;
11. Определение географические координаты  зоны поиска ИРИ;
зоны поиска ИРИ;
12. Нахождение контрольной точки  зоны поиска ИРИ второго уровня с наибольшим количеством
зоны поиска ИРИ второго уровня с наибольшим количеством  , проходящих в пределах локальной зоны с радиусом
, проходящих в пределах локальной зоны с радиусом  пеленгов
пеленгов  ;
;
13. Сравнение количества  полученных пеленгов
полученных пеленгов  с заданным на подготовительном этапе порогом
с заданным на подготовительном этапе порогом  ;
;
14. Определение географических координат  -го ИРИ
-го ИРИ  после выполнения пороговых условий
после выполнения пороговых условий  на основе выделенных
на основе выделенных  значений пеленгов методом наименьших квадратов.
значений пеленгов методом наименьших квадратов.
Основными недостатками прототипа являются:
1. Для решения поставленной задачи необходимы большие временные затраты, обусловленные преобразованием координат из географической системы координат в геоцентрическую и обратно.
2. Способ-прототип предполагает разбиение зоны поиска на прямоугольные локальные зоны, ранжирование таких зон по количеству проходящих через них измеренных пеленгов и поиск методом наименьших квадратов оценок координат ИРИ внутри локальных зон, через которые проходят измеренные пеленги в количестве, превышающем установленный порог.Однако взаимное расположение пеленгуемых ИРИ и назначаемых локальных зон случайно, и при расположении действительного ИРИ вблизи стыка двух или четырех локальных зон, способ-прототип, как показывает имитационное моделирование, может выдавать информацию об обнаружении двух, трех или четырех ИРИ, находящихся в смежных локальных зонах, т.е. происходит появление ложных ИРИ.
Задачей, на решение которой направлено данное изобретение, является повышение точности и достоверности определения географических координат источников радиоизлучения с сокращением временных затрат, снижение вероятности появления ложных ИРИ, обеспечение возможности сравнительной оценки интенсивности работы обнаруженных ИРИ.
Для решения поставленной задачи, в способе определения географических координат источников радиоизлучения (ИРИ) в многоцелевой обстановке, заключающемся в том, что принимают сигналы ИРИ в заданной полосе частот перемещающимся в пространстве бортовым радиопеленгатором, установленным на летно-подъемном средстве (ЛПС), измеряют пространственно-информационные параметры обнаруженных сигналов: азимут (пеленг) и угол места в сферической системе координат, связанной с антенной системой радиопеленгатора, - с одновременным определением географических координат местоположения ЛПС и параметров его пространственной ориентации, углов Эйлера, относительно нормальной земной левосторонней системы координат в этой точке в момент времени ti, вектор направления на ИРИ представляют в виде тройки направляющих косинусов в декартовой системе координат, связанной с антенной системой, и преобразуют в упомянутую нормальную земную систему координат путем последовательного умножения на две матрицы поворота: из системы координат антенной системы в систему координат ЛПС с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно строительных осей ЛПС и из системы координат ЛПС в нормальную земную систему координат с учетом измеренных в момент времени ti пространственных углов ЛПС: курса, тангажа и крена, определяют значение азимута  на ИРИ, расположенный на поверхности «круглой» Земли, в географической системе координат в момент времени ti, и запоминают его совместно с географическими координатами ЛПС в момент времени ti, дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ, разделяют зону поиска на
на ИРИ, расположенный на поверхности «круглой» Земли, в географической системе координат в момент времени ti, и запоминают его совместно с географическими координатами ЛПС в момент времени ti, дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ, разделяют зону поиска на  локальных зон, размеры которых определяются априорно известной точностью пеленгования центра локальной зоны из всех точек траектории ЛПС, например по уровню
локальных зон, размеры которых определяются априорно известной точностью пеленгования центра локальной зоны из всех точек траектории ЛПС, например по уровню  , определяют географические координаты
, определяют географические координаты 
 контрольных точек - геометрических центров локальных зон, а в процессе работы подсчитывают для каждой контрольной точки количество измеренных пеленгов, отклоняющихся от этой точки на угол не более
контрольных точек - геометрических центров локальных зон, а в процессе работы подсчитывают для каждой контрольной точки количество измеренных пеленгов, отклоняющихся от этой точки на угол не более  , согласно изобретению, на полученном таким образом распределении измеренных пеленгов по контрольным точкам выделяют локальные максимумы, координаты контрольных точек, соответствующих положениям этих максимумов, при условии, что число пеленгов в максимуме не превышает заданного порога, принимают за начальное приближение координат ИРИ
, согласно изобретению, на полученном таким образом распределении измеренных пеленгов по контрольным точкам выделяют локальные максимумы, координаты контрольных точек, соответствующих положениям этих максимумов, при условии, что число пеленгов в максимуме не превышает заданного порога, принимают за начальное приближение координат ИРИ 
 , а величину
, а величину
 ,
,
- за начальное приближение вероятности  выхода в эфир данного ИРИ, где
выхода в эфир данного ИРИ, где  - число пеленгов, проходящих вблизи m-й контрольной точки, m=1…M;
- число пеленгов, проходящих вблизи m-й контрольной точки, m=1…M;  - априорная вероятность того, что среди всех измеренных пеленгов присутствуют пеленги, не принадлежащие ни одному из
- априорная вероятность того, что среди всех измеренных пеленгов присутствуют пеленги, не принадлежащие ни одному из  ИРИ;
ИРИ;
для начального приближения вычисляют функцию правдоподобия по формуле
 ,
,
а также компоненты градиента функции правдоподобия по формулам
 ,
,
 ,
,
 .
.
где  - измеренный пеленг с
- измеренный пеленг с  -й позиции пеленгатора,
-й позиции пеленгатора,  - истинное значение пеленга с
- истинное значение пеленга с  -й позиции пеленгатора в текущее
-й позиции пеленгатора в текущее  -е приближение позиции
-е приближение позиции  -го ИРИ, в ходе итерационной процедуры, варьируя значения координат
-го ИРИ, в ходе итерационной процедуры, варьируя значения координат  и вероятностей
и вероятностей  выхода в эфир всех ИРИ (
выхода в эфир всех ИРИ ( ,
, - номер итерации) находят глобальный максимум функции правдоподобия, значения координат и вероятностей, полученные в последней итерации, принимают за соответствующие параметры обнаруженных ИРИ.
- номер итерации) находят глобальный максимум функции правдоподобия, значения координат и вероятностей, полученные в последней итерации, принимают за соответствующие параметры обнаруженных ИРИ.
Предлагаемый способ определения географических координат источников радиоизлучения в многоцелевой обстановке включает выполнение следующих процедур:
1. На подготовительном этапе определяют в географических координатах зону поиска ИРИ, назначают траекторию движения ЛПС и покрывают зону поиска эквидистантной двухмерной сеткой контрольных точек  , где
, где  и
и  - индексы по широте и долготе соответственно. Шаг сетки примерно соответствует удвоенной априорно известной среднеквадратической эквивалентной инструментальной ошибке пеленгования с выбранной траектории ЛПС (с учетом ошибок измерения пространственной ориентации ЛПС).
- индексы по широте и долготе соответственно. Шаг сетки примерно соответствует удвоенной априорно известной среднеквадратической эквивалентной инструментальной ошибке пеленгования с выбранной траектории ЛПС (с учетом ошибок измерения пространственной ориентации ЛПС).
2. В процессе полета ЛПС принимают сигналы ИРИ в заданной полосе частот  бортовым пеленгатором, перемещающимся в пространстве, и измеряют в моменты времени
бортовым пеленгатором, перемещающимся в пространстве, и измеряют в моменты времени  пространственно-информационные параметры обнаруженных сигналов: азимут
пространственно-информационные параметры обнаруженных сигналов: азимут  (пеленг) и угол места
(пеленг) и угол места  в системе координат пеленгаторной антенной системы с одновременным определением местоположения ЛПС: широты
в системе координат пеленгаторной антенной системы с одновременным определением местоположения ЛПС: широты  ,долготы
,долготы  и высоты
и высоты  - и углов ориентации (углов Эйлера): курса
- и углов ориентации (углов Эйлера): курса  тангажа
тангажа  и крена
и крена  [ГОСТ 20058-80].
[ГОСТ 20058-80].
3. Преобразуют измеренный в связанной с антенной системой пеленгатора СК двухмерный пеленг «азимут-угол места» в трехмерный вектор направляющих косинусов в этой же системе.
 (1)
(1)
Преобразуют трехмерный вектор направления из связанной системы координат в нормальную левостороннюю земную систему координат, ось  которой совпадает с направлением на Север, а начало находится в центре пеленгаторной антенной системы в момент времени , путем последовательного умножения на матрицу связи координатной системы антенной системы с системой координат строительных осей ЛПС (в частном случае соосного размещения АС на ЛПС эта матрица единичная, и умножение пропускается) и на матрицу поворота ЛПС в нормальной земной системе координат в соответствии с измеренными углами Эйлера.
которой совпадает с направлением на Север, а начало находится в центре пеленгаторной антенной системы в момент времени , путем последовательного умножения на матрицу связи координатной системы антенной системы с системой координат строительных осей ЛПС (в частном случае соосного размещения АС на ЛПС эта матрица единичная, и умножение пропускается) и на матрицу поворота ЛПС в нормальной земной системе координат в соответствии с измеренными углами Эйлера.
 , (2)
, (2)
где  матрица размера 3×3 из направляющих косинусов ортов связанной системы координат антенной системы в системе координат ЛПС. В случае согласованного соосного размещения антенной системы на ЛПС это единичная матрица, и ее можно из этого выражения исключить.
матрица размера 3×3 из направляющих косинусов ортов связанной системы координат антенной системы в системе координат ЛПС. В случае согласованного соосного размещения антенной системы на ЛПС это единичная матрица, и ее можно из этого выражения исключить.
 - зависящая от углов Эйлера матрица направляющих косинусов осей системы координат ЛПС в нормальной земной левосторонней системе координат
- зависящая от углов Эйлера матрица направляющих косинусов осей системы координат ЛПС в нормальной земной левосторонней системе координат
 , (3)
, (3)
где  ,
,  и
и  - соответственно углы курса, тангажа и крена ЛПС в момент времени .
- соответственно углы курса, тангажа и крена ЛПС в момент времени .
4. Вычисляют тригонометрические функции  и
и  азимута направления на ИРИ в топоцентрической системе координат, совпадающего с азимутом в географической системе координат
азимута направления на ИРИ в топоцентрической системе координат, совпадающего с азимутом в географической системе координат 
 . (4)
. (4)
Полученные таким образом значения  и
и  для
для  -ой точки траектории ЛПС записывают в индексированный по массив записей вместе с синусами и косинусами географических координат этой точки
-ой точки траектории ЛПС записывают в индексированный по массив записей вместе с синусами и косинусами географических координат этой точки  ,
,  ,
, и
и  .
.
5. Для каждой контрольной точки  зоны поиска и каждой точки пеленгования
зоны поиска и каждой точки пеленгования  на траектории ЛПС решением обратной геодезической задачи [Морозов В.П. Курс сфероидической геодезии. стр. 100-101] вычисляют истинное значение азимута направления в контрольную точку и угловое отклонение измеренного пеленга
на траектории ЛПС решением обратной геодезической задачи [Морозов В.П. Курс сфероидической геодезии. стр. 100-101] вычисляют истинное значение азимута направления в контрольную точку и угловое отклонение измеренного пеленга  с i-й позиции радиопеленгатора от истинного значения пеленга текущей точки по формуле
с i-й позиции радиопеленгатора от истинного значения пеленга текущей точки по формуле
 (5)
(5)
где  - истинное значение пеленга на текущую точку с i-й позиции пеленгатора, получаемое в результате решения обратной геодезической задачи;
- истинное значение пеленга на текущую точку с i-й позиции пеленгатора, получаемое в результате решения обратной геодезической задачи;
 , (6)
, (6)
 , (7)
, (7)
 , (8)
, (8)
 . (9)
. (9)
Подсчитывают число  пеленгов, отклоняющихся от каждой контрольной точки на угол не более , где
пеленгов, отклоняющихся от каждой контрольной точки на угол не более , где  - СКО пеленгования, и записывают в двухмерный массив, соответствующий сетке контрольных точек.
- СКО пеленгования, и записывают в двухмерный массив, соответствующий сетке контрольных точек.
6. Анализируют полученный массив и находят в нем контрольные точки, соответствующие центрам областей локальных максимумов распределения измеренных пеленгов, определяемых следующим образом.
Для каждой контрольной точки с индексами  зоны поиска и каждого из I измеренных пеленгов вычисляют угловое отклонение данной точки от пеленга, при этом подсчитывают пеленги, отклоняющиеся на угол не более порогового (например
зоны поиска и каждого из I измеренных пеленгов вычисляют угловое отклонение данной точки от пеленга, при этом подсчитывают пеленги, отклоняющиеся на угол не более порогового (например  ). Число таких пеленгов записывают в ячейку массива, соответствующую данной контрольной точке.
). Число таких пеленгов записывают в ячейку массива, соответствующую данной контрольной точке.
После заполнения массива, отображающего все контрольные точки, его ячейки ранжируют в порядке убывания числа  пеленгов, проходящих вблизи соответствующей контрольной точки с сохранением исходной двухмерной индексации контрольных точек по широте и долготе . Первая ячейка этого ранжированного ряда соответствует наибольшему локальному максимуму плотности распределения измеренных пеленгов и соответствующую ей контрольную точку принимают за начальное приближение координат первого ИРИ и записывают в качестве первого элемента
пеленгов, проходящих вблизи соответствующей контрольной точки с сохранением исходной двухмерной индексации контрольных точек по широте и долготе . Первая ячейка этого ранжированного ряда соответствует наибольшему локальному максимуму плотности распределения измеренных пеленгов и соответствующую ей контрольную точку принимают за начальное приближение координат первого ИРИ и записывают в качестве первого элемента  в ряд гипотетических обнаруженных ИРИ. Последующие в ранжированном по убыванию
в ряд гипотетических обнаруженных ИРИ. Последующие в ранжированном по убыванию  ряду контрольные точки проверяют по исходным двухмерным индексам на принадлежность к зоне притяжения обнаруженного максимума. Принимается решение, что точка принадлежит зоне притяжения максимума, если она является смежной хотя бы по одному индексу
ряду контрольные точки проверяют по исходным двухмерным индексам на принадлежность к зоне притяжения обнаруженного максимума. Принимается решение, что точка принадлежит зоне притяжения максимума, если она является смежной хотя бы по одному индексу  или
или  с точкой максимума или с точкой, уже причисленной к зоне притяжения данного максимума. При обнаружении в ранжированном ряду контрольной точки, не принадлежащей зоне притяжения обнаруженного максимума, она принимается за точку следующего локального максимума, а последующие в ряду контрольные точки причисляются к зоне притяжения одного из уже обнаруженных локальных максимумов, либо (при отсутствии смежных точек, принадлежащих ранее обнаруженным зонам) принимается за точку последующего локального максимума. Поиск прекращается, когда найден последний максимум, соответствующий неравенству
с точкой максимума или с точкой, уже причисленной к зоне притяжения данного максимума. При обнаружении в ранжированном ряду контрольной точки, не принадлежащей зоне притяжения обнаруженного максимума, она принимается за точку следующего локального максимума, а последующие в ряду контрольные точки причисляются к зоне притяжения одного из уже обнаруженных локальных максимумов, либо (при отсутствии смежных точек, принадлежащих ранее обнаруженным зонам) принимается за точку последующего локального максимума. Поиск прекращается, когда найден последний максимум, соответствующий неравенству  .
.
7. Отбирают из числа этих точек  точек, для которых число пеленгов
точек, для которых число пеленгов  не менее заданного минимального числа. Принимают координаты этих точек за начальное (нулевое) приближение координат
не менее заданного минимального числа. Принимают координаты этих точек за начальное (нулевое) приближение координат  обнаруженных ИРИ, а нулевое приближение вероятности
обнаруженных ИРИ, а нулевое приближение вероятности  обнаружения
обнаружения  -го ИРИ при начальном условии, что в выборке измеренных пеленгов с вероятностью
-го ИРИ при начальном условии, что в выборке измеренных пеленгов с вероятностью  (например,
(например,  ) присутствуют пеленги, не принадлежащие ни одному из ИРИ, вычисляют по формуле:
) присутствуют пеленги, не принадлежащие ни одному из ИРИ, вычисляют по формуле:
 (10)
(10)
8. Уточняют оценки координат  и вероятностей
и вероятностей  обнаружения всех
обнаружения всех  ИРИ по методу максимального правдоподобия. Условная совместная плотность вероятностей выборки из
ИРИ по методу максимального правдоподобия. Условная совместная плотность вероятностей выборки из  измеренных пеленгов (функция правдоподобия координат
измеренных пеленгов (функция правдоподобия координат  и вероятностей
и вероятностей  ) может быть записана в виде:
) может быть записана в виде:
 , (11)
, (11)
где  - вероятность того, что
- вероятность того, что  -й пеленг принадлежит
-й пеленг принадлежит  -му ИРИ;
-му ИРИ;
 - априорно известное среднеквадратическое значение ошибки пеленгования с учетом ошибок ориентирования на трассе;
- априорно известное среднеквадратическое значение ошибки пеленгования с учетом ошибок ориентирования на трассе;
 - истинное значение пеленга на
- истинное значение пеленга на  -й ИРИ с
-й ИРИ с  -й позиции ЛПС;
-й позиции ЛПС;
 - вычисленное значение пеленга по результатам измерений на
- вычисленное значение пеленга по результатам измерений на  -й позиции ЛПС;
-й позиции ЛПС;
Здесь предполагается, что случайные пеленги, не принадлежащие ни одному из  ИРИ, распределены равномерно на интервале
ИРИ, распределены равномерно на интервале  с плотностью
с плотностью  .
.
Функция правдоподобия  зависит от
зависит от  -мерного вектора
-мерного вектора
 , (12)
, (12)
составленного из значений географических координат (широты и долготы) и вероятностей обнаружения  ИРИ. Производные этой функции по компонентам этого вектора, т.е. компоненты градиента
ИРИ. Производные этой функции по компонентам этого вектора, т.е. компоненты градиента  имеют вид:
имеют вид:
 , (13)
, (13)
компоненты градиента функции правдоподобия в пространстве искомых параметров ИРИ имеют вид:
, (14)
(15)
, (16)
Входящие в выражения (13)-(16) производные истинного значения пеленга на текущую точку с i-й позиции пеленгатора по географическим координатам этой точки  и
и  вычисляют по формулам
вычисляют по формулам
 , (17)
, (17)
 , (18)
, (18)
где
 , (19)
, (19)
 , (20)
, (20)
 , (21)
, (21)
 . (22)
. (22)
В соответствии с методом максимального правдоподобия за оценку координат ИРИ  и вероятностей
и вероятностей  их работы на излучение принимается совокупность значений этих величин, соответствующая положению глобального максимума функции правдоподобия.
их работы на излучение принимается совокупность значений этих величин, соответствующая положению глобального максимума функции правдоподобия.
Поиск таких значений осуществляется любым из известных методов численной оптимизации (например, [Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. Пер с англ. - М.: Мир, 1985.-509 с., ил.]) с использованием имеющегося начального приближения и аналитических выражений функции правдоподобия и ее градиента.
Предлагаемый способ определения географических координат источников радиоизлучения в многоцелевой обстановке лишен перечисленных выше недостатков прототипа, а именно:
1. Достигнуто снижение вычислительных затрат за счет выполнения основных расчетов в географической системе координат с минимальным количеством обращений к тригонометрическим функциям при полном исключении использования геоцентрических координат.
2. Предложенный алгоритм поиска локальных контрольных точек, в окрестностях которых проходит максимальное число измеренных пеленгов, позволяет корректно оценить число локальных максимумов функции правдоподобия в зоне поиска и снизить вероятность появления ложных ИРИ.
3. Максимизация функции правдоподобия в многомерном пространстве координат и вероятностей обнаружения ИРИ позволяет не только с максимальной точностью определить координаты нескольких обнаруженных за время наблюдения неразличимых по параметрам сигнала ИРИ, но и получить сравнительную оценку интенсивности их работы.
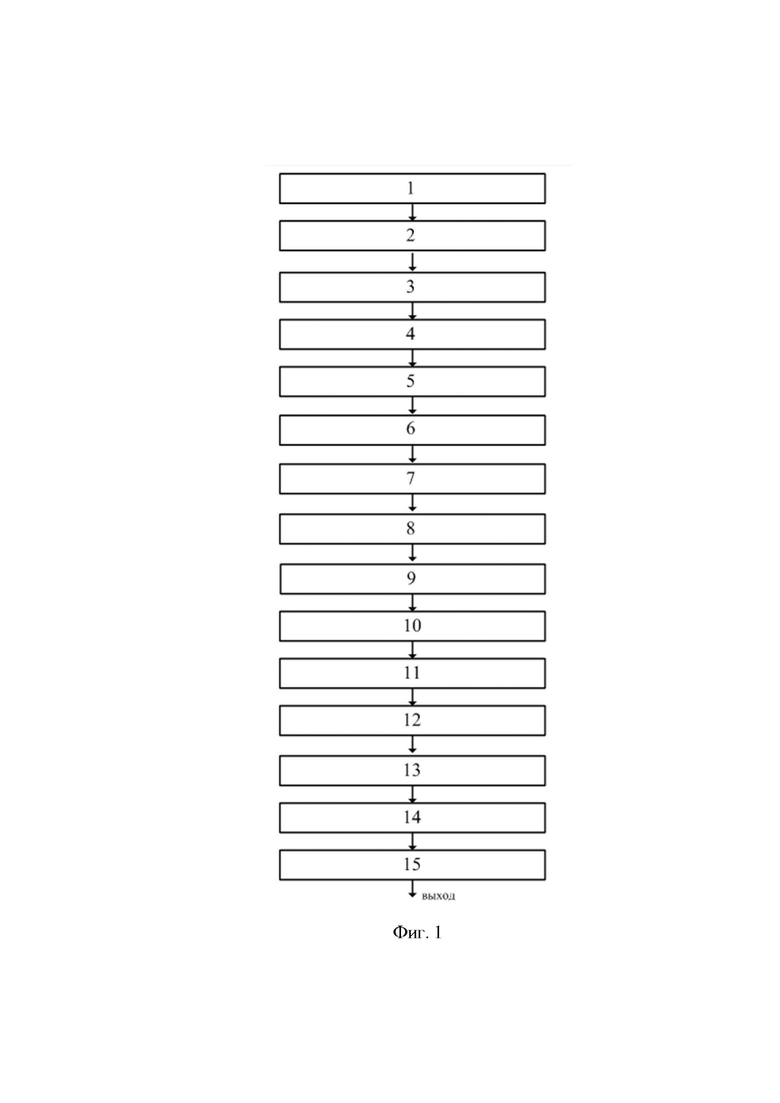
Блок-схема устройства (обнаружителя-пеленгатора) для реализации предлагаемого способа представлена на фиг.1, где обозначено:
1 - первый вычислитель;
2 - блок приема сигналов ИРИ;
3 - первое запоминающее устройство;
4, 5, 6, 7, 8 - второй, третий, четвертый, пятый и шестой вычислители;
9 - второе запоминающее устройство;
10 - седьмой вычислитель;
11 - третье запоминающее устройство;
12, 13, 15 - восьмой, девятый и десятый вычислители;
14 - четвертое запоминающее устройство.
Устройство содержит последовательно соединенные первый вычислитель 1, блок приема сигналов ИРИ 2, первое запоминающее устройство 3, со второго по шестой вычислители 4 - 8, второе запоминающее устройство 9, седьмой вычислитель 10, третье запоминающее устройство 11, восьмой 12 и девятый 13 вычислители, четвертое запоминающее устройство 14 и десятый вычислитель 15.
Устройство для реализации заявляемого способа работает следующим образом.
На подготовительном этапе первый вычислитель 1 определяет зону поиска ИРИ и назначают траекторию полета ЛПС. Зона поиска покрывается эквидистантной двухмерной сеткой контрольных точек.
В процессе полета ЛПС блок приема сигналов ИРИ осуществляет многократный последовательный во времени синхронный (когерентный) прием временных реализаций с выходов всех антенн АС в пространственных каналах обнаружителя-пеленгатора и когерентный перенос на более низкую частоту; синхронное преобразование принятых временных реализаций в цифровую форму; для каждой оцифрованной реализации в каждом пространственном канале обнаружителя-пеленгатора происходит вычисление отсчетов преобразования Фурье, по каждому из анализируемой пары спектральных отчетов преобразования Фурье вычисление действительных канальных и комплексных взаимных энергий; накопление для каждой пары спектральных отчетов по каждой из принятых временных реализаций канальных и взаимных энергий спектральных компонент путем суммирования их значений, вычисленных по каждой из принятых временных реализаций; формируется нормированная матрица взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов квадрата нормированной матрицы и квадрат суммы диагональных элементов нормированной матрицы, результаты вычислений подставляются в формулу решающей статистики [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л.. Сличенко М.П. Способ адаптивного пространственно-многоканального обнаружения спектральных компонент сигналов источников радиоизлучения. Патент РФ №2696022, G01S 5/04] и далее сравнивают решающую статистику с порогом, выбираемым по критерию Неймана-Пирсона. В случае превышения порога спектральные компоненты отождествляются по принадлежности к сигналу одного источника радиоизлучения путем формирования нормированной матрицы взаимных энергий, по результатам которой одновременно вычисляются суммы диагональных элементов и произведения сумм диагональных элементов, результаты которых подставляются в решающую статистику, которая сравнивается с порогом, выбираемым по критерию Неймана-Пирсона [Артемов М.Л., Афанасьев О.В., Абрамова Е.Л. Коненков Е.А., Сличенко М.П. Способ адаптивного отождествления спектральных компонент по принадлежности к сигналу одного источника радиоизлучения. Патент РФ №2696093, G01S 5/04]. В первом запоминающем устройстве 3 формируется массив пространственно-информационных параметров обнаруженных сигналов и местоположения ЛПС.Далее во втором вычислителе 4 преобразуется измеренный в связанной с антенной системой пеленгатора системе координат двухмерный пеленг «азимут-угол места» в трехмерный вектор направляющих косинусов в этой же системе по формуле (2). По результатам вычисления (второй вычислитель 4) в третьем вычислителе 5 определяют тригонометрические функции азимута направления на ИРИ в топоцентрической системе координат по формуле (4). Далее для каждой контрольной точки зоны поиска и каждой точки пеленгования на траектории ЛПС вычисляют истинное значение азимута направления в контрольную точку (четвертый вычислитель 6) и угловое отклонение измеренного пеленга с i-й позиции радиопеленгатора от истинного значения пеленга текущей точки (третий вычислитель 5) по формулам (5-9). Шестой вычислитель 8 определяет количество пеленгов, отклоняющихся от каждой контрольной точки на угол не более удвоенной СКО пеленгования, после чего во втором запоминающем устройстве 9 формируется двумерный массив пеленгов, удовлетворяющих этому условию. В седьмом вычислителе 10 определяется угловое отклонение контрольной точки от пеленга, после чего в третьем запоминающем устройстве 11 формируется массив, содержащий в каждой ячейке число пеленгов (по результатам выполнения условий седьмого вычислителя 10) соответствующее контрольной точке.В восьмом вычислителе 12, ячейки массива, сформированные в третьем запоминающем устройстве 11, ранжируют в порядке убывания числа пеленгов, проходящих вблизи соответствующей контрольной точки, и в левой части этого ранжированного ряда, содержащей ячейки с числами , бóльшими некоторого минимального числа  , выбирают, начиная с первой ячейки,
, выбирают, начиная с первой ячейки,  ячеек локальных максимумов, то есть ячеек с такими индексами
ячеек локальных максимумов, то есть ячеек с такими индексами  и
и  , что во всех восьми смежных по этим индексам ячейках содержатся числа, меньшие, чем
, что во всех восьми смежных по этим индексам ячейках содержатся числа, меньшие, чем  . Координаты контрольных точек, соответствующих этим ячейкам, принимают за начальное приближение координат ИРИ. Далее в девятом вычислителе 13 определяют по формуле 10 начальное приближение вероятностей обнаружения -го ИРИ
. Координаты контрольных точек, соответствующих этим ячейкам, принимают за начальное приближение координат ИРИ. Далее в девятом вычислителе 13 определяют по формуле 10 начальное приближение вероятностей обнаружения -го ИРИ  . Полученные начальные приближения координат и вероятностей обнаружения ИРИ запоминают в четвертом запоминающем устройстве 14. В десятом вычислителе 15 уточняют оценки координат и вероятностей с помощью итерационной процедуры по методу максимального правдоподобия.
. Полученные начальные приближения координат и вероятностей обнаружения ИРИ запоминают в четвертом запоминающем устройстве 14. В десятом вычислителе 15 уточняют оценки координат и вероятностей с помощью итерационной процедуры по методу максимального правдоподобия.
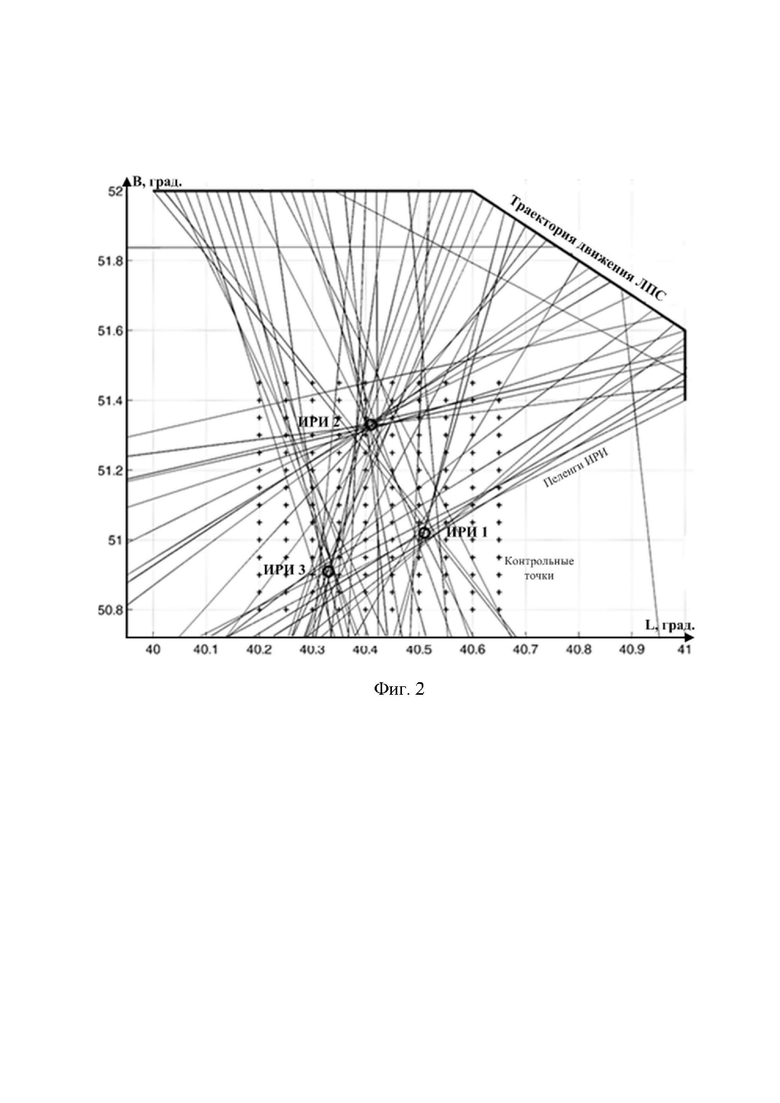
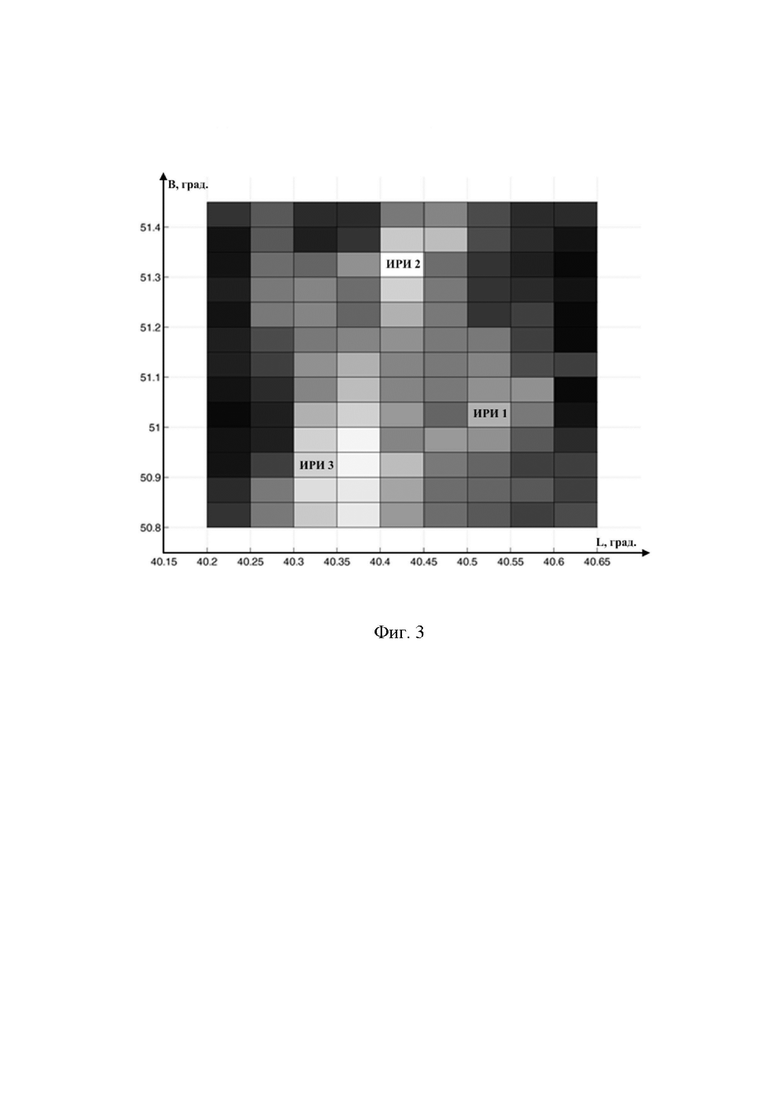
Результаты моделирования предлагаемого способа. Моделирование предлагаемого способа определения географических координат ИРИ в многоцелевой обстановке проведено в среде Matlab. На фиг.2 представлены результаты многократного пеленгования ИРИ с борта ЛПС, движущегося по назначенной траектории, отображенной жирной ломаной линией. Координаты источников радиоизлучения: ИРИ 1 - 51.02 с.ш., 40.51 в.д., ИРИ 2 - 51.33 с.ш., 40.41 в.д., ИРИ 3 - 50.91 с.ш., 40.33 в.д. - отображены кружками. Количество измеренных пеленгов на траектории ЛПС - 61. Для повышения быстродействия и надежности в имитационную модель не включены рутинные операции преобразования измеренных пеленгов из связанной системы координат пеленгатора в географическую систему координат.При моделировании в каждый момент пеленгования по псевдослучайному закону с заданными вероятностями работает только один из трех искомых ИРИ либо ошибочно запеленгованный случайный ИРИ. В данной реализации модели вероятность пеленгования каждого из искомых ИРИ задана 0,3, вероятность пеленгования постороннего ИРИ - 0,1. Истинный пеленг для каждого из искомых ИРИ из соответствующей точки пеленгования определялся решением обратной геодезической задачи на шаре между этими точками [Морозов В.П. Курс сфероидической геодезии. Изд. 2, перераб. и доп.М., Недра, 1979, 296 с.]. Далее к нему добавлялась результирующая случайная ошибка пеленгования, включающая ошибки бортового пеленгатора и ошибки измерения ориентации ЛПС, подчиняющаяся центрированному нормальному закону с СКО 1 градус. При пеленговании постороннего ИРИ пеленг считался равномерно распределенным, в круговом секторе [0°…360°). «Измеренные» таким образом пеленги изображены на фиг. 2 в виде ортодромий тонкими линиями. На фиг. 3 представлена зона поиска ИРИ в увеличенном масштабе. Градациями серого отображается количество пеленгов, отклоняющихся от каждой контрольной точки не более чем на удвоенную СКО пеленгования, т.е. на 2 град. На графике видны 3 области локальных максимумов этой функции, соответствующих истинным координатам трех ИРИ. На фиг. 4 отображены в увеличенном масштабе результаты функционирования имитационной модели. Отмеченные большими прямыми крестами контрольные точки зоны поиска выбраны в качестве начального приближения оценки координат ИРИ. Оценки координат ИРИ, полученные методом минимизации функции правдоподобия, взятой с обратным знаком, [Гилл Ф., Мюррей У., Райт М. Практическая оптимизация. Пер с англ. - М.: Мир, 1985.-509 с., ил.] отмечены косыми крестами.
Результаты моделирования способа определения координат ИРИ представлены в табл. 1.
Таблица 1 - Результаты определения координат ИРИ.
оценивания
Из таблицы, а также из фиг. 4 видно, что предлагаемый способ позволяет повысить точность местоопределения ИРИ и, кроме того, оценить сравнительную интенсивность их работы.
Достигаемый технический результат - повышение точности и достоверности определения географических координат источников радиоизлучения при одновременном снижении вычислительных затрат, возможность сравнительной оценки интенсивности работы обнаруженных ИРИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| Способ повышения точности и достоверности пеленгования при накоплении спектральных компонент сигналов источников радиоизлучения | 2019 |
|
RU2696094C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |

Изобретение относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения (ИРИ), и может быть использовано в навигационных, пеленгационных, локационных средствах для определения координат ИРИ с летно-подъемного средства (ЛПС), в частности с беспилотного ЛПС. Технический результат - повышение точности и достоверности определения географических координат источников радиоизлучения с сокращением временных затрат, снижение вероятности появления ложных ИРИ, обеспечение возможности сравнительной оценки интенсивности работы обнаруженных ИРИ. Заявленный способ обеспечивает снижение вычислительных затрат за счет выполнения основных расчетов в географической системе координат с минимальным количеством обращений к тригонометрическим функциям при полном исключении использования геоцентрических координат. Предлагаемый алгоритм поиска локальных контрольных точек, в окрестностях которых проходит максимальное число измеренных пеленгов, позволяет корректно оценить число локальных максимумов функции правдоподобия в зоне поиска и снизить вероятность появления ложных ИРИ. Кроме того, максимизация функции правдоподобия в многомерном пространстве координат и вероятностей обнаружения ИРИ позволяет с максимальной точностью определить координаты нескольких обнаруженных за время наблюдения неразличимых по параметрам сигнала ИРИ, а также получить сравнительную оценку интенсивности их работы. 4 ил., 1 табл.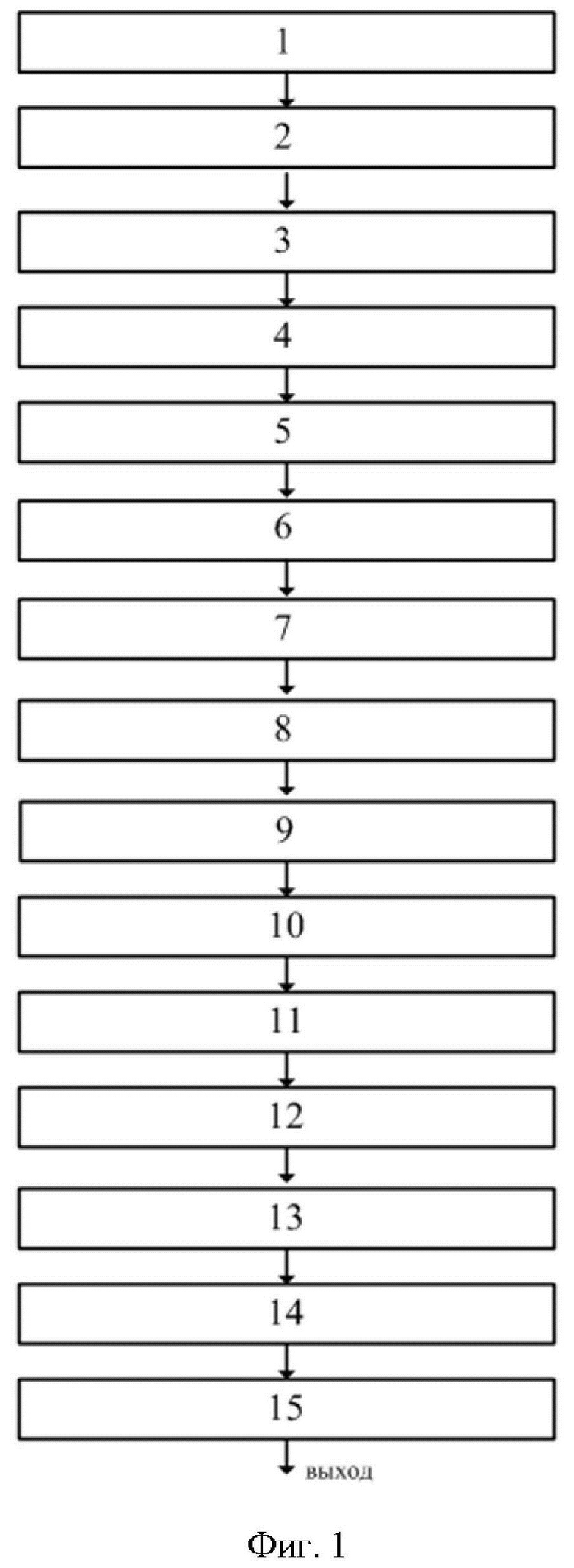
Способ определения географических координат источников радиоизлучения (ИРИ) в многоцелевой обстановке, заключающийся в том, что принимают сигналы ИРИ в заданной полосе частот перемещающимся в пространстве бортовым радиопеленгатором, установленным на летно-подъемном средстве (ЛПС), измеряют пространственно-информационные параметры обнаруженных сигналов: азимут (пеленг) и угол места в сферической системе координат, связанной с антенной системой радиопеленгатора, – с одновременным определением географических координат местоположения ЛПС и параметров его пространственной ориентации, углов Эйлера, относительно нормальной земной левосторонней системы координат в этой точке в момент времени ti, вектор направления на ИРИ представляют в виде тройки направляющих косинусов в декартовой системе координат, связанной с антенной системой, и преобразуют в упомянутую нормальную земную систему координат путем последовательного умножения на две матрицы поворота: из системы координат антенной системы в систему координат ЛПС с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно строительных осей ЛПС и из системы координат ЛПС в нормальную земную систему координат с учетом измеренных в момент времени ti пространственных углов ЛПС: курса, тангажа и крена, определяют значение азимута  на ИРИ, расположенный на поверхности «круглой» Земли, в географической системе координат в момент времени ti, и запоминают его совместно с географическими координатами ЛПС в момент времени ti, дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ, разделяют зону поиска на
на ИРИ, расположенный на поверхности «круглой» Земли, в географической системе координат в момент времени ti, и запоминают его совместно с географическими координатами ЛПС в момент времени ti, дополнительно на подготовительном этапе задают в географических координатах границы зоны поиска ИРИ, разделяют зону поиска на  локальных зон, размеры которых определяются априорно с известной точностью пеленгования центра локальной зоны из всех точек траектории ЛПС, например по уровню
локальных зон, размеры которых определяются априорно с известной точностью пеленгования центра локальной зоны из всех точек траектории ЛПС, например по уровню  , определяют географические координаты
, определяют географические координаты 
 контрольных точек – геометрических центров локальных зон, а в процессе работы подсчитывают для каждой контрольной точки количество измеренных пеленгов, отклоняющихся от этой точки на угол не более
контрольных точек – геометрических центров локальных зон, а в процессе работы подсчитывают для каждой контрольной точки количество измеренных пеленгов, отклоняющихся от этой точки на угол не более  , отличающийся тем, что на полученном таким образом распределении измеренных пеленгов по контрольным точкам выделяют локальные максимумы, координаты контрольных точек, соответствующих положениям этих максимумов, при условии, что число пеленгов в максимуме не превышает заданного порога, принимают за начальное приближение координат ИРИ
, отличающийся тем, что на полученном таким образом распределении измеренных пеленгов по контрольным точкам выделяют локальные максимумы, координаты контрольных точек, соответствующих положениям этих максимумов, при условии, что число пеленгов в максимуме не превышает заданного порога, принимают за начальное приближение координат ИРИ 
 , а величину
, а величину
– за начальное приближение вероятности  выхода в эфир данного ИРИ, где
выхода в эфир данного ИРИ, где  – число пеленгов, проходящих вблизи m-й контрольной точки, m=1…M;
– число пеленгов, проходящих вблизи m-й контрольной точки, m=1…M;  – априорная вероятность того, что среди всех измеренных пеленгов присутствуют пеленги, не принадлежащие ни одному из
– априорная вероятность того, что среди всех измеренных пеленгов присутствуют пеленги, не принадлежащие ни одному из  ИРИ;
ИРИ;
для начального приближения вычисляют функцию правдоподобия по формуле
 ,
,
а также компоненты градиента функции правдоподобия по формулам
 ,
,
 ,
,
 ,
,
где  – измеренный пеленг с
– измеренный пеленг с  -й позиции пеленгатора,
-й позиции пеленгатора,  – истинное значение пеленга с
– истинное значение пеленга с  -й позиции пеленгатора в текущее
-й позиции пеленгатора в текущее  -е приближение позиции
-е приближение позиции  -го ИРИ, в ходе итерационной процедуры, варьируя значения координат
-го ИРИ, в ходе итерационной процедуры, варьируя значения координат  и вероятностей
и вероятностей  выхода в эфир всех ИРИ (
выхода в эфир всех ИРИ ( ,
,  – номер итерации), находят глобальный максимум функции правдоподобия, значения координат и вероятностей, полученные в последней итерации, принимают за соответствующие параметры обнаруженных ИРИ.
– номер итерации), находят глобальный максимум функции правдоподобия, значения координат и вероятностей, полученные в последней итерации, принимают за соответствующие параметры обнаруженных ИРИ.
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| KR 20110125803 A, 22.11.2011 | |||
| CN 104076348 A, 01.10.2014 | |||
| CN 105738887 A, 06.07.2016. | |||

