Изобретение относится к исследовательским малоразмерным бинарным космическим аппаратам (БКА), весом менее 1000 грамм, предназначенным для поиска, сбора и анализа в космическом пространстве наноразмерных объектов внеземного происхождения, скопления которых расположены в окрестностях точек либрации (точек Лагранжа) в виде пылевых облакоподобных структур (например, пылевые облака Кордылевского в системе Луна-Земля). Цель исследований - на основании физико-химического анализа собранных БКА нанообъектов внеземного происхождения, обладающих флуоресценцией, осуществить лабораторный синтез подобных нанообъектов с новыми свойствами, не встречающимися на Земле.
Используемое в описании изобретения словосочетание «бинарный космический аппарат» (БКА) понимается как космический аппарат, состоящий из двух корпусов и общей армированной гибкой ленточной солнечной батареи, расположенной между ними, разворачиваемый за счет разматывания солнечной батареи, смотанной в рулон, при реверсивном перемещении одного корпуса относительно другого в противоположные стороны и обратно, осуществляемом с помощью мультивекторных матричных ракетных двигателей (ММРД). Гибкая ленточная солнечная батарея (СБ) - это гибкая диэлектрическая ленточная подложка, на которую нанесен массив соединенных между собой тонкопленочных солнечных фотоэлементов в сочетании с микроконтейнерами для сбора нанообъектов. Точки либрации - это точки, где гравитационное и центробежное ускорения, воздействующие на помещенное в окрестностях точки тело, уравновешиваются, в связи с чем так называемые «малые тела» могут там накапливаться [1].
Нанообъекты - отдельные наночастицы размером в интервале 2-100 нанометров и системы наночастиц, образующие однородные или неоднородные многозвенные конструкции, размеры которых меньше 2000 нанометров. В зависимости от размера и материала, из которого образовались нанообъекты, они могут обладать свойствами реагирования на магнитные или электрические поля, в зависимости от окружающих факторов изменять свою полярность мгновенно или сохранять ее постоянно, переходить из одного физического состояния в другое, например, от воздействия световых или рентгеновских фотонов преобразовывать длины волн электромагнитного излучения [2].
Известен бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек и апконвертируемых наночастиц в окрестностях точек либрации, содержащий два панелеобразные корпуса, соединенных с контейнерами, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрихкодовой лентой, микроконтейнерами, в каждом из которых размещены пленочные электроды и жесткие диэлектрические микроподложки, также содержит два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, шесть реверсивных шаговых двигателя, четыре катушки для размещения гибкой диэлектрической ленточной подложки и герметизирующей пленки, термоэлемент для заварки микроконтейнеров с собранными нанообъектами, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, датчик штрихкода, два дисковых токосъемника, два контроллера, два стабилизатора напряжения, высоковольтный источник питания приемопередатчик [3].
Недостатком устройства является отсутствие возможности коррекции траектории поиска в зависимости от результатов экспресс-анализа флуоресцентных свойств внеземных нанобъектов с различными физическими свойствами, собранных раздельно с помощью электрического и магнитного поля, с последующей конвейерной герметизацией собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Наиболее близким по технической сущности является бинарный космический аппарат для поиска и сбора внеземных нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, содержащий два цилиндрообразных корпуса, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрихкодовой лентой, микроконтейнерами, пленочными электродами, плоскими электромагнитными катушками, жесткими диэлектрическими микроподложками, также содержит четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре выдвижные телескопические штанги, четыре линейных шаговых двигателя, цилиндрический термоэлемент, герметизирующую пленку, солнечный датчик, датчик штрихкода, два контроллера, два стабилизатора напряжения, высоковольтный источник питания, приемопередатчик, четыре дискообразных сканирующих лазерных дальномера, навигационную звездную камеру, четыре плоских шаговых двигателя, два прижимных линейных шаговых двигателя, П-образную штангу, выдвижную П-образную штангу, микрогранулы термоплавкого клея, нанесенные на края микроконтейеров [4].
Недостатком устройства является отсутствие возможности коррекции траектории поиска в зависимости от результатов экспресс-анализа флуоресцентных свойств внеземных нанобъектов с различными физическими свойствами, собранных раздельно с помощью электрического и магнитного поля, с последующей конвейерной герметизацией собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Введение дисковых солнечных датчиков, размещенных на П-образной штанге и установленных перпендикулярно друг к другу плоскими поверхностями, позволило производить ориентацию солнечных батарей одновременно с развертыванием или свертыванием БКА. Введение жестких прозрачных диэлектрических микроподложек, прозрачных пленочных электродов, прозрачных плоских электромагнитных катушек позволило создать электрические и электромагнитные поля с помощью элементов, не препятствующих прохождению через них фотонов света. Введение пленочных оптических затворов позволило сформировать короткие световые импульсы возбуждения исследуемых нанообъектов и по их заднему фронту осуществить измерение интегрированной длительности флуоресценции нанообъектов, расположенных на жестких прозрачных диэлектрических микроподложках. Введение пленочных перестраиваемых электрооптических фильтров позволило последовательно выделять из спектра солнечного света длины волн, которые способны возбуждать флуоресценцию исследуемых в космосе нанообъектов. Введение планарных фотоприемников, расположенных в непосредственной близости от затемненных жестких прозрачных диэлектрических микроподложек, позволило регистрировать слабую флюоресценцию в паузах между световыми импульсами возбуждения нанообъектов. Введение эластичных пружинящих держателей фотоприемников позволило после развертывания СБ приподнять активные элементы планарных фотоприемников над жесткими прозрачными диэлектрическими микроподложками для увеличения сектора обзора площади жестких прозрачных диэлектрических микроподложек и равномерного распределения флуоресцирующих нанообъектов на ее площади при втягивании их в микроконтейнеры электрическими или магнитными полями. Введение шины управления перестраиваемыми электрооптическими фильтрами и оптическими затворами позволило подвести сигналы открытия и закрытия пленочных оптических затворов к контроллерам, а введение и подключение шин сигналов откликов с планарных фотоприемников позволило регистрировать контроллерам электрические сигналы откликов на оптические импульсы возбуждения флуоресцирующих нанообъектов, сформированные пленочными оптическими затворами. Введение гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами, выполняющей функции солнцезащитного щита, позволило создать зону тени для фиксации слабой флуоресценции пойманных нанообъектов с возможностью возбуждения их управляемыми импульсами света определенной длины волны, прошедшими через оптические окна (открываемые и закрываемые с помощью пленочных оптических затворов). Введение новых элементов также позволяет: производить коррекцию траектории сканирования при обнаружении скопления флуоресцирующих нанообъектов; сравнить результаты экспресс-анализов космических исследований, полученных в гравитационно-сбалансированных зонах, с результатами исследований, полученными на Земле; передать по радиоканалу большую часть результатов исследований на Землю в реальном масштабе времени для исключения потери всех результатов космических исследований в случае аварии при транспортировке нанообъектов на Землю.
Техническим результатом является возможность коррекции траектории поиска в зависимости от результатов экспресс-анализа флуоресцентных свойств внеземных нанообъектов с различными физическими свойствами, собранных раздельно с помощью электрического и магнитного полей, с последующей конвейерной герметизацией собранных нанообъектов при сканировании окрестностей точек либрации планет, входящих в Солнечную систему.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: бинарный космический аппарат для поиска, сбора и анализа внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, содержащий два цилиндрообразных корпуса, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрихкодовой лентой, микроконтейнерами, пленочными электродами, плоскими электромагнитными катушками, жесткими диэлектрическими микроподложками, также содержит четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре выдвижные телескопические штанги, четыре линейных шаговых двигателя, цилиндрический термоэлемент, герметизирующую пленку, солнечный датчик, датчик штрихкода, два контроллера, два стабилизатора напряжения, высоковольтный источник питания, приемопередатчик, четыре дискообразных сканирующих лазерных дальномера, навигационную звездную камеру, четыре плоских шаговых двигателя, два прижимных линейных шаговых двигателя, П-образную штангу, выдвижную П-образную штангу, микрогранулы термоплавкого клея, нанесенные на края микроконтейнеров, гибкую диэлектрическую ленточную с оптическими окнами подложку с нанесенными с теневой стороны шинами сигналов откликов с планарных фотоприемников и шиной управления перестраиваемыми электрооптическими фильтрами и оптическими затворами, пленочные электроды, плоские электромагнитные катушки и жесткие диэлектрические микроподложки, выполненные прозрачными, пленочные перестраиваемые электрооптические фильтры, пленочные оптические затворы, планарные фотоприемники, эластичные держатели планарных фотоприемников, первый и второй дисковые солнечные датчики, расположенные плоскостями перпендикулярно друг другу и закрепленные на П-образной штанге, герметизирующую пленку, выполненную прозрачной, гибкую диэлектрическую ленточную подложку, выполненную светонепроницаемой с чередующимися между тонкопленочными солнечными элементами, оптическими окнами с формой, повторяющей форму жестких прозрачных диэлектрических микроподложек, с шагом чередования, равным шагу размещенных микроконтейнеров, с закрепленными эластичными держателями фотоприемников, с внутренней стороны которых закреплены планарные фотоприемники, соединенные с шиной сигналов откликов с планарных фотоприемников, фоточувствительные области которых направлены на расположенные на дне микроконтейнеров исследуемые нанообъекты, притянутые электрическим или электромагнитным полем на внешние поверхности жестких прозрачных диэлектрических микроподложек, лежащих в зависимости от вида притягивающего поля на пленочных прозрачных электродах или на прозрачных плоских электромагнитных катушках, лежащих на последовательно расположенных пленочных перестраиваемых электрооптических фильтрах и пленочных оптических затворах, входы которых соединены через шину управления перестраиваемыми электрооптическими фильтрами и оптическими затворами с управляющими выходами первого и второго контроллеров, измерительные входы которых соединены с шиной сигналов откликов с планарных фотоприемников.
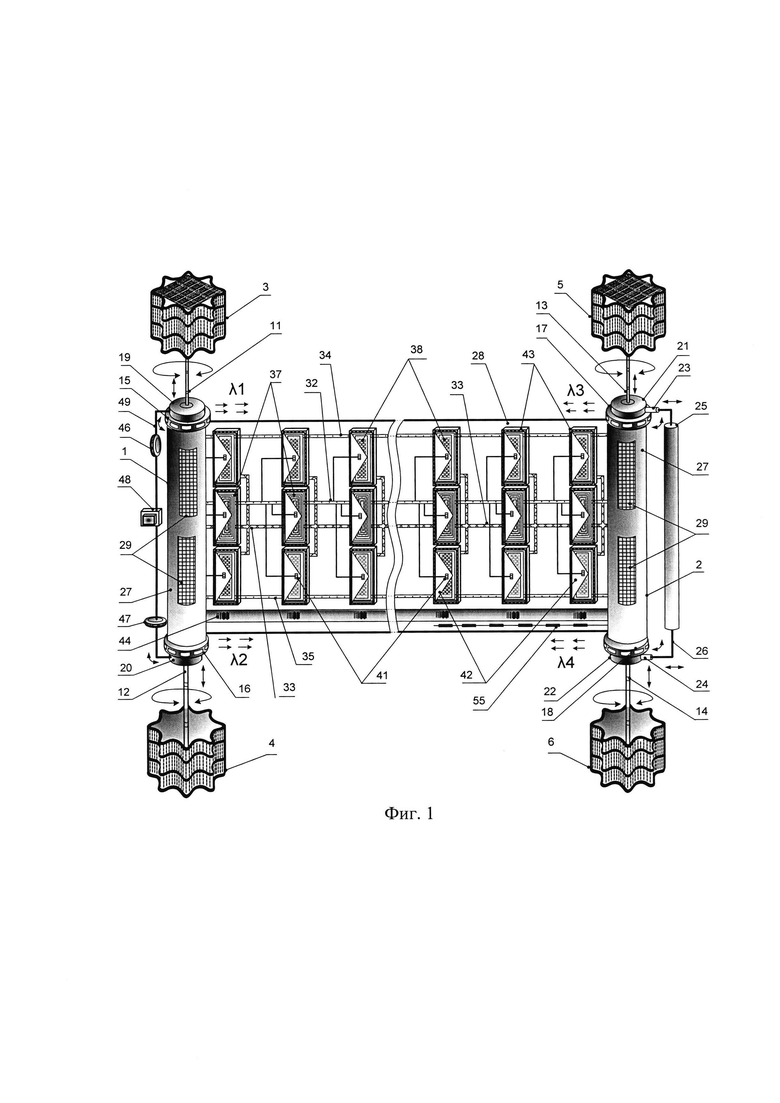
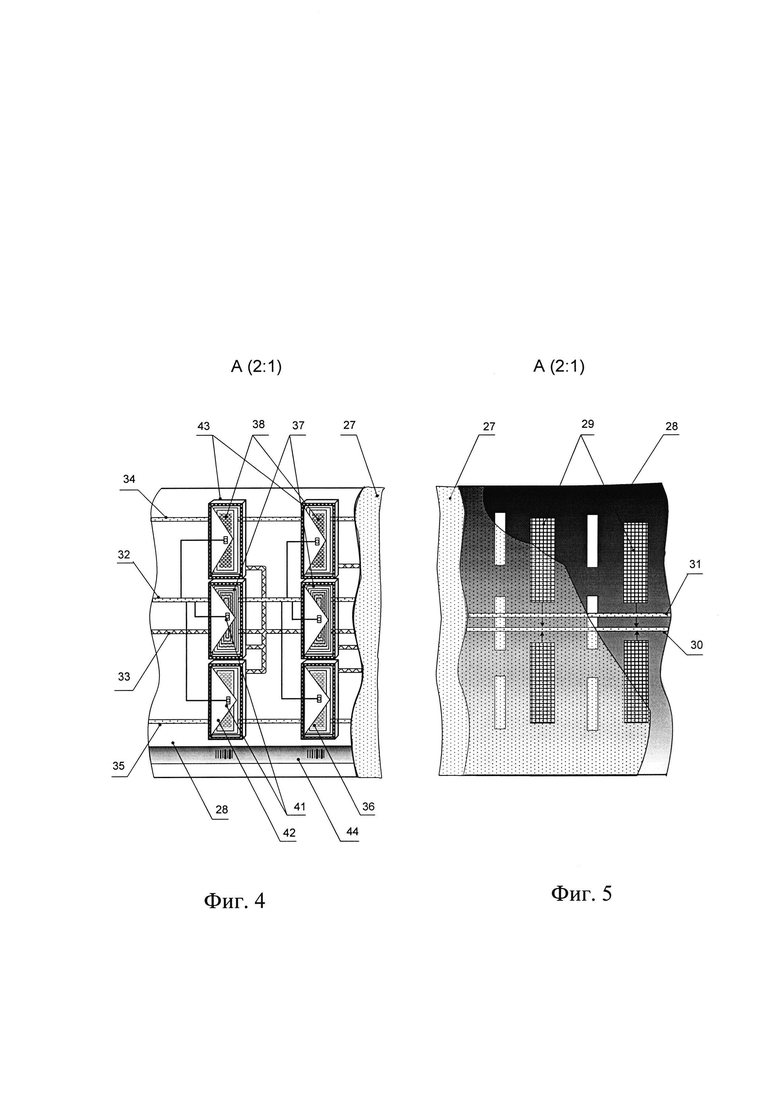
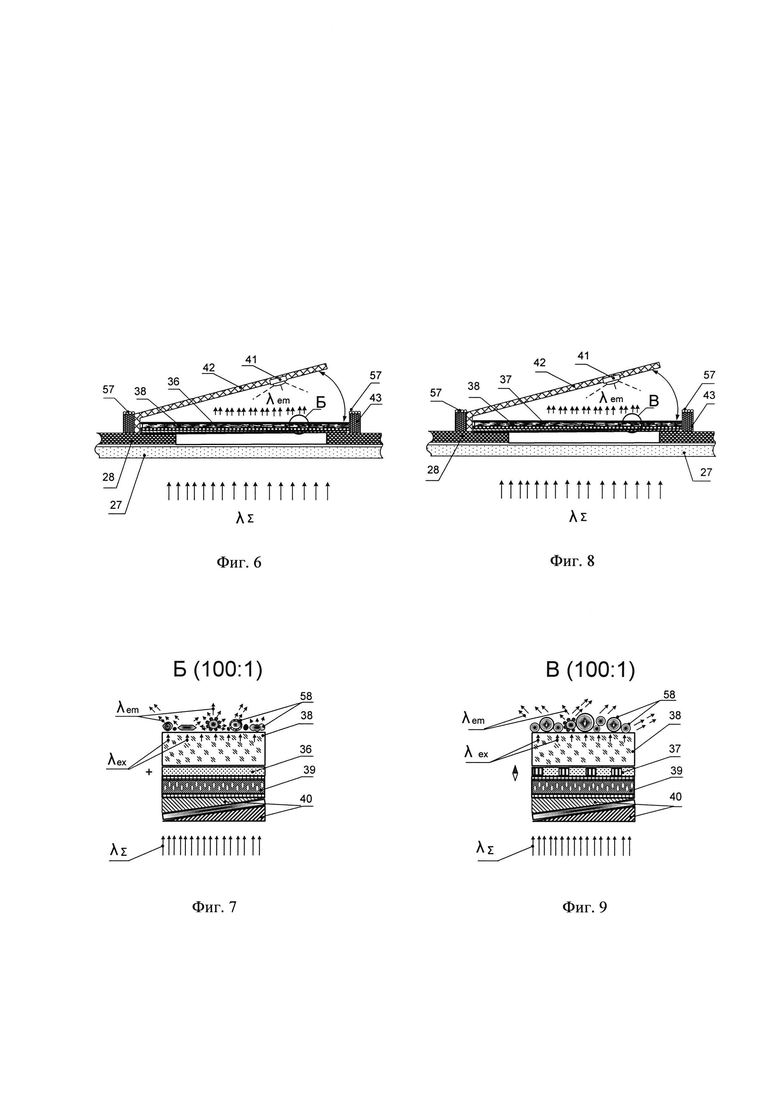
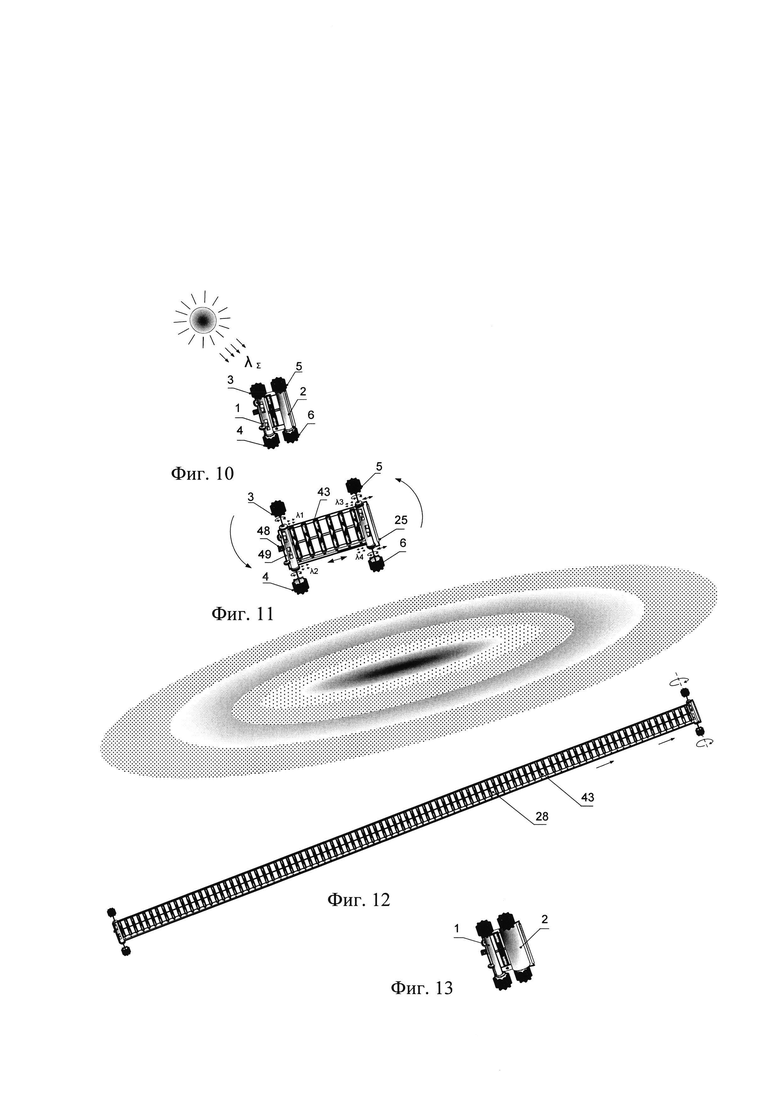
Сущность изобретения поясняется на фиг. 1 и фиг. 2, где представлен бинарный космический аппарат (БКА) для поиска, сбора и анализа внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, в момент развертывания гибкой ленточной СБ. (фиг. 1 - вид с теневой стороны БКА, фиг. 2 - вид с солнечной стороны БКА). На фиг. 3 представлена структурная блок-схема бинарного космического аппарата для поиска, сбора и анализа внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему. На фиг. 4 и фиг. 5 представлен выносной элемент А (2:1) (фиг. 4 - вид с теневой стороны БКА, фиг. 5 - вид с солнечной стороны БКА) в увеличенном масштабе, поясняющий топологию расположения на гибкой диэлектрической ленточной подложке электропроводящих шин и микроконтейнеров для сбора и последующей герметизации собранных нанообъектов. На фиг. 6 представлен в разрезе микроконтейнер для сбора нанообъектов с помощью электрического поля, соединенный с держателем планарного фотоприемника и светонепроницаемой гибкой диэлектрической ленточной подложкой с оптическими окнами. На фиг. 7 представлен в разрезе микроконтейнер для сбора нанообъектов с магнитными свойствами, соединенный с держателем планарного фотоприемника и светонепроницаемой гибкой диэлектрической ленточной подложкой с оптическими окнами. На фиг. 8 представлен выносной элемент Б (100:1) в увеличенном масштабе и разрезе, поясняющий последовательность расположения функциональных слоев на жесткой прозрачной диэлектрической микроподложке, создающей электрическое поле. На фиг. 9 представлен выносной элемент В (100:1) в увеличенном масштабе и разрезе, поясняющий последовательность расположения функциональных слоев на жесткой прозрачной диэлектрической микроподложке, создающей электромагнитное поле. На фиг. 10, фиг. 11 - схематично поясняются этапы развертывания БКА. На фиг. 12 - этап сканирования окрестности точки либрации, сбор и герметизация собранных нанообъектов. На фиг. 13 - этап свертывание БКА.
Бинарный космический аппарат для поиска, сбора и анализа внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, содержит: (фиг. 1, фиг. 2) первый 1 и второй 2 цилиндрообразные корпуса, первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели (фиг. 3), первую 11, вторую 12, третью 13, четвертую 14 выдвижные телескопические штанги, первый 15, второй 16, третий 17, четвертый 18 дискообразные сканирующие лазерные дальномеры, первый 19, второй 20, третий 21, четвертый 22 плоские шаговые двигатели, первый 23 и второй 24 прижимные линейные шаговые двигатели, цилиндрический термоэлемент 25, выдвижную П-образную штангу 26, прозрачную герметизирующую пленку 27 (фиг. 2), гибкую светонепроницаемую диэлектрическую ленточную подложку с оптическими окнами 28, тонкопленочные солнечные фотоэлементы 29, силовую шину 30, общую информационную шину 31, шину сигналов откликов с фотоприемников 32 (фиг. 1), шину управления перестраиваемыми электрооптическими фильтрами и оптическими затворами 33, высоковольтную шину с положительной полярностью 34, высоковольтную шину с отрицательной полярностью 35, пленочные прозрачные электроды 36 (фиг. 4), прозрачные плоские электромагнитные катушки 37, жесткие прозрачные диэлектрические микроподложки 38, пленочный перестраиваемый электрооптический фильтр 39 (фиг. 8), пленочный оптический затвор 40, планарный фотоприемник 41 (фиг. 1, фиг. 6), эластичный держатель планарного фотоприемника 42, микроконтейнеры 43, позиционную штрихкодовую ленту 44, датчик штрихкода 45 (фиг. 3, фиг. 4), первый 46, второй 47 дисковые солнечные датчики, навигационную звездную камера 48, П-образную штангу 49, первый 50 и второй 51 контроллеры, первый 52 и второй 53 стабилизаторы напряжения, высоковольтный источник питания 54, коллинеарную антенну 55, приемопередатчик 56, микрогранулы термоплавкого клея 57 (фиг. 6, фиг. 7). На фиг. 3, в границах замкнутых пунктирных линий, расположены элементы, конструктивно размещенные в первом 1 и втором 2 цилиндрообразных корпусах. λ1, λ2, λ3, λ4 - выделенные длинны волн электромагнитного излучения оптического диапазона, излучаемые первым 15, вторым 16, третьим 17, четвертым 18 дискообразными сканируемыми лазерными дальномерами, λem - длина волны эмиссии (флуоресценции собранных нанообъектов), λех - длина волны возбуждения (собранных нанообъектов), λ∑ - спектр длин волн солнечного света, 58 - нанообъекты, притянутые к поверхностям жестких прозрачных диэлектрических микроподложек.
Возбуждение исследуемых нанообъектов 58 (для обнаружения у них флуоресценции) происходит с помощью солнечного света, из спектра которого формируются световые импульсы определенной длительности с последовательно перебираемыми по шагам длинами электромагнитных волн в диапазоне от ультрафиолетового (УФ) до инфракрасного (ИК) излучения, до момента возникновения флуоресценции. Для реализации преобразования солнечного света в управляющие световые импульсы, гибкая подложка 28 выполнена светонепроницаемой, с упорядоченно размещенными на ее поверхности оптическими окнами. Оптические окна выполнены в виде оптически прозрачной пленки, повторяющей геометрические размеры поверхности жесткой прозрачной диэлектрической микроподложки 38. Между окнами с солнечной стороны упорядоченно размещены тонкопленочные солнечные элементы 29, постоянно ориентированные на Солнце. С теневой противоположной стороны гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28 по направлению траектории движения БКА находятся микроконтейнеры 43, в которых размещены элементы для создания электрических и электромагнитных полей, притягивающие дрейфующие в гравитационно-сбалансированных зонах нанообъекты 58 и осуществляющие хранение собранных нанообъектов 58.
Для быстрого обнаружения (экспресс-анализа) флуоресценции нанообъектов 58, притянутых к наружной поверхности жесткой прозрачной диэлектрической микроподложки 38, на ее тыльную сторону нанесено несколько функциональных слоев друг на друга в следующей последовательности: пленочный прозрачный электрод 36 (фиг. 8) или прозрачная плоская электромагнитная катушка 37 (фиг. 9), пленочный перестраиваемый электрооптический фильтр 39, пленочный оптический затвор 40. Каждый слой или их сочетание выполняют определенные функции. Жесткая прозрачная диэлектрическая микроподложка 38 служит для накопления нанообъектов 58, которые притягиваются к пленочному прозрачному электроду 36 или прозрачной электромагнитной катушке 37 и осаждаются на жесткой прозрачной диэлектрической подложке 38, расположенной на их пути. Пленочный прозрачный электрод 36 и прозрачная электромагнитная катушка 37 пропускают сформированный и отфильтрованный световой импульс возбуждения и одновременно создают электрическое и электромагнитное поле для притягивания нанообъектов 58. Пленочный перестраиваемый оптический фильтр 39 в зависимости от величины управляющего напряжения пропускает из спектра солнечного света узкий диапазон УФ или ПК длин электромагнитных волн для возбуждения нанообъектов 58, обладающих свойствами флуоресценции в видимом диапазоне. Пленочный оптический затвор 40 производит модуляцию солнечного света, превращая его в короткие световые импульсы возбуждения нанообъектов 58 в интервалах, между которыми (в темноте) происходит измерение времени флуоресценции нанообъектов 58, притянутых на жесткую прозрачную диэлектрическую микроподложку 38. Размер жесткой прозрачной диэлектрической микроподложки 38 адаптирован под тип микроскопа, производящего последующие исследования в земных условиях, что не требует дополнительного перемещения собранных нанообъектов 58 с одной микроподложки на другую и исключает возникновение дефектов, превращающих излучающие наночастицы в безызлучающие, а также исключает искажения топологических портретов размещения одних нанообъектов относительно других, сформированных на микроподложках в космосе.
Флуоресценция - слабое излучение, и для ее фиксации микроконтейнеры 43 и планарные фотоприемники 41 расположены с теневой стороны гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28, которые периодически открываются и закрываются, пропуская световые импульсы возбуждения собранных нанообъетов 58. Фоточувствительная область планарного фотоприемника 41 направлена на центр жесткой прозрачной диэлектрической микроподложки 38 с собранными нанообъектами 58, для фиксирования интенсивности и длительности отклика, в виде флуоресценции, на возбуждающий световой импульс, поступающий через жесткую прозрачную диэлектрическую микроподложку 38. Начало измерения длительности флуоресценции начинается по задним фронтам возбуждающих нанообъекты 58 световым импульсам, период повторения которых должен быть больше максимального времени флуоресценции самого долго излучающего нанообъекта 58. Держатель планарного фотоприемника 42 (фиг. 6, фиг. 7) изготовлен из непрозрачного пружинящего эластичного материала дельтаобразной формы. При развертывании БКА держатель планарного фотоприемника 42 приподнимает планарный фотоприемник 41, находящейся с ее внутренней стороны над жесткой прозрачной диэлектрической микроподложкой 38, для захвата большей площади обзора и создания дополнительной тени. Это позволяет не препятствовать осаждению нанообъектов 58 на жесткую прозрачную диэлектрическую микроподложку 38 и защищает фоточувствительную область планарного фотоприемника 42 от прямого попадания солнечного света при маневрировании БКА. При свертывании держатель 42 переходит в исходное положение и играет дополнительную роль защитной крышки микроконтейнера 43 для предотвращения возможного повреждения прозрачной герметизирующей пленки 27 от острых граней собранных иглообразных нанообъектов 58.
Для исключения попадания Земных наночастиц планарные микроконтейнеры 43 сверху завариваются прозрачной герметизирующей пленкой 27, в исходном положении размещенной со стороны солнечных элементов, и послойно, вместе с гибкой светонепроницаемой диэлектрической ленточной подложкой с оптическими окнами 28 наматываются на второй цилиндрообразный корпус 2. Идентификационный штрихкод, нанесенный на позиционную ленту 44 под каждым вертикальным рядом планарных микроконтейнеров 43, позволяет определить время запайки микроконтейнеров по коду, считываемому датчиком штрихкода 45. Это позволяет маркировать кластеры собранных нанообъетов, например, в зонах либрации L4 и L5 в системе Земля-Луна, для топологического анализа распределения флуоресцирующих нанообъектов в облокоподобных пылевых структурах и оптимально, при поведении сканирования, самокорректировать поисковые траектории БКА.
Гибкая светонепроницаемая диэлектрическая ленточная подложка с оптическими окнами 28 (фиг. 1) армирована диэлектрическими замкнутыми упорядоченными прямоугольными ребрами жесткости в виде бортиков, образующих на поверхности гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28 множество прямоугольных, открытых сверху планарных микроконтейнеров 43 с шагом, равным шагу распределения оптических окон. В каждом микроконтейнере 43, размещенном вдоль краев гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28, размещен пленочный прозрачный электрод 36, на который наложена жесткая прозрачная диэлектрическая микроподложка 38. В зависимости от расположения пленочных прозрачных электродов 36 в верхней или нижней части гибкой диэлектрической ленточной подложки с оптическими окнами 28, они соединены с высоковольтными шинами 34 и 35 с положительной и отрицательной полярностью. При включении высоковольтного источника питания 54 создается электрическое поле, которое притягивает к пленочным прозрачным электродам 36 противоположно заряженные нанообъекты 58, которые осаждаются, не достигнув их, на жестких прозрачных диэлектрических микроподложках 38. Магнитное поле создается с помощью прозрачных плоских электромагнитных катушек 37, соединенных с силовой шиной 30, при протекании тока через которые создается электромагнитное поле, притягивающее нанообъекты 58 с магнитными свойствами в расположенные в среднем ряду микроконтейнеры 43. Микроконтейнеры 43 сортируют нанообъекты по трем классам: два - для сбора отрицательно и положительно заряженных нанообъектов, один - для сбора нанообъектов с магнитными свойствами. Пленочные прозрачные электроды 36 и плоские прозрачные электромагнитные катушки 37 расположены под жесткими прозрачными диэлектрическими микроподложками 38.
Для осуществления изобретения могут быть использованы, например, известные технологии изготовления компонентов. В качестве мультивекторного матричного ракетного двигателя (ММРД) с волнообразной цилиндрической поверхностью может быть использована мультивекторная матричная ракетная двигательная система с цифровым управлением величины и направления тяги, которая состоит из плоской дискообразной с волнообразным внешним контуром монолитной термостойкой диэлектрической подложки с размещенными на ней квадратной матричной реверсивной структурой двигательных ячеек, соединенной с повторяющим ее контур цилиндрообразной полой с волнообразным профилем монолитной термостойкой диэлектрической подложкой с радиально-веерной ориентацией всех продольных осей конусообразных микропор на центры чередующихся сопряженных вогнутых и выпуклых полуокружностей, образующих в совокупности замкнутую волнообразную внешнею поверхность. Все конусообразные микропоры заполнены твердым топливом и ранжированы по объему в пропорциях последовательных степенях числа два (1-2-4-8-16-32), обеспечивающих генерацию множества разнонаправленных векторов тяги с прецизионным цифровым управлением в двоичном коде величиной тяги каждой ячейки [5].
При изготовлении СБ могут быть использованы известные технологии изготовления гибких солнечных тонкопленочных батарей, выполненных на базе гибкой подложки с нанесенными тонкопленочными фотогальваническими элементами, изготовленными, по меньшей мере, из аморфного кремния (a-Si), теллурида кадмия (CdTe), арсенида галлия (GaAs) [6].
Пленочный перестраиваемый электрооптический фильтр может быть реализован согласно описанию известных патентов, например, на базе многослойных перестраиваемых электрооптических фильтров [7, 8, 9]. Например, реализован с использованием тонкой электрооптической пьезокерамической подложки, управляющей оптическим расстоянием между слоями отражающего покрытия [7]. Например, реализован с использованием слоя жидкого кристалла, расположенного между слоями, имеющими структуру мета-поверхности, состоящей из множества поочередно нанесенных друг на друга слоев диэлектрического материала с постепенным увеличением толщины [8]. Например, реализован на базе оптического резонатора, включающего слой из материала с высоким электрооптическим коэффициентом, изменяющий показатель преломления слоя в ответ на напряжение, подаваемое контроллером [9].
Пленочный оптический затвор может быть реализован с помощью известных устройств и способов управления ими, например, на основе полимерной пленки с капсулированными в ней каплями нематического жидкого кристалла (НЖК) [10], [11] или на основе сегнетоэлектрических жидких кристаллов (СЖК) [12]. Принцип работы оптических затворов [10, 11, 12] основан на изменении состояния поляризации композитного слоя, расположенного между входным и выходным поляризаторами, с помощью управляющего электрического поля, создаваемого прозрачными пленочными электродами, соединенными с противоположными поверхностями композитного НЖК слоя или СЖК слоя.
Пленочные прозрачные электроды могут быть, например, сплошными, выполненными по технологии ITO (Indium tin oxide-оксид индия-олова), или многослойными, состоящими из гибкой прозрачной подложки с нанесенным на нее проводящим слоем с упорядоченно расположенными отверстиями, покрытыми прозрачными сферическими микрочастицами [13]. Прозрачная плоская электромагнитная катушка может быть изготовлена из прозрачного электрода, размещенного в виде спирали на прозрачной подложке.
Планарный фотоприемник может быть реализован на базе высокочувствительных лавинных фотодиодов, которые могут быть изготовлены, например, согласно известных патентов [14] или [15]. На этапе отладки могут быть также, например, использованы планарные лавинные фотодиоды S14644-02, изготовляемые Hamamatsu Corp., имеющие диапазон спектрального отклика 400-1000 нм, скорость отклика 1200 МГц и светочувствительную область 0,2 мм [16].
Устройство работает следующим образом: после доставки БКА в точку либрации включаются первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели, осуществляющие выдвижение первой 11, второй 12, третьей 13, четвертой 14 телескопических штанг, отводящие первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразной цилиндрической поверхностью от торцов первого 1 и второго 2 цилиндрообразных корпусов. Первый 23 и второй 24 прижимные линейные шаговые двигатели отводят цилиндрический термоэлемент 25 от цилиндрообразного корпуса 2. Одновременно включаются первый 15, второй 16, третий 17, четвертый 18 дискообразные сканирующие лазерные дальномеры, работающие на выделенных длинах волн λ1, λ2, λ3, λ4 для исключения влияния помех от активных или пассивных источников. После проверки работоспособности первого 15, второго 16, третьего 17, четвертого 18 дискообразных сканирующих лазерных дальномеров включаются первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, которые создают вращение первого 1 и второго 2 цилиндрообразных корпусов, разматывая свернутую в рулон гибкую светонепроницаемую диэлектрическую ленточную подложку с оптическими окнами 28 и расположенную параллельно, на минимальном расстоянии с ее поверхностью прозрачную герметизирующею пленку 27, с одновременным удалением первого 1 цилиндрообразного корпуса от второго 2 цилиндрообразного корпуса, растягивая полотно прозрачной герметизирующей пленки 27 с прилегающей к ней гибкой светонепроницаемой диэлектрической ленточной подложкой с оптическими окнами 28 в противоположные стороны для исключения провисания. После развертывания на требуемую длину (фиг. 11) гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28, с расположенными на ее поверхности тонкопленочными солнечными фотоэлементами 29, БКА переходит в режим ориентации и слежения за Солнцем. Поворот солнечной стороны гибкой диэлектрической ленточной подложки с оптическими окнами 28 в направлении Солнца и одновременное оптимальное ее натяжение осуществляется с помощью первого 3, второго 4, третьего 5, четвертого 6 ММРД с волнообразными цилиндрическими поверхностями, осуществляющие сближение или удаление, или изменение угла наклона, соответственно, первого 1 или второго 2 цилиндрообразных корпусов. С помощью навигационной звездной камеры 48 определяется начальная точка сканирования и корректируется траектория сканирования исследуемой окрестности точки либрации. Согласно коду координат Солнца, полученных от первого 46 и второго 47 дисковых солнечных датчиков, и информации, поступающей с первого 15, третьего 17 и второго 16, четвертого 18 дискообразных сканирующих лазерных дальномеров о расстоянии и углах осей между первым 1 и вторым 2 цилиндрообразными корпусами, осуществляются синхронные угловые повороты первого 1 и второго 2 цилиндрообразных корпусов, без изменения расстояния между ними (фиг. 12). Поворот навигационной звездной камеры 48, закрепленной на П-образной штанге 49 и соединенной с двух концов с первым 19 и вторым 20 плоскими шаговыми двигателями, осуществляется их синхронным поворотом на заданный угол в режиме проведения навигации. На гибкой светонепроницаемой диэлектрической ленточной подложке с оптическими окнами 28, кроме тонкопленочных солнечных фотоэлементов 29 и соединяющих их силовых шин 30, также нанесены коллинеарная антенна 55 и проводной двунаправленный канал связи в виде информационной шины 31 для обмена информацией между первым 50 и вторым 51 контроллерами.
Для втягивания пылеобразных структур, состоящих из нанообъектов 58, на гибкой светонепроницаемой диэлектрической ленточной подложке с оптическими окнами 28 размещены высоковольтные шины 34 и 35, соединенные с пленочными прозрачными электродами 36 (фиг. 4), расположенными под жесткими прозрачными диэлектрическими микроподложками 38, на которых осаждаются противоположно заряженные нанообъекты 58, накапливаемые на дне микроконтейнеров 43. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 29, поступает на прозрачные плоские электромагнитные катушки 37, создающие магнитное поле для втягивания (забора) нанообъектов 58 с магнитными свойствами. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 29, также поступает на входы первого 52 и второго 53 стабилизаторов напряжения, которые выдают стабилизированные напряжения для питания высоковольтного источника питания 54 и приемопередатчика 56, соединенного с коллинеарной антенной 55, а также напряжение для зарядки аккумуляторов первого 50 и второго 51 контроллеров и обеспечения электропитанием всех датчиков и двигателей. Высоковольтное напряжение с источника высоковольтного питания 54 подается на высоковольтные шины с положительной 34 и отрицательной 35 полярностью, расположенные на солнечной стороне гибкой светонепроницаемой диэлектрической ленточной подложке с оптическими окнами 28 для создания притягивающих электрических полей на дне микроконтейнеров 43.
БКА проводит непрерывный мониторинг на наличие у притянутых нанообъектов 58 в микроконтейнеры 43 флуоресцентных свойств, и по результатам экспресс-анализа осуществляет коррекцию поисковой траектории. В качестве источника возбуждения используются длинны волн электромагнитного излучения, выделенные с помощью пленочных перестраиваемых электрооптических фильтров 39 из спектра солнечного света λ∑. Определенная длина волны λех, пройдя через прозрачную жесткую диэлектрическую микроподложку 38, пленочный перестраиваемый электрооптический фильтр, пленочный оптический затвор 40 возбуждают нанообъекты 58, которые преобразуют УФ или ближние ИК длины волн в эмиссионные λem длинны волн видимого диапазона со стоксовым или антистоксовым сдвигом от длины электромагнитной волны возбуждения λех в зависимости от физических и химических свойств материалов, из которых состоят флуоресцирующие нанообъекты 58, пойманные электрическими полями. В периоды между световыми импульсами возбуждения нанообъектов, которые формируются пленочными оптическими затворами, планарные фотоприемники 41 при фиксировании наличия флуоресценции на поверхности жестких прозрачных диэлектрических микроподложек 38 выдают сигналы, несущие информацию об интенсивности и длительности флуоресценции на первый 50 и второй 51 контроллеры, которые уменьшают шаг сканирования траектории поиска для более подробного поиска и запоминает звездные координаты точки. Проведение экспресс-анализа на наличие флуоресценции нанообъектов 58 в космосе позволяет собрать больше флуоресцирующих нанообъектов 58 за меньший интервал времени, сократить время лабораторного анализа на Земле с помощью зондовой и флуоресцентной микроскопии за счет проведения исследований, в первую очередь, тех жестких прозрачных диэлектрических микроподложек 38, где были обнаружены флуоресцирующие нанообъекты 58.
По мере сканирования облачных структур происходит последовательная герметизация микроконтейнеров 43. В исходном состоянии прозрачная герметизирующая пленка 27 расположена со стороны тонкопленочных солнечных элементов 29 и не препятствует прохождению света и втягиванию нанообъектов 58 в микроконтейнеры 43, расположенные на противоположной стороне гибкой светонепроницаемой диэлектрической ленточной подложке с оптическими окнами 28. При сворачивании в рулон после первого оборота (витка) поверхность прозрачной герметизирующей пленки 27 начинает плотно прилегать к поверхности микроконтейнеров 43 с нанесенными микрогранулами термоплавкого клея 57. Герметизация собранных нанообъектов 58 происходит следующим образом. Цилиндрический термоэлемент 25 с помощью первого 23 и второго 24 прижимных линейных шаговых двигателей, работающих синхронно, прижимается параллельно ко второму цилиндрическому корпусу 2, затем вторым 51 контроллером включается режим нагрева цилиндрического термоэлемента 25, который через гибкую светонепроницаемую диэлектрическую ленточную подложку с оптическими окнами 28 и прозрачную герметизирующую пленку 27 (температура плавления которых выше температуры плавления микрогранул термоплавкого клея 57) нагревает микрогранулы термоплавкого клея 57 (фиг. 6, фиг. 7), напыленные на верхние части боковых стенок микроконтейнеров 43. В результате нагрева микрогранулы термоплавкого клея 57 плавятся, приобретая адгезионные свойства, склеивают поверхность микроконтейнеров 43 с поверхностью прозрачной герметизирующей пленки 27. Одновременно третий 21 и четвертый 22 плоские шаговые двигатели поворачивают цилиндрический термоэлемент 25 вокруг оси второго цилиндрообразного корпуса 2 на определенный угол и за определенный временной интервал, определяемые программой второго контроллера 51 для герметизации одной или нескольких линеек микроконтейнеров 43. После завершения цикла сегментной герметизации (сегментное термосклеивание с использованием температуры и давления) третий 21 и четвертой 22 плоские шаговые двигатели переводят цилиндрический термоэлемент 25 в исходное угловое положение, а первый 23 и второй 24 прижимные линейные шаговые двигатели отводят цилиндрический термоэлемент 25 от второго 2 цилиндрообразного корпуса для подмотки гибкой светонепроницаемой диэлектрической ленточной подложки с оптическими окнами 28, соприкосаемой с прозрачной герметизирующей пленкой 27 и начала следующего цикла герметизации микроконтейнеров 43.
На фиг. 10, фиг. 11 - схематично поясняются этапы развертывания БКА. На фиг. 12 - этап сканирования окрестности точки либрации, сбор и герметизация собранных нанообъектов. На фиг. 13 - этап свертывание БКА. Фиг. 10, первый этап - тестирование дальномеров и электронного оборудования. Фиг. 11, второй этап - выдвижение двигателей и ориентация положения БКА на Солнце. Фиг. 12, третий этап - развертывание гибкой подложки с размещенными фотоэлементами и микроконтейнерами для забора внеземных нанообъектов и перемещение БКА по окрестности точки либрации, а также сбор нанообъектов за счет притяжения их к поверхностям прозрачных жестких диэлектрических микроподложек, расположенных в открытых микроконтейнерах 43, и последующая герметизация открытых частей микроконтейнеров 43 с собранными нанообъетами 58 - запайкой прозрачной герметизирующей пленкой 27. Схематически многослойное сканируемое пылеобразное облако изображено на заднем плане. Фиг. 13, четвертый этап - полное свертывание гибкой подложки в рулон и переход системы в энергоэкономичный режим ожидания транспортного космического аппарата для перемещения собранных нанообъектов в исследовательскую лабораторию электронной и зондовой микроскопии, расположенной на Земле или на орбитальной станции в космосе.
Предложенная конструкция бинарного космического аппарата для поиска, сбора и анализа внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, позволяет: развернуть и свернуть поисковое гибкое ленточное полотно большой площади между двумя растягивающими ее маневровыми ММРД с волнообразной цилиндрической поверхностью. Осуществить коррекцию поисковой траектории в зависимости от концентрации флуоресцирующих нанообъектов, обнаруженных при экспресс-анализе исследуемой пылеоблачной структуры с одновременным раздельным сбором нанообъектов с магнитными и немагнитными свойствами, попавшими в зону притяжения электрических и магнитных полей. Реализовать конвейерную герметизацию собранных на жесткие микроподложки нанообъектов, разделенных по классам и размещенных в соответствующих микроконтейнерах, в сочетании со свертыванием в компактный, транспортируемый рулон гибкого ленточного полотна, что ранее невозможно было осуществить с помощью известных конструкций малоразмерных космических аппаратов.
Источники информации
1. Патент на изобретение RU 2691686 С1, 17.06.2019, G01N 1/02, B64G 4/00, Способ забора и доставки на Землю проб космической пыли из окрестностей точек либрации системы Земля-Луна и комплекс средств для его реализации / Цыганков О.С.
2. Патент на изобретение RU 2723899 С1, 18.06.2020, G01Q 60/24, B82Y 35/00, сканирующий зонд атомно-силового микроскопа с отделяемым телеуправляемым нанокомпозитным излучающим элементом, легированным квантовыми точками, апконвертирующими и магнитными наночастицами структуры ядро-оболочка / Линьков В. А., Гусев С.И., Вишняков Н. В., Линьков Ю. В., Линьков П. В.
3. Патент на изобретение RU 2749431 С1, 10.06.2021, B64G 1/22, бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек и апконвертирующих наночастиц в окрестностях точек либрации / Линьков В.А.
4. Патент на изобретение RU 2761486 С1, 08.12.2021, B64G 1/22, бинарный космический аппарат для поиска и сбора внеземных нанообъектов в окресностях точек либрации планет, входящих в солнечную систему / Линьков В.А.
5. Патент на изобретение RU 2707474 С1, 26.11.2019, F02K 9/95, B64G 1/40, мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А. И.
6. Patent US 9758260 В2, Sep.12, 2017, B64G 1/22, B64G 1/10, low volume micro satellite with elexible winded panels expandable after launch.
7. Patent US 9244266 B2, Jan. 26, 2016, G02F 1/03, G02F 1/07, tunable optical filters and method of manufacture thereof.
8. Patent US 10684505 B2, Jun. 16, 2020, G02F 1/1335, G02F 1/21, tunable electro-optic filter.
9. Patent US 11106063 B2, Aug. 31, 2021, G02F 1/03, G02F 1/0327, electrically- tunable optical filters and methods.
10. Патент на полезную модель RU 132574 U1, 20.09.2013, G02F 1/00, жидкокристаллическое полимерное оптическое устройство с регулируемой прозрачностью / Ниезов Ш.Т.
11. Патент на изобретение RU 2736815 С1, 20.11.2020, G02F 1/37, электрооптический жидкокристаллический элемент с низким управляющим напряжением и высоким контрастом / Фрейзер К.А., и др.
12. Патент на изобретение RU 2697888 С1, 21.08.2019, G02F 1/33, Способ управления сегнетоэлектрическим жидкокристаллическим затвором / Компанец И.Н., Ежов В.А.
13. Патент на изобретение RU 2710481 С1, 26.12.2019, H01L 21/00, G02F 1/1343, Прозрачный электрод с асимметричным пропусканием света и способ его изготовления / Симовский К.Р. и др.
14. Патент на изобретение RU 2316848 С1, 20.11.2008, H01L 31/06, микроканалный лавинный фотодиод / Садыгов З.Я.
15. Патент на изобретение RU 2654386 С1, 17.05.2018, H01L 31/107, Способ изготовления планарного лавинного фотодиода / Будтолаев А.К. и др.
16. URL htths://www.hamamatsu.com


Изобретение относится к малоразмерным исследовательским бинарным космическим аппаратам (БКА). БКА содержит два цилиндрообразных корпуса, по торцам которых размещены четыре мультивекторных матричных ракетных двигателя. БКА обеспечивает сканирование космических облачно-пылевых структур с нанообъектами (НАО), развертывание и свертывание гибкой ленточной подложки с размещенными на ней солнечными элементами и микроконтейнерами для сбора НАО посредством электрического и магнитного полей. Траектория поиска НАО корректируется по мере обнаружения флуоресценции у немагнитных НАО с помощью планарных фотоприемников, расположенных над жесткими подложками с собранными НАО, возбуждаемыми солнечным светом, прошедшим через пленочные электроды и катушки, перестраиваемые электрооптические фильтры и пленочные оптические затворы. Микроконтейнеры с собранными НАО запаивают герметизирующими пленками и свертывают в рулон, транспортируемый на Землю. Техническим результатом является возможность коррекции указанной траектории поиска по результатам экспресс-анализа флуоресцентных свойств НАО, собранных как с помощью электрического, так и магнитного полей. 13 ил.
Бинарный космический аппарат для поиска и сбора внеземных флуоресцирующих нанообъектов в окрестностях точек либрации планет, входящих в Солнечную систему, содержащий два цилиндрообразных корпуса, гибкую подложку с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационными, силовыми, высоковольтными шинами, коллинеарной антенной, позиционной штрихкодовой лентой, микроконтейнерами, пленочными электродами, плоскими электромагнитными катушками, жесткими диэлектрическими микроподложками, а также четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре выдвижные телескопические штанги, четыре линейных шаговых двигателя, цилиндрический термоэлемент, герметизирующую пленку, солнечный датчик, датчик штрихкода, два контроллера, два стабилизатора напряжения, высоковольтный источник питания, приемопередатчик, четыре дискообразных сканирующих лазерных дальномера, навигационную звездную камеру, четыре плоских шаговых двигателя, два прижимных линейных шаговых двигателя, П-образную штангу, выдвижную П-образную штангу, микрогранулы термоплавкого клея, нанесенные на края микроконтейнеров, отличающийся тем, что содержит гибкую диэлектрическую ленточную с оптическими окнами подложку с нанесенными с теневой стороны шинами сигналов откликов с планарных фотоприемников и шиной управления перестраиваемыми электрооптическими фильтрами и оптическими затворами, пленочные электроды, плоские электромагнитные катушки и жесткие диэлектрические микроподложки, выполненные прозрачными, пленочные перестраиваемые электрооптические фильтры, пленочные оптические затворы, планарные фотоприемники, эластичные держатели планарных фотоприемников, первый и второй дисковые солнечные датчики, расположенные плоскостями перпендикулярно друг другу и закрепленные на П-образной штанге, герметизирующую пленку, выполненную прозрачной, гибкую диэлектрическую ленточную подложку, выполненную светонепроницаемой с чередующимися между тонкопленочными солнечными элементами оптическими окнами с формой, повторяющей форму жестких прозрачных диэлектрических микроподложек, с шагом чередования, равным шагу размещенных микроконтейнеров, с закрепленными эластичными держателями фотоприемников, с внутренней стороны которых закреплены планарные фотоприемники, соединенные с шиной сигналов откликов с планарных фотоприемников, фоточувствительные области которых направлены на расположенные на дне микроконтейнеров исследуемые нанообъекты, притянутые электрическим или электромагнитным полем на внешние поверхности жестких прозрачных диэлектрических микроподложек, лежащих, в зависимости от вида притягивающего поля, на пленочных прозрачных электродах или на прозрачных плоских электромагнитных катушках, лежащих на последовательно расположенных пленочных перестраиваемых электрооптических фильтрах и пленочных оптических затворах, входы которых соединены через шину управления перестраиваемыми электрооптическими фильтрами и оптическими затворами с управляющими выходами первого и второго контроллеров, измерительные входы которых соединены с шиной сигналов откликов с планарных фотоприемников.
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ПОИСКА И СБОРА ВНЕЗЕМНЫХ НАНООБЪЕКТОВ В ОКРЕСТНОСТЯХ ТОЧЕК ЛИБРАЦИИ ПЛАНЕТ, ВХОДЯЩИХ В СОЛНЕЧНУЮ СИСТЕМУ | 2021 |
|
RU2761486C1 |
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ПОИСКА И СБОРА ВНЕЗЕМНЫХ ОБЪЕКТОВ СО СВОЙСТВАМИ КВАНТОВЫХ ТОЧЕК В ОКРЕСТНОСТЯХ ТОЧЕК ЛИБРАЦИИ | 2020 |
|
RU2744277C1 |
| СПОСОБ ОБЕСЦВЕЧИВАНИЯ САХАРНЫХ РАСТВОРОВ | 0 |
|
SU206426A1 |
| МУЛЬТИВЕКТОРНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ И НАПРАВЛЕНИЕМ ТЯГИ ДВИГАТЕЛЬНЫХ ЯЧЕЕК ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2707474C1 |
| US 9758260 B2, 12.09.2017 | |||
| US 10995879 B2, 04.05.2021. | |||

