Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений
Изобретение относится к гироскопам и измерительной технике и может быть использовано для определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
Для расчета устойчивости зеемановского кольцевого лазера необходимо знать, как изменяется его периметр при воздействии линейных ускорений, который определяется коэффициентом пропорциональности ΔL/g, где ΔL - изменение периметра кольцевого лазера при изменении линейного ускорения на 1 g или на длину волны ΔL/λ.
Этот коэффициент можно измерить с использованием центрифуги, определяя ускорение и напряжение при перестройке кольцевого лазера. Однако, такой способ требует использования центрифуги, что усложняет процесс измерений и требует относительно больших временных затрат.
Известен способ для измерения потерь в кольцевом оптическом резонаторе, который реализован в устройстве [RU 152947, U1, G01M 11/00, 25.06.2015], содержащем зондирующий лазер с блоком управления зондирующего лазера, блок управления пьезокерамическим двигателем, вычислительный блок, последовательно соединенные первый фотоприемник, вход которого соединен с первым выходом измеряемого оптического резонатора, и первый аналого-цифровой преобразователь, выход которого соединен с первым входом вычислительного блока, последовательно соединенные второй фотоприемник и второй аналого-цифровой преобразователь, выход которого соединен со вторым входом вычислительного блока, генератор тока, выход которого соединен с катушками магнитного поля зондирующего лазера, последовательно соединенные третий фотоприемник, вход которого соединен с выходом зондирующего лазера через оптический смеситель, и цифровой частотомер, выход которого соединен с третьим входом вычислительного блока, а также блок ввода оптических сигналов в измеряемый оптический резонатор, вход которого соединен с выходом зондирующего лазера, а выход соединен с входом измеряемого оптического резонатора, при этом выход блока управления пьезокерамическим двигателем соединен с управляющим входом пьезокерамического двигателя, установленного на зеркале измеряемого оптического резонатора, а вычислительный блок определяет потери 5 в измеряемом оптическом резонаторе по соотношению
где с - скорость света, L - периметр резонатора, Δt - ширина резонансной кривой на полувысоте, τ - расстояние между резонансными кривыми, νб - частота биений встречных волн в зондирующем лазере.
Недостатком этого технического решения является относительно узкие функциональные возможности, не позволяющие, в частности, определить коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
Известно также техническое решение, относящееся к способу определения угловых скоростей и перемещений [SU 1841143, A1, G01S 17/58, 10.06.2016], заключающемся в том, что изменяют периметр резонатора и соотношения добротностей кольцевого оптического квантового генератора на величину, кратную половине излучаемой длины волны, с последующим определением разностных частот от невзаимного элемента и углового вращения для каждой из ортогонально поляризованных волн.
Недостатком этого технического решения также является относительно узкие функциональные возможности, не позволяющие, в частности, определить коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
Наиболее близким по технической сущности к предложенному является способ измерения [RU 2525648, C1, G01C 19/64, 20.08.2014], включающий настройку и работу лазерного гироскопа в двухчастотном режиме на одной из ортогонально поляризованных мод кольцевого лазера лазерного гироскопа, создание частотной подставки с помощью наложения магнитного поля на активный элемент кольцевого лазера с эллиптической или круговой поляризацией излучения в активном элементе кольцевого лазера, выделение информации об угловых перемещениях из информации, поступающей от кольцевого лазера, периодическую поочередную работу кольцевого лазера в двухчастотном режиме на модах с ортогональными поляризациями кольцевого лазера, переключение кольцевого лазера на моду с ортогональной поляризацией после каждого очередного момента завершения работы кольцевого лазера на любой из этих мод, при этом, предварительно или при измерении угловых перемещений по амплитуде сигнала вращения или по величине частотной подставки, или по величине сигнала расстройки периметра, или по напряжению на пьезоголовке определяют для мод с ортогональными поляризациями промежутки времени во время переключений поляризации, в которых будут использованы результаты измерений угловых перемещений с учетом ошибок, обусловленных изменением частоты подставки из-за расстройки периметра кольцевого лазера, вызванной переключением поляризации, предварительно измеряют и/или вычисляют для мод с ортогональными поляризациями зависимость частоты подставки от величины изменения напряжения на пьезоголовке, обусловленной расстройкой периметра резонатора кольцевого лазера, относительно напряжения соответствующего настройке системы регулировки периметра на центр соответствующей моды, при каждом очередном переключении во время измерений угловых перемещений в выбранных промежутках времени этого переключения измеряют зависимость величины изменения напряжения на пьезоголовке от времени относительно значения напряжения для соответствующей моды до начала данного переключения и для моды с ортогональной поляризацией относительно значения напряжения после этого переключения, для каждого выбранного промежутка времени при каждом данном переключении при измерении угловых перемещений рассчитывают и учитывают ошибки, обусловленные изменением величины частоты подставки из-за расстройки периметра резонатора кольцевого лазера при переключении поляризации, используя предварительно измеренную и/или вычисленную зависимость частоты подставки от величины изменения напряжения на пьезоголовке, обусловленной расстройкой периметра резонатора кольцевого лазера, относительно напряжения соответствующего настройке системы регулировки периметра на центр соответствующей моды и измеренную для этой же моды при данном переключении зависимость величины изменения напряжения на пьезоголовке от времени в этом же выбранном промежутке времени данного переключения относительно соответствующего значения напряжения для этой же моды до или после данного переключения.
Недостатком наиболее близкого технического решения является относительно узкая область применения, что не позволяет, в частности, определить очень важный для практики коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
Задачей изобретения является разработка способа определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений и расширение на этой основе арсенала технических средств, которые могут быть использованы для этих целей.
Требуемый технический результат заключается в расширении области применения известных способов с целью обеспечения возможности определения важного для практики коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
Поставленная задача решается, а требуемый технический результат достигается тем, что изменяют сигнал расстройки периметра путем изменения напряжения UA на зеркалах с пьезоэлектрическими двигателями и измеряют разность напряжений Uλ/2 между минимумами зависимости частоты выходных сигналов вращения sin и cos от напряжения на пьезокерамике, которая соответствует изменению периметра на λ/2, фиксируя, при этом, частоту fA выходных сигналов sin и cos, затем при расстройке периметра на ΔλB≈+0,05 измеряют частоту fB выходных сигналов sin и cos и напряжение на зеркалах с пьезоэлектрическими двигателями UB, после чего измеряют частоту fC выходных сигналов sin и cos и напряжение на зеркалах с пьезоэлектрическими двигателями UC при расстройке периметра на - ΔλB, устанавливают кольцевой лазер на вибрационную установку и при амплитуде виброускорения Ауск, плавно меняют фазу ϕ0 генератора и определяют максимум вибрационного дрейфа ΔΩBmax при частоте вибрации ν=1/2T и окончательно определяют коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений из соотношения
где 
На чертеже представлены:
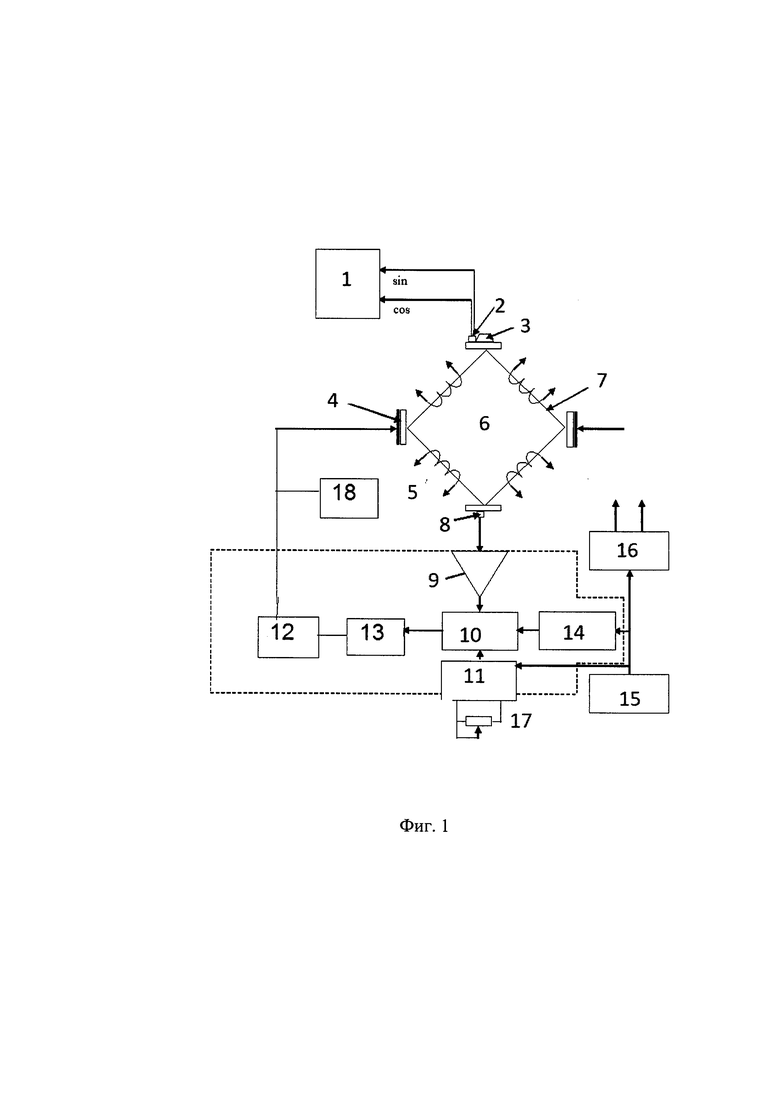
на фиг. 1 - схема установки для реализации предложенного способа;
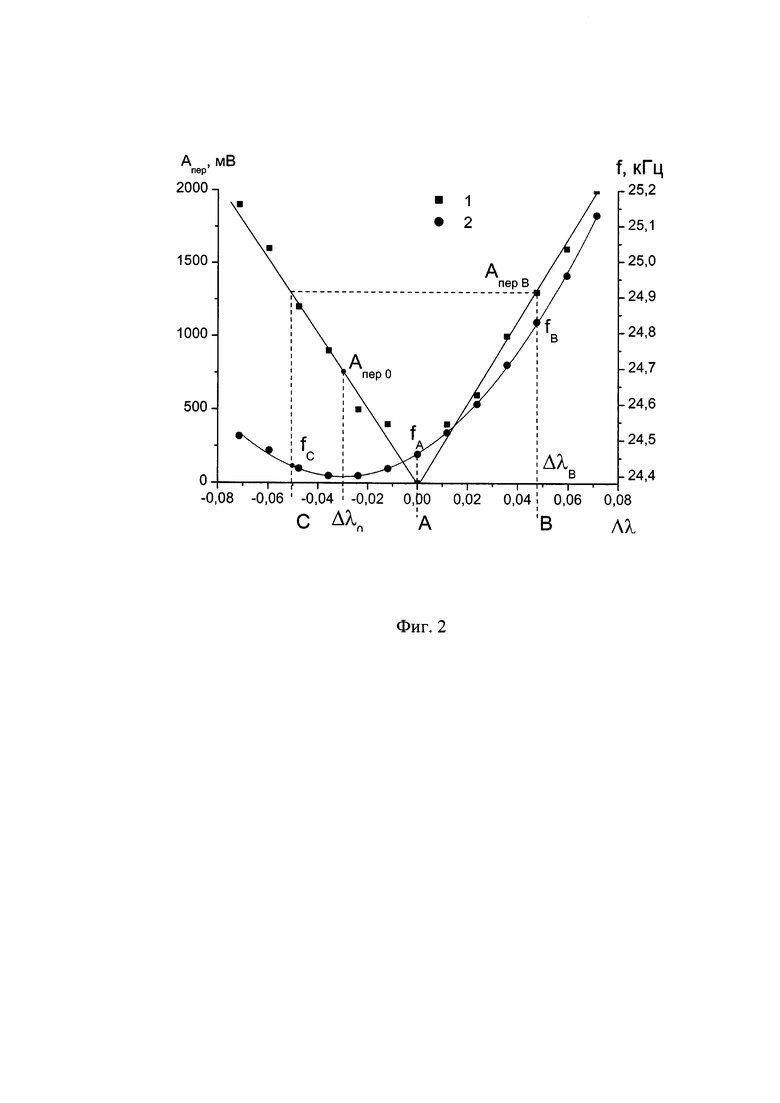
на фиг. 2 - зависимость амплитуды сигнала на фотоприемнике СРП Апер (кривая 1) и частотной подставки f (кривая 2) от относительной расстройки периметра резонатора ЗЛГ Δλп двухизотопного ЗЛГ К-5 для двух амплитуд токов частотной подставки (линии - расчеты по формуле (1), fA, fB, fC - частоты подставки при расстройке периметра на ΔλП=0 (точка А), ΔλП=+ΔλB (точка В), ΔλП=-ΔλB (точка С), АперВ=АперС).
На фиг. 1 обозначены: 1 - частотомер, 2 - двухплощадочный фотоприемник, 3 - смеситель, 4 - зеркала с пьезоэлектрическими двигателями, 5 - катушки тока блока частотной подставки, 6 - зеемановский кольцевой лазер, 7 - газоразрядные промежутки, 8 - приемник сигнала расстройки периметра, 9 - усилитель переменного напряжения, 10 - синхронный детектор, 11 - усилитель сигнала расстройки, 12 - усилитель, 13 - интегратор, 14 - инвертор, 15 - генератор синхроимпульсов, 16 - генератор тока блока частотной подставки, 17 - регулятор коэффициента усиления сигнала расстройки периметра, 18 - вольтметр, 19 - формирователь сигнала расстройки периметра.
Предложенный способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений реализуется следующим образом.
Способ основан на использовании вибрационной установки для предварительного определения вибрационного дрейфа ΔΩB [М.Е. Грушин, Ю.Ю. Колбас Вибрационная ошибка лазерных гироскопов. Вестник МГТУ им. Баумана, сер. Приборостроение, №4, 2017 с. 27-42], определяемого соотношением:

где Т - период коммутации подставки, ν - частота вибрации, ΔL - амплитуда вибрационного изменения периметра резонатора, fo - амплитуда частотной подставки при ΔL=0, χ - константа, зависящая от амплитуды частотной подставки, усиления активной среды и уровня потерь в резонаторе, ϕ0 - разность фаз между механической вибрацией и знакопеременным током блока частотной подставки (БЧП).
Первое слагаемое в (1) имеет максимальные абсолютные значения на частотах, полукратных частоте коммутации тока БЧП, т.е. 1/2Т. При этом максимумы вибрационного дрейфа равны:

Изменяя сигнал расстройки периметра, можно определить зависимость частоты выходных сигналов вращения sin и cos f от напряжения на пьезокерамике зеркал с пьезоэлектрическими двигателями.
Разность напряжений между минимумами зависимости частоты выходных сигналов вращения sin и cos (для sin и cos частоты одинаковы) от напряжения на пьезокерамике соответствует изменению периметра на λ/2. Зная величину Uλ/2 и используя схему (фиг. 1), может быть определен коэффициент χ⋅f0.
Для этого после включения СРП по сигналу от фотоприемника 8 СРП настраивается в точку А (фиг. 2). При этом переменный сигнал от фотоприемника СРП равен 0. Измеряется частота fA выходных сигналов sin и cos и с измеряется напряжение на зеркалах 4 с пьезоэлектрическими двигателями UA.
Затем процессором выставляется сигнал, равный сигналу от фотоприемника 8 СРП при расстройке периметра на ΔλB≈+0,05 (точка В на фиг. 2) амплитудой АперВ. Измеряется частота fB выходных сигналов sin и cos и напряжение на зеркалах 4 с пьезоэлектрическими двигателями UB.
Затем выставляется сигнал, равный сигналу от фотоприемника 8 СРП амплитудой АперВ с обратной фазой при расстройке периметра близкой к - ΔλB (точка С на фиг. 2) и измеряется частота fC выходных сигналов sin и cos и напряжение на зеркалах 4 с пьезоэлектрическими двигателями UC.
Тогда получим:

где Uλ - изменение напряжения на зеркалах с пьезоэлектрическими двигателями, соответствующее изменение длины периметра ЗЛГ на одну длину волны генерируемого света.

Затем кольцевой лазер устанавливают на вибрационную установку и установить амплитуду виброускорения А. Плавно меняя фазу генератора ϕ0, измеряют максимум вибрационного дрейфа ΔΩBmax при частоте вибрации ν=1/2T.
Тогда 
Таким образом, в предложенном техническом решении достигается требуемый технический результат, заключающийся в расширении области применения способа и обеспечении возможности определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2736737C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2525648C1 |
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2724242C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2531028C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2530481C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
Изобретение относится к гироскопам и измерительной технике и может быть использовано для определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений. Технический результат, заключается в расширении области применения способа и обеспечении возможности определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений. В заявленном способе изменяют сигнал расстройки периметра путем изменения напряжений на зеркалах с пьезоэлектрическими двигателями, измеряют разность напряжений Uλ/2 между минимумами зависимости частоты выходных сигналов вращения sin и cos от напряжения на пьезокерамике, измеряют частоты выходных сигналов sin и cos, устанавливают кольцевой лазер на вибрационную установку при амплитуде виброускорения Ауск, плавно меняют фазу ϕ0 генератора и определяют максимум вибрационного дрейфа ΔΩBmax при частоте вибрации ν=1/2T и окончательно определяют коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений 2 ил.
Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений, согласно которому изменяют сигнал расстройки периметра путем изменения напряжения UA на зеркалах с пьезоэлектрическими двигателями и измеряют разность напряжений Uλ/2 между минимумами зависимости частоты выходных сигналов вращения sin и cos от напряжения на пьезокерамике, которая соответствует изменению периметра на λ/2, фиксируя при этом частоту fA выходных сигналов sin и cos, затем при расстройке периметра на ΔλB≈+0,05 измеряют частоту fB выходных сигналов sin и cos и напряжение на зеркалах с пьезоэлектрическими двигателями UB, после чего измеряют частоту fC выходных сигналов sin и cos и напряжение на зеркалах с пьезоэлектрическими двигателями UC при расстройке периметра на - ΔλB, устанавливают кольцевой лазер на вибрационную установку при амплитуде виброускорения Ауск, плавно меняют фазу ϕ0 генератора и определяют максимум вибрационного дрейфа ΔΩBmax при частоте вибрации ν=1/2T и окончательно определяют коэффициент чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений из соотношения
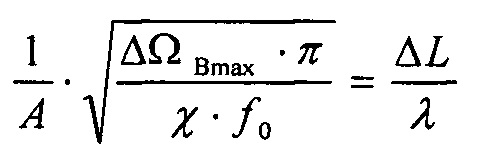 ,
,
где 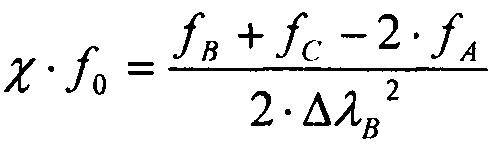 , а ΔL - изменение периметра кольцевого лазера при изменении линейного ускорения на 1 g или на длину волны ΔL/λ.
, а ΔL - изменение периметра кольцевого лазера при изменении линейного ускорения на 1 g или на длину волны ΔL/λ.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2525648C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИИ ПУЧКОВ РЕНТГЕНОВСКИХ КВАНТОВ | 0 |
|
SU193114A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ПОЛЕЗНОГО СИГНАЛА КОЛЬЦЕВОГО ЛАЗЕРА | 2014 |
|
RU2581396C1 |
| WO 2017149526 A2, 08.09.2017 | |||
| KR 1020090091295 A, 27.08.2009. | |||

