Система регулировки периметра зеемановского лазерного гироскопа
Изобретение относится к гироскопам и измерительной технике и может быть использовано для регулировки периметра зеемановского лазерного гироскопа (ЗЛГ).
Известно устройство [RU 2270454, С2, G01R 25/00, G01R 27/28, 22.02.2006], содержащее два двухканальных мультиплексора, выходы которых подключены к входам измерителя временных сдвигов, выход измерителя временных сдвигов подключен к входу блока вычисления оценки разности группового времени запаздывания, входы одного из мультиплексоров подключаются к входам исследуемого усилителя, а входы другого мультиплексора - к выходам усилителя, при этом разность группового времени запаздывания сигналов, поступающих с выходов тестируемого усилителя, измеряется путем поочередного измерения запаздывания, возникающего в каждом из каналов усилителя.
Недостатком устройства являются относительно узкие функциональные возможности.
Известно также устройство [RU 136586, U1, G01R 29/02, H01S 3/083, 10.01.2014], содержащее первый делитель напряжения, коробку соединительную, первый и второй входы которой соединены с первым и вторым выходами датчика лазерных гироскопов, а группа входов соединена с группой выходов первого делителя напряжения, второй делитель напряжения, группа входов которого соединена с группой входов датчика лазерных гироскопов и с группой выходов коробки соединительной, выход которой соединен с входом второго делителя напряжения, а также осциллограф, первый вход которого соединен с выходом первого делителя напряжения, а второй и третий входы соединены с первым и вторым выходами второго делителя напряжения соответственно.
Недостатком этого устройства также является относительно узкие функциональные возможности.
Кроме указанных выше, известна система регулировки периметра зеемановского лазерного гироскопа [Система регулировки периметра для зеемановского кольцевого лазера с настройкой на продольную моду с заданной четностью. Электронная техника. Лазерная техника и оптоэлектроника. Вып.1(57), 1991, стр. 68], включающая фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор, синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом синхронного детектора, и усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера.
Эта система является замкнутой системой регулирования, использующая в качестве сигнала рассогласования сигнал интенсивности излучения в одном луче кольцевого лазера, а в качестве регулирующего элемента пьезоэлектрический привод кольцевого лазера.
Недостатком этой системы является относительно низкая точность, вызванная возникновением разности интенсивностей встречных волн, причиной которой, в частности, является анизотропия круговой поляризации встречных волн и неравенство коэффициента рассеяния встречных волн в резонаторе.
Наиболее близким по технической сущности к предложенной является система регулировки периметра зеемановского лазерного гироскопа [RU 2589756, C1, G01R 29/02, H01S 3/083, 10.07.2016], включающая фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор, первый синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом первого синхронного детектора, и усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера, второй синхронный детектор, первый вход которого является входом сигнала знакопеременной подставки, а второй вход соединен с выходом усилителя, интегратор, вход которого соединен с выходом второго синхронного детектора, и синхронный модулятор, первый вход которого является входом сигнала знакопеременной подставки, второй вход соединен с выходом интегратора, а выход соединен со вторым входом усилителя.
Эта система хорошо работает для ЗЛГ с одноизотопной по неону активной средой, поскольку рабочая точка совпадает с максимумом частотной подставки и тем самым обеспечивается минимальная вибрационная ошибка ΔΩв, зависящая от величины статической расстройки Δλ0 [Особенности работы системы регулировки периметра резонатора и вибрационная ошибка зеемановского лазерного гироскопа на 50% смеси изотопов неона. «Вестник МГТУ им. Н.Э. Баумана», сер. Приборостроение, №6, 2018, с. 75-86]:

где Т - период коммутации подставки, ν - частота вибрации, ΔL - амплитуда вибрационного изменения периметра резонатора, fo - амплитуда частотной подставки при ΔL=0, χ - константа, зависящая от амплитуды частотной подставки, усиления активной среды, уровня потерь в резонаторе, ϕ0 - разность фаз между механической вибрацией и знакопеременным током блока частотной подставки (БЧП).
Однако для ЗЛГ с двухизотопной по неону активной средой, минимумы Апер и частотной подставки f от относительной расстройки периметра резонатора ЗЛГ Δλп не совпадают: (статья та же) и Δλ0 оказывается не равным нулю, что существенно, до 5 раз, увеличивает вибрационную ошибку.
Задачей, которая решается в предложенном изобретении, является повышение точности регулировки для ЗЛГ с двухизотопной по неону активной средой или аналогичных им.
Требуемый технический результат заключается в повышении точности регулировки периметра зеемановского лазерного гироскопа.
Поставленная задача решается, а требуемый технический результат достигается тем, что, в систему, включающую первое зеркало с пьезоприводом, включенное в кольцевой лазер, содержащий отражающее зеркало, а также блок частотной подставки, катушки которого включены в плечи кольцевого лазера, и генератор синхроимпульсов, первый выход которого соединен с входом блока частотной подставки, согласно изобретению, введены включенные в кольцевой лазер второе зеркало с пьезоприводом и оптический смеситель, а также инвертор, вход которого соединен с первым выходом генератора синхроимпульсов, усилитель переменного напряжения, вход которого соединен с выходом фотоприемника, соединенного с отражающим зеркалом, усилитель с управляемой амплитудой и фазой, первый вход которого соединен со вторым выходом генератора синхроимпульсов, синхронный детектор, первый, второй и третий входы которого соединены, соответственно, с выходом усилителя с управляемой амплитудой и фазой, с выходом инвертора и с выходом усилителя переменного напряжения, интегратор, вход которого соединен с выходом синхронного детектора, выход которого через усилитель соединен с управляющим входом первого зеркала с пьезоприводом, аналого-цифровой преобразователь, вход которого соединен с выходом усилителя, блок счетчиков импульсов сигналов Sin и Cos, вход которого соединен с выходом оптического смесителя, процессор, первый вход которого соединен с выходом блока счетчиков импульсов, второй вход соединен с выходом аналого-цифрового преобразования и который выполнен с возможностью подсчета разности импульсов сигналов Sin и Cos и выработки сигнала управления, пропорционального этой разности, и цифро-аналоговый преобразователь, вход которого соединен с выходом процессора, а выход соединен со вторым входом усилителя с управляемой амплитудой и фазой.
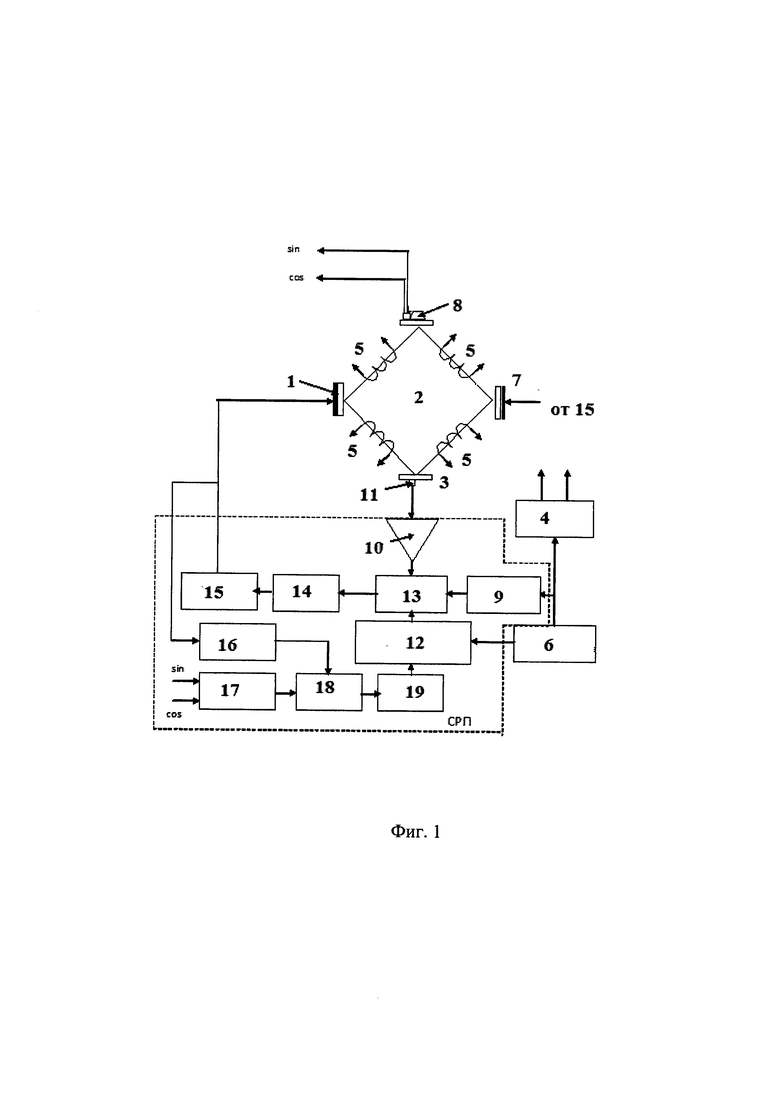
На чертеже представлена функциональная схема системы регулировки периметра зеемановского лазерного гироскопа.
Система регулировки периметра (СРП) зеемановского лазерного гироскопа содержит первое зеркало 1 с пьезоприводом, включенное в кольцевой лазер 2, содержащий отражающее зеркало 3.
Система регулировки периметра зеемановского лазерного гироскопа содержит также блок 4 частотной подставки, катушки 5 которого включены в плечи кольцевого лазера 2, и генератор 6 синхроимпульсов, первый выход которого соединен с входом блока 4 частотной подставки.
Кроме того, система регулировки периметра зеемановского лазерного гироскопа содержит включенные в кольцевой лазер 2 второе зеркало 7 с пьезоприводом и оптический смеситель 8.
Система имеет в своем составе инвертор 9, вход которого соединен с первым выходом генератора 6 синхроимпульсов, усилитель 10 переменного напряжения, первый вход которого соединен с выходом фотоприемника 11, соединенного с отражающим зеркалом 3, усилитель 12 с управляемой амплитудой и фазой, первый вход которого соединен со вторым выходом генератора 6 синхроимпульсов, синхронный детектор 13, первый, второй и третий входы которого соединены, соответственно, с выходом усилителя 12 с управляемой амплитудой и фазой, с выходом инвертора 9 и с выходом усилителя 10 переменного напряжения.
Помимо указанных выше элементов, система регулировки периметра зеемановского лазерного гироскопа содержит интегратор 14, вход которого соединен с выходом синхронного детектора 13, выход которого через усилитель 15 соединен с управляющим входом первого зеркала 1 с пьезоприводом, а также аналого-цифровой преобразователь 16, вход которого соединен с выходом усилителя 15, блок 17 счетчиков импульсов сигналов sin и cos, вход которого соединен с выходом оптического смесителя 8, процессор 18, первый вход которого соединен с выходом блока 17 счетчиков импульсов, второй вход соединен с выходом аналого-цифрового преобразования 16 и который выполнен с возможностью подсчета разности импульсов сигналов sin и cos и выработки сигнала управления, пропорционального этой разности, а также цифро-аналоговый преобразователь 19, вход которого соединен с выходом процессора 18, а выход соединен со вторым входом усилителя 12 с управляемой амплитудой и фазой.
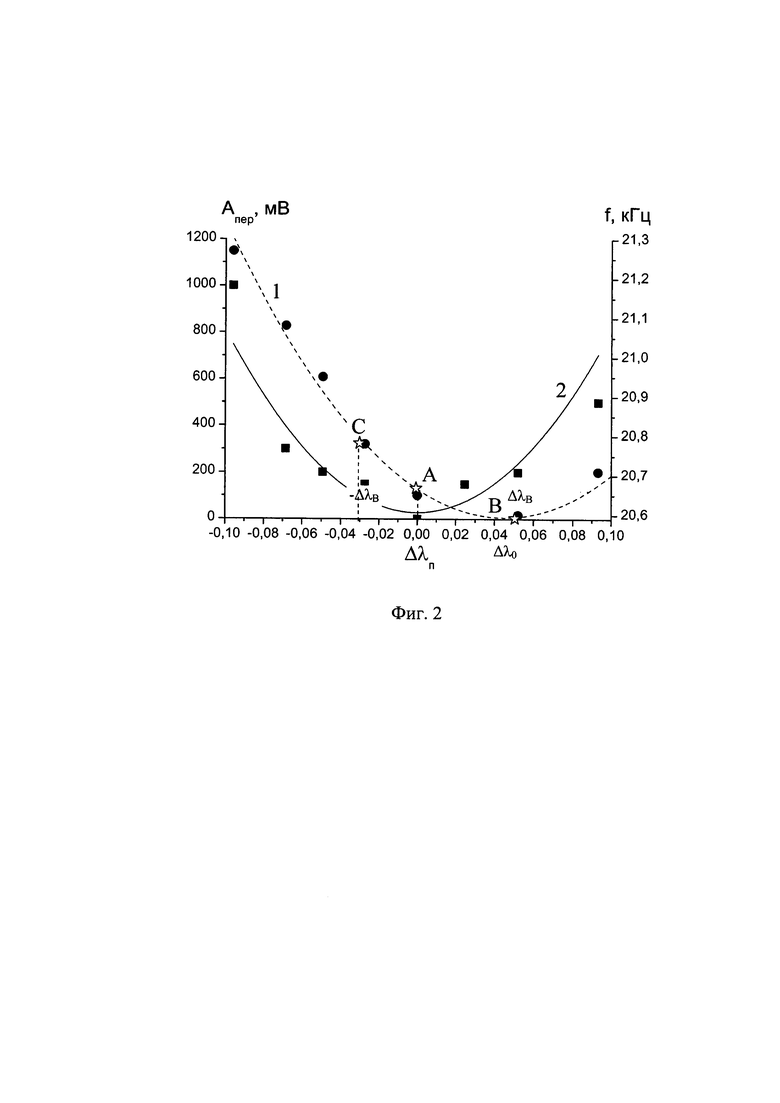
На фиг. 1 представлена функциональная схема системы регулировки периметра зеемановского лазерного гироскопа, на фиг. 2 - зависимость амплитуды сигнала на фотоприемнике Апер (сплошная кривая) и частотной подставки f (штрих пунктирная кривая) от относительной расстройки периметра резонатора зеемановского лазерного гироскопа (ЗЛГ) Δλп для одноизотопного ЗЛГ.
Работает система регулировки периметра зеемановского лазерного гироскопа следующим образом.
После включения система регулировки периметра зеемановского лазерного гироскопа по сигналу от фотоприемника, соединенного с отражающим зеркалом 3, система настраивается в точку А (фиг. 2). При этом сигнал цифро-аналогового преобразователя 19 близок к нулю и переменный сигнал частотой коммутации тока блока 4 частотной подставки также близок к нулю. После этого измеряют частоту fA выходных сигналов sin и cos, а также напряжение UA на первом 1 и втором 7 зеркалах с пьезоэлектрическими двигателями.
Затем на выходе цифро-аналогового преобразователя 19 выставляют сигнал, равный сигналу фотоприемника 11, соединенного с отражающим зеркалом 3 при расстройке периметра на +0,05λ. (точка В на фиг. 2) амплитудой АперВ, после чего измеряют частоту fB выходных сигналов sin и cos. Одновременно с этим измеряют напряжение UB на первом 1 и втором 7 зеркалах с пьезоэлектрическими двигателями и на выходе цифро-аналогового преобразователя 19 выставляют сигнал, равный сигналу от фотоприемника 11, соединенного с отражающим зеркалом 3 при расстройке периметра на -0,05λ. (точка С на фиг. 2) также амплитудой АперВ, после чего измеряют частоту fC выходных сигналов sin и cos и напряжение UC на первом 1 и втором 7 зеркалах с пьезоэлектрическими двигателями.
По измеренным значениям напряжений на первом 1 и втором 7 зеркалах с пьезоэлектрическими двигателями UA, UB, UC (фиг. 2) и исходя из зависимость частот f (линия 1) выходных сигналов sin и cos (линия 1), а также зависимости амплитуды Апер (линия 2) от расстройки периметра Δλ, которые носят квадратичный характер

Тогда Δλв=((UB-UA)+(UC-UB)/2)/(2⋅Uλ), KA=АперВ/Δλ2в, где Uλ - измеренное на этапе заводской регулировки изменение напряжения на первом 1 и втором 7 зеркалах с пьезоэлектрическими двигателями, соответствующее изменение длины периметра ЗЛГ на длину волны генерируемого света.
Из значений Δλв, fA, fB, fC по формуле (2) определяют коэффициент χ, статическую расстройку Δλ0 и соответствующее ему Апер0:



Далее на выходе цифро-аналогового преобразователя 19 выставляют сигнал, равный Апер0 и система настроит периметр в точку, соответствующую минимуму частоты выходных сигналов sin и cos и полностью скомпенсирует статическую расстройку периметра.
В результате система регулировки периметра зеемановского лазерного гироскопа может парировать короткие механические удары, а также высокочастотные вибрации. При этом, как показывают экспериментальные исследования, вибрационная ошибка для зеемановского лазерного гироскопа с двухизотопной по неону смесью уменьшается примерно в 8 раз.
В результате статическая расстройка периметра для любого типа зеемановских лазерных гироскопов стремится к нулю, что приводит к существенному уменьшению вибрационной ошибки, чем и достигается требуемый технический результат, заключающийся в повышении точности регулировки периметра зеемановского лазерного гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2724242C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| Способ и устройство для выделения информации о вращении в четырехчастотном зеемановском лазерном гироскопе | 2023 |
|
RU2810720C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
Изобретение относится к гироскопам. Система регулировки периметра зеемановского лазерного гироскопа включает первое зеркало с пьезоприводом, включенное в кольцевой лазер, содержащий отражающее зеркало, а также блок частотной подставки, катушки которого включены в плечи кольцевого лазера, и генератор синхроимпульсов, первый выход которого соединен с входом блока частотной подставки, включенные в кольцевой лазер второе зеркало с пьезоприводом и оптический смеситель. Также система содержит инвертор, усилитель переменного напряжения, усилитель с управляемой амплитудой и фазой, синхронный детектор, интегратор, аналого-цифровой преобразователь, блок счетчиков импульсов сигналов Sin и Cos, вход которого соединен с выходом оптического смесителя, процессор, а также цифро-аналоговый преобразователь. Технический результат заключается в обеспечении возможности повышения точности регулировки периметра гироскопа. 2 ил.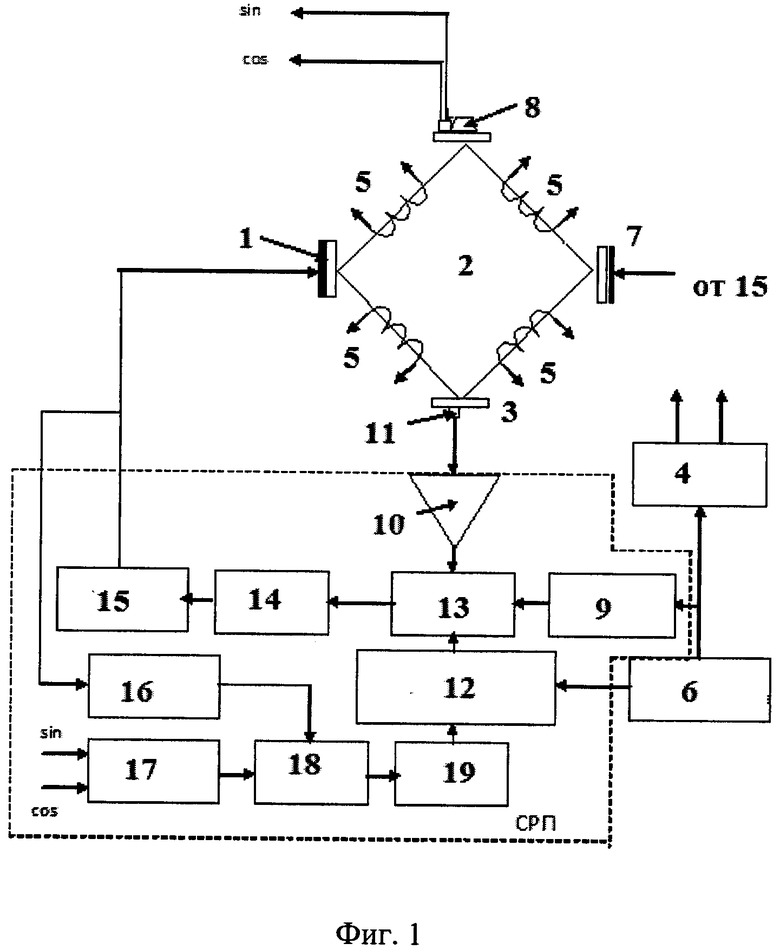
Система регулировки периметра зеемановского лазерного гироскопа, включающая включающую первое зеркало с пьезоприводом, включенное в кольцевой лазер, содержащий отражающее зеркало, а также блок частотной подставки, катушки которого включены в плечи кольцевого лазера, и генератор синхроимпульсов, первый выход которого соединен с входом блока частотной подставки, отличающаяся тем, что введены включенные в кольцевой лазер второе зеркало с пьезоприводом и оптический смеситель, а также инвертор, вход которого соединен с первым выходом генератора синхроимпульсов, усилитель переменного напряжения, вход которого соединен с выходом фотоприемника, соединенного с отражающим зеркалом, усилитель с управляемой амплитудой и фазой, первый вход которого соединен со вторым выходом генератора синхроимпульсов, синхронный детектор, первый, второй и третий входы которого соединены, соответственно, с выходом усилителя с управляемой амплитудой и фазой, с выходом инвертора и с выходом усилителя переменного напряжения, интегратор, вход которого соединен с выходом синхронного детектора, выход которого через усилитель соединен с управляющим входом первого зеркала с пьезоприводом, аналого-цифровой преобразователь, вход которого соединен с выходом усилителя, блок счетчиков импульсов сигналов Sin и Cos, вход которого соединен с выходом оптического смесителя, процессор, первый вход которого соединен с выходом блока счетчиков импульсов, второй вход соединен с выходом аналого-цифрового преобразования и который выполнен с возможностью подсчета разности импульсов сигналов Sin и Cos и выработки сигнала управления, пропорционального этой разности, и цифро-аналоговый преобразователь, вход которого соединен с выходом процессора, а выход соединен со вторым входом усилителя с управляемой амплитудой и фазой.
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| CN 103033178 B, 27.05.2015 | |||
| US 4872754 A1, 10.10.1989 | |||
| JP 54139393 A, 29.10.1979. | |||

