Изобретение относится к области использования интеллектуальной транспортной системы управления движением колонны беспилотных транспортных средств с ведущим пилотным транспортным средством и может быть использовано при перевозке грузов, в том числе и воинских грузов в мирное и военное время.
Из предшествующего уровня развития техники известен способ прогностического управления интеллектуальной транспортной системой при управлении движением колонны (см. опубликованную заявку США №US 2017106855, заявитель FORD GLOBAL TECHNOLOGIES, LLC, опубл. 20.04.2017), содержащей ведущее пилотное транспортное средство (ПТС), которое отслеживает нерегулярный рельеф дороги, и, по меньшей мере, одно автоматически управляемое беспилотное транспортное средств (БТС), включающий получение водителем пилотного транспортного средства задания на проводку колонны с ТТХ транспортных средств (ТС), составляющих ее, маршрута движения и комплекта адаптированных под реальные ТТХ каждого беспилотного транспортного средства (БТС) маршрутных карт для каждого из БТС, ответный контроль при движении на маршруте состояния каждого БТС, дорожных и погодных условий, и выполнения действий согласно указанной карты, при выявлении средствами контроля изменения дорожных условий.
Основным недостатком известного способа является ограниченное число средств контроля изменения дорожных условий, которые связаны только с выявлением препятствий для движения ТС и передачей информации по одному каналу связи, что не обеспечивает надежное движение колонны, особенно в условиях, затрудняющих передачу сигналов, в том числе и применения вероятным противником современных средств радиоподавления сигналов в военное время.
Известен способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны (см. патент США №US9511764 В2, заявитель FORD GLOBAL TECHNOLOGIES, LLC, опубл. 06.12.2018), содержащей ведущее ПТС и, по меньшей мере, одно автоматически управляемое беспилотное транспортное средство БТС, включающий получение водителем ПТС задания на проводку колонны с ТТХ ТС, составляющих ее, маршрута движения, прогностическую корректировку по реальному состоянию каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, ответный контроль при движении на маршруте состояния каждого БТС, дорожных и погодных условий, и выполнения действий, при этом используются многоканальные средства передачи информации.
Основным недостатком известного способа является управление БТС на основе реального положения ТС на дороге, что требует передачи и обработки большого массива информации в режиме реального времени. Это усложняет работу и снижает надежность работы системы управления колонной ТС.
Известен способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны (см. патент США №US 9494944 В2, заявитель SCANIA CV АВ, опубл. 15.11.2016), содержащей ПТС и, по меньшей мере, одно БТС, включающий получение водителем пилотного транспортного средства задания на проводку колонны с ТТХ ТС, составляющих ее, маршрута движения для беспилотных транспортных средств, их прогностическую корректировку по реальному состоянию каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, передачу на каждое БТС соответствующего адаптированного к ТТХ ТС описания маршрута, ответный контроль при движении на маршруте состояния каждого БТС, дорожных и погодных условий.
Основным недостатком известного способа является управление БТС на основе реального положения ПТС и стационарного центра обработки и передачи данных на дороге на каждом вновь определенном препятствии, что требует передачи и обработки большого массива информации в режиме реального времени. Это усложняет обработку массива данных и надежность работы системы управления колонной ТС.
Известен способ прогностического управления интеллектуальной транспортной системой при движении колонны в специфических условиях, (см. Международную заявку №WO 2018043753 А1, заявитель NABTESCO AUTOMOTIVE CORP, опубл. 08.03.2018), содержащей ПТС и, по меньшей мере, одно БТС, включающий получение водителем пилотного транспортного средства задания на проводку колонны с ТТХ ТС, ее составляющих, описание маршрута движения и комплекта маршрутных карт для всех транспортных средств, как пилотного, так и беспилотных, адаптирование под реальные ТТХ каждого ТС, их прогностическую корректировку по реальному прогнозу технического состояния каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, передачу на каждое БТС соответствующей адаптированной прогностической маршрутной карты, при движении на маршруте ответный контроль технического состояния каждого БТС, реальных дорожных и погодных условий, и выполнения действий согласно указанной маршрутной карты.
Основным недостатком известного способа является ограниченное число средств, критериев и параметров контроля, касающихся только тормозных свойств ТС и их лобовых аэродинамических сопротивлений, состояния твердого покрытия дорожного полотна и возможная последовательная передача информации по одному каналу связи.
Известен способ прогностического иерархического управления интеллектуальной транспортной системой при движении колонны на территориях с неустойчивым климатом (см. опубликованную международную заявку №WO 2015047179 А1, заявитель SCANIA CV АВ, опубл. 02.04.2015), содержащей ПТС и, по меньшей мере, одно БТС, включающий получение водителем пилотного транспортного средства задания на проводку колонны с ТТХ ТС, составляющих ее, описание маршрута движения и комплекта маршрутных карт для всех транспортных средств, как пилотного, так и беспилотных, адаптирование под реальные ТТХ каждого БТС, их прогностическую корректировку по реальному прогнозу технического состояния каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, передачу на каждое БТС соответствующей адаптированной прогностической маршрутной карты, при движении на маршруте ответный контроль технического состояния каждого БТС, реальных дорожных и погодных условий, и выполнения действий согласно указанной маршрутной карты.
Основным недостатком известного способа является управление БТС на основе реального положения ПТС на дороге и реального рельефа местности с целью получения экономии топлива и максимальной скорости движения. При этом априори считается, что несущая способность дороги и другие ее характеристики не меняются, а меняются только погода и загруженность дорог. Для движения на территориях с холодным климатом и по временным дорогам применение данного способа не эффективно.
Известен способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом по патенту RU 2690143, МПК B60W 30/165, G07C 5/08, от 30.05.2019, основанный на применении иерархического управления интеллектуальной транспортной системой с использованием средств связи и управления, выполненными многоканальными. При этом средства контроля технического состояния и локальных дорожных и погодных условий по маршруту движения каждого БТС в режиме реального времени включают, по меньшей мере, динамически управляемую адаптивную систему круиз-контроля, средства контроля расстояния до ПТС и ближайших БТС, определения состояния поверхности дороги и ее подосновы.
При несомненных достоинствах данного способа, принимаемого за прототип, он имеет низкую эффективность, надежность, ритмичность и стабильность транспортного сообщения, обусловленные следующими факторами:
1. Возможность появления не учтенных в маршруте движения и дорожных картах всех транспортных средств опасных или аварийных ситуаций на дорогах, например, связанных с возникновением чрезвычайных ситуаций природного, техногенного и военного характера.
2. Отсутствие возможностей по использованию высокопроизводительных центров обработки и передачи данных для осуществления корректировки маршрута движения колонны и дорожных карт всех транспортных средств с учетом пропускной способности дорожной сети и ее технического состояния.
Задача, решаемая предлагаемым изобретением, заключается в повышении эффективности, надежности, ритмичности и стабильности транспортного сообщения за счет достижения следующих полезных технических результатов:
обеспечивается возможность эффективной и надежной транспортировки грузов в различных условиях дорожной обстановки, особенно в условиях возникновения чрезвычайных ситуациях природного, техногенного и военного характера;
обеспечивается возможность ритмичной и стабильной транспортировки грузов в условиях низкой пропускной способности дорожной сети и с учетом ее технического состояния.
Сущность изобретения, обеспечивающая достижение указанных технических результатов, заключается в следующем.
В способе прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны, содержащей ПТС и, по крайней мере, одно БТС, включающим получение водителем ПТС задания на проводку колонны ТТХ ТС, ее составляющих, описания маршрута движения и комплекта маршрутных карт для всех ТС, как пилотного, так и беспилотных, адаптирование маршрутных карт под реальные ТТХ ТС, их прогностическую корректировку по реальному прогнозу технического состояния каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, контроль и двустороннюю передачу данных в режиме реального времени о маршруте от ПТС к каждому БТС и обратно о техническом состоянии каждого БТС и о локальных дорожных и погодных условиях по маршруту его движения, отчеты о результатах выполнения действий по движению, соответствующих требованиям маршрутной карты каждого БТС, при этом передачу ведут последовательно через средства связи и управления, выполненные многоканальными, иерархически подчиненными в соответствии с порядком расположения и движения ПТС и БТС в колонне, и обратно, причем водитель ПТС определяет каждый вновь выявленный им реально измененный участок маршрута с определением локальных контрольных точек его начала и окончания, а также типа опасных или измененных маршрута и/или условий движения, перед прохождением которого каждое БТС автоматически по команде из ПТС изменяет маршрут и/или условия движения в маршрутной карте по заранее установленным критериям безопасного движения и после прохождения которых автоматически посылает сигнал о благополучном или аварийном преодолении опасного участка и его локальных контрольных точек, а при каждом невыполнении действий в соответствии с требованиями маршрутной карты или при возникновении аварийной ситуации автоматически посылает на ПТС аварийный сигнал с автоматизированным определением и указанием причины, во время движения периодически осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС в центрах обработки и передачи данных с учетом интенсивности движения транспортных средств, состояния дорожной сети и погодных условий и передают их водителю ПТС с использованием средств дальней связи, а в случае необходимости останавливают колонну водителем ПТС с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат (БЛА), содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с ПТС, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения БЛА к ПТС с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС.
Обозначенная сущность изобретения связана с достижением заявленного технического результата следующим образом соответственно.
1. Введение в известный способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны новых взаимосвязанных действий при управлении колонной, а именно: во время движения периодически осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС в центрах обработки и передачи данных с учетом интенсивности движения транспортных средств, состояния дорожной сети и погодных условий и передают их водителю ПТС с использованием средств дальней связи, а в случае необходимости останавливают колонну водителем ПТС с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат (БЛА), содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с ПТС, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения БЛА к ПТС с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС позволяет обеспечить возможности по ритмичной и стабильной транспортировки грузов в условиях низкой пропускной способности дорожной сети и с учетом ее технического состояния и возможности по эффективной и надежной транспортировке грузов в различных условиях дорожной обстановки, особенно в условиях возникновения чрезвычайных ситуациях природного, техногенного и военного характера;
2. Повышение эффективности, надежности, ритмичности и стабильности транспортного сообщения обеспечивается за счет возможностей по эффективной и надежной транспортировке грузов в различных условиях дорожной обстановки, особенно в условиях возникновения чрезвычайных ситуациях природного, техногенного и военного характера и ритмичной и стабильной транспортировки грузов в условиях низкой пропускной способности дорожной сети и с учетом ее технического состояния (см. п. 1).
Сущность предлагаемого способа заключается в следующем.
Перед выдвижением колонны ТС водитель ПТС получает задание на проводку колонны. Задание включает ТТХ ТС, составляющих формируемую для движения по маршруту колонну, в том числе ПТС и необходимое число БТС, описание маршрута движения и комплект маршрутных карт для каждого из всех ТС, входящих в колонну. Маршрутная карта каждого соответствующего ТС адаптируется под реальные ТТХ конкретного ТС и при этом проводят ее прогностическую корректировку по реальному техническому состоянию каждого соответствующего ТС и прогнозу технического состояния каждого ТС перед выходом на маршрут, например, при этом можно принимать во внимание и учитывать, тем или иным образом, состояние моторесурса двигателя, трансмиссии и его работы с учетом дорожных и погодных условий, механических свойств, степени и неравномерности износа, других характеристик состояния покрышек, колесных дисков, на которые они установлены, степени загрузки, парусности ТС при экстремальном боковом ветре и прогноз о возможности его возникновения, ценности груза и степени загрузки и т.п. Маршрутные карты всех ТС должны корректироваться согласно предполагаемому прогнозу состояния дорожных и погодных условий на маршруте. При движении колонны в маршрутных картах учитываются вновь выявленные неисправности, изменения из-за них ТТХ ТС и выполнение действий согласно указанной маршрутной карты каждым ТС.
Производят передачу на каждое БТС соответствующей вновь составленной, адаптированной под реальные ТТХ ТС прогностической маршрутной карты и во время движения на маршруте осуществляют ответный контроль текущего технического состояния каждого БТС, реальных дорожных и погодных условий, и выполнения им действий согласно его указанной маршрутной карты.
Необходимость контроля текущего состояния каждого БТС определяется тем, что в процессе движения может происходить изменение свойств самого ТС, например, удельного давления на грунт путем изменения давления в шинах, что может приводить к повышению проходимости при его снижении или к увеличению скорости движения при увеличении давления в шинах до оптимального.
Контроль движения ТС по заданному маршруту осуществляется блоком управления, который имеет возможность определять точное местоположение ТС с использованием сигналов, формируемых глобальной навигационной спутниковой системой. При блокировании сигналов навигационной системы положение ТС определяется автономными навигационными системами, например, инерциальными навигационными системами.
При этом при движении колонны на маршруте в режиме реального времени осуществляют контроль и двустороннюю передачу данных о маршруте от ПТС к каждому БТС и обратно о техническом состоянии каждого БТС, о локальных дорожных и погодных условиях по маршруту его движения. При этом передачу ведут последовательно через средства связи и управления, выполненные многоканальными, иерархически подчиненными в соответствии с порядком расположения и движения ПТС и БТС в колонне, и обратно. Также БТС автоматически пересылают отчеты о результатах выполнения действий по движению, соответствующих требованиям маршрутной карты каждого БТС. Многоканальность средств связи позволяет повысить надежность, быстроту и своевременность передачи корректирующих изменений команд управления от ПТС и водителя ПТС в транспортные карты БТС, а также сообщений ПТС и водителя ПТС для БТС о выполнении действий согласно маршрутной карте и ее корректирующих изменений от ПТС к каждому БТС. Надежность передачи информации может обеспечиваться многоканальностью, то есть возможностью передачи данных по разным типам каналов связи, например, таким как, светом, например, лазером в видимом, инфракрасном или ультрафиолетовом диапазонах в условиях больших естественно природных помех, например, таких как магнитная буря, а также в случаях применения вероятным противником современных средств радиоподавления в военное время, или звуком в слышимом или ультразвуковом диапазоне, так и в радиодиапазоне различных длин волн, различных типов модуляции частотной, амплитудной или фазной, и т.п.
Надежность передачи информации может обеспечиваться одновременной параллельной передачей сигналов по разным типам каналов и контрольного сравнения результатов при исключении из анализа заведомо искаженных внезапно возникшими помехами, данные о которых получены путем мониторинга состояния окружающей среды.
Выполнение средств связи многоканальными и при этом последовательная и иерархическая двусторонняя передача позволяет на каждом этапе движения колонны проконтролировать прохождение команды или сообщения, а при отсутствии подтверждения провести дублирование сообщение по другому каналу связи и только после подтверждения получения продолжить штатную работу, при этом очевидно, что обратное сообщение может содержать дубликат команды и его сравнение с переданной командой, что позволяет повысить контроль содержания и снизить искажения, что должно повысить надежность контроля и управления. Иерархическая последовательная передача команд и сообщений последовательно от одного ТС к другому согласно порядку расположения БТС в колонне позволяет уменьшить мощность передатчиков при повышении надежности получения адресату не искаженных сообщений. При повторном непрохождении команды или сообщения водитель может вмешаться и отремонтировать средства связи или устранить другие неисправности. Также многоканальная иерархическая, последовательная двусторонняя передача команд управления и контроля позволяет исключить возможность утери управления над БТС, например, вследствие изменения условий прохождения предаваемого сигнала или команды, обусловленного изменением рельефа местности, началом или развитием магнитной бури и т.п. Например, в условиях горного рельефа связь в ультракоротком диапазоне радиоволн может быть затенена уступом скалы или резким поворотом трассы, переход на длинноволновый диапазон восстановит надежную связь. В особо сложных условиях рельефа могут быть установлены остронаправленные активные или пассивные стационарные ретрансляторы, позволяющие устранить влияние состояния магнитосферы, сложного рельефа местности, и т.п.
Во время движения по маршруту водитель ПТС вновь определяет каждый вновь выявленный им на этой трассе каждый участок маршрута с реально измененными реальными маршрутом и/или условиями движения, определяет и устанавливает локальные контрольные точки его начала и окончания, а также типа опасных или измененных маршрута и/или условий движения, перед прохождением которого каждое БТС автоматически по команде из ПТС изменяет маршрут и/или условия движения в маршрутной карте по заранее установленным критериям безопасного движения и после прохождения которых каждое БТС автоматически посылает сигнал о благополучном или аварийном преодолении опасного участка и его локальных контрольных точек, причем каждое БТС при каждом не выполнении действий в соответствии с требованиями маршрутной карты или при возникновении аварийной ситуации автоматически посылает на ПТС аварийный сигнал с автоматизированным определением и указанием причины. При этом водитель ПТС может изменить порядок нахождения БТС в колонне.
При движении колонны каждое БТС может автоматически поддерживать оптимальные по условиям безопасности расстояния между БТС и скорости их движения с использованием автоматического учета резко изменяющихся погодных условий, таких как появление снега, дождя, сильных порывов ветра и т.д.
Средства управления и контроля состояния БТС и локальных дорожных и погодных условий по маршруту движения каждого БТС в режиме реального времени включают в себя, по крайней мере, динамически управляемую адаптивную систему круиз-контроля, средства контроля расстояния до экипажных транспортных средств и ближайших БТС, определения состояния поверхности дороги
Контроль выполнения действий согласно маршрутной карте на каждом БТС происходит в режиме реального времени (online) и посылка аварийного сигнала с кодом или автоматическим анализом при каждом отклонении от действий согласно маршрутной карте позволяет повысить надежность и адекватность оценки реальной дорожной ситуации по управлению каждым БТС в колонне.
При возникновении нетипичной, или отличающейся какими-либо особенностями дорожной ситуации водитель ПТС каждый раз определяет каждый вновь измененный участок маршрута с локальными контрольными точками его начала и окончания с опасными или измененными условиями движения, соответственно оценивает любую степень нетипичности ситуации, типовые, обычные или нетипичные экстренные действия, а также предлагает для внесения в дорожные карты БТС действий, которые помогут преодолеть БТС эти не типичные дорожные ситуации.
Причем водитель ПТС определяет каждый вновь измененный участок маршрута, состояние которого оказывается за пределами прогнозного описания перед началом движения колонны, указанный участок маршрута указывается водителем с локальными контрольными точками его начала и окончания и с определением опасных или измененных условий движения, перед прохождением которого каждое БТС автоматически по команде из ПТС изменяет условия движения в маршрутной карте по заранее установленным критериям безопасного движения или при необходимости водитель задает вручную изменение указанных критериев и после прохождения которых каждое БТС автоматически посылает сигнал о благополучном или аварийном преодолении опасного участка и его локальных контрольных точек, причем БТС при каждом невыполнении действий в соответствии с требованиями маршрутной карты или при возникновении аварийной ситуации автоматически посылает на ПТС аварийный сигнал с автоматизированным определением и указанием причины. Такая последовательность действий позволяет повысить безопасность движения колонны в целом и отдельных БТС и конечно ПТС с водителем.
При возникновении аварийной или аварийно-опасной ситуации водитель ПТС может управлять любым из БТС с помощью выносного пульта аварийного ручного управления каждым БТС, каждый из которых может быть снабжен местом подключения и единым или специализированным выносным, или дистанционным беспроводным пультом управления.
Во время движения периодически осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС в центрах обработки и передачи данных с учетом интенсивности движения транспортных средств, состояния дорожной сети и погодных условий и передают их водителю ПТС с использованием средств дальней связи. Данные центры выполняют корректировку маршрута движения и комплекта маршрутных карт для всех ТС с использованием высокопроизводительных компьютеров. При перевозке воинских грузов функции таких центров могут выполнять стационарные комплексы автоматизированной системы материально-технического обеспечения войск (сил) в мирное время и мобильные комплексы - в военное время.
В случаях возникновения чрезвычайных ситуаций природного, техногенного и военного характера, а также в других опасных ситуациях в районе движения колонны, останавливают колонну водителем пилотного транспортного средства с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат (БЛА), содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с ПТС, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения БЛА к ПТС с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС.
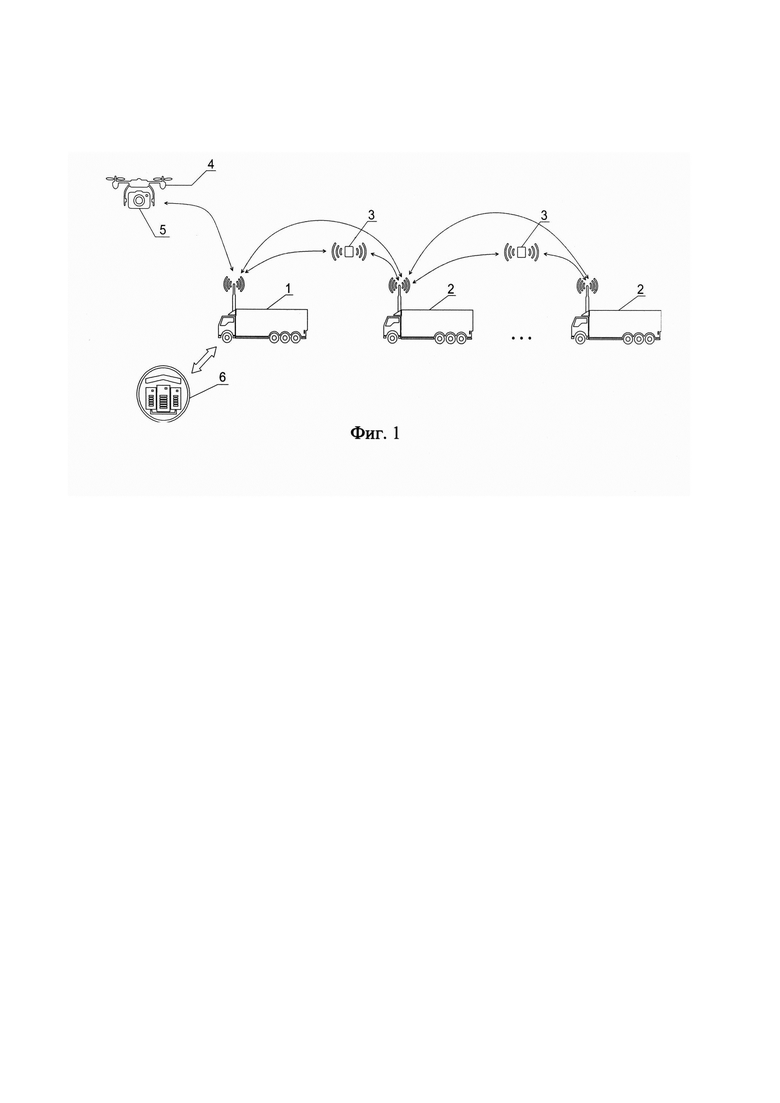
Реализация предлагаемого способа доставки грузов в места ведения боевых действий схематично представлена на Фиг. 1, где (1) - пилотируемое транспортное средство, (2) - беспилотное транспортное средство, (3) - ретрансляторы, (4) - беспилотный летательный аппарат, (5) - система видеонаблюдения, (6) - центр обработки и передачи данных.
При движении колонны, включающей пилотируемое транспортное средство 1 и беспилотные транспортные средства 2, управление ее движением осуществляют путем контроля и двусторонней передачи данных в режиме реального времени о маршруте от пилотируемого транспортного средства 1 к каждому беспилотному транспортному средству 2, о техническом состоянии каждого беспилотного транспортного средства 2 и о локальных дорожных и погодных условиях по маршруту его движения. При этом передачу ведут последовательно через средства связи и управления, выполненные многоканальными, иерархически подчиненными в соответствии с порядком движения пилотируемого транспортного средства 1 и беспилотных транспортных средств 2 в колонне. В особо сложных условиях обстановки передача данных осуществляется с использованием ретрансляторов 3. Во время движения колонны периодически осуществляют корректировку ее маршрута движения и комплекта маршрутных карт для всех ТС в центрах обработки и передачи данных 6 с учетом интенсивности движения транспортных средств, состояния дорожной сети и погодных условий и передают их водителю пилотного транспортного средства 1 с использованием средств дальней связи. В случае необходимости останавливают колонну водителем пилотного транспортного средства 1 с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат 4, содержащий систему видеонаблюдения 5 с собственной системой управления и дистанционной связи с пилотным транспортным средством 1, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения 5 беспилотного летательного аппарата 4 к пилотному транспортному средству 1 с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС.
Таким образом, предлагаемый способ позволяет обеспечить возможности по эффективной и надежной транспортировке грузов в различных условиях дорожной обстановки, особенно в условиях возникновения чрезвычайных ситуациях природного, техногенного и военного характера и ритмичной и стабильной транспортировке грузов в условиях низкой пропускной способности дорожной сети и с учетом ее технического состояния, что приводит к повышению эффективности, надежности, ритмичности и стабильности транспортного сообщения.
Источники информации
1. Патент США №US 2017106855. Способ прогностического управления интеллектуальной транспортной системой при управлении движением колонны [Текст] / заявитель FORD GLOBAL TECHNOLOGIES, LLC, опубл. 20.04.2017.
2. Патент США №№US 9511764 В2. Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны [Текст] / заявитель FORD GLOBAL TECHNOLOGIES, LLC, опубл. 06.12.2018.
3. Патент США №№US 9494944 В2. Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны [Текст] / заявитель SCANIA CV АВ, опубл. 15.11.2016.
4. Международная заявка №WO 2018043753 А1 Способ прогностического управления интеллектуальной транспортной системой при движении колонны в специфических условиях [Текст] / заявитель NABTESCO AUTOMOTIVE CORP, опубл. 08.03.2018.
5. Международная заявка №WO 2015047179 А1. Способ прогностического иерархического управления интеллектуальной транспортной системой при движении колонны на территориях с неустойчивым климатом [Текст] / заявитель SCANIA CV АВ, опубл. 02.04.2015.
6. Патент 2690143, Российская Федерация, МПК B60W 30/165, G07C 5/08. Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом [Текст] / Бузников СЕ. и др.; заявитель и патентообладатель Федеральное государственное унитарное предприятие «Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт «НАМИ» (ФГУП «НАМИ»). - №2018125208; заявл. 10.07.2018; опубл. 30.05.2019. Бюл. №16.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
Изобретение относится к способу управления интеллектуальной транспортной системой. Способ прогностического иерархического управления интеллектуальной транспортной системой содержит ведущее пилотное транспортное средство и одно ведомое автоматически управляемое беспилотное транспортное средство, где в режиме реального времени осуществляют контроль и двустороннюю передачу данных о маршруте от ПТС к каждому БТС о техническом состоянии каждого БТС и о локальных дорожных и погодных условиях по маршруту его движения. Водитель ПТС определяет каждый вновь выявленный им реально измененный участок маршрута с определением локальных контрольных точек его начала и окончания, а система управления движением колонны автоматически обеспечивает безопасное прохождение измененного маршрута всеми БТС, входящими в состав колонны. В случае необходимости останавливают колонну водителем ПТС с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения БЛА к ПТС с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС. Достигается повышение эффективности транспортного сообщения. 1 ил.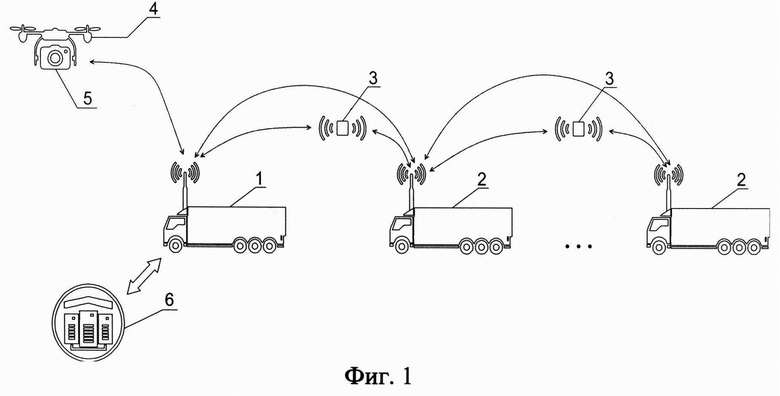
Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны, содержащей ведущее пилотное транспортное средство (ПТС) и, по крайней мере, одно ведомое автоматически управляемое беспилотное транспортное средство (БТС), включающий получение водителем ПТС задания на проводку колонны с тактико-техническими характеристиками всех транспортных средств (ТТХ ТС), ее составляющих, описания маршрута движения и комплекта маршрутных карт для всех ТС, как пилотного, так и беспилотных, адаптирование маршрутных карт под реальные ТТХ ТС, их прогностическую корректировку по реальному прогнозу технического состояния каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, контроль и двустороннюю передачу данных в режиме реального времени о маршруте от ПТС к каждому БТС и обратно о техническом состоянии каждого БТС и о локальных дорожных и погодных условиях по маршруту его движения, отчеты о результатах выполнения действий по движению, соответствующих требованиям маршрутной карты каждого БТС, при этом передачу ведут последовательно через средства связи и управления, выполненные многоканальными, иерархически подчиненными в соответствии с порядком расположения и движения ПТС и БТС в колонне, и обратно, причем водитель ПТС определяет каждый вновь выявленный им реально измененный участок маршрута с определением локальных контрольных точек его начала и окончания, а также типа опасных или измененных маршрута и/или условий движения, перед прохождением которого каждое БТС автоматически по команде из ПТС изменяет маршрут и/или условия движения в маршрутной карте по заранее установленным критериям безопасного движения и после прохождения которых автоматически посылает сигнал о благополучном или аварийном преодолении опасного участка и его локальных контрольных точек, а при каждом невыполнении действий в соответствии с требованиями маршрутной карты или при возникновении аварийной ситуации автоматически посылает на ПТС аварийный сигнал с автоматизированным определением и указанием причины, отличающийся тем, что во время движения периодически осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС в центрах обработки и передачи данных с учетом интенсивности движения транспортных средств, состояния дорожной сети и погодных условий и передают их водителю ПТС с использованием средств дальней связи, а в случае необходимости останавливают колонну водителем ПТС с использованием средств управления и связи, запускают им по направлению движения колонны беспилотный летательный аппарат (БЛА), содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с ПТС, автоматически посылают отчеты о состоянии дорожных условий в режиме реального времени от системы видеонаблюдения БЛА к ПТС с использованием дистанционной связи и по ним осуществляют корректировку маршрута движения и комплекта маршрутных карт для всех ТС.
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| EP 2965302 B1, 11.12.2019 | |||
| US 9511764 B2, 06.12.2016. | |||

