Изобретение относится к области высокоточной лазерной гироскопии, а именно к системам регулирования периметра резонатора четырехчастотного лазерного гироскопа.
Известно устройство [2], изменяющие длину периметра резонатора четырехчастотного лазерного гироскопа таким образом, чтобы обеспечить фиксированное расположение мод относительно кривой усиления по равенству амплитуд сигналов вращения и частот биений встречных волн. Устройство включает в себя оптический смеситель с фотоприемниками для регистрации выходного излучения кольцевого лазера, блок счетчиков импульсов сигналов частоты биений встречных волн продольных мод, процессор, генератор синхроимпульсов и цифро-аналоговый преобразователь.
Недостатком устройства [2] является необходимость использования оптического смесителя, поляризационные свойства которого могут приводить к проникновению сигнала из одного канала в другой и снижению точности стабилизации периметра.
Наиболее близкой по технической сути к предлагаемому изобретению является система управления длиной резонатора мультичастотного лазерного гироскопа [1], включающая в себя фотодетектор, регистрирующий сигнал биений мод левой и правой круговых поляризаций, выходящих из кольцевого лазера в одном направлении, высокочастотный усилитель, амплитудный демодулятор, детектирующий сигнал амплитудной модуляции, связанный с модуляцией периметра кольцевого лазера, приводящей к изменению амплитуды сигнала биений ввиду изменения усиления при перестройке частоты. В устройстве [1] осуществляется настройка периметра по амплитуде сигнала биений мод ортогональных круговых поляризаций, генерируемых в одном направлении, при выполнении условия равенства по модулю и противоположности по знаку производных амплитуды при перестройке периметра, что соответствует минимуму амплитуды модуляции сигнала биений.
В сравнении с [2] устройство [1] обладает рядом преимуществ, таких как использование только одного фотодетектора для регистрации сигнала рассогласования периметра, отсутствие необходимости в использовании оптического смесителя, возможность стабилизации периметра не только в лазерных гироскопах, но и в отдельном кольцевом лазере. Кроме того, в сравнении с [1] устройство [2] дает меньший отклик изменения длины периметра и частоты генерации на внешние воздействия, изменяющие резонатор.
Недостатком наиболее близкого технического решения является в первую очередь то, что амплитудная характеристика является менее стабильной и более чувствительной с точки зрения отклика генерации на внешние воздействия по сравнению с частотной характеристикой. Во-вторых, для измерения сигналов используется не весь контур усиления, а только область, в которой происходит перестройка периметра. Это ограничивает предельную точность стабилизации периметра гироскопа, кроме того, измерение амплитуды и соответствующая аналоговая обработка данных требует построения более сложной системы по сравнению с цифровыми методами обработки сигнала в виде частоты.
Задачей, которая решается в предложенном изобретении, является расширение арсенала технических средств регулировки периметра резонатора четырехчастотного лазерного гироскопа без необходимости использования оптического смесителя.
Технический результат предлагаемого изобретения заключается в предложении нового по сравнению с ранее известными способа управления длиной резонатора в четырехчастотном лазерном гироскопе с знакопеременной или постоянной магнитооптической подставкой зеемановского или фарадеевского типа либо без подставки, отличающегося использованием в качестве информационного сигнала частоты сигнала биений волн ортогональной поляризации одного направления распространения.
Результат достигается регистрацией сигнала биений сонаправленных волн ортогональной поляризации на выходе кольцевого лазера четырехчастотного лазерного гироскопа и перестройкой его периметра с помощью пьезодвигателей, установленных не менее чем на одном зеркале таким образом, чтобы частота биений была максимальной. Высокая точность поддержания периметра предложенным способом обеспечивается благодаря высокой крутизне изменения разности частот волн ортогональной поляризации, обусловленной нелинейностью аномальной дисперсионной зависимости активной среды.
На чертеже представлены:
фиг. 1 - частотный спектр четырехчастотного лазерного гироскопа;
фиг. 2 - структурная схема, иллюстрирующая реализацию предложенного изобретения;
фиг. 3 - схема, иллюстрирующая обработку данных в предложенном способе;
фиг. 4 - график зависимости разностных частот от изменения частоты при смещении зеркал пьезодвигателями. По горизонтальной оси отложено смещение частоты Δƒ каждой из мод ортогональной поляризации относительно центра контура усиления «холодного» (без генерации, т.е. без учета дисперсии) резонатора в единицах частоты Δƒ=k×ΔU (ΔU - напряжение, подаваемое на пьезодвигатели без учета нелинейности смещения). ƒ1 - частота левой круговой поляризации, ƒ2 - частота правой круговой поляризации, ƒ0 - константа, соответствующая частоте центра контура усиления, ƒ=ƒ2-ƒ1 - частота биений, на максимум которой производится настройка периметра, ƒ00 - константа вблизи ~607 МГц либо ~463 МГц.
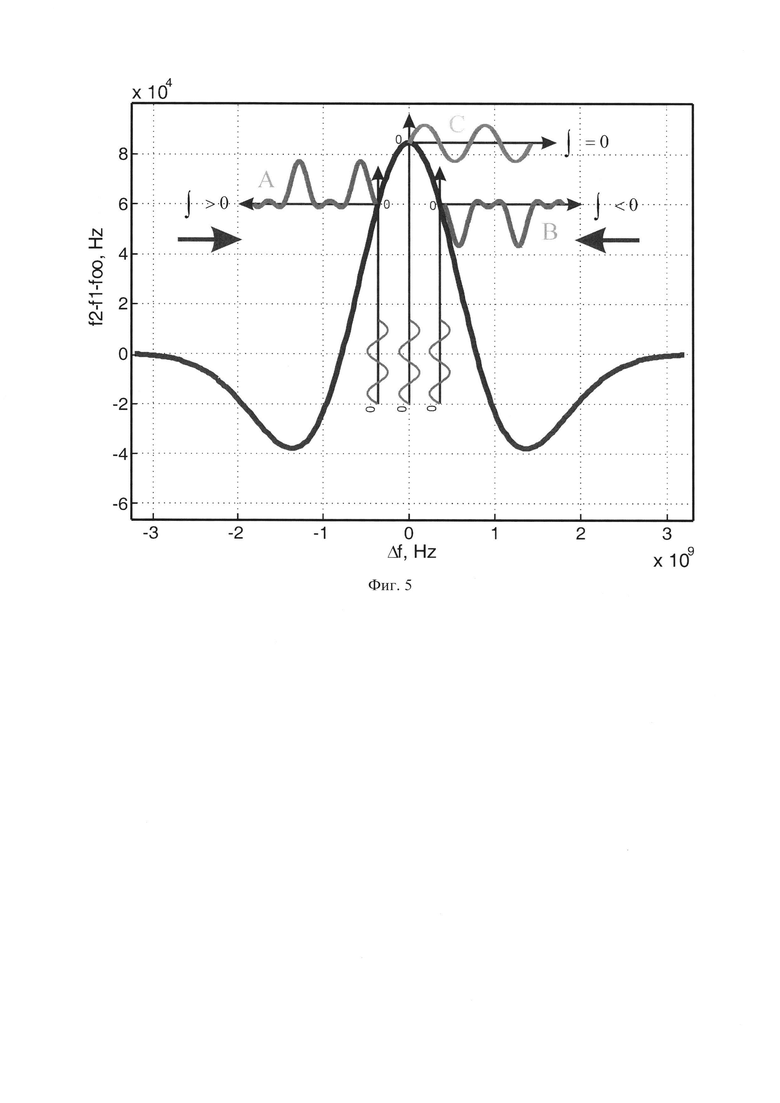
фиг. 5 - Сигналы на выходе умножителя синхронного детектора возникающие при модуляции периметра путем смещения зеркал пьезодвигателями в зависимости от отклонения частоты резонатора (Δƒ - смещение частоты резонатора от центра контура усиления, связанное с его длиной и без учета дисперсии). При смещении частоты от максимума кривой на выходе интегратора появляется возвращающий сигнал, пропорциональный смещению.
В качестве примера четырехчастотного лазерного гироскопа рассматривается Не-Ne лазер с неплоским резонатором в форме правильного тетраэдра с длиной периметра 28 см. Такой резонатор имеет неэквидистантный спектр частот для собственных мод левой и правой круговых поляризаций, что проиллюстрировано на фиг. 1. В изобретении критерием выбора рабочей точки для стабилизации периметра является максимум частоты биений мод ортогональных поляризаций, т.е. для рассматриваемого гироскопа биение на частоте ~463 МГц либо ~607 МГц.
Предложенное изобретение может быть реализовано с помощью системы управления длиной резонатора четырехчастотного лазерного гироскопа 1 (фиг. 2) включающей в себя скоростной фотодиод 2 для регистрации управляющего высокочастотного сигнала биений, трансимпедансный усилитель для фотодиода, высокочастотный усилитель 3, полосовой фильтр 4, ограничивающий полосу частот в области вблизи ~607 МГц либо ~463 МГц, преобразователь частоты 5 с использованием гетеродинирования посредством ВЧ генератора 6, низкочастотный фильтр 7 (~50 кГц) изменения частоты сигнала биений, связанного с перестройкой периметра. Полученный после фильтрации синусоидальный сигнал с помощью компаратора 8 преобразуется в последовательность импульсов, поступающих в счетные регистры и цифровую систему обработки данных на основе ПЛИС 9. Цифровая система обработки данных 9, создавая периодические колебания длины периметра подачей переменной составляющей напряжения на пьезодвигатели, определяет напряжение, соответствующее максимуму частоты и настраивает периметр на эту рабочую точку, формируя управляющее напряжение, подаваемое через ЦАП 10 на высоковольтный усилитель 11.
Предлагаемый способ управления периметром резонатора четырехчастотного лазерного гироскопа осуществляется следующим образом. Аналогично устройству [1], фотодетектор, на который направлен пучок излучения левой и правой круговой поляризации с частотами ωIC, ωRC, генерируемыми в одном направлении обхода резонатора, будет детектировать сигнал Sc:

Поскольку фотоприемник не способен регистрировать сигналы на частоте излучения, из сигналов суммарной и разностной компонент регистрируется только разностная:

После детектирования сигнала Scd биений мод ортогональной поляризации одного направления распространения частота сигнала смещается в низкочастотную область с помощью гетеродина и превращается в последовательность импульсов, используя компаратор. Полученный сигнал в виде частоты импульсов поступает в блок обработки данных (фиг. 3) для выделения сигнала, обеспечивающего управление пьезодвигателями.
На пьезодвигатели, управляющие длиной периметра, подается как постоянное напряжение, определяющее среднюю частоту мод, так и переменная составляющая, приводящая к периодическому изменению частоты. В этом случае моды будут иметь частоты:

где Afm - глубина модуляции частоты за счет изменения периметра, Afm<<1, ωm - частота модуляции периметра, ƒ01, ƒ02 - средняя частота моды.
Разложим функцию зависимости частоты генерации, учитывающую дисперсионные свойства, от частоты резонатора без учета его дисперсионных свойств:

где L - длина резонатора, λ - длина волны излучения,  - изменение показателя преломления, обусловленное аномальной дисперсией активной среды,
- изменение показателя преломления, обусловленное аномальной дисперсией активной среды,  - константа рабочей пары мод.
- константа рабочей пары мод.
Обозначив  , получаем:
, получаем:

Представим частоты мод ортогональных поляризаций как:

где нормированные на спектральную ширину кривой усиления ΔF величины, ξ1, ξ2≤1, а ƒ0 - это частота центра контура усиления. В этом случае разница частот мод ортогональной поляризации (частота сигнала биений) с учетом дисперсионных свойств будет следующей:

Для настройки на максимум частоты сигнала биений волн ортогональной поляризации одного направления существование максимума в основном определяется членом третьего порядка в разложении (6). Меньшие порядки в (6), после раскрытия скобок, дают константу и линейную зависимость, а старшие порядки будут давать существенно меньший вклад. Линейная зависимость и константы приводят к смещению частоты определяемой по максимуму (фиг. 4) и могут быть преобразованы путем замены переменных к стандартному виду для квадратичной функции f(x)=y0+(x-x0)2. Поэтому рассмотрим следующее выражение - кубический член разложения в (6), как наиболее существенный для формирования максимума частоты биений:

Подставим выражения для нормированных частот через их первоначальные частоты (5):

Представим, в первом приближении, что частоты ортогональных мод изменяются при перемещении зеркал для без дисперсионного резонатора следующим образом:

где интервал по частоте между ортогональными модами  зависит от изменения периметра существенно меньше, чем сама частота моды ввиду большой величины m и может быть принят за константу. Здесь Σϕi - это суммарный поворот пучка в поперечном сечении за обход резонатора. В этом случае получаем:
зависит от изменения периметра существенно меньше, чем сама частота моды ввиду большой величины m и может быть принят за константу. Здесь Σϕi - это суммарный поворот пучка в поперечном сечении за обход резонатора. В этом случае получаем:

После преобразования с учетом (10):

В полученном выражении (12) первый член в квадратных скобках определяет квадратичную зависимость изменения разности частот (частоты сигнала биений волн одного направления и ортогональной поляризации) от частоты моды (9), зависящей от перестройки периметра ΔL, с максимумом, определяющим частоту стабилизации периметра резонатора. Второй член в квадратных скобках дает линейную зависимость, а следующие члены представляют собой константы. Линейная зависимость и константа должны быть просуммированы с членами в (6), и выражение приведено к стандартному виду квадратичной функции:

где ƒx, ƒy - константы получаемые из (12).
Таким образом, в принятом приближении получаем квадратичную зависимость изменения частоты биений волн ортогональной поляризации одного направления от перестройки частоты обусловленной перестройкой периметра:
В случае, когда на пьезодвигатели кроме постоянного напряжения, определяющего среднюю частоту генерации моды, подается еще и небольшая переменная составляющая, разность частот мод ортогональной поляризации одного направления будет зависеть от этих сигналов следующим образом:

Получаем, что разность частот будет промодулирована с частотой модуляции ωm, глубиной модуляции Afm и будет зависеть от смещения частоты ƒ01-ƒx, определяющего фиксированное расположение мод ортогональной поляризации относительно контура усиления. Критерием настройки является ƒ01-ƒx=0.
Для выделения сигнала расстройки ƒ01-ƒx может быть использован синхронный детектор (в цифровом виде). Пример реализации предложен на фиг. 3. После умножителя в синхронном детекторе 12 получается сигнал, определяемый выражением:

где Asm - амплитуда сигнала синхронизации, а ϕ1 - его фаза, поступающие от генератора 13, модулирующего сигнал управления периметром.
После интегратора 14 останется только слагаемое, зависящее от разности фаз промодулированного сигнала биений и опорного сигнала, а также знака и величины разности их частот ƒ01-ƒx являющихся критерием настройки:

Таким образом, на выходе интегратора синхронного детектора будет накапливаться сигнал (17), дающий после высоковольтного усилителя такое напряжение, подаваемое на пьезодвигатели, чтобы выполнялось условие ƒ01-ƒх=0. То есть частота первой моды будет соответствовать частоте, когда ортогональные моды настроены по частоте так, что их разность попадает в максимум сигнала биений (фиг. 4), а сами они расположены фиксировано относительно контура усиления.

Величина γAfmAsm(ƒx-ƒ01)ƒ01cos(ϕ0-ϕ1)dt представляет собой приращение изменения частоты за интервал измерения, которое будет меньше нуля, если частота моды ƒ01 будет меньше соответствующей максимуму разности частот (фиг. 4) частоте для первой моды ƒx. Приращение будет больше нуля, если ƒ01-ƒх>0 и в точке стабилизации ƒ01-ƒх-=0 (фиг. 5). Интегрирование приращения накапливает сигнал, который через усилитель подается на пьезодвигатели для смещения таким образом, чтобы ƒ01-ƒx=0 (фиг. 5).
Поскольку изменение частоты сигнала биений ортогональных мод при перестройке периметра предложенным способом существенно больше изменения частоты зеемановской подставки, стабильность поддержания периметра резонатора будет существенно выше, чем в методах, основывающихся на равенстве зеемановских подставок. Необходимо отметить, что магнитное поле будет приводить к изменению зеемановского вклада в частоты биений мод ортогональной поляризации, но оптимальная настройка периметра будет соответствовать максимуму относительно его отстройки. Вклад влияния магнитного поля в сигналы биений ортогональных поляризаций для встречных волн имеет разный знак. Поэтому в предложенном способе можно использовать дополнительный фотоприемник для регистрации сигнала биений во встречной волне. Находя сумму частот биений от волн обоих направления распространения и настраивая ее на максимум можно получить сигнал для управления периметром, не зависящий от магнитного поля.
Источники информации:
1. Cavity length control apparatus for a multi-oscillator, US4963026.
2. Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа, RU2744420.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДАВЛЕНИЯ ВЛИЯНИЯ МАГНИТНОГО ПОЛЯ НА ДРЕЙФ НУЛЯ В ЗЕЕМАНОВСКИХ ЧЕТЫРЕХЧАСТОТНЫХ И КВАЗИЧЕТЫРЕХЧАСТОТНЫХ ЛАЗЕРНЫХ ГИРОСКОПАХ | 2020 |
|
RU2750425C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| ОПТИЧЕСКИЙ СМЕСИТЕЛЬ ИЗЛУЧЕНИЯ ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА ЗЕЕМАНОВСКОГО ТИПА | 2019 |
|
RU2709428C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2009 |
|
RU2408844C1 |
| Способ и устройство для выделения информации о вращении в четырехчастотном зеемановском лазерном гироскопе | 2023 |
|
RU2810720C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2531028C1 |


Изобретение относится к области высокоточной лазерной гироскопии, а именно к системам регулирования периметра резонатора четырехчастотного лазерного гироскопа. Способ управления длиной резонатора в четырехчастотных лазерных гироскопах заключается в том, что осуществляют детектирование сигнала биений, направляя на фотодетектор пучок излучения левой и правой круговой поляризации с частотами, генерируемыми в одном направлении обхода резонатора. После детектирования частота сигнала смещается в низкочастотную область с помощью гетеродина и преобразуется в последовательность импульсов посредством компаратора. Далее полученный сигнал в виде частоты импульсов поступает в блок обработки данных для выделения управляющего сигнала, который подают в виде постоянного и переменного напряжения на пьезодвигатели для настройки периметра резонатора гироскопа на максимум частоты биений двух генерируемых волн ортогональных поляризаций одного направления распространения. Технический результат – обеспечение возможности управления длиной резонатора в четырехчастотном лазерном гироскопе с использованием в качестве информационного сигнала частоты сигнала биений волн ортогональной поляризации одного направления распространения. 1 з.п. ф-лы, 5 ил.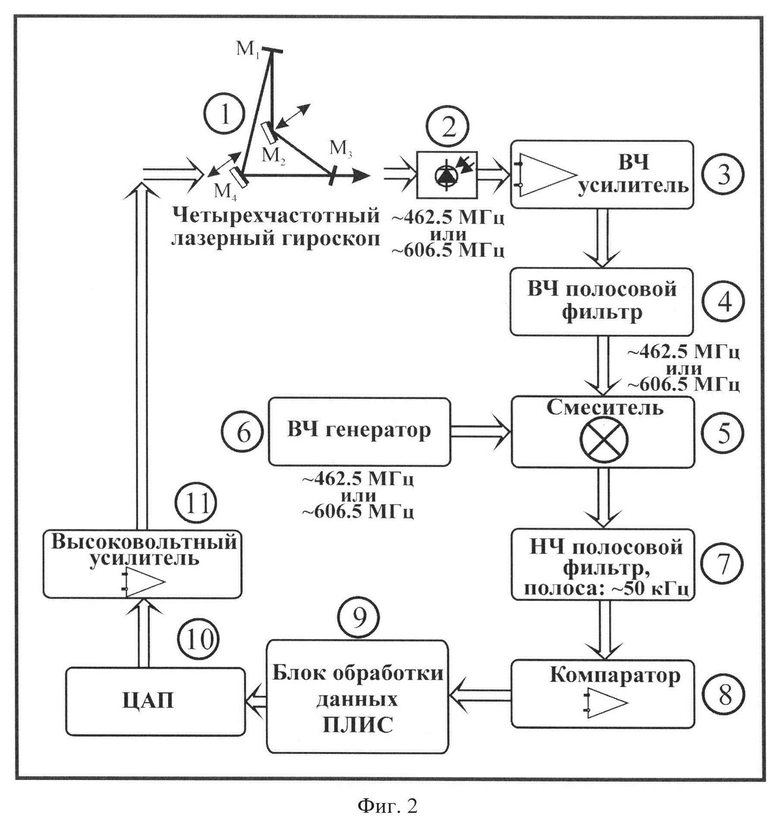
1. Способ управления длиной резонатора в четырехчастотных лазерных гироскопах, заключающийся в том, что осуществляют детектирование сигнала биений, направляя на фотодетектор пучок излучения левой и правой круговой поляризации с частотами, генерируемыми в одном направлении обхода резонатора, после детектирования частота сигнала смещается в низкочастотную область с помощью гетеродина и преобразуется в последовательность импульсов посредством компаратора, далее полученный сигнал в виде частоты импульсов поступает в блок обработки данных для выделения управляющего сигнала, который подают в виде постоянного и переменного напряжения на пьезодвигатели для настройки периметра резонатора гироскопа на максимум частоты биений двух генерируемых волн ортогональных поляризаций одного направления распространения.
2. Способ по п. 1, отличающийся тем, что осуществляют дополнительную регистрацию частоты биений двух генерируемых волн ортогональных поляризаций, распространяющихся в направлении, противоположном исходному по п. 1, с помощью использования дополнительного фотоприемника и последующей настройкой периметра резонатора гироскопа на максимум суммы двух частот биений пар волн одного направления распространения.
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2531028C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2530481C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| CN 109489686 B, 17.04.2020. | |||

