Предлагаемое изобретение относится к радиолокации и может быть использовано для создания приемника радиолокационной системы (РЛС), использующей в качестве сигнала подсвета воздушных целей зондирующий радиосигнал наземного передатчика.
Известна бистатическая РЛС [1], состоящая из передатчика и приемника. Работа бистатической РЛС заключается в излучении передатчиком зондирующего радиосигнала, измерении расстояния до цели и направления на цель. Но в этой бистатической РЛС отсутствует возможность компенсации прямого зондирующего и отраженных от окружающих стационарных объектов радиосигналов, которые могут поступать в приемник в виде аддитивных сигналоподобных помех.
Для компенсации мешающих радиосигналов применяют пространственную селекцию полезных радиосигналов адаптивными антенными решетками с управляемыми «нулями» диаграммы направленности, формируемыми в направлениях на источники мешающих сигналов [2, 3].
Однако, если направление от приемника на воздушную цель близко к направлению на зондирующий или отраженный радиосигнал, то вместе с мешающими радиосигналами будет подавлен и радиосигнал, отраженный от воздушной цели.
Известно устройство обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью [4], состоящее из радиочастотного блока и двух каналов - канала прямого сигнала и канала рассеянного сигнала, квадратурного орреляционного приемника, устройства слежения за параметрами, радиочастотного блока, опорного генератора, устройства восстановления сигнала, запоминающего устройства, и вычитающего устройства.
В этом устройстве при приеме слабого рассеянного воздушной целью навигационного сигнала осуществляется компенсация мощного навигационного сигнала прямого распространения, играющего роль помехи. Для этого проводится запись в оперативную память входной реализации в виде смеси мощного прямого навигационного сигнала, слабого навигационного сигнала, рассеянного воздушной целью, и собственного шума приемника. Осуществляется слежение за навигационным сигналом прямого распространения с точной оценкой всех его параметров: задержки распространения, доплеровской частоты, начальной фазы, амплитуды. С использованием этих параметров формируется сигнал компенсации, который вычитается из запомненной входной реализации. Результатом вычитания будет приближенная оценка сигнала, отраженного от воздушной цели.
Основным недостатком этого устройства является необходимость получения точных оценок параметров всех мешающих сигналов: задержек, начальных фаз и амплитуд. Для получения оценок этих параметров используется двухканальный приемник, в каждом из каналов которого предусмотрены отдельные устройства слежения и оценки. Последние характеризуется ошибкой оценки параметров, а величина нескомпенсированного остатка будет зависеть от точности устройства слежения и оценки, а также количества и уровня лучей, образующих сигналоподобные помехи.
Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы из всех доступных источников не найдено.
Целью изобретения является создание устройства компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы, не требующее получения точных оценок параметров мешающих сигналов: задержек, начальных фаз и амплитуд.
Поставленная цель достигается тем, что устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы состоит из формирователя квадратурного радиолокационного сигнала, сумматора, устройства запоминания, блока оценки весового коэффициента, умножителя, согласованного фильтра, переключателя и управляющего устройства, которые имеют между собой следующие связи, выход формирователя квадратурного радиолокационного сигнала подключен к одному из входов переключателя, к другим входам переключателя подключены выход устройства запоминания и первый выход управляющего устройства, один из выходов переключателя подключен к одному из входов устройства запоминания, другой вход которого подключен ко второму выходу управляющего устройства, другой выход переключателя подключен к одному из входов сумматора и к одному из входов блока оценки весового коэффициента, третий выход подключен к другому входу блока оценки весового коэффициента и к одному из входов умножителя, в блоке весового коэффициента оценивается весовой коэффициент:
w(t+1)=(1-μ) w(t)+μy(t)×conj(u(t)),
где 0<μ<1, conj - операция комплексного сопряжения, w(0)=1, y(t) - сигнал на выходе формирователя квадратурного сигнала, подключаемый после записи копий прямого и отраженного от стационарного объекта радиолокационных сигналов, u(t) - сигнал, сформированный устройством запоминания квадратурной копии прямого и отраженного от стационарного объекта радиолокационного сигнала, выход блока оценки весового коэффициента подключен к другому входу умножителя, выход которого подключен к другому входу со знаком «минус» сумматора, выход сумматора подключен к входу согласованного фильтра, при этом вход формирователя квадратурного радиолокационного сигнала подключен к выходу фильтра промежуточной частоты приемника, а выход согласованного фильтра подключен к входу управляющего устройства и к устройству вторичной обработки радиолокационного сигнала приемника.
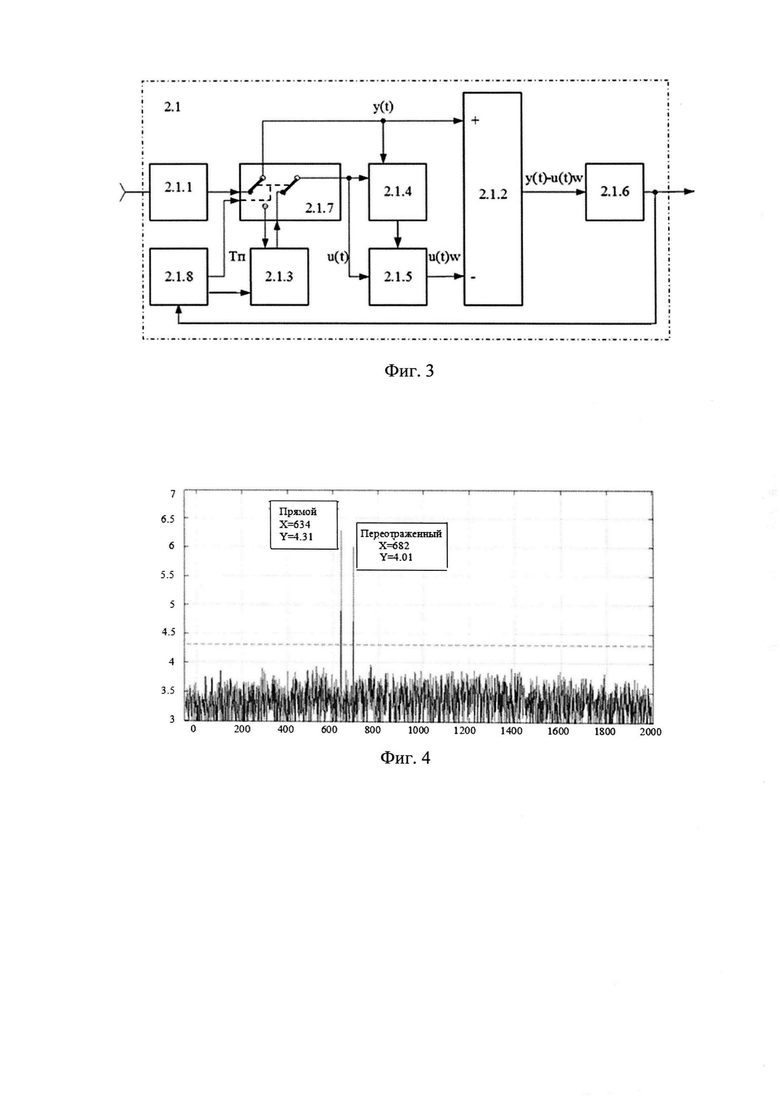
Сущность изобретения поясняется чертежами. На Фиг. 1 показана структурная схема бистатической радиолокационной системы, на Фиг. 2 показана структурная схема устройства компенсации радиолокационных сигналов прямого и многолучевого распространения, в которой переключатель установлен в режим запоминания прямого и отраженного сигналов, на Фиг. 3 приведена структурная схема устройства компенсации радиолокационных сигналов прямого и многолучевого распространения, в которой переключатель установлен в режим компенсации прямого и отраженного сигналов, на Фиг. 4 показан отклик согласованного фильтра на прямой и отраженный от стационарного объекта радиолокационный сигнал в отсутствии радиолокационного сигнала, отраженного от воздушной цели. На Фиг. 5 показан отклик согласованного фильтра на отраженный от воздушной цели радиолокационный сигнал при наличии прямого и отраженного от стационарного объекта радиолокационных сигналов без компенсации, на Фиг. 6 показан результат компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов на выходе сумматора устройства компенсации, на Фиг. 7 показан отклик радиолокационных сигналов остатка прямого, отраженного от стационарного объекта и отраженного от воздушной цели на выходе согласованного фильтра после компенсации.
Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы состоит из наземного радиопередатчика 1, наземного приемника 2.
В приемник 2 введено устройство компенсации 2.1 прямого и отраженного от стационарного объекта 4 радиолокационных сигналов (Фиг. 2), состоящее из формирователя квадратурного радиолокационного сигнала 2.1.1, сумматора 2.1.2, устройства запоминания 2.1.3, блока оценки весового коэффициента 2.1.4, умножителя 2.1.5, согласованного фильтра 2.1.6, переключателя 2.1.7 и управляющего устройства 2.1.8, которые имеют между собой следующие связи.
Выход формирователя квадратурного радиолокационного сигнала 2.1.1 подключен к входу переключателя 2.1.7, к другим входам переключателя 2.1.7 подключены выход устройства запоминания 2.1.3 и выход управляющего устройства 2.1.8. Один из выходов переключателя 2.1.7 подключен к входу устройства запоминания 2.1.3, другой выход которого подключен к одному из входов устройства запоминания 2.1.3, другой вход которого подключен ко второму выходу управляющего устройства 2.1.8, другой выход переключателя 2.1.7 подключен к одному из входов сумматора 2.1.2 и к одному из входов блока оценки весового коэффициента 2.1.4, третий выход подключен к другому входу блока оценки весового коэффициента 2.1.4 и к одному из входов умножителя 2.1.5. Выход блока оценки весового коэффициента 2.1.4 подключен к другому входу умножителя 2.1.5, выход которого подключен к другому входу со знаком «минус» сумматора 2.1.2. Выход сумматора 2.1.2 подключен к входу согласованного фильтра 2.1.6. При этом вход формирователя квадратурного радиолокационного сигнала 2.1.1 подключен к выходу фильтра промежуточной частоты приемника 2 (на Фиг. 2 не показано), а выход согласованного фильтра 2.1.6 подключен к входу управляющего устройства 2.1.8 и к устройству вторичной обработки радиолокационного сигнала приемника 2 (на Фиг. 2 не показано).
Формирователь квадратурного радиолокационного сигнала 2.1.1 осуществляет разделение входного радиосигнала на две квадратурные составляющие, в сумматоре 2.1.2 осуществляется вычисление (компенсация) прямого и отраженного радиосигналов из принимаемого радиосигнала, устройство запоминания 2.1.3 запоминает квадратурные копии прямого и отраженного от стационарного объекта радиолокационных сигналов, блок оценки весового коэффициента 2.1.4 осуществляет определение весового коэффициента, обеспечивающего компенсацию прямого и отраженного от стационарного объекта 4 радиолокационных сигналов, умножитель 2.1.5 осуществляет умножение смеси оценки прямого и отраженного от стационарного объекта 4 радиолокационных сигналов на весовой коэффициент, согласованный фильтр 2.1.6 выделяет взаимнокорреляционную функцию входного радиолокационного сигнала, переключатель 2.1.7 осуществляет переключения для записи квадратурной копии в запоминающем устройстве 2.1.3 и ее компенсации, управляющее устройство 2.1.8 осуществляет управление записью квадратурной копии в запоминающем устройстве 2.1.3 и ее компенсацией в сумматоре 2.1.2.
Включенный радиопередатчик 1 излучает радиолокационный сигнал, который до приемника 2 распространяется многолучево: прямолинейно, отражаясь от местного стационарного объекта 4 и отражаясь от воздушной цели 3, которая в этот момент может оказаться в зоне действия бистатической радиолокационной системы. На входе приемника 2 уровни сигнала прямого распространения и сигнала, отраженного от стационарного объекта 4, будут находиться выше уровня собственных шумов приемника 2 и значительно превышать уровень сигнала, отраженного от воздушной цели 3. При этом уровень сигнала, отраженного от воздушной цели 3, не будет превышать уровень собственных шумов приемника 2. Полученная смесь сигналов поступает на вход приемника 2, где обрабатывается, переносится на промежуточную частоту (на схеме не показано) и далее поступает на вход формирователя квадратурного радиолокационного сигнала 2.1.1 компенсатора 2.1.
При включении приемника переключатель 2.1.7 компенсатора 2.1 установлен в положение (Фиг. 2), при котором квадратурный сигнал y(t) с выхода формирователя квадратурного радиолокационного сигнала 2.1.1 поступает на суммирующий вход сумматора 2.1.2. На другой (вычитающий) вход сумматора 2.1.2. с выхода умножителя 2.1.5 сигналов не поступает, поскольку в устройстве запоминания 2.1.3 нет записи смеси радиолокационных сигналов и, соответственно, с его выхода ничего не поступает на входы блока оценки весового коэффициента 2.1.4 и умножителя 2.1.5. Сигнал y(t) через сумматор 2.1.2 без изменений подается на согласованный фильтр 2.1.6, настроенный на прием псевдослучайной последовательности передатчика 1 и формирующий на своем выходе взаимно корреляционную функцию принятого сигнала и псевдослучайной последовательности передатчика 1. В момент приема прямого сигнала передатчика 1 на выходе согласованного фильтра 2.1.6. сформируется отклик взаимно корреляционной функции, который поступает на вход управляющего устройства 2.1.8, синхронизируя его внутренний тактовый генератор.
По переднему фронту отклика взаимно корреляцинной функции на сигнал прямого распространения управляющее устройство 2.1.8 переводит переключатель 2.1.7 в положение «настройка», подключая выход формирователя 2.1.1 на вход устройства запоминания квадратурной копии 2.1.3 (Фиг. 3), а выход устройства запоминания 2.1.3 отключает от входа блока оценки весового коэффициента 2.1.4 и умножителя 2.1.5. При этом смесь радиолокационных сигналов записывается в устройство запоминания 2.1.3. Время запоминания отсчитывается по тактовым импульсам, поступающим из управляющего устройства 2.1.8, и равно tзап=Тпсп+τco, где Тпсп - длительность псевдослучайной последовательности, τсо - задержка сигнала, отраженного от самого удаленного местного стационарного объекта, относительно сигнала прямого распространения.
После запоминания смеси радиолокационных сигналов, т.е. по прошествии tзап, управляющее устройство 2.1.8 переводит переключатель 2.1.7 в режим «работа» (Фиг. 2). В этом режиме переключатель 2.1.7 подключает выход формирователя 2.1.1 к суммирующему входу сумматора 2.1.2 и к входу блока оценки весового коэффициента 2.1.4, а выход устройства запоминания 2.1.3 коммутирует на другой вход блока оценки весового коэффициента 2.1.4 и на вход умножителя 2.1.5.
При этом из приемника 2 на вход формирователя квадратурного сигнала 2.1.1 компенсатора 2.1 по-прежнему поступает смесь радиолокационных сигналов на промежуточной частоте. В формирователе квадратурного сигнала 2.1.1 формируется сигнал y(t), который через переключатель 2.1.7 передается в блок оценки весового коэффициента 2.1.4 и на суммирующий вход сумматора 2.1.2.
Устройство запоминания 2.1.3 формирует квадратурный сигнал u(t), представляющий собой копию смеси прямого и отраженного от стационарного объекта 4 радиолокационных сигналов на фоне собственных шумов приемника (при записи копии сигнал, отраженный от воздушной цели 3, был ниже уровня шумов приемника). По тактовым импульсам управляющего устройства 2.1.8, синхронизированным с радиолокационным сигналом прямого распространения, сигнал u(t) через переключатель 2.1.7 поступает в блок оценки весового коэффициента 2.1.4 и умножитель 2.1.5.
В блоке 2.1.4 весовой коэффициент оценивается следующим образом:
w(t)=(1-μ)w(t-1)+μy(t)×conj(u(t)),
где 0<μ<1 - коэффициент, влияющий на скорость и точность оценки весового коэффициента, conj - операция комплексного сопряжения, w(0)=1, y(t) - сигнал на выходе формирователя квадратурного сигнала 2.1.1 (смесь радиолокационных сигналов), u(t) - копия прямого и отраженного от стационарного объекта радиолокационных сигналов, сформированная на выходе устройства запоминания 2.1.3.
Полученный в блоке оценки весового коэффициента 2.1.4 весовой коэффициент w(t) поступает в умножитель 2.1.5, в который с устройства запоминания 2.1.3 поступает квадратурная копия u(t) суммы сигнала прямого распространения и сигнала, отраженного от стационарного объекта. Умножитель 2.1.5 формирует сигнал w(t)u(t), который поступает на вычитающий вход сумматора 2.1.2. Одновременно на суммирующий вход сумматора 2.1.2 подается сигнал y(t) с формирователя квадратурного сигнала 2.1.1. В сумматоре 2.1.2 формируется разностный сигнал y(t)-w(t)u(t), в котором компенсированы мощные сигнал прямого распространения и сигнал, отраженный от стационарного объекта. Разностный сигнал подается в согласованный фильтр 2.1.6. В согласованном фильтре 2.1.6 происходит формирование отклика на сумму прямого радиолокационного сигнала, радиолокационного сигнала отраженного от стационарного объекта 4, а также радиолокационного сигнала, отраженного от воздушной цели 3, который передается в устройство вторичной обработки радиолокационного сигнала приемника 2 (на Фиг. 1 не показано).
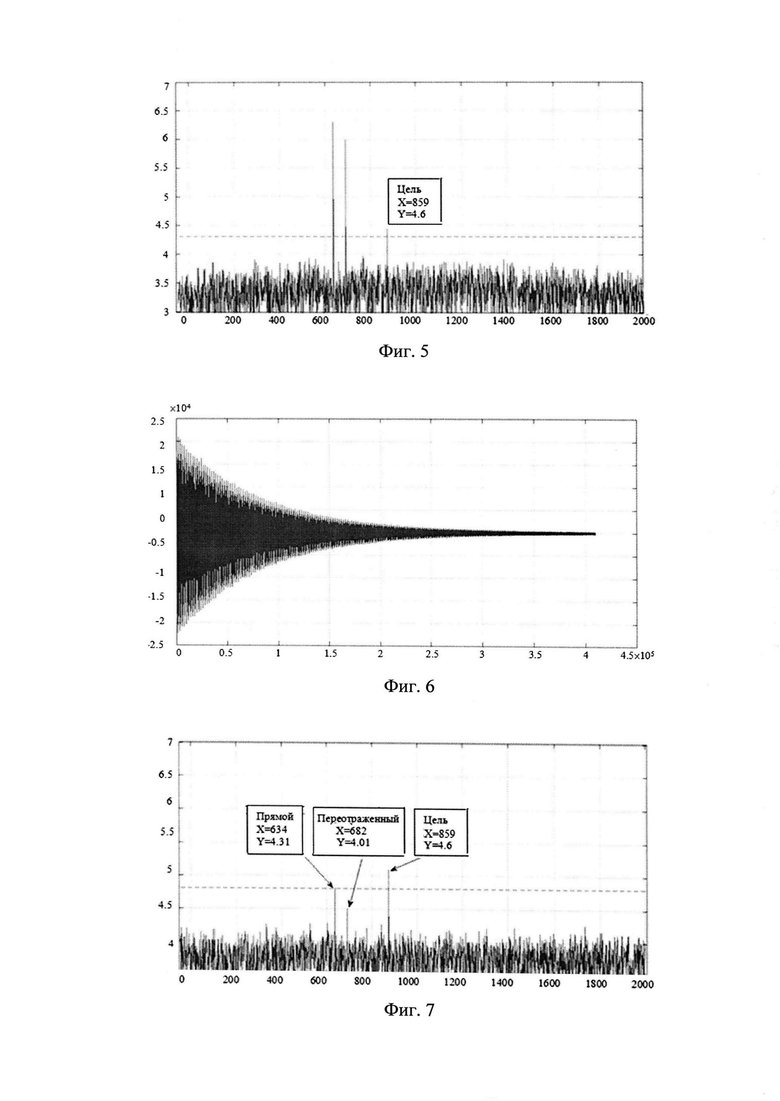
Для примера рассмотрим результаты ослабления предлагаемым компенсатором прямого радиолокационного сигнала и радиолокационного сигнала отраженного от стационарного объекта 4. В качестве зондирующего радиолокационного сигнала используем фазоманипулированный сигнал М-последовательности, с периодом повторения Тпсп, равным 100 мс. Амплитуда радиолокационного сигнала прямого распространения на входе устройства компенсации 2.1 равна 100. Амплитуда радиолокационного сигнала отраженного от стационарного объекта 4, равна 50. Амплитуда радиолокационного сигнала отраженного от воздушной цели 3, равна 2, что в 50 раз меньше амплитуды сигнала прямого распространения. Отраженный от воздушной цели 3 радиолокационный сигнал задержан относительно радиолокационного сигнала прямого распространения на 225 отсчетов, переотраженный радиолокационный сигнал от стационарного объекта 4 задержан на 48 отсчетов. Отношение прямого сигнала к шуму в канале 16 dB. Амплитуды квадратурных копий прямого радиолокационного сигнала и радиолокационного сигнала отраженного от стационарного объекта 4 на выходе устройства запоминания 2.1.3 составляют 100 и 50 соответственно. На Фиг. 3 в логарифмическом масштабе приведены отклики согласованного фильтра на сигналы прямого распространения и отраженного от объекта в отсутствии их компенсации.
На Фиг. 4 в логарифмическом масштабе приведены отклики согласованного фильтра 2.1.6 на радиолокационный сигнал, отраженный от воздушной цели 3, прямой и отраженный от стационарного объекта 4 радиолокационные сигналы без компенсации.
Из сравнения рисунков Фиг. 3 и Фиг. 4 видно, что пиковые значения отраженного от воздушной цели 3 радиолокационного сигнала отстают от пиковых значений радиолокационного сигнала прямого распространения на 225 отсчетов, а радиолокационного сигнала, переотраженного от стационарного объекта 4, на 48 отсчетов.
На Фиг. 5 приведены результаты компенсации прямого радиолокационного сигнала и радиолокационного сигнала, отраженного от стационарного объекта 4, на выходе сумматора 2.1.2 устройства компенсации 2.1 при μ=0.0002. Из этого рисунка видно, что уровни отраженного и прямого радиолокационных сигналов в процессе компенсации значительно уменьшается примерно через 4*10 отсчетов.
На Фиг. 6 в логарифмическом масштабе приведены отклики согласованного фильтра 2.1.6 на принятые радиолокационные сигналы после компенсации прямого радиолокационного сигнала и радиолокационного сигнала, отраженного от стационарного объекта 4. На этом рисунке просматриваются ослабленные отклики на прямой радиолокационный сигнал и радиолокационный сигнал, отраженный от стационарного объекта 4, а также отчетливо виден отклик на радиолокационный сигнал, отраженный от воздушной цели 3. При этом задержка пика радиолокационного сигнала, отраженного от воздушной цели 3, относительно радиолокационного сигнала прямого распространения составляет 225 отсчетов, а радиолокационного сигнала, отраженного от стационарного объекта 4 - на 48 отсчетов.
Таким образом, предложенное устройство компенсации прямого радиосигнала радиопередатчика и радиосигнала отраженного от стационарного объекта в приемнике 2 бистатической радиолокационной системы обеспечивает выделение слабого радиолокационного сигнала, рассеянного воздушной целью 3 и позволяет оценить время его задержки относительно радиолокационного сигнала, излучаемого радиопередатчиком 1. Аналогичным образом предложенное устройство может функционировать и при наличии отраженных радиосигналов от нескольких стационарных объектов.
Источники информации:
1. Ковалев Ф.Н. Кондратьев В.В. Особенности угломерно-дальномерного метода определения местоположения цели в просветных бистатических радиолокаторах. Журнал Радиоэлектроники: электронный журнал. №4, 2014.
2. Уидроу Б., Стирнз С. Адаптивная обработка сигналов: Пер. с англ. М.: Радио и связь. 1989. 440 с.
3. Гриффитс Л. Простой адаптивный алгоритм для обработки сигналов антенных решеток в реальном времени // ТИИЭР. 1969. Т. 57. №10. С. 6-14.
4. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95. Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство для его реализации / В.В. Кирюшкин, Д.А. Черепанов, А.А. Дисенов и др. 9 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы | 2019 |
|
RU2716154C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2568315C1 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ИНТЕГРАЛЬНОГО ПОКАЗАТЕЛЯ | 2017 |
|
RU2661749C1 |
| Система связи с широкополосным многочастотным сигналом в коротковолновом диапазоне частот | 2024 |
|
RU2824041C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПЛОДА И МАТЕРИ В АНТЕНАТАЛЬНЫЙ ПЕРИОД БЕРЕМЕННОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497445C1 |
| КАРМАННЫЙ ФОНАРЬ С РЕГУЛИРОВКОЙ ЯРКОСТИ (варианты) | 2020 |
|
RU2731208C1 |
| Автоматическая дистанционная система управления судовым дизелем | 1983 |
|
SU1125396A1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |

Изобретение относится к радиолокации и может быть использовано для создания приемника радиолокационной системы (РЛС), использующей в качестве сигнала подсвета воздушных целей зондирующий радиосигнал наземного передатчика. Технический результат - обеспечение возможности компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы, не требующее получения точных оценок параметров мешающих сигналов: задержек, начальных фаз и амплитуд. Устройство содержит формирователь квадратурного радиолокационного сигнала, сумматор, устройство запоминания, блок оценки весового коэффициента, умножитель, согласованный фильтр, переключатель и управляющее устройство. Данное устройство обеспечивает выделение слабого радиолокационного сигнала, рассеянного воздушной целью, и позволяет оценить время его задержки относительно радиолокационного сигнала, излучаемого радиопередатчиком. Аналогичным образом данное устройство может функционировать и при наличии отраженных радиосигналов от нескольких стационарных объектов. 7 ил.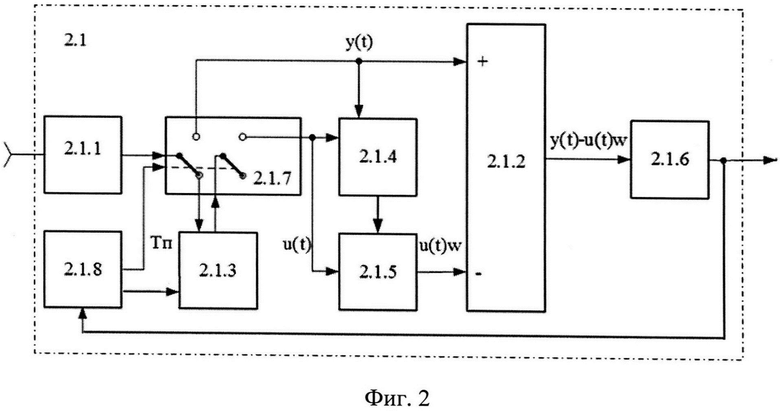
Устройство компенсации прямого и отраженного от стационарного объекта радиолокационных сигналов радиопередатчика в приемнике бистатической радиолокационной системы, состоящее из формирователя квадратурного радиолокационного сигнала, сумматора, устройства запоминания, блока оценки весового коэффициента, умножителя, согласованного фильтра, переключателя и управляющего устройства, которые имеют между собой следующие связи, выход формирователя квадратурного радиолокационного сигнала подключен к входу переключателя, к другим входам переключателя подключены выход устройства запоминания и выход управляющего устройства, один из выходов переключателя подключен к входу устройства запоминания, другой выход которого подключен к одному из входов устройства запоминания, другой вход которого подключен ко второму выходу управляющего устройства, другой выход переключателя подключен к одному из входов сумматора и к одному из входов блока оценки весового коэффициента, третий выход подключен к другому входу блока оценки весового коэффициента и к одному из входов умножителя, выход блока оценки весового коэффициента подключен к другому входу умножителя, выход которого подключен к другому входу со знаком «минус» сумматора, выход которого подключен к входу согласованного фильтра, при этом вход формирователя квадратурного радиолокационного сигнала подключен к выходу фильтра промежуточной частоты приемника, а выход согласованного фильтра подключен к входу управляющего устройства и к устройству вторичной обработки радиолокационного сигнала приемника.
| СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАДИОНАВИГАЦИОННЫХ ПАРАМЕТРОВ СИГНАЛА КОСМИЧЕСКОЙ СИСТЕМЫ НАВИГАЦИИ, РАССЕЯННОГО ВОЗДУШНОЙ ЦЕЛЬЮ, И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2591052C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ | 2008 |
|
RU2402038C2 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| Реактор для гомогенного пиролиза углеводородов | 1961 |
|
SU144831A1 |
| СПОСОБ СЛОЖНОСОСТАВНОЙ ОПТИМАЛЬНОЙ ФИЛЬТРАЦИИ ДЛЯ ОБНАРУЖЕНИЯ СЛАБЫХ СИГНАЛОВ | 2012 |
|
RU2518443C2 |
| US 7397417 B2, 08.07.2008. | |||

