Изобретение относится к испытательной технике, используемой при наземной экспериментальной отработке для компенсации веса (обезвешивания, имитации невесомости) однозвенных прецизионных раскрываемых конструкций космического аппарата, например, рефлекторов антенн, которые в процессе проверки функционирования из транспортировочного в рабочие положения совершают вращение вокруг одной или более осей, пересекающихся в одной точке.
Известен стенд раскрытия панелей солнечной батареи (патент RU 2567678 C1, B64G7/00). Стенд состоит из фермы, неподвижно установленной и закрепленной на полу помещения, на этой ферме шарнирно установлена технологическая рама с балансировочным грузом, при этом вал вращения технологической рамы установлен соосно с валом вращения панели батареи солнечной, а балансировочный груз установлен так, чтобы центр масс сборки «технологическая рама + панель батареи солнечной без подкосов» совпадает с осью вращения технологической рамы. Стенд содержит ферменную опору, на которой закреплено обезвешивающее устройство, и переходную раму под имитатор космического аппарата. В верхней части опоры установлен кронштейн, горизонтально перемещаемый по направляющим, а в нижней части опоры регулируемые стойки. Устройство выполнено в виде отдельных шарнирных звеньев, причем кронштейн жестко соединен с первым звеном. Оси вращения звеньев соосны осям вращения соответствующих панелей батареи солнечной. Последнее обеспечивается перемещением вручную кронштейна по направляющим и его закреплением специальным винтом. В каждом звене закреплено по два демпфера с подвесками в виде стержней.
Недостатком указанного аналога является то, что данное устройство отслеживает вращение раскрываемых панелей только вокруг одной оси и может быть использовано только для обезвешивания объектов, перемещающихся в горизонтальной плоскости.
В качестве прототипа выбрано обезвешивающее устройство (заявка на изобретение RU № 98104331 A, G01M1/00). Обезвешивающее устройство выполнено в виде двуплечего рычага, шарнирно закрепленного в точке равновесия, на одном конце которого закреплен обезвешиваемый объект, а на другом уравновешивающий груз, плечи рычага выполнены раздвижными и кинематически связанными. Возможно снабжение устройства вертикальной осью вращения, установка в подвесе испытываемого объекта датчика ошибки разгружающей силы и гироскопического датчика отклонения подвеса от вертикали. Обезвешивающее устройство может содержать несколько двуплечих рычагов.
Недостатком выбранного в качестве прототипа обезвешивающего устройства является то, что оно имеет только одну вертикальную ось вращения и может использоваться только для обезвешивания объектов, совершающих вращение вокруг одной оси. Так же устройство не содержит элементов для ориентации оси вращения вертикально, не имеет элементов для повышения жесткости и уменьшения деформаций двуплечего рычага под рабочей нагрузкой, не имеет элементов для точной настройки уравновешенного состояния двуплечего рычага относительно оси вращения под рабочей нагрузкой.
Наземная отработка космического аппарата, включающая проверку функционирования раскрываемых конструкций, должна проводиться в условиях, близких к условиям эксплуатации (невесомость), и обеспечивать все собственные степени свободы испытываемых конструкций, которые имеют малую жесткость и прочность, а приводы раскрывающихся элементов обладают минимальной необходимой мощностью. Эти условия не позволяют производить экспериментальную отработку в поле действия силы тяжести без применения систем обезвешивания.
Задачами изобретения являются: расширение функциональных возможностей (возможности обезвешивания раскрываемых конструкций, совершающих вращение вокруг нескольких осей) и повышение эксплуатационных характеристик (повышение жесткости разработанного устройства, уменьшение деформаций в процессе эксплуатации, возможность точной настройки уравновешенного состояния) устройства для обезвешивания прецизионных раскрываемых конструкций космического аппарата.
Указанная задача достигается тем, что устройство для обезвешивания, выполненное в виде двуплечего рычага, шарнирно закрепленного в точке равновесия, на одном конце которого закреплен обезвешиваемый объект, а на другом уравновешивающий груз, снабженное шарнирным устройством с вертикальной осью вращения, подвижной в горизонтальной плоскости, датчиком определения разгружающей силы и отклонения подвеса от вертикали, при этом плечи рычага с обезвешиваемым объектом с собственными шарнирами и шарнирами подвеса образуют в вертикальной плоскости параллелограмм. При этом устройство в месте шарнирного закрепления двуплечего рычага помимо вертикальной оси, снабжено горизонтальной осью вращения, а также площадкой с четырьмя крепежными деталями, обеспечивающими точную настройку ориентации вертикальной оси вращения двуплечего рычага в пространстве, одним вертикальным и двумя горизонтальными упорными кронштейнами для закрепления на них металлической ленты, соединяющей упорные кронштейны с установленными на максимальном удалении от геометрического центра рычага хомутами, на которых в свою очередь установлены узлы для регулировки степени натяжения металлической ленты, повышающей общую жесткость и уменьшающей деформации двуплечего рычага во время эксплуатации, при чем два горизонтальных упорных кронштейна снабжены элементами оптического контроля (реперные знаки) для точного определения точки пересечения горизонтальной и вертикальной осей вращения двуплечего рычага, которая перед началом испытаний должна быть совмещена с вертикалью, проходящей через точку пересечения осей вращения обезвешиваемого объекта, вилкой для крепления вывески от обезвешиваемого объекта, перемещаемой вдоль продольной оси двуплечего рычага и имеющей ортогональную к продольной оси двуплечего рычага ось вращения, также снабженной элементами оптического контроля (реперными знаками) для точного определения центра вилки, который перед началом испытаний должен быть совмещен с вертикалью, проходящей через центр массы обезвешиваемого объекта, двумя перемещаемыми вдоль продольной оси рычага хомутами, снабженными резьбовыми отверстиями для установки шпилек меньшего диаметра с балансировочными грузами, предназначенными для перемещения общего центра массы устройства обезвешивания к точке пересечения вертикальной и горизонтальной осей вращения двуплечего рычага, что в свою очередь обеспечивает уравновешенное состояние двуплечего рычага при любом угловом положении в процессе эксплуатации, шпилькой большего диаметра с резьбой мелкого шага, установленной на продольной оси двуплечего рычага и предназначенной для крепления уравновешивающего груза и последующей точной регулировки его положения вдоль продольной оси двуплечего рычага, четырьмя контргайками для однозначной и жесткой фиксации положения уравновешивающего груза на шпильке большего диаметра и исключения его самопроизвольного перемещения в процессе монтажных и эксплуатационных работ.
Сущность изобретения поясняется чертежами, приведенными на шести фигурах.
Фиг. 1 – общий вид устройства для обезвешивания прецизионных раскрываемых конструкций космического аппарата.
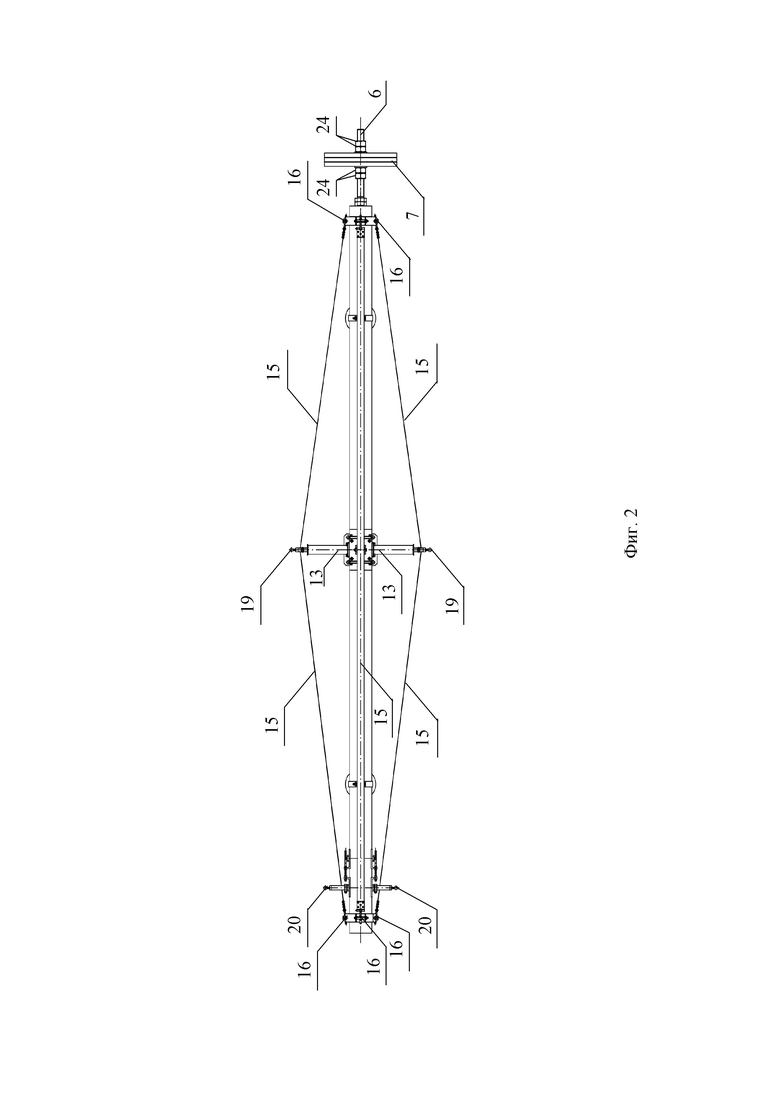
Фиг. 2 – вид сверху устройства для обезвешивания прецизионных раскрываемых конструкций космического аппарата.
Фиг. 3 – общий вид устройства для обезвешивания прецизионных раскрываемых конструкций космического аппарата с обезвешиваемым объектом.
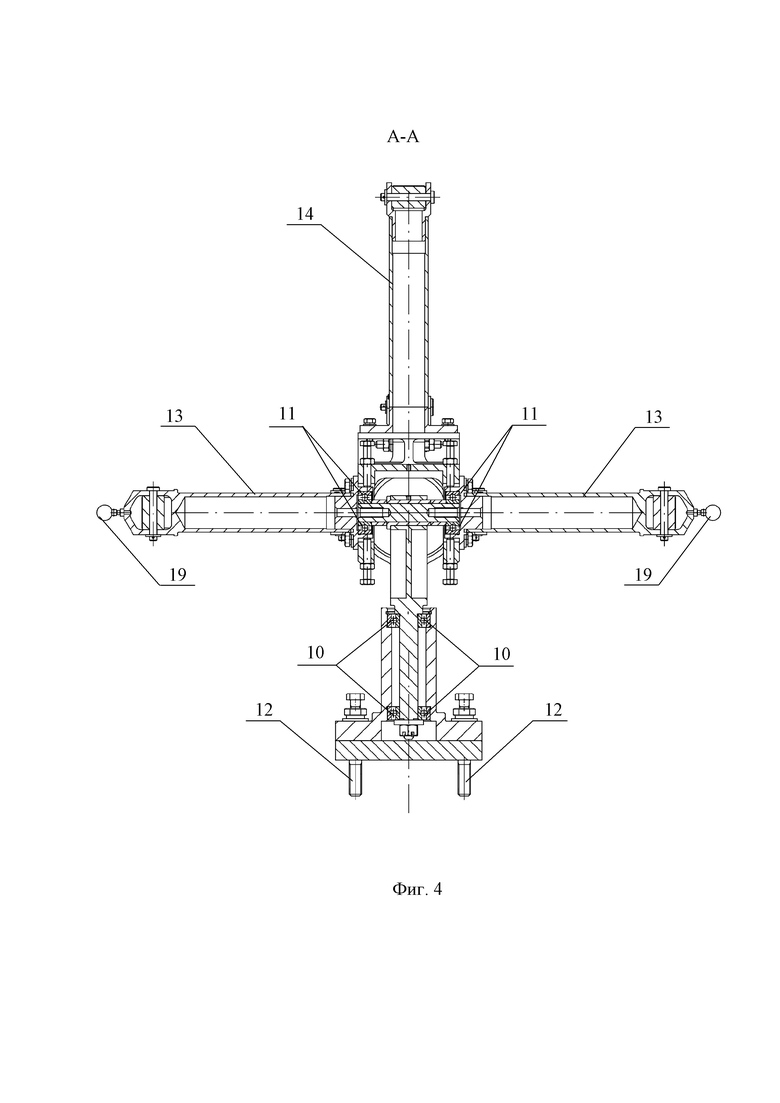
Фиг. 4 – разрез А-А, показывающий расположение осей вращения устройства в точке равновесия.
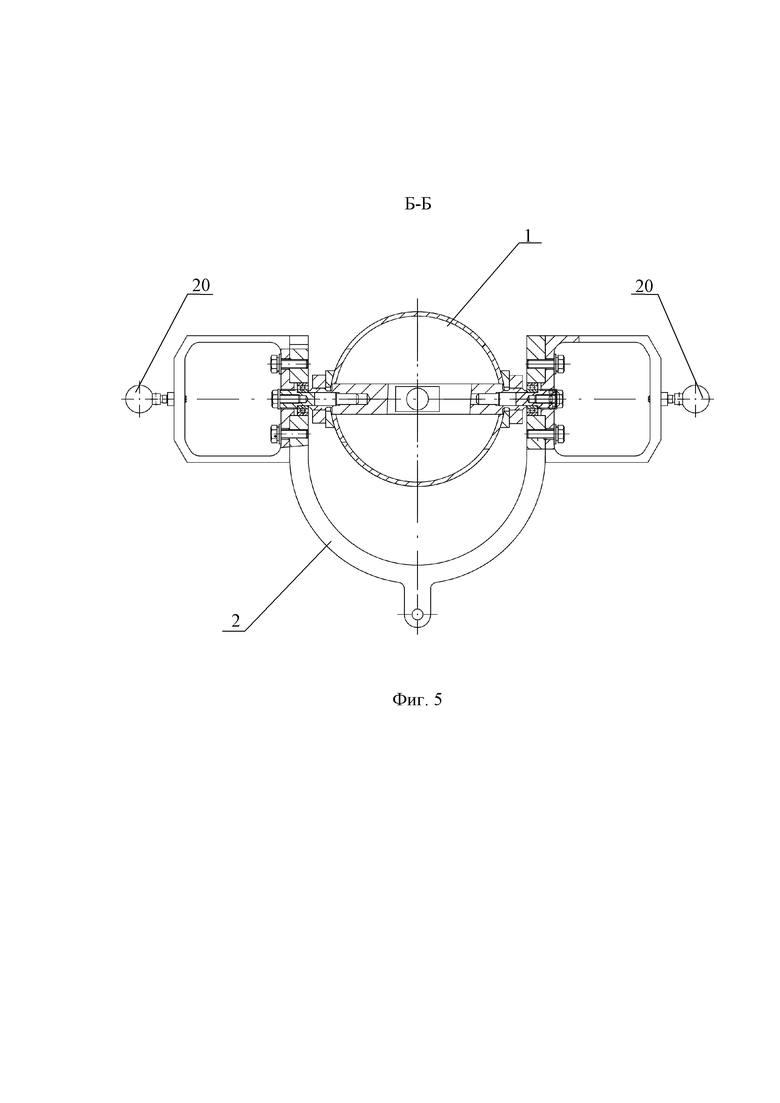
Фиг. 5 – разрез Б-Б, показывающий хомут с балансировочным грузом.
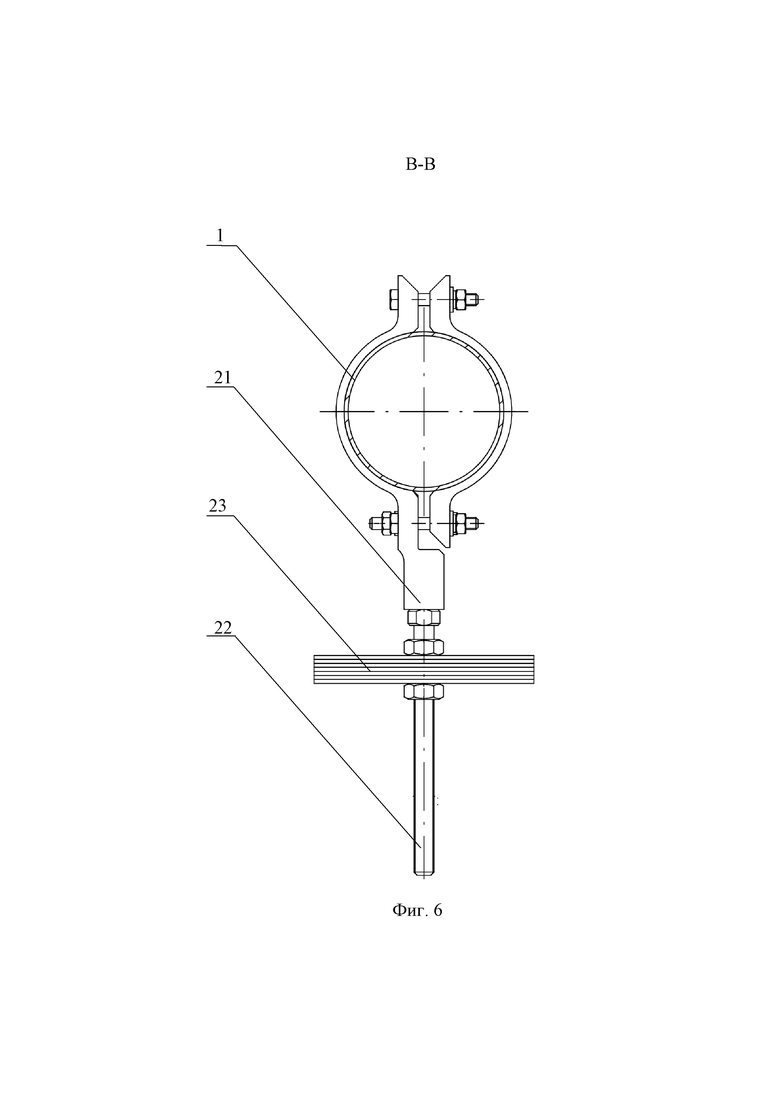
Фиг. 6 – разрез В-В, показывающий вилку для крепления подвеса обезвешиваемого объекта.
Устройство для обезвешивания прецизионных раскрываемых конструкций космического аппарата состоит из двуплечего рычага 1, выполненного в форме тонкостенной трубы, вилки 2, оснащенной датчиком 3 ошибки разгружающей силы и отклонения подвеса 4 от вертикали, для крепления обезвешиваемого объекта 5 на одном конце двуплечего рычага 1 и шпилькой большего диаметра 6 с уравновешивающим грузом 7 на другом, шарнирного узла 8 на площадке 9 в точке равновесия двуплечего рычага 1 с подшипниковыми узлами 10 и 11, обеспечивающими вращение двуплечего рычага 1 вокруг вертикальной оси и горизонтальной оси. Вращением четырех крепежных элементов 12 обеспечивается точная ориентация вертикальной оси и горизонтальной оси в пространстве. С шарнирным узлом 8 соединены два горизонтальных 13 и один вертикальный 14 упорных кронштейна для закрепления на них металлической ленты 15, которая соединяет их с узлами 16 натяжения ленты, установленными на находящихся на равном расстоянии от геометрического центра двуплечего рычага 1 хомутах 17. На двух горизонтальных упорных кронштейнах 13 на равном расстоянии от точки пересечения 18 вертикальной и горизонтальной осей установлены элементы оптического контроля (реперные знаки) 19.
На крайних точках вилки 2 на равном расстоянии от продольной оси двуплечего рычага 1 установлены элементы оптического контроля (реперные знаки) 20, также на вилке 2 установлен подвес 4 с датчиком 3 ошибки разгружающей силы для крепления подвеса обезвешиваемого объекта 5.
На трубе двуплечего рычага 1 на равном расстоянии от точки пересечения 18 вертикальной и горизонтальной осей установлены два хомута 21, в которых установлены резьбовые шпильки меньшего диаметра 22 с балансировочными грузами 23.
На шпильке большего диаметра 6 с обеих сторон от уравновешивающего груза 7 установлены по две контргайки 24.
Предлагаемое устройство для обезвешивания прецизионных раскрываемых конструкций космического аппарата работает следующим образом: двуплечий рычаг 1 с использованием площадки 9 устанавливается так, чтобы точка пересечения 18 вертикальной и горизонтальной осей шарнирного узла 8 находилась на одной вертикали с точкой пересечения осей вращения обезвешиваемого объекта 5 и, вращением крепежных элементов 12, вертикальная и горизонтальная оси шарнирного узла 8 точно ориентируются в пространстве. Металлическая лента 15 приводится в натяжение с использованием узлов 16 натяжения ленты, расположенных на хомутах 17. К вилке 2 при помощи подвеса 4 с датчиком 3 ошибки разгружающей силы крепится обезвешиваемый объект 5, на другом конце двуплечего рычага 1 на шпильку большего диаметра 6 устанавливается уравновешивающий груз 7, также производят крепление двух хомутов 21 на равном расстоянии от точки пересечения осей 18 и установку балансировочных грузов 23 на шпильки меньшего диаметра 22. Перемещением уравновешивающего груза 7 вдоль шпильки большего диаметра 6 и перемещением балансировочных грузов 23 вдоль шпилек меньшего диаметра 22 добиваются перемещения общего центра массы двуплечего рычага 1 с подвешенным обезвешиваемым объектом 5 к точки пересечения осей 18 и, как следствие, уравновешенного состояния двуплечего рычага 1 относительно обозначенной точки 18.
В процессе подготовки устройства к работе с использованием элементов оптического контроля 19 и 20 контролируют равенство сторон H и L параллелограмма, вершинами которого являются точка пересечения 18 вертикальной и горизонтальной осей шарнирного узла 8 двуплечего рычага 1, центр вилки 2, центр массы обезвешиваемого объекта 1 и точкой пересечения осей вращения обезвешиваемого объекта 5.
Наличие горизонтальной оси в дополнение к вертикальной оси обеспечивает возможность обезвешивания прецизионных раскрываемых конструкций совершающих вращение вокруг одной и более осей, что значительно повышает область применения предлагаемого обезвешивающего устройства.
Использование металлической ленты 15 с узлами 16 натяжения ленты позволяет значительно увеличить общую жесткость конструкции двуплечего рычага и уменьшить его деформации при эксплуатации.
Возможность перемещения вилки 2 вдоль продольной оси двуплечего рычага 1 обеспечивает универсальность обезвешивающего устройства и дает возможность точной настройки под каждый новый обезвешиваемый объект.
Наличие элементов оптического контроля (реперных знаков) 19 и 20 обеспечивает возможность точного контроля положения в пространстве точки пересечения осей 18 и точки пересечения оси вращения вилки 2 с продольной осью двуплечего рычага 1, что повышает точность обезвешивания и качество наземной экспериментальной отработки прецизионных раскрываемых конструкций в целом.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность проводить более качественную наземную экспериментальную отработку широкого перечня раскрываемых механических систем космического аппарата, в том числе рефлекторов или штанг антенн, которые в процессе проверки функционирования из транспортировочного в рабочее положение совершают вращение относительно одной или более осей, пересекающихся в одной точке.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| СИСТЕМА ОБЕЗВЕШИВАНИЯ | 2018 |
|
RU2697632C1 |
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| ТРАВЕРСА | 2017 |
|
RU2703861C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
| Установка для проведения испытаний крупногабаритных солнечных батарей | 1991 |
|
SU1803351A1 |
| СТЕНД РАСКРЫТИЯ ПАНЕЛЕЙ СОЛНЕЧНОЙ БАТАРЕИ | 2011 |
|
RU2483991C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2221995C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ВЕРТИКАЛЬНО ПЕРЕМЕШАЮЩЕЙСЯ МАЛОЖЕСТКОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2004 |
|
RU2273592C2 |


Изобретение относится к испытательной технике, а более конкретно к испытаниям прецизионных раскрываемых конструкций космического аппарата. Устройство для обезвешивания прецизионных раскрываемых конструкций космического аппарата содержит двуплечий рычаг, на одном конце которого закреплен обезвешиваемый объект, а на другом уравновешивающий груз. Двуплечий рычаг снабжен шарнирным устройством с горизонтальной и вертикальной осями вращения. Имеется датчик определения разгружающей силы и металлическая лента с узлами ее натяжения. Настройка уравновешенного состояния двуплечего рычага относительно точки пересечения горизонтальной и вертикальной осей шарнирного устройства обеспечивается хомутами с резьбовыми шпильками, балансировочными грузами. Наличие элементов оптического контроля - реперных знаков, обеспечивает точное определение положения в пространстве точки пересечения горизонтальной и вертикальной осей шарнирного устройства двуплечего рычага и точки, являющейся центром вилки для крепления подвеса. Достигается повышение точности. 6 ил.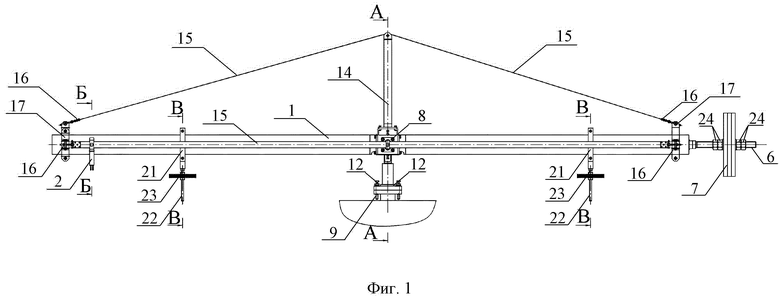
Устройство для обезвешивания прецизионных раскрываемых конструкций космического аппарата, состоящее из двуплечего рычага, шарнирно закрепленного в точке равновесия, на одном конце которого закреплен обезвешиваемый объект, а на другом уравновешивающий груз, снабженное шарнирным устройством с вертикальной осью вращения, подвижной в горизонтальной плоскости, датчиком определения разгружающей силы и отклонения подвеса от вертикали, при этом плечи рычага с обезвешиваемым объектом с собственными шарнирами и шарнирами подвеса образуют в вертикальной плоскости параллелограмм, отличающееся тем, что устройство в месте шарнирного закрепления двуплечего рычага помимо вертикальной оси снабжено горизонтальной осью вращения, а также площадкой с четырьмя крепежными деталями, одним вертикальным и двумя горизонтальными упорными кронштейнами для закрепления на них металлической ленты, соединяющей упорные кронштейны с установленными на максимальном удалении от геометрического центра рычага хомутами, на которых в свою очередь установлены узлы для регулировки степени натяжения металлической ленты, причем два горизонтальных упорных кронштейна снабжены элементами оптического контроля – реперными знаками, вилкой для крепления вывески от обезвешиваемого объекта, перемещаемой вдоль продольной оси двуплечего рычага и имеющей ортогональную к продольной оси двуплечего рычага ось вращения, также снабженной элементами оптического контроля – реперными знаками, двумя перемещаемыми вдоль продольной оси рычага хомутами, снабженными резьбовыми отверстиями для установки шпилек меньшего диаметра с балансировочными грузами, шпилькой большего диаметра с резьбой мелкого шага, установленной на продольной оси двуплечего рычага, четырьмя контргайками.
| Л ЯАТЕНШ-ТЕтчЕа-Ая '^^и, К»'5.7ИГ'Т1Кл | 0 |
|
SU172067A1 |
| US 5110294 A1, 05.05.1992 | |||
| US 3161968 A1, 22.12.1964 | |||
| RU 98104331 A, 10.01.2000. | |||

