ПРИОРИТЕТ
Настоящая заявка испрашивает приоритет по предварительной патентной заявке США №62/254737, поданной 13 ноября 2015 г., и предварительной патентной заявке США №62/349,981, поданной 14 июня 2016 г. Содержание каждой из указанных заявок включено во всей полноте в настоящую заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Предотвращение или лечение бактериальных, вирусных и грибковых инфекций и других заболеваний, как правило, осуществляют путем вакцинации или доставки лекарственного средства субъекту. Для всех животных, в частности, позвоночных или рыб, а также для беспозвоночных, таких как ракообразные, доставку вакцин, биологических препаратов и других лекарственных средств, как правило, осуществляют с целью предотвращения заболевания и гибели или с целью поддержания общего удовлетворительного состояния здоровья. Во многих животноводческих и рыбных хозяйствах обеспечение эффективного лечения всех животных является трудной задачей. Количество и вариабельность размеров субъектов приводят к затруднениям при вакцинации и доставке других лекарственных средств каждому из субъектов.
В частности, в контексте промышленного птицеводства, известен ряд современных способов, посредством которых осуществляют лечение оплодотворенных яиц или куриц лекарственными средствами. Указанные способы включают:
1) автоматизированную вакцинацию в инкубатории, выполняемую "in ovo" ("в яйцо") на 18 или 19 сутки;
2) автоматизированную вакцинацию путем массового распыления в инкубатории, выполняемую после вылупления;
3) ручную вакцинацию путем инъекции в инкубатории, выполняемую после вылупления;
4) добавление вакцины или лекарственного средства в корм или питьевую воду в помещении для выращивания; и
5) доставку вакцины или лекарственного средства путем опрыскивания цыплят вручную или посредством массовых распылителей.
Несмотря на то, что в промышленном птицеводстве на вакцины и другие фармацевтические средства ежегодно уходит свыше 3 млн. долларов, окупаемость подобных затрат не гарантирована вследствие проблем, связанных со способами доставки вакцин или других веществ. Каждый из вышеуказанных способов обладает заметными и значительными недостатками. Во-первых, широкой популярностью пользуется автоматизированная вакцинация "в яйцо", осуществляемая в инкубатории на 18 или 19 сутки. Однако указанная система обладает недостатками. В частности, многие из значимых вакцин недоступны или не могут быть доступны для ввода "в яйцо" вследствие природы заболевания и/или конъюгаты, необходимые для переноса активных молекул/частиц, не могут быть применены при вводе "в яйцо". Кроме того, существующая практика вакцинации "в яйцо" требует пробития или прокалывания отверстия в яйце на 18 или 19 сутки. Указанный способ доставки требует удержания яйца на месте посредством каких-либо механических средств с одновременным вводом иглы в яйцо и осуществлением введения вакцины или лекарственного средства. Указанная практика может способствовать проникновению в яйцо патогенов и бактерий, способных оказывать отрицательное воздействие на эмбрион. В ходе вакцинации "в яйцо" нежелательные яйца (протухшие яйца или яйца, содержащие мертвые эмбрионы) также находятся в контакте с механическими средствами удержания яиц в неподвижном состоянии перед пробитием или прокалыванием отверстия и вводом иглы. Таким образом, существует высокая вероятность распространения нежелательного загрязнения в другие яйца и в систему вакцинации. Соответственно, существует вероятность переноса загрязнения в последующие живые яйца в ходе дальнейшей обработки.
В целях снижения воздействия от указанного переноса загрязнения, в промышленности стали прибегать к внедрению и вводу антибиотиков в яйца в ходе вакцинации "в яйцо". Однако потребители в настоящее время стремятся не приобретать птицу, обработанную антибиотиками. Соответственно, в промышленности существует необходимость в поиске альтернативных способов лечения известных заболеваний другим образом, позволяющим сохранять удовлетворительное состояние здоровья поголовья без использования антибиотиков.
Несмотря на то, что ручную вакцинацию в инкубатории после вылупления можно считать более надежной по сравнению с другими способами, исследования показали, что указанная практика также недостаточно надежна, не обладает достаточной повторяемостью и приводит к травмам и смертности среди цыплят. Производства сталкиваются с проблемами при поиске надежных вакцинаторов, а рост суточной выработки дополнительно усугубляет указанную проблему. В свою очередь, указанный рост приводит к обострению проблемы обеспечения эффективной вакцинации всех цыплят, дополнительно повышающей общие затраты. Кроме того, вследствие необходимости ручного обращения с цыплятами в ходе вакцинации существует риск нанесения повреждений или смерти цыпленка в случае нанесения ему повреждений в ходе ручного обращения. Далее, вследствие необходимости вакцинации множества цыплят работники подвержены риску травм, связанных с повторяющейся нагрузкой. Это приводит к экономическим потерям и потерям производительности птицеводческих предприятий.
Известен альтернативный подход, заключающийся в добавлении вакцины или лекарственного средства в корм или питьевую воду в помещении для выращивания. Указанная методика обладает лишь частичной эффективностью вследствие того, что бактерии, патогены и паразиты в пищеварительной системе цыпленка по большей части приобрели резистентность к лекарственным средствам. Другие факторы, обуславливающие частичную эффективность указанного способа включают отсутствие единообразия питьевых линий, доставку неравномерных доз вследствие неравномерного объема поглощенного корма или воды, и тот факт, что некоторые вакцины крайне быстро теряют эффективность в воде или корме.
В контексте рыбоводства следует отметить, что масштабы потребления рыбы в пищу человеком неуклонно растут. Состояние океанов, рек и озер таково, что рыбоводство представляет собой более надежный источник потребляемой рыбы. Тем не менее, рыбоводческие фермы или рыбопитомники сталкиваются с проблемами сохранения здоровья всего поголовья, сходными с испытываемыми в промышленном птицеводстве.
В рыбопитомниках рыбу выращивают из икры, причем рыбу сходного возраста размещают в общих резервуарах. В крупных резервуарах размещают большое число рыб, обеспечиваемых кормом для роста. Размещение большого числа рыб в тесной близости в общем резервуаре может приводить к быстрому распространению заболевания, приводящему к значительным экономическим последствиям.
Зачастую любые вакцины, лекарственные и противопаразитарные средства могут быть доставлены путем применения растворов в рыбных резервуарах или кормах для рыб. Однако вышуказанные способы не могут обеспечивать лечение некоторых состояний или заболеваний. В подобных случаях необходимы индивидуальное введение вакцин и других биологических препаратов каждой из рыб. Существующие способы введения рыбам требуют лишения рыб корма в течение некоторого промежутка времени с последующей седацией рыбы перед выполнением указанной операции. Голодную и подвергнутую седации рыбу затем перемещают с использованием механических средств и осуществляют ручное или автоматическое введение с использованием ручных или механических средств позиционирования. Рыба с трудом переносит указанные операции, что приводит к повышению смертности и значительным экономическим затратам.
Сходным образом, во многих фермерских животноводческих хозяйствах обеспечение эффективного лечения всех животных является насущной трудоемкой задачей. Количество и вариабельность размеров субъектов приводят к затруднениям при вакцинации и доставке других лекарственных средств каждому из субъектов.
В контексте свиноводства имеют место сходные проблемы, связанные с вакцинацией или другим лечением всех поросят какой-либо фермы. Важно обеспечить эффективное лечение каждого из поросят, т.к. в противном случае больной поросенок может инфицировать все поголовье фермы с катастрофическими экономическими последствиями.
В свиноводстве существуют некоторые вакцины и лекарственные средства, предпочтительно доставляемые посредством носовой полости. Однако эффективная доставка может быть проблематичной вследствие того, что молодых поросят сложно зафиксировать в неподвижном состоянии в течение промежутка времени, достаточного для доставки эффективной дозы, а движение поросенка в ходе доставки может приводить к повреждению носового хряща или мозга поросенка.
Вне зависимости от участка или принципа доставки вакцин и лекарственных средств, доказана недостаточная эффективность существующих способов в некоторых важных областях применения. Неспособность эффективной доставки лекарственных средств или вакцинации всех животных или рыб в более крупной популяции может приводить к вспышкам заболеваний и значительным экономическим потерям. Вышеуказанные недостатки вкупе с последними тенденциями рынка в сторону устранения использования антибиотиков в животноводстве и рыбоводстве, включая корм с добавлением медицинских препаратов, являются основными предпосылками к созданию раскрытых в настоящем описании вариантов реализации изобретения. Задача при массовой доставке заключается в обеспечении получения эффективной дозы каждым животным.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Раскрытые в настоящем описании варианты реализации изобретения относятся к системе автоматической доставки вещества на заданный участок животного. Система содержит сенсорное устройство для обнаружения относительного положения заданного участка доставки на животном и устройство позиционирования, позиционирующее отдельное животное по отдельности. Система также содержит устройство захвата изображения для захвата по меньшей мере одного изображения относительного положения заданного участка доставки на животного и систему доставки для доставки заданной дозы вещества на заданный участок доставки животного. Система также содержит системный контроллер, связанный с сенсорным устройством, устройством позиционирования, устройством захвата изображения и системой доставки. При обнаружении сенсорным устройством местоположения или положения животного и сообщения указанных данных системному контроллеру, системный контроллер обрабатывает изображение, определяет местоположение заданного участка и осуществляет позиционную регулировку системы доставки для доставки вещества на заданный участок доставки на животном.
В одном из аспектов изобретение также относится к системе для автоматической доставки вещества на заданный участок рыбы, содержащей: первый резервуар для содержания по меньшей мере одной рыбы, имеющей заданный участок доставки; второй резервуар для размещения о меньшей мере одной рыбы; резервуар удерживания, в который обеспечена возможность перемещения рыбы на пути из первого резервуара во второй резервуар; удерживающее устройство, выполненное с возможностью удержания рыбы по отдельности; устройство захвата изображения для захвата по меньшей мере одного изображения относительного положения заданного участка доставки на рыбе; выполненную с возможностью позиционной регулировки систему доставки для доставки заданной дозы вещества на заданный участок доставки на рыбе и системный контроллер, связанный с удерживающим устройством, устройством захвата изображения и системой доставки.
В одном из вариантов осуществления системе для автоматической доставки вещества на заданный участок рыбы также содержит датчик присутствия для обнаружения присутствия рыбы в резервуаре удерживания.
В соответствии с одним из вариантов осуществления настоящего изобретения, система доставки представляет собой впрыскиватель, при этом впрыскиватель может быть безыгольным.
В соответствии ещё с одним вариантом осуществления изобретения, система доставки представляет собой систему для введения, а система для введения может быть выполнена безыгольной.
Cогласно различным вариантам осуществления настоящего изобретения, вещество предназначено для лечения одного или более из следующего: болезни Ньюкасла, инфекционного бронхита, кокцидиоза или колибактериоза.
В одном из вариантов осуществления удерживающее устройство расположено в резервуаре удерживания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вслед за вышеприведенным общим описанием различных вариантов реализации настоящего изобретения, нижеприведенное подробное описание выполнено со ссылкой на сопутствующие чертежи, выполненные без соблюдения масштаба и не содержащие всех компонентов системы, на которых:
На фиг. 1 показан схематичный вид сверху первого варианта реализации;
На фиг. 2 показан схематичный вид сбоку варианта реализации по фиг. 1;
На фиг. 3 показан частичный увеличенный вид сбоку части варианта реализации по фиг. 1 в ходе использования;
На фиг. 4 показан частичный увеличенный вид в перспективе варианта реализации по фиг. 1 в ходе использования;
На фиг. 5 приведено схематичное отображение взаимодействия некоторых компонентов первого варианта реализации;
На фиг. 6 показан вид сверху второго варианта реализации в ходе использования;
На фиг. 7 показан увеличенный частичный вид сбоку второго варианта реализации по фиг. 6;
На фиг. 8 показан частичный увеличенный вид сбоку устройства для введения по второму варианта реализации;
На фиг. 9 приведено схематичное отображение взаимодействия некоторых компонентов второго варианта реализации;
На фиг. 10 показан вид спереди третьего варианта реализации;
На фиг. 11 показан увеличенный частичный вид варианта реализации по фиг. 10;
На фиг. 12 показан вид в сечении варианта реализации по фиг. 11, причем сечение выполнено по линии А-А;
На фиг. 13 показан вид спереди варианта реализации по фиг. 10 с подробным изображением системы для введения;
На фиг. 14 показан вид в сечении варианта реализации по фиг. 13;
На фиг. 15 приведено схематичное отображение взаимодействия некоторых компонентов третьего варианта реализации;
На фиг. 16 показан вид спереди четвертого варианта реализации; и
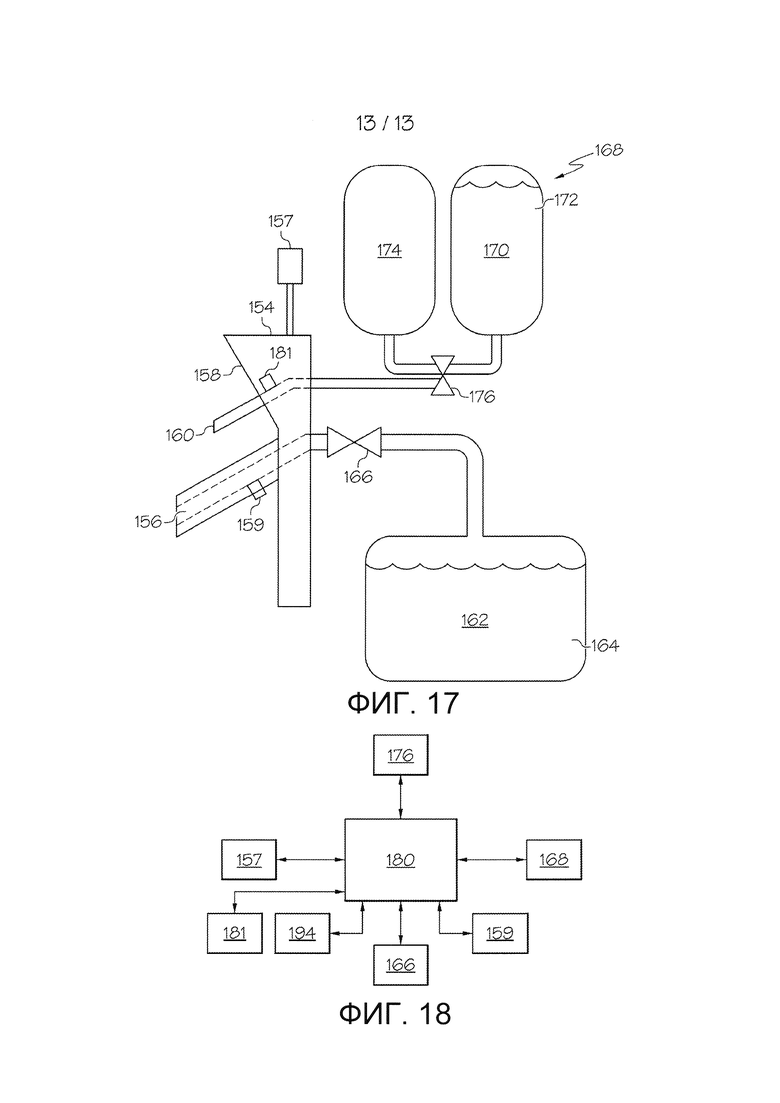
На фиг. 17 показан увеличенный подробный вид части варианта реализации по фиг. 16.
На фиг. 18 приведено схематичное отображение взаимодействия некоторых компонентов четвертого варианта реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к автоматизированным системам и способам эффективной доставки вещества животному. Различные аспекты настоящего изобретения более подробно описаны в нижеприведенном описании со ссылкой на сопутствующие чертежи, на которых показаны некоторые, но не все, аспекты настоящего изобретения. Настоящее изобретение может быть реализовано в виде широкого ряда различных форм и не призвано быть ограниченным аспектами, раскрытыми в настоящем описании.
Один из вариантов реализации относится к доставке вещества множеству новорожденных цыплят после их отделения от скорлупы и до выведения из инкубатория. Кроме того, способы и системы согласно аспектам настоящего изобретения, относящиеся к цыплятам, могут быть использованы с птицей любого вида, без ограничения включая кур, индеек, уток, гусей, перепелов, фазанов и экзотических птиц и т.д.
Другой пример реализации направлен на обеспечение доставки вещества крупному рогатому скоту. Однако способы и системы по различным аспектам настоящего изобретения, могут быть использованы с сельскохозяйственными животными любого вида, без ограничения включая бизонов, свиней, коз, овец, лошадей и т.д. Другой пример реализации направлен на обеспечение доставки вещества рыбе. Предусмотрена возможность использования способов и систем по различным аспектам настоящего изобретения с рыбой, моллюсками или ракообразными любого вида, без ограничения включая искусственно выращиваемую рыбу, такую как треска, форель, лосось, тиляпия, а также креветок, омаров, морских гребешков, устриц, мидий, раков и т.д. Еще один варианта реализации относится к доставке вещества свиньям. На различных чертежах сходные элементы обозначены сходными позициями.
На фиг. 1 показан вид сверху всей системы первого варианта 10 реализации. На фиг. 2 показан вид сбоку системы по фиг. 1. Первый вариант 10 реализации наиболее вероятно расположен в суточном помещении куриного инкубатория. Сепаратор 12 цыпленка и скорлупы обеспечивает средства отделения новорожденного цыпленка от скорлупы его яйца. Первый конвейер 14 перемещает цыпленка от сепаратора 12 цыпленка и скорлупы сквозь отверстие в разделительной стенке 16 на второй, более широкий, конвейер 18. Разделительная стенка 16 отделяет процесс вылупления от процесса доставки вещества.
На втором, более широком, конвейере 18 начинают рассредоточение цыплят, облегчающее обработку каждого отдельного цыпленка. Со второго конвейера 18 цыплят переносят на третий и четвертый конвейеры 20, 22, причем указанные конвейеры шире второго конвейера. Согласно фиг. 1, пятый конвейер 24 содержит разделители 26, которые могут быть подвешены на потолке узла транспортировки. Разделители 26 содействуют перемещению цыплят в узкие ряды, которые постепенно преобразуются в ряды по одному.
Шестой конвейер 28 содержит разделители 26, удерживающие цыплят в рядах по одному, сформированных на пятом конвейере 24. Шестой конвейер 28 перемещает одиночные ряды цыплят, разделенные разделителями 26, на ряд сходно соответствующих наклонных конвейерных лент 30.
Ниже наклонной конвейерной ленты расположены индивидуальные устройства-носители 32. Каждое из индивидуальных устройств-носителей 32 выполнено сходным с чашей или корзиной и имеет размеры, позволяющие разместить в нем одного цыпленка 13 согласно фиг. 3. Индивидуальные устройства-носители 32 связаны друг с другом и перемещаются по пути индивидуальных носителей посредством конвейерной системы. Каждое устройство-носитель 32 шарнирно установлено относительно конвейерной системы, в результате чего каждое устройство может быть повернуто или может вращаться вокруг своего шарнирного соединения. Угол поворота может быть ограничен с целью предотвращения выпадения цыпленка 13 из устройства 32.
Первый вариант 10 реализации также содержит систему 42 для введения (фиг. 4). Система 42 для введения содержит головку 44 для введения, емкость 47 вещества и источник 48 газа под давлением и механизм 50 активизации, как показано на фиг. 4. Газ под давлением может быть доставлен в систему 42 для введения посредством капсул предварительно сжатого газа или, в другом варианте, посредством газопровода, связанного с централизованным компрессором.
Механизм 50 активизации связан с системным контроллером 38 (фиг. 4). Механизм 50 активизации активизирует газ под давлением и вещество с целью доставки заданной дозы цыпленку 13. Емкость 47 вещества может содержать вакцину, лекарственное средство или биологический препарат, предназначенные для введения в цыпленка 13.
Система 42 для введения и камера 36 установлены под конвейерной системой 34 устройств-носителей на движущейся платформе 45 системы для введения (фиг. 4). Система для введения осуществляет эффективную доставку инъекции в заднюю часть цыпленка 13. Соответственно, система для введения предназначена для введения инъекции лишь цыплятам 13, сидящим в вертикальном положении в устройстве-носителе 32. Движущаяся платформа 45 системы для введения прилегает и проходит параллельно относительно конвейерной системы 34 устройств-носителей с равной скоростью. Указанная конфигурация обеспечивает возможность захвата изображения цыпленка 13 в устройстве-носителе 32 в ходе его перемещения посредством камеры 36. Указанная конфигурация также обеспечивает возможность работы системы 42 для введения в ходе перемещения цыпленка 13 в устройстве-носителе 32 согласно нижеприведенному более подробному описанию.
Система 40 управления конвейерами управляет скоростью и работой всех конвейерных лент. Системный контроллер 38 связан с камерой 36, системой 40 управления конвейерами и системой 42 для введения согласно схематичной иллюстрации на фиг. 5. Системный контроллер 38 содержит компьютерный процессор и процессор обработки изображений. Процессор обработки изображений получает изображения от камеры 36 и обрабатывает их. Системный контроллер 38 связан со всеми датчиками, камерами, конвейерами, приводами и устройствами ввода-вывода (приемниками и драйверами ввода-вывода) всей системы. Системный контроллер синхронизирует все действия системы и выполняет функцию мозга системы. Устройства ввода-вывода активизируют и деактивируют компоненты, а системный контроллер получает информацию от компьютерного процессора и процессора обработки изображений и активизирует конкретную распылительную головку.
Ниже индивидуальных устройств-носителей 32 расположена седьмая конвейерная лента 46 по фиг. 1 и 2. Седьмая конвейерная лента 46 осуществляет массовое перемещение цыплят 13 в контейнеры для последующей транспортировки в помещение для выращивания, в котором их впоследствии выращивают для последующего потребления.
В ходе использования после вылупления цыпленка 13, его отделяют от скорлупы яйца в сепараторе 12 цыпленка и скорлупы (фиг. 1). Затем цыпленка 13 перемещают на первую конвейерную ленту 14. По мере перемещения цыпленка 13, он переходит на вторую (18), третью (20), четвертую (22), пятую (24) и шестую (28) конвейерные ленты. Каждая из конвейерных лент осуществляет дальнейшее рассредоточение цыплят до образования ими рядов по одному на шестой конвейерной ленте 28.
Цыплят 13 перемещают с шестой конвейерной ленты 28 (фиг. 3) на наклонную конвейерную ленту 30, сбрасывающую их в индивидуальные устройства-носители 32. Камера 36 и система 42 для введения перемещаются ниже индивидуального устройства-носителя 32 на движущейся платформе 45 системы для введения параллельно устройству-носителю 32 и с равной с ним скоростью. Камера 36 (фиг. 4) размещена под устройством-носителем 32. Камера 36 захватывает по меньшей мере одно изображение цыпленка 13 в индивидуальном устройстве-носителе 32. Камера 36 передает захваченное изображение в системный контроллер 38. Системный контроллер 38 обрабатывает изображение и определяет относительное положение цыпленка 13 внутри индивидуального устройства-носителя 32.
После определения относительного положения цыпленка 13 внутри устройства-носителя 32 системный контроллер активизирует систему 42 для введения ниже устройства-носителя в случае, если цыпленок находится в пригодном для вакцинации положении. В случае определения системным контроллером 38 того факта, что цыпленок 13 не находится в требуемом положении (например, цыпленок не находится в вертикальном сидячем положении), системный контроллер 38 не активизирует систему 42 для введения (фиг. 5).
После активизации механизм 50 активизации системы 42 для введения (фиг. 4) обеспечивает перемещение заданного объема вещества из емкости 47 через головку 44 для введения в цыпленка 13 под действием источника 48 газа под давлением. Предпочтительно, в момент доставки головка 44 для введения находится в непосредственной близости или в контакте с цыпленком 13.
После осуществления введения устройство-носитель 32 перемещается до конца конвейерной системы 34 устройств-носителей (фиг. 3). При повороте конвейерной системы связанные с ней посредством шарнирной связи устройства-носители 32 также поворачиваются. В результате цыпленок мягко падает на выдвинутый шарнирный трап 33 и на седьмую конвейерную ленту 46 в случае, если цыпленок 13 вакцинирован. В случае с цыплятами, не получившими инъекцию вследствие их нахождения в неподходящем положении в устройстве-носителе 32, шарнирный трап 33 перемещается обратно в перпендикулярное положение, а цыпленок мягко падает на конвейер 47, после чего его перемещают обратно посредством других средств транспортировки, не показанных на чертеже, и помещают на конвейер 24 для повторного прохождения вышеописанного процесса и получения инъекции.
После осуществления введения камеру 36 и систему 42 для введения (фиг. 4) на движущейся платформе 45 системы для введения отводят обратно в исходное положение и начинают перемещать обратно в положение ниже индивидуальных устройств-носителей 32. Механизмом, управляющим работой движущейся платформы, управляет системный контроллер 38.
Следует понимать, что несмотря на то, что в вышеприведенном описании, относящемся к устройствам для введения, преимущество у безыгольных устройств, также предусмотрена возможность использования игольных устройств для введения. Вакцины, доставляемые путем введения, без ограничения включают векторные вакцины от болезни Марека и вируса герпеса индеек.
Второй вариант 70 реализации показан на фиг. 6. Второй вариант 70 реализации содержит загон 72 и ряд разделителей 74 для обеспечения перемещения по ним сельскохозяйственных животных, таких как молодняк 75 крупного рогатого скота. Разделители 74 расположены параллельно друг другу и содержат передние и задние ворота 77 и 79, соответственно. В закрытом положении передние ворота 77 предотвращают проникновение животного за пределы передних ворот из разделителей 74 и из загона 72. В закрытом положении задние ворота 79 предотвращают обратное перемещение животного из разделителей 74 и обратно в загон 72.
Датчик 76 присутствия, показанный на фиг. 6 и 7, установлен на разделителе 74 или поблизости от него и выполнен с возможностью обнаружения теленка 75, перемещающегося между двумя разделителями. Датчик 73 присутствия, показанный на фиг. 6 и 7, установлен на разделителе 74 или поблизости от него и выполнен с возможностью обнаружения теленка 75, достигающего местоположения поблизости от передних ворот 77 (фиг. 7). Электронный считыватель 93 установлен на разделителе 74 или поблизости от него с целью считывания электронных идентификационных меток 88 сельскохозяйственных животных. Камера 78 установлена выше разделителя 74, в результате чего камера выполнена с возможностью получения полного изображения теленка 75, и исключена вероятность контакта теленка с камерой. Камера 78 захватывает по меньшей мере одно изображение теленка, которое может включать заданный целевой участок на теле теленка 75, такой как верхняя часть правой задней ноги.
Второй вариант 70 реализации также содержит автоматизированную систему 82 для введения (фиг. 8). Система для введения содержит емкость 84, заполненную веществом 86, таким как вакцина, лекарственное средство, биологический препарат или другой медикамент, используемый для лечения указанного животного, в данном случае представляющего собой теленка 75. Система 82 для введения также содержит источник 90 газа под давлением и головку 91 для введения. Газ под давлением может быть доставлен в автоматизированную систему 82 для введения посредством капсул предварительно сжатого газа или, в другом варианте, посредством газопровода, связанного с централизованным компрессором.
Система 82 для введения, показанная на фиг. 8, прикреплена к рамке 92 с возможностью регулировки, причем рамка 92 обеспечивает возможность автоматической регулировки по высоте, глубине и длине системы для введения. Рамка 92 закреплена на закрепленной конструкции, такой как один или более разделителей 74. Возможность автоматической регулировки системы 82 для введения обеспечена посредством механизмов (не показаны), выполненных с возможностью автоматической и удаленной регулировки высоты, ширины и глубины системы 82 для введения относительно положения теленка 75. Подробности указанной возможности регулировки более подробно раскрыты в нижеприведенном описании.
Для доставки вещества 86 внутри емкости 84 в теленка 75 может быть использован источник 90 газа под давлением (фиг. 8). Следует понимать, что управление источником 90 газа под давлением и веществом 86 очевидны специалисту в области безыгольных систем доставки.
Системный контроллер 80 находится в электрической связи с датчиком 76 присутствия, камерой 78 и системой 82 для введения, как схематически показано на фиг. 9. Системный контроллер 80 осуществляет связь с датчиком 76 присутствия, датчиком 73 присутствия, передними воротами 77, задними воротами 79, электронным считывателем 93 (фиг. 7), камерой 78 и системой 82 для введения с целью доставки заданной дозы вещества 86 на заданный целевой участок на теленке 75. Системный контроллер 80 содержит компьютерный процессор и процессор обработки изображений. Системный контроллер 80 выполнен с возможностью удаленного управления работой датчика 73 присутствия, ворот 77, 79, электронного считывателя 93, камеры 78 и системы 82 для введения. Кроме того, системный контроллер 80 обрабатывает изображения, полученные от камеры 78. Подробности указанной методики более подробно раскрыты в нижеприведенном описании.
В ходе использования, как показано на фиг. 6, в загоне 72 находится группа сельскохозяйственных животных, но разделители 74 способствуют перемещению одного теленка 75 вперед между двумя разделителями. По мере перемещения теленка 75 между разделителями 74 активизируют датчик 76 присутствия, связывающийся с системным контроллером с целью закрытия передних ворот 77 для предотвращения дальнейшего перемещения теленка вперед. Затем, при достижении теленком 75 датчика 73 присутствия, системный контроллер 80 также закрывает задние ворота 79 для предотвращения перемещения теленка 75 назад и обратного выхода теленка из разделителей 74. Таким образом, теленок 75 расположен в относительно неподвижном положении между двумя разделителями 74 и передними и задними воротами 77, 79, соответственно.
Кроме того, датчик 73 присутствия (фиг. 6) связывается с камерой 78 с целью запуска процесса получения видеоизображения теленка 75, и в частности, относительного положения заданного участка на теленке. Например, если предпочтительна доставка вещества в верхнюю часть правой задней ноги ("целевой участок"), то камера 78 может быть предварительно запрограммирована на фокусировку на целевом участке. После захвата камерой 78 изображений целевого участка теленка указанные изображения передают в системный контроллер 80.
Системный контроллер 80 (фиг. 9) анализирует изображения и связывается с автоматической системой 82 для введения, установленной на регулируемой рамке 92. Системный контроллер подает автоматической системе 82 для введения сигнал на выполнение любых необходимых корректировок положения по высоте, углу или длине системы и по глубине головки 91 для введения относительно целевого участка. Из емкости 84 выводят заданный объем вещества, и осуществляют введение указанного объема в целевой участок теленка 75 через головку 91 для введения (фиг. 8) посредством сжатого газа из источника 90 газа.
После осуществления введения системный контроллер открывает передние ворота 77 (фиг. 6), обеспечивающие возможность перемещения теленка 75 из разделителей 74 в другую часть помещения. Затем открывают задние ворота 79, что позволяет обеспечить перемещение другого теленка 75 в положение между разделителями 74, и процесс повторяют.
Следует отметить, что электронный считыватель 93 (фиг. 7) размещают с целью цифрового считывания идентификационной метки 88, обычно прикрепляемой к уху теленка. В данном случае электронный считыватель 93 может также сканировать данные, обеспечиваемые на метке 88, с целью индивидуальной идентификации определенного теленка 75. Кроме того, после выполнения вакцинации системный контроллер записывает тип вакцинации и дату доставки в базу данных контроллера, доступную посредством метки 94 теленка. Дополнительно, в случае проникновения теленка 75 обратно в загон 72, системный контроллер 80 после получения личных данных о теленке от электронного считывателя 92 распознает, что теленок 75 уже был вакцинирован, и открывает передние ворота 77, в результате чего теленок 75 может выходить из загона и предотвращена повторная вакцинация теленка 75.
Предусмотрена возможность применения системы для введения по второму варианту 70 реализации и при вакцинации других сельскохозяйственных животных, таких как свиньи, овцы, козы, бизоны и т.п. Следует понимать, что размеры и просветы между разделителями 74, а также степень регулируемости рамки 90, вероятно подлежат изменениям для использования с каждым из вышеуказанных различных видов животных.
Вакцины и вещества, которые могут быть доставлены сельскохозяйственным животным (в основном крупному рогатому скоту), без ограничения включают вакцины против эмфизематозного карбункула, злокачественного отека, энтеротоксемии С и D, инфекционного бычьего ринотрахеита, вируса парагриппа-3 крупного рогатого скота, клостридиальные вакцины, вакцины против вируса респираторно-синцитиальной инфекции крупного рогатого скота, противопастереллезные вакцины, модифицированный живой вирус инфекционного бычьего ринотрахеита или парагриппа-3 крупного рогатого скота, вакцину против вирусной диареи крупного рогатого скота, модифицированный живой вирус респираторно-синцитиальной инфекции крупного рогатого скота, вакцины против бруцеллеза и/или лептоменингита.
Вакцины и вещества, которые могут быть доставлены сельскохозяйственным животным (в основном овцам), без ограничения включают вакцины против кампилобактера, вибрионов, хламидии, Clostridium perfringens С и D, столбняка, интраназальную вакцину против парагриппа, клостридиальные вакцины, вакцины против контагиозного пустулезного дерматита и/или инфекционного пододерматита.
Третий вариант 100 реализации показан на фиг. 10. Третий вариант 100 реализации относится к доставке вещества рыбе 104. Третий вариант 100 реализации содержит первый резервуар 106 и второй резервуар 108. Первый резервуар 106 и второй резервуар 108 связаны друг с другом посредством трубы 110. Размер и длина трубы 110 зависит от вида рыбы 104, размещенной в резервуарах 106, 108.
Передний и задний эластичные баллоны 112, 114 (фиг. 11), соответственно, расположены на концах трубы 110 с целью предотвращения перемещения рыбы 104 по трубе в первый резервуар 106 и второй резервуар 108, как показано на фиг. 11. Каждый эластичный баллон 112, 114 связан с источником 116 текучей среды под давлением (фиг. 10) и выполнена с возможностью удаленной активизации. Кроме того, каждый эластичный баллон 112, 114 (фиг. 11) может быть быстро накачан и спущен.
Правый и левый эластичные баллоны 118, 120, соответственно, расположены на соответствующих (правой и левой) боковых сторонах трубы 110, как показано на фиг. 12.
Сходно с вышеописанными передним и задним эластичными баллонами, правый (118) и левый (120) боковые эластичные баллоны также связаны с источником 116 текучей среды под давлением и выполнены с возможностью удаленной активизации. Правый и левый боковые эластичные баллоны 118, 120 также могут быть быстро накачаны и спущены.
Согласно фиг. 10, эластичный баллон 122 первого резервуара расположен на дне первого резервуара 106. Сходным образом, эластичный баллон 124 второго резервуара расположен на дне второго резервуара 108. Оба эластичных баллонов 122, 124 связаны с системой 116 текучей среды под давлением. Система 116 текучей среды под давлением управляет током текучей среды в каждый эластичный баллон 122, 124 и из него согласно нижеприведенному подробному описанию. Эластичные баллоны 122, 124 резервуаров имеют размеры, позволяющие им достигнуть объема, сходного с объемом первого резервуара 106 и второго резервуара 108.
Датчик 126 присутствия, показанный на фиг. 11, установлен на трубе 110 и расположен поблизости от заднего эластичного баллона 114. Датчик 126 присутствия предназначен для обнаружения присутствия рыбы 104 внутри трубы 110. Камера 128 также установлена на трубе 110 между передним и задним эластичными баллонами 112, 114. Предпочтительно, камера 128 представляет собой видеокамеру, выполненную с возможностью захвата видеоизображения рыбы 104 внутри трубы 110 в реальном времени. В частности, камера 128 предназначена для захвата видеоизображения заданного целевого участка на рыбе 104. Например, в случае с атлантическим лососем предпочтительна доставка инъекций на участок ниже плевральных ребер и кзади от брюшного плавника. Напротив, в случае с тиляпией инъекции зачастую доставляют на участки кзади от любого из боковых плавников. Вследствие того, что целевой участок у различных видов рыб варьируется, необходимо предварительно запрограммировать камеру 128 с целью ее фокусировки на определенном заданном целевом участке подвергаемой лечению рыбы.
На фиг. 13 показана система 130 для введения, содержащая емкость 132 вещества 134 для введения, источник 138 газа под давлением (фиг. 13) и головку 140 для введения (фиг. 14). Система 130 для введения установлена на внутренней стороне трубы 110 между передним и задним эластичными баллонами 112, 114. Система 130 для введения может быть установлена на дне, как показано на фиг. 11, или на боковой стороне, как показано на фиг. 14, трубы 110 в зависимости от вида подвергаемой лечению рыбы.
Головка 140 для введения (фиг. 14) установлена на раме (не показана) внутри системы 130 для введения с возможностью перемещения. Следует понимать, что головка 140 для введения выполнена с возможностью осевого и радиального перемещения вдоль внутренней стенки трубы 110. Системный контроллер 146 (фиг. 15) осуществляет удаленное управление перемещением головки 140 для введения.
Датчик 126 присутствия, камера 128, система 130 для введения и источник 116 текучей среды под давлением связаны с системным контроллером 146 (фиг. 15). Системный контроллер 146 содержит компьютерный процессор и процессор обработки изображений. Системный контроллер выполнен с возможностью удаленного управления датчиком 126 присутствия, камерой 128, системой 130 для введения и источником 116 текучей среды под давлением. Системный контроллер 146 получает информацию о положении, обеспечиваемую камерой 128, и обрабатывает указанную информацию с целью автоматической регулировки положения головки 140 для введения и момента осуществления введения согласно нижеприведенному более подробному описанию. Системный контроллер связывается с источником 116 текучей среды под давлением с целью спуска и накачивания переднего (112), заднего (114), правого (114), и лево (120) эластичных баллонов, а также эластичных баллонов первого (122) и второго (124) резервуаров.
В ходе использования вся рыба 104 находится в первом резервуаре 106. В данном примере допустим, что вся рыба 104 представляет собой лосось. Первый резервуар 106 содержит относительно большой объем воды и большое количество рыбы 104, как показано на фиг. 10. Первый резервуар 106 связан со вторым резервуаром 108 посредством трубы 110. Второй резервуар 108 содержит небольшой объем воды и предпочтительно не содержит рыбы. Передний и задний эластичные баллоны 112, 114 находятся в накачанном положении, в результате чего исключено прохождение рыбы 104 в трубу 110.
Для обеспечения доставки вещества рыбе 104 спускают задний эластичный баллон 114. Следовательно, обеспечена возможность прохождения рыбы 104 внутрь трубы 110 по направлению ко второму резервуару 108. Однако датчик 126 присутствия обнаруживает присутствие рыбы 104 в трубе и подает соответствующий сигнал системному контроллеру 146. Системный контроллер обеспечивает накачивание переднего эластичного баллона 112 с целью блокировки дальнейшего перемещения рыбы 104 вперед по направлению ко второму резервуару 108. Кроме того, при прохождении рыбы 104 за пределы датчика 126 присутствия системному контроллеру 146 подают сигнал о накачивании заднего эластичного баллона 114, в результате чего другая рыба 104 не может проникнуть в трубу 110.
Датчик 126 присутствия также подает камере 128 сигнал об ее активизации (фиг. 11). Камера 128 захватывает видеоизображения заданного целевого участка рыбы 104. Указанный целевой участок может варьироваться в зависимости от вида рыбы. В случае с лососем предпочтительный участок доставки представляет собой нижнюю сторону рыбы между плевральными ребрами и кзади от брюшного плавника.
После захвата камерой 128 изображения заданного участка рыбы 104 изображение отправляют в системный контроллер 146 для обработки (фиг. 15). На основании положения рыбы, определенного камерой 128, системный контроллер 146 при необходимости удаленно регулирует положение головки 140 для введения относительно рыбы 104 с целью ее на целевом участке. В частности, системный контроллер 146 управляет высотой, шириной и глубиной головки 140 для введения относительно положения рыбы 104, определенного камерой 128, а также активизацией процесса введения. Соответственно, после перемещения рыбы 104 в заданное положение внутри трубки 110 положение головки для введения соответствующим образом регулируют под управлением системного контроллера 146.
Также предусмотрен вариант, в котором вместо управления положением головки 140 для введения системный контроллер может управлять положением рыбы 104 (фиг. 12). Путем управления давлением переднего (112), заднего (114), правого (118) и левого (120) эластичных баллонов системный контроллер может быть выполнен с возможностью изменения положения рыбы 104, в результате чего целевой участок может быть расположен в непосредственной близости от головки 140 для введения.
После доставки инъекции рыбе 104 системный контроллер 146 связывается с передним эластичным баллоном 112 и боковыми эластичными баллонами 118, 120 для их быстрого спуска (фиг. 12 и 15). Спуск боковых эластичных баллонов 118, 120 приводит к снятию двигательных ограничений для рыбы 104. Спуск переднего эластичного баллона 112 обеспечивает возможность перемещения рыбы 104 вперед и во второй резервуар 108. Затем спускают задний эластичный баллон 114, что позволяет обеспечить перемещение другой рыбы 104 в трубу 110, и процесс повторяют.
Следует отметить, что по мере перемещения каждой из рыб 104 во второй резервуар 108 соответствующим образом изменяют объем воды в эластичном баллоне 122 первого резервуара и эластичном баллоне 124 второго резервуара (фиг. 10). Например, по мере выведения популяции рыбы 104 из первого резервуара 106 во второй резервуар 108 начинают медленно накачивать эластичный баллон 122 первого резервуара. По мере указанного наполнения объем воды в первом резервуаре 106 уменьшается. В свою очередь, по мере наполнения второго резервуара 108 рыбой 104 из первого резервуара 106 объем воды во втором резервуаре должен быть увеличен. Эластичный баллон 124 второго резервуара медленно спускают, что позволяет увеличить объем воды во втором резервуаре с целью обеспечения надлежащих условий для большей популяции рыбы 104. Системный контроллер 146 управляет скоростью накачивания и спуска эластичных баллонов 122, 124 первого и второго резервуаров, соответственно. Следует понимать, что системный контроллер 146 находится в связи с источником 116 текучей среды под давлением для удаленного открытия и закрытия соответствующих клапанов на пути к каждому из указанных в настоящем описании компонентов с целью осуществления указанной задачи.
Также следует понимать, что поверх каждого из эластичных баллонов резервуаров может быть размещено ложное дно для обеспечения более равномерной поверхности для резервуара. Указанный фактор может быть важным при обеспечении полного вывода всей рыбы из первого резервуара перед повторным заполнением новым резервуаром.
Вакцины или другие вещества, которые могут быть доставлены рыбам без ограничения включают вакцину от фурункулеза лосося и вакцину от герпеса карпа кои; вакцины или лекарственные средства могут быть доставлены с целью лечения вирусной геморрагической септицемии, ихтиофтириоза и миксозомоза некоторых видов промысловой рыбы.
Четвертый вариант 150 реализации показан на фиг. 16. Четвертый вариант 150 реализации относится к интраназальной доставке определенных вакцин и других лекарственных средств поросятам 152.
Четвертый вариант 150 реализации содержит профилированный элемент 154, подробно показанный на фиг. 16 и также подробно показанный на фиг. 17. Каждый из профилированных элементов 154 содержит отходящий от него патрубок 156. Профилированный элемент 154 имеет форму, позволяющую размещать в нем лицевую часть головы поросенка 152 и содержит профилированное пространство для размещения в нем рыла поросенка. Кроме того, профилированный элемент 154 содержит пластину 158 для размещения рыла, предназначенную для размещения на ней конца рыла поросенка 152. Пластина 158 для размещения рыла содержит пару полых пальцев 160, выступающих кнаружи от профилированного элемента 154. Пара пальцев 160 имеет размеры и форму, позволяющие размещать указанные пальцы в ноздрях поросенка 152 при взятии поросенком в рот патрубка 156 согласно нижеприведенному подробному описанию.
Множество профилированных элементов 154 закреплены на поверхности, такой как вертикальная стенка (фиг. 16). Каждый из патрубков 156 снабжен датчиком 159 давления, связанным с системным контроллером 180 согласно фиг. 18. Каждый из патрубков 156 также связан с емкостью 162, содержащей жидкую композицию. Клапан 166, управляемый системным контроллером 180, открывает и закрывает путь тока композиции из емкости 162 к патрубку 156.
Пара полых пальцев 160 снабжена датчиком 181, активизируемым при размещении обоих пальцев 160 в ноздрях поросенка (фиг. 17). Датчик 181 связан с системным контроллером 180 и системой 168 доставки вещества под давлением, подробно показанной на фиг. 17. Система 168 доставки вещества под давлением содержит контейнер 170, содержащий запас вещества 172, такого как вакцина. Система 168 доставки вещества под давлением также содержит источник 174 газа под давлением, связанный с контейнером 170 вещества 172, а также механизм 176 управления, активизирующий и прекращающий доставку вещества под давлением, а также управляемый системным контроллером 180.
Соответственно, система 168 доставки вещества под давлением и клапан 166, управляющий током композиции 164 через патрубок 156, находятся в электронной связи друг с другом посредством системного контроллера 180. Преимущества и технология работы указанной связи более подробно раскрыты в нижеприведенном описании работы четвертого варианта 150 реализации.
Пол, на котором поросенок стоит при кормлении, представляет собой платформу 190, содержащую шарнир 192 и защелку 194. Системный контроллер 180 удаленно управляет защелкой 194. Платформа 190, шарнир 192 и защелка 194 выполняют функцию люка-провала с целью предотвращения кормления поросенка, ранее уже получившего вещество. Работа платформы 190 более подробно раскрыта в нижеприведенном описании.
В ходе использования поросят 152 загоняют в зону удерживания, в которой закреплено множество профилированных элементов 154. Указанный процесс может быть осуществлен посредством ряда конвейерных лент и разделителей или может быть осуществлен вручную. Для достижения наиболее эффективного результата предпочтительно, если поросята 152 испытывают голод и/или жажду. Поросенку 152 предоставлен патрубок 156, поросенок инстинктивно ухватывает его и начинает сосать. При захвате поросенком 152 патрубка и последующем сосании активизируют датчик 159 давления, сообщающий системному контроллеру 180 о присутствии поросенка 152. Одновременно, рыло поросенка упирается в пластину 158 для размещения рыла профилированного элемента 154. Кроме того, пара пальцев 160 проходит в ноздри поросенка, а датчик 181 обнаруживает факт указанного прохождения. Датчик 181 сообщает о факте контакта с ноздрями поросенка системному контроллеру 180.
В ходе сосания поросенком 152 патрубка 156 системный контроллер 180 (фиг. 18) активизирует клапан 166, регулирующий ток композиции 164 (фиг. 16), с целью его открытия, и доза композиции протекает из емкости 162 через патрубок 156 в рот поросенка. Одновременно также активизируют систему 168 доставки вещества под давлением. Вещество 172, такое как вакцину, доставляют под действием текучей среды под давлением через носовой канал поросенка 152. Давление доставки предназначено для доставки дозы через носовой канал или через хрящ без нанесения повреждений.
После доставки дозы системой 168 доставки вещества под давлением (фиг. 18) от системы 168 доставки вещества под давлением в системный контроллер 180 подают сигнал. Системный контроллер 180 активизирует закрытие клапана 166. Закрытие клапана 166 приводит к прекращению тока композиции 164 к патрубку 156, и поросенка побуждают к перемещению от патрубка 156. Указанный процесс может быть выполнен путем отведения патрубка 156 за профилированный элемент 154. Указанный процесс также может быть выполнен путем образования препятствия между поросенком 152 и патрубком 156, такого как автоматизированное опущение пола под поросенком 152. После лишения поросенка 152 возможности сосать патрубок 156 его переводят на дальнейшую обработку.
Следует отметить, что электронный считыватель 157 (фиг. 16) размещают с целью цифрового считывания идентификационной метки 182, обычно прикрепляемой к уху поросенка. В данном случае электронный считыватель 157 может также сканировать данные, обеспечиваемые на метке 182, с целью индивидуальной идентификации конкретного поросенка 152. Кроме того, после выполнения вакцинации системный контроллер записывает тип вакцинации и дату доставки в базу данных контроллера, доступную посредством метки 182 поросенка.
В случае проникновения поросенка 152 обратно в устройство по четвертому варианту 150 реализации системный контроллер 180 после получения личных данных о поросенке от электронного считывателя 157 распознает, что он уже был вакцинирован, и предотвращает его повторную вакцинацию (фиг. 16, 17, 18). Системный контроллер 180 не активизирует поток композиции от патрубка 156 или систему 168 доставки вещества. Кроме того, системный контроллер 180 связывается с защелкой 194 с целью ее открытия. В результате платформа 190 поворачивается вокруг шарнира 192 и обеспечивает падение поросенка на нижний уровень для дальнейшей обработки. Предусмотрена возможность использования любого числа различных устройств для предотвращения многократного лечения поросенка. Вышеописанная система приведена в качестве примера и не призвана ограничивать изобретение.
Следует понимать, что некоторые вакцины и/или медикаменты предпочтительно доставляют через носовую полость или мягкий хрящ поросенка 152. Указанные вещества без ограничения включают вещества для лечения или предотвращения микоплазмоза, гемофилезного полисерозита, плевропневмоний, актинобациллы, репродуктивно-респираторного синдрома свиней, свиного гриппа и вируса эпидемической диареи свиней.
Следует понимать, что несмотря на то, что в вышеприведенном описании упор сделан на вакцины и медикаменты, специалисту будет очевидно, что доставляемое вещество может представлять собой любое из множества веществ, используемых для вакцинации, медикаментозного или какого-либо другого лечения сельскохозяйственных животных, млекопитающих (включая человека) или любых других животных.
Специалисту в области техники, к которой относится настоящее изобретение, после рассмотрения принципов, раскрытых в настоящем описании и на сопутствующих чертежах, будет очевидно множество модификаций и других аспектов настоящего изобретения, раскрытого в настоящем описании. Соответственно, следует понимать, что настоящее изобретение не призвано быть ограниченным конкретными раскрытыми аспектами, а модификации и другие аспекты входят в рамки объема сопутствующей формулы изобретения. Несмотря на то, что в настоящем описании использованы конкретные термины, указанные термины приведены исключительно в общем описательном смысле и не призваны ограничивать изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДОСТАВКИ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2736858C2 |
| СИСТЕМА И СПОСОБ РЕЦИРКУЛЯЦИИ | 2019 |
|
RU2795588C2 |
| СПОСОБ ПОЛУЧЕНИЯ И ДОСТАВКИ РАСТВОРОВ ООЦИСТ | 2019 |
|
RU2792197C2 |
| Композиция для пероральной доставки биоактивных агентов | 2014 |
|
RU2688136C1 |
| УСИЛЕННЫЙ ИММУННЫЙ ОТВЕТ У ВИДОВ ПТИЦ | 2010 |
|
RU2570732C9 |
| СПОСОБ ОБРАБОТКИ ЯИЦ (ВАРИАНТЫ) | 2002 |
|
RU2264708C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РАБОЧЕЙ ПЛИТЫ С ОДНИМ СЕНСОРОМ | 2018 |
|
RU2762344C2 |
| ПОВЫШЕНИЕ ИММУННОГО ОТКЛИКА У ВИДОВ КРУПНОГО РОГАТОГО СКОТА | 2011 |
|
RU2606855C2 |
| Система обработки живой рыбы и связанные с ней способы | 2018 |
|
RU2745559C1 |
| Система и способ обследования живой рыбы | 2018 |
|
RU2821412C1 |












Изобретения относятся к сельскому хозяйству. Система для автоматической доставки вещества на заданный участок животного содержит: устройство позиционирования, выполненное с возможностью позиционирования по отдельности животного, имеющего заданный участок доставки; устройство захвата изображения для захвата по меньшей мере одного полного изображения относительного положения животного в устройстве позиционирования; систему доставки; и системный контроллер, связанный с устройством позиционирования, устройством захвата изображения и системой доставки. Система для автоматической доставки вещества на заданный участок рыбы содержит: первый резервуар; второй резервуар; резервуар удерживания, в который обеспечена возможность перемещения рыбы на пути из первого резервуара во второй резервуар; удерживающее устройство, выполненное с возможностью удержания рыбы по отдельности; устройство захвата изображения для захвата по меньшей мере одного изображения относительного положения заданного участка доставки на рыбе; выполненную с возможностью позиционной регулировки систему доставки и системный контроллер, связанный с удерживающим устройством, устройством захвата изображения и системой доставки. Изобретения позволяют обеспечить получение эффективной дозы каждым животным. 2 н. и 18 з.п. ф-лы, 18 ил.
1. Система для автоматической доставки вещества на заданный участок животного, содержащая:
устройство позиционирования, выполненное с возможностью позиционирования по отдельности животного, имеющего заданный участок доставки;
устройство захвата изображения для захвата по меньшей мере одного полного изображения относительного положения животного в устройстве позиционирования;
систему доставки для доставки заданной дозы вещества на заданный участок доставки животного; и
системный контроллер, связанный с устройством позиционирования, устройством захвата изображения и системой доставки.
2. Система по п. 1, также содержащая сенсорное устройство для определения присутствия животного.
3. Система по п. 1, в которой животное представляет собой одно из следующих категорий животных: птицу, рыбу, беспозвоночное или млекопитающее.
4. Система для автоматической доставки вещества на заданный участок рыбы, содержащая:
первый резервуар для содержания по меньшей мере одной рыбы, имеющей заданный участок доставки;
второй резервуар для размещения по меньшей мере одной рыбы;
резервуар удерживания, в котором обеспечена возможность перемещения рыбы на пути из первого резервуара во второй резервуар;
удерживающее устройство, выполненное с возможностью удержания рыбы по отдельности;
устройство захвата изображения для захвата по меньшей мере одного изображения относительного положения заданного участка доставки на рыбе;
выполненную с возможностью позиционной регулировки систему доставки для доставки заданной дозы вещества на заданный участок доставки на рыбе и
системный контроллер, связанный с удерживающим устройством, устройством захвата изображения и системой доставки.
5. Система по п. 4, также содержащая датчик присутствия для обнаружения присутствия рыбы в резервуаре удерживания.
6. Система по п. 4, в которой система доставки представляет собой впрыскиватель.
7. Система по п. 6, в которой впрыскиватель является безыгольным.
8. Система по п. 1, в которой вещество представляет собой вакцину, лекарственное средство или биологический препарат.
9. Система по п. 4, в которой вещество может быть использовано для лечения одного или более из следующего: фурункулез, вирус герпеса карпа кои, вирусная геморрагическая септицемия, ихтиофтириоз и миксозомоз.
10. Система по п. 1, в которой вещество предназначено для лечения одного или более из следующего: болезни Ньюкасла, инфекционного бронхита, кокцидиоза, болезни Марека или колибактериоза.
11. Система по п. 1, в которой система доставки представляет собой систему для введения.
12. Система по п. 4, в которой система для введения выполнена безыгольной.
13. Система по п. 1, в которой вещество может быть использовано для лечения одного или более из следующего: фурункулез, вирус герпеса карпа кои, вирусная геморрагическая септицемия, ихтиофтириоз и миксозомоз.
14. Система по п. 4, в которой удерживающее устройство расположено в резервуаре удерживания.
15. Система по п. 4, в которой устройство захвата изображения представляет собой камеру.
16. Система по п. 1, в которой устройство захвата изображения представляет собой камеру.
17. Система по п. 1, в которой системный контроллер содержит компьютерный процессор.
18. Система по п. 4, также содержащая источник текучей среды под давлением, связанный с первым и вторым резервуарами и системным контроллером.
19. Система по п. 18, в которой системный контроллер выполнен с возможностью управления объемом воды в первом и втором резервуарах путем управления источником текучей среды под давлением.
20. Система по п. 1, в которой животное позиционируют по отдельности.
| WO 2012008843 A1, 19.01.2012 | |||
| WO 2012017359 A1, 09.02.2012 | |||
| US 5780448 A1, 14.07.1998 | |||
| US 9050281 B2, 09.06.2015 | |||
| АППЛИКАТОР И СИСТЕМА МИКРОВОЛНОВОЙ КОАГУЛЯЦИИ | 2010 |
|
RU2562287C2 |
| US 20150118203 A1, 30.04.2015. | |||

