Изобретение относится к исследовательским малоразмерным бинарным космическим аппаратам (БКА), весом менее 1000 грамм, предназначенным для поиска и сбора в космическом пространстве наноразмерных объектов внеземного происхождения, скопления которых расположены в окрестностях точек либрации (точек Лагранжа) в виде пылевых облакоподобных структур (например, пылевые облака Кордылевского в системе Луна-Земля). Цель исследований - на основании изучения собранных БКА материалов внеземного происхождения, их физико-химического анализа и классификации, осуществление последующего синтеза подобных наночастиц с известными или новыми свойствами, не встречающимися на Земле.
Используемое в описании изобретения словосочетание «бинарный космический аппарат» (БКА) понимается как космический аппарат, состоящий из двух корпусов и одной общей армированной гибкой ленточной солнечной батареи, расположенной между ними, разворачиваемый за счет разматывания солнечной батареи, смотанной в рулон, при реверсивном перемещении одного корпуса относительно другого в противоположные стороны и обратно, осуществляемом с помощью мультивекторных матричных ракетных двигателей (ММРД). Гибкая ленточная солнечная батарея (СБ) - это гибкая диэлектрическая ленточная подложка, на которую нанесен массив соединенных между собой тонкопленочных солнечных фотоэлементов в сочетании с микроконтейнерами для сбора нанообъектов. Точки либрации - это точки, где гравитационное и центробежное ускорения, воздействующие на помещенное в окрестностях точки тело, уравновешиваются, в связи с чем так называемые «малые тела» могут там накапливаться [1].
Нанообъекты - отдельные наночастицы размером в интервале 2-100 нанометров и системы наночастиц, образующие однородные или неоднородные многозвенные конструкции, размеры которых меньше 2000 нанометров.
Нанообъекты с магнитными свойствами - могут состоять из одного ядра ферромагнитной наночастицы, из структуры ядро-оболочка или ядро и несколько оболочек [2], из замершей жидкости с вкраплением магнитных наночастиц, из магнитных наночастиц с порами, заполненными замороженными коллоидными растворами и магнитных наночастицы со свойствами, не обнаруженными или не синтезированными на Земле.
Известен микро-спутник с солнечной батареей, выполненной в виде гибкой подложки с нанесенными тонкопленочными солнечными фотоэлементами, намотанной при выведении вокруг корпуса микро-спутника и развертываемой с помощью пружин после выхода на заданную орбиту. Микро-спутник содержит: корпус спутника, механизм развертывания на базе торсионных пружин, солнечные батареи, выполненные из гибкой подложки с нанесенными тонкопленочными фотоэлементами, двигатели, антенны, солнечный датчик, конусный узел стыковки с другим спутником [3].
Недостатком устройства является отсутствие возможности активного сбора нанообъектов с магнитными свойствами с помощью магнитного поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Известен бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации, содержащий два панелеобразные корпуса, соединенных с контейнерами, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрих-кодовой лентой, микроконтейнерами, в каждом из которых размещены пленочные электроды и жесткие диэлектрические микроподложки, также содержит два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, три реверсивных шаговых двигателя, три катушки для размещения гибкой диэлектрической ленточной подложки и герметизирующей самоклеющейся пленки, прижимной электромагнит, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, датчик штрих-кода, два дисковых токосъемника, два контроллера, два стабилизатора напряжения, приемопередатчик [4].
Недостатком устройства является отсутствие возможности активного сбора нанообъектов с магнитными свойствами с помощью магнитного поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Наиболее близким по технической сущности является бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации, содержащий два панелеобразные корпуса, соединенных с контейнерами, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрих-кодовой лентой, микроконтейнерами, в каждом из которых размещены пленочные электроды и жесткие диэлектрические микроподложки, также содержит два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, три реверсивных шаговых двигателя, три катушки для размещения гибкой диэлектрической ленточной подложки и герметизирующей пленки, термоэлемент, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, датчик штрих-кода, два дисковых токосъемника, два контроллера, два стабилизатора напряжения, приемопередатчик [5].
Недостатком устройства является отсутствие возможности активного сбора нанообъектов с магнитными свойствами с помощью магнитного поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Отличие предлагаемого технического решения от выше изложенных заключается во введении двух цилидрообразных корпусов, что позволило осуществить намотку гибкой солнечной батареи непосредственно вокруг корпусов без применения дополнительных катушек. Введение четырех ММРД с волнообразными цилиндрическими поверхностями генерирующих пакеты тяг с заданными комбинациями их величин и направлений, позволило осуществить реверсивное вращение двух корпусов в сочетании с реверсивным перемещением их относительно друг друга. Это позволило с помощью ММРД с волнообразными цилиндрическими поверхностями многократно разворачивать и сворачивать в рулон СБ. Введение четырех дискообразных сканирующих лазерных дальномеров, работающих с обзором горизонта в 360° градусов, размещенных на торцах цилиндрообразных корпусов, позволило постоянно отслеживать расстояние между верхними и нижними торцами корпусов и угол наклона оси симметрии одного корпуса относительно другого, а также постоянно отслеживать расстояние до рядом расположенных БКА при сканировании окрестностей точки либрации одновременно несколькими БКА. Введение плоских катушек, соединенных с шинами электропитания расположенных на дне микроконтейнеров, позволило сформировать массив притягивающих электромагнитных полей для сбора и накопления исследуемых нано объектов с магнитными свойствами. Введение цилиндрического термоэлемента, соединенного с выдвижной П-образной штангой, соединенной с линейными шаговыми двигателями соединенными с плоскими шаговыми двигателями, позволило осуществить заварку одного или нескольких микроконтейнеров с собранными нанообъектами с равномерным прижатием термоэлемента к поверхностям завариваемых микроконтейнеров с нанесенными микрогранулами термоплавкого клея. Введение микрогранул термоплавкого клея, нанесенных на верхние части микроконтейнеров, позволило производить герметичное соединение материала герметизирующей пленки с материалом микроконтейнеров имеющих разные жаропрочные характеристики.
Техническим результатом является возможность активного сбора нанообъектов с магнитными свойствами с помощью магнитного поля и последующей конвейерной герметизации собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации, содержащий два корпуса, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми шинами, коллинеарной антенной, позиционной штрих-кодовой лентой, микроконтейнерами, в каждом из которых размещены жесткие диэлектрические микроподложки, также содержит мультивекторные матричные ракетные двигатели, выдвижные телескопические штанги, линейные шаговые двигатели, термоэлемент, герметизирующую пленку, солнечный датчик, датчик штрих-кода, два контроллера, два стабилизатора напряжения, приемопередатчик, четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре линейных шаговых двигателя, четыре выдвижные телескопические штанги; четыре дискообразные сканирующие лазерные дальномера, первый и второй плоские шаговые двигатели, первый и второй прижимные линейные шаговые двигатели, термоэлемент, выполненный цилиндрическим, П-образную штангу, выдвижную П-образную штангу, микрогранулы термоплавкого клея, нанесенные на края микроконтейеров, первый и второй корпуса выполнены цилиндрообразными, на их торцах закреплены первый, второй, третий, четвертый дискообразные сканирующие лазерные дальномеры, на торцах третьего и четвертого из которых размещены статоры первого и второго плоских шаговых двигателей, поворачивающиеся роторы которых соединены с первым и вторым прижимными линейными шаговыми двигателями, а через центральные сквозные отверстия первого и второго плоских шаговых двигателей проходят выдвижные телескопические штанги, соединенные с мультивекторными матричными ракетными двигателями с волнообразными цилиндрическими поверхностями, соединенные с цилиндрообразными корпусами, к боковым стенкам которых механически крепятся края герметизирующей пленки, наложенной с теневой стороны на полотно гибкой диэлектрической ленточной подложки, электропроводящие силовые шины которой соединены с тонкопленочными солнечными фотоэлементами и плоскими электромагнитными катушками, расположенными под жесткими диэлектрическими микроподложками, а информационная шина соединяет первый и второй контроллеры, размещенные в первом и втором цилиндрообразных корпусах, к торцам первого из которых прикреплена П-образная штанга с расположенным по середине солнечным датчиком, а второй корпус через первый и второй прижимные линейные шаговые двигатели, управляемые вторым контроллером, соединены с выдвижной П-образной штангой, проходящей через сквозное отверстие, расположенное по оси симметрии цилиндрического термоэлемента, для равномерного давления на запаиваемые герметизирующей пленкой микроконтейнеры с собранными нанообъектами.
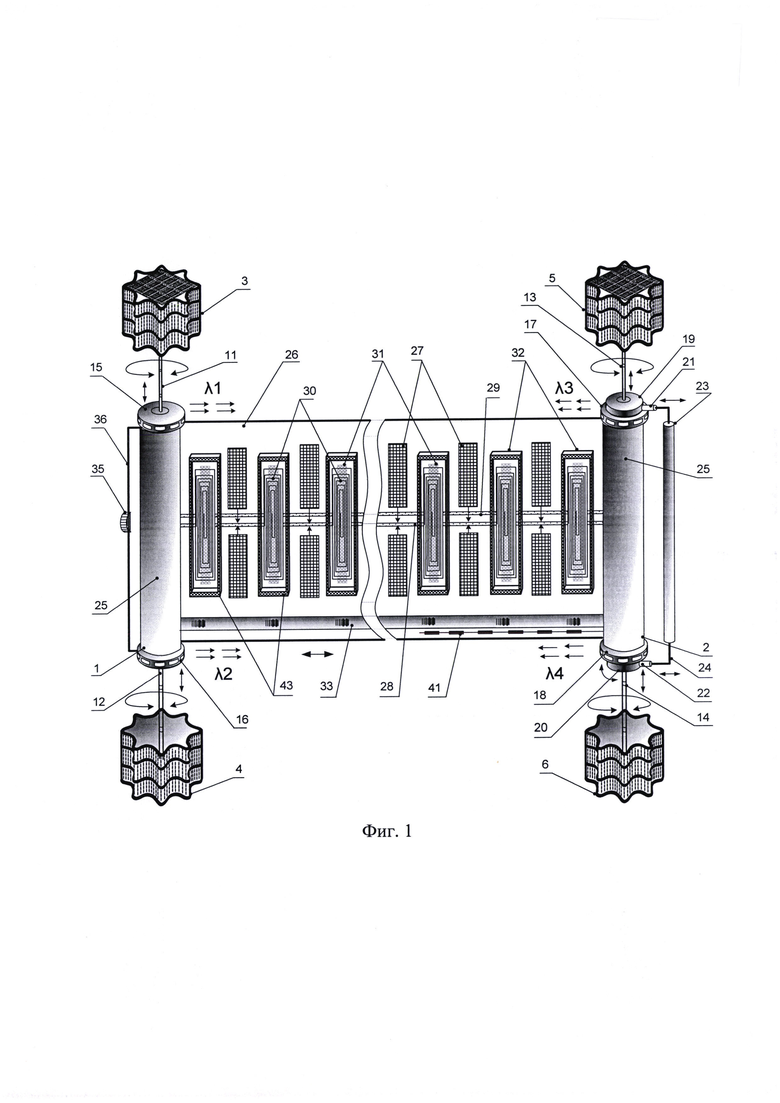
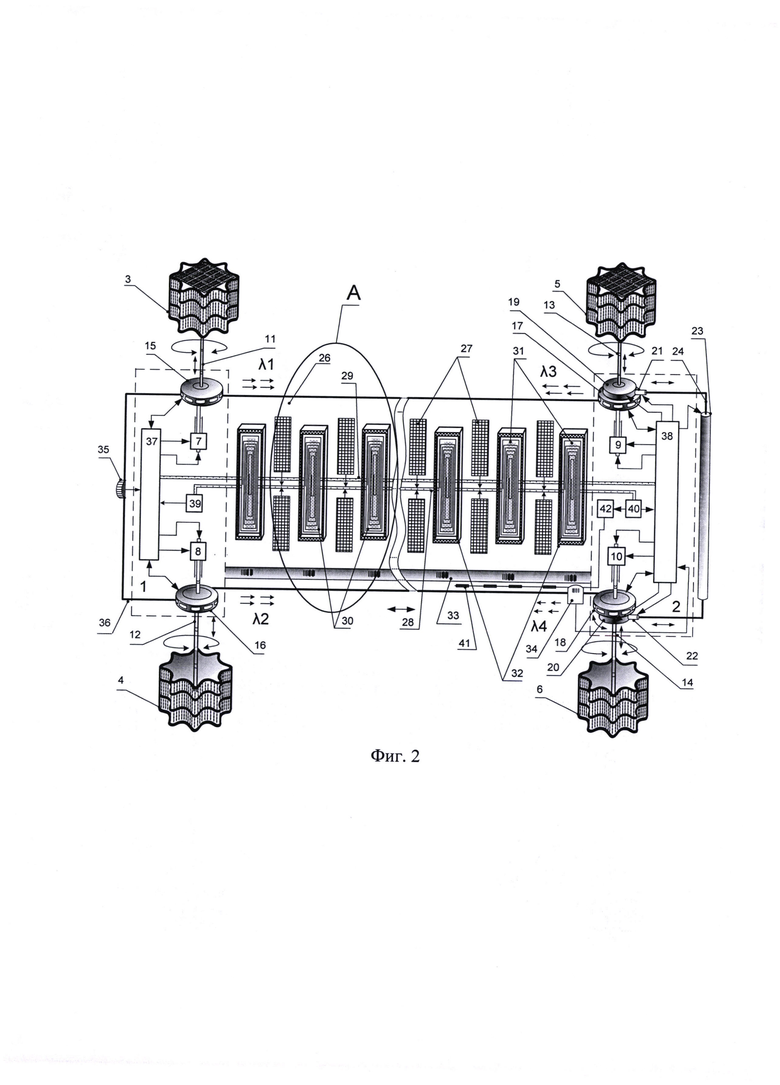
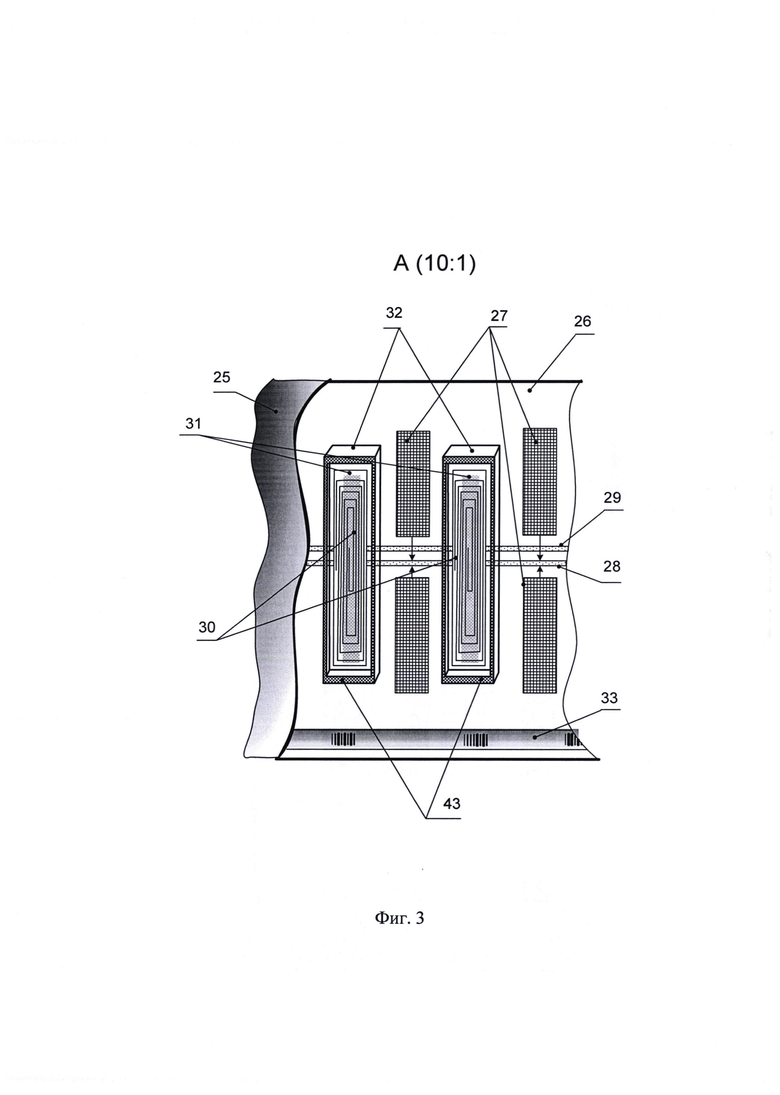
Сущность изобретения поясняется на Фиг. 1, где представлен бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации в момент развертывания гибкой ленточной СБ. На Фиг. 2 представлена структурная блок-схема бинарного космического аппарата для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации. На Фиг. 3 представлен выносной элемент А (10:1) в увеличенном масштабе, поясняющий топологию расположения на гибкой диэлектрической ленточной подложки тонкопленочных солнечных фотоэлементов относительно расположению микроконтейнеров для сбора и последующей герметизации собранных нанообъектов.
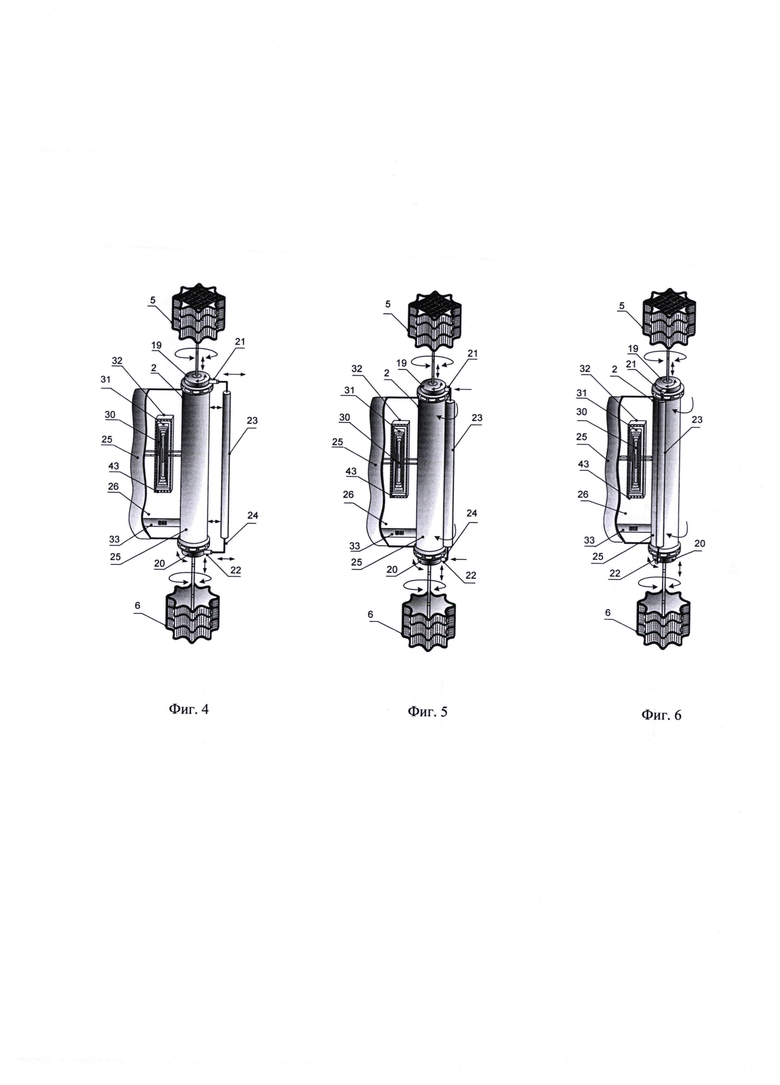
Фиг. 4 - Этап отвода термоэлемента от корпуса и переход в исходное положение. Фиг. 5 - Этап прижатия цилиндрического термоэлемента к герметизирующей пленке и разогрев микрогранул термоплавкого клея на поверхности микроконтейнера. Фиг. 6 - Этап герметизации - надавливание цилиндрическим термоэлементом на участок с расплавленным термоплавким клеем и перемещение по заданному угловому сектору для сварки герметизирующей пленки с выступающими частями одного или нескольких микроконтейнеров.
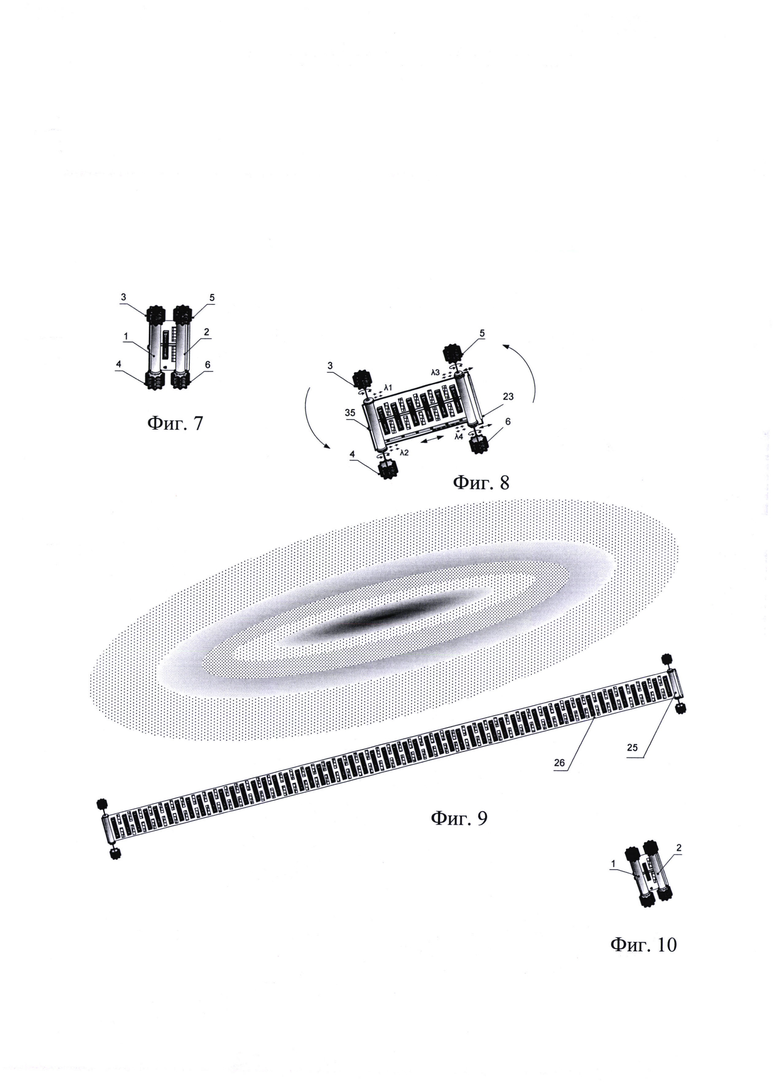
На Фиг. 7, Фиг. 8 - схематично поясняются этапы развертывания БКА. На Фиг. 9 - этап сканирования окрестности точки либрации, сбор и герметизация собранных нанообъектов. На Фиг. 10, - этап свертывание БКА.
Бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации содержит: (Фиг. 1, Фиг. 2) первый 1 и второй 2 цилиндрообразные корпуса, первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели, первую 11, вторую 12, третью 13, четвертую 14 выдвижные телескопические штанги; первый 15, второй 16, третий 17, четвертый 18 дискообразные сканирующие лазерные дальномеры, первый 19 и второй 20 плоские шаговые двигатели, первый 21 и второй 22 прижимные линейные шаговые двигатели, цилиндрический термоэлемент 23, выдвижную П-образную штангу 24, герметизирующую пленку 25 (Фиг. 1), гибкую диэлектрическую ленточную подложку 26, тонкопленочные солнечные фотоэлементы 27, силовые шины 28, информационную шину 29, плоские электромагнитные катушки 30 (Фиг. 3), жесткие диэлектрические микроподложки 31, микроконтейнеры 32, позиционную штрих-кодовую ленту 33, датчик штрих-кода 34, солнечный датчик 35, П-образную штангу 36, первый 37 и второй 38 контроллеры, первый 39 и второй 40 стабилизаторы напряжения, коллинеарную антенну 41, приемопередатчик 42, микрогранулы термоплавкого клея 43 (Фиг. 3). На фиг. 2, в границах замкнутых пунктирных линий, расположены элементы, конструктивно размещенные в первом 1 и втором 2 цилиндрообразных корпусах. λI, λ2, λЗ, λ4 - выделенные длинны волн электромагнитного излучения оптического диапазона, излучаемые первым 15, вторым 16, третьим 17, четвертым 18 дискообразными сканируемыми лазерными дальномерами.
Гибкая диэлектрическая ленточная подложка 26 (Фиг. 3) армирована диэлектрическими замкнутыми упорядоченными прямоугольными ребрами жесткости в виде бортиков, образующих на поверхности гибкой диэлектрической ленточной подложки 26 множество прямоугольных, открытых сверху планарных микроконтейнеров 32. Жесткие диэлектрические микроподложки 31 выполнены шириной меньше радиуса цилиндрообразного корпуса 1 и 2 для уменьшения асимметрии формы рулона при проведении многослойной намотки. Магнитное поле создается с помощью плоских электромагнитных катушек 30, при протекании тока через которые создается электромагнитное поле, притягивающее ферромагнитные нанообъекты. Плоские электромагнитные катушки 30 расположены под жескими диэлектрическими подложками 31.
Для исключения попадания Земных наночастиц, планарные микроконтейнеры 32 сверху завариваются герметизирующей пленкой 25 в космосе и послойно, вместе с гибкой диэлектрической ленточной подложкой 26, на которой они нанесены, наматываются на второй цилиндрообразный корпус 2. Герметизирующая пленка 25 в исходном положении расположена с теневой стороны (с обратной стороны солнечных фотоэлементов) гибкой диэлектрической ленточной подложкой 26 и повторяет ее геометрическую форму. Идентификационный штрих-код, нанесенный на позиционную лену 33 под каждым планарным микроконтейнером 32, позволяет определить время его запайки и по нему определить координаты интервалов траекторий, в которых были собраны интересующие наноразмерные объекты. Это позволяет маркировать кластеры собранных нанообъетов, например, в зонах либрации L4 и L5 в системе Земля-Луна, для топологического анализа распределения нанообъектов в облокоподобных пылевых структурах при их линейном или спиралевидном сканировании.
Для осуществления изобретения могут быть использованы, например, известные технологии изготовления компонентов. В качестве мультивекторного матричного ракетного двигателя (ММРД) с волнообразной цилиндрической поверхностью может быть использована мультивекторная матричная ракетная двигательная система с цифровым управлением величины и направления тяги, которая состоит из плоской дискообразной с волнообразным внешним контуром монолитной термостойкой диэлектрической подложки с размещенными на ней квадратной матричной реверсивной структурой двигательных ячеек, соединенной с повторяющим ее контур цилиндрообразной полой с волнообразным профилем монолитной термостойкой диэлектрической подложкой с радиально-веерной ориентацией всех продольных осей конусообразных микропор на центры чередующихся сопряженных вогнутых и выпуклых полуокружностей, образующих в совокупности замкнутую волнообразную внешнею поверхность. Все конусообразные микропоры заполнены твердым топливом и ранжированы по объему в пропорциях последовательных степенях числа два (1-2-4-8-16-32), обеспечивающих генерацию множества разнонаправленных векторов тяги с прецизионным цифровым управлением в двоичном коде величиной тяги каждой ячейки [6].
При изготовлении СБ могут быть использованы известные технологии изготовления гибких солнечных тонкопленочных батарей, выполненных на базе гибкой подложки с нанесенными тонкопленочными фотогальваническими элементами, изготовленными, по меньшей мере, из аморфного кремния (a-Si), теллурида кадмия (CdTe), арсенида галлия (GaAs) [3].
Устройство работает следующим образом: после доставки БКА в точку либрации включаются первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели, осуществляющие выдвижение первой 11, второй 12, третей 13, четвертой 14 телескопических штанг, отводящие первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразной цилиндрической поверхностью от торцов первого 1 и второго 2 цилиндрообразных корпусов. Первый 21 и второй 22 прижимные линейные шаговые двигатели отводят цилиндрический термоэлемент 23 от цилиндрообразного корпуса 2 (Фиг. 4). Одновременно включаются первый 15, второй 16, третий 17, четвертый 18 дискообразные сканирующие лазерные дальномеры, работающие на выделенных длинах волн λ1, λ2, λЗ, λ4 для исключения влияния помех от активных или пассивных источников. После проверки работоспособности первого 15, второго 16, третьего 17, четвертого 18 дискообразных сканирующих лазерных дальномеров включаются первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, которые создают вращение первого 1 и второго 2 цилиндрообразных корпусов, разматывая свернутую в рулон гибкую диэлектрическую ленточную подложку 26 СБ, с одновременным удалением одного цилиндрообразного корпуса от другого, растягивая полотно СБ в противоположные стороны для исключения провисания (Фиг. 8). После развертывания на требуемую длину (Фиг. 9) гибкой диэлектрической ленточной подложки 26 с тонкопленочными солнечными фотоэлементами 27, БКА переходит в режим ориентации и слежения за Солнцем. Поворот плоскостей гибкой диэлектрической ленточной подложки в направлении Солнца и одновременное оптимальное натяжение их осуществляется с помощью первого 3, второго 4 и третьего 5. четвертого 6 ММРД с волнообразными цилиндрическими поверхностями, осуществляющие сближение или удаление, или изменение угла наклона, соответственно, первого 1 или второго 2 цилиндрообразных корпусов. Согласно коду координат Солнца, полученных от солнечного датчика 35 и информации, поступающей с первого 15, третьего 17 и второго 16, четвертого 18 дискообразных сканирующих лазерных дальномеров о расстоянии и углах осей между первым 1 и вторым 2 цилиндрообразными корпусами, осуществляются синхронные угловые повороты первого 1 и второго 2 цилиндрообразных корпусов, без изменения расстояния между ними (Фиг. 9). На гибкой диэлектрической ленточной подложки 26, кроме тонкопленочных солнечных фотоэлементов 27 и соединяющих их силовых шин 28, также нанесены коллинеарная антенна 41 и проводной двунаправленный канал связи в виде информационной шины 29 для обмена информацией между первым 37 и вторым 38 контроллерами.
Для втягивания нанообъектов с магнитными свойствами, на гибкой диэлектрической подложке 26 размещены плоские электромагнитные катушки 30 (Фиг. 3), расположенные под жесткими диэлектрическими микроподложками 31, на которых осаждаются ферромагнитные нанообъекты накапливаемые на дне каждого микроконтейнера 32. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 27, поступает на плоские катушки 30, создающие магнитное поле для втягивания (забора) нанообъектов с магнитными свойствами, а также магнитных наночастиц в сочетании с нейтрально заряженными структурами (например, ферромагнитные наносферы, в порах которых расположены замерзшие коллоидные растворы). Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 27, также поступает на входы первого 39 и второго 40 стабилизаторов напряжения, которые выдают стабилизированные напряжения для питания приемопередатчика 42, для зарядки аккумуляторов первого 37 и второго 38 контроллеров и обеспечения электропитанием всех датчиков и двигателей. По мере сканирования облачных пылевых структур происходит последовательная герметизация микроконтейнеров 32. Герметизация собранных нанообъектов происходит следующим образом. Цилиндрический термоэлемент 23 с помощью первого 21 и второго 22 прижимных линейных шаговых двигателей, работающих синхронно, прижимается параллельно к второму цилиндрическому корпусу 2, вторым 38 контроллером включается режим нагрева цилиндрического термоэлемента 23 и через герметизирующею пленку 25 (температура плавления которой ваше температуры плавления термоплавкого клея) нагревает микрогранулы термоплавкого клея 43 (Фиг. 3), напыленные на верхние части боковых стенок микроконтейнеров 32. В результате нагрева микрогранулы термоплавкого клея 43 плавятся, приобретая адгезионные свойства, склеивают поверхность микроконтейнеров 32 с поверхностью герметизирующей пленки 25 (Фиг. 5). Одновременно первый 19 и второй 20 плоские шаговые двигатели поворачивают цилиндрический термоэлемент 23 вокруг оси корпуса 2 на определенный угол и за определенный временной интервал, определяемые программой второго контроллера 38 для герметизации одного или нескольких микроконтейнеров 32. После завершения цикла герметизации (термосклеивание с использованием температуры и давления) первый 19 и второй 20 плоские шаговые двигатели переводят цилиндрический термоэлемент 23 в исходное угловое положение, а первый 21 и второй 22 прижимные линейные шаговые двигатели отводят цилиндрический термоэлемент 23 от второго 2 цилиндрообразного корпуса (Фиг. 4) для подмотки гибкой диэлектрической ленточной подложки 26 и начала герметизации следующих микроконтейнеров 32.
На Фиг. 7 - Фиг. 8 - схематично поясняются этапы развертывания БКА. На Фиг. 9 - этап сканирования окрестности точки либрации сбор и герметизация собранных нанообъектов. На Фиг. 10 - этап свертывание БКА. Фиг. 7, первый этап - тестирование дальномеров и электронного оборудования. Фиг. 8, второй этап - выдвижение двигателей и ориентация положения БКА на Солнце. Фиг. 9, третий этап - развертывание гибкой подложки с размещенными фотоэлементами и микроконтейнерами для забора внеземных нанообъектов и перемещение БКА по окрестности точки либрации, а также сбор нанообъектов за счет притяжения их к поверхностям жестких диэлектрических микроподложек, расположенных в открытых микроконтейнерах, и последующая герметизация открытых частей микроконтейнеров с собранным наноматериалом запайкой герметизирующей пленкой. Схематически многослойное сканируемое пылеобразное облако изображено на заднем плане. Фиг. 10, четвертый этап - полное свертывание гибкой подложки в рулон и переход системы в энергоэкономичный режим ожидания транспортного космического аппарата для перемещения собранных нанообъектов в исследовательскую лабораторию электронной и зондовой микроскопии, расположенной на Земле или на орбитальной станции в космосе.
Предложенная конструкция бинарного космического аппарата для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации позволяет: развернуть и свернуть поисковое гибкое ленточное полотно большой площади между двумя растягивающими ее маневровыми ММРД с волнообразными цилиндрическими поверхностями. Осуществить сочетание сканирования по поисковой траектории исследуемой пылеоблачной структуры с одновременным активным сбором нанообъектов с магнитными свойствами, попавших в зону притяжения магнитного поля. Реализовать конвейерную герметизацию собранных на жесткие микроподложки нанообъектов с магнитными свойствами, размещенных в микроконтейнерах, в сочетании со свертыванием в компактный, транспортируемый рулон гибкого ленточного полотна, что ранее невозможно было осуществить с помощью известных конструкций малоразмерных космических аппаратов.
Источники информации
1. Патент на изобретение RU 2691686 С1, 17.06.2019, G01N 1/02, B64G 4/00, Способ забора и доставки на Землю проб космической пыли из окрестностей точек либрации системы Земля-Луна и комплекс средств для его реализации / Цыганков О.С.
2. Патент на изобретение RU 2723899 С1, 18.06.2020, G01Q 60/24, B82Y 35/00, СКАНИРУЮЩИЙ ЗОНД АТОМНО-СИЛОВОГО МИКРОСКОПА С ОТДЕЛЯЕМЫМ ТЕЛЕУПРАВЛЯЕМЫМ НАНОКОМПОЗИТНЫМ ИЗЛУЧАЮЩИМ ЭЛЕМЕНТОМ, ЛЕГИРОВАННЫМ КВАНТОВЫМИ ТОЧКАМИ, АПКОНВЕРТИРУЮЩИМИ И МАГНИТНЫМИ НАНОЧАСТИЦАМИ СТРУКТУРЫ ЯДРО-ОБОЛОЧКА / Линьков В.А., Гусев С.И., Вишняков Н.В., Линьков Ю.В., Линьков П.В.
3 Patent US 9758260 В2, Sep. 12, 2017, B64G 1/22, B64G 1/10, LOW VOLUME MICRO SATELLITE WITH ELEXIBLE WINDED PANELS EXPANDABLE AFTER LAUNCH.
4. Патент на полезную модель RU 202757 U1, 04.03.2021, B64G 1/22, В82В 1/00, БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ПОИСКА И СБОРА ВНЕЗЕМНЫХ ОБЪЕКТОВ СО СВОЙСТВАМИ КВАНТОВЫХ ТОЧЕК В ОКРЕСТНОСТЯХ ТОЧЕК ЛИБРАЦИИ / Линьков В.А.
5. Патент на изобретение RU 2744277 С1, 04.03.2021, B64G 1/22, БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ПОИСКА И СБОРА ВНЕЗЕМНЫХ ОБЪЕКТОВ СО СВОЙСТВАМИ КВАНТОВЫХ ТОЧЕК В ОКРЕСТНОСТЯХ ТОЧЕК ЛИБРАЦИИ / Линьков В.А.
6. Патент на изобретение RU 2707474 С1, 26.11.2019, F02K 9/95, B64G 1/40, МУЛЬТИВЕКТОРНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ И НАПРАВЛЕНИЕМ ТЯГИ ДВИГАТЕЛЬНЫХ ЯЧЕЕК ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.
Изобретение относится к области космической техники, а более конкретно к малоразмерным исследовательским бинарным космическим аппаратам (БКА). БКА для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации содержит два цилиндрообразных корпуса, четыре мультивекторных матричных ракетных двигателя (ММРД). Снабжен гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон. Содержит четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями. Электропроводящие силовые шины соединены с тонкопленочными солнечными фотоэлементами и плоскими электромагнитными катушками. Достигается сбор нанообъектов с магнитными свойствами. 10 ил.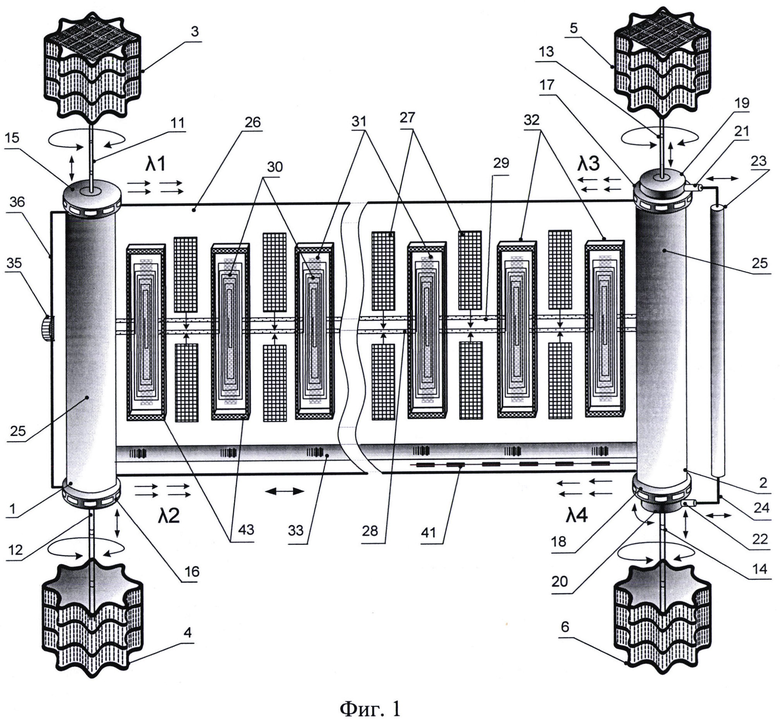
Бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации, содержащий два корпуса, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными силовыми шинами, коллинеарной антенной, позиционной штрих-кодовой лентой, микроконтейнерами, в каждом из которых размещены жесткие диэлектрические микроподложки, также содержит мультивекторные матричные ракетные двигатели, выдвижные телескопические штанги, линейные шаговые двигатели, термоэлемент, герметизирующую пленку, солнечный датчик, датчик штрих-кода, два контроллера, два стабилизатора напряжения, приемопередатчик, отличающийся тем, что содержит четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре линейных шаговых двигателя, четыре выдвижные телескопические штанги; четыре дискообразных сканирующих лазерных дальномера, первый и второй плоские шаговые двигатели, первый и второй прижимные линейные шаговые двигатели, термоэлемент, выполненный цилиндрическим, П-образную штангу, выдвижную П-образную штангу, микрогранулы термоплавкого клея, нанесенные на края микроконтейеров, первый и второй корпуса выполнены цилиндрообразными, на их торцах закреплены первый, второй, третий, четвертый дискообразные сканирующие лазерные дальномеры, на торцах третьего и четвертого из которых размещены статоры первого и второго плоских шаговых двигателей, поворачивающиеся роторы которых соединены с первым и вторым прижимными линейными шаговыми двигателями, а через центральные сквозные отверстия первого и второго плоских шаговых двигателей проходят выдвижные телескопические штанги, соединенные с мультивекторными матричными ракетными двигателями с волнообразными цилиндрическими поверхностями, соединенные с цилиндрообразными корпусами, к боковым стенкам которых механически крепятся края герметизирующей пленки, наложенной с теневой стороны на полотно гибкой диэлектрической ленточной подложки, электропроводящие силовые шины которой соединены с тонкопленочными солнечными фотоэлементами и плоскими электромагнитными катушками, расположенными под жесткими диэлектрическими микроподложками, а информационная шина соединяет первый и второй контроллеры, размещенные в первом и втором цилиндрообразных корпусах, к торцам первого из которых прикреплена П-образная штанга с расположенным по середине солнечным датчиком, а второй корпус через первый и второй прижимные линейные шаговые двигатели, управляемые вторым контроллером, соединены с выдвижной П-образной штангой, проходящей через сквозное отверстие, расположенное по оси симметрии цилиндрического термоэлемента, для равномерного давления на запаиваемые герметизирующей пленкой микроконтейнеры с собранными нанообъектами.
| УСТАНОВКА ДЛЯ СКАТКИ И РАСКАТКИ СЕТКИДЛЯ БУЛ\ | 0 |
|
SU198984A1 |
| US 9758260 B2, 12.09.2017 | |||
| СПОСОБ РАЗДЕЛЕНИЯ ПОЛИДИСПЕРСНЫХ ЧАСТИЦ В МИКРОННОМ И НАНОРАЗМЕРНОМ ДИАПАЗОНЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2568898C1 |

