Предлагаемое изобретение относится к устройствам для обезвешивания механических систем при испытаниях на их раскрытие, а более конкретно для обезвешивания вертикально перемещающихся маложестких механических систем космических аппаратов при проведении их испытаний на функционирование в процессе наземной подготовки.
Известно устройство для обезвешивания горизонтально перемещающихся механических систем космических аппаратов, содержащее закрепленную на полу либо на потолке сооружения опорную раму, в горизонтальной направляющей которой установлена подвижная каретка, связанная тросом, снабженным регулятором натяжения, с маложесткой механической системой космического аппарата, снабженной фиксирующим замком и установленной с возможностью ее горизонтального перемещения (см., например, К.С.Колесников "Динамика разделения ступеней летательных аппаратов", Москва, "Машиностроение", 1977 г., стр. 211-212).
Недостатком данного устройства является необходимость кантования (в составе наземного оборудования должен быть кантователь) космического аппарата в горизонтальное положение для проведения испытаний на раскрытие его механических систем.
Известно также устройство для обезвешивания вертикально перемещающихся маложестких механических систем космических аппаратов, содержащее противовес, связанный тросом, проходящим через блоки, установленные на закрепленной на полу сооружения опорной стойке, с маложесткой механической системой космического аппарата, снабженной фиксирующим замком и установленной с возможностью ее вертикального перемещения (см., например, Беляков И.Т. и др. "Технология сборки и испытаний космических аппаратов", Москва, "Машиностроение", 1990 г., стр. 143-144).
Недостатком данного устройства является сложность обеспечения вертикального натяжения (расположения) участка троса от точки его крепления к обезвешиваемой (по оси перемещения) механической системе космического аппарата до точки его контакта с блоком из-за неточностей (погрешностей) взаимного расположения космического аппарата и опорной стойки. На практике весьма сложно обеспечить требуемое взаимное расположение космического аппарата и опорной стойки. При этом допуск на точность установки складывается не только из погрешностей изготовления элементов системы, но также из допуска на установку опорной стойки, допуска на установку космического аппарата. Тем самым усилие натяжения троса от действия противовеса будет не совпадать с вертикальной осью перемещения обезвешиваемой механической системы космического аппарата, что приведет к воздействию на механическую систему космического аппарата определенного бокового усилия. Учитывая, что обезвешиваемая механическая система является маложесткой, это может вызвать ее разрушение или возникновение в ней недопустимых деформаций. Примером обезвешиваемой маложесткой механической системы может служить выдвижная штанга гравитационного устройства, представляющая собой металлический штырь, выполненный из ленты малой толщины.
Кроме того, данное устройство не позволяет регулировать его габаритные размеры в горизонтальном направлении, поэтому при подготовке космических аппаратов других типоразмеров требуется либо установка технологической подставки (для космического аппарата) в определенное положение относительно опорной стойки, либо изготовление нового устройства с соответствующими размерами.
Невозможность регулировки габаритных размеров данного устройства в вертикальном направлении приводит к неэффективному использованию объема помещения подготовки космических аппаратов.
Таким образом, при проектировании новых космических аппаратов и разработке технологических процессов их подготовки приходится ориентироваться на возможности существующего в помещении устройства для обезвешивания вертикально перемещающихся маложестких механических систем либо изготавливать и устанавливать устройство другого типоразмера.
Задачей (целью) предлагаемого изобретения являются повышение эксплуатационных характеристик (снижение возмущающего бокового усилия на обезвешиваемую маложесткую механическую систему космического аппарата, перемещающуюся в вертикальном направлении, при проведении ее испытаний на раскрытие) и расширение функциональных возможностей (использование универсальной конструкции устройства обезвешивания при проведения испытаний космических аппаратов различных типоразмеров) устройства обезвешивания вертикально перемещающихся маложестких механических систем космических аппаратов.
Поставленная задача (цель) достигается тем, что в устройстве для обезвешивания вертикально перемещающихся маложестких механических систем космических аппаратов, содержащем противовес, связанный тросом, проходящим через установленные на опорной стойке блоки, с маложесткой механической системой космического аппарата, снабженной фиксирующим замком и установленной с возможностью ее вертикального перемещения, опорная стойка закрепляется на космическом аппарате и снабжается приемной площадкой, устанавливаемой с возможностью взаимодействия с ней противовеса. На приемной площадке со стороны противовеса закрепляется амортизирующая подкладка, выполненная, например, из резины. Опорная стойка выполняется состоящей из приемного рычага, несущего угольника и фиксирующего кронштейна, закрепленного на космическом аппарате. Приемный рычаг и несущий угольник связываются между собой горизонтальной регулируемой вставкой. Несущий угольник и фиксирующий кронштейн связываются между собой вертикальной регулируемой вставкой. Блоки шарнирно устанавливаются на приемном рычаге и несущем угольнике. Приемная площадка закрепляется на фиксирующем кронштейне. Трос выполняется в виде ленты с нанесенной на ее поверхность размерной линейкой и наматывается на приемную катушку, шарнирно закрепленную на противовесе (в его верхней части) и снабженную фиксатором.
Предлагаемое устройство поясняется на фиг.1-6.
На фиг.1 представлен общий вид устройства перед началом вертикального перемещения обезвешиваемой маложесткой механической системы космического аппарата.
На фиг.2 показан общий вид устройства после завершения вертикального перемещения обезвешиваемой маложесткой механической системы космического аппарата.
На фиг.3 изображен вид А согласно фиг.1.
На фиг.4 представлен вид Б согласно фиг.1.
На фиг.5 показан выносной элемент I согласно фиг.1.
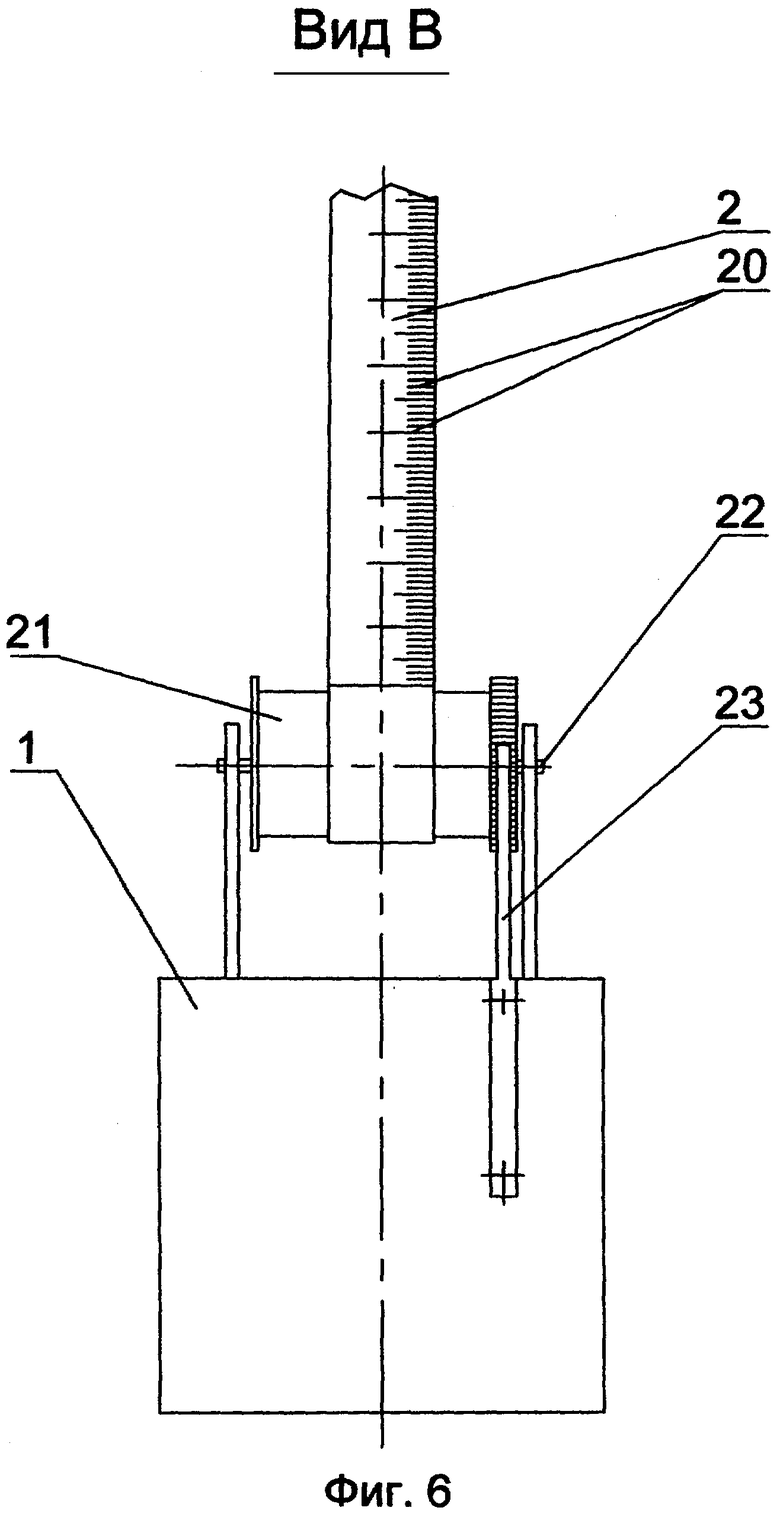
На фиг.6 представлен вид В согласно фиг.5.
Предлагаемое устройство содержит противовес 1 (фиг.1), связанный тросом 2, проходящим через установленные на опорной стойке 3 блоки 4 и 5, с маложесткой механической системой 6, установленной на космическом аппарате 7 с возможностью ее вертикального перемещения и удерживаемой на нем фиксирующим замком 8. Опорная стойка 3 установлена на космическом аппарате 7 и снабжена приемной площадкой 9 (фиг.1), установленной с возможностью взаимодействия с ней противовеса 1. На приемной площадке 9 со стороны противовеса 1 закреплена (приклеена) амортизирующая подкладка 10 (фиг.1). Опорная стойка 3 состоит из приемного рычага 11 (фиг.2), несущего угольника 12 и фиксирующего кронштейна 13, закрепленного посредством элементов крепления 14 на космическом аппарате 7. Приемный рычаг 11 и несущий угольник 12 жестко связаны между собой горизонтальной регулируемой вставкой 15 (фиг.2, 4). Несущий угольник 12 и фиксирующий кронштейн 13 жестко связаны между собой вертикальной регулируемой вставкой 16 (фиг.2, 3). Блоки 4 и 5 посредством шарниров 17 (фиг.2) и 18 установлены соответственно на приемном рычаге 11 и несущем угольнике 12. Приемная площадка 9 посредством элементов крепления 19 (фиг.2) закреплена на фиксирующем кронштейне 13. Трос 2 выполнен в виде ленты с нанесенной на ее поверхность размерной линейкой 20 (фиг.6) и намотан на приемную катушку 21, закрепленную посредством шарнира 22 на противовесе 1 и снабженную фиксатором 23 (фиг.5).
Предлагаемое устройство функционирует следующим образом.
Космический аппарат 7 краном (условно не показан) устанавливается на технологическую подставку 24 (фиг.1) и закрепляется к ней (не показаны). Производится настройка опорной стойки 3 под типоразмер конкретного космического аппарата 7. Настройка заключается в установке требуемого вертикального и горизонтального размеров опорной стойки 3 путем изменения длин вертикальной 16 и горизонтальной 15 регулируемых вставок с помощью фиксаторов 25 и 26, контактирующих с пазами 27 и 28 соответственно. Отводится фиксатор 23. Трос 2, выполненный в виде ленты, сматывается (наматывается) с приемной катушки 21, установленной на противовесе 1, до достижения им длины, требуемой при испытаниях механической системы 6 конкретного космического аппарата 7, после чего стопорится фиксатором 23. Длина размотанного участка троса 2 определяется визуально по размерной линейке 20, нанесенной на трос (ленту) 2, и выбирается из условия равенства перемещения (высоты подвеса) противовеса 1 до соприкосновения (контакта) с приемной площадкой 9 требуемому вертикальному перемещению испытуемой механической системы 6. Опорная стойка 3 закрепляется на космическом аппарате 7 посредством элементов крепления 14.
Следует отметить, что для крепления опорной стойки 3 в верхней части космического аппарата 7 выполняется специальная опорная площадка (не показана) с высокой точностью обработки поверхности под установку фиксирующего кронштейна 13. В отдельных случаях опорная стойка 3 может быть установлена на съемное технологическое оборудование, например, на транспортировочное кольцо (не показано), предварительно закрепленное на космическом аппарате 7 и используемое, например, для проведения подъемно-перегрузочных операций с космическим аппаратом 7.
Свободный конец троса (ленты) 2 крепится (не показаны) к обезвешиваемой маложесткой механической системе 6 космического аппарата 7 по продольной оси ее симметрии. Трос 2 укладывается на блоки 4 и 5, после чего противовес 1 находится в подвешенном положении (фиг.1) над приемной площадкой 9. Тем самым устройство подготовлено к проведению испытаний.
При срабатывании (открытии) фиксирующего замка 8 производится расчековка механической системы 6 космического аппарата 7. Механическая система 6 перемещается вверх (фиг.2). При этом противовес 1 перемещается вниз и в конечный момент раскрытия (вертикального перемещения) механической системы 6 космического аппарата 7 контактирует (фиг.2) с амортизирующей подкладкой 10, закрепленной на приемной площадке 9. Амортизирующая подкладка 10 снижает ударное воздействие на космический аппарат 7 в момент падения противовеса 1 на приемную площадку 9. Тем самым испытания механической системы 6 на раскрытие проведены.
Следует отметить, что так как опорная стойка 3 закреплена на космическом аппарате 7 и погрешность ее установки мала, то участок троса 2 от механической системы 6 до блока 4 практически вертикален (и совпадает с осью симметрии вертикально перемещающейся маложесткой механической системы 6). Это приводит к практическому отсутствию (в процессе проведения испытаний на функционирование механической системы 6) возмущающих боковых усилий (от противовеса 1), что исключает нештатное раскрытие маложесткой механической системы 6, а следовательно, и повреждение последней в процессе проведения испытаний. То есть раскрытие механической системы 6 в рабочее положение производится в условиях, максимально приближенных к условиям штатной эксплуатации в космическом пространстве.
После проведения испытаний на раскрытие механическая система 6 космического аппарата 7 приводится (вручную) в исходное положение (опускается) и стопорится фиксирующим замком 8. Трос 2 открепляется (не показаны) от механической системы 6 и совместно с противовесом 1 снимается с опорной стойки 3. Для компактности хранения трос 2 наматывается на предварительно расфиксированную приемную катушку 21. После этого приемная катушка 21 стопорится фиксатором 23. Демонтируются элементы крепления 14 и опорная стойка 3 снимается с космического аппарата 7. После этого проводится дальнейшая подготовка космического аппарата 7, а демонтированные элементы предлагаемого устройства обезвешивания (опорная стойка 3 с блоками 4 и 5 и противовес 1 с тросом 2) складируются на место их хранения.
Установка предлагаемого устройства непосредственно на космический аппарат позволяет более точно обезвесить испытуемую вертикально перемещающуюся маложесткую механическую систему космического аппарата вследствие уменьшения погрешности их взаимной установки. Тем самым исключается нештатное раскрытие маложесткой механической системы и уменьшается вероятность ее повреждения в процессе проведения стендовых испытаний космического аппарата при наземной отработке последнего.
Таким образом, предложенное устройство имеет существенные отличия от ранее известных устройств для обезвешивания вертикально перемещающихся маложестких механических систем космических аппаратов и позволяет улучшить их эксплуатационные характеристики (путем снижения возмущающего бокового усилия на обезвешиваемую маложесткую механическую систему космического аппарата, перемещающуюся в вертикальном направлении) и расширить их функциональные возможности (путем обеспечения возможности проведения одним устройством обезвешивания маложестких механических систем при различных типоразмерах испытуемых космических аппаратов).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2376217C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516880C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПЕРЕМЕЩЕНИЕМ ОБУЧАЕМОГО НА ТРЕНАЖЕРЕ ВЫХОДА В КОСМОС | 2007 |
|
RU2355039C1 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ СЕКЦИОННЫХ СКЛАДНЫХ ПАНЕЛЕЙ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2299840C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2018 |
|
RU2714283C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2293961C2 |




Изобретение относится к средствам наземных имитационных испытаний и подготовки к полету систем космического аппарата. Предлагаемое устройство содержит противовес, соединяемый тросом, проходящим через установленные на опорной стойке блоки, с испытываемой маложесткой механической системой. Данная система снабжена фиксирующим замком для ее удержания на космическом аппарате. При этом опорная стойка закреплена на космическом аппарате и снабжена приемной площадкой, установленной с возможностью взаимодействия с ней указанного противовеса. На приемной площадке со стороны противовеса закреплена амортизирующая подкладка. Технический результат изобретения состоит в уменьшении возмущающего бокового усилия на испытываемую маложесткую систему, а также в возможности применения одного устройства для обезвешивания аналогичных систем космических аппаратов при различных типоразмерах последних. 3 з.п. ф-лы, 6 ил.
| Технология сборки и испытаний космических аппаратов | |||
| Под общ | |||
| ред | |||
| проф | |||
| И.Т.Белякова и проф | |||
| И.А.Зернова | |||
| М.: Машиностроение | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |
| Исполнительный механизм имитатора пониженной гравитации | 1989 |
|
SU1722946A1 |
| US 5110294 A, 05.05.1992. | |||

