Изобретение относится к области автотранспорта и радиосвязи и используется для обеспечения безопасности дорожного движения с участием беспилотных транспортных средств.
Развитие транспортных систем предполагает массовое внедрение как транспортных средств с высокой степенью автономности, так и полностью автономного беспилотного транспорта. Движение полностью автономного транспорта происходит без участия человека в качестве водителя.
Беспилотные автомобили движутся, как правило, по выделенным полосам движения согласно заданному пользователем маршруту. Управление такими автомобилями осуществляется компьютерной системой, расположенной на борту автомобиля, использующей для оценки окружающей обстановки различные датчики, такие как видеокамеры, лидары, радиолокаторы и т.п., которыми оснащен беспилотный автомобиль. Датчики позволяют распознавать тип окружающих объектов, соблюдать разметку, считывать дорожные знаки и сигналы светофоров, оценивать расстояние от беспилотного автомобиля до других объектов, расположенных и/или движущихся по дороге, оценивать свою траекторию движения и траекторию движения окружающих объектов. Эта информация используется для управления беспилотным транспортным средством.
Важной задачей является контроль движения беспилотного транспорта с помощью внешней независимой от транспортного средства системы с целью вычленения неисправных беспилотных автомобилей, передвижение которых создает опасность для окружающих. Неисправность беспилотного автомобиля с точки зрения возможности управления им может быть связана как с неисправностью датчиков, так и со сбоями в системе управления, приводящими, например, к некорректному распознаванию дорожного знака или разметки.
Из уровня техники известны системы обеспечения безопасности дорожного движения, которые позволяют эффективно контролировать правонарушения, соблюдение скоростного режима и т.п. и обеспечивать безопасность движения пилотируемого транспорта с водителем (RU 96436, опубл. 27.07.2010, RU 2369905, опубл: 10.10.2009). Однако такие системы не предназначены для управления движением беспилотного транспорта и не обеспечивают его своевременную остановку в случаях неисправности и т.п., что представляет собой серьезную угрозу для участников дорожного движения, создавая аварийные ситуации на дорогах.
Известна также система контроля соблюдения транспортом скоростного режима, правил дорожного движения, в которой используется ограниченная по дальности действия радиосвязь и устройство приема-передачи радиосигнала в качестве компонентов системы для отслеживания нарушителей правил дорожного движения, скоростного режима на дороге и отслеживания загруженности дорог (RU 2506646, опубл. 10.02.2014).
Существенным недостатком такой системы является отсутствие технической возможности воздействия на беспилотный автомобиль с целью его остановки при обнаружении нарушений безопасности его движения, например, из-за неисправности датчиков, с помощью которых беспилотный автомобиль анализирует свое местоположение относительно других объектов на дороге. В этом случае беспилотный автомобиль должен быть остановлен на месте, как только будет обнаружена неисправность или выполнен перехват управления для остановки транспортного средства в месте, создающем минимальную помеху остальным участникам движения.
Кроме того, известная система не позволяет фиксировать достаточно большой набор правонарушений, связанных с контролем движения по полосе, поворотов из разрешенных полос движения, движение через сплошную и двойную сплошную линии разметки и т.д. Фиксация этих нарушений особенно важна для беспилотных автомобилей.
Техническая задача - это обеспечение безопасности дорожного движения с участием беспилотных транспортных средств.
Технический результат заключается в создании автоматизированной системы обеспечения безопасности дорожного движения, отслеживающей соблюдение правил дорожного движения беспилотным транспортом и позволяющей своевременно осуществлять перехват управления и остановку беспилотных транспортных средств, движущихся с нарушениями.
Из уровня техники не известны системы, способные решить указанную техническую задачу и получить указанный технический результат, т.е. осуществить своевременную остановку беспилотных транспортных средств, тем самым обеспечивая безопасность участников дорожного движения.
Технический результат достигается тем, что автоматизированная система обеспечения безопасности дорожного движения с участием беспилотных транспортных средств содержит бортовые телекоммуникационные узлы (БТУ), размещенные на беспилотном транспортном средстве (БТС), оснащенном спутниковой системой навигации и блоком управления БТС, дорожные телекоммуникационные узлы (ДТУ), установленные вдоль дороги, и платформу интеллектуальной транспортной системы (ИТС), которая выполнена с возможностью удаленной диагностики и осуществления перехвата управления БТС, при этом каждая ДТУ содержит центральный процессор ДТУ, блок памяти ДТУ, радиоинтерфейс ДТУ, выполненный с возможностью одновременного обмена данными со всеми БТУ, находящимися в радиусе действия ДТУ, высокоточный приемник глобальных навигационных систем (ГНСС), причем каждый ДТУ через интерфейс связан с платформой ИТС, которая выполнена с возможностью получения информации о дорожной ситуации в результате обмена информацией с БТУ всех БТС, находящихся в радиусе действия их ДТУ, БТУ содержит центральный процессор БТУ с блоком памяти, приемник спутниковой навигационной системы и радиоинтерфейс БТУ, а БТУ БТС через CAN шину связан с блоком управления БТС, центральный процессор БТУ выполнен с возможностью непрерывного анализа CAN шины на предмет появления сообщений из блока управления БТС, их анализа, а также подачи команды на торможение БТС и включение аварийных огней.
Система позволяет управлять движением беспилотного транспорта за счет осуществления независимого автоматизированного контроля и вычленения в потоке транспортных средств таких, которые движутся с нарушениями правил дорожного движения из-за возникших неисправностей на борту беспилотного транспортного средства, обеспечив реагирование системы на неисправность беспилотного транспортного средства. При этом решается задача оптимизации дорожной инфраструктуры.
Информация о дорожной ситуации, поступающая на платформу интеллектуальной транспортной системы ИТС, позволяет принимать различные решения по нейтрализации опасной ситуации с учетом внешней обстановки в результате того, что каждый дорожный телекоммуникационный узел ДТУ выполнен с возможностью обмена информацией со всеми беспилотными транспортными средствами БТС, находящимися в зоне его действия, а также с платформой ИТС.
Изобретение иллюстрируется следующими фигурами.
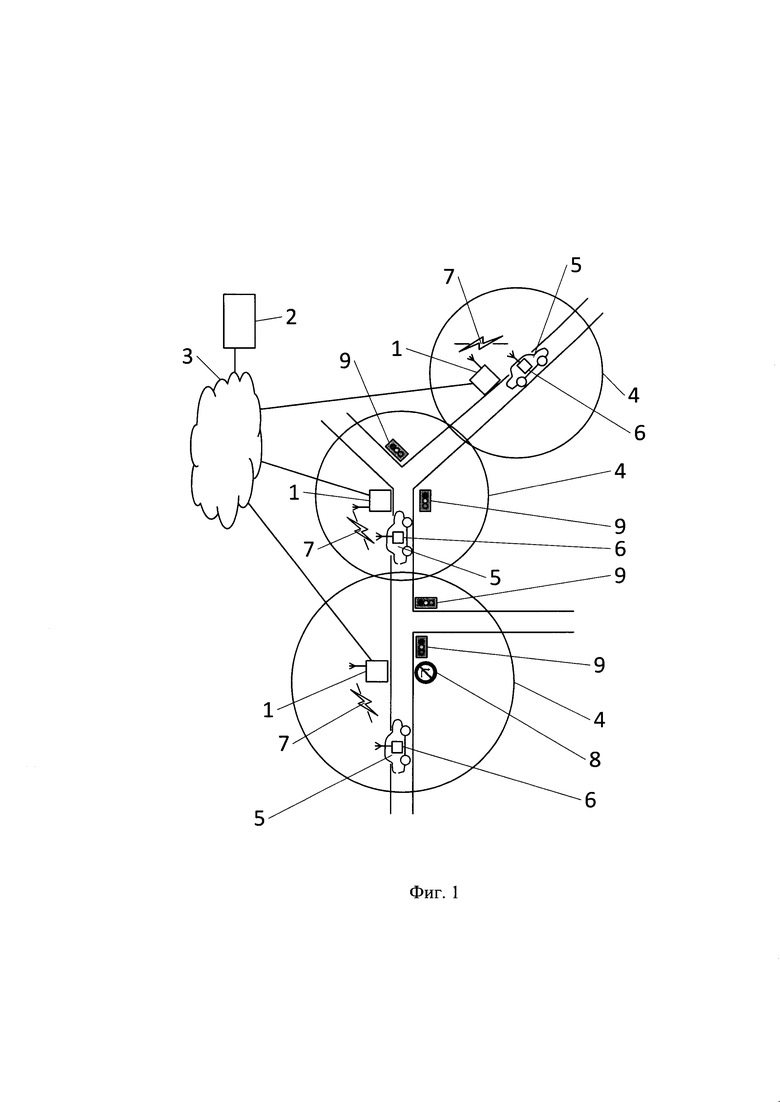
На фиг. 1 схематично изображена заявляемая автоматизированная система.
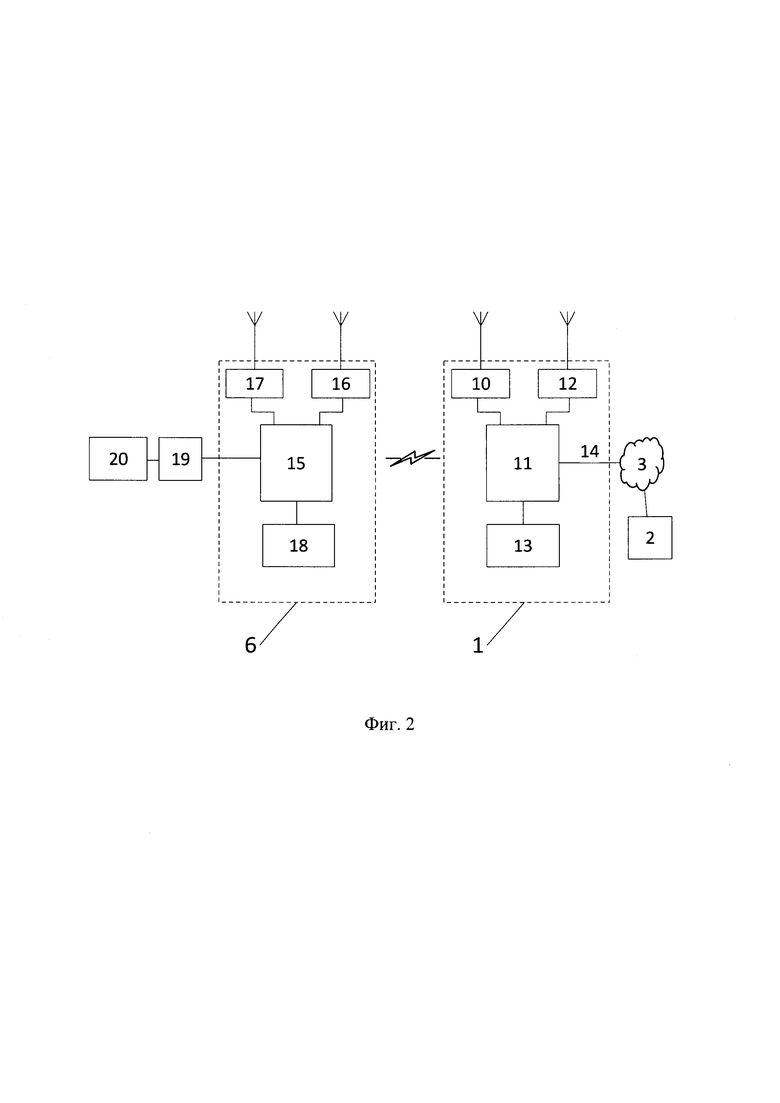
На фиг. 2 представлена схема взаимодействия ДТУ и БТУ в процессе работы автоматизированной системы.
На фиг. 1 и 2 изображены:
1 - дорожный телекоммуникационный узел ДТУ;
2 - платформа интеллектуальной транспортной системы ИТС;
3 - сеть передачи данных;
4 - зона действия радиосигнала ДТУ;
5 - беспилотное транспортное средство БТС;
6 - бортовой телекоммуникационный узел БТУ;
7 - радиосвязь между ДТУ и БТС;
8 - дорожный знак;
9 - светофор;
10 - радиоинтерфейс ДТУ;
11 - центральный процессор ДТУ;
12 - высокоточный приемник ГНСС;
13 - блок памяти ДТУ;
14 - интерфейс ДТУ;
15 - центральный процессор БТУ;
16 - радиоинтерфейс БТУ;
17 - приемник ГНСС;
18 - блок памяти БТУ;
19 - CAN шина БТС;
20 - блок управления БТС.
Каждый ДТУ 1 имеет зону действия радиосигнала 4 и взаимодействует по радиоканалу с БТУ 6, находящимся в его зоне действия 4. ДТУ 1 может взаимодействовать одновременно со всеми БТУ 6, находящимися в этой зоне действия 4. ДТУ 1 установлены вдоль автодороги в произвольных точках таким образом, чтобы расстояние между соседними ДТУ 1 позволяло обеспечить уверенную передачу/прием сигналов от БТУ 6, находящегося в зоне действия одного ДТУ 1 и переключалось на взаимодействие с другим ДТУ 1, когда взаимодействие с первым ДТУ 1 из-за удаленности от него БТУ 6 станет невозможным или когда сигнал от второго ДТУ 1 станет большим по мощности, чем от первого ДТУ 1. Таким образом, не требуется установка более чем одного ДТУ 1 на перекрестках, если зона действия 4 одного ДТУ 1 «покрывает» площадь всего перекрестка. Не требуется у светофоров 9 и запрещающих знаков устанавливать отдельные ДТУ 1.
ДТУ 1 связаны через сеть передачи данных 3 с платформой ИТС 2. Вдоль дорог размещены объекты, регулирующие дорожное движение: дорожные знаки 8, светофоры 9 и т.п.
ДТУ 1 снабжен радиоинтерфейсом 10 с антенной, а БТУ 6 имеют по радиоинтерфейсу 16 с антенной, позволяющие им обмениваться данными. ДТУ 1 способен через радиоинтерфейс 10 одновременно обмениваться данными со многими БТС 5, находящимися в его радиусе действия. ДТУ 1 также имеет интерфейс 14, позволяющий ему обмениваться данными через сеть передачи данных 3 с платформой ИТС 2. Обмен данными между БТУ 6, установленном на БТС 5, и платформой ИТС 2 осуществляется через ДТУ 1, работой которого управляет центральный процессор 11. Работой БТУ 6 управляет центральный процессор 15.
ДТУ 1 оснащен высокоточным приемником глобальных навигационных систем ГНСС 12 с антенной, выполняющим роль базовой станции системы дифференциальной коррекции, способной формировать поправки RTK и передает эти поправки центральному процессору 11. Поправки RTK рассчитываются центральным процессором 11 ДТУ 1 и передаются по радиоинтерфейсу 10 ДТУ 1 на радиоинтерфейс 16 БТУ 6 БТС 5, откуда они поступают на центральный процессор 15 БТУ 6. На центральный процессор 15 поступают также навигационные данные от приемника ГНСС 17. Корректировка навигационных данных от приемника ГНСС 17 с учетом поправок RTK, сформированных высокоточным приемником ГНСС 12 ДТУ 1 позволяет вычислить более точные географические координаты местонахождения БТС 5, при этом обеспечивается сантиметровая точность определения координат. В качестве ГНСС могут использоваться, например, спутниковые группировки GPS и/или ГЛОНАСС (GPS/ГЛОНАСС).
В блоке памяти 13 ДТУ 1 хранится высокоточная карта дорожной инфраструктуры с сантиметровым разрешением с указанием всей разметки (на фиг. 1 не показана), расположением и назначением знаков 8 и расположением светофоров 9, соответствующая площади зоны действия радиосигнала данного ДТУ 1. Карта периодически обновляется платформой ИТС 2 с учетом изменений в дорожной инфраструктуре (установка/замена/демонтаж дорожных знаков и т.п.). Кроме карты, платформа ИТС 2 передает в ДТУ 1, а ДТУ 1 транслирует в БТУ 6 беспилотных БТС 5 информацию о режимах работы светофоров 9, находящихся в зоне действия 4 ДТУ 1. Информация о состоянии светофоров 9 обновляется из платформы ИТС 2 при каждом изменении их сигнала. Аналогичная карта хранится в блоке памяти 18 БТУ 6 автомобиля БТС 5, а информация в блок памяти 18 БТУ 6 о режиме работы светофоров 9 поступает из ДТУ 1. Карта в блок памяти 18 БТУ 6 передается через радиоинтерфейс 16 от радиоинтерфейса 10 ДТУ 1 при первом посещении автомобилем БТС 5 зоны «покрытия» данного ДТУ 1. Карта в блоке памяти 18 БТУ 6 обновляется, если в процессе радиообмена ДТУ 1 и БТУ 6 будет выяснено, что карта, находящаяся в БТУ 6, уже неактуальна.
Центральный процессор 15 БТУ 6 соединен через CAN шину 19 автомобиля БТС 5 с блоком управления 20, что позволяет ему считывать диагностические данные с блока управления 20 (скорость, ошибки в работе узлов автомобиля, остаток топлива и т.д.), а также, в случае необходимости, передавать команды центрального процессора 15 БТУ 6 в блок управления 20.
Предлагаемая система функционирует следующим образом.
При движении БТС 5 по дороге под управлением имеющейся на его борту компьютерной системы управления (не показана), использующей информацию от датчиков (не показаны), центральный процессор 15 БТУ 6 выполняет анализ соблюдения БТС 5 правил дорожного движения. Для этого центральным процессором 15 БТУ 6 анализируются данные о местоположении автомобиля БТС 5 и сравниваются с картой и с информацией о состоянии светофоров 9, хранящейся в блоке памяти 18 БТУ 6. Карта имеет сантиметровую точность и высокую информативность. Позиционирование БТС 5 на карте также имеет сантиметровую точность. Центральный процессор 15 БТУ 6 выполняет алгоритмы выявления нарушения скоростного режима, запрещающих знаков, запрещающих сигналов светофоров 9. На основании соотнесения высокоточной карты с координатами БТС 5 центральный процессор 15 определяет также факты нарушения разметки (сплошные и двойные сплошные линии), пересечение стоп-линий при остановке перед светофором 9, маневры при повороте/развороте из запрещенного ряда. Кроме того, центральный процессор 15 непрерывно анализирует CAN шину 19 БТС 5 на предмет появления сообщений в ней от блока управления 20 БТС 5 о возникновении неисправностей устройств и систем.
При выявлении нарушений правил дорожного движения, что может быть связано с неисправностью датчиков или помехами для их работы со стороны окружающей среды (загрязнение, смог, снег и т.п.), а также при получении информации от блока управления 20 центральный процессор 15 БТУ 6 через радиоинтерфейс 16 сообщает в ДТУ 1 о фактах обнаружения нарушений и/или дефектов. Центральный процессор 11 ДТУ 1 анализирует эти сообщения и на основе заложенных в его программе критериев принимает решение о необходимости остановки БТС 5, а также сообщает об этом через интерфейс 14 и через сеть передачи данных 3 в платформу ИТС 2, при этом ДТУ 1 передает в БТУ 6 и далее через CAN шину 19 в блок управления 20 команду на осуществление торможения БТС 5 и включение аварийных огней.
Кроме информации об остановке БТС 5 в платформу ИТС 2 передаются индивидуальные данные автомобиля (марка, цвет, государственный номер, VIN код, владелец, географические координаты автомобиля). После остановки БТС 5 платформа ИТС 2 анализирует и применяет следующие возможные сценарии реагирования:
- оставить автомобиль без движения и еще раз провести его удаленную диагностику;
- по результатам диагностики, если это допустимо, осуществить перехват управления и под управляющими воздействиями платформы ИТС 2, которые транслируются через сеть передачи данных 3 в ДТУ 1, далее через радиоинтерфейс 10 в БТУ 6 и далее на CAN шину 19 автомобиля БТС 5, осуществить съезд на обочину или медленное движение по полосе, выделенной для движения беспилотного транспорта до места удобной парковки, затем затормозить, остановиться и включить аварийные огни.
При этом в платформе ИТС 2 имеется вся информация о возможных препятствиях и о расположении и движении других автомобилей на дороге, их скорости и траектории, которая получена через ДТУ 1 от БТУ 6 других автомобилей БТС 5, и поэтому платформа ИТС 2 способна проанализировать возможность съезда на обочину, а также определить, что обочина свободна от других транспортных средств.
Во всех сценариях реагирования на неисправность ДТУ 1 транслирует команды платформы ИТС 2, получаемые по сети передачи данных 3 через радиоинтерфейс 10 в БТУ 6 неисправного автомобиля БТС 5. Сигналы управления автомобилем БТС 5, генерируемые платформой ИТС 2 (угол открытия дроссельной заслонки, угол поворота руля, усилие на педали тормоза, управление ручным тормозом и т.д.), поступают на радиоинтерфейс 16 БТУ 6, откуда они поступают в центральный процессор 15 БТУ 6 и транслируются через CAN шину 19 в блок управления 20 автомобиля БТС 5.
Выбор сценария управления неисправным автомобилем определяется конкретными видами неисправностей, возникшими на его борту и дорожной ситуацией, учитывающей интенсивность движения, наличие знаков и указателей, состояние светофоров и т.п. Информация о дорожной ситуации, позволяющая принимать то или иное решение, имеется у платформы ИТС 2 в результате того, что ДТУ 1 обменивается информацией со всеми автомобилями БТС 5, находящимися в зоне его действия 4 и с платформой ИТС 2.
Оптимизация в построении инфраструктуры и снижение стоимости системы достигается за счет отсутствия необходимости расстановки ДТУ 1 у каждого значимого элемента инфраструктуры дороги или обозначения с помощью двух ДТУ 1 участков дороги с одним скоростным режимом (начало и конец участка).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304813C1 |
| ВЫЯВЛЕНИЕ ГЛУБИНЫ ВОДЫ ДЛЯ ПЛАНИРОВАНИЯ И ОТСЛЕЖИВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686159C2 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны | 2020 |
|
RU2750942C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2567700C1 |
Изобретение относится к автоматизированной системе обеспечения безопасности дорожного движения с участием беспилотных транспортных средств. Автоматизированная система обеспечения безопасности дорожного движения с участием беспилотных транспортных средств содержит бортовые телекоммуникационные узлы (БТУ), размещенные на беспилотном транспортном средстве (БТС), оснащенном спутниковой системой навигации и блоком управления БТС, дорожные телекоммуникационные узлы (ДТУ), установленные вдоль дороги, и платформу интеллектуальной транспортной системы (ИТС). ИТС выполнена с возможностью удаленной диагностики и осуществления перехвата управления БТС. Каждая ДТУ содержит центральный процессор ДТУ, блок памяти ДТУ, радиоинтерфейс ДТУ, выполненный с возможностью одновременного обмена данными со всеми БТУ, находящимися в радиусе действия ДТУ, высокоточный приемник глобальных навигационных систем (ГНСС). Каждый ДТУ через интерфейс связан с платформой ИТС, которая выполнена с возможностью получения информации о дорожной ситуации в результате обмена информацией с БТУ всех БТС, находящихся в радиусе действия их ДТУ. БТУ содержит центральный процессор БТУ с блоком памяти, приемник спутниковой навигационной системы и радиоинтерфейс БТУ. БТУ БТС через CAN шину связан с блоком управления БТС, центральный процессор БТУ выполнен с возможностью непрерывного анализа CAN шины на предмет появления сообщений из блока управления БТС, их анализа и подачи команды на торможение БТС и включение аварийных огней. Достигается повышение безопасности управления беспилотными транспортными средствами. 2 ил.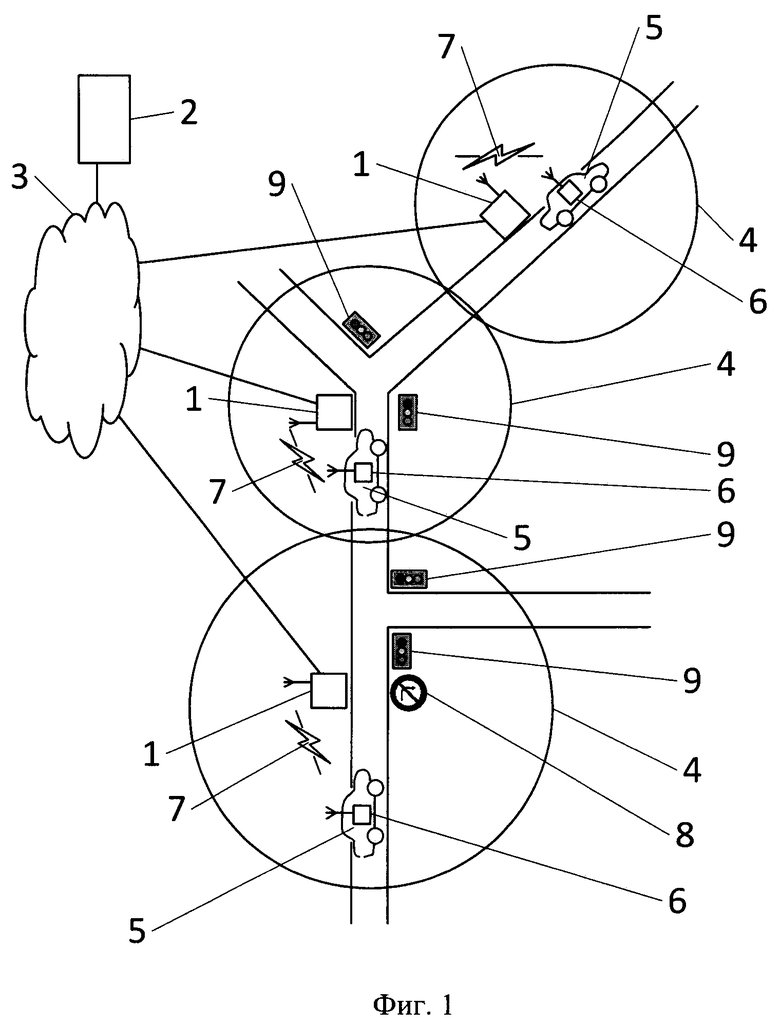
Автоматизированная система обеспечения безопасности дорожного движения с участием беспилотных транспортных средств, содержащая бортовые телекоммуникационные узлы (БТУ), размещенные на беспилотном транспортном средстве (БТС), оснащенном спутниковой системой навигации и блоком управления БТС, дорожные телекоммуникационные узлы (ДТУ), установленные вдоль дороги, и платформу интеллектуальной транспортной системы (ИТС), которая выполнена с возможностью удаленной диагностики и осуществления перехвата управления БТС, при этом каждая ДТУ содержит центральный процессор ДТУ, блок памяти ДТУ, радиоинтерфейс ДТУ, выполненный с возможностью одновременного обмена данными со всеми БТУ, находящимися в радиусе действия ДТУ, высокоточный приемник глобальных навигационных систем (ГНСС), причем каждый ДТУ через интерфейс связан с платформой ИТС, которая выполнена с возможностью получения информации о дорожной ситуации в результате обмена информацией с БТУ всех БТС, находящихся в радиусе действия их ДТУ, БТУ содержит центральный процессор БТУ с блоком памяти, приемник спутниковой навигационной системы и радиоинтерфейс БТУ, а БТУ БТС через CAN шину связан с блоком управления БТС, центральный процессор БТУ выполнен с возможностью непрерывного анализа CAN шины на предмет появления сообщений из блока управления БТС, их анализа и подачи команды на торможение БТС и включение аварийных огней.
| RU 2018144828 A, 18.12.2018 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ТРАНСПОРТНЫХ ПОТОКОВ НА МАГИСТРАЛЯХ | 2014 |
|
RU2585129C2 |
| CN 203966334 U, 26.11.2014. | |||

