Группа изобретений относится к системам контроля с применением сенсорного оптического волокна и предназначено для передачи потоков информации по результатам постоянного мониторинга, в том числе и соблюдения ПДД (Правил дорожного движения) протяженного участка дороги с применением минимального количества видеокамер и радаров.
Известна система мониторинга по патенту РФ на изобретение №2516346, МПК G01D 5/353, опубл. 20.05.2014 г.
Эта система для мониторинга виброакустической характеристики протяженного объекта содержит непрерывный полупроводниковый лазер, оптический модулятор, предназначенный для формирования периодической последовательности прямоугольных импульсов длительностью в диапазоне от 50 нс до 500 нс и частотой следования от 200 Гц до 50 кГц, чувствительный элемент в виде волоконно-оптического кабеля, узел ввода оптического излучения в чувствительный элемент и вывода рассеянного излучения, фотоприемник, предназначенный для преобразования рассеянного оптического излучения в электрический сигнал, и узел обработки сигнала с процессором, при этом непрерывный полупроводниковый лазер снабжен брэгговским селективным отражателем с возможностью сужения полосы непрерывного излучения лазера до уровня менее 100 кГц, а оптический модулятор выполнен в виде акустооптического модулятора на бегущей акустической волне с возможностью формирования периодической последовательности прямоугольных импульсов с коэффициентом гашения K≥10×lg(T×f), где Т - длительность импульса, f - частота следования.
Недостатки: система не адаптирована конкретно для мониторинга дорог, не позволяет определять тип транспортного средства и нарушение им ПДД.
Известна система мониторинга протяженного объекта по патенту РФ на изобретение №2698097, МПК Н04В 10/25, опубл. 22.08.2019 г., прототип.
Эта система мониторинга дороги с применением сенсорного оптического волокна, содержит разделенные на участки сектора контроля безопасности, соединенные волоконно-оптическими линиями связи с центром управления охраной, ретрансляторы, датчики безопасности и видеокамеры с аккумуляторами, при этом центр управления охраной по радиоканалу соединен с ретрансляторами, а датчики безопасности и видеокамеры по оптическому кабелю для системы безопасности соединены с ретранслятором, канал кабельной канализации, в котором уложены оптические кабели, выполнен под поверхностью грунта.
Недостатки этой системы: невозможность постоянной диагностики состояния покрытия дороги и мониторинга дорожного движения.
Задачи создания изобретения: получение информации о состоянии дорожного покрытия и проведение мониторинга дорожного движения в режиме «он лайн».
Достигнутые технические результаты: получение информации о состоянии дорожного покрытия и проведение мониторинга дорожного движения в режиме «он лайн».
Решение указанных задач достигнуто в системе мониторинга состояния дороги и дорожного движения, содержащей центр управления дорожным движением, соединенный по линиям связи с блоками предварительной обработки, расположенными на каждом участке контроля и управления дорожным движением разделенной на участки дороги, вдоль которой расположен волоконно-оптический кабель, включающий сенсорное оптическое волокно, на каждом участке контроля и управления дорожным движением, на входе и на выходе его расположено, по меньшей мере, по одной видеокамере, соединенной с центром управления, при этом блок предварительной обработки содержит приемник, вход которого соединен с сенсорным оптическим волокном, а выход через последовательно соединенные усилитель и преобразователь соединен с процессором предварительной обработки сигнала с памятью, сигналы с которого поступают на передатчик сигналов в центр управления дорожным движением, тем, что волоконно-оптический кабель расположен на обочине дороги, разделенной на участки, при этом компьютер блока центра управления выполнен с возможностью распознавания типа субъекта или объекта, в том числе транспортного средства по принимаемому от блоков предварительной обработки сигналов путем сравнения принятого сигнала, несущего виброакустическую информацию с хранящимися в памяти компьютера эталонными виброакустическими сигналами, в результате чего определяют скорость и направление движения объектов или субъектов различного типа и выводят полученную информацию на плане местности о всех субъектах и объектах на монитор, при этом эталонные виброакустические сигналы получают за счет предварительной тарировки виброакустических сигналов, создаваемых разными субъектами и объектами, и наличия визуальных данных соответствующих субъектов и объектов.
Получение эталонных виброакустических сигналов может производиться в условиях нахождения эталонных объектов и субъектов с разной нагрузкой и в разных климатических условиях.
Линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением могут быть выполнены в виде волоконно-оптической линии связи, расположенной на воздушной линии электропередачи.
Линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением могут быть выполнены в виде волоконно-оптической связи, расположенной в подземной канализации,
Линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением могут быть выполнены посредством радиоканалов.
Решение указанных задач достигнуто в способе функционирования системы мониторинга состояния дороги и дорожного движения, включающем сбор виброакустических сигналов с сенсорного оптического волокна в компьютер центра управления дорожным движением и вывод информации на монитор, тем, что, по меньшей мере, одно сенсорное оптическое волокно расположено в волоконно-оптическом кабеле, проложенном вдоль обочины дороги, предварительно перед функционированием системы производят самообучение системы путем сбора эталонных виброакустических сигналов, возникающих в сенсорном оптическом волокне при проходе и проезде по дорожному покрытию разнообразных эталонных субъектов и объектов, измеряют виброакустический сигнал, запоминают его как эталонный и привязывают к конкретному изображению эталонного типа объекта или субъекта, полученному с видеокамеры, а в процессе функционирования системы измеряют виброакустический сигнал проходящих и проезжающих по дорожному покрытию разнообразных реальных субъектов и объектов, сравнивают его с эталонными сигналами и при совпадении выводят изображение этого субъекта или объекта на экран монитора под условным изображением в формате 2D анализируемой точки на плане дороги и перемещают условное изображение по дороге синхронно с перемещением реального субъекта или объекта по дороге.
Самообучение системы может быть произведено при условии нахождения эталонных объектов и субъектов с разными нагрузками и в различных климатических условиях.
В качестве объектов в базе данных могут быть размещены изображения транспортных средств различного вида и назначения, в том числе мотоциклов, тракторов и экскаваторов.
В качестве эталонных субъектов в базе данных могут быть размещены изображения людей, домашних животных и диких зверей.
Сущность изобретения поясняется на чертежах фиг. 1-10, где:
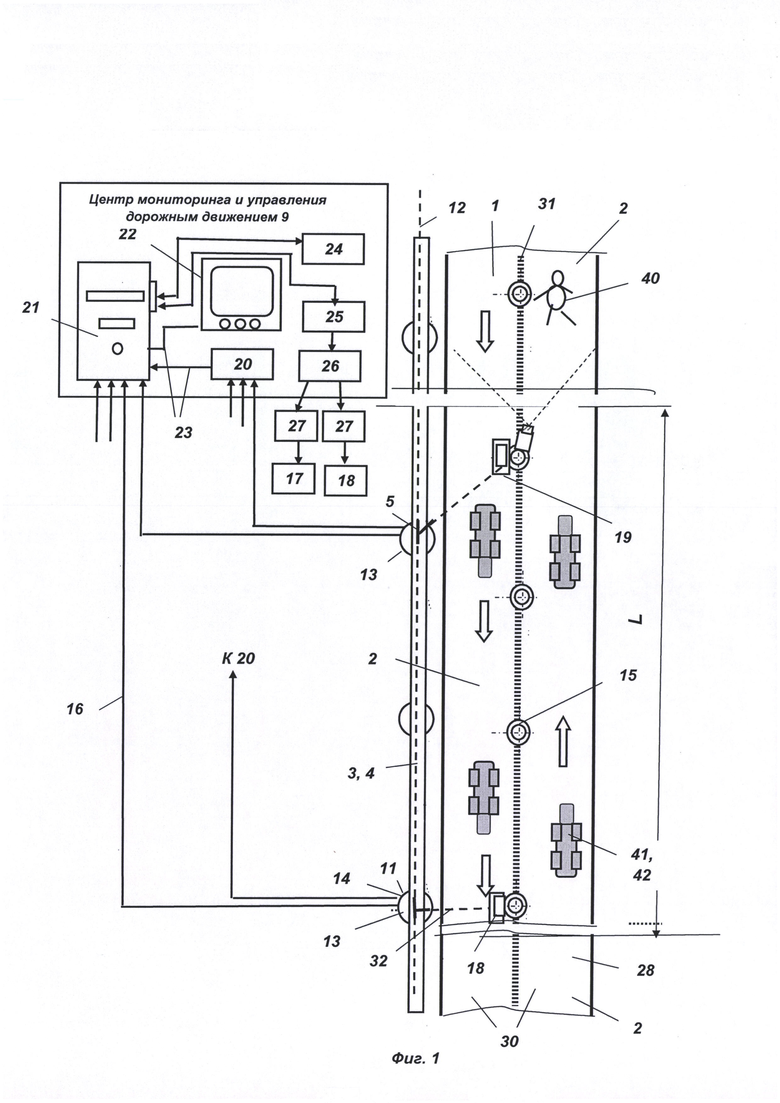
на фиг. 1 приведена принципиальная схема мониторинга участка дороги,
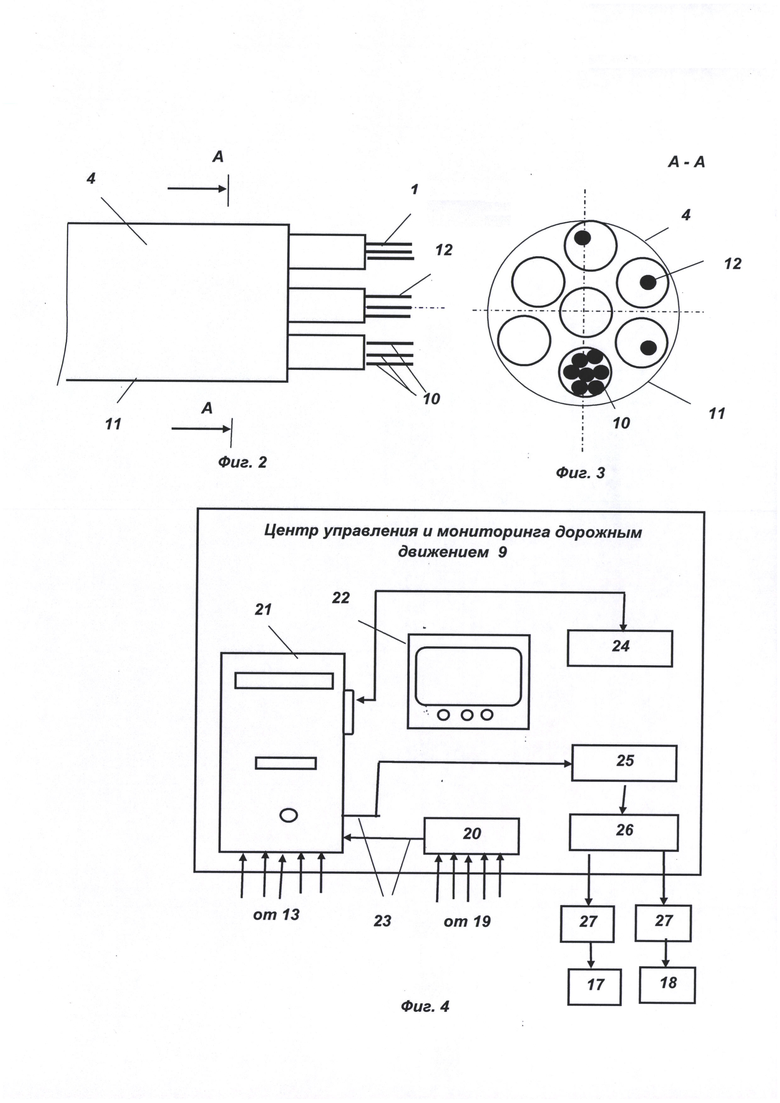
на фиг. 2 приведена ВОЛС,
на фиг. 3 приведен разрез А-А ВОЛС,
на фиг. 4 приведена схема блока предварительной обработки,
на фиг. 5 приведен участок дороги в поперечном разрезе.
на фиг. 6 показана схема передачи информации в центр управления дорожным движением по воздушным ВОЛС,
на фиг. 7 приведена схема передачи информации в центр управления дорожным движением по подземным канализационным ВОЛС,
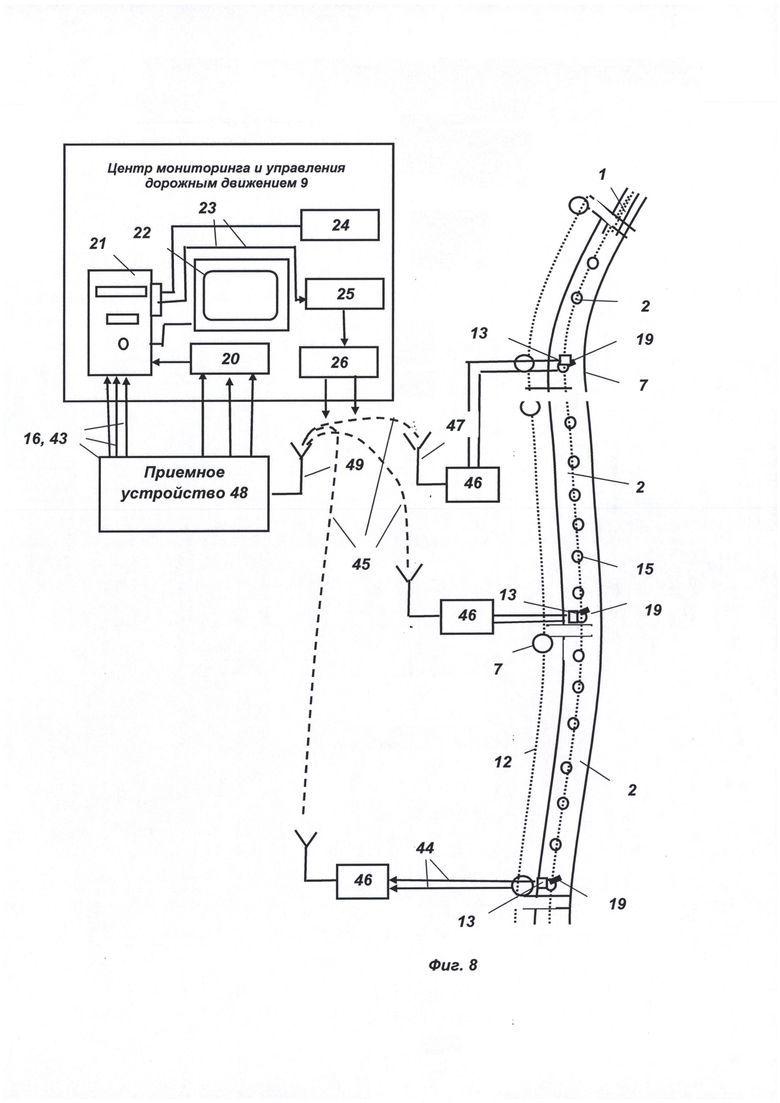
на фиг. 8 приведена схема передачи информации в центр управления дорожным движением по радиоканалам,
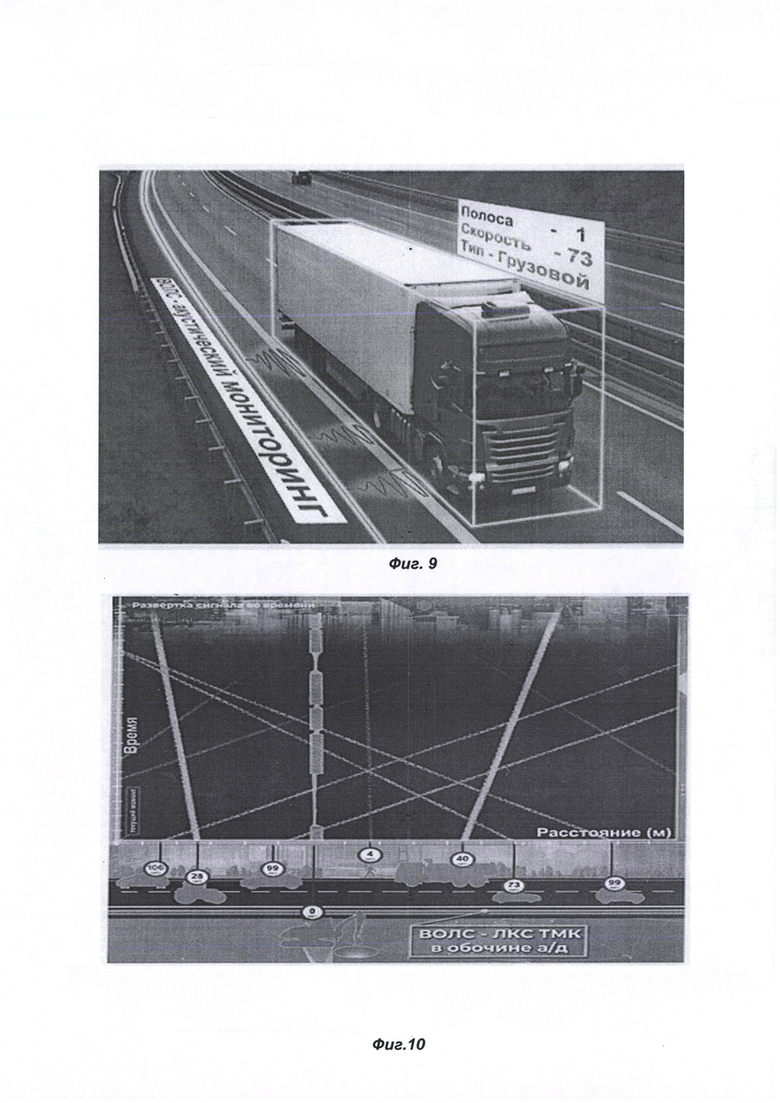
на фиг. 9 приведен внешний вид тягача с прицепом на экране монитора.
на фиг. 10 приведен внешний вид нескольких объектов на экране монитора.
Условные обозначения принятые в описании:
дорога 1,
участок контроля дорожного движения 2,
волоконно-оптическая линия связи 3,
канал кабельной канализации 4,
сплиттер 5,
поверхность грунта 6,
колодец 7,
крышка 8,
центр управления дорожным движением 9,
волокно для передачи информации 10,
трубка 11,
сенсорное оптическое волокно 12,
блок предварительной обработки 13,
шкаф 14,
столб 15,
линия связи 16,
светофоры 17,
информационные табло 18,
видеокамера 19,
видеомодуль 20,
компьютер 21,
монитор 22,
внутренний канал связи 23,
система хранения данных 24,
система управления 25,
контроллер управления 26,
исполнительные механизмы 27,
дорожное покрытие 28,
насыпка 29,
полоса движения 30,
разделительная разметка 31,
оптическое волокно 32,
передатчик сигнала 33,
приемник сигнала 34,
усилитель 35,
преобразователь 36,
процессор предварительной обработки сигнала 37,
блок памяти 38,
блок питания 39,
субъект 40,
объект 41,
транспортное средство 42,
воздушная линия ВОЛС 43,
канализационная линия ВОЛС 44,
радиоканал 45,
передающее устройство 46,
передающая антенна 47,
приемное устройство 48,
приемная антенна 49.
Система (фиг. 1) предназначена для мониторинга состояния дороги 1, контроля дорожного движения, в том числе соблюдения ПДД (Правил дорожного движения) на автомобильной дороге с применением сенсорного оптического волокна.
Дорога 1 (фиг. 1) содержит участки контроля дорожного движения 2 длиной L, вдоль которой проложена волоконно-оптическая линия связи ВОЛС 3, в одном из каналов кабельной канализации 4.
В настоящее время достигнута длина участка контроля дорожного движения L=70…100 км. В будущем, по мере совершенствования аппаратуры, длина L может быть значительно увеличена.
Волоконно-оптическая линия связи 3 фиг. 2 и 3 и ее система мониторинга содержат: канал кабельной канализации 4, в котором уложены ВОЛС 3. Канал кабельной канализации 4 выполнен под поверхностью грунта 6 и проложен через колодцы 7 с крышками 8. Колодцы 7 ставятся через 100…1000 метров в соответствии с проектом.
Общий контроль всей дороги 1 выполняет центр управления дорожным движением 9. ВОЛС 3 содержат волокна следующего назначения (фиг. 2 и 3): волокно для передачи информации 10, проложенное в трубке 11 и сенсорное оптическое волокно 12 - одно из этих волокон.
В начале каждого участка контроля и управления дорожным движением 2 (фиг. 1) установлен блок предварительной обработки 13. Блок предварительной обработки 13 установлен в шкафу 14 около столба 15. Может быть вариант подземного размещения блоков предварительной обработки 13.
Система включает светофоры 17, информационные табло 18, видеокамеры 19 с видеомодулями 20, для обработки видеосигнала. В качестве видеомодулей 20 могут быть применены платы видеозахвата или мультиплексор.
Все блоки предварительной обработки 13 линиями связи 16 (характеристика которых будет дана позже) соединены с центром управления дорожным движением 9 для получения всей информации о мониторинге состояния дороги и контроле дорожного движения, ее обработки и предоставления пользователю в удобной форме.
По меньшей мере, по одной видеокамере 19 установлено на входе в каждый участок контроля дорожного движения 2, к выходу видеокамер 19 присоединен видеомодуль 20 для преобразования сигнала видеокамер в видеосигнал.
Центр мониторинга дорожного движения 9 содержит компьютеры 21 и мониторы 22. Клавиатура и манипулятор типа «мышь» на. фиг. 1…10 не показаны. Компьютеры 21 внутренними каналами связи 23 соединены со всеми блоками предварительной обработки 13. Все светофоры 17 и информационные табло 18 соединены с блоками предварительной обработки 13.
В состав центр управления дорожного движения 9 входят система хранения данных 24, система управления 25, выход которой соединен с входом контроллера управления 26, выходы из которого соединены с исполнительными механизмами 27, которые в свою очередь, соединены со светофорами 17, шлакбаумами и информационными табло 18 (фиг. 1).
Дорога 1 содержит дорожное покрытие 28 (фиг. 1 и 4) и насыпь 29 под ним для каждой полосы движения 30, которые разделены разделительной разметкой 31.
Сенсорное оптическое волокно 12 соединено отрезком оптического волокна 32 через одну из ветвей сплиттера 5 с одной стороны с входящим в состав блока предварительной обработки 13 передатчиком сигнала 33, а другой стороной сплиттер 5 соединен с входом в приемник сигнала 34, выход которого соединен с входом в усилитель 35, выход усилителя 35 соединен с входом в преобразователь 36 (для преобразования светового сигнала в электрический), выход из преобразователя 36 соединен с входом в процессор предварительной обработки сигнала 37, выход которого соединен с блоком памяти 38, для хранения информации.
Второй выход из процессора предварительной обработки сигнала 37 каждого блока предварительной обработки 13 линией связи 16 соединен с центром управления дорожным движением 9.
Каждый блок предварительной обработки 13 имеет блок питания 38.
Передатчик сигнала 33 генерирует и передает на вход каждого сенсорного оптического волокна 12 прямоугольные лазерные импульсы с частотой от 10 8 до 10 9 Гц для создания опорного сигнала, предназначенного для привязки к нему пакета шумовых импульсов.
Приемник сигнала 34 предназначен для регистрации шумовых импульсов и работает на частотах от 0 Гц до 1000 МГц, т.е. в диапазоне инфразвука, звука и ультразвука, табл.1.

Из табл. 1 следует, что целесообразно использовать для идентификации объектов и субъектов инфразвук, звук и ультразвук.
Первоначальная база данных создана разработчиками при испытании первого образца системы. Потом система постоянно проходит самообучение.
Шумовые импульсы создают субъекты 40, объекты 41, в том числе транспортные средства 42. Шумовые импульсы каждого субъекта 40 и объекта 41 индивидуальны по частотам и гармоникам. Используя базу данных шумовых импульсов различных субъектов 40 и объектов 41, можно их идентифицировать.
На въезде в каждый участок контроля и управления дорожным движением 2 установлена по меньше мере одна видеокамера 19, для фиксации въезда (входа) субъекта 40 или объекта 41, в том числе транспортного средства 42, выполненная с возможностью распознавания номера и типа транспортного средства 42.
Центр управления мониторинга и управления дорожным движением 9, как упомянуто ранее, оборудован компьютером 21 с монитором 22, при этом компьютер 21 имеет визуальную базу данных субъектов 40 и объектов 41, в том числе транспортных средств 42 различного вида и назначения.
К транспортным средствам 42 относятся: велосипеды, мопеды, мотоциклы, легковые и грузовые автомобили, автобусы, тракторы и экскаваторы.
Компьютер 21 выполнен с возможностью распознавания по сигналу, полученному с сенсорного оптического волокна 12 типа транспортного средства 42, его веса и скорости передвижения и вывода информации о месте нахождения, скорости перемещения и внешнем виде транспортного средства 42 на монитор 22.
Это достигнуто применением программных средств.
Для управления движением компьютер 21 использует соответствующее программное обеспечение, передает сигнал на систему управления, которая далее передает сигнал на контроллер управления 26 и на исполнительные механизмы 27 для переключения светофоров 17, закрытия шлакбаумов (не показаны), информационных табло 18 и др. действий.
Возможна передача информации о чрезвычайных происшествиях в МЧС (Министерство чрезвычайных ситуаций), а в случае преступления - в МВД (Министерство внутренних дел).
На фиг. 5 приведен участок дороги 1 в поперечном разрезе.
Передача информации с блоков предварительной обработки 13 в центр управления дорожным движением 9 может быть выполнена различными способами.
На фиг. 6 приведена передача сигнала при использовании в качестве линии связи 16 воздушных линий ВОЛС 43 на воздушных линиях электропередачи (ВОЛС-ВЛ).
На фиг. 7 приведена система передачи с применением в качестве линий связи 16 каналов системы подземной канализации 44, проложенной в грунте и колодцах 7.
На фиг. 8 приведена система передачи сигнала по радиоканалу 45 с помощью передающих устройств 46 с передающими антеннами 47 и приемным устройством 48 с приемной антенной 49.
На фиг. 9 и 10 приведены варианты интерпретации ситуации на дороге при помощи монитора 22.
Работа системы
После сборки системы производят ее тестирование с различными субъектами 40 и объектами 41, в том числе транспортными средствами 42 (фиг. 1) и устанавливают зависимость сигнала от вида субъекта 40 и объекта 41.
Далее приведен неполный перечень субъектов:
человек, домашнее животное: корова, коза, баран, собака, кот, дикие звери: лось, медведь, волк, кабан, лиса, заяц.
Объекты:
трактор, экскаватор, комбайн,
транспортные средства:
мотоцикл, легковой автомобиль, грузовой автомобиль, автобус.
Определяют местоположение всех объектов и субъектов в любой момент времени в режиме «он-лайн», рассчитывают мгновенную и среднюю скорости перемещения субъекта или объекта, соответственно 40 или 41.
Определяют зависимость вида сигнала от объекта: легкового автомобиля, грузового автомобиля, автобуса, трактора, экскаватора при различных климатических условиях.
Для работы вводят информацию о внешнем виде эталонных объектов и эталонных сигналов для них (в различных климатических условиях) в блок памяти компьютера 21.
При прохождении субъекта 40 или объекта 41 недалеко от оптического сенсорного волокна 12 возникает виброакустический сигнал, который из оптического сенсорного волокна 12 по оптическому волокну 32 передается сначала на вход в приемник сигнала 34, потом на вход в усилитель 35, потом на вход в преобразователь 36, с выхода преобразователя 36 - на вход в процессор предварительной обработки сигнала 37. Процессор предварительной обработки сигнала 37 далее передает информацию в блок памяти 38, для хранения информации и в компьютер 21 для обработки, который по виду виброакустического сигнала определяет тип субъекта 40 или объекта 41 (фиг. 1).
Осуществляется это следующим образом.
Каждый виброакустический сигнал сравнивают с эталонными сигналами всех субъектов 40 и объектов 41 из базы и при максимальном совпадении делается вывод о совпадении реального объекта с эталонным.
Второй этап
Сравнивают изображение с эталонным фото реального объекта и фото реального объекта, полученное с одной из видеокамер 19, помещают на план местности и дороги 1 в формате 2D под интересующей нас точкой на дороге 1.
Все эти действия повторяют при различных климатических условиях:
- в знойную жару,
- в сильный мороз,
- в дождь,
- в гололед.
Определяют сигнальные шумы с учетом этих климатических условий и также вносят их в базу данных.
Для контроля состояния поверхности практическим путем определяют, как меняют шумы различные дефекты дорог: трещины, выбоины, размыв насыпи.
При максимальном совпадении фактических сигналов с сигналами в базе данных делается вывод: «ПРЕДПОЛОЖИТЕЛЬНО».
При полном несовпадении сигналов делается вывод: «НЕ ИЗВЕСТНО».
Идет постоянное уточнение, и при необходимости, обновление и пополнение информации эталонных виброакустических сигналов. В этом и заключается самообучение системы.
При проведении распознания субъекта 40 или объекта 41 вводят данные о климатических особенностях в районе расположения участка контроля дорожного движения 2 дороги 1. Осуществляют контроль температуры вдоль сенсорного оптического волокна 12.
Это значительно уточнит распознавание субъектов и объектов.
Заявителем изготовлены опытные образец устройств, входящих в состав системы и проведены испытания с положительными результатами (фиг. 9 и 10).
Чувствительность сенсорного волокна позволяет обнаружить воздействия:
движение человека на расстоянии 5-10 м,
земляные работы шанцевым инструментом 10-18 м,
движение легкового автомобиля 50…70 м,
движение тяжелой техники 120…200 м.
При обрыве сенсорного волокна 12 в центр управления дорожным движением 9 поступает сигнал, по которому можно определить место обрыва с точностью до 1 м. Возможно применение нескольких сенсорных волокон 12.
Планируется серийное изготовление системы.
В результате внедрения группы изобретений возникла возможность:
- обеспечить мониторинг состояния дороги, в том числе покрытия и насыпи, износ, размыв, трещины, выбоины в режиме «он лайн»,
- обеспечить контроль климатического состояния дороги: дождь, снег, гололед,
- обеспечить определение объектов или субъектов, продвигающихся по поверхности около сенсорного оптического волокна, определить их тип, вес, скорость и направление перемещения,
- обеспечить определение типа объектов или субъектов в разных климатических условиях, температуре, осадках и т.д.,
- значительно уменьшить количество видеокамер и радаров на дороге и тем самым уменьшить стоимость проекта в несколько раз,
- эффективнее распознавать нарушение транспортными средствами ПДД и фиксировать аварии,
- автоматически управлять дорожным движением, используя исполнительные механизмы, например, светофоры, шлакбаумы и информационные табло.
- автоматически фиксировать нарушения ПДД и превышения весо-габаритных характеристик транспортными средствами и другими участниками дорожного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2019 |
|
RU2698097C1 |
| Волоконно-оптическая линия связи и устройство для ее прокладки в трубе канала подземной кабельной канализации | 2016 |
|
RU2632576C1 |
| Устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей | 2023 |
|
RU2801071C1 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ОБОРУДОВАНИЯ | 2020 |
|
RU2753736C1 |
| СИСТЕМА ПЕРЕГОННОЙ СВЯЗИ | 2019 |
|
RU2713776C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| Система мониторинга подвижного состава и инфраструктуры железнодорожного транспорта на основе беспроводных технологий | 2022 |
|
RU2794600C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДАХ | 2005 |
|
RU2284939C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ СВЯЗИ, КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2017 |
|
RU2645285C1 |
| Система контроля и диагностики искусственных сооружений | 2019 |
|
RU2717693C1 |



Группа изобретений относится к системам контроля с применением сенсорного оптического волокна и предназначено для передачи потоков информации по результатам постоянного мониторинга в том числе и соблюдения Правил дорожного движения (ПДД) протяженного участка дороги с применением минимального количества видеокамер и радаров. Технический результат состоит в обеспечении получения информации о состоянии дорожного покрытия и проведение мониторинга дорожного движения в режиме «он лайн». Для этого система мониторинга состояния дороги, контроля и управления дорожным движением содержит центр управления дорожным движением с компьютером и монитором и дорогу, разделенную на участки контроля и управления дорожным движением, каждый из которых оборудован блоком предварительной обработки, содержащим передатчик сигнала, выход которого соединен с сенсорным оптическим волокном, приемник сигнала, вход которого соединен с выходом сенсорного оптического волокна, а выход которого соединен с входом в усилитель, выход которого соединен с входом в преобразователь, выход преобразователя соединен с входом в процессор предварительной обработки сигнала, соединенный линиями связи с центром мониторинга и управления дорожным движением и, по меньшей мере, по одной видеокамере на входе и на выходе из участка контроля и управления дорожным движением, тем, что в качестве сенсорного волокна используется, по меньшей мере, одно оптическое волокно волоконно-оптической линии связи, проложенное вдоль обочины дороги, при этом компьютер выполнен с возможностью распознавания типа субъекта или объекта, в том числе транспортного средства, и определения его скорости и направление движения за счет предварительной тарировки с разными субъектами и объектами, и наличия визуальной базы данных субъектов и объектов, например, транспортных средств различного вида, назначения и веса, и базы эталонных виброакустических сигналов, создаваемых ими, и выполнен с возможностью по сигналу, полученному с сенсорного оптического волокна выводить информацию о месте нахождения на плане местности всех субъектов и объектов, скорости их перемещения и внешнем виде - на монитор, в систему хранения данных и систему управления. 2 н. и 7 з.п. ф-лы, 1 табл., 10 ил.
1. Система мониторинга состояния дороги и дорожного движения, содержащая центр управления дорожным движением, соединенный по линиям связи с блоками предварительной обработки, расположенными на каждом участке контроля и управления дорожным движением разделенной на участки дороги, вдоль которой расположен волоконно-оптический кабель, включающий: сенсорное оптическое волокно, на каждом участке контроля и управления дорожным движением, на входе и на выходе его расположено, по меньшей мере, по одной видеокамере, соединенной с центром управления, при этом блок предварительной обработки содержит приемник, вход которого соединен с сенсорным оптическим волокном, а выход через последовательно соединенные усилитель и преобразователь соединен с процессором предварительной обработки сигнала с памятью, сигналы с которого поступают на передатчик сигналов в центр управления дорожным движением, отличающаяся тем, что волоконно-оптический кабель расположен на обочине дороги, разделенной на участки, при этом компьютер блока центра управления выполнен с возможностью распознавания типа субъекта или объекта, в том числе транспортного средства по принимаемому от блоков предварительной обработки сигналов путем сравнения принятого сигнала, несущего виброакустическую информацию с хранящимися в памяти компьютера эталонными виброакустическими сигналами, в результате чего определяют скорость и направление движения объектов или субъектов различного типа и выводят полученную информацию на плане местности о всех субъектах и объектах на монитор, при этом эталонные виброакустические сигналы получают за счет предварительной тарировки виброакустических сигналов, создаваемых разными субъектами и объектами, и наличия визуальных данных соответствующих субъектов и объектов.
2. Система по п. 1, отличающаяся тем, что получение эталонных виброакустических сигналов производят в условиях нахождения эталонных объектов и субъектов с разной нагрузкой и в разных климатических условиях.
3. Система по п. 1, отличающаяся тем, что линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением выполнены в виде волоконно-оптической линии связи, расположенной на воздушной линии электропередачи.
4. Система по п. 1, отличающаяся тем, что линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением выполнены в виде волоконно-оптической связи, расположенной в подземной канализации,
5. Система по п. 1, отличающаяся тем, что линии связи, соединяющие блоки предварительной обработки с центром мониторинга и управления дорожным движением выполнены посредством радиоканалов.
6. Способ функционирования системы мониторинга состояния дороги и дорожного движения, включающий сбор виброакустических сигналов с сенсорного оптического волокна в компьютер центра управления дорожным движением и вывод информации на монитор, отличающийся тем, что, по меньшей мере, одно сенсорное оптическое волокно расположено в волоконно-оптическом кабеле, проложенном вдоль обочины дороги, предварительно перед функционированием системы производят самообучение системы путем сбора эталонных виброакустических сигналов, возникающих в сенсорном оптическом волокне при проходе и проезде по дорожному покрытию разнообразных эталонных субъектов и объектов, измеряют виброакустический сигнал, запоминают его как эталонный и привязывают к конкретному изображению эталонного типа объекта или субъекта, полученному с видеокамеры, а в процессе функционирования системы измеряют виброакустический сигнал проходящих и проезжающих по дорожному покрытию разнообразных реальных субъектов и объектов, сравнивают его с эталонными сигналами и при совпадении выводят изображение этого субъекта или объекта на экран монитора под условным изображением в формате 2D анализируемой точки на плане дороги и перемещают условное изображение по дороге синхронно с перемещением реального субъекта или объекта по дороге.
7. Способ по п. 6, отличающийся тем, что самообучение системы производят при условии нахождения эталонных объектов и субъектов с разными нагрузками и в различных климатических условиях.
8. Способ по п. 6, отличающийся тем, что в качестве объектов в базе данных размещены изображения транспортных средств различного вида и назначения, в том числе мотоциклов, тракторов и экскаваторов.
9. Способ по п. 6, отличающийся тем, что в качестве эталонных субъектов в базе данных размещены изображения людей, домашних животных и диких зверей.
| СИСТЕМА БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2019 |
|
RU2698097C1 |
| Система мониторинга верхнего строения безбалластного и бесстыкового пути на мосту высокоскоростной магистрали | 2018 |
|
RU2681766C1 |
| Способ скоростной обработки торцовым фрезерованием по копиру криволинейных поверхностей, например, лопастей гребных винтов | 1948 |
|
SU83866A1 |
| Установка для подъема на парашюте | 1934 |
|
SU43093A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 5042027 A, 20.08.1991. | |||

