Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится, в транспортном средстве, выполненном с возможностью переключения вождения вручную и автоматизированного вождения между собой, к способу управления вождением и к устройству для этого, с тем чтобы задавать характеристики вождения, применяемые к автоматизированному вождению.
Уровень техники
[0002] Традиционно, предусмотрено устройство управления вождением, раскрытое в патентном документе 1, которое выполняет автоматизированное вождение в состоянии, чтобы облегчать странное ощущение, возникающее у водителя. Устройство управления вождением, раскрытое в патентном документе 1, распознает, в ассоциации с окружением вождения, операции вождения, выполняемые водителем во время вождения вручную, обращается к распознанному результату и выполняет автоматизированное вождение.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация не прошедшей экспертизу заявки на патент Японии номер 2015-89801
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, характеристики вождения, распознанные во время предыдущего вождения вручную, могут отличаться от характеристик вождения, требуемых человеком, занимающим место в транспортном средстве, транспортного средства в текущей поездке. В таком случае, вышеуказанное устройство управления вождением предшествующего уровня техники передает распознанный результат предыдущего вождения вручную в автоматизированное вождение, и в силу этого имеется проблема в том, что автоматизированное вождение выполняется на основе характеристик вождения, отличающихся от характеристик вождения, требуемых человеком, занимающем место в транспортном средстве.
[0005] Соответственно, настоящее изобретение предлагает, с учетом вышеуказанной обстановки, способ управления вождением и устройство для этого, выполненные с возможностью выполнения автоматизированного вождения согласно характеристикам вождения, требуемым для текущей поездки человеком, занимающим место в транспортном средстве, транспортного средства.
Средство для решения задач
[0006] Чтобы разрешать вышеуказанную проблему, способ управления вождением и устройство для этого согласно аспекту настоящего изобретения сравнивают, в транспортном средстве, выполненном с возможностью переключения вождения вручную для того, чтобы приводить в движение транспортное средство согласно операциям вождения человека, занимающего место в транспортном средстве, и автоматизированного вождения для того, чтобы автоматически приводить в движение транспортное средство, между собой, характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения. Если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, характеристики вождения, применяемые к автоматизированному вождению, задаются согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке.
Преимущества изобретения
[0007] Согласно настоящему изобретению, автоматизированное вождение в текущей поездке может выполняться согласно характеристикам вождения, требуемым человеком, занимающим место в транспортном средстве, транспортного средства.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой, иллюстрирующей конкретную аппаратную конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является блок-схемой, иллюстрирующей конкретную аппаратную конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является видом, поясняющим временной промежуток в начале правого поворота на перекрестке.
Фиг. 5 является видом, поясняющим временной промежуток во время въезда на перекресток, на котором накладывается ограничение на остановку.
Фиг. 6 является видом, поясняющим расстояние до едущего сзади сбоку транспортного средства между рассматриваемым транспортным средством и едущим сзади транспортным средством, движущимся в следующей полосе движения.
Фиг. 7 является видом, поясняющим расстояние сбоку между рассматриваемым транспортным средством и припаркованным или остановленным транспортным средством.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки процесса определения характеристик вождения, выполняемого посредством устройства управления вождением согласно первому варианту осуществления настоящего изобретения.
Фиг. 9 является видом, поясняющим технологию классификации окружений при движении в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 10 является видом, поясняющим технологию классификации состояний движения в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 11 является видом, поясняющим технологию оценки отклонения между характеристиками вождения текущей поездки и опорными характеристиками вождения в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 12 является видом, поясняющим технологию получения данных для того, чтобы оценивать характеристики вождения в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 13 является видом, поясняющим технологию определения характеристик вождения, применяемых к автоматизированному вождению, в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 14 является видом, поясняющим технологию задания временного промежутка, применяемого к автоматизированному вождению, в процессе определения характеристик вождения согласно первому варианту осуществления настоящего изобретения.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки процесса определения характеристик вождения, выполняемого посредством устройства управления вождением согласно второму варианту осуществления настоящего изобретения.
Фиг. 16 является видом, поясняющим технологию получения данных для того, чтобы оценивать характеристики вождения в процессе определения характеристик вождения согласно второму варианту осуществления настоящего изобретения.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей этапы обработки процесса определения характеристик вождения, выполняемого посредством устройства управления вождением согласно третьему варианту осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0009] Первый вариант осуществления
В дальнейшем в этом документе, поясняется первый вариант осуществления согласно настоящему изобретению со ссылкой на чертежи.
[0010] Конфигурация системы управления вождением
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно этому варианту осуществления. Кроме того, фиг. 2 и 3 являются блок-схемами, иллюстрирующими примеры конкретной аппаратной конфигурации системы управления вождением, включающей в себя устройство управления вождением согласно варианту осуществления. Как проиллюстрировано на фиг. 1, система 100 управления вождением согласно настоящему варианту осуществления включает в себя устройство 1 управления вождением, модуль 3 обнаружения состояний движения, модуль 5 обнаружения окружающих условий, переключатель 7 смены режима вождения, модуль 9 регулирования характеристик вождения и дисплей 11. Дополнительно, система 100 управления вождением соединяется с модулем 13 отображения состояния управления, модулем 15 управления исполнительным устройством и исполнительными устройствами 17, которые устанавливаются в транспортном средстве.
[0011] В транспортном средстве, которое выполнено с возможностью переключения вождения вручную и автоматизированного вождения между собой, устройство 1 управления вождением представляет собой контроллер, который выполняет процесс определения характеристик вождения для того, чтобы определять характеристики вождения, применяемые к автоматизированному вождению. В частности, устройство 1 управления вождением сравнивает характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения. Если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, характеристики вождения, применяемые к автоматизированному вождению, задаются согласно характеристикам человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке. Здесь, вождение вручную означает приведение в движение транспортного средства согласно операциям вождения человека, занимающего место в транспортном средстве, а автоматизированное вождение означает приведение в движение транспортного средства без операций вождения человека, занимающего место в транспортном средстве. Характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную могут представлять собой рабочие величины при вождении (величину ускорения, величину руления и т.п.), поскольку они получаются или могут получаться из рабочих величин человека, занимающего место в транспортном средстве. Альтернативно, характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную могут представлять собой поведение транспортного средства (скорость, ускорение, угловую скорость относительно вертикальной оси и т.п.) как есть. Вождение вручную не обязательно представляет собой состояние, в котором человек, занимающий место в транспортном средстве, управляет всеми органами управления (например, акселератором, тормозом, рулем, модулем задания/контроллером постоянной скорости, контроллером стеклоочистителя и контроллером передних фар), которые должны управляться человеком, занимающем место в транспортном средстве. Если управляются некоторые органы управления, которые должны управляться человеком, занимающим место в транспортном средстве, чтобы приводить в движение транспортное средство, управляемая часть находится в состоянии вождения вручную, а не управляемые части находятся в состоянии автоматизированного вождения. Таким образом, состояние вождения вручную или автоматизированного вождения может задаваться для каждого органа управления. Устройство 1 управления вождением включает в себя модуль 21 получения информации, модуль 23 оценки характеристик вождения, модуль 25 хранения опорных характеристик вождения, модуль 27 определения характеристик вождения и модуль 29 выполнения управления автоматизированным вождением и, как проиллюстрировано на фиг. 2, устанавливается в транспортном средстве 50. Альтернативно, как проиллюстрировано на фиг. 3, транспортное средство 50 может содержать устройство 59 связи и сервер 61, чтобы сохранять данные. В частности, данные для вождения вручную транспортного средства 50 имеют большой объем, и в силу этого их лучше сохранять на сервере 61. Дополнительно, устройство 1 управления вождением может размещаться на сервере 61. Данные относительно характеристик вождения не всегда должны обязательно сохраняться, как и отражаться в опорных характеристиках вождения. Опорные характеристики вождения задаются для каждого транспортного средства и не могут обновляться. Например, можно сравнивать данные, полученные в реальном времени в текущей поездке, с опорными характеристиками вождения, за счет этого оценивая то, имеется или нет предварительно определенное отклонение между характеристиками вождения текущей поездки и опорными характеристиками вождения. Тем не менее, накопление полученных данных и отражение накопленных данных в опорных характеристиках вождения может приводить к заданию опорных характеристик вождения в качестве подходящего опорного уровня оценки для человека, занимающего место в транспортном средстве. Это позволяет оценивать то, представляют собой характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке обычные характеристики вождения или необычные характеристики вождения человека, занимающего место в транспортном средстве. А именно, может достигаться оценка, подходящая для данного человека, занимающего место в транспортном средстве.
[0012] Модуль 3 обнаружения состояний движения должен обнаруживать состояние движения, указывающее данные транспортного средства 50, такие как скорость, угол поворота при рулении и ускорение, и, например, представляет собой смонтированную в транспортном средстве сеть, такую как CAN 51 (контроллерная сеть), или навигационное устройство 53.
[0013] Модуль 5 обнаружения окружающих условий должен обнаруживать окружающие условия, указывающие данные транспортного средства 50, такие как расстояние между транспортными средствами до едущего впереди транспортного средства, позиция припаркованного транспортного средства и расстояние до перекрестка, и включает в себя, например, камеру 55, лазерный радар 57 и навигационное устройство 53, которые монтируются на транспортном средстве. Помимо этого, можно использовать сонар, связь между транспортными средствами или связь между транспортным средством и дорожной инфраструктурой для того, чтобы обнаруживать окружающие условия.
[0014] Переключатель 7 смены режима вождения представляет собой переключатель, установленный в транспортном средстве и управляемый человеком, занимающим место в транспортном средстве, транспортного средства с возможностью изменять автоматизированное вождение и вождение вручную между собой. Модуль 9 регулирования характеристик вождения представляет собой рабочий переключатель, смонтированный на транспортном средстве с возможностью принимать ввод от человека, занимающего место в транспортном средстве, транспортного средства таким образом, чтобы регулировать характеристики вождения для автоматизированного вождения. Например, ввод для того, чтобы регулировать скорость транспортного средства или расстояние между транспортными средствами для автоматизированного вождения, принимается от человека, занимающего место в транспортном средстве, транспортного средства. Модуль 9 регулирования характеристик вождения может всегда отображать, на приборе, параметры характеристик вождения, заданные в текущий момент, или может отображать их в ответ на запрос от водителя. Человек, занимающий место в транспортном средстве, транспортного средства имеет возможность регулировать соответствующие параметры до начала автоматизированного вождения или во время него. Человек, занимающий место в транспортном средстве, может задавать параметры из меню задания параметров. Модуль 9 регулирования характеристик вождения, например, может представлять собой функциональную кнопку, размещаемую на руле, либо функциональную кнопку или сенсорную панель, размещаемую на центральной консоли.
[0015] Дисплей 11 отображает состояние управления процесса определения характеристик вождения, проводимого посредством устройства 1 управления вождением. Например, характеристики вождения во время автоматизированного вождения, такие как скорость транспортного средства и расстояние между транспортными средствами, предоставляются для водителя. Во время переключения вождения вручную на автоматизированное вождение, если человек, занимающий место в транспортном средстве, транспортного средства выбирает характеристики вождения, выбранные характеристики вождения отображаются. Дисплей 11 может представлять собой экран отображения навигационного устройства 53 или дисплей на лобовом стекле. Модуль 13 отображения состояния управления выполняет процессы обнаружения управляемого состояния во время выполнения автоматизированного вождения из устройства 1 управления вождением и его отображения на дисплее 11.
[0016] Модуль 15 управления исполнительным устройством выполняет процессы получения выводов управления автоматизированным вождением из устройства 1 управления вождением и приведения в действие различных исполнительных устройств 17, установленных в транспортном средстве. Исполнительные устройства 17 представляют собой модули привода, размещаемые с возможностью приводить в действие такие части, как акселератор, тормоз и руль транспортного средства 50.
[0017] В дальнейшем поясняются модули, формирующие устройство 1 управления вождением. Модуль 21 получения информации получает данные относительно состояния движения транспортного средства 50, обнаруженные посредством модуля 3 обнаружения состояний движения, и данные относительно окружающих условий транспортного средства 50, обнаруженные посредством модуля 5 обнаружения окружающих условий. В частности, модуль 21 получения информации получает, в качестве состояния движения транспортного средства 50, такие данные, как скорость, время торможения и ускорение. Кроме того, он получает, в качестве окружающих условий транспортного средства 50, расстояние между транспортными средствами, время проезда расстояния между движущимися в потоке транспортными средствами и относительную скорость относительно едущего впереди транспортного средства, временной промежуток относительно встречного транспортного средства или пересекающегося транспортного средства, расстояние сбоку до припаркованного или остановленного транспортного средства и расстояние и время до едущего сзади сбоку транспортного средства относительно едущего сзади сбоку транспортного средства.
[0018] Модуль 23 оценки характеристик вождения использует данные, полученные посредством модуля 21 получения информации, накапливает данные вождения вручную в текущей поездке транспортного средства и оценивает характеристики вождения текущей поездки. В это время, модуль 23 оценки характеристик вождения задает не использовать данные, накопленные сразу после начала движения транспортного средства, например, данные, накопленные в пределах четвертого предварительно определенного времени после начала движения. Сразу после начала движения транспортного средства, характеристики вождения являются нестабильными, и в силу этого используются данные после того, как характеристики вождения становятся стабильными. Например, вождение может начинаться из дома или компании, позиционированной на большом расстоянии от шоссе. Дом или компания может находиться в области, в которой сконцентрированы здания. В такой области, дороги могут быть узкими, и может быть предусмотрено много перекрестков. В таком случае, число операций ускорения и замедления и число правых и левых поворотов является большим, что исключает обнаружение стабильных данных. Дополнительно, если вождение начинается из места около скоростной автомагистрали или шоссе, характеристики вождения транспортного средства должны регулироваться согласно трафику скоростной автомагистрали или шоссе. В таком случае, требуются ускорение, замедление и смена полосы движения, что исключает обнаружение стабильных данных. Соответственно, четвертое предварительно определенное время задается равным времени, в которое характеристики вождения транспортного средства становятся стабильными. В этом случае, данные могут накапливаться, когда четвертое предварительно определенное время истекает после начала движения, либо могут накапливаться после начала движения при отбрасывании данных, накопленных до истечения четвертого предварительно определенного времени.
[0019] Данные вождения вручную, накопленные для оценки характеристик вождения текущей поездки, представляют собой, по меньшей мере, одно из скорости транспортного средства, расстояния между транспортными средствами, времени проезда расстояния между движущимися в потоке транспортными средствами или относительной скорости между транспортным средством и едущим впереди транспортным средством, времени торможения транспортного средства и ускорения транспортного средства. Дополнительно, можно включать любое из временного промежутка между транспортным средством и встречным транспортным средством или пересекающимся транспортным средством, расстояния или времени до едущего сзади сбоку транспортного средства между транспортным средством и едущим сзади сбоку транспортным средством и расстояния сбоку между транспортным средством и припаркованным или остановленным транспортным средством.
[0020] Из них, временной промежуток представляет собой временную разность между транспортным средством и прямо надвигающимся встречным транспортным средством, когда транспортное средство начинает правый поворот на перекрестке, или временную разность между транспортным средством и пересекающимся транспортным средством, когда транспортное средство начинает правый поворот на перекрестке, на котором накладывается ограничение на остановку. Со ссылкой на фиг. 4, в дальнейшем поясняется временной промежуток, когда транспортное средство начинает правый поворот на перекрестке. Как проиллюстрировано на фиг. 4, начальная точка правого поворота представляет собой P0, и точка, в которой рассматриваемое транспортное средство C и прямо надвигающееся встречное транспортное средство D пересекают друг друга, представляет собой P1. Оцененное время прибытия прямо надвигающегося встречного транспортного средства D из его позиции движения в то время, когда рассматриваемое транспортное средство C достигает точки P0, в точку P1 представляет собой временной промежуток между рассматриваемым транспортным средством и прямо надвигающимся встречным транспортным средством.
[0021] Со ссылкой на фиг. 5, в дальнейшем поясняется временной промежуток, когда транспортное средство въезжает на перекресток, на котором накладывается ограничение на остановку. Как проиллюстрировано на фиг. 5, точка, в которой рассматриваемое транспортное средство C начинает въезжать на перекресток, представляет собой P0, и точка, в которой рассматриваемое транспортное средство C пересекает пересекающееся транспортное средство E, представляет собой P2 или P3. Оцененное время прибытия пересекающегося транспортного средства E из его позиции движения в то время, когда рассматриваемое транспортное средство C достигает точки P0, в точку P2 или P3 представляет собой временной промежуток между рассматриваемым транспортным средством и пересекающимся транспортным средством.
[0022] Со ссылкой на фиг. 6, в дальнейшем поясняется расстояние до едущего сзади сбоку транспортного средства между рассматриваемым транспортным средством и едущим сзади сбоку транспортным средством. Как проиллюстрировано на фиг. 6, когда рассматриваемое транспортное средство C присоединяется и въезжает на главную полосу движения скоростной автомагистрали или шоссе, транспортное средство F1, движущееся в главной полосе движения, представляет собой едущее сзади сбоку транспортное средство, и расстояние L1 представляет собой расстояние до едущего сзади сбоку транспортного средства. Когда рассматриваемое транспортное средство C, движущееся по односторонней дороге, сменяет полосу движения, движущееся транспортное средство F2 в полосе движения, на которую должно выполнять смену рассматриваемое транспортное средство C, представляет собой едущее сзади сбоку транспортное средство, и расстояние L2 представляет собой расстояние до едущего сзади сбоку транспортного средства. Как проиллюстрировано на фиг. 7, когда рассматриваемое транспортное средство C на односторонней дороге обгоняет припаркованное или остановленное транспортное средство G, расстояние между рассматриваемым транспортным средством C и припаркованным или остановленным транспортным средством G представляет собой расстояние L3 сбоку.
[0023] Предыстория операций, введенных человеком, занимающим место в транспортном средстве, через модуль 9 регулирования характеристик вождения для того, чтобы регулировать характеристики вождения, также накапливается для каждого окружения при движении и для каждого состояния движения в качестве данных для того, чтобы оценивать характеристики вождения текущей поездки. Параметры автоматизированного вождения задаются для каждого водителя согласно предыдущим характеристикам вождения и текущим характеристикам вождения. Несмотря на это, движение посредством автоматизированного вождения не всегда соответствует намерению водителя. Такой случай возникает, когда, например, водитель движется в окружении при движении, не предусмотренном в предыдущем вождении, состояние водителя изменяются во время автоматизированного вождения, или водитель изменяет требуемый режим во время автоматизированного вождения. Например, такой случай возникает, когда необходимость спешить прекращается, либо наоборот, когда необходимость спешить возникает. В таком случае, на основе предыстории операций, введенных человеком, занимающим место в транспортном средстве, через модуль 9 регулирования характеристик вождения, характеристики вождения регулируются до характеристик вождения, намеченных человеком, занимающем место в транспортном средстве. При движении в окружении при движении, не предусмотренном в предыдущем вождении, данные предыстории операций человека, занимающего место в транспортном средстве, накапливаются для окружения при движении и состояния движения таким образом, что данные используются для задания характеристик вождения для окружения при движении из следующего времени. Если состояние водителя изменяется во время автоматизированного вождения, данные предыстории операций человека, занимающего место в транспортном средстве, накапливаются в связи с состоянием водителя, чтобы сокращать число операций, которые должны выполняться в дальнейшем. Если режим, ожидаемый водителем, изменяется во время автоматизированного вождения, данные предыстории операций человека, занимающего место в транспортном средстве, накапливаются в связи с заданным режимом, таким как спешка, нормальный или медленный, так что ожидаемые параметры вождения точно задаются для каждого режима во время автоматизированного вождения.
[0024] Модуль 25 хранения опорных характеристик вождения заранее сохраняет опорные характеристики вождения, применяемые к автоматизированному вождению. Например, модуль 25 хранения опорных характеристик вождения накапливает данные относительно вождения вручную в предыдущих поездках транспортного средства и, согласно накопленным данным, задает опорные характеристики вождения. Данные, накопленные для формирования опорных характеристик вождения, являются аналогичными данным, накопленным для оценки характеристик вождения текущей поездки. Опорные характеристики вождения формируются и сохраняются для каждого окружения при движении и для каждого состояния движения для каждого параметра, такого как скорость и ускорение. Модуль 25 хранения опорных характеристик вождения может распознавать накопленные данные и задавать опорные характеристики вождения либо может проводить взвешенное усреднение таким образом, чтобы придавать больший вес более новым данным, и задавать опорные характеристики вождения соответствующим образом. Кроме того, можно задавать опорные характеристики вождения в связи с позиционной информацией и окружениями вождения. Например, опорные характеристики вождения формируются поточечно на карте. В этом случае, сформированные опорные характеристики вождения могут отражать дорожные условия каждой точки. Например, для точки, в которой дорожное движение является малоинтенсивным, такой параметр, как скорость, может задаваться равным более высокому значению.
[0025] Модуль 27 определения характеристик вождения сравнивает характеристики вождения текущей поездки с опорными характеристиками вождения, и если предварительно определенное отклонение возникает между характеристиками вождения текущей поездки и опорными характеристиками вождения, задает, согласно характеристикам вождения в текущей поездке, характеристики вождения, применяемые к автоматизированному вождению. Например, когда транспортное средство обычно ведется только водителем, скорость и ускорение транспортного средства являются относительно высокими. Тем не менее, водитель может хотеть ехать в ходе этой поездки посредством относительного снижения скорости и ускорения, поскольку в транспортном средстве имеется пожилой пассажир или младенец. В таком случае, характеристики вождения для вождения вручную человека, занимающего место в транспортном средстве, в этой поездке, такие как скорость и ускорение транспортного средства, имеют тенденцию снижаться. Как результат, отклонение возникает между характеристиками вождения для вождения вручную человека, занимающего место в транспортном средстве, в этой поездке и опорными характеристиками вождения. Если отклонение возникает, автоматизированное вождение выполняется согласно характеристикам вождения текущей поездки, за счет этого реализуя намеченное водителем автоматизированное вождение. В это время, модуль 27 определения характеристик вождения может задавать характеристики вождения текущей поездки как есть в качестве характеристик вождения автоматизированного вождения либо может задавать характеристики вождения, близкие к характеристикам вождения текущей поездки, в качестве характеристик вождения автоматизированного вождения. Альтернативно, если человек, занимающий место в транспортном средстве, транспортного средства управляет модулем 9 регулирования характеристик вождения, операция подтверждается, чтобы регулировать характеристики вождения, применяемые к автоматизированному вождению.
[0026] Модуль 29 выполнения управления автоматизированным вождением определяет, для маршрута вождения, заданного согласно пункту назначения, введенному человеком, занимающим место в транспортном средстве, транспортного средства, поведение при движении транспортного средства согласно окружающим условиям, полученным посредством модуля 21 получения информации. Модуль 29 выполнения управления автоматизированным вождением выполняет управление транспортным средством согласно определенному поведению транспортного средства. А именно, в транспортном средстве, пункт назначения задается, маршрут формируется, поведение определяется согласно результату распознавания окружающих условий, и согласно определенному поведению, управление автоматизированным вождением выполняется. После того, как поведение транспортного средства определяется, можно задавать целевой путь транспортного средства и управлять транспортным средством таким образом, что оно придерживается целевого пути. Характеристики вождения для вождения вручную в текущей поездке могут использоваться в качестве индексов для того, чтобы определять поведение транспортного средства. Помимо этого, характеристики вождения для вождения вручную в текущей поездке могут использоваться при выполнении управления транспортным средством. При выполнении управления транспортным средством, характеристики вождения могут отражаться в целевом значении, верхнем предельном значении, усилении или переменных фильтра. Дополнительно, модуль 29 выполнения управления автоматизированным вождением выполняет автоматизированное вождение, когда секция автоматизированного вождения достигнута, либо когда человек, занимающий место в транспортном средстве, транспортного средства выбирает автоматизированное вождение. В это время, модуль 29 выполнения управления автоматизированным вождением выполняет автоматизированное вождение согласно характеристикам вождения, заданным посредством модуля 27 определения характеристик вождения. Кроме того, характеристики вождения могут регулироваться согласно тому, имеется или нет пассажир в транспортном средстве, либо согласно атрибутам пассажира. Также можно регулировать характеристики вождения согласно физическому состоянию водителя или согласно требуемому времени прибытия в пункт назначения, введенному человеком, занимающим место в транспортном средстве, транспортного средства.
[0027] Устройство 1 управления вождением состоит из электронных схем общего назначения, включающих в себя микрокомпьютеры, микропроцессоры и CPU и периферийные устройства, такие как запоминающие устройства. Оно выполняет конкретные программы, чтобы работать в качестве вышеуказанного модуля 21 получения информации, модуля 23 оценки характеристик вождения, модуля 25 хранения опорных характеристик вождения, модуля 27 определения характеристик вождения и модуля 29 выполнения управления автоматизированным вождением. Эти функции устройства 1 управления вождением могут размещаться в качестве одной или множества схем обработки. Схемы обработки включают в себя, например, программируемые обрабатывающие устройства, к примеру, содержащие электрические схемы обрабатывающие устройства. Они также включают в себя специализированные интегральные схемы (ASIC) и традиционные схемные части, размещаемые с возможностью выполнять функции, предусмотренные в варианте осуществления.
[0028] Этапы процесса определения характеристик вождения
Далее поясняются этапы процесса определения характеристик вождения, осуществляемого посредством устройства 1 управления вождением согласно этому варианту осуществления, со ссылкой на блок-схему последовательности операций способа по фиг. 8. Процесс определения характеристик вождения, проиллюстрированный на фиг. 8, начинается, когда зажигание транспортного средства включается, чтобы начинать текущую поездку. Поездка представляет собой движение от включения зажигания транспортного средства до его выключения. Даже если зажигание в какой-то момент выключается в середине поездки в пункт назначения, поездка из точки отправления в пункт назначения может считаться одной поездкой.
[0029] Как проиллюстрировано на фиг. 8, сначала на этапе S101, модуль 21 получения информации получает информацию из навигационного устройства 53 и оценивает то, вводит или нет человек, занимающий место в транспортном средстве, транспортного средства пункт назначения, и то, задан или нет маршрут вождения. Если маршрут вождения задан, процесс переходит к этапу S103, а если маршрут вождения не задан, к этапу S105.
[0030] На этапе S103, модуль 29 выполнения управления автоматизированным вождением обнаруживает, на заданном маршруте вождения, секцию, в которой автоматизированное вождение является возможным, и задает секцию автоматизированного вождения. Секция автоматизированного вождения задается согласно пункту назначения, заданному водителем, и картографической информации и представляет собой, например, шоссе, скоростную автомагистраль, дорогу с двумя или более полос движения либо дорогу, имеющую предыдущую запись автоматизированного вождения.
[0031] На этапе S105, модуль 29 выполнения управления автоматизированным вождением оценивает то, должно или нет выполняться автоматизированное вождение. Модуль 29 выполнения управления автоматизированным вождением определяет выполнять автоматизированное вождение, если транспортное средство уже находится в секции автоматизированного вождения, либо если человек, занимающий место в транспортном средстве, транспортного средства управляет переключателем 7 смены режима вождения и выбирает автоматизированное вождение, и процесс переходит к этапу S129. С другой стороны, в ином случае, определяется выполнять вождение вручную, и этап S107 выполняется.
[0032] На этапе S107, модуль 29 выполнения управления автоматизированным вождением не выполняет автоматизированное вождение и задает вождение вручную. Как результат, операция вручную водителем транспортного средства начинается для того, чтобы вести транспортное средство.
[0033] На этапе S109, модуль 23 оценки характеристик вождения классифицирует окружение при движении (окружение движения), в котором движется в данный момент транспортное средство. Например, модуль 23 оценки характеристик вождения получает дорожную картографическую информацию из навигационного устройства 53 и проанализированную информацию изображений из камеры 55, и согласно информации, классифицирует окружение при движении на один из четырех типов S1-S4 дорог, проиллюстрированных на фиг. 9. На фиг. 9, окружение S1 при движении представляет собой тип дороги шоссе и выбирается, когда транспортное средство движется по обычной дороге с четырьмя полосами движения или более. Окружение S2 при движении представляет собой тип дороги "не-шоссе 1" и выбирается, когда транспортное средство движется по обычной дороге с двумя полосами движения. Окружение S3 при движении представляет собой тип дороги "не-шоссе 2" и выбирается, когда транспортное средство движется по обычной дороге без разделительных линий. Окружение S4 при движении представляет собой тип дороги "скоростная автомагистраль" и выбирается, когда транспортное средство движется по скоростной автомагистрали или платной дороге. Хотя фиг. 9 классифицирует обычные дороги на основе числа полос движения, можно классифицировать их на основе ширин полосы движения. Кроме того, можно классифицировать окружения при движении согласно вещам, отличным от типов дорог.
[0034] На этапе S111, модуль 23 оценки характеристик вождения классифицирует состояние движения, в котором движется в данный момент транспортное средство. Например, модуль 23 оценки характеристик вождения классифицирует состояние движения согласно такой информации, как то, имеется или нет едущее впереди транспортное средство, тормоз активирован или деактивирован, либо степень ускорения, на одно из шести состояний B1-B6 движения, проиллюстрированных на фиг. 10. Как проиллюстрировано на фиг. 10, состояние B1 движения представляет собой состояние движения, в котором транспортное средство движется в режиме оптимального регулирования скорости, и выбирается, если отсутствует едущее впереди транспортное средство, тормоз отключен, и степень ускорения меньше 0,05 G. Состояние B2 движения представляет собой состояние движения, в котором транспортное средство следует за другим транспортным средством, и выбирается, если имеется едущее впереди транспортное средство, тормоз отключен, и степень ускорения меньше 0,05 G. Состояние B3 движения представляет собой состояние движения "замедление 1" и выбирается, если отсутствует едущее впереди транспортное средство, и тормоз включен. Состояние B4 движения представляет собой состояние движения "замедление 2" и выбирается, если имеется едущее впереди транспортное средство, и тормоз включен. Состояние B5 движения представляет собой состояние движения ускорения 1 и выбирается, если отсутствует едущее впереди транспортное средство, тормоз отключен, и степень ускорения составляет 0,05 G или более. Состояние B6 движения представляет собой состояние движения ускорения 2 и выбирается, если имеется едущее впереди транспортное средство, тормоз отключен, и степень ускорения составляет 0,05 G или более. Вместо степени ускорения, можно использовать то, составляет открытие акселератора 20% или более, в качестве порогового значения.
[0035] На этапе S113, модуль 23 оценки характеристик вождения записывает указываемые параметры для окружения при движении, классифицированного на этапе S109, и состояния движения, классифицированного на этапе S111. Например, если транспортное средство движется по скоростной автомагистрали в состоянии движения следования за едущим впереди транспортным средством, окружение при движении записывается в качестве S4, а состояние движения - в качестве B2. Помимо этого, в качестве параметра состояния B2 движения, время проезда расстояния между движущимися в потоке транспортными средствами записывается, как проиллюстрировано на фиг. 10. В других случаях, если состояние движения представляет собой B1 "движение в режиме оптимального регулирования скорости", скорость записывается, как проиллюстрировано на фиг. 10, а если состояние движения представляет собой B3 "замедление 1", TTI (время до перекрестка: время до стоп-линии на перекрестке) при торможении записывается. Если состояние движения представляет собой B4 "замедление 2", TTC (время до столкновения: расстояние между транспортными средствами/относительная скорость) при торможении записывается, а если состояние движения представляет собой B5 "ускорение 1" или B6 "ускорение 2", степень ускорения записывается в качестве параметра. Циклы записи для того, чтобы записывать параметры, являются такими, как проиллюстрировано на фиг. 10.
[0036] На этапе S115, модуль 29 выполнения управления автоматизированным вождением оценивает то, приближается или нет транспортное средство к секции автоматизированного вождения. При неприближении к секции автоматизированного вождения, процесс возвращается к этапу S109, чтобы непрерывно выполнять вождение вручную и накапливать данные. При приближении к секции автоматизированного вождения, процесс переходит к этапу S117.
[0037] На этапе S117, модуль 23 оценки характеристик вождения оценивает то, накоплены или нет части данных параметров каждого из окружений при движении и состояний движения как указанные минимальные числа. Например, как проиллюстрировано на фиг. 10, в случае состояния B1 движения, оценивается то, равно или нет число накопленных частей данных о параметре скорости минимуму, т.е. 100 или больше. Тем не менее, можно не использовать данные, накопленные сразу после начала движения транспортного средства, например, в пределах четвертого предварительно определенного времени после начала движения. Если число частей данных, накопленных, по меньшей мере, для одного параметра, по меньшей мере, одного окружения при движении или состояния движения равно минимуму или больше, этап S119 выполняется. С другой стороны, если число накопленных частей данных для любого параметра любого окружения при движении или состояния движения меньше минимума, этап S127 выполняется.
[0038] На этапе S119, модуль 23 оценки характеристик вождения считывает опорные характеристики вождения, заранее сохраненные в модуле 25 хранения опорных характеристик вождения. Подробнее, модуль 23 оценки характеристик вождения считывает средние значения и среднеквадратические отклонения опорных характеристик вождения окружений при движении и состояний движения. Опорные характеристики вождения выражаются с помощью распределения вероятностей, как проиллюстрировано на фиг. 11, причем распределение вероятностей формируется и сохраняется для каждого параметра каждого окружения при движении и состояния движения. Например, фиг. 11 представляет собой опорные характеристики для окружения S1 при движении "шоссе" и состояния B1 движения "движение в режиме оптимального регулирования скорости", при этом параметр представляет собой скорость V.
[0039] На этапе S121, модуль 23 оценки характеристик вождения использует данные, накопленные во время текущей поездки, чтобы вычислять статистику характеристик вождения текущей поездки. Числа частей данных, используемых в это время, составляют числа, проиллюстрированные на фиг. 10. Например, в случае состояния B1 движения, используются максимум 10000 частей данных. Модуль 23 оценки характеристик вождения вычисляет среднее значение и среднеквадратическое отклонение σ каждого параметра каждого из окружений при движении и состояний движения в текущей поездке и находит позицию распределения, которая указывает отклонение вычисленного среднего значения от среднего значения опорных характеристик вождения. Например, как проиллюстрировано на фиг. 11, среднее значение A1 в текущей поездке может находиться в позиции распределения в +1,5σ опорных характеристик вождения. Аналогично, среднее значение A2 в текущей поездке находится в позиции распределения в +0.5σ, и среднее значение A3 в текущей поездке находится в позиции распределения в -1,5σ. Модуль 23 оценки характеристик вождения находит позицию распределения таким способом для каждого параметра каждого из окружений при движении и состояний движения.
[0040] Если имеется параметр, части данных которого не накапливаются вплоть до минимального числа, параметр, части данных которого накапливаются до минимального числа, собирается, чтобы находить его позицию распределения, и согласно найденной позиции распределения, задается позиция распределения параметра, части данных которого не накапливаются до минимального числа. Например, если параметр скорости имеет накопленные части данных, и его позиция распределения составляет +1,5σ, параметр времени проезда расстояния между движущимися в потоке транспортными средствами задается в позиции распределения +1,5σ, даже если число частей данных, накопленных для времени проезда расстояния между движущимися в потоке транспортными средствами, меньше минимума. Это возможно, поскольку параметры имеют корреляцию. Например, если водитель осуществляет вождение транспортного средства в спешке, имеется корреляция в том, что скорость выше нормальной, время проезда расстояния между движущимися в потоке транспортными средствами относительно едущего впереди транспортного средства меньше нормального, и ускорение является высоким. Наоборот, если водитель медленно осуществляет вождение транспортного средства, имеется корреляция в том, что скорость ниже нормальной, время проезда расстояния между движущимися в потоке транспортными средствами больше нормального, и ускорение является низким. Соответственно, для параметра, данные которого не накапливаются, можно задавать его позицию распределения согласно корреляции. Если множество параметров имеют различные позиции распределения, среднее значение позиций распределения может находиться и применяться к параметру, данные которого не накапливаются. Например, если множество параметров имеют позиции распределения в +1,4σ, +1σ, +0,8σ и +1,2σ, среднее значение в +1,1σ может задаваться для такого параметра. Таким образом, даже если все параметры всех окружений при движении и состояний движения не имеют минимальных чисел частей данных, статистика текущей поездки может задаваться.
[0041] Дополнительно, модуль 23 оценки характеристик вождения может использовать, если время, в течение которого вождение вручную выполняется в текущей поездке, превышает второе предварительно определенное время, данные, накопленные в пределах третьего предварительно определенного времени перед временной точкой, в которой вождение вручную переключается на автоматизированное вождение. Например, как проиллюстрировано на фиг. 12, если вождение вручную выполняется в течение времени, которое является достаточно большим для того, чтобы накапливать данные, можно использовать данные, накопленные в пределах третьего предварительно определенного времени перед временной точкой, в которой вождение вручную переключается на автоматизированное вождение, и находить характеристики вождения для вождения вручную в текущей поездке. Вследствие этого, данные непосредственно перед переключением на автоматизированное вождение могут использоваться. Соответственно, второе предварительно определенное время задается равным времени, чтобы накапливать данные, которые являются достаточными для того, чтобы оценивать характеристики вождения для вождения вручную. Третье предварительно определенное время задается равным времени, чтобы обеспечивать части данных, требуемые для оценки характеристик вождения для вождения вручную, и меньше второго предварительно определенного времени.
[0042] На этапе S123, модуль 27 определения характеристик вождения сравнивает характеристики вождения текущей поездки с опорными характеристиками вождения и оценивает то, имеется или нет предварительно определенное отклонение между характеристиками вождения текущей поездки и опорными характеристиками вождения. Более точно, модуль 27 определения характеристик вождения сравнивает статистику текущей поездки со статистикой опорных характеристик вождения. Например, если позиция распределения текущей поездки превышает опорные характеристики вождения на ±1σ, оценивается то, что имеется предварительно определенное отклонение, а если она меньше ±1σ, оценивается то, что отсутствует предварительно определенное отклонение. Соответственно, на фиг. 11, если среднее значение текущей поездки составляет A1 или A3, оценивается то, что имеется отклонение, а если оно составляет A2, оценивается то, что отсутствует отклонение. Если имеется предварительно определенное отклонение между характеристиками вождения текущей поездки и опорными характеристиками вождения, процесс переходит к этапу S125, а если отсутствует отклонение между характеристиками вождения текущей поездки и опорными характеристиками вождения, к этапу S127.
[0043] На этапе S125, модуль 27 определения характеристик вождения задает, согласно характеристикам вождения текущей поездки, характеристики вождения, применяемые к автоматизированному вождению. Характеристики вождения, применяемые к автоматизированному вождению, задаются в пределах предварительно определенного диапазона опорных характеристик вождения. Например, как проиллюстрировано на фиг. 13, на котором параметр представляет собой скорость, верхнее предельное значение MAX задается равным +1σ, и нижнее предельное значение MIN задается равным -2σ, и в пределах диапазона между верхним предельным значением MAX и нижним предельным значением MIN, задаются характеристики вождения, применяемые к автоматизированному вождению. Соответственно, если характеристики вождения текущей поездки составляют X1, характеристики вождения автоматизированного вождения определяются таким образом, что среднее значение X1 становится равным верхнему предельному значению MAX. При автоматизированном вождении, чрезвычайно быстрое вождение, которое может превышать +1σ, снижает безопасность, и в силу этого характеристики вождения задаются равными +1σ или ниже, что немного быстрее, чем нормальный режим. С другой стороны, если характеристики вождения текущей поездки составляют X2, характеристики вождения автоматизированного вождения задаются таким образом, что среднее значение X2 равно нижнему предельному значению MIN. При автоматизированном вождении, чрезвычайно медленное вождение, равное -2σ или ниже, может затруднять трафик, и в силу этого характеристики вождения задаются равными -2σ или более, т.е. медленнее нормального режима, чтобы обеспечивать плавный трафик. Если среднее значение характеристик вождения текущей поездки равно или выше -2σ и ниже -1σ, характеристики вождения текущей поездки могут применяться как есть к автоматизированному вождению. Диапазон стороны нижнего предельного значения MIN задается таким образом, что он шире диапазона стороны верхнего предельного значения MAX с учетом безопасности. Технология задания характеристик вождения, проиллюстрированная на фиг. 13, также является применимой, когда расстояние между транспортными средствами, ускорение, время торможения и т.п. служит в качестве параметра.
[0044] Дополнительно, в дальнейшем поясняется технология задания характеристик вождения, когда временной промежуток служит в качестве параметра. Во-первых, данные временного промежутка в начальной точке правого поворота на перекрестке, проиллюстрированном на фиг. 4, и данные временного промежутка в точке въезда на перекресток со знаком остановки, проиллюстрированным на фиг. 5, соответственно, накапливаются. Оценка, которая должна выполняться водителем при повороте направо на перекрестке, представляет собой выполнение правого поворота или выдерживание паузы перед правым поворотом. Оценка, которая должна выполняться водителем при въезде на перекресток со знаком остановки, должна представлять собой выполнение въезда и выдерживание паузы перед въездом. Фиг. 14 является видом, иллюстрирующим пример временного промежутка, накопленного для каждой оценки, выполненной при правом повороте на перекрестке. Как проиллюстрировано на фиг. 14, Tga представляет собой временной промежуток, когда водитель выполняет правый поворот, и Tgr представляет собой временной промежуток, когда водитель выдерживает паузу перед правым поворотом. Эти временные промежутки накапливаются, чтобы получать кумулятивные частотные распределения соответствующим образом. Временной промежуток, в который кумулятивная частота временного промежутка Tga для выполнения правого поворота равна кумулятивной частоте временного промежутка Tgr для выдерживания паузы перед правым поворотом (выполнение в 50% и выдерживание в 50%), представляет собой критический временной промежуток Y, который составляет приблизительно шесть секунд на фиг. 14.
[0045] Согласно этому результату, определяется нижнее предельное значение для временного промежутка для выполнения правого поворота характеристик вождения, применяемых к автоматизированному вождению. Например, если нижнее предельное значение временного промежутка задается равным критическому временному промежутку в шесть секунд, автоматизированное вождение всегда выполняет правый поворот во временной промежуток, в который водитель обычно выполняет правый поворот, или больше, так что водитель может испытывать ощущение безопасности. Если оценивается то, что вождение в текущей поездке выполняется больше в спешке, чем в нормальном режиме, нижнее предельное значение временного промежутка для выполнения правого поворота автоматизированного вождения немного снижается по сравнению с критическим временным промежутком. Например, оно задается в качестве точки, в которой выполнение правого поворота составляет 40%, а выдерживание паузы перед правым поворотом составляет 60% (приблизительно пять секунд на фиг. 14). В таком случае вождения в спешке, нижнее предельное значение временного промежутка снижается, чтобы ослаблять чувство безотлагательности водителя.
[0046] С другой стороны, если оценивается то, что вождение в текущей поездке выполняется медленнее, чем в обычном режиме, нижнее предельное значение временного промежутка для выполнения правого поворота автоматизированного вождения немного увеличивается относительно критического временного промежутка. Например, оно задается в качестве точки, в которой выполнение правого поворота составляет 60%, а выдерживание паузы перед правым поворотом составляет 40% (приблизительно семь секунд на фиг. 14). В таком случае медленного вождения, нижнее предельное значение временного промежутка увеличивается, чтобы вызывать у водителя ощущение наличия достаточного количества времени.
[0047] Если параметр представляет собой расстояние до едущего сзади сбоку транспортного средства, время до едущего сзади сбоку транспортного средства, расстояние между транспортными средствами и время до обгона другого транспортного средства либо расстояние сбоку до припаркованного или остановленного транспортного средства, характеристики вождения могут задаваться аналогично случаю временного промежутка. Здесь, в качестве примера поясняется расстояние до едущего сзади сбоку транспортного средства. Во-первых, данные относительно расстояния до едущего сзади сбоку транспортного средства накапливаются и, согласно накопленным данным и аналогично временному промежутку, нижний предел расстояния до едущего сзади сбоку транспортного средства задается для случая, когда транспортное средство въезжает в пределы полосы движения или сменяет полосу движения. Если оценивается то, что вождение в текущей поездке выполняется больше в спешке, чем в обычном режиме, нижний предел расстояния до едущего сзади сбоку транспортного средства для случая въезда в пределы или смены полосы движения автоматизированного вождения уменьшается. Это может ослаблять чувство безотлагательности водителя.
[0048] С другой стороны, если оценивается то, что вождение в текущей поездке выполняется медленнее, чем в обычном режиме, нижнее предельное значение расстояния до едущего сзади сбоку транспортного средства для случая въезда в пределы или смены полосы движения увеличивается. Это вызывает у водителя ощущение наличия достаточного количества времени. Другие параметры могут аналогично задаваться.
[0049] На этапе S127, модуль 27 определения характеристик вождения задает опорные характеристики вождения в качестве характеристик вождения, применяемых к автоматизированному вождению. Если характеристики вождения текущей поездки меньше ±1σ, считается, что водитель находится в обычном состоянии, и в силу этого опорные характеристики вождения применяются к автоматизированному вождению.
[0050] На этапе S129, модуль 29 выполнения управления автоматизированным вождением определяет, согласно окружающим условиям, распознанным через модуль 21 получения информации, поведение транспортного средства во время движения и выполняет автоматизированное вождение согласно характеристикам вождения, определенным на этапе S125 или S127. В это время, характеристики вождения могут регулироваться согласно тому, имеется или нет пассажир в транспортном средстве, либо согласно атрибутам пассажира. То, имеется или нет пассажир, обнаруживается с помощью датчика давления, размещаемого на сиденье, либо камеры или сонара, размещаемой в транспортном средстве. Атрибуты пассажира представляют собой "пожилой человек", "ребенок", "женщина" и т.п., которые идентифицируются посредством веса, определенного с помощью датчика, размещаемого на сиденье, либо посредством камеры или сонара, размещаемой в транспортном средстве. Кроме того, возможно то, что водитель вводит то, имеется или нет пассажир, и атрибуты пассажира. Можно идентифицировать присутствие пассажира или свойства пассажира из устройства связи, такого как смартфон. Если имеется пассажир, который является пожилым человеком, ребенком или беременной женщиной, модуль 29 выполнения управления автоматизированным вождением регулирует характеристики вождения для того, чтобы снижать скорость, увеличивать расстояние между транспортными средствами, уменьшать ускорение и ускорять время торможения.
[0051] Кроме того, можно регулировать характеристики вождения согласно физическому состоянию водителя. Физическое состояние водителя может представлять собой степень пробуждения или степень утомления, которая оценивается согласно номинальному времени закрытых глаз посредством обнаружения состояния открытых/закрытых глаз из изображения лица водителя, сфотографированного с помощью камеры. Дополнительно, степень утомления может оцениваться с помощью импульсно-волнового измерительного устройства в виде наручных часов или с присоединением на кончике пальца. Чем ниже степень пробуждения или чем выше степень утомления, тем меньшую скорость, тем большее расстояние между транспортными средствами, тем более низкое ускорение и меньшее время торможения задает модуль 29 выполнения управления автоматизированным вождением посредством регулирования характеристик вождения.
[0052] Также можно регулировать характеристики вождения согласно требуемому времени прибытия в пункт назначения, введенный человеком, занимающим место в транспортном средстве, транспортного средства. Требуемое время прибытия вводится, к примеру, 30 минут с этого момента до прибытия в пункт назначения либо прибытие до 14:00 в пункт назначения. Если человек, занимающий место в транспортном средстве, указывает требуемое время прибытия, модуль 29 выполнения управления автоматизированным вождением выясняет, проезжало или нет транспортное средство по идентичному маршруту и в идентичный пункт назначения в прошлом. Если транспортное средство проезжало таким образом, выясняется то, указывает или нет человек, занимающий место в транспортном средстве, требуемое время прибытия в этом случае. Если требуемое время прибытия указано в прошлом, обнаруживается то, составляет требуемое время прибытия в этот раз раньше или позже предыдущего требуемого времени прибытия, и характеристики вождения регулируются соответствующим образом. Например, если требуемое время прибытия в этот раз составляет раньше предыдущего требуемого времени прибытия, характеристики вождения регулируются таким образом, чтобы увеличивать верхние предельные значения для средней скорости и ускорения. С другой стороны, если требуемое время прибытия в этот раз составляет позже предыдущего требуемого времени прибытия, характеристики вождения регулируются таким образом, чтобы снижать верхние предельные значения средней скорости и ускорения.
[0053] На этапе S131, модуль 29 выполнения управления автоматизированным вождением оценивает то, прибывает или нет транспортное средство в место назначения. Если транспортное средство не прибывает в место назначения, этап S133 выполняется, а если транспортное средство прибывает в место назначения, процесс определения характеристик вождения согласно варианту осуществления завершается.
[0054] На этапе S133, модуль 25 хранения опорных характеристик вождения обновляет опорные характеристики вождения посредством отражения данных относительно вождения вручную в текущей поездке в них и сохраняет обновленные опорные характеристики вождения. Затем процесс возвращается к этапу S105, чтобы непрерывно выполнять вышеуказанный процесс определения характеристик вождения.
[0055] Преимущество первого варианта осуществления
Как подробно пояснено выше, способ управления вождением и устройство для этого согласно варианту осуществления сравнивают характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с опорными характеристиками вождения. Если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, характеристики вождения, применяемые к автоматизированному вождению, задаются согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке. Вследствие этого, если человек, занимающий место в транспортном средстве, проводит, в текущей поездке, вождение вручную, отличающееся от обычного вождения вручную, характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке отражаются, до характеристик вождения человека, занимающего место в транспортном средстве, предыдущего вождения вручную, в автоматизированном вождении. Соответственно, автоматизированное вождение может выполняться согласно характеристикам вождения, требуемым для текущей поездки человеком, занимающим место в транспортном средстве, транспортного средства.
[0056] Согласно способу управления вождением и устройству для этого по варианту осуществления, данные относительно вождения вручную в предыдущей поездке транспортного средства накапливаются, и согласно накопленным данным, опорные характеристики вождения задаются. Вследствие этого, характеристики вождения, близкие к обычному вождению вручную, проводимому человеком, занимающим место в транспортном средстве, транспортного средства, могут задаваться в качестве опорных характеристик вождения. Соответственно, если отклонение от опорных характеристик вождения возникает, следует понимать, что человек, занимающий место в транспортном средстве, хочет характеристик вождения, отличающихся от обычных характеристик вождения, и в силу этого можно корректно оценивать намерение человека, занимающего место в транспортном средстве.
[0057] Дополнительно, согласно способу управления вождением и устройству для этого по варианту осуществления, когда вождение вручную переключается на автоматизированное вождение, характеристики вождения, выбранные человеком, занимающим место в транспортном средстве, транспортного средства, отображаются на дисплее транспортного средства. Вследствие этого, характеристики вождения, выбранные при переключении вождения вручную на автоматизированное вождение, могут подтверждаться, и в силу этого чувство защищенности человека, занимающего место в транспортном средстве, транспортного средства улучшается.
[0058] Кроме того, согласно способу управления вождением и устройству для этого по варианту осуществления, если время, в течение которого вождение вручную выполняется в текущей поездке, превышает второе предварительно определенное время, данные, накопленные в третье предварительно определенное время до момента времени переключения на автоматизированное вождение, используются для того, чтобы оценивать характеристики вождения. Вследствие этого, можно оценивать характеристики вождения текущей поездки посредством использования данных непосредственно перед переключением на автоматизированное вождение. В частности, когда время вождения вручную является большим, характеристики вождения для вождения вручную могут отличаться между первой половиной и второй половиной. Чтобы разрешать это, данные непосредственно перед переключением на автоматизированное вождение используются для того, чтобы оценивать характеристики вождения, за счет этого подавляя изменения характеристик вождения и реализуя плавное переключение на автоматизированное вождение.
[0059] Помимо этого, согласно способу управления вождением и устройству для этого по варианту осуществления, оценка характеристик вождения текущей поездки не использует данные, накопленные в пределах четвертого предварительно определенного времени после начала движения транспортного средства. Вследствие этого, данные в течение периода сразу после начала движения, в который характеристики вождения являются нестабильными, могут исключаться, и в силу этого, характеристики вождения текущей поездки могут корректно оцениваться. В частности, характеристики вождения сразу после начала движения практически не вызывают отклонение от опорных характеристик вождения, и в силу этого использование данных, полученных после истечения четвертого предварительно определенного времени, позволяет легко идентифицировать отклонение от опорных характеристик вождения.
[0060] Кроме того, согласно способу управления вождением и устройству для этого по варианту осуществления, характеристики вождения, применяемые к автоматизированному вождению, регулируются согласно, по меньшей мере, одному из присутствия пассажира в транспортном средстве и атрибутов пассажира. Вследствие этого, характеристики вождения, соответствующие пассажиру, могут предоставляться для автоматизированного вождения.
[0061] Кроме того, согласно способу управления вождением и устройству для этого по варианту осуществления, человек, занимающий место в транспортном средстве, транспортного средства регулирует характеристики вождения, применяемые к автоматизированному вождению, согласно требуемому времени прибытия в требуемый пункт назначения. Вследствие этого, характеристики вождения, удовлетворяющие намерению человека, занимающего место в транспортном средстве, транспортного средства, могут предоставляться для автоматизированного вождения.
[0062] Кроме того, согласно способу управления вождением и устройству для этого по настоящему изобретению, характеристики вождения, применяемые к автоматизированному вождению, регулируются в зависимости от физического состояния водителя транспортного средства. Вследствие этого, характеристики вождения, соответствующие физическому состоянию водителя транспортного средства, могут предоставляться для автоматизированного вождения.
[0063] Кроме того, согласно способу управления вождением и устройству для этого по варианту осуществления, данные относительно вождения вручную транспортного средства накапливаются на сервере за пределами транспортного средства. Это исключает необходимость накапливания данных в транспортном средстве, за счет этого уменьшая емкость устройства хранения данных, установленного в транспортном средстве.
[0064] Помимо этого, согласно способу управления вождением и устройству для этого по варианту осуществления, характеристики вождения, применяемые к автоматизированному вождению, задаются в пределах предварительно определенного диапазона опорных характеристик вождения. Это предотвращает то, что характеристики вождения автоматизированного вождения становятся экстремальными характеристиками, и предоставляет человеку, занимающему место в транспортном средстве, транспортного средства чувство защищенности.
[0065] Кроме того, согласно способу управления вождением и устройству для этого по варианту осуществления, накапливаются данные относительно скорости транспортного средства, расстояния между транспортными средствами, времени проезда расстояния между движущимися в потоке транспортными средствами или относительной скорости между транспортным средством и едущим впереди транспортным средством, времени торможения транспортного средства и ускорения транспортного средства. Помимо этого, накапливаются данные относительно временного промежутка между транспортным средством и встречным или пересекающимся транспортным средством, расстояния или времени между транспортным средством и едущим сзади сбоку транспортным средством и расстояния сбоку между транспортным средством и припаркованным или остановленным транспортным средством. Вследствие этого, в различных окружениях при движении и состояниях движения, характеристики вождения текущей поездки могут оцениваться.
[0066] Кроме того, согласно способу и устройству управления вождением по варианту осуществления, запрос от человека, занимающего место в транспортном средстве, транспортного средства принимается через операцию переключения на то, чтобы регулировать характеристики вождения, применяемые к автоматизированному вождению. Это обеспечивает возможность регулирования характеристик вождения автоматизированного вождения до характеристик вождения, требуемых человеком, занимающим место в транспортном средстве, транспортного средства.
[0067] Дополнительно, согласно способу управления вождением и устройству для этого по варианту осуществления, предыстория операций для операций переключения человека, занимающего место в транспортном средстве, транспортного средства накапливается в качестве данных для того, чтобы оценивать характеристики вождения текущей поездки. Это обеспечивает возможность отражения намерения водителя в оценке характеристик вождения текущей поездки.
[0068] Второй вариант осуществления
В дальнейшем в этом документе, поясняется второй вариант осуществления согласно настоящему изобретению со ссылкой на чертежи. Процесс определения характеристик вождения по этому варианту осуществления отличается от процесса определения характеристик вождения по первому варианту осуществления в том, что если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, опорные характеристики вождения применяются, чтобы выполнять автоматизированное вождение. Соответственно, процесс определения характеристик вождения по этому варианту осуществления, проиллюстрированный на фиг. 15, добавляет процесс этапа S201, и это отличается от процесса определения характеристик вождения первого варианта осуществления, проиллюстрированного на фиг. 8. Структура системы управления вождением и этапы обработки, отличные от этапа S201 по варианту осуществления, являются идентичными структуре и этапам по первому варианту осуществления, и в силу этого их подробные пояснения опускаются.
[0069] В дальнейшем в этом документе, поясняется процесс этапа S201, который отличается от первого варианта осуществления. На этапе S201, модуль 29 выполнения управления автоматизированным вождением оценивает то, находится или нет время, в течение которого вождение вручную выполняется в текущей поездке, в пределах первого предварительно определенного времени. Если время выполнения вождения вручную является слишком коротким, невозможно накапливать данные, достаточные для того, чтобы оценивать характеристики вождения для вождения вручную. Чтобы разрешать это, оценивается то, находится или нет время выполнения вождения вручную в пределах первого предварительно определенного времени, за счет этого оценивая то, накоплены или нет данные, необходимые для оценки характеристик вождения для вождения вручную. Соответственно, первое предварительно определенное время задается равным времени, в которое данные для того, чтобы оценивать характеристики вождения для вождения вручную, не накапливаются в достаточной степени. Если время выполнения вождения вручную превышает первое предварительно определенное время, этап S117 выполняется, а если оно находится в пределах первого предварительно определенного времени, этап S127 выполняется. А именно, если время выполнения вождения вручную является слишком коротким, чтобы накапливать достаточные данные для того, чтобы оценивать характеристики вождения для вождения вручную, этап S127 выполняется для того, чтобы применять опорные характеристики вождения к характеристикам вождения автоматизированного вождения.
[0070] Если время выполнения вождения вручную находится в пределах первого предварительно определенного времени, регулирование может осуществляться, чтобы задерживать начало автоматизированного вождения до тех пор, пока не истечет первое предварительно определенное время. Как проиллюстрировано на фиг. 16, если секция вождения вручную находится в пределах первого предварительно определенного времени, начало автоматизированного вождения задерживается до тех пор, пока не пройдет первое предварительно определенное время, за счет этого расширяя секцию вождения вручную и обеспечивая время для накопления данных. В это время, можно управлять с возможностью предоставлять сообщение, такое как "Продолжить вождение вручную еще немного времени?", и получать подтверждение человека, занимающего место в транспортном средстве, транспортного средства.
[0071] Преимущество второго варианта осуществления
Как подробно пояснено выше, способ управления вождением и устройство для этого по этому варианту осуществления выполняют автоматизированное вождение посредством применения опорных характеристик вождения к означенному, если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени. Вследствие этого, если время выполнения вождения вручную является слишком коротким для того, чтобы накапливать достаточные данные, автоматизированное вождение выполняется согласно характеристикам обычного вождения для того, чтобы вызывать у водителя чувство защищенности.
[0072] Третий вариант осуществления
В дальнейшем в этом документе, поясняется третий вариант осуществления согласно настоящему изобретению со ссылкой на чертежи. Процесс определения характеристик вождения по этому варианту осуществления отличается от процесса определения характеристик вождения по второму варианту осуществления в том, что он инструктирует человеку, занимающему место в транспортном средстве, транспортного средства выбирать, если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, характеристики вождения текущей поездки или опорные характеристики вождения, и приспосабливает выбранные характеристики вождения для того, чтобы выполнять автоматизированное вождение. Соответственно, процесс определения характеристик вождения по этому варианту осуществления, проиллюстрированный на фиг. 17, добавляет процесс этапа S301, и это отличается от процесса определения характеристик вождения по второму варианту осуществления, проиллюстрированного на фиг. 15. Структура системы управления вождением и этапы, отличные от этапа S301 по этому варианту осуществления, являются идентичными структуре и этапам по второму варианту осуществления, и в силу этого их подробные пояснения опускаются.
[0073] В дальнейшем в этом документе, поясняется процесс этапа S301, который отличается от второго варианта осуществления. На этапе S201, если оценивается то, что время выполнения вождения вручную в текущей поездке находится в пределах первого предварительно определенного времени, модуль 29 выполнения управления автоматизированным вождением запрашивает человека, занимающего место в транспортном средстве, транспортного средства, на этапе S301, в отношении того, должны или нет применяться опорные характеристики вождения. Например, представляется сообщение, чтобы инструктировать человека, занимающего место в транспортном средстве, транспортного средства выбирать то, должны или нет применяться характеристики вождения текущей поездки, либо то, должны или нет применяться характеристики вождения предыдущей поездки. Если опорные характеристики вождения не выбираются, и характеристики вождения текущей поездки выбираются, этап S117 выполняется, а если опорные характеристики вождения выбираются, этап S127 выполняется. После этого, при переключении на автоматизированное вождение, выбранные характеристики вождения отображаются на дисплее 11.
[0074] Преимущество третьего варианта осуществления
Как подробно пояснено выше, способ управления вождением и устройство для этого согласно этому варианту осуществления инструктируют человеку, занимающему место в транспортном средстве, транспортного средства выбирать характеристики вождения текущей поездки или опорные характеристики вождения, если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, и выполняет автоматизированное вождение посредством применения выбранных характеристик вождения к нему. Вследствие этого, даже если время выполнения вождения вручную является слишком коротким для того, чтобы накапливать достаточные данные, автоматизированное вождение может выполняться согласно характеристикам вождения, требуемым человеком, занимающим место в транспортном средстве, транспортного средства.
[0075] В вышеуказанных вариантах осуществления, период для выполнения автоматизированного вождения задается. Варианты осуществления являются применимыми, когда период для выполнения автоматизированного вождения не задается, и автоматизированное вождение начинается по запросу, выполняемому человеком, занимающем место в транспортном средстве. Когда период для выполнения автоматизированного вождения не задается, и автоматизированное вождение начинается по запросу, выполняемому человеком, занимающим место в транспортном средстве, можно оценивать, в начале автоматизированного вождения, то, представляют собой характеристики вождения, которые должны применяться, характеристики вождения текущей поездки или опорные характеристики вождения. В комбинации с вышеуказанными вариантами осуществления, можно применять к случаю, в котором период для выполнения автоматизированного вождения не задается, и автоматизированное вождение начинается в ответ на запрос, выполняемый человеком, занимающем место в транспортном средстве.
[0076] Согласно вариантам осуществления, относительно характеристик вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке, не всегда обязательно, чтобы человек, занимающий место в транспортном средстве, управлял всеми объектами управления транспортного средства. Можно обнаруживать характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке из числа объектов управления, которые управляются человеком, занимающем место в транспортном средстве. А именно, только для объекта управления, управляемого человеком, занимающим место в транспортном средстве, характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке могут сравниваться с опорными характеристиками вождения, и если отклонение возникает между ними, характеристики вождения, применяемые к автоматизированному вождению, могут задаваться для объекта управления, управляемого человеком, занимающим место в транспортном средстве, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке.
[0077] Вышеуказанные варианты осуществления представляют собой примеры настоящего изобретения. Соответственно, настоящее изобретение не ограничено вышеуказанными вариантами осуществления, и любые конфигурации, отличные от вариантов осуществления, либо различные модификации, которые должны вноситься в зависимости от проектных решений, естественно, попадают в пределы объема настоящего изобретения без отступления от технической идеи настоящего изобретения.
Описание ссылок с номерами
[0078] 1 - устройство управления вождением
3 - модуль обнаружения состояний движения
5 - модуль обнаружения окружающих условий
7 - переключатель смены режима вождения
9 - модуль регулирования характеристик вождения
11 - дисплей
13 - модуль отображения состояния управления
15 - модуль управления исполнительным устройством
17 - Исполнительное устройства
21 - модуль получения информации
23 - модуль оценки характеристик вождения
25 - модуль хранения опорных характеристик вождения
27 - модуль определения характеристик вождения
29 - модуль выполнения управления автоматизированным вождением
50 - транспортное средство
51 - CAN
53 - навигационное устройство
55 - камера
57 - лазерный радар
59 - устройство связи
61 - сервер
100 - система управления вождением
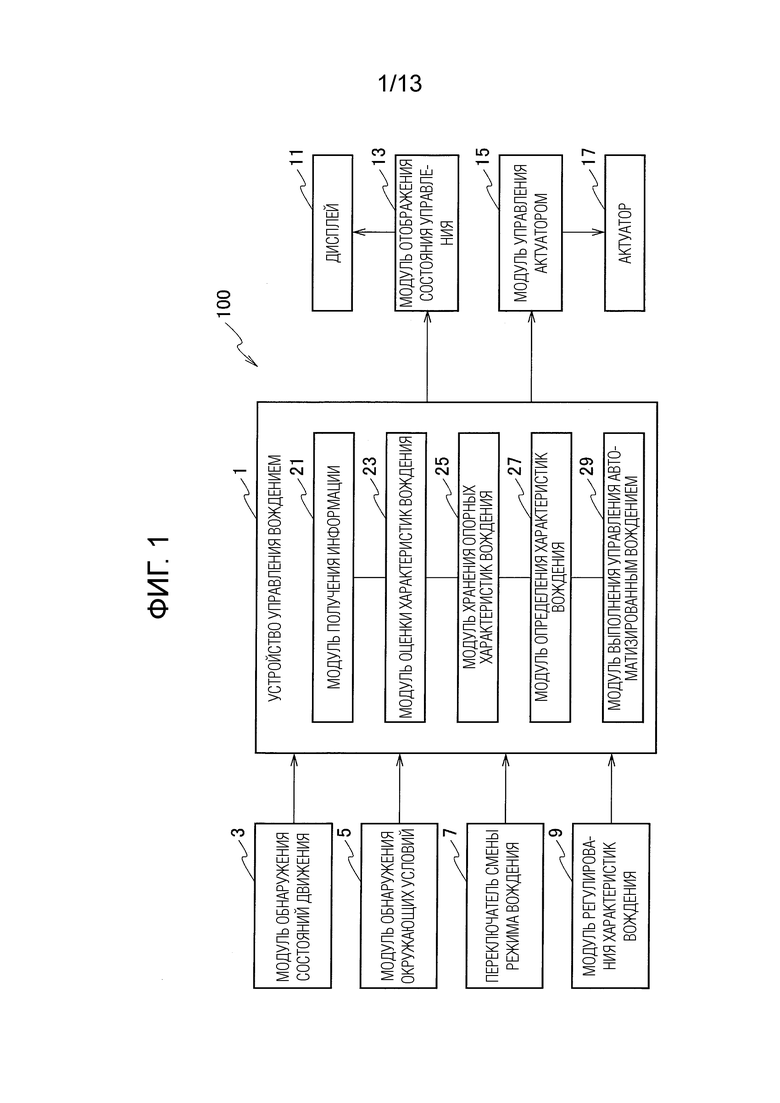
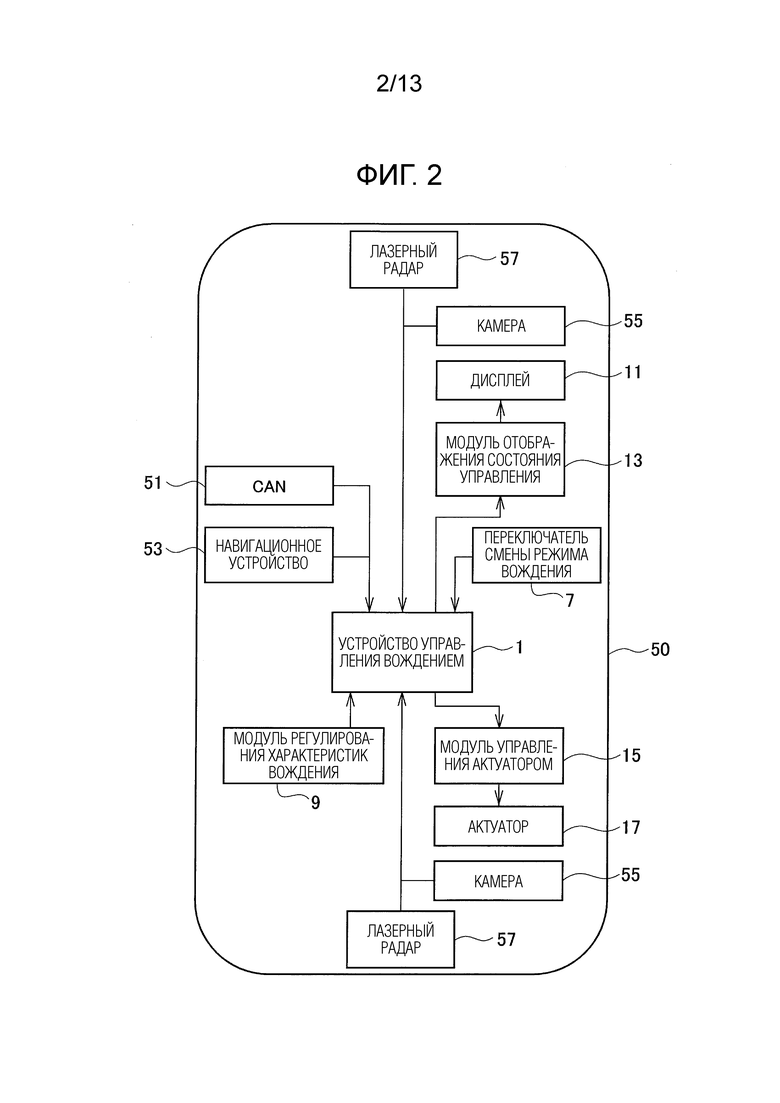
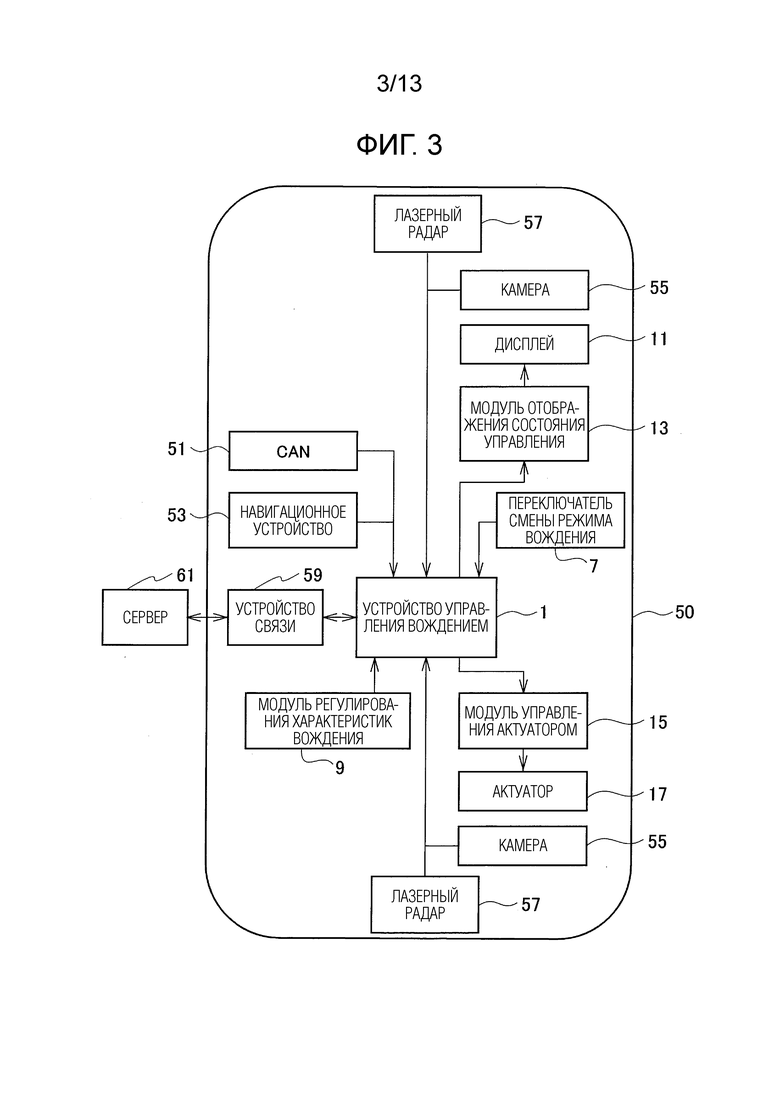
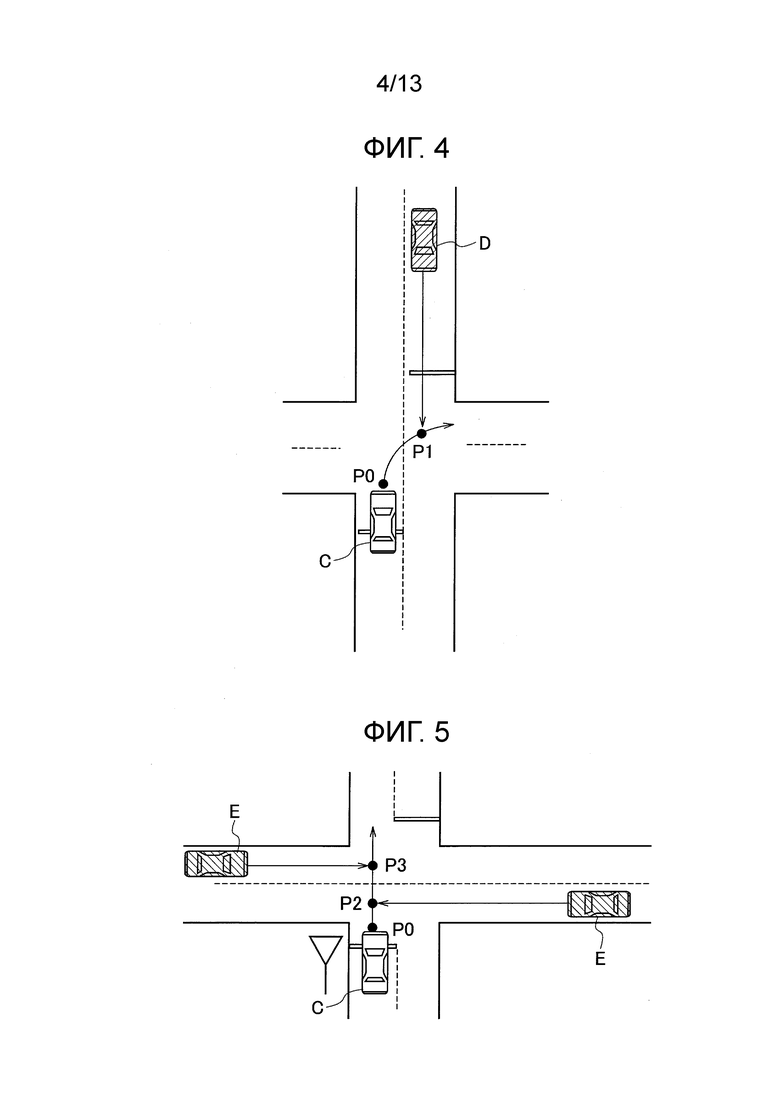
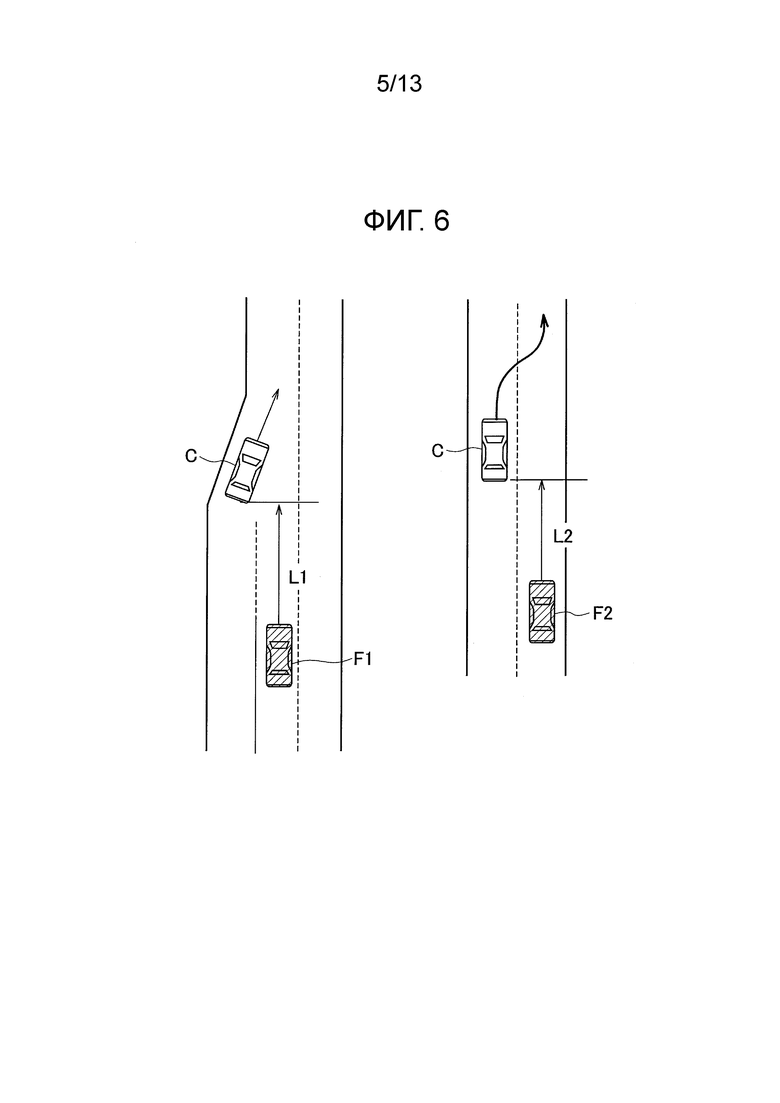
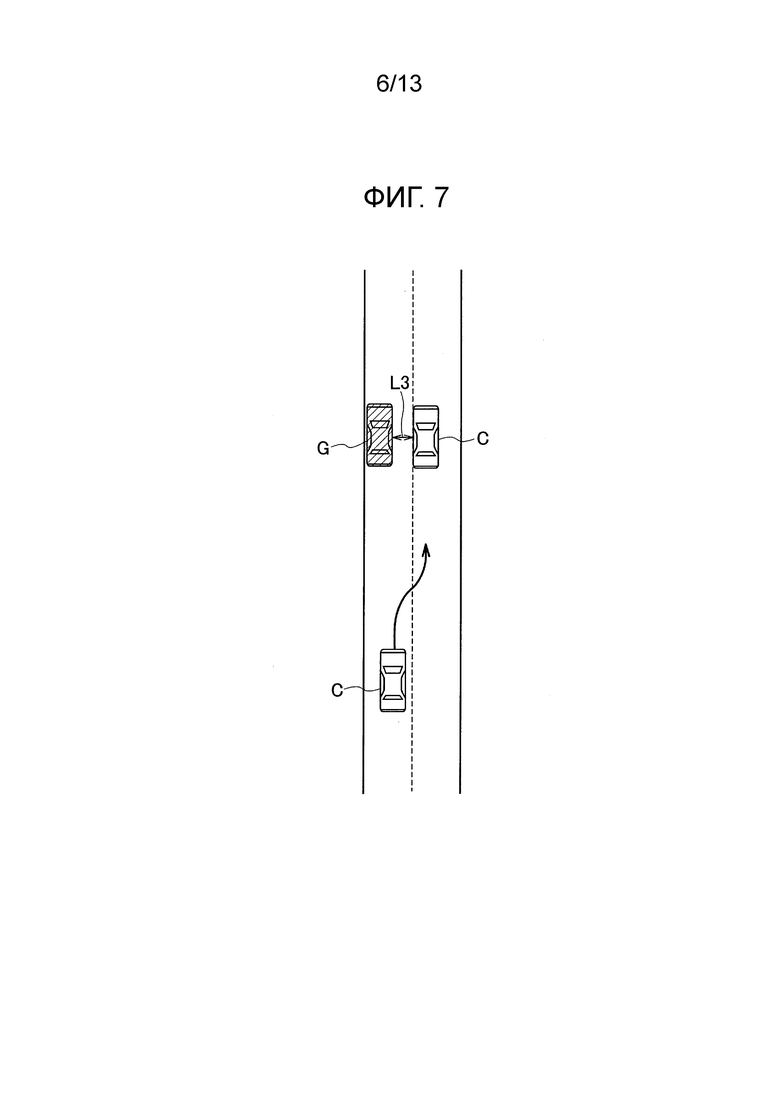
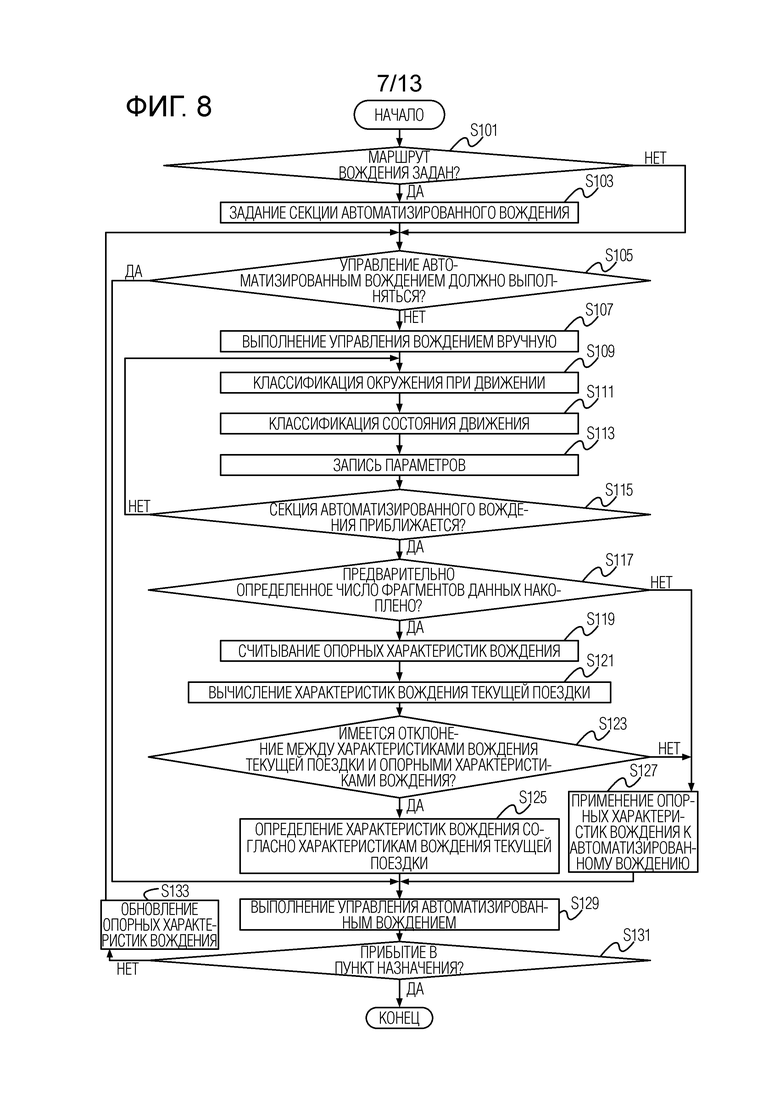
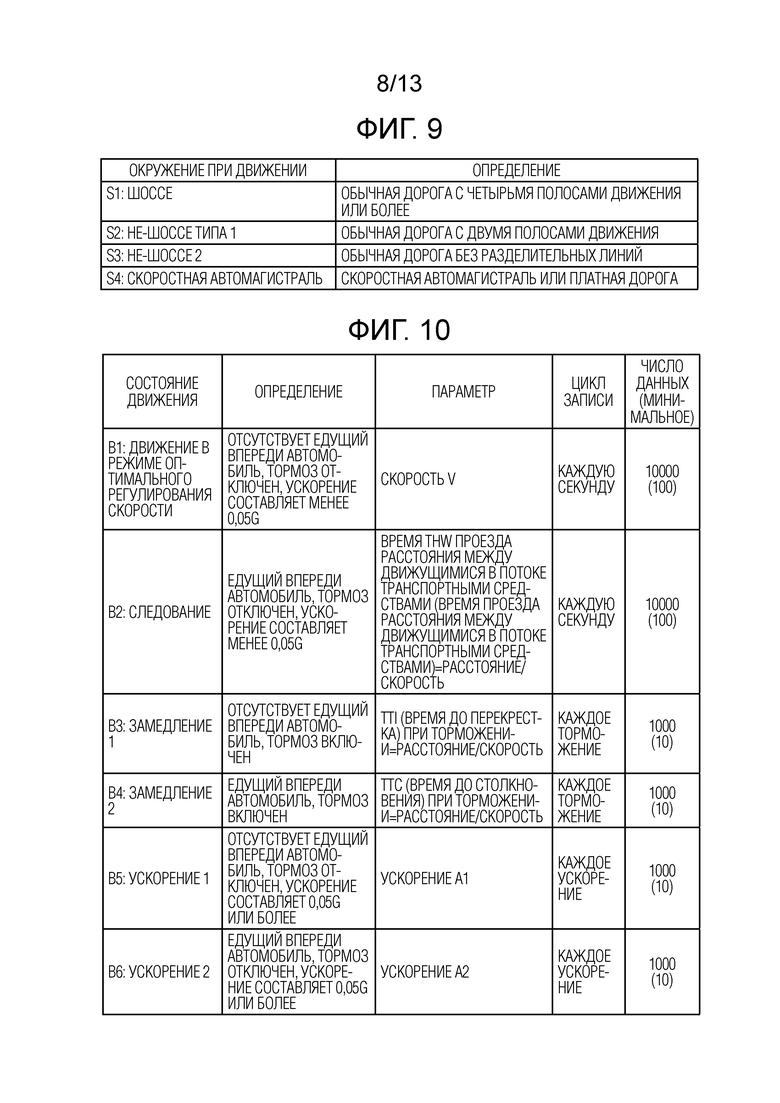
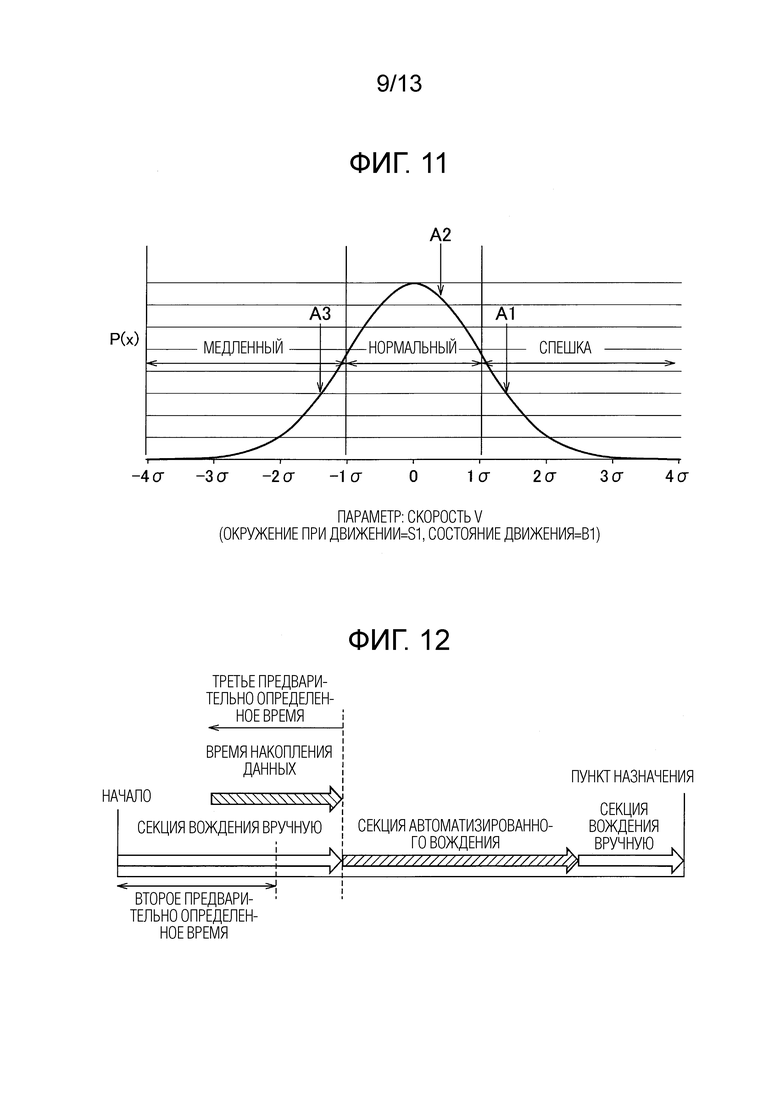
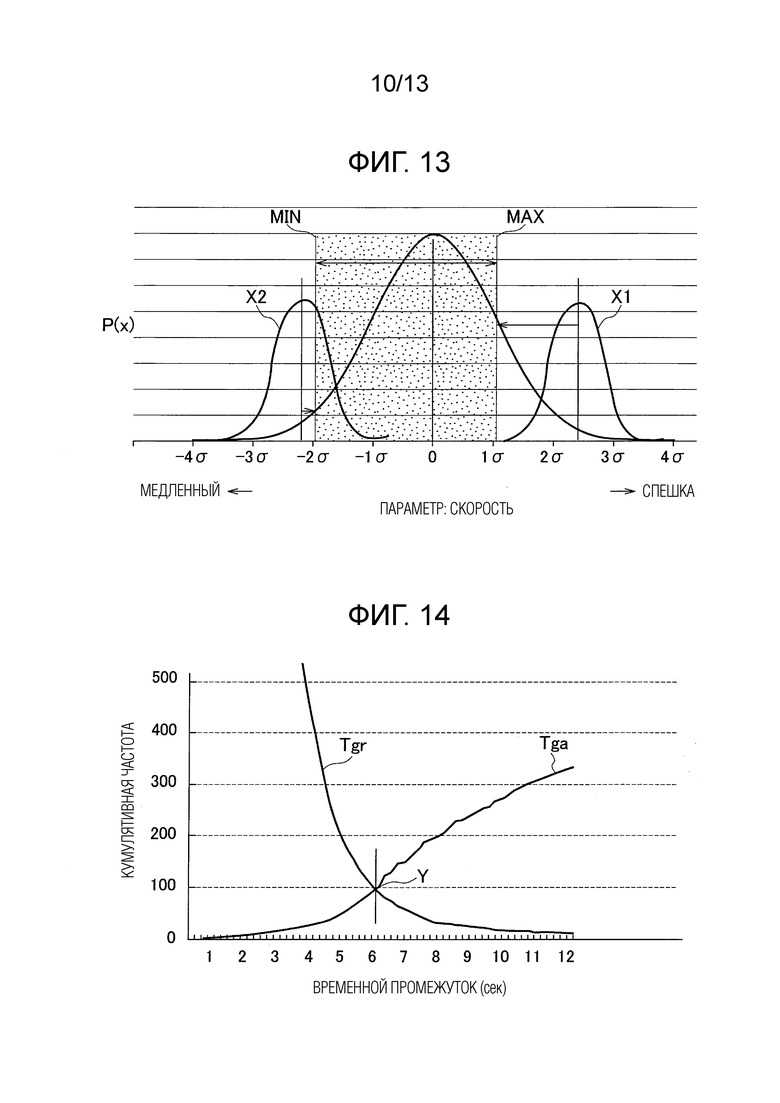
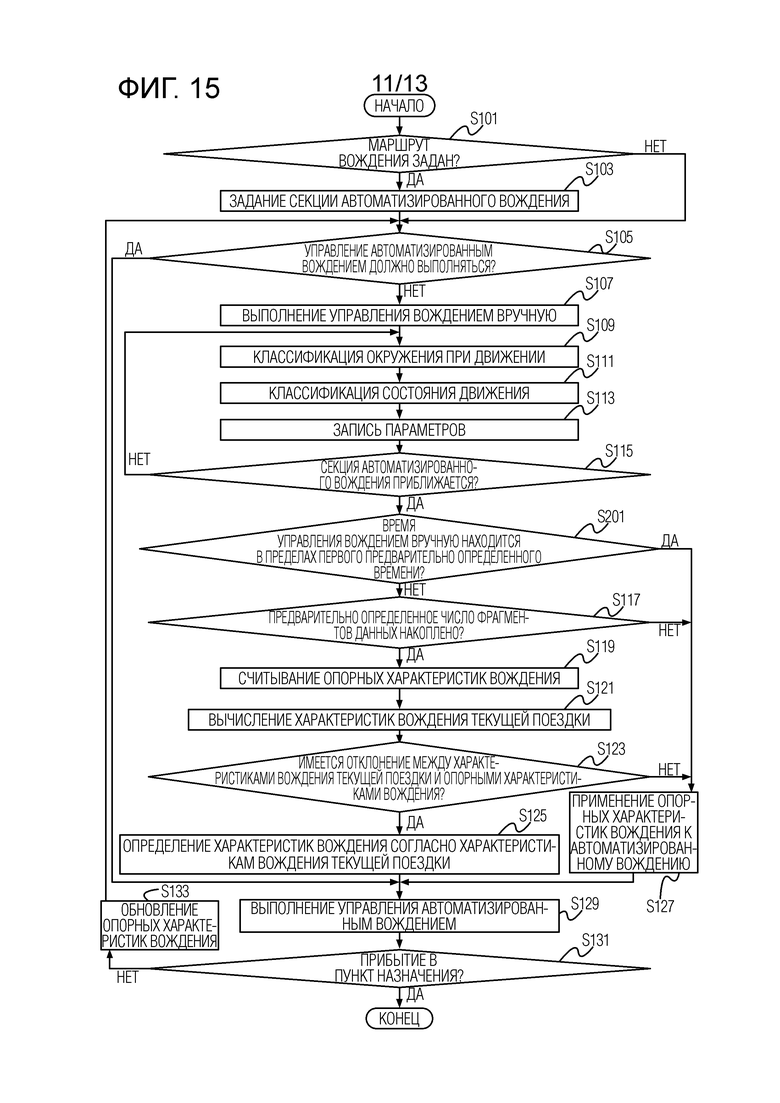
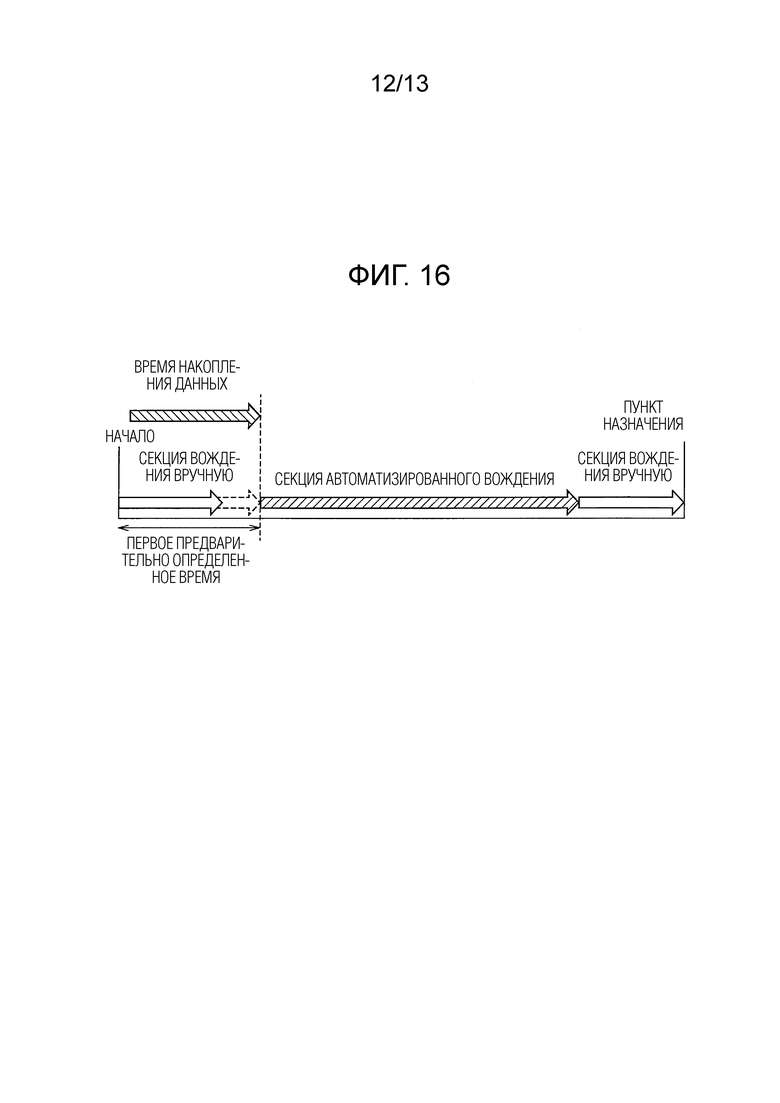
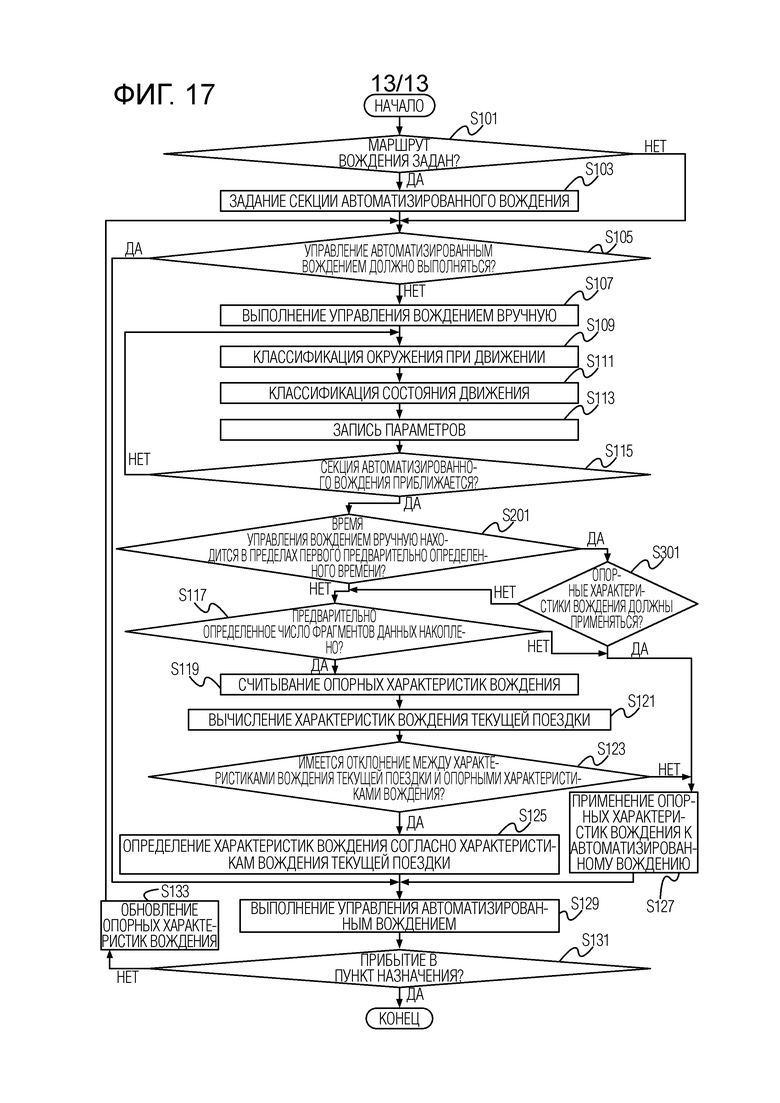
Транспортное средство может переключаться между режимами ручного и автоматизированного вождения. Способ управления вождением сравнивает между собой характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения, и если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, задает характеристики вождения, применяемые к автоматизированному вождению, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке. Автоматизированное вождение в текущей поездке может выполняться согласно характеристикам вождения, требуемым человеком, занимающим место в транспортном средстве, транспортного средства. 4 н. и 12 з.п. ф-лы, 17 ил.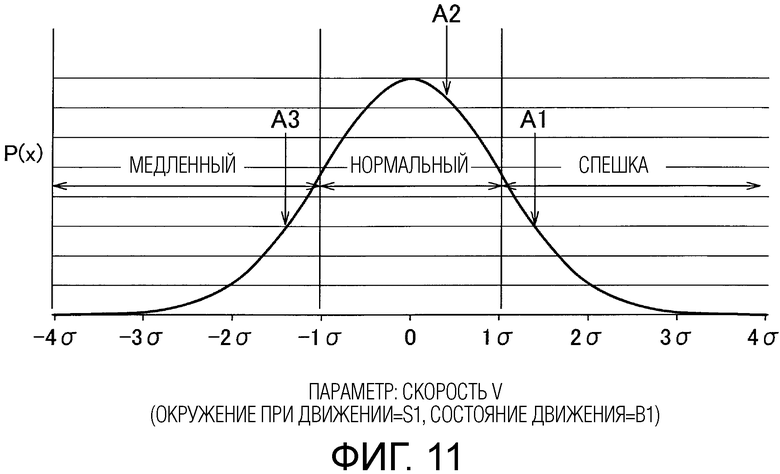
1. Способ управления вождением для устройства управления вождением, чтобы задавать характеристики вождения, применяемые к автоматизированному вождению в транспортном средстве, которое выполнено с возможностью переключения вождения вручную для того, чтобы вести транспортное средство согласно операциям вождения человека, занимающего место в транспортном средстве, и автоматизированного вождения для того, чтобы автоматически вести транспортное средство, между собой, содержащий этап, на котором:
- сравнивают характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения, и в случае, если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, задают характеристики вождения, применяемые к автоматизированному вождению, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке; и
если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, опорные характеристики вождения применяются, чтобы выполнять автоматизированное вождение.
2. Способ управления вождением для устройства управления вождением, чтобы задавать характеристики вождения, применяемые к автоматизированному вождению в транспортном средстве, которое выполнено с возможностью переключения вождения вручную для того, чтобы вести транспортное средство согласно операциям вождения человека, занимающего место в транспортном средстве, и автоматизированного вождения для того, чтобы автоматически вести транспортное средство, между собой, содержащий этап, на котором:
- сравнивают характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения, и если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, задают, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке, характеристики вождения, применяемые к автоматизированному вождению, при этом:
- характеристики вождения, применяемые к автоматизированному вождению, задаются в пределах предварительно определенного диапазона опорных характеристик вождения.
3. Способ управления вождением по п. 1 или 2, отличающийся тем, что характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в предыдущей поездке транспортного средства задаются в качестве опорных характеристик вождения.
4. Способ управления вождением по п. 2, отличающийся тем, что если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, человеку, занимающему место в транспортном средстве, транспортного средства рекомендуется выбирать характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке или опорные характеристики вождения, и выбранные характеристики вождения применяются, чтобы выполнять автоматизированное вождение.
5. Способ управления вождением по п. 4, отличающийся тем, что когда вождение вручную переключается на автоматизированное вождение, характеристики вождения, выбранные человеком, занимающим место в транспортном средстве, транспортного средства, отображаются на дисплее транспортного средства.
6. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что если время, в течение которого вождение вручную выполняется в текущей поездке, превышает второе предварительно определенное время, данные, накопленные в пределах третьего предварительно определенного времени, которое меньше второго предварительно определенного времени и находится перед моментом времени, в который вождение вручную переключается на автоматизированное вождение, используются для того, чтобы задавать характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке.
7. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке не используют данные, накопленные в пределах четвертого предварительно определенного времени после начала движения транспортного средства.
8. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что характеристики вождения, применяемые к автоматизированному вождению, регулируются согласно по меньшей мере тому, имеется или нет пассажир в транспортном средстве, или атрибутам пассажира.
9. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что характеристики вождения, применяемые к автоматизированному вождению, регулируются согласно требуемому времени прибытия в пункт назначения, требуемый человеком, занимающим место в транспортном средстве, транспортного средства.
10. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что характеристики вождения, применяемые к автоматизированному вождению, регулируются согласно физическому состоянию водителя транспортного средства.
11. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что данные относительно характеристик вождения человека, занимающего место в транспортном средстве, для вождения вручную накапливаются на сервере за пределами транспортного средства.
12. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что данные относительно характеристик вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке представляют собой по меньшей мере одно из скорости транспортного средства, расстояния между транспортными средствами между транспортным средством и едущим впереди транспортным средством, времени проезда расстояния между движущимися в потоке транспортными средствами или относительной скорости, времени торможения транспортного средства, ускорения транспортного средства, временного промежутка между транспортным средством и встречным транспортным средством или пересекающимся транспортным средством, расстояния или времени между транспортными средствами между транспортным средством и едущим сзади сбоку транспортным средством и расстояния сбоку между транспортным средством и припаркованным или остановленным транспортным средством.
13. Способ управления вождением по любому из пп. 1, 2, 4, 5, отличающийся тем, что характеристики вождения, применяемые к автоматизированному вождению, регулируются согласно запросу от человека, занимающего место в транспортном средстве, транспортного средства.
14. Способ управления вождением по п. 13, отличающийся тем, что предыстория запроса от человека, занимающего место в транспортном средстве, транспортного средства накапливается в качестве данных относительно характеристик вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке.
15. Устройство управления вождением, чтобы задавать характеристики вождения, применяемые к автоматизированному вождению в транспортном средстве, которое выполнено с возможностью переключения вождения вручную для того, чтобы вести транспортное средство согласно операциям вождения человека, занимающего место в транспортном средстве, и автоматизированного вождения между собой, содержащее:
- контроллер, сравнивающий характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения, и в случае, если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, задающий характеристики вождения, применяемые к автоматизированному вождению, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке, при этом:
- если время, в течение которого вождение вручную выполняется в текущей поездке, находится в пределах первого предварительно определенного времени, опорные характеристики вождения применяются, чтобы выполнять автоматизированное вождение.
16. Устройство управления вождением, чтобы задавать характеристики вождения, применяемые к автоматизированному вождению в транспортном средстве, которое выполнено с возможностью переключения вождения вручную для того, чтобы вести транспортное средство согласно операциям вождения человека, занимающего место в транспортном средстве, и автоматизированного вождения между собой, содержащее:
- контроллер, сравнивающий характеристики вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке транспортного средства с заранее сохраненными опорными характеристиками вождения, и в случае, если предварительно определенное отклонение возникает между характеристиками вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке и опорными характеристиками вождения, задающий характеристики вождения, применяемые к автоматизированному вождению, согласно характеристикам вождения человека, занимающего место в транспортном средстве, для вождения вручную в текущей поездке, при этом:
- характеристики вождения, применяемые к автоматизированному вождению, задаются в пределах предварительно определенного диапазона опорных характеристик вождения.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6449572 B1, 10.09.2002 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2012 |
|
RU2549578C1 |

