Изобретение относится к области машиностроения, а именно к транспортным средствам с гибридными силовыми установками, предназначенным для перевозки пассажиров и грузов на большие расстояния.
Основной областью применения изобретения являются системы управления энергоустановками беспилотных транспортных средств с гибридными силовыми установками последовательного типа.
Такие системы позволяют управлять работой двигатель-генераторной установкой беспилотного подзаряжаемого гибридного автомобиля с силовой установкой последовательного типа при его движении по заданному маршруту с учетом внешних воздействующих факторов, к которым относятся параметры маршрута следования (скоростные ограничения, рельеф местности, тип дорожного покрытия,…), погодные условия (скорость и направления ветра, температура окружающей среды, осадки,…), ограничения на маршруте следования (пробки, аварии, ремонтные работы, экологические зоны, в которых запрещена эксплуатация ДВС,…), параметры самого ТС (энергопотребление вспомогательных агрегатов, параметры эффективности компонентов энергоустановки, давление в шинах,…).
Из уровня техники известны транспортные средства (далее ТС) с гибридными силовыми установками, в состав энергоустановок которых входят такие элементы, как тяговый электропривод (ТЭП), включающий электродвигатель и преобразователь, бортовой накопитель энергии (электрохимический, механический, гидравлический, и пр.), бортовое зарядное устройство (двигатель-генераторную установку на базе двигателя внутреннего сгорания (ДВС) и генератора, электрохимический генератор и т.п.), кроме того ДВС, в случае его использования в составе бортового зарядного устройства в некоторых конструкциях ТС может использоваться для движения ТС, а также конструкцией ТС может быть предусмотрена возможность использования внешней стационарной подзарядки бортового накопителя энергии от централизованной электросети или т.п., причем элементы энергоустановок гибридных ТС могут комбинироваться в зависимости от выбранной схемы (последовательный гибрид, параллельный гибрид, последовательно-параллельный гибрид, любой из перечисленных с внешней подзарядкой).
Также из уровня техники известны беспилотные транспортные средства, позволяющие в сравнении с традиционными автомобилями увеличить запас хода ТС и снизить расход топлива за счет централизованного управления транспортным потоком, сократить временные затраты на перевозки, а также увеличить их оборот за счет централизованного управления транспортным потоком, минимизировать ДТП и человеческие жертвы, снизить стоимость перевозок, снизить экологический ущерб от автомобильного транспорта, повысить пропускную способность существующей дорожной сети и др. Управление беспилотным транспортом осуществляется бортовой системой управления, которая получает информацию от всех компонентов и систем ТС, а также может быть связана централизованной системой управления через инфраструктурные объекты.
Гибридные силовые установки на беспилотном транспорте, в основном, но не ограничиваясь этим, предназначены для увеличения пробега (запаса хода) ТС на одной зарядке бортового накопителя энергии за счет его подзарядки при движении по маршруту от бортового зарядного устройства.
Из уровня техники известен автономный бескабинный седельный тягач (RU 192462, 17.09.2019). В патенте описана конструкция беспилотного бескабинного седельного тягача с гибридной силовой установкой последовательного типа. Представленная конструкция позволяет добиться увеличения запаса хода ТС в случае равной аналогу (электрическому тягачу) полезной массы перевозимого груза за счет снижения массы энергоустановки путем замещения части аккумуляторных батарей бортового накопителя энергии двигатель-генераторной установкой, а также за счет снижения общей массы ТС путем замещения кабины аэродинамическим обтекателем. К недостаткам представленного ТС следует отнести то, что система управления энергоустановкой не учитывает влияние внешних факторов, в том числе высотного профиля маршрута, погодных условий, ограничений на пути следования ТС, на энергопотребление ТС при движении по заданному маршруту, а также не обеспечивает функционирование компонентов энергоустановки на оптимальных рабочих режимах, что в совокупности негативно сказывается на запасе хода ТС и на ресурсе компонентов энергоустановки и прочих систем ТС, включая рабочую тормозную систему.
Из уровня техники известны патентные документы (DE 102012011996, 19.12.2013; US 9114806, 25.08.2015; DE 102008036457, 03.03.2011), в которых раскрыто управления гибридными транспортными средствами, учитывающее влияние внешних факторов на энергопотребление ТС при движении по маршруту. К общим недостаткам следует отнести низкую точность прогнозирования нагрузки на компоненты энергоустановки (ДВС и ТЭП) ТС в связи с тем, что не учитывается информация о внешних факторах, оказывающих влияние на энергопотребление ТС при движении по маршруту, в том числе о параметрах маршрута, влияющих на силу сопротивления движения ТС (тип дорожного полотна, сопротивление поворотов), о погодных факторах (ветер, осадки), данные от инфраструктурных объектов дорожной сети (система V2I) о фактических параметрах маршрута, окружающей среды и трафика на маршруте (уточняющие параметры) и данные от других транспортных средств (система V2V) о фактических параметрах трафика и ограничениях на пути следования ТС по маршруту (уточняющие параметры). Также к недостаткам следует отнести невысокую эффективность управления силовыми агрегатами энергоустановки (ДВС, ТЭП, аккумуляторной батареей), в связи с тем, что не учитывается эффективные зарядно-разрядные параметры аккумуляторной батареи, а также не учитывается энергопотребление вспомогательных агрегатов. Кроме того, следует отметить, что в указанных патентных документах не раскрыта ориентирование на оптимизацию работы именно беспилотного транспортного средства, поэтому, несмотря на то, что учитывается прогнозирование манеры вождения, в результате в целом на работу ТС при движении по маршруту оказывает влияние человеческий фактор, что в свою очередь оказывает дополнительное негативное влияние на неточность в прогнозировании нагрузки на приводные агрегаты и управлении ТС. Все перечисленные недостатки оказывают негативное влияние на энергопотребление при движении ТС и, как следствие, на запас хода ТС, а также сокращают ресурс компонентов энергоустановки и компонентов рабочей тормозной системы ТС.
Наиболее близким аналогом (прототипом) предлагаемого изобретения является способ определения точки активации удлинителя диапазона в электромобиле (DE 102010039653, 23.02.2012). В заявке описывается система управления включением бортового зарядного устройства электромобиля (range extender - расширитель диапазона электромобиля) для зарядки тяговой батареи в зависимости от прогнозируемой величины энергопотребления по маршруту движения ТС. Маршрут разбивается на конечное количество участков от текущего места положения автомобиля до пункта назначения, для каждого из участков определяется энергопотребление, бортовое зарядное устройство включается, если запас энергии меньше предполагаемого потребления на предстоящем отрезке пути до пункта назначения (положение отслеживается с помощью системы позиционирования GPS), заряд осуществляется до достижения необходимого уровня заряда. Учитывается информация о свойствах маршрута (длина маршрута и каждого его участка, тип дороги, ожидаемая и максимальная скорость на каждом участке, уклон дороги), параметрах и текущем состоянии ТС (текущее состояние заряда тяговой батареи и его рабочий диапазон, массогабаритные параметры), энергопотреблении вспомогательных агрегатов (вторичных потребителей: свет, стеклоочистители, отопление и кондиционирование и т.п.), предпочтительных эффективных режимах работы ДГУ, величине заряда тяговой батареи в конце маршрута, стоимости электроэнергии из розетки стационарного зарядного устройства в пункте назначения, ограничениях на включение расширителя в зонах с нулевым выбросом и на подъезде к пункту назначения, типе водителя (манере езды). Расчет точки активации зарядного устройства может обновляться непрерывно.
К недостаткам представленного способа следует отнести следующее:
- при прогнозировании величины энергопотребления ТС по маршруту движения не учитывается информация о внешних факторах, оказывающих влияние на энергопотребление ТС при движении по маршруту, в том числе о параметрах маршрута, влияющих на силу сопротивления движения ТС (сопротивление поворотов), о погодных факторах (ветер, осадки, температура), информация об ограничениях движения ТС по маршруту (пробки, аварии, ремонтные работы), данные от инфраструктурных объектов дорожной сети (система V2I) о фактических параметрах маршрута, окружающей среды и трафика на маршруте (уточняющие параметры), данные от других транспортных средств (система V2V) о фактических параметрах трафика и ограничениях на пути следования ТС по маршруту (уточняющие параметры);
- при управлении силовыми агрегатами энергоустановки ТС (ДВС, ТЭП, аккумуляторной батареей) не учитывается использование энергии рекуперативного торможения для пополнения заряда аккумуляторной батареи, возможность использования внешней стационарной зарядки аккумуляторной батареи в промежуточных точках маршрута, а также эффективные зарядно-разрядные параметры аккумуляторной батареи (карта КПД аккумуляторной батареи: зависимость тока зарядки от температуры и уровня заряда аккумуляторной батареи);
- кроме того, следует отметить, что представленный способ не ориентирован на оптимизацию работы беспилотного транспортного средства, поэтому, несмотря на то, что он учитывает прогнозирование манеры вождения, в результате в целом на работу ТС при движении по маршруту оказывает влияние человеческий фактор, что в свою очередь оказывает дополнительное негативное влияние на неточность в прогнозировании нагрузки на приводные агрегаты и эффективность управления ТС.
Все перечисленные недостатки оказывают негативное влияние на запас хода ТС, ресурс компонентов энергоустановки и компонентов рабочей тормозной системы ТС, а также на экологический ущерб окружающей среде и снижение расхода топлива и электроэнергии на преодоление маршрута и, как следствие, на стоимость поездки.
Задача, решаемая изобретением, состоит в разработке системы управления энергоустановкой беспилотного гибридного автомобиля, обеспечивающей эффективное управление компонентами этой энергоустановки с учетом внешних факторов, оказывающих влияние на энергопотребление ТС при движении по заданному маршруту, основанное на максимальном использовании электроэнергии для заряда бортовой аккумуляторной батареи от стационарной централизованной электросети, наиболее эффективном использовании рекуперативной энергии торможения ТС, а также на выработке электроэнергии бортовым зарядным устройством на базе ДВС на оптимальных с точки зрения энергопотребления и ресурса компонентов энергоустановки режимах.
Технический результат заключается в повышении запаса хода беспилотных автомобилей с гибридной энергоустановкой, а также в увеличении ресурса компонентов этой энергоустановки и увеличении ресурса компонентов рабочей тормозной системы этого автомобиля.
Технический результат достигается тем, что система управления энергоустановкой беспилотного гибридного автомобиля содержит блок управления автомобилем, который непрерывно осуществляет управление бортовым зарядным устройством автомобиля с гибридной силовой установкой последовательного типа на основании прогнозируемой величины энергопотребления по маршруту движения автомобиля с учетом параметров маршрута, в том числе длины маршрута, уклона дороги, типа дороги, ожидаемой и максимальной скорости на каждом участке маршрута, получаемых по каналам связи от модуля интернет связи автомобиля, параметров и текущего состояния автомобиля, в том числе текущего уровня заряда аккумуляторной батареи и ее рабочего диапазона, передаваемых от аккумуляторной батареи, массогабаритных параметров ТС, записанных в блоке управления автомобилем, энергопотребления вспомогательных агрегатов и предпочтительных эффективных режимов работы бортового зарядного устройства, записанных в блоке управления автомобилем, а также задаваемых посредством интерфейса ввода и отображения, входящего в состав блока управления автомобилем, величины заряда аккумуляторной батареи в конце маршрута, возможности использования для зарядки аккумуляторной батареи электроэнергии из стационарного зарядного устройства в пункте назначения, ограничений на включение бортового зарядного устройства в зонах с нулевым выбросом и на подъезде к пункту назначения, причем блок управления автомобилем содержит блок пилотирования, предназначенный для управления тяговым электроприводом, рабочей и стояночной тормозной системами с целью обеспечения величины крутящего момента на ведущих колесах беспилотного гибридного автомобиля при движении по маршруту, соответствующего расчетному энергопрофилю маршрута, а также для управления приводом рулевого механизма беспилотного гибридного автомобиля, блок диагностики, предназначенный детектирования и предотвращения аварийных режимов работы компонентов беспилотного гибридного автомобиля на основании полученной от всех датчиков, компонентов и систем беспилотного гибридного автомобиля информации путем наложения управляющих запретов на работу компонентов беспилотного гибридного автомобиля, блок управления энергоустановкой, предназначенный для определения при помощи методов оптимального управления алгоритмов предиктивного управления бортовым зарядным устройством и тяговым электроприводом, основанных на учете влияния внешних факторов на энергопотребление беспилотного автомобиля с гибридной силовой установкой последовательного типа с возможностью внешней подзарядки при движении по заданному маршруту, а также обеспечивающих максимальное использование электроэнергии для заряда бортовой аккумуляторной батареи от стационарной централизованной электросети, максимальное использовании рекуперативной энергии торможения беспилотного гибридного автомобиля и выработку электроэнергии бортовым зарядным устройством на базе двигателя внутреннего сгорания на оптимальных с точки зрения энергопотребления и ресурса компонентов энергоустановки режимах:
- определения и прокладывания оптимального с точки зрения увеличения запаса хода и ресурса компонентов энергоустановки и рабочей тормозной системы беспилотного гибридного автомобиля маршрута, а также расчета цикла движения беспилотного гибридного автомобиля в виде графика скорости движения беспилотного гибридного автомобиля по всей длине проложенного маршрута блоком сбора и обработки данных, входящим в состав блока управления энергоустановкой,
- расчета на основании определенного цикла движения беспилотного гибридного автомобиля энергопрофиля маршрута в виде графика крутящего момента на приводных колесах по всей длине проложенного маршрута с учетом влияния внешних факторов на энергопотребление беспилотного гибридного автомобиля блоком моделирования движения автомобиля, входящим в состав блока управления энергоустановкой, который одновременно используется как для управления крутящим моментом на ведущих колесах в блоке пилотирования, входящим в состав блока управления автомобилем, так и для определения алгоритмов предиктивного управления бортовым зарядным устройством в блоке управления энергоустановкой,
- определения при помощи методов оптимального управления графика оптимальной мощности бортового зарядного устройства при движении беспилотного гибридного автомобиля по заданному маршруту, обеспечивающего уровень заряда аккумуляторной батареи, гарантирующий работу тягового электропривода по расчетному энергопрофилю маршрута,
- реализации оптимального управления бортовым зарядным устройством путем определения блоком формирования управляющих воздействий оптимальных значений управляющих параметров, обеспечивающих работу бортового зарядного устройства по графику оптимальной мощности,
при этом при реализации алгоритмов предиктивного управления бортовым зарядным устройством и тяговым электроприводом дополнительно учитываются такие параметры, как сопротивление при прохождении беспилотным гибридным автомобилем поворотов, погодные факторы, в том числе скорость и направление ветра, осадки и температура на каждом участке маршрута следования, информация об ограничениях движения беспилотного гибридного автомобиля по маршруту, в том числе пробки, аварии и ремонтные работы, данные от инфраструктурных объектов дорожной сети о фактических параметрах маршрута, окружающей среды и трафика на маршруте, данные от других транспортных средств о фактических параметрах трафика и ограничениях на пути следования беспилотного гибридного автомобиля по маршруту, наиболее предпочтительные параметры зарядного тока аккумуляторной батареи в зависимости от ее текущих параметров состояния, расположение стационарных зарядных станций, подключенных к централизованной электросети, для зарядки аккумуляторной батареи в промежуточных точках маршрута следования беспилотного гибридного автомобиля, глубина разряда аккумуляторной батареи, гарантирующая максимально эффективное использование кинетической энергии рекуперативного торможения беспилотного гибридного автомобиля для зарядки аккумуляторной батареи.
Система управления энергоустановкой гибридного автомобиля имеет следующие дополнительные отличия:
- что интерфейс ввода и отображения может обеспечивать дистанционный ввод и отображение требуемых параметров маршрута для возможности удаленного управления от автомобиля.
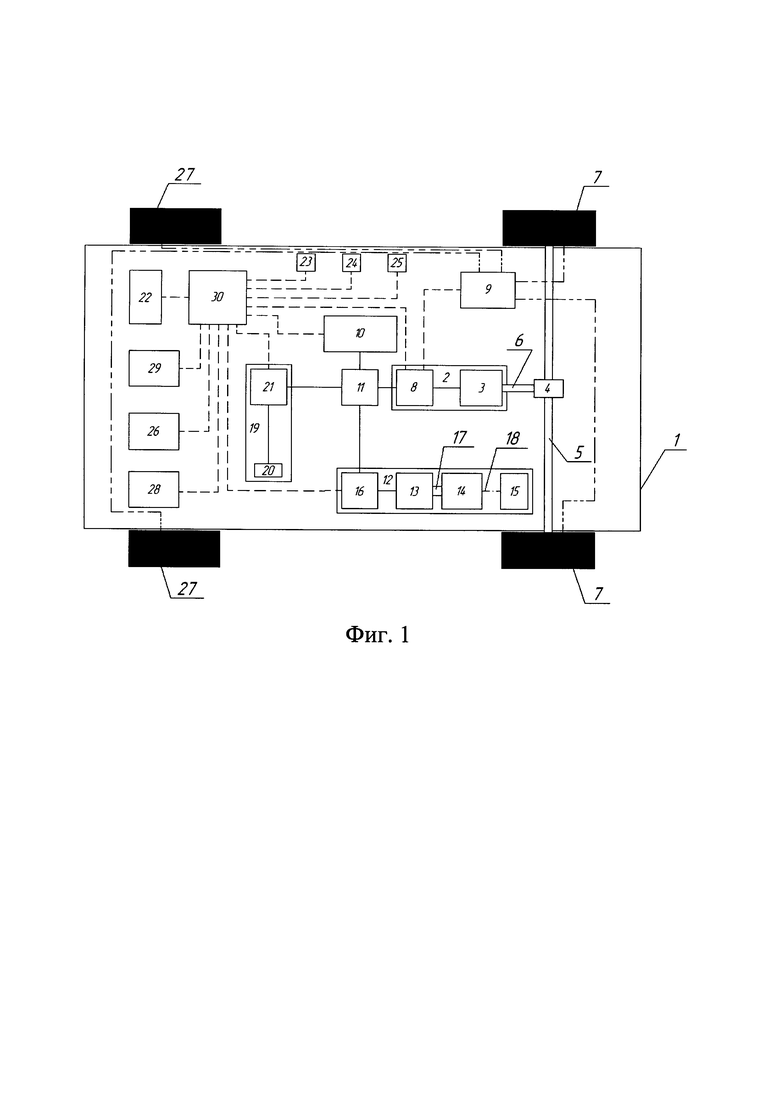
Изобретение иллюстрируется тремя чертежами, на которых представлена схема беспилотного автомобиля с гибридной силовой установкой последовательного типа с возможностью внешней подзарядки (Фиг. 1), схема блока управления автомобилем (Фиг. 2), схема блока управления энергоустановкой (Фиг. 3).
На фиг. 1 показан беспилотный автомобиль 1, в состав которого входят
1) гибридная силовая установка последовательного типа с возможностью внешней подзарядки, включающая в себя
(как минимум один) тяговый электропривод 2, состоящий из (как минимум) из одного электродвигателя (асинхронный/синхронный на постоянных магнитах и т.п.) 3, связанного с (как минимум одной) главной передачей 4 (как минимум одной) ведущей оси 5 беспилотного автомобиля 1 посредством (как минимум одного) карданного вала 6 и передающего через них крутящий момент на ведущие колеса 7, приводящие в движение беспилотный автомобиль 1, и (как минимум) одного преобразователя 8, контролирующего все параметры и управляющего электродвигателем 3 и приводом рабочей тормозной системы и стояночного тормоза 9 (электрическим, электромеханическим, электрогидравлическим и т.п.).
аккумуляторную батарею 10 (литий-ионные, литий-полимерные, литий-титанатные, свинцовые, и т.п.) питающую тяговый электропривод 2 и соединенную с тяговым электроприводом через общую шину постоянного тока 11,
бортовое зарядное устройство 12, состоящее из электрического генератора 13, двигателя 14 (внутреннего сгорания: бензин, дизель, газ, Ванкеля; внешнего сгорания), топливного бака 15 и преобразователя 16, причем электрический генератор 13 связан с двигателем 14, вращающего ротор генератора 13, посредством соединительного узла 17, в качестве которого могут выступать любые виды жесткого соединения (фланцевое, шлицевое, шпоночное и т.п.), муфты любого типа (фрикционная, упругая и т.п.) или любого преобразователя крутящего момента (гидротрансформатор и т.п.), двигатель 14 связан с топливным баком 15 посредством топливной магистрали 18, в качестве которой может выступать топливопровод, газопровод или любой другой герметичный трубопровод для передачи топлива, и предназначенное для зарядки аккумуляторной батареи 10 во время движения или остановок беспилотного автомобиля 1 через преобразователь 16, связанный с общей шиной постоянного тока 11,
устройство внешней подзарядки 19, состоящее из разъема 20 любого возможного типа (Mode 1, Mode 2, Mode 3, Mode 4, Tesla Supercharger и пр.) для подключения к стационарному зарядному устройству, а также преобразователя 21, соединенное с общей шиной постоянного тока 11, и предназначенное для зарядки аккумуляторной батареи 10 от стационарного зарядного устройства, включенного в сеть электроснабжения, при нахождении беспилотного автомобиля 1 на длительных остановках или стоянке,
2) блок сенсорики 22, в состав которого могут входить радары, лидары, ультразвуковые датчики, камеры, и прочие устройства для обнаружения и определения местонахождения объектов, окружающих беспилотный автомобиль 1, в пространстве,
3) радио модуль 23, предназначенный для связи беспилотного автомобиля 1 путем приема и передачи радио сигналов с инфраструктурными объектами (знаками, светофорами и т.п.) и другими ТС,
4) GPS модуль 24, предназначенный для определения координат фактического места нахождения беспилотного автомобиля 1 в реальном времени,
5) модуль интернет связи 25, предназначенный для получения и передачи информации из интернет ресурсов о параметрах маршрута (в том числе длине маршрута, уклоне дороги, типе дороги и дорожного покрытия, ожидаемой и максимальной скорости на каждом участке маршрута, сопротивлении поворотов), параметрах окружающей среды и погодных факторах (в том числе скорость и направление ветра, осадки и температура на каждом участке маршрута следования), о возможных ограничениях движения ТС (в том числе пробки, аварии и ремонтные работы), скорости движения транспортного потока (трафике), местах размещения стационарных зарядных станций, подключенных к централизованной электросети, по каналам связи GSM, LTE, 5G и т.п. по маршруту следования беспилотного автомобиля 1,
6) привод рулевого механизма 26 (электрический, электромеханический, электрогидравлический и т.п.), предназначенный для поворота как минимум двух управляемых колес 27 при движении беспилотного автомобиля 1 по заданному маршруту,
7) вспомогательные агрегаты 28 (светотехника, климатическая установка, привод стеклоочистителя и т.п.), обеспечивающие управление светотехникой, климатической установкой, приводом стеклоочистителя, а также иными системами беспилотного автомобиля 1, не относящимся к энергоустановке беспилотного автомобиля 1 и потребляющим энергию в ходе движения беспилотного автомобиля 1 по маршруту,
8) блок датчиков 29, включающий в себя датчики скорости и ускорений беспилотного автомобиля 1, давления в шинах, загрузки беспилотного автомобиля 1, температуры окружающей среды и воздуха в салоне беспилотного автомобиля 1, а также любые другие датчики, показывающие состояние систем беспилотного автомобиля 1, не входящих в состав привода тормозной системы 9, блока сенсорики 22, привода рулевого управления 26, вспомогательных агрегатов 28 и энергоустановки беспилотного автомобиля 1, и параметры окружающей среды в непосредственной близости к ТС,
9) блок управления беспилотным автомобилем 30, связанный со всеми описанными выше компонентами и отвечающий за получение и обработку информации о параметрах систем беспилотного автомобиля 1, маршруте, окружающей среды, определяющий (расчетным методом) оптимальные параметры и управляющий бортовым зарядным устройством 12, управляющий тяговым электроприводом 2, а также управляющий приводом тормозной системы 9 и приводом рулевого механизма 27 беспилотного автомобиля 1, одновременно с этим отвечающий за взаимодействие беспилотного автомобиля 1 с водителем/пассажиром/оператором посредством интерфейса ввода и отображения 31, входящего в состав блока управления автомобилем 30.
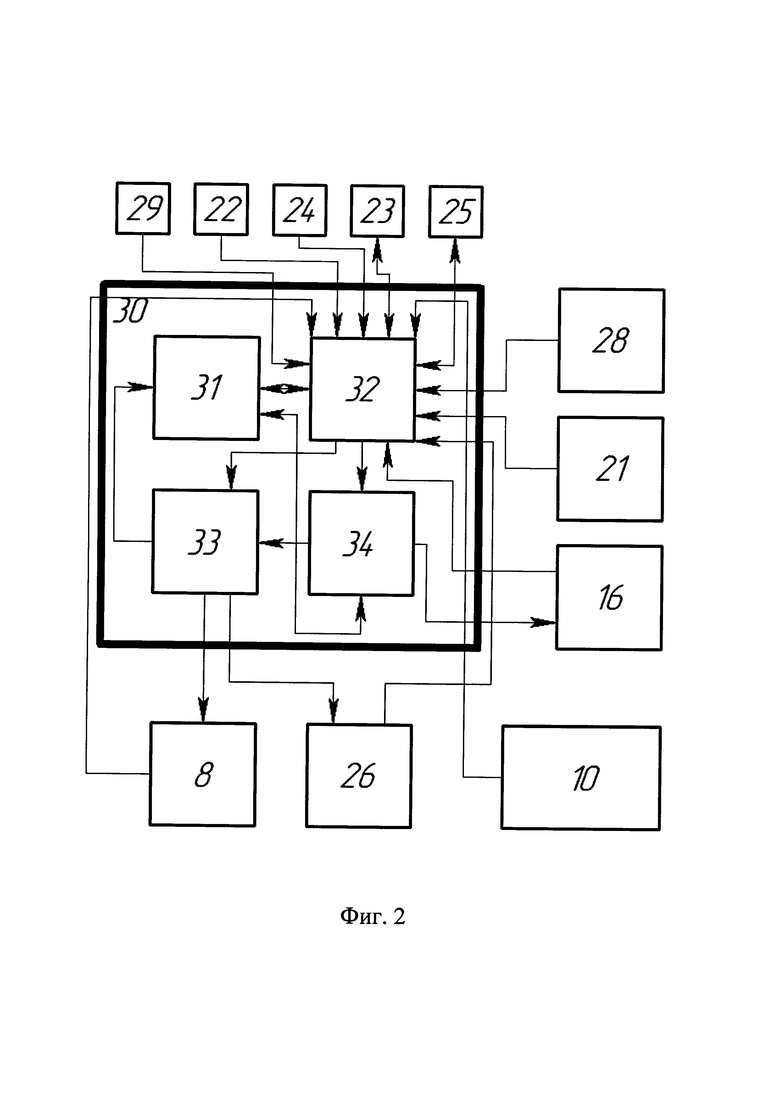
На фиг. 2 показано устройство блока управления автомобилем 30, в состав которого входят
1) интерфейс ввода и отображения 31, представляющий собой сенсорный (или кнопочный, или виртуальный, или расположенный вне транспортного средства - в центре управления перевозок, или любой другой) экран, предназначенный для ввода (в том числе дистанционного) водителем/пассажиром/оператором конечной точки маршрута следования беспилотного автомобиля 1, уровня заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, выбора возможности дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута, а также иных параметров следования и состояния беспилотного автомобиля 1, а также для визуализации (отображения информации) о параметрах компонентов беспилотного автомобиля 1, маршрута и окружающей среды по маршруту следования
2) блок диагностики 32, представляющий собой микропроцессорное устройство, предназначенное для
получения информации о текущем состоянии всех компонентов беспилотного автомобиля 1 от преобразователя 8 тягового электропривода 2 (который также передает информацию от привода рабочей тормозной системы и стояночного тормоза 9), аккумуляторной батареи 10, преобразователя 16 бортового зарядного устройства 12, преобразователя 21 устройства внешней подзарядки 19, привода рулевого механизма 26 и вспомогательных агрегатов 28, данных о текущих координатах беспилотного автомобиля 1 от GPS модуля 24, данных от блока сенсорики 22, информации из интернет ресурсов и обмена данными с инфраструктурными объектами по каналам связи (радио, GSM/LTE/5G) от радио модуля 23 и модуля интернет связи 25, а также данных о планируемом маршруте следования беспилотного автомобиля 1, задаваемых водителем/пассажиром/оператором беспилотного автомобиля 1 посредством интерфейса ввода и отображения 31, в том числе конечной точки маршрута следования беспилотного автомобиля 1, уровня заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, выбора возможности дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута, а также иных параметров следования и состояния беспилотного автомобиля 1,
передачи данных в интерфейс ввода и отображения 31 для отображения информации о параметрах компонентов беспилотного автомобиля 1, маршрута и окружающей среды по маршруту следования с целью информирования водителя/пассажира/оператора беспилотного автомобиля 1
детектирования и предотвращения аварийных режимов работы компонентов беспилотного автомобиля 1 путем наложения управляющих запретов на работу компонентов беспилотного автомобиля 1 посредством выставления запретов в блок пилотирования 33 и блок управления энергоустановкой 34,
обработки полученной информации для ее дальнейшей передачи в блок пилотирования 33 и блок управления энергоустановкой 34 для управления энергоустановкой беспилотного автомобиля 1,
3) блок пилотирования 33, представляющий собой микропроцессорное устройство, предназначенное для
получения исходных данных от блока диагностики 32 о маршруте следования беспилотного автомобиля 1, параметрах тягового электропривода 2, привода рабочей тормозной системы и стояночного тормоза 9, привода рулевого механизма 26, данных о местонахождении объектов, окружающих беспилотный автомобиль 1, в пространстве,
получения запретов на управление (пилотирование) беспилотным автомобилем 1 или управление его отдельными системами от блока диагностики 32,
получения от блока управления энергоустановкой 34 информации о энергопрофиле маршрута следования,
управления преобразователем 8 тягового электропривода 2 путем задания ему требуемой величины крутящего момента на ведущих колесах 7 беспилотного автомобиля 1, который создается электродвигателем 3 тягового электропривода 2 и приводом рабочей тормозной системы и стояночного тормоза 9
управления приводом рулевого механизма 26 беспилотного автомобиля 1
передачи данных в интерфейс ввода и отображения 31 для отображения информации о параметрах компонентов беспилотного автомобиля 1 и маршрута следования с целью информирования водителя/пассажира/оператора беспилотного автомобиля 1
4) блок управления энергоустановкой 34, представляющий собой микропроцессорное устройство, предназначенное для
получения исходных данных от блока диагностики 32 о маршруте следования беспилотного автомобиля 1, инфраструктурных объектах и данных о местонахождении объектов, окружающих беспилотный автомобиль 1 в пространстве, о параметрах тягового электропривода 2, аккумуляторной батареи 10, бортового зарядного устройства 12, вспомогательных агрегатов 28, привода рабочей тормозной системы и стояночного тормоза 9, привода рулевого механизма 26,
получения исходных данных о маршруте следования беспилотного автомобиля 1, задаваемых водителем/пассажиром/оператором беспилотного автомобиля 1 посредством интерфейса ввода и отображения 31, в том числе конечной точки маршрута следования беспилотного автомобиля 1, уровня заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, выбора возможности дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута, а также иных параметров следования и состояния беспилотного автомобиля 1,
расчета энергопрофиля маршрута (график величины крутящего момента на приводных колесах 7 в каждой точке маршрута следования) с учетом влияния внешних факторов на энергопотребление беспилотного транспортного средства при движении по маршруту и его передачу в блок пилотирования 33,
расчет оптимального управления бортовым зарядным устройством 12 с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 при движении по маршруту и передачу рассчитанных управляющих параметров в преобразователь 16 бортового зарядного устройства 12.
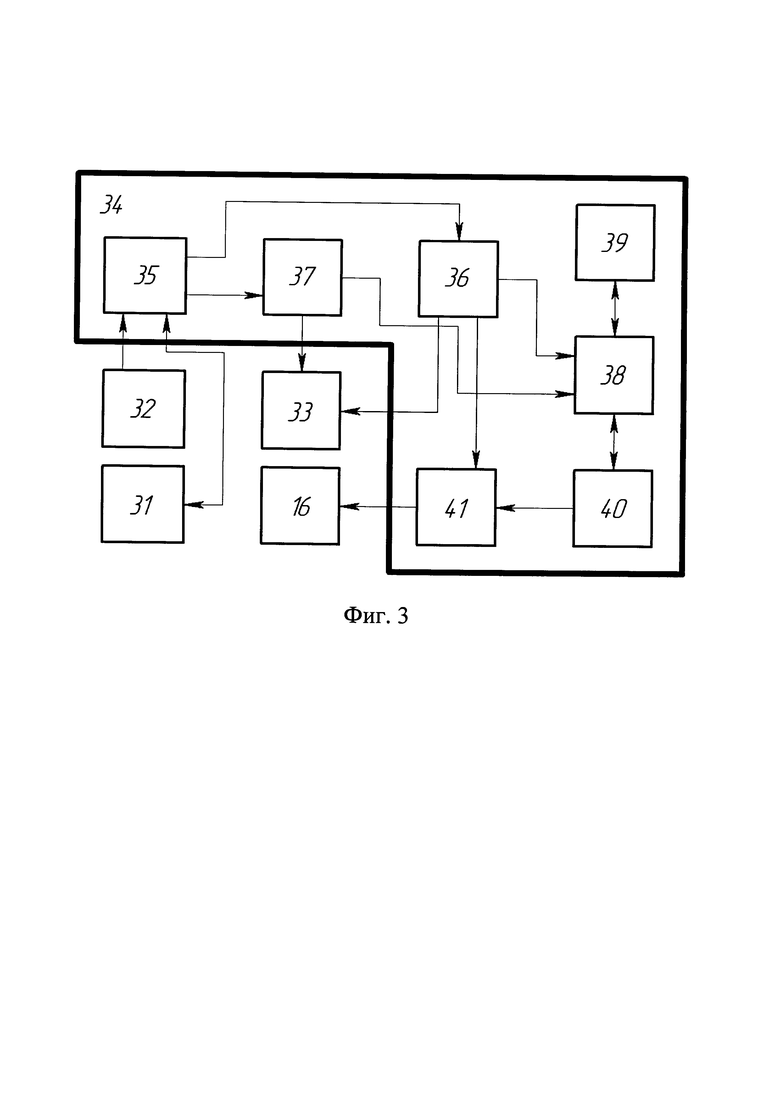
На фиг. 3 показано устройство блока управления энергоустановкой 34 беспилотного автомобиля 1, в состав которого входят
1) блок сбора и обработки данных 35, представляющий собой микропроцессорное устройство, предназначенное для
- получения от блока диагностики 32 информации о текущем состоянии всех компонентов беспилотного автомобиля 1, включая параметры тягового электропривода 2 (который также передает информацию от привода рабочей тормозной системы и стояночного тормоза 9), в том числе температуру электродвигателя 3 и преобразователя 8, аккумуляторной батареи 10, в том числе уровня ее заряда, бортового зарядного устройства 12, в том числе температуру генератора 13, двигателя 14 и преобразователя 16, частоту вращения вала генератора 13, угол открытия дроссельной заслонки двигателя 14, уровень топлива в топливном баке 15, электрические параметры преобразователя 21 устройства внешней подзарядки 19, параметры привода рулевого механизма 26, в том числе мощностные параметры и угол поворота управляемых колес 27, параметры вспомогательных агрегатов 28, в том числе потребляемая мощность, информации от прочих систем беспилотного автомобиля 1, в том числе давления в шинах, данных о загрузке автомобиля, его текущей скорости и пр.,
- информации о текущих координатах беспилотного автомобиля 1, информации о маршруте (маршрутных точках: рельеф, повороты, тип дорожного покрытия, экологические зоны и т.п.), данных о погодных условиях, трафике, авариях, ограничениях движения на маршруте из интернет ресурсов и от инфраструктурных объектов и других ТС, информацию об объектах, окружающих беспилотный автомобиль 1, в том числе расстояние до них,
- получения от интерфейса ввода и отображения 31 данных о планируемом маршруте следования беспилотного автомобиля 1, задаваемых водителем/пассажиром/оператором беспилотного автомобиля 1, в том числе конечной точки маршрута следования беспилотного автомобиля 1, уровня заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, выбора возможности дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута, а также иных параметров следования и состояния беспилотного автомобиля 1,
- прокладывания маршрута движения беспилотного автомобиля 1 с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 при движении по маршруту,
- расчет цикла движения беспилотного автомобиля 1 (график скорости движения беспилотного автомобиля 1 в каждой точке маршрута следования) с учетом влияния внешних факторов на скорость движения беспилотного автомобиля 1 при движении по маршруту,
- получения от блока диагностики 32 и обработку информации об ограничениях на пути следования беспилотного автомобиля 1 по маршруту и ее передачу в блок ограничений 36
2) блок ограничений 36, представляющий собой микропроцессорное устройство, предназначенное для
- на основе данных, полученных от блока сбора и обработки информации 35, наложения запретов на включение бортового зарядного устройства 12 в случаях, если при движении или остановках/стоянках беспилотного автомобиля 1 уровень топлива в топливном баке 15 меньше минимального допустимого значения, если уровень заряда аккумуляторной батареи 10 выше или равен максимально допустимому уровню, если в момент приближения к конечной точке маршрута уровень заряда аккумуляторной батареи 10 может оказаться выше значения, заданного оператором/водителем/пассажиром беспилотного автомобиля 1, если маршрут беспилотного автомобиля 1 проходит через экологические или иные зоны, в которых запрещена эксплуатация транспортных средств с работающими двигателями,
- наложения запретов на выключение бортового зарядного устройства 12 в случаях, если при движении или остановках/стоянках беспилотного автомобиля 1 уровень заряда аккумуляторной батареи 10 ниже или равен минимально допустимому уровню, если в момент приближения к конечной точке маршрута уровень заряда аккумуляторной батареи 10 может оказаться ниже значения, заданного оператором/водителем/пассажиром беспилотного автомобиля 1,
- наложения запретов/ограничений на рекуперативное торможение беспилотного автомобиля 1 тяговым электроприводом 2 при длительном движении беспилотного автомобиля 1 под уклон или в иных ситуациях, при которых существует вероятность превышения уровня заряда аккумуляторной батареи 10 выше максимально допустимого значения, и их передачи в блок пилотирования 33,
- наложения запретов на работу тягового электропривода 2 в случаях превышения текущих значений температуры обмоток электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также аккумуляторной батареи 10 выше предельно допустимых значений, записанных в его памяти, и в случае неисправности привода рабочей тормозной системы и стояночного тормоза 9,
- а также выставления приоритетов по управлению бортовым зарядным устройством 12, исходя из карты кпд двигателя 14 бортового зарядного устройства 12 и карты кпд аккумуляторной батареи 10, содержащихся в его памяти,
3) блок моделирования движения автомобиля 37, представляющий собой микропроцессорное устройство, предназначенное для
- расчета энергопрофиля маршрута (величины крутящего момента на приводных колесах 7 в каждой точке маршрута следования) с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 при движении по маршруту,
- передачи расчетных данных об энергопрофиле маршрута в блок пилотирования 33 и блок моделирования бортового зарядного устройства 38.
4) блок моделирования бортового зарядного устройства 38, представляющий собой микропроцессорное устройство, предназначенное для
расчета параметров работы бортового зарядного устройства 12, удовлетворяющих расчетному энергопрофилю маршрута, рассчитанному в блоке моделирования движения автомобиля 37, требуемому уровню заряда аккумуляторной батареи 10, выполнению ограничений на включение и выключение бортового зарядного устройства 12, накладываемых блоком ограничений 36, при движении беспилотного автомобиля 1 по заданному маршруту в зависимости от изменения внешних факторов, влияющих на энергопотребление беспилотного автомобиля 1,
5) блок моделирования аккумуляторной батареи 39, представляющий собой микропроцессорное устройство, предназначенное для
расчета параметров аккумуляторной батареи 10 по данным о расчетных параметрах работы бортового зарядного устройства 12, удовлетворяющих расчетному энергопрофилю маршрута и рассчитанных в блоке моделирования бортового зарядного устройства 38
6) блок расчета оптимальной мощности бортового зарядного устройства 40, представляющий собой микропроцессорное устройство, предназначенное для
расчета на основании параметров работы бортового зарядного устройства 12, полученных от блока моделирования бортового зарядного устройства 38, графика оптимальной мощности бортового зарядного устройства 12 при движении беспилотного автомобиля 1 по заданному маршруту, обеспечивающего уровень заряда аккумуляторной батареи 10 (SOC), гарантирующий работу тягового электропривода 2 по расчетному энергопрофилю маршрута, рассчитанному в блоке моделирования движения автомобиля 37, при минимальном путевом расходе топлива двигателем 14 бортового зарядного устройства 12,
7) блок формирования управляющих воздействий 41, представляющий собой микропроцессорное устройство, предназначенное для
определения значений управляющих параметров бортового зарядного устройства 12, обеспечивающих работу бортового зарядного устройства 12 по графику оптимальной мощности бортового зарядного устройства 12, рассчитанному блоком расчета оптимальной мощности бортового зарядного устройства 40, при движении беспилотного автомобиля 1 по заданному маршруту в части параметра управления двигателем 14, в качестве которого могут выступать угол открытия дроссельной заслонки, цикловая подача топлива или любой аналогичный параметр, отвечающий за изменение вырабатываемой двигателем 14 мощности, и параметра управления генератором 13, в качестве которого может выступать частота вращения ротора генератора 13 или любой другой параметр, отвечающий за изменение мощности генератора 13.
Система управления энергоустановкой гибридного автомобиля работает следующим образом:
Оператор/водитель/пассажир беспилотного автомобиля 1, активировав работу блока управления автомобилем 30 любым возможным способом, посредством интерфейса ввода и отображения 31 блока управления автомобилем 30, представляющего собой сенсорный (или кнопочный, или виртуальный, или расположенный вне транспортного средства - в центре управления перевозок, или любой другой) экран, вводит (в том числе дистанционно) данные о конечной точке маршрута следования беспилотного автомобиля 1, требуемом уровне заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, а также выбирает возможность, в случае ее наличия и необходимости, дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута, а также данные об иных параметров следования и состояния беспилотного автомобиля 1, которые затем поступают в блок диагностики 32.
Блок диагностики 32 блока управления автомобилем 30 одновременно с этим получает информацию о неисправностях и ошибках от преобразователя 8 тягового электропривода 2, аккумуляторной батареи 10, преобразователя 16 бортового зарядного устройства 12, от преобразователя 21 устройства внешней подзарядки 19, блока сенсорики 22, радио модуля 23, GPS модуля 24, модуля интернет связи 25, привода рулевого механизма 26, вспомогательных агрегатов 28, блока датчиков 29 и проводит диагностику работоспособности систем беспилотного автомобиля 1.
В случае обнаружения неполадок блок диагностики 32 передает информационное сообщение о неисправности или ошибке в конкретном компоненте или системе беспилотного автомобиля 1 на интерфейс ввода и отображения 31. В случае обнаружения критических неисправностей или ошибок в конкретном компоненте или системе беспилотного автомобиля 1 блок диагностики 32 накладывает запрет на работу неисправного компонента или системы, а также компонентов энергоустановки до устранения неисправности.
В случае штатной работы всех компонентов и систем беспилотного автомобиля 1 блок диагностики 32 передает в блок сбора и обработки информации 35 блока управления энергоустановкой 34 информацию о:
- текущих значениях температуры обмоток и частоты вращения ротора электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также параметров рабочей тормозной системы и стояночного тормоза 9 от преобразователя 8;
- текущих значениях степени зарядки и температуры аккумуляторной батареи 10;
- текущих значениях температуры обмоток и частоты вращения ротора генератора 13, температуры охлаждающей жидкости и угле открытия дроссельной заслонки (или цикловой подачи топлива, или любого аналогичного параметра, отвечающего за изменение вырабатываемой двигателем 14 мощности) двигателя 14, уровне топлива в топливном баке 15, температуры преобразователя 16 бортового зарядного устройства 12 от преобразователя 16 бортового зарядного устройства 12;
- текущих параметрах зарядки аккумуляторной батареи 10 от стационарной зарядной станции, подключенной к централизованной электросети, от преобразователя 21 устройства внешней подзарядки 19;
- расположении, расстоянии, форме и виде объектов, расположенных в непосредственной близости (до нескольких сотен метров) беспилотного автомобиля 1, а также о дорожной разметке и дорожных знаках от камер, радаров, лидаров и т.п. блока сенсорики 22;
- уточняющую информацию от инфраструктурных объектов дорожной сети (система V2I) и других транспортных средств (система V2V) о фактических параметрах маршрута (дорожные знаки, светофоры, ремонтные работы и т.п.), параметрах окружающей среды (от метеостанций), фактических параметрах трафика и ограничениях на пути следования в области вероятного построения маршрута следования беспилотного автомобиля 1, полученную от радио модуля 23;
- фактическом месте положения беспилотного автомобиля 1 от GPS, полученную модуля 24;
- параметрах маршрута (в том числе длине маршрута, уклоне дороги, типе дороги и дорожного покрытия, ожидаемой и максимальной скорости на каждом участке маршрута, сопротивлении поворотов), параметрах окружающей среды и погодных факторах (в том числе скорость и направление ветра, осадки и температура на каждом участке маршрута следования), о возможных ограничениях движения ТС (в том числе пробки, аварии и ремонтные работы), скорости движения транспортного потока (трафике), местах размещения стационарных зарядных станций, подключенных к централизованной электросети, в области вероятного построения маршрута следования беспилотного автомобиля 1, полученную от модуля интернет связи 25;
- угле поворота управляемых колес 27 от привода рулевого механизма 26;
- энергопотреблении вспомогательных агрегатов 28;
- текущей скорости и ускорении, давлении в шинах и загрузке беспилотного автомобиля 1, параметрах окружающей среды в непосредственной близости и в салоне беспилотного автомобиля 1, а также о других параметрах компонентов беспилотного автомобиля 1, кроме привода тормозной системы 9, блока сенсорики 22, привода рулевого управления 26, вспомогательных агрегатов 28 и энергоустановки беспилотного автомобиля 1, полученную от блока датчиков 29.
Одновременно с этим блок диагностики 32 передает в блок пилотирования 33 информацию о:
- фактическом месте положения беспилотного автомобиля 1, полученную от GPS модуля 24;
- текущих значениях температуры обмоток и частоты вращения ротора электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также параметров рабочей тормозной системы и стояночного тормоза 9, полученную от преобразователя 8;
- расположении, расстоянии, форме и виде объектов, расположенных в непосредственной близости (до нескольких сотен метров) беспилотного автомобиля 1, а также о дорожной разметке и дорожных знаках от камер, радаров, лидаров и т.п., полученную блока сенсорики 22;
- угле поворота управляемых колес 27, полученную от привода рулевого механизма 26.
Также блок сбора и обработки информации 35 блока управления энергоустановкой 34 получает от интерфейса ввода и отображения 31 блока управления автомобилем 30 данные о планируемом маршруте следования беспилотного автомобиля 1, задаваемые водителем/пассажиром/оператором беспилотного автомобиля 1, в том числе о конечной точке маршрута следования беспилотного автомобиля 1, уровне заряда (SOC) аккумуляторной батареи 10 к моменту прибытия беспилотного автомобиля 1 в конечную точку, выборе возможности дополнительной подзарядки аккумуляторной батареи 10 от стационарных зарядных устройств, включенных в сеть электроснабжения, через устройство внешней подзарядки 19 в промежуточных точках маршрута.
На основании данных, полученных от блока диагностики 32 и интерфейса ввода и отображения 31, блок сбора и обработки информации 35 блока управления энергоустановкой 34 прокладывает маршрут движения беспилотного автомобиля 1 с учетом влияния внешних факторов, в том числе ограничений, на перемещение беспилотного автомобиля 1 при движении к конечной точке маршрута.
Проложенный маршрут блок сбора и обработки информации 35 передает на интерфейс ввода и отображения 31 с целью визуализации перемещения беспилотного автомобиля 1 по маршруту для информирования водителя/пассажира/оператора.
Далее на основании сведений о построенном маршруте блок сбора и обработки информации 35 блока управления энергоустановкой 34 проводит расчет цикла движения беспилотного автомобиля 1 (график скорости движения беспилотного автомобиля 1 в каждой точке маршрута следования) с учетом влияния внешних факторов на скорость движения беспилотного автомобиля 1 при движении по маршруту.
После этого блок сбора и обработки информации 35 передает в блок моделирования движения автомобиля 37 информацию о:
- расчетном цикле движения беспилотного автомобиля 1 (график скорости движения беспилотного автомобиля 1 в каждой точке маршрута следования) с учетом влияния внешних факторов на скорость движения беспилотного автомобиля 1 при движении по маршруту;
- текущих значениях температуры обмоток и частоты вращения ротора электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также параметров рабочей тормозной системы и стояночного тормоза 9;
- текущих значениях степени зарядки и температуры аккумуляторной батареи 10;
- текущих значениях температуры обмоток и частоты вращения ротора генератора 13, температуры охлаждающей жидкости и угле открытия дроссельной заслонки (или цикловой подачи топлива, или любого аналогичного параметра, отвечающего за изменение вырабатываемой двигателем 14 мощности) двигателя 14, уровне топлива в топливном баке 15, температуры преобразователя 16 бортового зарядного устройства 12;
- текущих параметрах зарядки аккумуляторной батареи 10 от стационарной зарядной станции, подключенной к централизованной электросети;
- уточняющую информацию от инфраструктурных объектов дорожной сети (система V2I) и других транспортных средств (система V2V) о фактических параметрах маршрута (дорожные знаки, светофоры, ремонтные работы и т.п.), параметрах окружающей среды (от метеостанций), фактических параметрах трафика и ограничениях на пути следования в области вероятного построения маршрута следования беспилотного автомобиля 1;
- фактическом месте положения беспилотного автомобиля 1;
- погодных условиях, скорости движения транспортного потока (трафике), местах размещения стационарных зарядных станций, подключенных к централизованной электросети, возможных ограничениях (заторах, авариях) в области вероятного построения маршрута следования беспилотного автомобиля 1;
- энергопотреблении вспомогательных агрегатов 28;
- текущей скорости и ускорении, давлении в шинах и загрузке беспилотного автомобиля 1, параметрах окружающей среды в непосредственной близости и в салоне беспилотного автомобиля 1, а также о других параметрах компонентов беспилотного автомобиля 1, кроме привода тормозной системы 9, блока сенсорики 22, привода рулевого управления 26, вспомогательных агрегатов 28 и энергоустановки беспилотного автомобиля 1.
Одновременно с этим блок сбора и обработки информации 35 передает в блок ограничений 36 информацию о:
- текущих значениях температуры обмоток и частоты вращения ротора электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также параметров рабочей тормозной системы и стояночного тормоза 9 от преобразователя 8;
- текущих значениях степени зарядки и температуры аккумуляторной батареи 10;
- текущих значениях температуры обмоток и частоты вращения ротора генератора 13, температуры охлаждающей жидкости и угле открытия дроссельной заслонки (или цикловой подачи топлива, или любого аналогичного параметра, отвечающего за изменение вырабатываемой двигателем 14 мощности) двигателя 14, уровне топлива в топливном баке 15, температуры преобразователя 16 бортового зарядного устройства 12 от преобразователя 16 бортового зарядного устройства 12.
На основании полученных данных блок ограничений 36:
- налагает запрет на включение бортового зарядного устройства 12 в случаях, если при движении или остановках/стоянках беспилотного автомобиля 1 уровень топлива в топливном баке 15 меньше минимального допустимого значения, если уровень заряда аккумуляторной батареи 10 выше или равен максимально допустимому уровню, если в момент приближения к конечной точке маршрута уровень заряда аккумуляторной батареи 10 может оказаться выше значения, заданного оператором/водителем/пассажиром беспилотного автомобиля 1, если маршрут беспилотного автомобиля 1 проходит через экологические или иные зоны, в которых запрещена эксплуатация транспортных средств с работающими двигателями, при этом налагаемые запреты передаются в блок формирования управляющих воздействий 41, откуда затем поступают в преобразователь 16 бортового зарядного устройства 12, после чего работа бортового зарядного устройства 12 приостанавливается;
- налагает запрет на выключение бортового зарядного устройства 12 в случаях, если при движении или остановках/стоянках беспилотного автомобиля 1 уровень заряда аккумуляторной батареи 10 ниже или равен минимально допустимому уровню, если в момент приближения к конечной точке маршрута уровень заряда аккумуляторной батареи 10 может оказаться ниже значения, заданного оператором/водителем/пассажиром беспилотного автомобиля 1, при этом налагаемые запреты передаются в блок формирования управляющих воздействий 41, откуда затем поступают в преобразователь 16 бортового зарядного устройства 12, после чего работа бортового зарядного устройства 12 продолжается вне зависимости от прочих управляющих воздействий;
- налагает запрет/ограничение на рекуперативное торможение беспилотного автомобиля 1 тяговым электроприводом 2 при длительном движении беспилотного автомобиля 1 под уклон или в иных ситуациях, при которых существует вероятность превышения уровня заряда аккумуляторной батареи 10 выше максимально допустимого значения, при этом налагаемые запреты передаются в блок пилотирования 33, откуда затем поступают в преобразователь 8 тягового электропривода 2, который в свою очередь отключает работу электродвигателя 3 в режиме рекуперативного торможения беспилотного автомобиля 1 и активирует работу привода рабочей тормозной системы 9 для обеспечения требуемого замедления беспилотного автомобиля 1;
- налагает запрет на работу тягового электропривода 2 в случаях превышения текущих значений температуры обмоток электродвигателя 3 и преобразователя 8 тягового электропривода 2, а также аккумуляторной батареи 10 выше предельно допустимых значений, записанных в его памяти, и в случае неисправности привода рабочей тормозной системы и стояночного тормоза 9, при этом налагаемые запреты передаются в блок пилотирования 33, откуда затем поступают в преобразователь 8 тягового электропривода 2, который в свою очередь активирует остановку беспилотного автомобиля 1 путем совместного согласованного перевода электродвигателя 3 в режим рекуперативного торможения беспилотного автомобиля 1 и активации работы привода рабочей тормозной системы 9 для обеспечения требуемого замедления беспилотного автомобиля 1;
- выставляет приоритеты в блок моделирования бортового зарядного устройства 38 по управлению бортовым зарядным устройством 12 для его работы на режимах наибольшей эффективности двигателя 14 бортового зарядного устройства 12, а также для ограничения тока заряда аккумуляторной батареи 10, вырабатываемого генератором 13 бортового зарядного устройства 12, исходя из карты кпд аккумуляторной батареи 10 (в зависимости от температуры и уровня заряда аккумуляторной батареи 10), содержащихся в его памяти, с целью увеличения ресурса и повышения эффективности работы компонентов энергоустановки беспилотного автомобиля 1.
Блок моделирования движения автомобиля 37 на основании полученной от блока сбора и обработки информации 35 информации проводит расчет энергопрофиля маршрута (величины крутящего момента на приводных колесах 7 в каждой точке маршрута следования) с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 при движении по проложенному маршруту в соответствии с расчетным циклом движения беспилотного автомобиля 1.
Рассчитанный энергопрофиль маршрута с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 блок моделирования движения автомобиля 37 передает в блок пилотирования 33, который в свою очередь управляет преобразователем 8 тягового электропривода 2 путем задания ему требуемой величины крутящего момента на ведущих колесах 7 беспилотного автомобиля 1, создаваемого электродвигателем 3 тягового электропривода 2 и приводом рабочей тормозной системы и стояночного тормоза 9. Преобразователь 8 тягового электропривода 2 отвечает за формирование величины крутящего момента на ведущих колесах 7 путем управления электродвигателем 3 тягового электропривода 2 и приводом рабочей тормозной системы и стояночного тормоза 9 беспилотного автомобиля 1 в каждой точке маршрута в соответствии с рассчитанным энергопрофилем маршрута.
Одновременно с этим рассчитанный энергопрофиль маршрута с учетом влияния внешних факторов на энергопотребление беспилотного автомобиля 1 блок моделирования движения автомобиля 37 передает в блок моделирования бортового зарядного устройства 38.
Блок моделирования бортового зарядного устройства 38 проводит с одновременным уточнением данных в блоке моделирования аккумуляторной батареи 39 расчет множества комбинаций параметров работы бортового зарядного устройства 12, удовлетворяющих расчетному энергопрофилю маршрута, рассчитанному в блоке моделирования движения автомобиля 37, требуемому уровню заряда аккумуляторной батареи 10, выполнению ограничений на включение и выключение бортового зарядного устройства 12, накладываемых блоком ограничений 36, при движении беспилотного автомобиля 1 по заданному маршруту в зависимости от изменения внешних факторов, влияющих на энергопотребление беспилотного автомобиля 1. Полученные параметры работы бортового зарядного устройства 12, удовлетворяющих расчетному энергопрофилю маршрута, блок моделирования бортового зарядного устройства 38 передает в блок расчета оптимальной мощности бортового зарядного устройства 40.
Блок моделирования аккумуляторной батареи 39 в свою очередь проводит уточнение расчетных параметров аккумуляторной батареи 10 и расчетных параметров работы бортового зарядного устройства 12, удовлетворяющих расчетному энергопрофилю маршрута и рассчитанных в блоке моделирования бортового зарядного устройства 38, и передает полученные данные обратно в блок моделирования бортового зарядного устройства 38.
Блок расчета оптимальной мощности бортового зарядного устройства 40 на основании полученных от блока моделирования бортового зарядного устройства 38 множества комбинаций параметров работы бортового зарядного устройства 12, проводит расчет графика оптимальной мощности бортового зарядного устройства 12 при движении беспилотного автомобиля 1 по заданному маршруту, обеспечивающего уровень заряда аккумуляторной батареи 10, гарантирующий работу тягового электропривода 2 по расчетному энергопрофилю маршрута, рассчитанному в блоке моделирования движения автомобиля 37, при минимальном путевом расходе топлива двигателем 14 бортового зарядного устройства 12. При расчете графика оптимальной мощности бортового зарядного устройства 12 при движении беспилотного автомобиля 1 по заданному маршруту могут использоваться любые методы оптимального управления, в том числе вариационные исчисления, принцип максимума Понтрягина, метод динамического программирования и пр. Полученный в результате расчета график оптимальной мощности бортового зарядного устройства 12 при движении беспилотного автомобиля 1 по заданному маршруту блок расчета оптимальной мощности бортового зарядного устройства 40 передает в блок формирования управляющих воздействий 41.
Блок формирования управляющих воздействий 41 на основании полученного от блока расчета оптимальной мощности бортового зарядного устройства 40 графика оптимальной мощности бортового зарядного устройства 12 при движении беспилотного автомобиля 1 по заданному маршруту определяет значения управляющих параметров бортового зарядного устройства 12, обеспечивающих работу бортового зарядного устройства 12 по графику оптимальной мощности при движении беспилотного автомобиля 1 по заданному маршруту, в каждой точке маршрута в части параметра управления двигателем 14, в качестве которого могут выступать угол открытия дроссельной заслонки, цикловая подача топлива или любой аналогичный параметр, отвечающий за изменение вырабатываемой двигателем 14 мощности, и параметра управления генератором 13, в качестве которого может выступать частота вращения ротора генератора 13 или любой другой параметр, отвечающий за изменение мощности генератора 13. Полученные значения управляющих параметров блок формирования управляющих воздействий 41 передает в преобразователь 16 бортового зарядного устройства 12, который в свою очередь осуществляет управление генератором 13 и двигателем 14.
Процесс расчета энергетического профиля маршрута и определения управляющих параметров бортового зарядного устройства 12 происходит циклично при движении беспилотного автомобиля 1 по заданному маршруту с учетом обновления информации об изменении внешних факторов, оказывающих влияние на энергопотребление беспилотного автомобиля 1.
Таким образом, в процессе применения системы управления энергоустановкой беспилотного гибридного автомобиля, в которой реализованы алгоритмы предиктивного управления, основанные на учете влияния внешних факторов на энергопотребление беспилотного автомобиля с гибридной силовой установкой последовательного типа с возможностью внешней подзарядки при движении по заданному маршруту, основанного на максимальном использовании электроэнергии для заряда бортовой аккумуляторной батареи от стационарной централизованной электросети, наиболее эффективном использовании рекуперативной энергии торможения ТС, а также на выработке электроэнергии бортовым зарядным устройством на базе ДВС на оптимальных с точки зрения энергопотребления и ресурса компонентов энергоустановки режимах,
достигается повышении запаса хода беспилотных автомобилей с гибридной энергоустановкой, а также в увеличение ресурса компонентов этой энергоустановки и увеличении ресурса компонентов рабочей тормозной системы этого автомобиля.
Кроме того, достигается снижение экологического ущерба окружающей среде и снижение расхода топлива и электроэнергии на преодоление маршрута и, как следствие, на стоимость поездки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Система экстренного торможения для беспилотных автомобилей с электроприводом | 2019 |
|
RU2735186C1 |
| Система питания бортовой сети гибридного транспортного средства | 2019 |
|
RU2733889C1 |
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА И СОГЛАСУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2110418C1 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2002 |
|
RU2222096C2 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2222098C2 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2191709C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ХОДОМ | 1997 |
|
RU2110419C1 |
| КОМБИНИРОВАННАЯ (ГИБРИДНАЯ) ЭНЕРГОУСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА НА БАЗЕ МОТОР-ГЕНЕРАТОРНОЙ УСТАНОВКИ | 2008 |
|
RU2478047C2 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
Изобретение относится к транспортным средствам. Система управления энергоустановкой беспилотного гибридного автомобиля содержит блок управления автомобилем, включающий блок пилотирования, для управления тяговым электроприводом, рабочей и стояночной тормозной системами, рулевым механизмом автомобиля. Также имеется блок диагностики, детектирующий и предотвращающий аварийные режимы работы компонентов, и блок управления энергоустановкой, предназначенный для определения при помощи методов оптимального управления алгоритмов предиктивного управления бортовым зарядным устройством и тяговым электроприводом. Имеются режимы: определения и прокладывания оптимального с точки зрения увеличения запаса хода и ресурса компонентов энергоустановки и тормозной системы автомобиля маршрута, а также расчета цикла движения; расчета энергопрофиля маршрута; определения при помощи методов оптимального управления графика оптимальной мощности бортового зарядного устройства. Повышается запас хода. 1 з.п. ф-лы, 3 ил.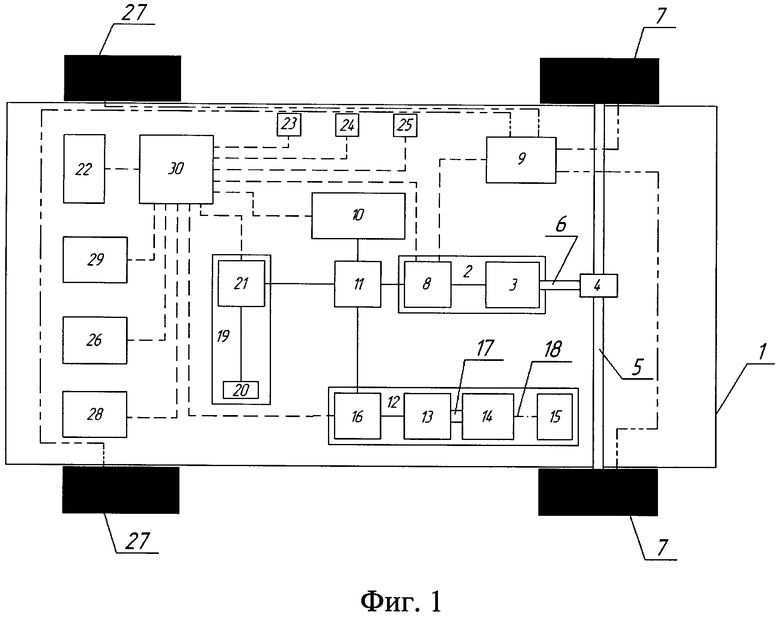
1. Система управления энергоустановкой беспилотного гибридного автомобиля, содержащая блок управления автомобилем, который непрерывно осуществляет управление бортовым зарядным устройством автомобиля с гибридной силовой установкой последовательного типа на основании прогнозируемой величины энергопотребления по маршруту движения автомобиля с учетом параметров маршрута, в том числе длины маршрута, уклона дороги, типа дороги, ожидаемой и максимальной скорости на каждом участке маршрута, получаемых по каналам связи от модуля интернет связи автомобиля, параметров и текущего состояния автомобиля, в том числе текущего уровня заряда аккумуляторной батареи и ее рабочего диапазона, передаваемых от аккумуляторной батареи, массогабаритных параметров ТС, записанных в блоке управления автомобилем, энергопотребления вспомогательных агрегатов и предпочтительных эффективных режимов работы бортового зарядного устройства, записанных в блоке управления автомобилем, а также задаваемых посредством интерфейса ввода и отображения, входящего в состав блока управления автомобилем, величины заряда аккумуляторной батареи в конце маршрута, возможности использования для зарядки аккумуляторной батареи электроэнергии из стационарного зарядного устройства в пункте назначения, ограничений на включение бортового зарядного устройства в зонах с нулевым выбросом и на подъезде к пункту назначения, отличающаяся тем, что блок управления автомобилем содержит блок пилотирования, предназначенный для управления тяговым электроприводом, рабочей и стояночной тормозной системами с целью обеспечения величины крутящего момента на ведущих колесах беспилотного гибридного автомобиля при движении по маршруту, соответствующего расчетному энергопрофилю маршрута, а также для управления приводом рулевого механизма беспилотного гибридного автомобиля, блок диагностики, предназначенный для детектирования и предотвращения аварийных режимов работы компонентов беспилотного гибридного автомобиля на основании полученной от всех датчиков, компонентов и систем беспилотного гибридного автомобиля информации путем наложения управляющих запретов на работу компонентов беспилотного гибридного автомобиля, блок управления энергоустановкой, предназначенный для определения при помощи методов оптимального управления алгоритмов предиктивного управления бортовым зарядным устройством и тяговым электроприводом, основанных на учете влияния внешних факторов на энергопотребление беспилотного автомобиля с гибридной силовой установкой последовательного типа с возможностью внешней подзарядки при движении по заданному маршруту, а также обеспечивающих максимальное использование электроэнергии для заряда бортовой аккумуляторной батареи от стационарной централизованной электросети, максимальное использование рекуперативной энергии торможения беспилотного гибридного автомобиля и выработку электроэнергии бортовым зарядным устройством на базе двигателя внутреннего сгорания на оптимальных с точки зрения энергопотребления и ресурса компонентов энергоустановки режимах:
- определения и прокладывания оптимального с точки зрения увеличения запаса хода и ресурса компонентов энергоустановки и рабочей тормозной системы беспилотного гибридного автомобиля маршрута, а также расчета цикла движения беспилотного гибридного автомобиля в виде графика скорости движения беспилотного гибридного автомобиля по всей длине проложенного маршрута блоком сбора и обработки данных, входящим в состав блока управления энергоустановкой,
- расчета на основании определенного цикла движения беспилотного гибридного автомобиля энергопрофиля маршрута в виде графика крутящего момента на приводных колесах по всей длине проложенного маршрута с учетом влияния внешних факторов на энергопотребление беспилотного гибридного автомобиля блоком моделирования движения автомобиля, входящим в состав блока управления энергоустановкой, который одновременно используется как для управления крутящим моментом на ведущих колесах в блоке пилотирования, входящим в состав блока управления автомобилем, так и для определения алгоритмов предиктивного управления бортовым зарядным устройством в блоке управления энергоустановкой,
- определения при помощи методов оптимального управления графика оптимальной мощности бортового зарядного устройства при движении беспилотного гибридного автомобиля по заданному маршруту, обеспечивающего уровень заряда аккумуляторной батареи, гарантирующий работу тягового электропривода по расчетному энергопрофилю маршрута,
- реализации оптимального управления бортовым зарядным устройством путем определения блоком формирования управляющих воздействий оптимальных значений управляющих параметров, обеспечивающих работу бортового зарядного устройства по графику оптимальной мощности,
при этом при реализации алгоритмов предиктивного управления бортовым зарядным устройством и тяговым электроприводом дополнительно учитываются такие параметры, как сопротивление при прохождении беспилотным гибридным автомобилем поворотов, погодные факторы, в том числе скорость и направление ветра, осадки и температура на каждом участке маршрута следования, информация об ограничениях движения беспилотного гибридного автомобиля по маршруту, в том числе пробки, аварии и ремонтные работы, данные от инфраструктурных объектов дорожной сети о фактических параметрах маршрута, окружающей среды и трафика на маршруте, данные от других транспортных средств о фактических параметрах трафика и ограничениях на пути следования беспилотного гибридного автомобиля по маршруту, наиболее предпочтительные параметры зарядного тока аккумуляторной батареи в зависимости от ее текущих параметров состояния, расположение стационарных зарядных станций, подключенных к централизованной электросети, для зарядки аккумуляторной батареи в промежуточных точках маршрута следования беспилотного гибридного автомобиля, глубина разряда аккумуляторной батареи, гарантирующая максимально эффективное использование кинетической энергии рекуперативного торможения беспилотного гибридного автомобиля для зарядки аккумуляторной батареи.
2. Система управления энергоустановкой беспилотного гибридного автомобиля по п. 1, отличающаяся тем, что интерфейс ввода и отображения может обеспечивать дистанционный ввод и отображение требуемых параметров маршрута.
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭНЕРГИЕЙ И СПОСОБ ЭКОНОМИИ ТОПЛИВА ДЛЯ ГИБРИДНОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2588392C1 |
| Приспособление к пневматическому молотку для сжимания склепываемых листов | 1932 |
|
SU31738A1 |
| СПОСОБ УПРАВЛЕНИЯ КОМБИНИРОВАННОЙ СИЛОВОЙ УСТАНОВКОЙ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2566320C1 |
| US 8996224 B1, 31.03.2015 | |||
| US 20170248963 A1, 31.08.2017 | |||
| DE 102010039653 A1, 23.02.2012. | |||

