ПРИОРИТЕТ
Настоящая заявка испрашивает приоритет по предварительной патентной заявке США №62/254737, поданной 13 ноября 2015 г., и предварительной патентной заявке США №62/349,981, поданной 14 июня 2016 г. Содержание каждой из указанных заявок включено во всей полноте в настоящую заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Предотвращение или лечение бактериальных, вирусных и грибковых инфекций и других заболеваний, как правило, осуществляют путем вакцинации или доставки лекарственного средства субъекту. Для всех животных, в частности позвоночных или рыб, а также для беспозвоночных, таких как ракообразные, доставку вакцин, биологических препаратов и других лекарственных средств, как правило, осуществляют с целью предотвращения заболевания, гибели или с целью поддержания общего удовлетворительного состояния здоровья. Во многих животноводческих и рыбных хозяйствах обеспечение эффективного лечения всех животных является трудной задачей. Количество и вариабельность размеров субъектов приводят к затруднениям при вакцинации и доставке других лекарственных средств каждому из субъектов.
В частности, в контексте промышленного птицеводства, известен ряд современных способов, посредством которых осуществляют лечение оплодотворенных яиц или куриц лекарственными средствами. Указанные способы включают:
1) автоматизированную вакцинацию в инкубатории, выполняемую "in ovo" ("в яйцо") на 18 или 19 сутки;
2) автоматизированную вакцинацию в инкубатории, выполняемую после вылупления;
3) ручную вакцинацию в инкубатории, выполняемую после вылупления;
4) добавление вакцины или лекарственного средства в корм или питьевую воду в помещении для выращивания и
5) доставку вакцины или лекарственного средства путем опрыскивания цыплят вручную или посредством массовых распылителей.
Несмотря на то что в промышленном птицеводстве на вакцины и другие фармацевтические средства ежегодно уходит свыше 3 млн. долларов, окупаемость подобных затрат не гарантирована вследствие проблем, связанных со способами доставки вакцин или других веществ. Каждый из вышеуказанных способов обладает заметными и значительными недостатками. Широкой популярностью пользуется автоматизированная вакцинация "в яйцо", осуществляемая в инкубатории на 18 или 19 сутки. Однако указанный способ обладает недостатками. В частности, многие из значимых вакцин недоступны для ввода "в яйцо" или не могут быть доступны для ввода "в яйцо" вследствие природы заболевания и/или конъюгатов, необходимых для переноса активных молекул/частиц. Кроме того, существующая практика вакцинации "в яйцо" требует пробития или прокалывания отверстия в яйце на 18 или 19 сутки. Указанный способ доставки требует удержания яйца на месте посредством каких-либо механических средств с одновременным вводом иглы в яйцо и осуществлением ввода вакцины или лекарственного средства. Указанная практика может способствовать проникновению в яйцо патогенов и бактерий, способных оказывать отрицательное воздействие на эмбрион. В ходе вакцинации "в яйцо" нежелательные яйца (протухшие яйца или яйца, содержащие мертвые эмбрионы) также находятся в контакте с механическими средствами удержания яиц в неподвижном состоянии перед пробитием или прокалыванием отверстия и вводом иглы. Таким образом, существует высокая вероятность распространения нежелательного загрязнения в другие яйца и в систему вакцинации. Соответственно, существует вероятность переноса загрязнения в последующие живые яйца в ходе дальнейшей обработки.
В целях снижения воздействия от указанного переноса загрязнения, в промышленности стали прибегать к внедрению и вводу антибиотиков в яйца в ходе вакцинации "в яйцо". Однако потребители в настоящее время стремятся не приобретать птицу, обработанную антибиотиками. Соответственно, в промышленности существует необходимость в поиске альтернативных способов лечения известных заболеваний другим образом, позволяющим сохранять удовлетворительное состояние здоровья поголовья без использования антибиотиков.
Автоматизированную вакцинацию в инкубатории после вылупления осуществляют после вылупления цыплят и перед их подсчетом и транспортировкой в помещение для выращивания. В существующем способе вакцинации после вылупления используют широкий ряд систем массовых распылителей, посредством которых выполняют одновременное распыление вакцин и других лекарственных средств по большой группе суточных цыплят. Доказана неэффективность указанных систем для доставки вакцин и лекарственных средств всем цыплятам. Распылительные сопла доставляют аспирированную дозу группе цыплят путем распыления над их головами, причем большинство капель падают на поверхность голов и тел цыплят, в результате чего некоторые цыплята не получают эффективную дозу. Кроме того, некоторые цыплята прячутся под телами других цыплят. Соответственно, указанные цыплята могут вовсе не быть подвергнуты воздействию распыленного вещества, и следовательно, эффективной вакцинации. Цыплята, вакцинация которых проведена неэффективно, представляют риск не только для себя, так как они могут заразиться соответствующим заболеванием, но также и для всех окружающих цыплят. Один невакцинированный цыпленок может распространить заболевание по всей ферме и заразить любого другого невакцинированного или неэффективно вакцинированного цыпленка в поголовье.
Несмотря на то, что ручную вакцинацию в инкубатории после вылупления можно считать более надежной по сравнению с другими способами, исследования показали, что указанная практика также недостаточно надежна и приводит к травмам и смертности среди цыплят. Производства сталкиваются с проблемами поиска надежных вакцинаторов и затрат на оплату труда при росте суточной выработки. В свою очередь, указанный рост приводит к обострению проблемы обеспечения эффективной вакцинации всех цыплят, дополнительно повышающей общие затраты. Кроме того, вследствие необходимости ручного обращения с цыплятами в ходе вакцинации существует риск нанесения повреждений или смерти цыпленка в случае нанесения ему повреждений в ходе ручного обращения. Далее, вследствие необходимости вакцинации множества цыплят работники подвержены риску травм, связанных с повторяющейся нагрузкой. Это приводит к экономическим потерям и потерям производительности птицеводческих предприятий.
Известен альтернативный подход, заключающийся в добавлении вакцины или лекарственного средства в корм или питьевую воду в помещении для выращивания. Указанная методика обладает лишь частичной эффективностью вследствие того, что бактерии, патогены и паразиты в пищеварительной системе цыпленка по большей части приобрели резистентность к лекарственным средствам. Другие факторы, обуславливающие частичную эффективность указанного способа включают отсутствие единообразия питьевых линий, доставку неравномерных доз вследствие неравномерного объема поглощенного корма или воды, и тот факт, что некоторый вакцины крайне быстро теряют эффективность в воде или корме.
Недостатки существующих методик вакцинации вкупе с последними тенденциями рынка в сторону отказа от использования антибиотиков в птицеводстве, включая корм с добавлением медицинских препаратов, являются основными предпосылками к созданию раскрытых в настоящем описании вариантов реализации изобретения. Доставка веществ через слизистую оболочку является эффективной и производительной при использовании надлежащего способа доставки. Задача при массовой доставке заключается в обеспечении получения эффективной дозы каждым животным.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Раскрытые в настоящем описании варианты реализации изобретения относятся к системе и способу автоматической доставки вещества на заданный участок тела животного. Система содержит устройство позиционирования, позиционирующее отдельное животное, и устройство захвата изображения, захватывающее по меньшей мере одно изображение животного. Система также содержит компьютерный процессор, принимающий и передающий данные, и устройство доставки для доставки вещества на заданный участок. Устройство захвата изображения передает изображение в компьютерный процессор, который активизирует устройство доставки с целью доставки вещества на целевой участок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вслед за вышеприведенным общим описанием различных вариантов реализации настоящего изобретения, нижеприведенное подробное описание выполнено со ссылкой на сопутствующие чертежи, выполненные без соблюдения масштаба и не содержащие всех компонентов системы, на которых:
На фиг. 1 показан упрощенный схематичный вид сверху первого варианта реализации;
На фиг. 2 показан упрощенный схематичный вид сбоку варианта реализации по фиг. 1;
На фиг. 3 показан увеличенный вид сверху части варианта реализации по фиг. 1 в ходе использования;
На фиг. 4 показан вид сбоку в перспективе варианта реализации по фиг. 3;
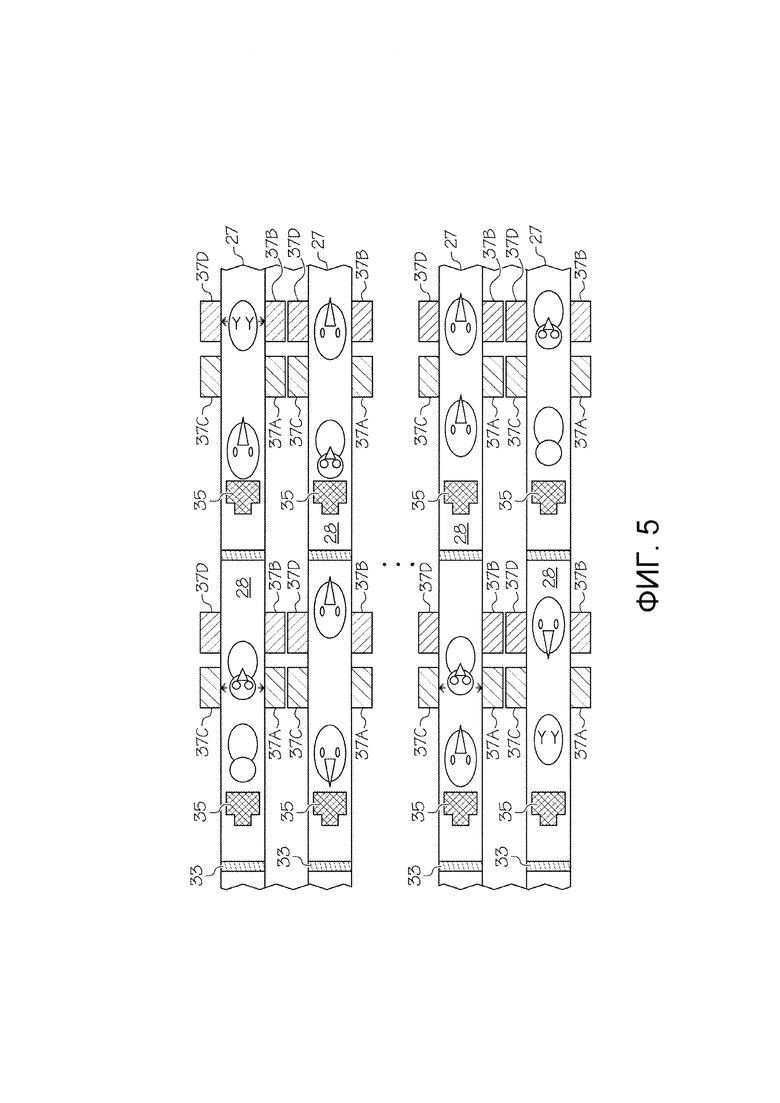
На фиг. 5 показан увеличенный вид сверху части варианта реализации по фиг. 1 в ходе использования;
На фиг. 6 приведено схематичное отображение взаимодействия некоторых компонентов первого варианта реализации;
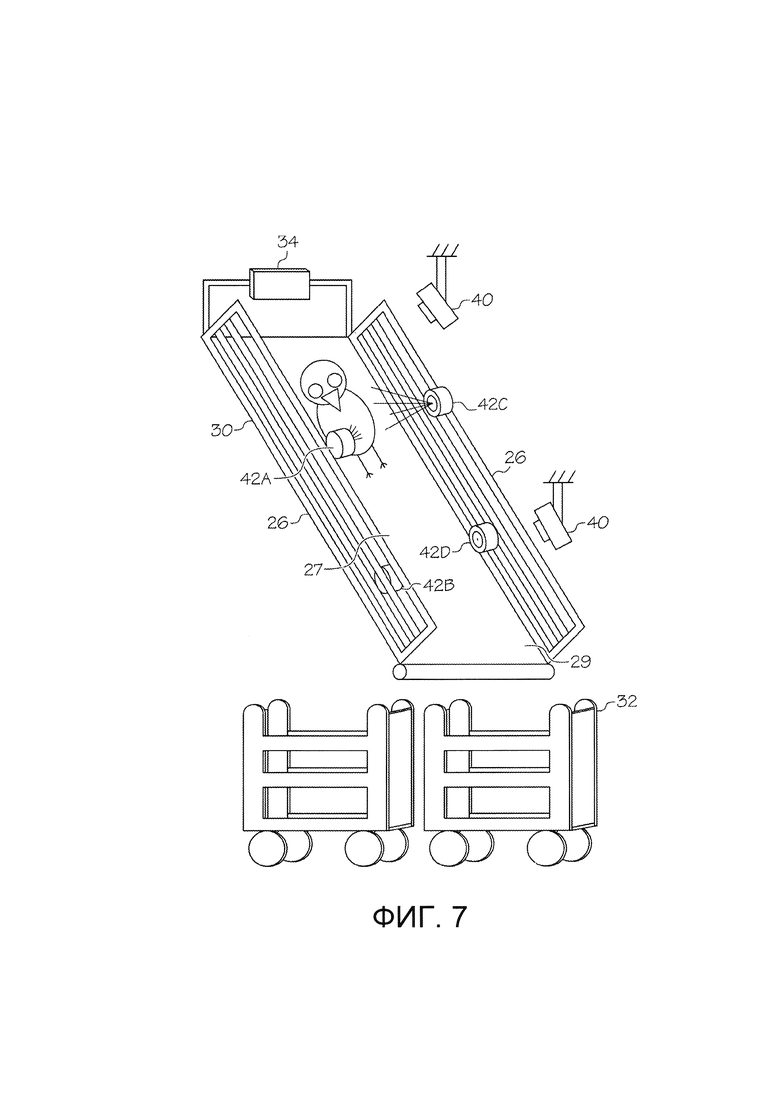
На фиг. 7 показан частичный увеличенный вид в перспективе части варианта реализации по фиг. 1 в ходе использования;
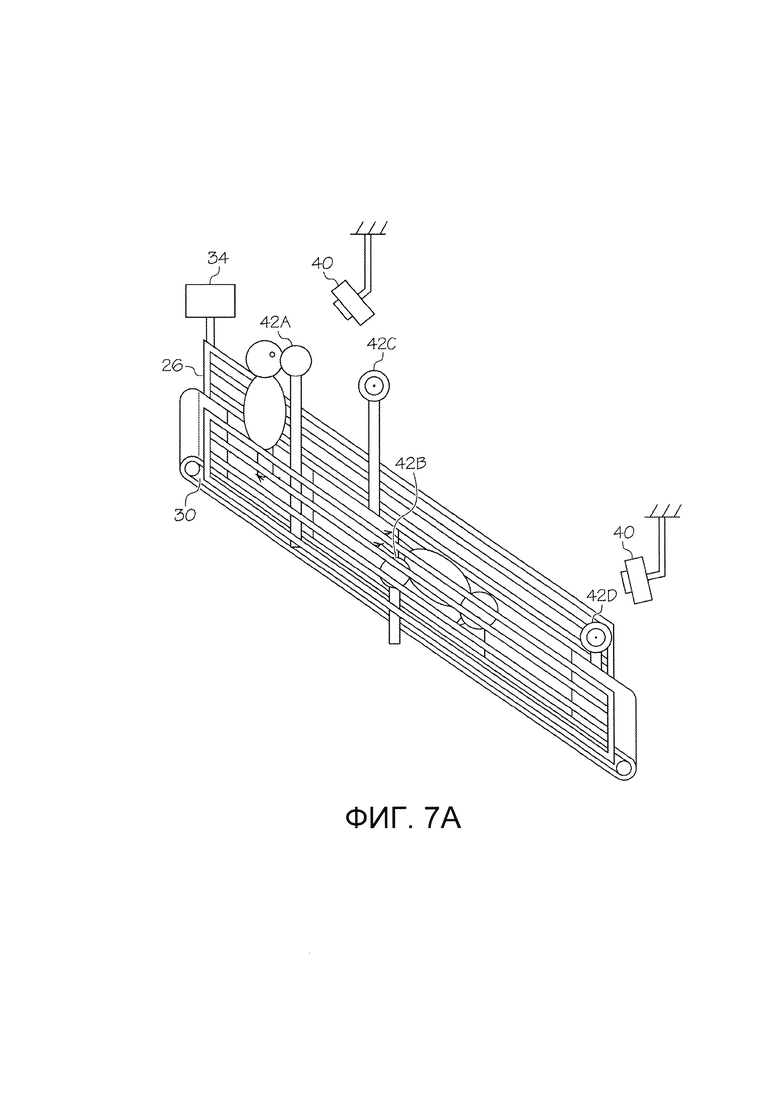
На фиг. 7А показан вид сбоку варианта реализации по фиг. 7;
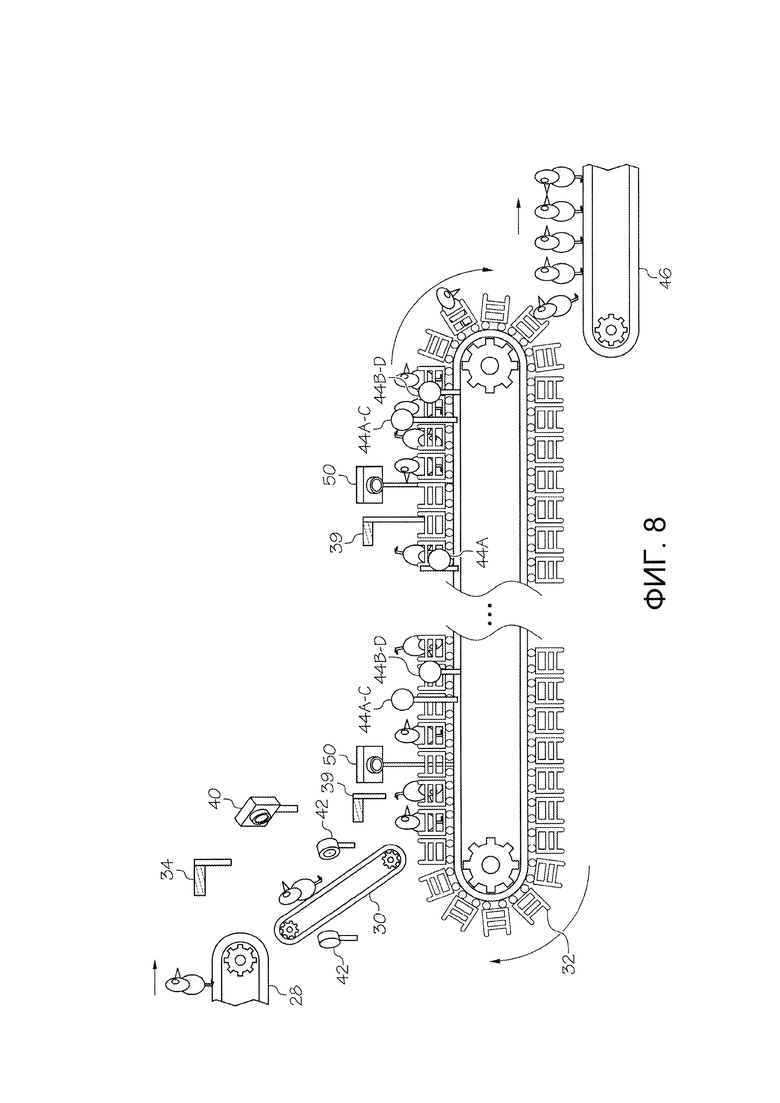
На фиг. 8 показан увеличенный вид сбоку части варианта реализации по фиг. 1 в ходе использования;
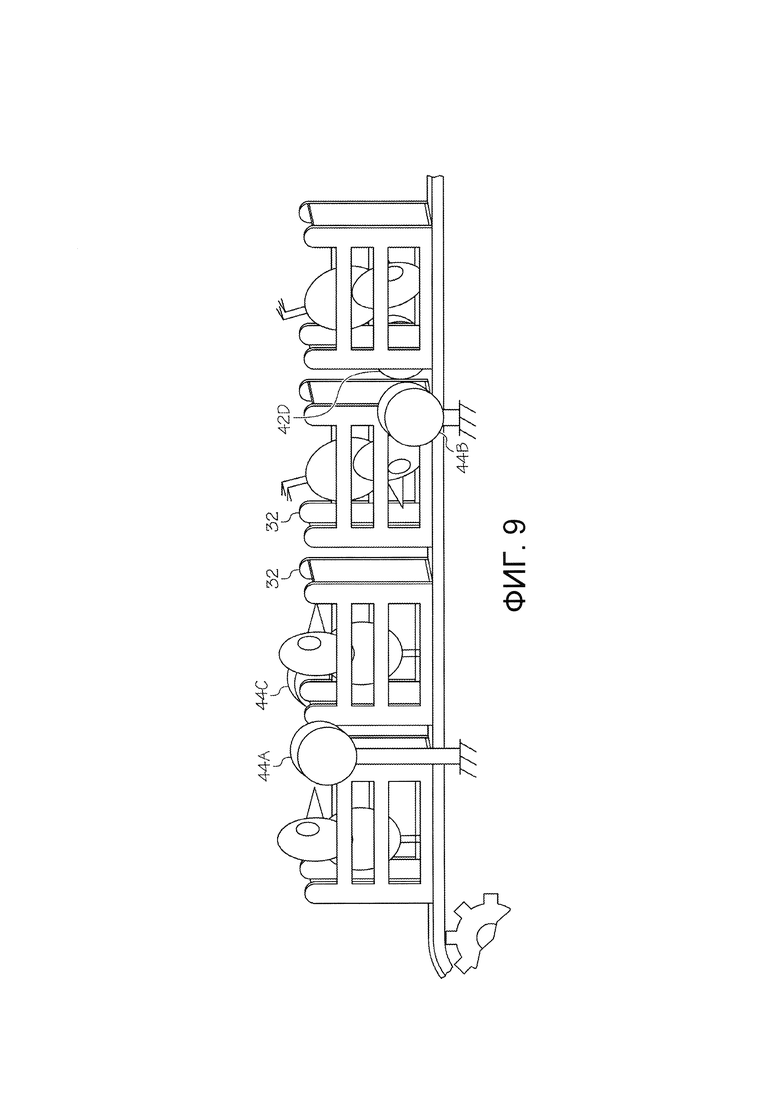
На фиг. 9 показан частичный увеличенный вид в перспективе части варианта реализации по фиг. 8; и
На фиг. 10 показан частичный увеличенный вид сверху варианта реализации по фиг. 1 в ходе использования.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к автоматизированным системам и способам эффективной доставки вещества животному. Различные аспекты настоящего изобретения более подробно описаны в нижеприведенном описании со ссылкой на сопутствующие чертежи, на которых показаны некоторые, но не все, аспекты настоящего изобретения. Настоящее изобретение может быть реализовано в виде широкого ряда различных форм и не призвано быть ограниченным аспектами, раскрытыми в настоящем описании.
Один из вариантов реализации относится к доставке вещества новорожденным цыплятам после их отделения от скорлупы и до выведения из инкубатория. Кроме того, способы и системы согласно аспектам настоящего изобретения, относящиеся к цыплятам, могут быть использованы с птицей любого вида, без ограничения включая кур, индеек, уток, гусей, перепелов, фазанов, страусов, экзотических птиц и т.д.
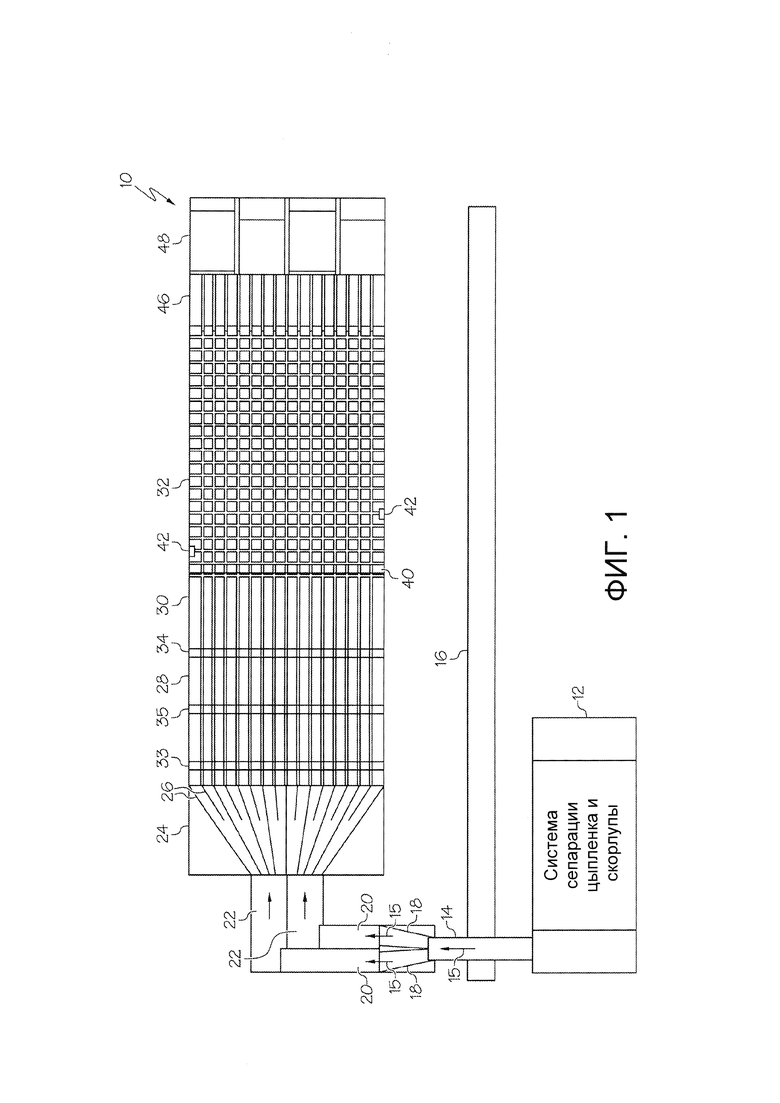
На фиг. 1 показан упрощенный схематичный вид сверху всей системы по первому варианту 10 реализации. Упрощенный вид не содержит части оборудования, реализованного на различных участках первого варианта 10 реализации, которое более подробно раскрыто в нижеприведенном описании и показано на других более подробных видах. Сходным образом, на фиг. 2 показан упрощенный схематичный вид сбоку всей системы по первому варианту 10 реализации.
Первый вариант 10 реализации наиболее вероятно расположен в суточном помещении куриного инкубатория. Первый вариант 10 реализации содержит сепаратор 12 цыпленка и скорлупы. Сепаратор 12 цыпленка и скорлупы обеспечивает средства отделения новорожденного цыпленка от скорлупы его яйца. Первый конвейер 14 перемещает цыпленка от сепаратора 12 цыпленка и скорлупы сквозь отверстие в разделительной стенке 16 на второй, более широкий, конвейер 18 в направлении, указанной стрелкой 15. Разделительная стенка 16 отделяет процесс отделения скорлупы от процесса доставки вещества.
На втором более широком конвейере 18 начинают рассредоточение цыплят, облегчающее обработку каждого отдельного цыпленка. Со второго конвейера 18 цыплят переносят в направлении, указанном стрелкой 15, на третий и четвертый конвейеры 20, 22, соответственно, причем оба указанных конвейера шире конвейера 18. Пятый конвейер 24 содержит разделители 26, которые могут быть подвешены на верхней части узла транспортировки. Разделители 26 образуют дорожки 27 (показаны на фиг. 3, 4 и 5), содействующие перемещению цыплят в узкие ряды, которые постепенно преобразуются в ряды "по одному" (фиг. 1).
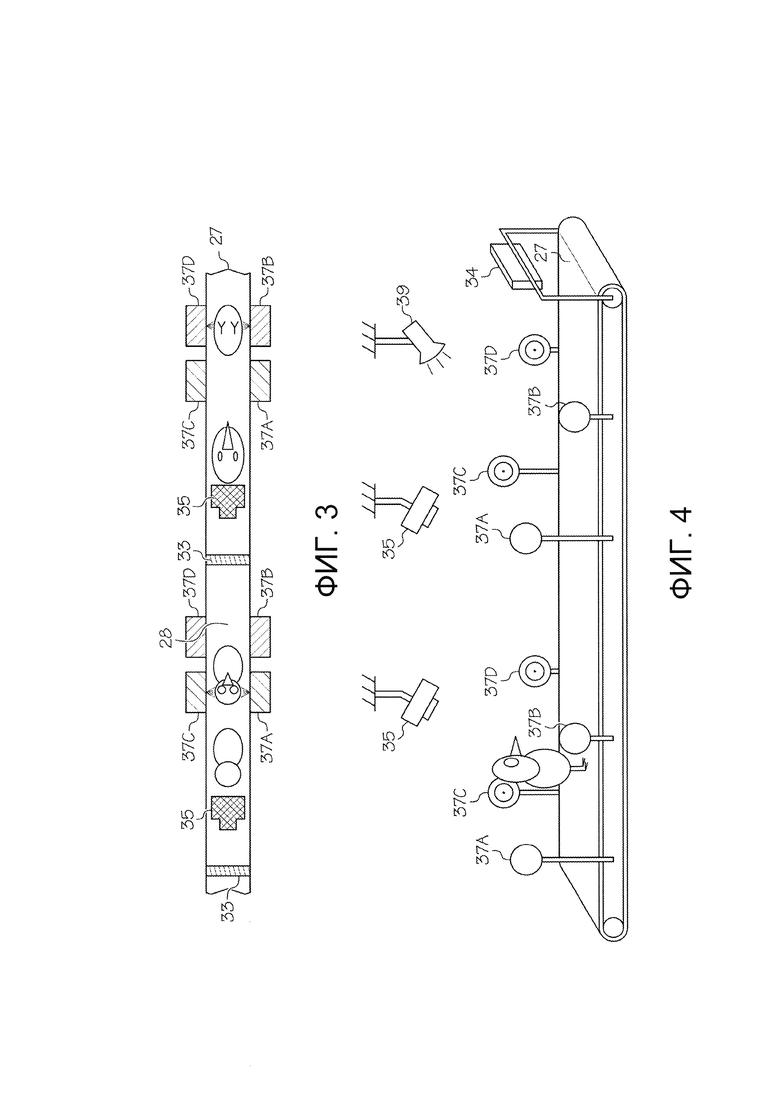
Как показано на фиг. 3, вдоль каждой дорожки 27 на шестой конвейерной ленте 28 расположено множество первых датчиков 33 присутствия. Также вдоль каждой дорожки 27 на шестой конвейерной ленте 28 расположены первые камеры 35, размещенные ниже по потоку перемещения от первых датчиков 33 присутствия и первых камер 35. Кроме того, на каждой дорожке 27 на пути шестой конвейерной ленты 28 расположены первые распылительные головки 37A-D. Высота размещения и местоположение первых распылительных головок 37A-D варьируются. В частности, согласно подробной иллюстрации на фиг. 4, распылительная головка 37А установлена в более высоком положении на правой стороне дорожки 27. Распылительная головка 37В установлена в более низком положении на правой стороне дорожки 27. Напротив, распылительная головка 37С установлена в более высоком положении на левой стороне дорожки 27, а распылительная головка 37D установлена в более низком положении на левой стороне. Подобное расположение позволяет первым распылительным головкам 37A-D попадать в заданную цель на теле цыпленка вне зависимости от положения цыпленка на дорожке 27.
Следует отметить, что распылительные головки 37A-D по фиг. 4 выполнены с возможностью выпуска струи брызг конической формы. Таким образом, при перемещении цыпленка мимо распылительных головок 37A-D установленные верхние головки 37А и С или нижние головки 37В и D в совокупности обеспечивают обрызгиваемый участок, обеспечивающий эффективную доставку вещества. На фиг. 3 и 5 показана область распространения струи брызг.
Поблизости от шестой конвейерной ленты 28 также расположен первый источник 39 стробирующего света. Первый источник 39 стробирующего света приводит к чириканию цыпленка, и соответственно, к открытию цыпленком клюва. В случае доставки вакцины или другого лекарственного средства через слизистую оболочку первый источник 39 стробирующего света может быть активизирован с целью осуществления оральной доставки.
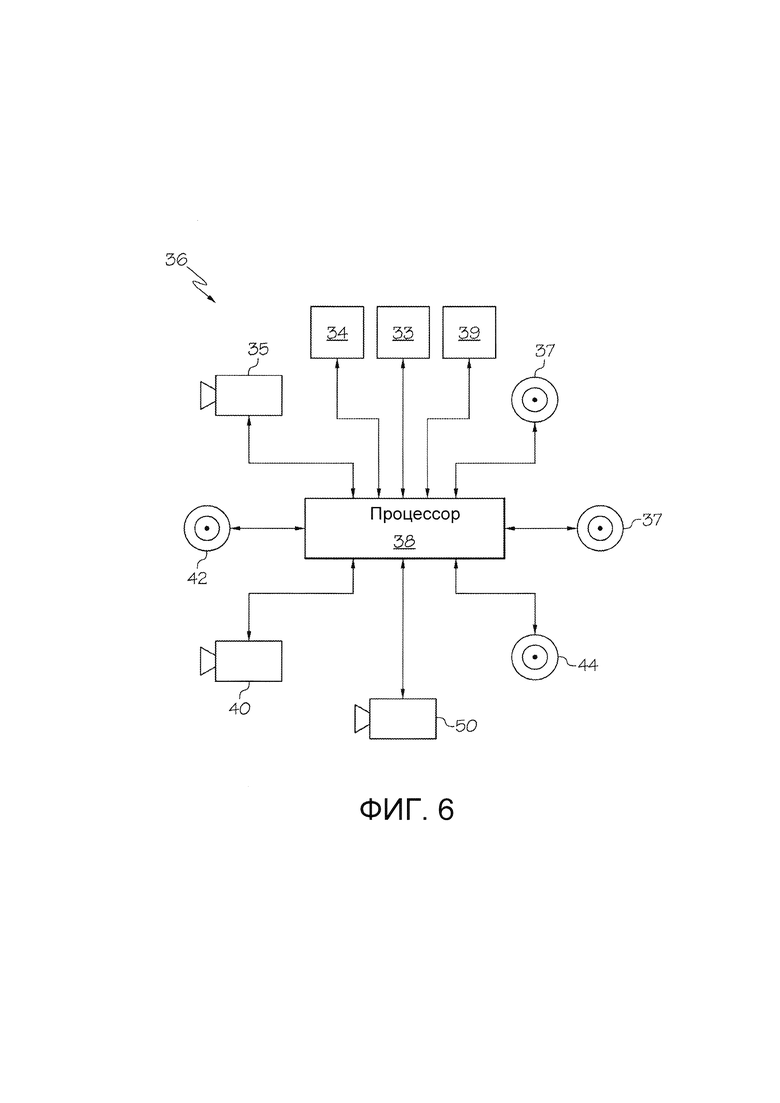
Первые датчики 33 присутствия, первые камеры 35, первые распылительные головки 37A-D и первый источник 39 стробирующего света связаны с автоматизированной сетью 36 доставки вещества, схематично показанной на фиг. 6. Сеть 36 содержит компьютерный процессор 38, обеспечивающий взаимную связь компонентов сети, таких как первый датчик 33 присутствия, первая камера 35 и первые распылительные головки 37A-D. Работа сети 36 более подробно раскрыта в нижеприведенном описании.
На конце шестой конвейерной ленты 26 и вдоль наклонной конвейерной ленты 30 расположено множество вторых датчиков 34 присутствия. Каждый из вторых датчиков 34 присутствия расположен с возможностью обнаружения присутствия цыпленка, перемещаемого по дорожке 27, образованной разделителями 26, на любой из боковых сторон наклонной конвейерной ленты 30. Также вдоль пути 29 наклонной конвейерной ленты 30 расположены вторые камеры 40 и вторые распылительные головки 42A-D. Вторые датчики 34 присутствия, вторые камеры, 40 и вторые распылительные головки 42A-D связаны с автоматизированной сетью 36 доставки вещества.
Сходно с вышеприведенным описанием в отношении первых распылительных головок 37 (фиг. 5), каждая из вторых распылительных головок 42 (фиг. 7) имеет дальность распыления, в пределах которой доставляют струю брызг. При попадании цыпленка в струю брызг по мере его перемещения по наклонной конвейерной ленте обеспечена доставка эффективной дозы распыляемого раствора. Каждая из вторых распылительных головок 42 расположена с возможностью фокусировки струи брызг на цыпленке, перемещаемом по пути наклонной конвейерной ленты 30. Вдоль пути наклонной конвейерной ленты 30 может быть расположено несколько вторых распылительных головок 42A-D с целью обеспечения возможности доставки струи брызг каждому из цыплят посредством по меньшей мере одной второй распылительной головки 42 вне зависимости от положения указанного цыпленка. Например, вдоль пути наклонной конвейерной ленты 30 расположены четыре вторые распылительные головки 42: 42А, 42В, 42С и 42D, как показано на фиг. 7. Две вторые распылительные головки 42А, 42В установлены на правой стороне пути, а остальные две головки 42С, 42D расположены на левой стороне. Одна из вторых распылительных головок 42А на правой стороне направлена на правую сторону верхней половины тела цыпленка при перемещении цыпленка по пути в прямом вертикальном положении. Другая вторая распылительная головка 42В на правой стороне направлена на правую сторону нижней половины тела цыпленка при перемещении цыпленка по пути в прямом вертикальном положении. Сходным образом, вторая распылительная головка 42С, установленная на левой стороне, направлена на левую сторону верхней половины тела цыпленка при перемещении цыпленка по пути в прямом вертикальном положении, а другая установленная на левой стороне вторая распылительная головка 42D направлена на левую сторону нижней половины тела цыпленка при перемещении цыпленка по пути в прямом вертикальном положении. Указанная конфигурация расположения головок позволяет обеспечить доставку распыляемого раствора по меньшей мере в один глаз, носовую полость, и/или рот цыпленка, перемещаемого по наклонной конвейерной ленте, вне зависимости от положения тела цыпленка.
Ниже наклонной конвейерной ленты расположены индивидуальные устройства-носители 32. Каждое из индивидуальных устройств-носителей 32 выполнено сходным с чашей, клеткой или корзиной и имеет размеры, позволяющие разместить в нем одного цыпленка, как показано на фиг. 7 и 8. Индивидуальные устройства-носители 32 связаны друг с другом и перемещаются по пути индивидуальных носителей посредством конвейерной системы. Каждое устройство-носитель 32 шарнирно установлено относительно конвейерной системы, в результате чего каждое устройство может быть повернуто или может вращаться вокруг своего шарнирного соединения, как показано на фиг. 8.
Вдоль пути индивидуальных устройств-носителей 32 на фиг. 8 расположен третий набор камер 50. Вдоль пути индивидуальных устройств-носителей 32 также установлен третий набор распылительных головок 44. Сходно с вышеописанными первыми распылительными головками 37 и вторыми распылительными головками 42, каждая из третьих распылительных головок 44 имеет дальность распыления, в пределах которой доставляют струю брызг. Каждая из третьих распылительных головок 44 обращена к пути индивидуальных носителей и устройству-носителю 32, в результате чего в ходе работы струя брызг контактирует с цыпленком на заданном участке.
Следует понимать, что при входе каждого из цыплят в индивидуальное устройство-носитель 32 и перемещении по пути по фиг. 8 и 9 индивидуальных устройств-носителей цыплята могут принимать одно из ряда положений. Соответственно, третьи распылительные головки 44 должны быть расположены таким образом, что общая дальность доставки распылительных головок 44 достигает заданного целевого участка тела каждого из цыплят вне зависимости от положения тела указанного цыпленка внутри индивидуального устройства-носителя 32.
С целью обеспечения получения всеми цыплятами эффективной дозы от третьих распылительных головок 44A-D, головки третьего набора распылительных головок закреплены на различной высоте и/или под различными углами вдоль пути индивидуальных носителей. В первом варианте 10 реализации третьи распылительные головки 44 закреплены в более высоких 44А, 44С и более низких 44В, 44D положениях относительно индивидуальных устройств-носителей 32, как подробно показан на фиг. 9. Цель использования указанной конфигурации очевидна из нижеприведенного подробного описания работы системы.
Ниже индивидуальных устройств-носителей 32 расположена седьмая конвейерная лента 46, как показано на фиг. 1, 2 и 8. Седьмая конвейерная лента 46 перемещает цыплят по мере их переноса из индивидуальных устройств-носителей 32 в контейнеры 48 (фиг. 2) с целью последующего перемещения в помещение для выращивания, в котором их впоследствии выращивают для последующего потребления.
В ходе работы первого варианта 10 реализации, раскрытого в вышеприведенном описании, цыплят перемещают из сепаратора 12 цыпленка и скорлупы на первый конвейер 14 (фиг. 1). По мере перемещения цыплят по первому конвейеру 14 цыплята проходят сквозь разделительную стенку 16, отделяющую процесс вылупления от процесса доставки вещества.
С первого конвейера 14 цыплят перемещают в направлении, указанном стрелками 15, на второй, третий и четвертый конвейеры 18, 20, 22, соответственно. Указанные конвейеры 18, 20, 22 предназначены для перемещения цыплят по пути обработки и рассредоточения цыплят с целью подготовки к образованию ими одиночных рядов, как будет подробно объяснено далее. Цыплят перемещают с четвертого конвейера 22 на пятый конвейер 24, который постепенно расширяется и содержит разделители 26. Постепенно увеличивающаяся ширина и разделители 26 способствуют дальнейшему рассредоточению цыплят и формированию одиночных рядов. Цыплят в одиночных рядах перемещают с пятого конвейера 24 на шестой конвейер 28. Разделители 26 на шестом конвейере 28 формируют одиночные ряды, в которых по ширине может одновременно проходить лишь один цыпленок. Указанная конфигурация показана на фиг. 10.
После перемещения цыпленка на шестой конвейер 28, как показано на фиг. 3, 4 и 5, первый датчик 33 присутствия обнаруживает присутствие цыпленка на данной дорожке 27. Первый датчик 33 присутствия подает сигнал автоматической системе 36 доставки вещества, которая подает сигнал первой камере 35 (фиг. 4). Первая камера 35 формирует по меньшей мере одно изображение цыпленка по мере его перемещения по дорожке 27 на шестом конвейере 28. Изображение передают обратно в компьютерный процессор 38 в автоматизированной системе 36 доставки вещества, который обрабатывает изображение с целью определения относительного положения целевого участка на теле цыпленка. На основании определенного процессором положения целевого участка система 36 доставки подает сигнал активизации на одну из первых распылительных головок 37. Например, в случае, если изображение, отправленное с первой камеры 35 в компьютерный процессор 38, указывает на тот факт, что цыпленок лежит на спине, а предварительно заданным целевым участком является лицевая слизистая оболочка, то компьютерный процессор подает сигнал активизации на наиболее короткую первую распылительную головку 37С.Наиболее короткая первая распылительная головка 37С доставляет струю брызг на лицевой участок цыпленка, соответственно обеспечивая доставку эффективной дозы вещества в глаз, рот или носовую полость цыпленка.
Кроме того, компьютерный процессор 38 может активизировать первый источник 39 стробирующего света. В результате указанной активизации цыпленок чирикает под воздействием интенсивных импульсов света. Открытый клюв цыпленка может получать дозу вещества непосредственно или опосредованно от одной или нескольких распылительных головок 37.
По завершении перемещения цыпленка по шестой конвейерной ленте 28 цыпленок падает на наклонную конвейерную ленту 30 по фиг. 7. Второй датчик 34 присутствия подает в компьютерный процессор 38 сигнал о наличии цыпленка на одиночном пути наклонной конвейерной ленты 30, образованном разделителями 26. Сигнал от второго датчика 34 присутствия активизирует вторую камеру 40. Камера 40 получает по меньшей мере одно изображение цыпленка по мере его перемещения по пути наклонной конвейерной ленты 30. Изображение передают в компьютерный процессор 38 и обрабатывают с целью определения положения цыпленка.
После определения положения цыпленка компьютерным процессором 38 на одну из вторых распылительных головок 42, находящуюся в заданном местоположении, отправляют сигнал активизации в заданный момент времени. Активизация рассчитана по времени с целью обеспечения доставки второй распылительной головкой 42 струи вещества, такого как вакцина или другое лекарственное средство, на лицевую слизистую оболочку цыпленка в ходе его перемещения по пути наклонного конвейера, как показано на фиг. 7А. Например, в случае, если цыпленок перемещается по наклонной конвейерной ленте 30 в вертикальном положении на спине, то компьютерный процессор 38, определивший положение цыпленка и скорость его движения, может активизировать правую верхнюю вторую распылительную головку 42А в конкретный момент времени. Указанное действие приводит к доставке струи брызг в правый глаз цыпленка по мере его перемещения.
Своевременная активизация второй распылительной головки 42 по фиг. 7А обеспечивает возможность распределения вещества по всем лицевым слизистым оболочкам, включая глаза, носовую полость и рот, без значительных потерь и с обеспечением эффективной дозы. Кроме того, своевременная активизация второй распылительной головки 42 обеспечивает получение эффективной дозы вещества каждым из цыплят, проходящих по наклонной конвейерной ленте 30.
Предусмотрена возможность обеспечения дополнительных вторых распылительных головок 42 с целью доставки более, чем одного вещества цыплятам, перемещаемым по наклонной конвейерной ленте 30, при необходимости. Например, в случае, если распылительные головки 42А, 42В, 42С и 42D согласно вышеприведенному описанию доставляют цыпленку первую вакцину, то дополнительные распылительные головки 42Е, 42F, 42G и 42Н могут быть размещены сходным образом (согласно вышеприведенному описанию) с целью доставки второй вакцины или другого лекарственного средства цыпленку по мере его перемещения по пути наклонной конвейерной ленты 30, как показано на фиг. 6.
По завершении перемещения цыпленка по наклонной конвейерной ленте 30 цыпленок попадает в одно из индивидуальных устройств-носителей 32, как показано на фиг. 8. Поблизости от точки, в которой цыпленок входит в устройство-носитель 32, установлена третья камера 50. Камера 50 получает изображение цыпленка в индивидуальном устройстве-носителе 32. Изображение передают в компьютерный процессор 38 и обрабатывают с целью определения относительного положения цыпленка. После определения компьютерным процессором относительного местоположения лицевых слизистых оболочек цыпленка, расположенного внутри индивидуального носителя, компьютерный процессор 38 активизирует третью распылительную головку 44, расположенную наиболее оптимально для обеспечения эффективной доставки. Например, в случае, если цыпленок расположен в индивидуальном устройстве-носителе 32 кверху лапами, компьютерный процессор может активизировать вторую распылительную головку 44А в конкретный момент времени. Таким образом, при прохождении устройства-носителя 32 мимо распылительной головки 44А цыпленок получает струю брызг в один глаз (фиг. 8).
Сходно с предыдущей доставкой, третья распылительная головка 44 выполнена с возможностью доставки эффективной дозы на лицевую слизистую оболочку каждого из цыплят, обрабатываемых в системе. Таким образом, каждый из цыплят получает надлежащую дозу, а состояние и крепость здоровья всего поголовья улучшается. Сходно с вышеприведенным описанием, предусмотрена возможность использования дополнительных третьих распылительных головок 32 с целью доставки дополнительных веществ цыплятам, расположенным внутри устройств-носителей 32. Например, посредством третьих распылительных головок 44А и 44В цыплятам может быть доставлено лекарственное вещество, а посредством дополнительных третьих распылительных головок 44С и 44D, расположенных на низкой и высокой высоте относительно устройства-носителя 32, соответственно, цыплятам может быть доставлена вакцина или другое вещество.
Следует понимать, что несмотря на то, что первый вариант 10 реализации обеспечивает доставку вещества вдоль шестой конвейерной ленты 28 вдоль наклонной конвейерной ленты 30 и внутрь индивидуального устройства-носителя 32, все указанные компоненты не являются обязательными. Например, в одном случае подходящей может быть доставка вещества цыплятам вдоль наклонной конвейерной ленты 30, а в другом случае может быть более подходящей доставка вещества цыплятам, расположенным в устройстве-носителе 32. Напротив, доставка различных веществ на различных этапах обработки также может быть предпочтительной. Например, может быть предпочтительной доставка первого вещества или вакцины цыплятам в ходе их перемещения по шестой конвейерной ленте 28, доставка второго вещества или вакцины в ходе перемещения цыплят по наклонной конвейерной ленте 30 и доставка третьего вещества или вакцины в ходе перемещения цыплят в индивидуальных устройствах-носителях 32.
По завершении перемещения устройства-носителя 32 устройство осуществляет поворот вокруг шарнирного соединения, и цыпленок выпадает из устройства и падает на седьмую конвейерную ленту 46. Указанная седьмая конвейерная лента 46 сбрасывает цыплят в контейнеры 48. Контейнеры 48 могут перемещаться по восьмой конвейерной ленте 49 до последующего сбора с целью транспортировки в другое местоположение для дальнейшей обработки.
Также следует отметить, что вышеописанный вариант пример реализации относится к автоматизированной доставке вещества на слизистую оболочку птицы. Раскрытые в настоящем описании варианты реализации также справедливы для автоматизированной доставки вещества на слизистую оболочку любого другого животного, такого как человек, а также другие сельскохозяйственные животные. Предусмотрена возможность автоматизированной доставки некоторых лекарственных средств крупному рогатому скоту или овцам на лицевую слизистую оболочку (или вагинальной или анальной доставки) согласно требованиям конкретной области применения.
Предусмотрено, что виды вакцин и других веществ, вводимых цыплятам путем распыления на слизистые оболочки, могут без ограничения включать следующие вещества: вакцины против болезни Ньюкасла, вирусного бронхита, Е. coli, сальмонеллы, кокцидий и кампилобактер.
Также предусмотрена возможность использования настоящих примеров реализации для автоматизированной доставки вещества на слизистую оболочку других животных и млекопитающих, включая человека. В частности, возможны некоторые области применения, подходящие для автоматизированной доставки вещества на лицевую слизистую оболочку младенца, ребенка или человека с ограниченными возможностями. Кроме того, система автоматизированной доставки, раскрытая в настоящем описании, может найти применение при лечении других животных, таких как сельскохозяйственные животные, грызуны и другие животные, выращиваемые в коммерческих целях.
Специалисту в области техники, к которой относится настоящее изобретение, после рассмотрения принципов, раскрытых в настоящем описании и на сопутствующих чертежах, будет очевидно множество модификаций и других аспектов настоящего изобретения, раскрытого в настоящем описании. Соответственно, следует понимать, что настоящее изобретение не призвано быть ограниченным конкретными раскрытыми аспектами, а модификации и другие аспекты входят в рамки объема сопутствующей формулы изобретения. Несмотря на то, что в настоящем описании использованы конкретные термины, указанные термины приведены исключительно в общем описательном смысле и не призваны ограничивать изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ВВЕДЕНИЯ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2735245C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЗДОРОВЬЯ И ПОЛА ЦЫПЛЕНКА | 2016 |
|
RU2744172C2 |
| СИСТЕМА РАСПЫЛЕНИЯ ВАКЦИНЫ | 2003 |
|
RU2333803C2 |
| УЗЕЛ ДЛЯ ПЕРЕМЕЩЕНИЯ И РАЗДЕЛЕНИЯ ЖИВЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПТИЦ | 2020 |
|
RU2830215C1 |
| СИСТЕМА И СПОСОБ РЕЦИРКУЛЯЦИИ | 2019 |
|
RU2795588C2 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА ПТИЦЫ | 2016 |
|
RU2639544C1 |
| ВАКЦИНА ДЛЯ ЗАЩИТЫ ПТИЦЫ ОТ QХ-ПОДОБНОГО ВИРУСА ИНФЕКЦИОННОГО БРОНХИТА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2009 |
|
RU2568053C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ КАПЕЛЬ ЖИДКОСТИ НА ОТКРЫТЫЙ И НЕПОДВИЖНЫЙ ЛОТОК | 2021 |
|
RU2838945C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ УПАКОВКИ ПИЩЕВЫХ ПРОДУКТОВ | 2013 |
|
RU2586922C1 |
| СИСТЕМА И СПОСОБ ВАКЦИНАЦИИ ПТИЦ | 2015 |
|
RU2712278C2 |


Изобретение относится к промышленному птицеводству, в частности к системе для автоматической доставки вещества в глаз домашней птице. Система содержит устройство позиционирования, выполненное с возможностью позиционирования домашней птицы в вертикальном положении вдоль движущейся платформы, устройство захвата изображения, систему доставки вещества, содержащую множество выходов доставки вдоль пути движущейся платформы, и компьютерный процессор, связанный с устройством захвата изображения и системой доставки. Причем устройство захвата изображения выполнено с возможностью захвата по меньшей мере одного изображения домашней птицы и передачи его в компьютерный процессор, который выполнен с возможностью обработки изображения, определения относительного положения домашней птицы и активизации по меньшей мере одного из указанного множества выходов доставки системы доставки для доставки эффективной дозы вещества в глаз домашней птице. Использование изобретения позволит быстро и эффективно вакцинировать птиц. 14 з.п. ф-лы, 10 ил.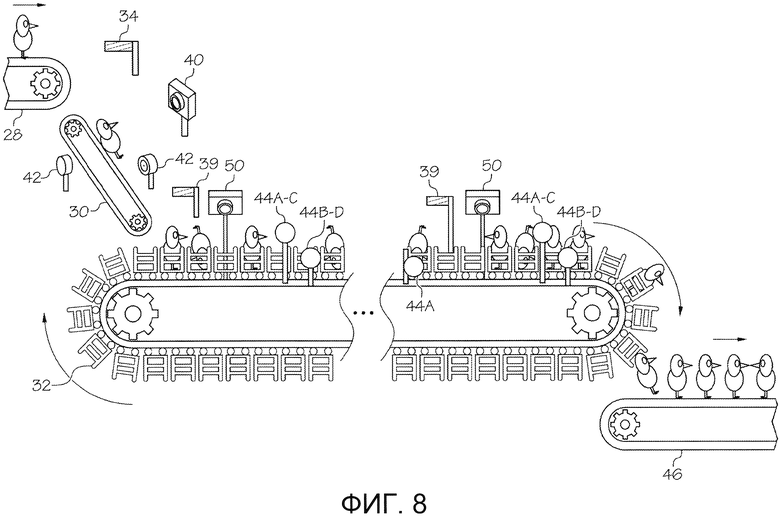
1. Система для автоматической доставки вещества в глаз домашней птице, содержащая:
устройство позиционирования, выполненное с возможностью позиционирования домашней птицы в вертикальном положении вдоль движущейся платформы;
устройство захвата изображения;
систему доставки вещества, содержащую множество выходов доставки вдоль пути движущейся платформы; и
компьютерный процессор, связанный с устройством захвата изображения и системой доставки, причем устройство захвата изображения выполнено с возможностью захвата по меньшей мере одного изображения домашней птицы и передачи его в компьютерный процессор, который выполнен с возможностью обработки изображения, определения относительного положения домашней птицы и активизации по меньшей мере одного из указанного множества выходов доставки системы доставки для доставки эффективной дозы вещества в глаз домашней птице.
2. Система по п. 1, в которой система позиционирования представляет собой по меньшей мере одно из следующего: разделитель и по меньшей мере одну движущуюся платформу.
3. Система по п. 1, в которой система позиционирования содержит контейнер для удержания в нем отдельной домашней птицы.
4. Система по п. 1, в которой домашняя птица представляет собой курицу.
5. Система по п. 1, в которой система доставки вещества представляет собой распылитель.
6. Система по п. 1, в которой вещество представляет собой вакцину, лекарственное средство или биологический препарат.
7. Система по п. 1, в которой вещество предназначено для лечения одного или более из следующего: болезни Ньюкасла, инфекционного бронхита, кокцидиоза, E. coli, сальмонеллы, кампилобактера или колибактериоза.
8. Система по п. 1, в которой устройство захвата изображения содержит камеру.
9. Система по п. 1, также содержащая по меньшей мере один стимул.
10. Система по п. 9, в которой стимул содержит свет.
11. Система по п. 10, в которой свет представляет собой стробирующий свет.
12. Система по п. 1, в которой выходы доставки расположены в различных местах вдоль движущейся платформы.
13. Система по п. 12, в которой выходы доставки расположены на различной высоте вдоль движущейся платформы.
14. Система по п. 4, в которой курица представляет собой новорожденного цыпленка.
15. Система по п. 5, в которой струя распылителя не шире размера глаза цыплёнка.
| US 20100310589 A1, 09.12.2010 | |||
| WO 2012008843 A1, 19.01.2012 | |||
| US 20150320010 A1, 12.11.2015 | |||
| US 4850997 A1, 25.07.1989 | |||
| US 4449968 A1, 22.05.1984. |

