Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при вождении и к устройству помощи при вождении.
Уровень техники
[0002] PTL 1 описывает устройство автоматического вождения, которое управляет движением рассматриваемого транспортного средства таким образом, что когда управление движением для слияния (слияния с потоком автомобилей) определяется как невозможное, рассматриваемое транспортное средство останавливается в полосе движения, в которой рассматриваемое транспортное средство движется, к граничной линии между полосой движения и целевой полосой движения для слияния в местоположении слияния.
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2016-132421 A
Сущность изобретения
[0004] Когда рассматриваемое транспортное средство, движущееся согласно управлению автономным вождением, автономно останавливается в точке высокой сложности, в которой автономное вождение является затруднительным (например, в точке с высокой сложностью при автономном вождении), водитель рассматриваемого транспортного средства может ощущать дискомфорт вследствие приближения едущего сзади транспортного средства к рассматриваемому транспортному средству.
Например, когда автономно движущееся рассматриваемое транспортное средство вливается в перегруженную главную полосу движения, если управление автономным вождением определяет то, что невозможно вклиниваться перед другим транспортным средством на главной полосе движения, и затем автономно останавливает рассматриваемое транспортное средство, едущее сзади транспортное средство должно приближаться к рассматриваемому транспортному средству, что может вызывать дискомфорт у водителя рассматриваемого транспортного средства.
Задача настоящего изобретения заключается в том, чтобы уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства в точке высокой сложности, в которой автономное вождение является затруднительным.
[0005] Согласно одному аспекту настоящего изобретения, предусмотрен способ помощи при вождении, включающий в себя: извлечение точки высокой сложности, в которой автономное вождение является затруднительным по запланированному пути движения рассматриваемого транспортного средства; определение, в точке, расположенной на предварительно определенном расстоянии или более перед точкой высокой сложности, того, присутствует или нет едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства, в пределах предварительно определенного диапазона от рассматриваемого транспортного средства; и направление переключения состояния движения рассматриваемого транспортного средства с автономного вождения на вождение вручную, когда едущее сзади транспортное средство присутствует в пределах предварительно определенного диапазона от рассматриваемого транспортного средства.
[0006] Задача и преимущества изобретения могут реализовываться и достигаться посредством элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как вышеприведенное общее описание, так и нижеприведенное подробное описание являются примерными и пояснительными, а не ограничивающими изобретение.
Краткое описание чертежей
[0007] Фиг. 1 является схемой, иллюстрирующей схематичный конструктивный пример устройства помощи при вождении варианта осуществления;
Фиг. 2 является схемой, иллюстрирующей первый пример точки высокой сложности;
Фиг. 3 является блок-схемой, иллюстрирующей один пример функциональной структуры контроллера, включенного на фиг. 1;
Фиг. 4A является схемой, иллюстрирующей первый пример зоны слияния, которая представляет собой точку высокой сложности;
Фиг. 4B является схемой, иллюстрирующей один пример зоны слияния, которая не представляет собой точку высокой сложности;
Фиг. 5A является схемой, иллюстрирующей второй пример точки высокой сложности;
Фиг. 5B является схемой, иллюстрирующей второй пример зоны слияния, которая представляет собой точку высокой сложности;
Фиг. 6 является схемой, иллюстрирующей один пример точки A, в которой едущее сзади транспортное средство является распознаваемым;
Фиг. 7 является схемой, иллюстрирующей один пример операции в случае, если отсутствует едущее сзади транспортное средство, и главная полоса движения перегружена;
Фиг. 8 является схемой, иллюстрирующей один пример случая, в котором отсутствует едущее сзади транспортное средство, и главная полоса движения не перегружена; и
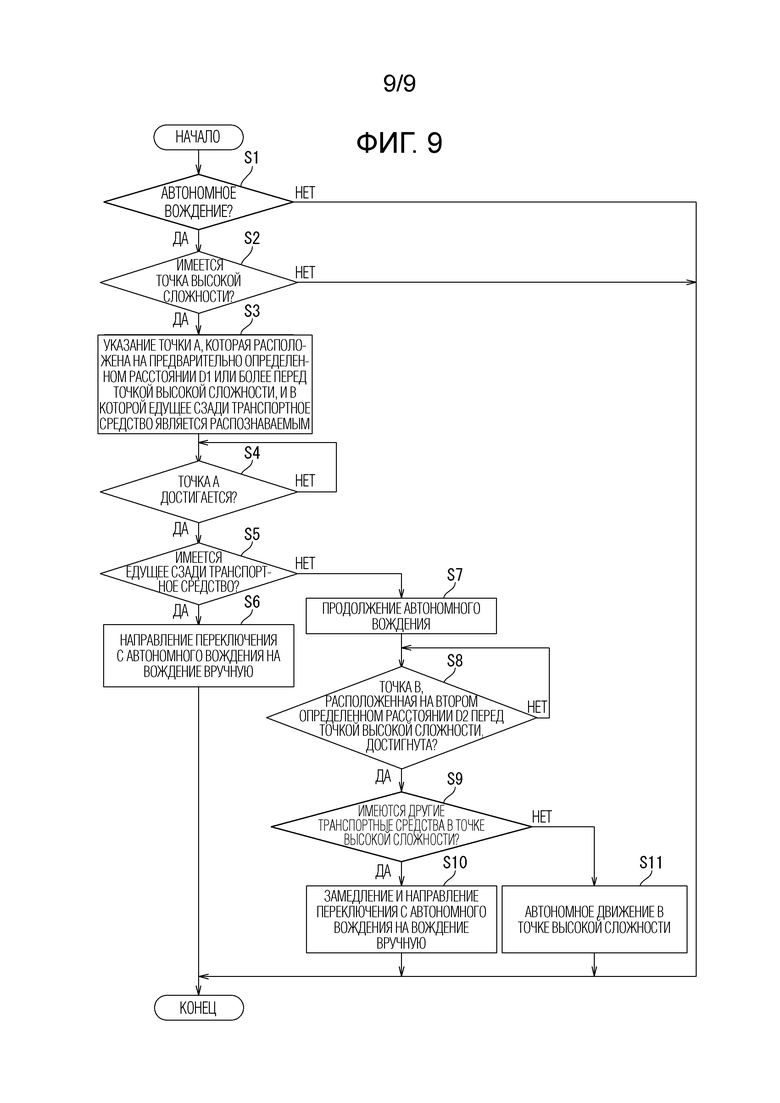
Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей способ помощи при вождении варианта осуществления.
Подробное описание вариантов осуществления
[0008] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Структура
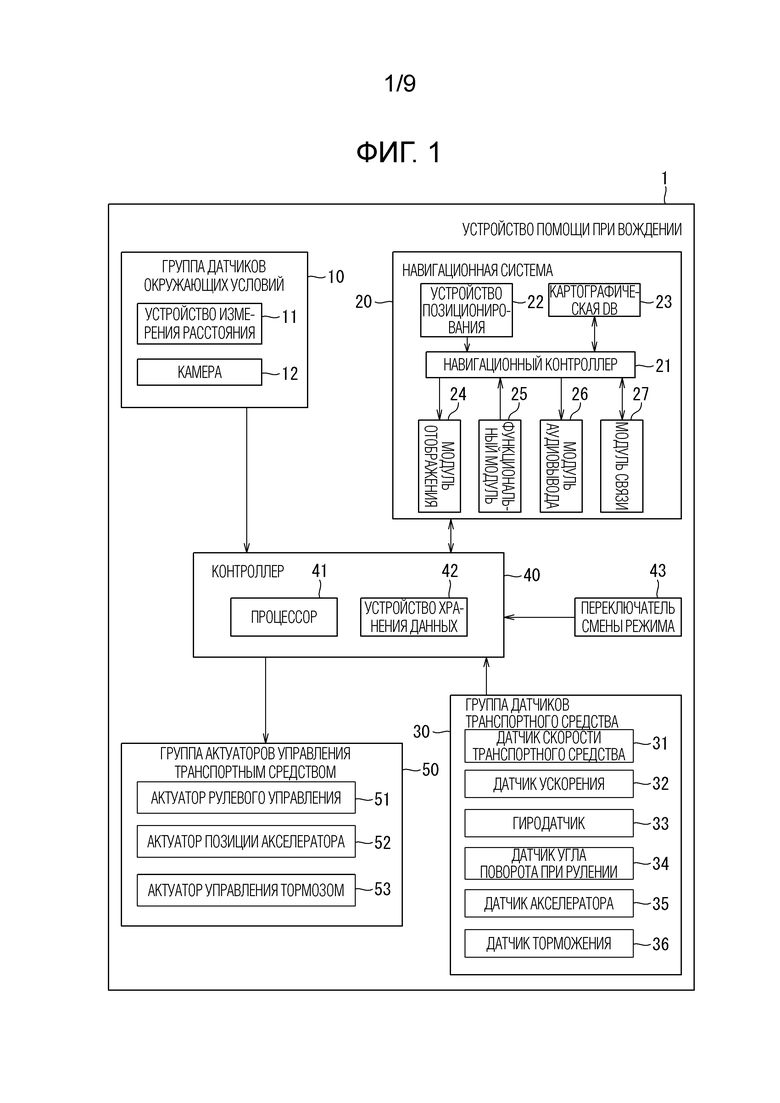
Следует обратиться к фиг. 1. Устройство 1 помощи при вождении выполняет управление помощью при движении, на основе окружения движения вокруг транспортного средства (в дальнейшем называемого "рассматриваемым транспортным средством"), содержащего устройство 1 помощи при вождении, чтобы автономно управлять и останавливать рассматриваемое транспортное средство, и выполняет управление автономным вождением, чтобы осуществлять автономное вождение рассматриваемого транспортного средства без вмешательства водителя.
Устройство 1 помощи при вождении включает в себя группу 10 датчиков окружающих условий, навигационную систему 20, группу 30 датчиков транспортного средства, контроллер 40, переключатель 43 смены режима и группу 50 актуаторов (исполнительных механизмов) управления транспортным средством.
[0009] Группа 10 датчиков окружающих условий представляет собой группу датчиков, выполненную с возможностью обнаруживать окружающие условия рассматриваемого транспортного средства, например, объекты около рассматриваемого транспортного средства. Группа 10 датчиков окружающих условий может включать в себя устройство 11 измерения расстояния и камеру 12. Устройство 11 измерения расстояния и камера 12 обнаруживают окружающие условия, такие как объекты, присутствующие около рассматриваемого транспортного средства, относительные позиции между транспортным средством и объектами и расстояния между транспортным средством и объектами.
Устройство 11 измерения расстояния, например, может представлять собой лазерный дальномер (LRF) или радар.
[0010] Камера 12, например, может представлять собой стереокамеру. Камера 12 может представлять собой монокулярную камеру, в которой идентичный объект может фотографироваться посредством монокулярной камеры во множестве точек обзора, с тем чтобы вычислять расстояние до объекта.
Устройство 11 измерения расстояния и камера 12 выводят информацию окружающих условий, которая представляет собой информацию обнаруженных окружающих условий, в контроллер 40.
[0011] Навигационная система 20 распознает текущую позицию рассматриваемого транспортного средства и дорожную картографическую информацию в текущей позиции. Навигационная система 20 задает путь движения до пункта назначения, введенного пользователем транспортного средства, и предоставляет пользователю навигацию на основе инструкций по пути согласно пути движения. Кроме того, навигационная система 20 выводит информацию заданного пути движения в контроллер 40. Когда состояние движения рассматриваемого транспортного средства представляет собой режим автономного вождения, контроллер 40 осуществляет автономное вождение рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется по пути движения, заданному посредством навигационной системы 20.
[0012] Навигационная система 20 включает в себя навигационный контроллер 21, устройство 22 позиционирования, картографическую базу 23 данных, модуль 24 отображения, функциональный модуль 25, модуль 26 аудиовывода и модуль 27 связи. Следует отметить, что, на фиг. 1, картографическая база данных представляется как картографическая DB.
Навигационный контроллер 21 представляет собой электронный модуль управления, выполненный с возможностью управлять операцией обработки информации навигационной системы 20. Навигационный контроллер 21 включает в себя процессор и его периферийные компоненты.
Процессор, например, может представлять собой центральный процессор (CPU) или микропроцессор (MPU).
[0013] Периферийные компоненты включают в себя устройство хранения данных и т.п. Устройство 16 хранения данных может включать в себя любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных. Устройство хранения данных может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), используемые в качестве первичного устройства хранения данных.
Устройство 22 позиционирования измеряет текущую позицию рассматриваемого транспортного средства. Устройство 22 позиционирования, например, может представлять собой приемное устройство на основе глобальной системы позиционирования (GPS). Дополнительно, устройство 22 позиционирования может измерять текущую позицию рассматриваемого транспортного средства на основе спутникового сигнала другой спутниковой системы позиционирования, такой как глобальная навигационная спутниковая система (GLONASS). Альтернативно, устройство 22 позиционирования может представлять собой инерциальное навигационное устройство.
[0014] Картографическая база 23 данных сохраняет дорожные картографические данные. Дорожные картографические данные включают в себя информацию относительно типов линий дорожной разметки, форм дорог, уклонов, числа полос движения, разрешенных скоростей (ограничений скорости), присутствия или отсутствия скрещений дорог и т.п. Типы линий дорожной разметки включают в себя, например, обычные дороги и шоссе.
В навигационной системе 20, модуль 24 отображения выводит различные фрагменты визуальной информации. Например, модуль 24 отображения может отображать экран карты около рассматриваемого транспортного средства и инструкции для навигации по рекомендуемому пути.
[0015] В навигационной системе 20, функциональный модуль 25 принимает операцию пользователя транспортного средства. Функциональный модуль 25, например, может представлять собой кнопку, круговую ручку регулировки, ползунок и т.п. либо может представлять собой сенсорную панель, предоставленную на модуле 24 отображения. Например, функциональный модуль 25 может принимать операцию ввода пункта назначения и операцию для переключения экрана отображения модуля 24 отображения пользователем транспортного средства.
Модуль 26 аудиовывода выводит различные фрагменты аудиоинформации в навигационной системе 20. Модуль 26 аудиовывода может выводить инструкции для навигации относительно вождения на основе заданного пути движения и дорожную информацию навигации на основе инструкций на основе дорожных картографических данных около рассматриваемого транспортного средства.
Модуль 27 связи осуществляет беспроводную связь с устройством связи за пределами рассматриваемого транспортного средства. Система связи посредством модуля 27 связи, например, может представлять собой беспроводную связь посредством общедоступной мобильной телефонной сети, связи между транспортными средствами, связи между транспортным средством и дорожной инфраструктурой или спутниковой связи.
[0016] Группа 30 датчиков транспортного средства включает в себя датчики, выполненные с возможностью обнаруживать состояние движения транспортного средства, и датчики, выполненные с возможностью обнаруживать операцию вождения, выполняемую водителем.
Датчики, выполненные с возможностью обнаруживать состояние движения транспортного средства, включают в себя датчик 31 скорости транспортного средства, датчик 32 ускорения и гиродатчик 33.
Датчики, выполненные с возможностью обнаруживать операцию вождения, включают в себя датчик 34 угла поворота при рулении, датчик 35 акселератора и датчик 36 торможения.
[0017] Датчик 31 скорости транспортного средства определяет скорость вращения колес рассматриваемого транспортного средства и вычисляет скорость рассматриваемого транспортного средства на основе скорости вращения колес.
Датчик 32 ускорения определяет ускорение в продольном направлении рассматриваемого транспортного средства, ускорение в направлении ширины транспортного средства для него и ускорение в вертикальном направлении для него.
Гиродатчик 33 определяет угловую скорость угла вращения рассматриваемого транспортного средства вокруг трех осей, включающих в себя ось крена, ось наклона в продольном направлении и ось наклона относительно вертикальной оси.
[0018] Датчик 34 угла поворота при рулении определяет текущий угол поворота при рулении, который представляет собой текущий угол вращения (рабочую величину руления) руля, служащего в качестве рабочего элемента руления.
Датчик 35 акселератора обнаруживает позицию акселератора транспортного средства. Например, датчик 35 акселератора определяет, в качестве позиции акселератора, величину нажатия педали акселератора транспортного средства.
Датчик 36 торможения определяет величину операции торможения водителем. Например, датчик 36 торможения определяет, в качестве величины операции торможения, величину нажатия педали тормоза транспортного средства.
Информация относительно скорости, ускорения, угловой скорости, угла поворота при рулении, позиции акселератора и величины операции торможения рассматриваемого транспортного средства, обнаруженная посредством соответствующих датчиков группы 30 датчиков транспортного средства, совместно называется "информацией касательно транспортного средства". Группа 30 датчиков транспортного средства выводит информацию касательно транспортного средства в контроллер 40.
[0019] Контроллер 40 представляет собой электронный модуль управления, выполненный с возможностью выполнять управление вождением рассматриваемого транспортного средства. Контроллер 40 включает в себя процессор 41 и периферийные компоненты, такие как устройство 42 хранения данных. Процессор 41, например, может представлять собой CPU или MPU.
Устройство 42 хранения данных может включать в себя любое из полупроводникового устройства хранения данных, магнитного устройства хранения данных и оптического устройства хранения данных. Устройство 42 хранения данных может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ROM и RAM, используемые в качестве первичного устройства хранения данных.
Следует отметить, что контроллер 40 может быть реализован посредством функциональной логической схемы, заданной в полупроводниковой интегральной схеме общего назначения. Например, схема 40 управления транспортного средства может иметь программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA) и т.п.
[0020] В режиме автономного вождения, в котором выполняется управление автономным вождением рассматриваемого транспортного средства, контроллер 40 формирует траекторию движения, которая инструктирует рассматриваемому транспортному средству двигаться по пути движения, заданному посредством навигационной системы 20, на основе информации окружающих условий, вводимой из группы 10 датчиков окружающих условий, и информации касательно транспортного средства, вводимой из группы 30 датчиков транспортного средства.
Контроллер 40 приводит в действие группу 50 актуаторов управления транспортным средством таким образом, что рассматриваемое транспортное средство движется по сформированной траектории движения, за счет этого позволяя транспортному средству автономно двигаться.
[0021] Группа 50 актуаторов управления транспортным средством управляет рулем, позицией акселератора и тормозным устройством транспортного средства в ответ на управляющий сигнал из контроллера 40, чтобы инструктировать возникать поведению транспортного средства для транспортного средства. Группа 50 актуаторов управления транспортным средством включает в себя актуатор 51 рулевого управления, актуатор 52 позиции акселератора и актуатор 53 управления тормозом.
Актуатор 51 рулевого управления управляет направлением руления и величиной руления системы рулевого управления транспортного средства.
Актуатор 52 позиции акселератора управляет позицией акселератора транспортного средства.
Актуатор 53 управления тормозом управляет операцией торможения тормозного устройства транспортного средства.
[0022] В режиме вождения вручную, контроллер 40 приводит в действие группу 50 актуаторов управления транспортным средством, например, в ответ на угол поворота при рулении, позицию акселератора и величину операции торможения, обнаруженные посредством группы 30 датчиков транспортного средства, чтобы инструктировать возникать поведению транспортного средства в соответствии с операцией водителя.
За счет операции переключателя 43 смены режима, водитель может переключать состояние движения рассматриваемого транспортного средства между режимом автономного вождения и режимом вождения вручную.
[0023] Контроллер 40 переключает состояние движения рассматриваемого транспортного средства между режимом автономного вождения и режимом вождения вручную в ответ на операцию переключателя 43 смены режима водителем.
Помимо этого, когда любое из руля, педали акселератора и педали тормоза управляется водителем во время автономного вождения, т.е. когда возникает перехват управления, контроллер 40 переключает состояние движения рассматриваемого транспортного средства с режима автономного вождения на режим вождения вручную.
[0024] Кроме того, когда имеется точка, в которой автономное вождение является затруднительным впереди рассматриваемого транспортного средства по пути, по которому планирует двигаться рассматриваемое транспортное средство (например, по пути движения для автономного вождения), и также имеется едущее сзади транспортное средство позади в полосе движения рассматриваемого транспортного средства, контроллер 40 направляет переключение состояния движения рассматриваемого транспортного средства с режима автономного вождения на режим вождения вручную.
В дальнейшем в этом документе, путь, по которому планирует двигаться рассматриваемое транспортное средство, может упоминаться как "запланированный путь движения". Дополнительно, точка, в которой автономное вождение рассматриваемого транспортного средства является затруднительным (например, точка, в которой рассматриваемое транспортное средство испытывает серьезные затруднения при автономном вождении), упоминается как "точка высокой сложности".
Точка высокой сложности, например, может представлять собой точку, в которой, в зависимости от условий движения, таких как степень затора, увеличивается сложность автономного вождения рассматриваемого транспортного средства.
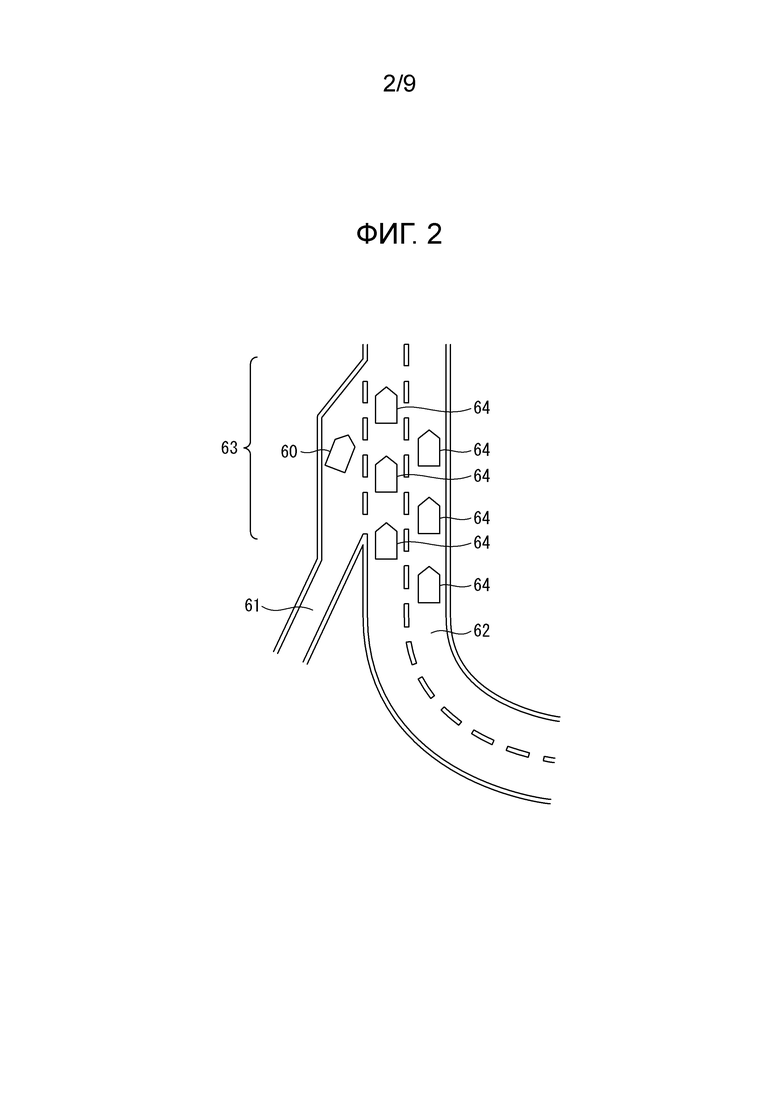
Например, точка высокой сложности включает в себя точку, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения. Например, точка высокой сложности включает в себя зону 63 слияния, в которой полоса 61 движения для слияния, которая представляет собой полосу движения рассматриваемого транспортного средства 60, сливается с целевой полосой 62 движения для слияния в местоположении слияния, в котором множество дорог сливаются между собой, как проиллюстрировано на фиг. 2. В дальнейшем в этом документе, целевая полоса движения для слияния упоминается как "главная полоса движения" в настоящем описании изобретения.
[0025] Когда рассматриваемое транспортное средство 60 собирается въезжать на главную полосу 62 движения в заторе, как проиллюстрировано на фиг. 2, имеются другие транспортные средства 64, которые представляют собой помехи для въезда рассматриваемого транспортного средства 60, на главной полосе 62 движения в зоне 63 слияния. Вследствие затора, множество других транспортных средств 64 последовательно и непрерывно обнаруживаются на главной полосе 62 движения, что затрудняет смену полосы движения на главную полосу 62 движения при автономном вождении.
В этом случае, когда рассматриваемое транспортное средство 60 останавливается посредством автономного вождения, едущее сзади транспортное средство, движущееся в полосе 61 движения, приближается к рассматриваемому транспортному средству 60, что может вызывать дискомфорт у водителя рассматриваемого транспортного средства.
[0026] Таким образом, когда имеется точка высокой сложности впереди рассматриваемого транспортного средства 60 на запланированном пути движения, и также едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства 60 (т.е. в полосе 61 движения для слияния), присутствует в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, контроллер 40 направляет переключение с автономного вождения на вождение вручную перед точкой высокой сложности. Это обеспечивает возможность водителю осуществлять вождение вручную транспортного средства в точке высокой сложности, так что может предотвращаться то, что рассматриваемое транспортное средство останавливается посредством автономного вождения в точке высокой сложности, а затем к нему приближается едущее сзади транспортное средство.
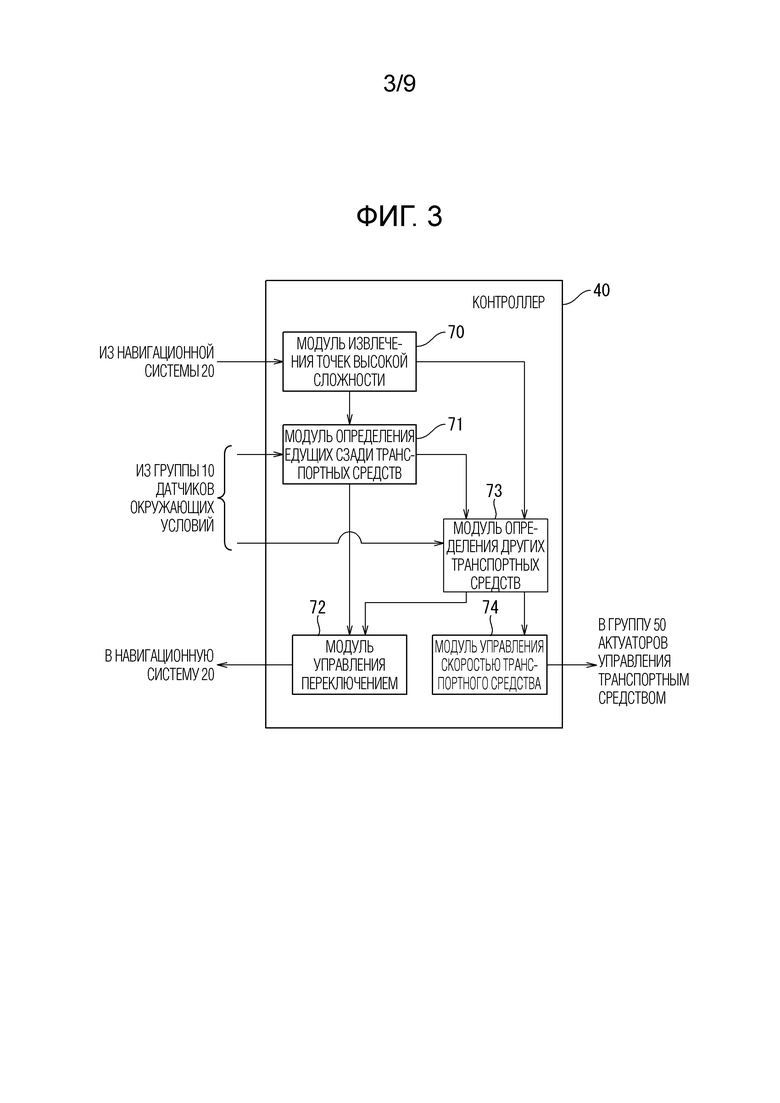
[0027] Далее приводится описание функциональной структуры контроллера 40. Следует обратиться к фиг. 3. Контроллер 40 включает в себя модуль 70 извлечения точек высокой сложности, модуль 71 определения едущих сзади транспортных средств, модуль 72 управления переключением, модуль 73 определения других транспортных средств и модуль 74 управления скоростью транспортного средства.
Функции модуля 70 извлечения точек высокой сложности, модуля 71 определения едущих сзади транспортных средств, модуля 72 управления переключением, модуля 73 определения других транспортных средств и модуля 74 управления скоростью транспортного средства могут быть реализованы посредством инструктирования процессору 41 контроллера 40 выполнять компьютерную программу, сохраненную в устройстве 42 хранения данных.
[0028] Модуль 70 извлечения точек высокой сложности получает, из навигационной системы 20, дорожные картографические данные соответствующих точек на запланированном пути движения, заданном посредством навигационной системы 20. Модуль 70 извлечения точек высокой сложности извлекает точку высокой сложности, присутствующую впереди рассматриваемого транспортного средства 60 на запланированном пути движения, на основе дорожных картографических данных, полученных из навигационной системы 20.
Например, модуль 70 извлечения точек высокой сложности может извлекать, в качестве точки высокой сложности, точку, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения.
Например, точка, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения, может включать в себя точку, имеющую форму дороги, в которой множество полос движения пересекаются друг с другом, такую как перекресток. Например, перекресток может включать в себя развязку, T-перекресток и т.п.
[0029] Помимо этого, например, точка, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения, может включать в себя точку, имеющую форму дороги, в которой множество полос движения сливаются между собой. Модуль 70 извлечения точек высокой сложности может извлекать, например, зону 63 слияния, проиллюстрированную на фиг. 4A, в качестве точки, имеющей форму дороги, в которой множество полос движения сливаются между собой.
Зона 63 слияния представляет собой зону слияния, в которой слияние с главной полосой 62 движения заключает в себе смену полосы движения с полосы 61 движения для слияния на главную полосу 62 движения.
[0030] Из числа местоположений, в которых множество полос движения сливаются между собой, имеются местоположения, в которых смена полосы движения не требуется в точке слияния, аналогично точке слияния, проиллюстрированной на фиг. 4B. Модуль 70 извлечения точек высокой сложности может исключать точку слияния, проиллюстрированную на фиг. 4B, из точек высокой сложности.
Следует обратиться к фиг. 4A. Чем короче период времени, в течение которого рассматриваемое транспортное средство 60 может оставаться в зоне от начальной точки 80 зоны 63 слияния до ее конечной точки 81, тем меньше вероятность выполнять смену полосы движения на главную полосу 62 движения, в результате чего слияние с главной полосой 62 движения становится более трудным.
[0031] Таким образом, например, модуль 70 извлечения точек высокой сложности может извлекать зону 63 слияния в качестве точки высокой сложности, когда расстояние L от начальной точки 80 зоны 63 слияния до ее конечной точки 81 ниже порогового значения.
Пороговое значение может задаваться равным, например, расстоянию, при котором слияние может пробоваться фактически только однократно из начальной точки 80. Альтернативно, пороговое значение может задаваться равным расстоянию, при котором невозможно двигаться в течение трех секунд или более после выдачи сигнала поворота в зоне 63 слияния.
[0032] Дополнительно, например, модуль 70 извлечения точек высокой сложности прогнозирует скорость рассматриваемого транспортного средства 60 в зоне 63 слияния и, на основе прогнозированной скорости и расстояния L, прогнозирует время движения рассматриваемого транспортного средства 60 от начальной точки 80 до конечной точки 81. Когда время движения ниже порогового значения, зона 63 слияния может извлекаться в качестве точки высокой сложности. Модуль 70 извлечения точек высокой сложности может прогнозировать скорость рассматриваемого транспортного средства 60 в зоне 63 слияния на основе допустимого ограничения скорости в зоне 63 слияния или на основе текущей скорости рассматриваемого транспортного средства 60.
[0033] Следует обратиться к фиг. 5A. Например, модуль 70 извлечения точек высокой сложности может извлекать, в качестве точки высокой сложности, точку, в которой запланированный путь движения, заданный посредством навигационной системы 20, требует смены полосы движения. Путь 84 движения, проиллюстрированный на фиг. 5A, поступает во множество полос 62 движения из полосы 61 движения, пересекает множество полос 62 движения и затем переходит в полосу 85 движения. Вследствие этого, путь 84 движения требует смены полосы движения в зоне, указываемой посредством ссылки с номером 86.
[0034] Помимо этого, модуль 70 извлечения точек высокой сложности также может извлекать, в качестве точки высокой сложности, не только зону 63 слияния, в которой полосы 61 и 62 движения для слияния разделяются посредством разделительной дорожной линии 82 (пунктирной линии), как проиллюстрировано на фиг. 4A, но также и зону слияния, в которой множество полос движения для слияния не разделяются посредством разделительной дорожной линии.
Зона 89 слияния по фиг. 5B представляет собой пример зоны слияния, в которой полосы 87 и 88 движения для слияния не разделяются посредством разделительной дорожной линии.
Кроме того, модуль 70 извлечения точек высокой сложности может извлекать, в качестве точки высокой сложности, зону без полос движения, имеющую ширину, соответствующую множеству полос движения. Один пример такой зоны без полос движения представляет собой зону без полос движения перед пунктом взимания платы за проезд платной дороги.
[0035] Следует обратиться к фиг. 3. Когда рассматриваемое транспортное средство 60 приближается к точке на предварительно определенном расстоянии или более перед точкой высокой сложности, модуль 71 определения едущих сзади транспортных средств определяет то, присутствует или нет едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60 (т.е. определяет то, присутствует или нет едущее сзади транспортное средство 83 в пределах предварительно определенного диапазона позади рассматриваемого транспортного средства в полосе 61 движения рассматриваемого транспортного средства).
Например, в примере зоны 63 слияния, проиллюстрированной на фиг. 4A, когда рассматриваемое транспортное средство 60 достигает точки A, расположенной на первом предварительно определенном расстоянии D1 или более перед начальной точкой 80 зоны 63 слияния, присутствие или отсутствие едущего сзади транспортного средства 83 подтверждается.
Первое предварительно определенное расстояние D1 может задаваться равным длине в диапазоне, например, от 100 м до 300 м.
[0036] Модуль 71 определения едущих сзади транспортных средств определяет то, присутствует или нет едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, на основе результата обнаружения относительно объекта позади рассматриваемого транспортного средства 60 посредством устройства 11 измерения расстояния и камеры 12 группы 10 датчиков окружающих условий.
Предварительно определенный диапазон для определения присутствия или отсутствия едущего сзади транспортного средства 83, например, может представлять собой диапазон, в котором расстояние между транспортными средствами между рассматриваемым транспортным средством 60 и едущим сзади транспортным средством 83 ниже предварительно определенного расстояния.
[0037] Предварительно определенный диапазон для определения присутствия или отсутствия едущего сзади транспортного средства 83, например, может представлять собой диапазон, в котором время между транспортными средствами или время до столкновения (TTC) между рассматриваемым транспортным средством 60 и едущим сзади транспортным средством 83 ниже предварительно определенного времени движения.
Дополнительно, модуль 71 определения едущих сзади транспортных средств может определять присутствие или отсутствие едущего сзади транспортного средства 83 на основе связи между транспортными средствами или связи между транспортным средством и дорожной инфраструктурой посредством модуля 27 связи навигационной системы 20, в дополнение или вместо устройства 11 измерения расстояния и камеры 12.
[0038] Следует отметить, что может быть затруднительным распознавать едущее сзади транспортное средство 83 в точке на первом предварительно определенном расстоянии D1 перед точкой высокой сложности.
Например, как проиллюстрировано на фиг. 6, когда точка Ax на первом предварительно определенном расстоянии D1 перед точкой высокой сложности расположена между искривленной зоной полосы 61 движения и точкой высокой сложности, видимость позади рассматриваемого транспортного средства в точке Ax уменьшается, что может затруднять для устройства 11 измерения расстояния и камеры 12 обнаружение едущего сзади транспортного средства 83.
[0039] Вследствие этого, на основе дорожных картографических данных, полученных из навигационной системы 20, модуль 71 определения едущих сзади транспортных средств может указывать точку A, которая расположена на первом предварительно определенном расстоянии D1 или более перед точкой высокой сложности, и в которой едущее сзади транспортное средство 83 является распознаваемым.
В примере по фиг. 6, едущее сзади транспортное средство 83 в пределах предварительно определенного диапазона позади рассматриваемого транспортного средства 60 в полосе 61 движения рассматриваемого транспортного средства 60 может распознаваться в точке A, которая расположена на первом предварительно определенном расстоянии D1+α перед точкой высокой сложности.
Модуль 71 определения едущих сзади транспортных средств может определять то, присутствует или нет едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, в точке A, расположенной на первом предварительно определенном расстоянии D1+α перед точкой высокой сложности, т.е. в точке A, которая расположена на первом предварительно определенном расстоянии D1 или более перед точкой высокой сложности, и в которой едущее сзади транспортное средство 83 в пределах предварительно определенного диапазона позади рассматриваемого транспортного средства 60 в полосе 61 движения является распознаваемым.
[0040] Следует обратиться к фиг. 3. Модуль 71 определения едущих сзади транспортных средств выводит результат определения относительно присутствия или отсутствия едущего сзади транспортного средства 83 в модуль 72 управления переключением и модуль 73 определения других транспортных средств.
Когда едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, присутствует в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, модуль 72 управления переключением направляет переключение состояния движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную.
Например, модуль 72 управления переключением может выводить, из модуля 26 аудиовывода навигационной системы 20, сообщение с аудиоинструкциями по навигации для указания водителю переключать состояние движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную посредством операции переключателя 43 смены режима.
[0041] Альтернативно, например, модуль 72 управления переключением может выводить, из модуля 26 аудиовывода, сообщение с аудиоинструкциями по навигации для указания водителю переключать состояние движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную посредством операции любого из руля, педали акселератора или педали тормоза.
Альтернативно, например, модуль 72 управления переключением может отображать, на модуле 24 отображения навигационной системы 20, сообщение с видеоинструкциями по навигации для указания водителю переключать состояние движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную посредством операции переключателя 43 смены режима.
Альтернативно, например, модуль 72 управления переключением может отображать, на модуле 24 отображения, сообщение с видеоинструкциями по навигации для указания водителю переключать состояние движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную посредством операции любого из руля, педали акселератора или педали тормоза.
[0042] Альтернативно, модуль 72 управления переключением может выводить из модуля 26 аудиовывода или модуля 24 отображения, сообщение с аудиоинструкциями по навигации или сообщение с видеоинструкциями по навигации для уведомления водителя в отношении того, что состояние движения рассматриваемого транспортного средства 60 должно автономно переключаться с режима автономного вождения на режим вождения вручную.
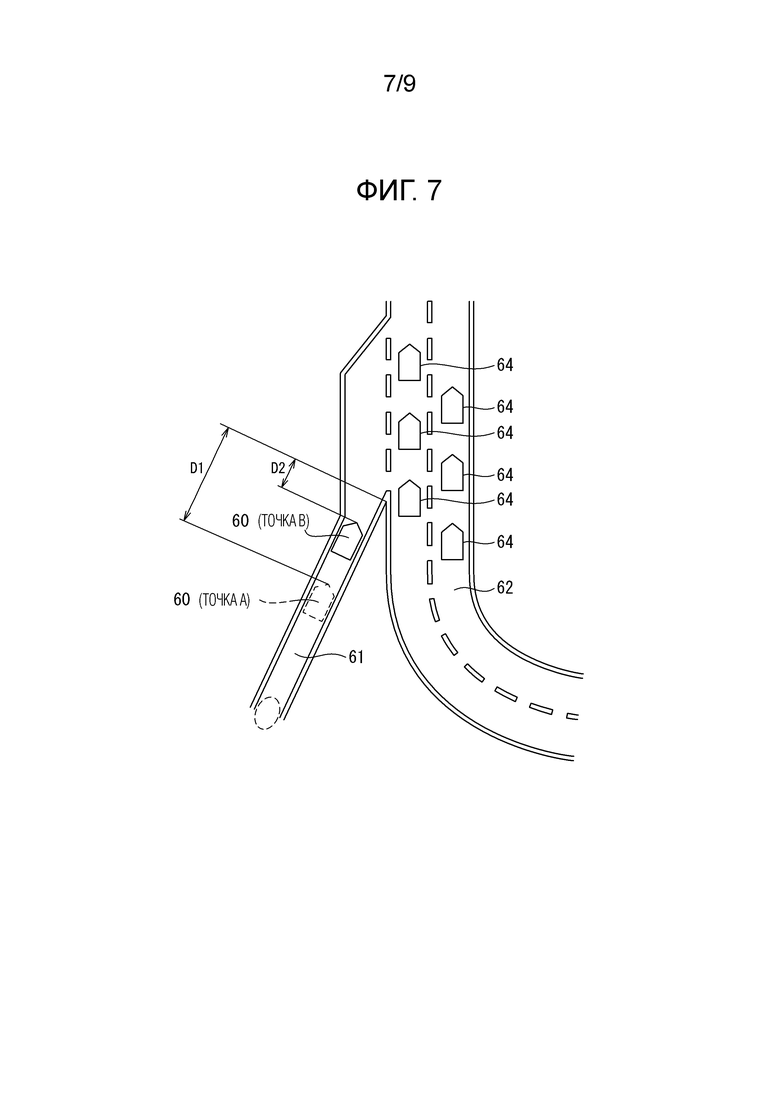
[0043] Когда едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, не присутствует в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, модуль 72 управления переключением продолжает автономное вождение до точки B, расположенной на втором предварительно определенном расстоянии D2 перед точкой высокой сложности, как проиллюстрировано на фиг. 7.
Точка B представляет собой точку, в которой рассматриваемое транспортное средство 60 может определять то, присутствуют или нет другие транспортные средства, 64, представляющие собой помеху для движения рассматриваемого транспортного средства 60, в точке высокой сложности, и то, меньше второе предварительно определенное расстояние D2 или нет первого предварительно определенного расстояния D1.
Следует отметить, что модуль 74 управления скоростью транспортного средства не должен замедлять рассматриваемое транспортное средство 60 в зоне от точки A до точки B.
[0044] Следует обратиться к фиг. 3. Когда рассматриваемое транспортное средство 60 достигает точки B, модуль 73 определения других транспортных средств определяет то, присутствуют или нет другие транспортные средства 64, представляющие собой помеху для движения рассматриваемого транспортного средства 60, в точке высокой сложности, на основе результата обнаружения относительно объектов около рассматриваемого транспортного средства 60 посредством устройства 11 измерения расстояния и камеры 12 группы 10 датчиков окружающих условий. Присутствие или отсутствие другого транспортного средства 64 может определяться на основе связи между транспортными средствами или связи между транспортным средством и дорожной инфраструктурой посредством модуля 27 связи, в дополнение или вместо устройства 11 измерения расстояния и камеры 12.
[0045] Например, когда главная полоса 62 движения находится в заторе, как проиллюстрировано на фиг. 7, и любое из других транспортных средств 64 на главной полосе 62 движения представляет собой помеху для въезда рассматриваемого транспортного средства 60 на главную полосу 62 движения, модуль 73 определения других транспортных средств определяет то, что другое транспортное средство 64, представляющее собой помеху для движения рассматриваемого транспортного средства 60, присутствует в точке высокой сложности.
С другой стороны, когда главная полоса 62 движения не находится в заторе, как проиллюстрировано на фиг. 8, и ни одно из других транспортных средств 64 на главной полосе 62 движения не представляет собой помеху для въезда рассматриваемого транспортного средства 60 на главную полосу 62 движения, модуль 73 определения других транспортных средств определяет то, что отсутствует другое транспортное средство 64, представляющее собой помеху для движения рассматриваемого транспортного средства 60, в точке высокой сложности.
Следует обратиться к фиг. 3. Модуль 73 определения других транспортных средств выводит результат определения в модуль 72 управления переключением и модуль 74 управления скоростью транспортного средства.
[0046] Когда отсутствует другое транспортное средство 64, представляющее собой помеху для движения рассматриваемого транспортного средства 60, в точке высокой сложности, модуль 72 управления переключением продолжает автономное вождение и инструктирует рассматриваемому транспортному средству 60 автономно двигаться в точке высокой сложности. Например, рассматриваемому транспортному средству инструктируется сменять полосу движения с полосы 61 движения (полосы движения для слияния) на главную полосу 62 движения посредством автономного вождения.
Когда имеется другое транспортное средство 64, представляющее собой помеху для движения рассматриваемого транспортного средства 60, в точке высокой сложности, водитель инструктирует рассматриваемому транспортному средству 60 вручную двигаться в точке высокой сложности.
[0047] В этом случае, модуль 74 управления скоростью транспортного средства замедляет рассматриваемое транспортное средство 60. Во время замедления рассматриваемого транспортного средства 60 посредством модуля 74 управления скоростью транспортного средства, модуль 72 управления переключением направляет переключение с режима автономного вождения на режим вождения вручную. Таким образом, контроллер 40 направляет переключение с режима автономного вождения на режим вождения вручную при замедлении рассматриваемого транспортного средства 60.
[0048] Например, модуль 72 управления переключением может выводить сообщение с инструкциями по навигации для указания водителю переключать состояние движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную через операцию водителем.
Альтернативно, модуль 72 управления переключением может выводить сообщение с инструкциями по навигации для уведомления водителя в отношении того, что состояние движения рассматриваемого транспортного средства 60 должно автономно переключаться с режима автономного вождения на режим вождения вручную.
[0049] Работа
Далее описывается один пример работы устройства 1 помощи при вождении. Следует обратиться к фиг. 9.
На этапе S1, модуль 70 извлечения точек высокой сложности определяет то, осуществляется или нет автономное вождение рассматриваемого транспортного средства 60. Когда осуществляется автономное вождение рассматриваемого транспортного средства 60 (этап S1: Y), обработка переходит к этапу S2, чтобы определять то, имеются или не точки, в которых автономное вождение является затруднительным, перед запланированным путем движения. Когда не осуществляется автономное вождение рассматриваемого транспортного средства 60 (этап S1: N), обработка завершается.
[0050] На этапе S2, модуль 70 извлечения точек высокой сложности определяет то, имеется или нет точка высокой сложности, в которой автономное вождение является затруднительным, перед запланированным путем движения. Когда имеется точка высокой сложности (этап S2: Y), обработка переходит к этапу S3, чтобы определять то, необходимо или нет переключение на вождение вручную. Когда отсутствует точка высокой сложности (этап S2: N), обработка завершается.
На этапе S3, модуль 71 определения едущих сзади транспортных средств указывает точку A, которая расположена на предварительно определенном расстоянии D1 или более перед точкой высокой сложности, и в которой едущее сзади транспортное средство является распознаваемым. Это служит для того, чтобы определять присутствие или отсутствие едущего сзади транспортного средства в точке A, расположенной перед точкой высокой сложности, и в силу этого определять необходимость переключения на вождение вручную.
[0051] На этапе S4, модуль 71 определения едущих сзади транспортных средств определяет то, достигает или нет рассматриваемое транспортное средство 60 точки A. Когда рассматриваемое транспортное средство 60 достигает точки A (этап S4: Y), обработка переходит к этапу S5. Когда рассматриваемое транспортное средство 60 еще не достигает точки A (этап S4: N), обработка возвращается к этапу S4.
На этапе S5, модуль 71 определения едущих сзади транспортных средств определяет в точке A то, присутствует или нет едущее сзади транспортное средство 83, движущееся в полосе 61 движения, идентичной полосе движения рассматриваемого транспортного средства 60, в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60. Когда едущее сзади транспортное средство присутствует (этап S5: Y), обработка переходит к этапу S6. Когда едущее сзади транспортное средство не присутствует (этап S5: N), обработка переходит к этапу S7.
[0052] На этапе S6, модуль 72 управления переключением направляет переключение состояния движения рассматриваемого транспортного средства 60 с режима автономного вождения на режим вождения вручную. Это служит для того, чтобы уменьшать дискомфорт у водителя, вызываемый вследствие приближения едущего сзади транспортного средства к рассматриваемому транспортному средству 60, остановленному в точке высокой сложности посредством автономного вождения, посредством переключения состояния движения рассматриваемого транспортного средства 60 в режим вождения вручную.
Когда едущее сзади транспортное средство не присутствует (этап S5: N), модуль 72 управления переключением продолжает автономное вождение на этапе S7.
[0053] На этапе S8, модуль 73 определения других транспортных средств определяет то, достигает или нет рассматриваемое транспортное средство 60 точки B, расположенной на втором определенном расстоянии D2 перед точкой высокой сложности. Это служит для того, чтобы определять, перед точкой высокой сложности, то, присутствуют или нет другие транспортные средства, представляющие собой помеху для автономного вождения, в точке высокой сложности.
Когда рассматриваемое транспортное средство 60 достигает точки B (этап S8: Y), обработка переходит к этапу S9. Когда рассматриваемое транспортное средство 60 еще не достигает точки B (этап S8: N), обработка возвращается к этапу S8.
[0054] На этапе S9, чтобы определять то, следует или нет инструктировать рассматриваемому транспортному средству 60 вручную двигаться в точке высокой сложности, модуль 73 определения других транспортных средств определяет то, присутствуют или нет одно или более других транспортных средств 64, представляющих собой помехи для движения рассматриваемого транспортного средства 60, в точке высокой сложности. Когда одно или более других транспортных средств 64 присутствуют (этап S9: Y), обработка переходит к этапу S10. Когда отсутствует другое транспортное средство 64 (этап S9: N), обработка переходит к этапу S11.
[0055] На этапе S10, модуль 74 управления скоростью транспортного средства замедляет рассматриваемое транспортное средство 60. Дополнительно, модуль 72 управления переключением направляет переключение с режима автономного вождения на режим вождения вручную. После этого обработка завершается.
На этапе S11, модуль 72 управления переключением продолжает автономное вождение, чтобы инструктировать рассматриваемому транспортному средству 60 автономно двигаться в точке высокой сложности. После этого обработка завершается.
[0056] Преимущества варианта осуществления
(1) Модуль 70 извлечения точек высокой сложности извлекает точку высокой сложности, в которой автономное вождение является затруднительным по запланированному пути движения рассматриваемого транспортного средства 60. Когда рассматриваемое транспортное средство 60 приближается к точке A, расположенной на первом предварительно определенном расстоянии D1 или более перед точкой высокой сложности, модуль 71 определения едущих сзади транспортных средств определяет то, присутствует или нет едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства 60, в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства. Когда едущее сзади транспортное средство присутствует в пределах предварительно определенного диапазона относительно рассматриваемого транспортного средства 60, модуль 72 управления переключением направляет переключение состояния движения рассматриваемого транспортного средства 60 с автономного вождения на вождение вручную.
Это позволяет уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства, вызываемый, когда рассматриваемое транспортное средство 60 автономно останавливается посредством автономного вождения в точке высокой сложности, в которой автономное вождение является затруднительным.
[0057] (2) Точка высокой сложности может представлять собой точку, в которой полоса 61 движения рассматриваемого транспортного средства присоединяется к другой полосе движения (например, точку, имеющую форму дороги, в которой полосы движения сливаются или пересекаются). В зависимости от условий движения, таких как степень затора, автономное вождение может быть затруднительным в точке, в которой полоса 61 движения присоединяется к другой полосе движения, вследствие присутствия другого транспортного средства 64, движущегося в другой полосе движения, присоединяющейся к полосе 61 движения. Извлечение, в качестве точки высокой сложности, точки, в которой полоса 61 движения присоединяется к другой полосе движения, обеспечивает уменьшение дискомфорта у водителя вследствие приближения едущего сзади транспортного средства, вызываемого, когда рассматриваемое транспортное средство 60 останавливается посредством автономного вождения в такой точке.
[0058] (3) Точка высокой сложности может представлять собой зону слияния, заключающую в себе смену полосы движения, которая может представлять собой зону слияния, в которой расстояние или время движения из начальной точки зоны слияния в ее конечную точку меньше порогового значения. Поскольку имеется меньшая вероятность выполнять смену полосы движения в короткой зоне слияния, автономное вождение становится трудным в зависимости от условий движения, таких как степень затора. Извлечение, в качестве точки высокой сложности, короткой зоны слияния, заключающей в себе смену полосы движения, позволяет уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства, вызываемый, когда рассматриваемое транспортное средство 60 автономно останавливается посредством автономного вождения в такой зоне слияния.
[0059] (4) Точка высокой сложности может представлять собой зону без полос движения, имеющую ширину, соответствующую множеству полос движения. Например, движение в зоне без полос движения, имеющей ширину, соответствующую множеству полос движения, такой как зона без полос движения перед пунктом взимания платы за проезд платной дороги, требует операции вождения для вклинивания перед другим транспортным средством в зависимости от условий движения, так что автономное вождение является затруднительным. Извлечение, в качестве точки высокой сложности, зоны без полос движения, имеющей ширину, соответствующую множеству полос движения, позволяет уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства, вызываемый, когда рассматриваемое транспортное средство 60 автономно останавливается посредством автономного вождения в такой зоне без полос движения.
[0060] (5) Когда отсутствует едущее сзади транспортное средство в пределах предварительно определенного диапазона, модуль 72 управления переключением продолжает автономное вождение до точки B, расположенной на втором предварительно определенном расстоянии D2 перед точкой высокой сложности. Когда рассматриваемое транспортное средство 60 достигает точки B, расположенной на втором предварительно определенном расстоянии перед точкой высокой сложности, модуль 73 определения других транспортных средств определяет то, присутствуют или нет одно или более других транспортных средств в точке высокой сложности. Когда имеются одно или более других транспортных средств в точке высокой сложности, модуль 74 управления скоростью транспортного средства замедляет рассматриваемое транспортное средство, и модуль 72 управления переключением направляет переключение состояния движения рассматриваемого транспортного средства 60 с автономного вождения на вождение вручную.
Таким образом, когда имеются одно или более других транспортных средств в точке высокой сложности, переключение на вождение вручную направляется, что позволяет уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства, вызываемый, когда рассматриваемое транспортное средство 60 автономно останавливается посредством автономного вождения в точке высокой сложности.
[0061] Дополнительно, посредством направления переключения при замедлении, водитель может позволять себе выполнять вождение вручную.
(6) Когда отсутствует другое транспортное средство в точке высокой сложности, модуль 72 управления переключением продолжает автономное вождение.
Как результат, продолжение автономного вождения, когда отсутствует другое транспортное средство в точке высокой сложности, позволяет уменьшать нагрузку при вождении на водителе.
[0062] (7) В точке, которая расположена на первом предварительно определенном расстоянии D1 или более перед точкой высокой сложности, и в которой едущее сзади транспортное средство является распознаваемым, модуль 71 определения едущих сзади транспортных средств определяет то, имеются или нет едущие сзади транспортные средства в пределах предварительно определенного диапазона.
Таким образом, например, даже если имеется точка, в которой затруднительно распознавать едущее сзади транспортное средство вследствие формы дороги полосы движения рассматриваемого транспортного средства 60, присутствие едущего сзади транспортного средства может распознаваться в точке, расположенной на первом предварительно определенном расстоянии D1 или более перед точкой высокой сложности.
(8) Модуль 72 управления переключением переключает состояние движения рассматриваемого транспортного средства с автономного вождения на вождение вручную, когда имеется едущее сзади транспортное средство в пределах предварительно определенного диапазона.
Это позволяет уменьшать дискомфорт у водителя вследствие приближения едущего сзади транспортного средства, вызываемый, когда рассматриваемое транспортное средство 60 автономно останавливается посредством автономного вождения в точке высокой сложности, в которой автономное вождение является затруднительным.
[0063] Все примеры и условный язык, предоставленные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и принципов, вносимых автором изобретения в область техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, и также организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. Хотя выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что различные изменения, замены и модификации могут вноситься в них без отступления от сущности и объема изобретения.
Перечень позиционных обозначений
[0064] 1 - устройство помощи при вождении
10 - группа датчиков окружающих условий
11 - устройство измерения расстояния
12 - камера
20 - навигационная система
21 - навигационный контроллер
22 - устройство позиционирования
23 - картографическая база данных
24 - модуль отображения
25 - функциональный модуль
26 - модуль аудиовывода
27 - модуль связи
30 - группа датчиков транспортного средства
31 - датчик скорости транспортного средства
32 - датчик ускорения
33 - гиродатчик
34 - датчик угла поворота при рулении
35 - датчик акселератора
36 - датчик торможения
40 - контроллер
41 - процессор
42 - устройство хранения данных
43 - переключатель смены режима
50 - группа актуаторов управления транспортным средством
51 - актуатор рулевого управления
52 - актуатор позиции акселератора
53 - актуатор управления тормозом
70 - модуль извлечения точек высокой сложности
71 - модуль определения едущих сзади транспортных средств
72 - модуль управления переключением
73 - модуль определения других транспортных средств
74 - модуль управления скоростью транспортного средства




Группа изобретений относится к устройству и способу помощи при вождении. Устройство помощи при вождении содержит датчик, актуатор и контроллер. Датчик служит для обнаружения окружающих условий рассматриваемого транспортного средства. Актуатор служит для вождения, торможения и руления рассматриваемого транспортного средства. Контроллер выполнен с возможностью выполнять автономное вождение посредством управления актуатором на основе результата обнаружения датчика. Контроллер извлекает точку высокой сложности на запланированном пути движения рассматриваемого транспортного средства, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения. Затем контроллер определяет, присутствует или нет едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства, в пределах предварительно определенного диапазона от рассматриваемого транспортного средства, когда рассматриваемое транспортное средство достигает точки, расположенной на втором предварительно определенном расстоянии или более перед точкой высокой сложности. Причем второе предварительно определенное расстояние превышает первое предварительно определенное расстояние от точки высокой сложности до точки, в которой рассматриваемое транспортное средство может определять, присутствуют или нет другие транспортные средства на другой полосе движения. Затем направляет переключение состояния движения рассматриваемого транспортного средства с автономного вождения на вождение вручную, когда едущее сзади транспортное средство присутствует в пределах предварительно определенного диапазона от рассматриваемого транспортного средства. Достигается создание системы, определяющей необходимость перехода из режима автоматического вождения в ручной режим. 2 н. и 6 з.п. ф-лы, 11 ил.
1. Способ помощи при вождении, содержащий этапы, на которых:
- извлекают точку высокой сложности на запланированном пути движения рассматриваемого транспортного средства, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения;
- когда рассматриваемое транспортное средство достигает точки, расположенной на втором предварительно определенном расстоянии или более перед точкой высокой сложности, причем второе предварительно определенное расстояние превышает первое предварительно определенное расстояние от точки высокой сложности до точки, в которой рассматриваемое транспортное средство может определять то, присутствуют или нет другие транспортные средства на другой полосе движения, определяют то, присутствует или нет едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства, в пределах предварительно определенного диапазона от рассматриваемого транспортного средства; и
- направляют переключение состояния движения рассматриваемого транспортного средства с автономного вождения на вождение вручную, когда едущее сзади транспортное средство присутствует в пределах предварительно определенного диапазона от рассматриваемого транспортного средства.
2. Способ помощи при вождении по п. 1, в котором точка высокой сложности представляет собой зону слияния, заключающую в себе смену полосы движения, причем зону слияния, в которой расстояние или время движения из начальной точки зоны слияния в ее конечную точку меньше порогового значения.
3. Способ помощи при вождении по п. 1, в котором точка высокой сложности представляет собой зону без полос движения, имеющую ширину, соответствующую множеству полос движения.
4. Способ помощи при вождении по любому из пп. 1-3, в котором, когда едущее сзади транспортное средство не присутствует в пределах предварительно определенного диапазона, автономное вождение продолжается до точки, расположенной на втором предварительно определенном расстоянии перед точкой высокой сложности, и определяется, в точке, расположенной на втором предварительно определенном расстоянии перед точкой высокой сложности, то, имеются или нет одно или более других транспортных средств в точке высокой сложности, при этом, когда имеются одно или более других транспортных средств в точке высокой сложности, рассматриваемое транспортное средство замедляется, и переключение состояния движения с автономного вождения на вождение вручную направляется.
5. Способ помощи при вождении по п. 4, в котором, когда отсутствует другое транспортное средство в точке высокой сложности, автономное вождение продолжается.
6. Способ помощи при вождении по любому из пп. 1-3, в котором в точке, которая расположена на предварительно определенном расстоянии или более перед точкой высокой сложности и в которой едущее сзади транспортное средство является распознаваемым, определяется то, присутствует или нет едущее сзади транспортное средство в пределах предварительно определенного диапазона.
7. Способ помощи при вождении по любому из пп. 1-3, в котором, когда имеется едущее сзади транспортное средство в пределах предварительно определенного диапазона, состояние движения рассматриваемого транспортного средства переключается с автономного вождения на вождение вручную.
8. Устройство помощи при вождении, содержащее:
- датчик, выполненный с возможностью обнаруживать окружающие условия рассматриваемого транспортного средства;
- актуатор, выполненный с возможностью реализовывать по меньшей мере одно из вождения, торможения и руления рассматриваемого транспортного средства; и
- контроллер, выполненный с возможностью выполнять автономное вождение посредством управления актуатором на основе результата обнаружения датчика, причем контроллер извлекает точку высокой сложности на запланированном пути движения рассматриваемого транспортного средства, в которой полоса движения рассматриваемого транспортного средства присоединяется к другой полосе движения, определяет то, присутствует или нет едущее сзади транспортное средство, движущееся в полосе движения, идентичной полосе движения рассматриваемого транспортного средства, в пределах предварительно определенного диапазона от рассматриваемого транспортного средства, когда рассматриваемое транспортное средство достигает точки, расположенной на втором предварительно определенном расстоянии или более перед точкой высокой сложности, причем второе предварительно определенное расстояние превышает первое предварительно определенное расстояние от точки высокой сложности до точки, в которой рассматриваемое транспортное средство может определять то, присутствуют или нет другие транспортные средства на другой полосе движения, и направляет переключение состояния движения рассматриваемого транспортного средства с автономного вождения на вождение вручную, когда едущее сзади транспортное средство присутствует в пределах предварительно определенного диапазона от рассматриваемого транспортного средства.
| JP 2017019397 A, 26.01.2017 | |||
| JP 2015141560 A, 03.08.2015 | |||
| JP 2009230377 A, 08.10.2009 | |||
| JP H10320691 A, 04.12.1998 | |||
| JP H08263793 A, 11.10.1996. |

