Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления движением транспортного средства, к способу для получения информации позиции транспортного средства, к машиночитаемому носителю записи и к программе для получения информации позиции транспортного средства.
Уровень техники
[0002] В последние годы, с точки зрения уменьшения энергопотребления и мер против нехватки водителей, когда множество транспортных средств движутся по шоссе и т.п., движение в колонне, при котором транспортные средства движутся при формировании колонны, выполняется. Патентный документ 1 раскрывает систему управления движением в колонне, в которой множество транспортных средств, имеющих функцию автоматизированного вождения, размещаются в направлении движения для того, чтобы выполнять движение в колонне. В системе управления движением в колонне, порядок и т.п. транспортных средств при движении в колонне определяется на основе информации характеристик, указывающей характеристики транспортных средств, так что расход топлива минимизируется.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. JP2017-215681A
Сущность изобретения
Техническая задача
[0004] Устройство управления, выполненное с возможностью администрировать транспортные средства в системе для администрирования колонны, как раскрыто в патентном документе 1, выдает инструкции относительно порядка транспортных средств, формирующих колонну, но патентный документ 1 не раскрывает соединение множества колонн. В случае, когда другая колонна движется около колонны, пункты назначения или скорости движения которых находятся близко друг к другу, если колонны принудительно движутся при соединении между собой, то экономия трудовых ресурсов и улучшение расхода топлива могут ожидаться.
Тем не менее, в механизме автоматизированного вождения и вождения в режиме "ехать за" в предшествующем уровне техники, отдельные транспортные средства находят транспортные средства, за которыми следует ехать, и формируют колонну. По этой причине, для того, чтобы соединять колонны между собой, транспортные средства отделяются по одному от колонны, которой принадлежат транспортные средства, и затем отдельно вливаются в другую колонну. В способе, в котором транспортные средства отдельно вливаются, имеется проблема в том, что формирование новой колонны заключает в себе опасность для дорожного движения, и эффективность является низкой, поскольку транспортные средства взаимно управляются по одному.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления движением транспортного средства, способ для получения информации позиции транспортного средства, машиночитаемый носитель записи и программу для получения информации позиции транспортного средства, которые допускают более точное измерение текущей позиции движущегося транспортного средства для того, чтобы выполнять, например, соединение между колоннами.
Другая цель настоящего изобретения заключается в том, чтобы предоставлять устройство администрирования колонн транспортных средств, способ администрирования колонн транспортных средств, систему администрирования колонн транспортных средств и программу для администрирования колонн транспортных средств, которые допускают плавное соединение колонн и уменьшение опасности при соединении.
Решение задачи
[0006] Согласно настоящему изобретению, вышеописанная проблема разрешается посредством устройства управления движением транспортного средства, выполненного с возможностью управлять движением транспортного средства на основе информации текущей позиции транспортного средства, причем устройство управления движением транспортного средства соединяется с устройством удаленного управления, выполненным с возможностью управлять движением транспортного средства через связь через сеть, при этом устройство управления движением транспортного средства включает в себя: модуль вычисления абсолютной позиции, выполненный с возможностью получать GNSS-информацию, требуемую для автономного позиционирования, через приемное GNSS-устройство, смонтированное на транспортном средстве, и вычислять абсолютную позицию транспортного средства посредством автономного позиционирования; модуль определения приема, выполненный с возможностью определять, может или нет информация GNSS-коррекции, требуемая для относительного позиционирования, приниматься от внешней опорной станции; модуль вычисления относительной позиции, выполненный с возможностью вычислять относительную позицию транспортного средства посредством относительного позиционирования; и модуль связи, выполненный с возможностью передавать информацию текущей позиции транспортного средства в устройство удаленного управления, при этом модуль связи выполнен с возможностью: передавать информацию позиции на основе относительной позиции, когда информация GNSS-коррекции может приниматься; и передавать информацию позиции на основе абсолютной позиции, когда информация GNSS-коррекции не может приниматься.
[0007] Согласно настоящему изобретению, вышеописанная проблема разрешается посредством устройства администрирования колонн транспортных средств, выполненного с возможностью администрировать транспортное средство, причем устройство администрирования колонн транспортных средств включает в себя: второй модуль связи, выполненный с возможностью выполнять связь с первым модулем связи в транспортном средстве, причем транспортное средство включает в себя модуль вычисления абсолютной позиции, выполненный с возможностью получать GNSS-информацию, требуемую для автономного позиционирования, через приемное GNSS-устройство, смонтированное на рассматриваемом транспортном средстве, и вычислять абсолютную позицию транспортного средства с использованием GNSS-информации, модуль вычисления относительной позиции, выполненный с возможностью, в ответ на прием информации GNSS-коррекции, требуемой для относительного позиционирования, из внешней опорной станции, корректировать абсолютную позицию посредством относительного позиционирования с использованием информации GNSS-коррекции и вычислять относительную позицию транспортного средства в опорной станции, модуль указания позиции, выполненный с возможностью указывать текущую позицию транспортного средства с использованием относительной позиции, модуль управления движением, выполненный с возможностью управлять движением транспортного средства на основе информации текущей позиции, указываемой посредством модуля указания позиции, и первый модуль связи, выполненный с возможностью передавать и принимать информацию текущей позиции транспортного средства; модуль администрирования, выполненный с возможностью администрировать состояние движения каждого транспортного средства, подвергнутого управлению движением посредством модуля управления движением на основе информации позиции транспортного средства, полученной посредством второго модуля связи через связь с каждым транспортным средством; и модуль управления состояниями, выполненный с возможностью управлять состоянием движения транспортного средства, администрируемого посредством модуля администрирования, при этом: модуль администрирования администрирует каждое транспортное средство таким образом, что оно находится в состоянии движения, в котором множество транспортных средств формируют группу колонн при движении на основе информации позиции, принимаемой из другого транспортного средства, отличающегося от транспортного средства; и модуль управления состояниями включает в себя: модуль определения, выполненный с возможностью определять, когда модуль администрирования администрирует состояние движения, в котором транспортные средства движутся при формировании группы колонн, то, разрешается или нет соединение между колоннами, на основе состояния движения транспортного средства; модуль принятия решений, выполненный с возможностью принимать решение в отношении режима соединения между колоннами на основе результата определения, полученного посредством модуля определения; модуль обработки инструкций, выполненный с возможностью инструктировать соединение между колоннами посредством передачи информации относительно режима соединения, решенного посредством модуля принятия решений, во впереди идущее транспортное средство каждой колонны; и модуль управления соединениями, выполненный с возможностью управлять соединением между колоннами через связь с впереди идущим транспортным средством, инструктированным посредством модуля обработки инструкций.
[0008] Как описано выше, устройство администрирования колонн транспортных средств может плавно выполнять соединение между колоннами посредством определения, посредством модуля определения, того, разрешается или нет соединение между колоннами, на основе состояния движения транспортных средств, формирующих группу колонн, и инструктирования соединения между колоннами посредством передачи режима соединения между колоннами, решенного посредством модуля принятия решений, в каждое впереди идущее транспортное средство колонн.
[0009] Поскольку движение при соединении выполняется в качестве группы транспортных средств посредством впереди идущего транспортного средства колонны, по сравнению со случаем, в котором транспортные средства отдельно вливаются, опасность при соединении уменьшается. Следовательно, можно достигать устройства администрирования колонн транспортных средств, допускающего плавное соединение колонн и уменьшение опасности при соединении.
Преимущества изобретения
[0010] Согласно настоящему изобретению, можно достигать устройства управления движением транспортного средства, способа для получения информации позиции транспортного средства, машиночитаемого носителя записи и программы для получения информации позиции транспортного средства, которые допускают более точное измерение текущей позиции движущегося транспортного средства.
[0011] Дополнительно, согласно настоящему изобретению, поскольку инструкция предоставляется для впереди идущего транспортного средства колонны, чтобы формировать группу транспортных средств, и колонны соединяются между собой, опасность при соединении уменьшается по сравнению со случаем, в котором транспортные средства отдельно вливаются. Следовательно, можно достигать устройства администрирования колонн транспортных средств, системы администрирования колонн транспортных средств и программы для администрирования колонн транспортных средств, которые допускают плавное соединение колонн и уменьшение опасности при соединении.
Краткое описание чертежей
[0012] Фиг. 1 является схемой конфигурации всей системы администрирования колонн транспортных средств согласно варианту осуществления.
Фиг. 2 является схемой, иллюстрирующей аппаратную конфигурацию устройства управления движением транспортного средства.
Фиг. 3А является схемой, иллюстрирующей аппаратную конфигурацию устройства обработки информации касательно транспортного средства.
Фиг. 3В является схемой, иллюстрирующей позицию идентификационной метки, присоединяемой к целевому транспортному средству.
Фиг. 3С является схемой, иллюстрирующей позицию идентификационной метки, присоединяемой к целевому транспортному средству.
Фиг. 4 является схемой, иллюстрирующей аппаратную конфигурацию устройства удаленного управления.
Фиг. 5 является схемой, иллюстрирующей функции устройства управления движением транспортного средства, устройства обработки информации касательно транспортного средства и устройства удаленного управления.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс получения информации позиции транспортного средства.
Фиг. 7А является схемой, иллюстрирующей состояние, в котором управление автономным вождением выполняется.
Фиг. 7В является схемой, иллюстрирующей состояние, в котором управление автономным вождением изменяется на управление относительным вождением.
Фиг. 1С является схемой, иллюстрирующей состояние, в котором управление автономным вождением изменяется из управления относительным вождением, и рассматриваемое транспортное средство обгоняет целевое транспортное средство.
Фиг. 8 является схемой, иллюстрирующей данные расстояния между транспортными средствами.
Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей способ управления движением транспортного средства.
Фиг. 10 является схемой, иллюстрирующей аппаратную конфигурацию устройства администрирования колонн транспортных средств.
Фиг. 11 является схемой, иллюстрирующей функции устройства администрирования колонн транспортных средств.
Фиг. 12 является схемой, иллюстрирующей переднюю колонну и заднюю колонну перед соединением и новую колонну после соединения.
Фиг. 13 является схемой, иллюстрирующей пример синтезированного изображения, сформированного из изображений, полученных из впереди идущего транспортного средства и едущего самым последним транспортного средства колонны.
Фиг. 14 является схемой последовательности операций, иллюстрирующей процесс определения соединения.
Фиг. 15 является схемой последовательности операций, иллюстрирующей процесс управления соединениями между колоннами.
Фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей пример процесса определения, разрешается или нет соединение между колоннами.
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей пример процесса в случае, если соединение между колоннами отменяется.
Подробное описание вариантов осуществления
[0013] Общее представление системы администрирования колонн транспортных средств
В дальнейшем в этом документе описывается вариант осуществления настоящего изобретения со ссылкой на фиг. 1-17.
Как проиллюстрировано на фиг. 1, система S администрирования колонн транспортных средств согласно настоящему варианту осуществления включает в себя транспортное средство С, которое допускает выполнение автоматизированного вождения или удаленного вождения посредством получения информации позиции, такой как GNSS-информация, и указания информации позиции (также называемой "позицией транспортного средства" или "информацией позиции транспортного средства") рассматриваемого транспортного средства, и устройство 80 администрирования колонн транспортных средств, которое принимает информацию позиции и т.п. из транспортного средства С и администрирует движение множества колонн F, сформированных посредством множества транспортных средств С.
[0014] Каждое из транспортных средств С, формирующих колонну F, управляется посредством системы S1 управления движением транспортного средства. Система S1 управления движением транспортного средства представляет собой систему, которая реализует "автоматизированное вождение", при котором транспортное средство С принудительно движется посредством выяснения внешнего окружения транспортного средства С (рассматриваемого транспортного средства V), планирования диспетчеризованного намеченного пути движения транспортного средства С вместо водителя и управления транспортным средством С вдоль диспетчеризованного намеченного пути движения, и "вождение в режиме "ехать за"", при котором транспортное средство С принудительно движется посредством следования за предварительно определенным целевым транспортным средством FV, которое представляет собой следующий пункт назначения.
[0015] Множество транспортных средств С, управляемых посредством системы S1 управления движением транспортного средства, повторяют переключение между "автоматизированным вождением" и "вождением в режиме "ехать за"" для того, чтобы формировать колонны F, включающие в себя множество транспортных средств. Колонны F указывают группы, включающие в себя множество транспортных средств, и также называются "группой колонн".
Поскольку впереди идущее транспортное средство Ct колонн F управляется в режиме удаленного вождения на основе операции из устройства 80 администрирования колонн транспортных средств или устройства 70 удаленного управления, колонны F управляются в режиме удаленного вождения в качестве всей группы транспортных средств.
В частности, поскольку устройство 80 администрирования колонн транспортных средств осуществляет удаленное вождение только впереди идущего транспортного средства Ct и задает транспортное средство С, движущееся позади, в вождение в режиме "ехать за", устройство 80 администрирования колонн транспортных средств может задаваться в состояние удаленного вождения в качестве группы транспортных средств (колонны).
[0016] Когда множество транспортных средств С движутся посредством системы S1 управления движением транспортного средства, группа колонн F может формироваться на идентичной дороге. Когда множество таких групп колонн F движутся, если расстояния между колоннами F уменьшаются, и их пункт назначения и скорость движения также находятся близко друг к другу, можно сокращать число впереди идущих транспортных средств Ct, которые должны чтобы управляться в режиме удаленного вождения, или снижать тариф на услуги связи, требуемый для удаленного или автоматизированного вождения впереди идущего транспортного средства Ct, посредством слияния колонн.
В системе S администрирования колонн транспортных средств согласно настоящему варианту осуществления, устройство 80 администрирования колонн транспортных средств администрирует состояние движения, включающее в себя информацию позиции транспортных средств С, формирующих колонны F, в качестве информации состояния движения, и управляет впереди идущим транспортным средством Ct каждой колонны F таким образом, что соединение между колоннами F выполняется, когда предварительно определенное условие удовлетворяется.
Иными словами, в настоящем изобретении, очевидно, что каждое транспортное средство выполняет управление вождением, такое как автоматизированное вождение или вождение в режиме "ехать за", таким образом, что множество транспортных средств движутся при формировании группы колонн, и таким образом, что колонны не формируются посредством управления колоннами. В дальнейшем в этом документе, сначала описывается система S1 управления движением транспортного средства, которая реализует "автоматизированное вождение" и "вождение в режиме "режиме "ехать за" транспортного средства С, а после этого описывается система S администрирования колонн транспортных средств, которая выполняет процесс соединения колонн посредством устройства 80 администрирования колонн транспортных средств.
[0017] Система управления движением транспортного средства
Как описано выше, система S1 управления движением транспортного средства представляет собой систему, которая реализует "автоматизированное вождение", при котором транспортное средство С принудительно движется посредством выяснения внешнего окружения транспортного средства С, планирования диспетчеризованного намеченного пути движения транспортного средства С вместо водителя и управления транспортным средством С вдоль диспетчеризованного намеченного пути движения, и "вождение в режиме "ехать за"", при котором транспортное средство С принудительно движется посредством следования за предварительно определенным целевым транспортным средством FV. В системе S1 управления движением транспортного средства, можно выполнять "процесс переключения режимов" для переключения между режимом управления автоматизированным вождением и режимом управления вождением в режиме "ехать за".
[0018] "Вождение в режиме "ехать за" (управление вождением в режиме "ехать за")" может называться "относительным вождением (управлением относительным вождением)". В нижеприведенном описании, "вождение в режиме "ехать за" (управление вождением в режиме "ехать за")" называется "относительным вождением".
В настоящем варианте осуществления, режим управления автоматизированным вождением (первый режим управления вождением)" называется просто "режимом автоматизированного вождения", и "режим управления вождением в режиме "ехать за" (второй режим управления вождением)" называется просто "режимом относительного вождения".
Транспортное средство С, которое управляется в режиме относительного вождения, называется "рассматриваемым транспортным средством V", и транспортное средство С, за которым должно следовать рассматриваемое транспортное средство V, называется "целевым транспортным средством FV".
[0019] "Автоматизированное вождение (режим
автоматизированного вождения)" включает в себя "автономное вождение (режим автономного вождения)", при котором рассматриваемое транспортное средство V автономно движется посредством управления рассматриваемым транспортным средством V, и "удаленное вождение (режим удаленного вождения)", при котором оператор за пределами рассматриваемого транспортного средства V выполняет удаленную операцию (внешнюю операцию), чтобы заставлять рассматриваемое транспортное средство V двигаться. Иными словами, в настоящем варианте осуществления, "автономное вождение" и "удаленное вождение" совместно называются "автоматизированным вождением". По существу, выражение "автоматизированное вождение" означает автономное вождение.
При удаленном вождении, оператор может не быть человеком и, например, может представлять собой искусственный интеллект (AI).
[0020] В дополнение к "автоматизированному вождению" и "относительному вождению", предусмотрено "вождение вручную (режим вождения вручную)", при котором водитель едет на рассматриваемом транспортном средстве V и фактически выполняет операцию вождения. В процессе переключения режимов, в дополнение к переключению между режимом вождения вручную и режимом автоматизированного вождения, режим вождения вручную и режим относительного вождения могут переключаться.
[0021] "Рассматриваемое транспортное средство V" представляет собой транспортное средство, на котором монтируется устройство 1 управления движением транспортного средства, которое описывается ниже, и которое имеет функцию выполнения автоматизированного вождения и функцию выполнения относительного вождения.
"Целевое транспортное средство FV" представляет собой транспортное средство, на котором монтируется, по меньшей мере, устройство 50 передачи информации касательно транспортного средства, которое описывается ниже, и которое движется в состоянии, в котором информация касательно транспортного средства (в частности, идентификационная информация транспортного средства, информация текущей позиции и информация диспетчеризованного намеченного пути движения) может передаваться через связь через сеть. "Целевое транспортное средство FV" может включать в себя устройство 1 управления движением транспортного средства, которое описывается ниже, смонтированное на нем, и может иметь функцию выполнения автоматизированного вождения и функцию выполнения относительного вождения, аналогично рассматриваемому транспортному средству V.
Целевое транспортное средство FV не ограничено едущим впереди транспортным средством, которое движется впереди рассматриваемого транспортного средства V, и может представлять собой параллельно движущееся транспортное средство, которое движется параллельно рассматриваемому транспортному средству V. Альтернативно, целевое транспортное средство FV может представлять собой едущее сзади транспортное средство, которое движется позади рассматриваемого транспортного средства V.
Целевое транспортное средство FV, например, может представлять собой автобус, такси, грузовик и т.п., который движется по предварительной установленному диспетчеризованному намеченному пути движения, либо автобус с круговым движением и т.п., который движется по предварительно определенному намеченному пути кругового движения. Конечно, могут использоваться другие общие транспортные средства.
[0022] Аппаратная конфигурация системы управления движением транспортного средства
Как проиллюстрировано на фиг. 1 и 2, система S1 управления движением транспортного средства включает в себя устройство 1 управления движением транспортного средства, которое монтируется на каждом из рассматриваемых транспортных средств V и всесторонне управляет движением рассматриваемых транспортных средств, бортовой датчик 10, который обнаруживает внешнее окружение около рассматриваемого транспортного средства V, бортовой локатор 20, который принимает GNSS-сигнал из искусственных спутников SA и опорных станций ST и измеряет текущую позицию рассматриваемого транспортного средства V, бортовой ECU 30, который осуществляет рулевое управление, управление ускорением и замедлением и т.п. рассматриваемого транспортного средства V и устройство 40 бортовой связи, которое обменивается данными с внешним устройством.
[0023] Система S1 управления движением транспортного средства включает в себя: устройство 50 передачи информации касательно транспортного средства, которое монтируется на целевом транспортном средстве FV, соединяется с устройством 1 управления движением транспортного средства через сеть и передает информацию целевого транспортного средства, включающую в себя информацию позиции целевого транспортного средства FV, через связь через сеть; и идентификационные метки 60, которые присоединяются к целевому транспортному средству FV и в которые встраивается идентификационная информация транспортного средства для целевого транспортного средства FV.
Рассматриваемое транспортное средство V дополнительно может включать в себя устройство 50 передачи информации касательно транспортного средства, включенное в целевое транспортное средство FV, и идентификационные метки 60, и целевое транспортное средство FV дополнительно может включать в себя бортовой датчик 10, бортовой локатор 20, бортовой ECU 30 и устройство 40 бортовой связи, включенные в рассматриваемое транспортное средство V. Иными словами, рассматриваемое транспортное средство V и целевое транспортное средство FV могут иметь идентичную конфигурацию, и в силу этого рассматриваемое транспортное средство V и целевое транспортное средство FV могут меняться местами друг с другом, чтобы конфигурировать систему S1 управления движением транспортного средства.
Дополнительно, система S1 управления движением транспортного средства включает в себя устройство 70 удаленного управления, которое устанавливается за пределами рассматриваемого транспортного средства V и управляет (удаленно управляет) движением рассматриваемого транспортного средства V через связь с устройством 1 управления движением транспортного средства через сеть.
Устройство 1 управления движением транспортного средства, устройство 50 передачи информации касательно транспортного средства и устройство 70 удаленного управления могут непосредственно обмениваться данными между собой.
[0024] Аппаратная конфигурация устройства управления движением транспортного средства
Как проиллюстрировано на фиг. 2, устройство 1 управления движением транспортного средства представляет собой компьютер, который соединяется с бортовым датчиком 10, бортовым локатором 20, бортовым ECU 30 и устройством 40 бортовой связи через бортовую сеть (CAN).
В частности, устройство 1 управления движением транспортного средства представляет собой компьютер, который включает в себя CPU, служащий в качестве устройства для обработки вычисления и управления данными, ROM, RAM и HDD (SSD), служащие в качестве устройств хранения данных, и интерфейс связи, который передает и принимает информационные данные через бортовую сеть.
Устройство хранения данных устройства 1 управления движением транспортного средства сохраняет программу для управления движением транспортного средства и программу для администрирования колонн транспортных средств в дополнение к основной программе, которая реализует необходимые функции в качестве компьютера. Посредством выполнения этих программ посредством CPU, демонстрируются функции устройства 1 управления движением транспортного средства.
Бортовой ECU 30 (интегрированный ECU 31), устройство 50 передачи информации касательно транспортного средства и устройство 70 удаленного управления представляют собой компьютеры, имеющие идентичную аппаратную конфигурацию.
[0025] Чтобы выполнять "автономное вождение", устройство 1 управления движением транспортного средства управляет "автономным движением" рассматриваемого транспортного средства V посредством управления бортовым ECU 30 (интегрированным ECU 31) на основе информации внешнего окружения, полученной из бортового датчика 10, информации позиции рассматриваемого транспортного средства V, полученной из бортового локатора 20, и информации рассматриваемого транспортного средства, полученной из бортового ECU 30.
Чтобы выполнять "относительную операцию (вождение в режиме "ехать за")", устройство 1 управления движением транспортного средства осуществляет беспроводную связь с устройством 50 передачи информации касательно транспортного средства через устройство 40 бортовой связи и принимает информацию целевого транспортного средства, включающую в себя информацию позиции предварительно определенного целевого транспортного средства FV. Бортовой ECU 30 (интегрированный ECU 31) управляется на основе информации внешнего окружения, информации позиции рассматриваемого транспортного средства V и информации целевого транспортного средства, включающей в себя информацию позиции целевого транспортного средства FV, за счет этого управляя "относительным движением (движением в режиме "ехать за")" рассматриваемого транспортного средства V относительно целевого транспортного средства FV.
[0026] Помимо этого, для того, чтобы выполнять "удаленное вождение", устройство 1 управления движением транспортного средства осуществляет беспроводную связь с устройством 70 удаленного управления через устройство 40 бортовой связи и передает информацию внешнего окружения, информацию позиции рассматриваемого транспортного средства V и информацию рассматриваемого транспортного средства в устройство 70 удаленного управления. Устройство 70 удаленного управления может принимать эти фрагменты информации, отображать контент на основе информации внешнего окружения и информации позиции рассматриваемого транспортного средства V на мониторе 71 (навигационном мониторе 72) и уведомлять оператор в отношении контента пользователем.
[0027] Более конкретно, устройство 1 управления движением транспортного средства заново монтируется на рассматриваемом транспортном средстве V, на котором "функция автономного вождения (бортовой датчик 10, бортовой локатор 20 и бортовой ECU 30)" монтируется заранее, так что рабочие характеристики существующей "функции автономного вождения" улучшаются, и "функция относительного вождения" и "функция удаленного вождения" заново предоставляются.
[0028] Конфигурация бортового датчика
Бортовой датчик 10 обнаруживает движущийся объект (другое транспортное средство, пешеход и т.п.), различные конструкции, форму дороги и т.п. около рассматриваемого транспортного средства V в качестве внешнего окружения около рассматриваемого транспортного средства V. В частности, бортовой датчик 10 главным образом включает в себя множество устройств 11 захвата изображений, множество радаров 12 и множество лидаров 13.
Бортовой датчик 10 дополнительно может включать в себя датчик обнаружения, отличный от датчиков, описанных выше.
[0029] Каждое из устройств 11 захвата изображений представляет собой малогабаритную камеру для формирования изображений (широкоугольную камеру), которая получает внешнее видео около рассматриваемого транспортного средства V, формирует внешние видеоданные для того, чтобы реализовывать "функцию считывания" для управления движением рассматриваемого транспортного средства V и "функцию мониторинга" для водителя (оператора), и передает внешние видеоданные в устройство 1 управления движением транспортного средства.
[0030] Множество устройств 11 захвата изображений монтируются на рассматриваемом транспортном средстве V и включают в себя, в качестве основных камер, первое устройство 11а захвата изображений, второе устройство 11b захвата изображений и третье устройство 11с захвата изображений, которые присоединяются к ветровым стеклам рассматриваемого транспортного средства V и захватывают изображения передней стороны, правой стороны и левой стороны рассматриваемого транспортного средства V, четвертое устройство 11d захвата изображений, которое присоединяется к заднему бамперу рассматриваемого транспортного средства V и захватывает изображения задней стороны рассматриваемого транспортного средства V, и пятое устройство Не захвата изображений и шестое устройство 11f захвата изображений, которые присоединяются к левому и правому зеркалам рассматриваемого транспортного средства V и захватывают изображения расположенной под углом правой задней стороны и расположенной под углом левой задней стороны рассматриваемого транспортного средства V.
[0031] Помимо этого, устройства 11 захвата изображений включают в себя, в качестве субкамер, седьмое устройство 11g захвата изображений, которое присоединяется к переднему бамперу рассматриваемого транспортного средства V и захватывает изображения впереди рассматриваемого транспортного средства V, и восьмое устройство 11h захвата изображений и девятое устройство 11i захвата изображений, которые присоединяются к периферии правого и левого задних фонарей рассматриваемого транспортного средства V и захватывают изображения расположенной под углом правой задней стороны и расположенной под углом левой задней стороны рассматриваемого транспортного средства V.
В настоящем варианте осуществления, в сумме девять устройств 11 захвата изображений присоединяются к предварительно определенным позициям рассматриваемого транспортного средства V, но число и позиции присоединения устройств 11 захвата изображений могут изменяться согласно типу и форме рассматриваемого транспортного средства V. То же применимо к радарам 12 и лидарам 13.
В качестве другого примера субкамеры, седьмое устройство 11g захвата изображений может присоединяться к верхнему участку тыльного стекла (заднего стекла) рассматриваемого транспортного средства V и может захватывать изображение задней части рассматриваемого транспортного средства V из верхнего участка. В этом случае, восьмое устройство 11h захвата изображений может присоединяться к передней правой А-стойке рассматриваемого транспортного средства V, и девятое устройство 11i захвата изображений может присоединяться к передней левой А-стойке.
[0032] Каждый из радаров 12 представляет собой радар миллиметрового диапазона, который обнаруживает целевой объект (измеряет позицию и скорость целевого объекта) посредством испускания радиоволн при непрерывном изменении направления испускания и приема отраженных волн от целевого объекта и выполняет формирование трехмерных пространственных изображений. По сравнению с устройствами 11 захвата изображений и лидарами 13, можно точно обнаруживать окружающую ситуацию, такую как ночь или плохая погода с плохой видимостью.
Радары 12 получают данные результатов обнаружения (сигналы обнаружения) целевого объекта и передают данные результатов обнаружения в устройство 1 управления движением транспортного средства.
[0033] Множество радаров 12 монтируются на рассматриваемом транспортном средстве V и включают в себя первый радар 12а и второй радар 12b, которые присоединяются к периферии левой и правой передних фар рассматриваемого транспортного средства V, и третий радар 12с и четвертый радар 12d, которые присоединяются к периферии левой и правой задних фар рассматриваемого транспортного средства V.
Радары 12 конкретно не ограничены радаром миллиметрового диапазона и могут представлять собой такой радар, как лазерный радар или ультразвуковой датчик.
[0034] Каждый из лидаров 13 также называется "лидаром" и представляет собой удаленный датчик, который выполняет формирование трехмерных пространственных изображений посредством испускания лазерного света и приема отраженного света от целевого объекта, чтобы измерять расстояние до целевого объекта. По сравнению с устройствами 11 захвата изображений и радарами 12, расстояние до целевого объекта в окрестностях может измеряться в единицах нескольких сантиметров.
Лидары 13 получают данные измерения расстояния, полученные посредством измерения расстояния до целевого объекта, и передают данные измерения расстояния в устройство 1 управления движением транспортного средства.
Множество лидаров 13 монтируются на рассматриваемом транспортном средстве V и включают в себя первый лидар 13а и второй лидар 13b, которые присоединяются к периферии левой и правой передних фар рассматриваемого транспортного средства V, третий лидар 13 с, который присоединяется к задней панели рассматриваемого транспортного средства V, и четвертый лидар 13d и пятый лидар 13е, которые присоединяются к периферии левой и правой задних фар рассматриваемого транспортного средства V.
[0035] Конфигурация бортового локатора
Бортовой локатор 20 измеряет текущую позицию рассматриваемого транспортного средства V с использованием санитарной системы позиционирования с использованием искусственных спутников SA и опорных станций ST и измеряет ускорение и угловую скорость рассматриваемого транспортного средства V, с тем чтобы увеличивать точность измерений текущей позиции.
В частности, бортовой локатор 20 включает в себя приемное GNSS-устройство 21, которое принимает GNSS-радиоволны (GPS-радиоволны) из множества искусственных спутников SA, и модуль 22 инерциальных измерений, который измеряет ускорение и угловую скорость рассматриваемого транспортного средства V.
[0036] В частности, приемное GNSS-устройство 21 представляет собой приемное RTK-GNSS-устройство, которое принимает GNSS-радиоволны из множества (в частности, четырех) искусственных спутников SA и формирует "GNSS-информацию", требуемую для автономного позиционирования. Дополнительно, "информация GNSS-коррекции", требуемая для относительного позиционирования, принимается из внешних опорных станций ST. Приемное GNSS-устройство 21 представляет собой пример приемного устройства, которое принимает информацию, указывающую информацию позиции (позицию транспортного средства, информацию позиции транспортного средства), указывающую позицию транспортного средства, и может представлять собой приемное GPS-устройство, которое принимает GPS-радиоволны, приемное RNSS-устройство, которое принимает RNSS-радиоволны (радионавигационную
спутниковую систему), и т.п.
Опорная станция ST представляет собой стационарную опорную станцию, установленную в известной точке, принимает GNSS-радиоволны из множества искусственных спутников SA, формирует "информацию GNSS-коррекции" и передает информацию GNSS-коррекции в приемное GNSS-устройство 21.
"GNSS-информация" представляет собой информацию расстояния между множеством искусственных спутников SA и приемным GNSS-устройством 21.
"Информация GNSS-коррекции" представляет собой корректирующие данные для коррекции ошибки расстояния, вызываемой посредством задержки или сбоя при приеме информации из спутника, когда опорная станция ST, расположенная в известной точке, принимает GNSS-радиоволны, и опорная станция ST обменивается данными с приемным GNSS-устройством 21.
[0037] Модуль 22 инерциальных измерений также называется "IMU", включает в себя трехосный гиродатчик (измеритель угловой скорости) и трехосный датчик ускорения (акселерометр), измеряет трехмерную угловую скорость и ускорение рассматриваемого транспортного средства V и передает информацию ускорения и угловой скорости рассматриваемого транспортного средства V в устройство 1 управления движением транспортного средства.
Устройство 1 управления движением транспортного средства может измерять текущую позицию рассматриваемого транспортного средства V в меньшем диапазоне ошибок посредством комбинирования GNSS-информации (информации GNSS-коррекции), принимаемой от приемного GNSS-устройства 21, и информации угловой скорости и ускорения рассматриваемого транспортного средства V, принимаемой из модуля 22 инерциальных измерений, и определения позиции.
[0038] Конфигурация бортового ECU
Бортовой ECU 30, например, представляет собой ECU для ADAS, включает в себя интегрированный ECU 31 на верхнем уровне, который соединяется с устройством 1 управления движением транспортного средства и передает и принимает различные данные, ECU 32 рулевого колеса, ECU 33 акселератора и ECU 34 тормоза на нижнем уровне, которые соединяются с интегрированным ECU 31 на верхнем уровне и осуществляют рулевое управление, управление ускорением и замедлением и т.п. рассматриваемого транспортного средства V подразделенным способом и формируют иерархическую структуру.
ECU 32 рулевого колеса также называется "компьютером управления помощью при вождении", и ECU 33 акселератора и ECU 34 тормоза также называются "модулем управления мощностью".
Число и функции отдельных ECU, соединенных с интегрированным ECU 31, конкретно не ограничены тремя ECU 32-34, и другие ECU дополнительно могут предоставляться на идентичном уровне с этими ECU.
[0039] ECU 32 рулевого колеса управляет электроусилителем V1 рулевого колеса рассматриваемого транспортного средства V в ответ на инструкцию из интегрированного ECU 31 и главным образом управляет направлением движения рассматриваемого транспортного средства V.
Электроусилитель V1 рулевого колеса включает в себя механизм рулевого управления, который управляет передними колесами рассматриваемого транспортного средства V. Например, в режиме вождения вручную, передние колеса рассматриваемого транспортного средства V рулятся посредством операции руления рулевого колеса V1a водителем.
[0040] ECU 33 акселератора управляет электрическим дросселем V2 рассматриваемого транспортного средства V в ответ на инструкцию из интегрированного ECU 31 и главным образом управляет ускорением и замедлением рассматриваемого транспортного средства V.
Электрический дроссель V2 включает в себя приводной механизм, который выводит движущую силу для вращения ведущих колес рассматриваемого транспортного средства V. Например, в режиме вождения вручную, выходная мощность двигателя регулируется в соответствии с операцией нажатия педали акселератора для педали V2a акселератора водителем.
[0041] ECU 34 тормоза управляет электромагнитным тормозным устройством V3 рассматриваемого транспортного средства V в ответ на инструкцию из интегрированного ECU 31 и главным образом управляет замедлением и остановкой рассматриваемого транспортного средства V.
Электромагнитное тормозное устройство V3 включает в себя механизм, который присоединяется к каждому колесу рассматриваемого транспортного средства V и замедляет или останавливает рассматриваемое транспортное средство V за счет приложения сопротивления вращению колеса. Например, в режиме вождения вручную, операция электромагнитного тормозного устройства V3 регулируется в соответствии с операцией нажатия педали тормоза для педали V3a тормоза водителем.
[0042] Устройство бортовой связи
Устройство 40 бортовой связи представляет собой устройство, которое выполняет обмен информацией с устройством 50 передачи информации касательно транспортного средства, смонтированным на целевом транспортном средстве FV, с устройством 70 удаленного управления, установленным снаружи, с устройством 80 администрирования колонн транспортных средств и с внешним сервером (не проиллюстрирован) через сеть.
В частности, устройство 40 бортовой связи принимает, в качестве информации, требуемой для "относительного вождения", информацию целевого транспортного средства, включающую в себя информацию позиции целевого транспортного средства FV, полученную посредством устройства 50 передачи информации касательно транспортного средства, и передает информацию целевого транспортного средства в устройство 1 управления движением транспортного средства.
Помимо этого, устройство 40 бортовой связи передает внешнюю видеоинформацию, полученную посредством устройства 1 управления движением транспортного средства, и информацию текущей позиции в устройство 70 удаленного управления в качестве информации, требуемой для "удаленного вождения". Информация операций вождения рассматриваемого транспортного средства V принимается из устройства 70 удаленного управления, которое принимает пользовательский ввод оператора, и передается в устройство 1 управления движением транспортного средства.
Устройство 40 бортовой связи передает внешнюю видеоинформацию, полученную из устройства 1 управления движением транспортного средства, информацию текущей позиции, информацию касательно транспортного средства и т.п. в устройство 80 администрирования колонн транспортных средств в качестве информации, требуемой для "процесса определения соединений между колоннами", который описывается ниже. Дополнительно, информация операций вождения рассматриваемого транспортного средства V принимается из устройства 80 администрирования колонн транспортных средств и передается в устройство 1 управления движением транспортного средства.
Помимо этого, устройство 40 бортовой связи, например, может выполнять обмен информацией с внешним сервером (не проиллюстрирован) и принимать самую последнюю информацию дорожного движения, погодную информацию и т.п. из внешнего сервера.
[0043] Аппаратная конфигурация устройства передачи информации касателвно транспортного средства
Как проиллюстрировано на фиг. 1 и 3А, устройство 50 передачи информации касательно транспортного средства представляет собой компьютер, который монтируется на целевом транспортном средстве FV, получает информацию целевого транспортного средства, включающую в себя информацию текущей позиции целевого транспортного средства FV, и передает информацию целевого транспортного средства в рассматриваемое транспортное средство V. Устройство 50 передачи информации касательно транспортного средства включает в себя бортовой локатор 51 и устройство 52 бортовой связи в качестве специальной аппаратной конфигурации.
"Информация целевого транспортного средства" включает в себя информацию позиции (информацию позиции в реальном времени) целевого транспортного средства FV, информацию диспетчеризованного намеченного пути движения и идентификационную информацию транспортного средства и сохраняется в модуле 500 хранения устройства 50 передачи информации касательно транспортного средства.
"Идентификационная информация транспортного средства" представляет собой идентификатор транспортного средства для идентификации целевого транспортного средства FV, и такая информация, как название, модель и номер кузова типа транспортного средства, ассоциируется с каждым идентификатором транспортного средства и сохраняется в модуле 500 хранения. Идентификационная информация транспортного средства сохраняется в модуле 500 хранения и также встраивается в идентификационные метки 60, присоединяемые к целевому транспортному средству FV.
[0044] Конфигурация бортового локатора
Аналогично бортовому локатору 20, описанному выше, бортовой локатор 51 включает в себя приемное GNSS-устройство 51а, которое принимает GNSS-радиоволны (GPS-радиоволны) из множества искусственных спутников SA, и модуль 51b инерциальных измерений, который измеряет ускорение и угловую скорость целевого транспортного средства FV.
Устройство 52 бортовой связи представляет собой устройство, которое выполняет обмен информацией с устройством 1 управления движением транспортного средства, смонтированным на рассматриваемом транспортном средстве V, через сеть.
В частности, устройство 52 бортовой связи передает, в качестве информации, требуемой для "относительного вождения" рассматриваемого транспортного средства V, информацию целевого транспортного средства в устройство 1 управления движением транспортного средства (устройство 40 бортовой связи) в любой момент времени или при необходимости.
В частности, устройство 52 бортовой связи может передавать информацию позиции целевого транспортного средства FV в информации целевого транспортного средства в реальном времени.
Выражение "передача в реальном времени" включает в себя случай, в котором информация позиции передается одновременно с изменением информации позиции целевого транспортного средства FV, и случай, в котором информация позиции передается в состоянии, в котором возникает некоторое запаздывание во времени.
[0045] Идентификационная метка
Как проиллюстрировано на фиг. 3А-3С, идентификационная метка 60 представляет собой двухмерные штрих-коды, в которых встраивается (сохраняется) идентификационная информация транспортного средства для идентификации целевого транспортного средства FV, и множество идентификационных меток 60 присоединяются к внешней поверхности целевого транспортного средства FV. В каждой из идентификационных меток 60, информация, допускающая указание диспетчеризованного намеченного пути движения целевого транспортного средства FV, может встраиваться совместно.
Идентификационная метка 60 распознается посредством устройства 11 захвата изображений рассматриваемого транспортного средства V.
В частности, когда идентификационная метка 60 распознается в видео, захваченном посредством устройства 11 захвата изображений, устройство 11 захвата изображений получает, в качестве результатов распознавания, идентификационную информацию транспортного средства для целевого транспортного средства FV, встраиваемую в идентификационную метку 60, информацию, допускающую указание диспетчеризованного намеченного пути движения, и т.п. Устройство 1 управления движением транспортного средства может получать идентификационную информацию транспортного средства для целевого транспортного средства FV из устройства 11 захвата изображений через сетевую связь в предварительно определенном способе связи или через бортовую сеть (CAN).
В вышеприведенном варианте осуществления, идентификационная информация транспортного средства может получаться из устройства 50 передачи информации касательно транспортного средства и идентификационной метки 60.
[0046] Идентификационные метки 60 включают в себя первую идентификационную метку 60а, вторую идентификационную метку 60b и третью идентификационную метку 60с, которые присоединяются к центральному участку, левому боковому концевому участку и правому боковому концевому участку в направлении ширины транспортного средства на задней поверхности целевого транспортного средства FV, соответственно, и четвертую идентификационную метку 60d, пятую идентификационную метку 60е и шестую идентификационную метку 60f, которые присоединяются к центральному участку, левому боковому концевому участку и правому боковому концевому участку на передней поверхности целевого транспортного средства FV, соответственно.
Идентификационные метки 60 включают в себя седьмую идентификационную метку 60g, восьмую идентификационную метку 60h и девятую идентификационную метку 60i, которые присоединяются к центральному участку, переднему концевому участку и заднему концевому участку в направлении спереди назад транспортного средства на левой боковой поверхности целевого транспортного средства FV, соответственно, и десятую идентификационную метку 60j, одиннадцатую идентификационную метку 60k и двенадцатую идентификационную метку 601, которые присоединяются к центральному участку, переднему концевому участку и заднему концевому участку на правой боковой поверхности целевого транспортного средства FV, соответственно.
[0047] Первая идентификационная метка 60а, четвертая идентификационная метка 60d, седьмая идентификационная метка 60g и десятая идентификационная метка 60j, которые располагаются в центральных участках задней поверхности, передней поверхности и обеих боковых поверхностей целевого транспортного средства FV, соответственно, формируются немного большими других идентификационных меток. Следовательно, когда рассматриваемое транспортное средство V движется около целевого транспортного средства FV, устройство 11 захвата изображений может легко распознавать идентификационную метку 60. Другими словами, устройство 1 управления движением транспортного средства может легко обнаруживать присутствие целевого транспортного средства FV.
[0048] В каждой из идентификационных меток 60а-601, идентификационная информация транспортного средства для целевого транспортного средства FV встраивается, и информация позиций меток, указывающая позицию (позицию кузова транспортного средства), в которой каждая идентификационная метка 60 присоединяется к целевому транспортному средству FV, встраивается.
Следовательно, когда любая из идентификационных меток 60 из числа идентификационных меток 60а-601 распознается посредством устройства 11 захвата изображений рассматриваемого транспортного средства V, устройство 1 управления движением транспортного средства может получать идентификационную информацию транспортного средства для целевого транспортного средства FV и обнаруживать целевое транспортное средство FV.
Помимо этого, например, посредством распознавания идентификационной метки 60а и идентификационной метки 60 с из числа идентификационных меток 60а-601 либо посредством распознавания только идентификационной метки 60с, устройство 1 управления движением транспортного средства может обнаруживать то, что рассматриваемое транспортное средство V находится в позиции сзади относительно целевого транспортного средства FV и дополнительно в позиции справа относительно целевого транспортного средства FV, на основе информации позиций меток.
В частности, устройство 1 управления движением транспортного средства может точно выяснять позицию (относительную позицию) целевого транспортного средства FV относительно рассматриваемого транспортного средства V на основе информации окружения около рассматриваемого транспортного средства V, информации позиции рассматриваемого транспортного средства V, информации позиции целевого транспортного средства FV и информации позиций меток, полученной из идентификационной метки 60.
Идентификационная метка 60 может помечаться чернилами, которые являются невидимыми и называются "прозрачными чернилами", "невидимыми чернилами" и т.п., и может распознаваться главным образом посредством излучения высокочастотных ультрафиолетовых лучей.
[0049] Аппаратная конфигурация устройства удаленного управления Как проиллюстрировано на фиг. 1 и 4, устройство 70 удаленного управления представляет собой компьютер, который управляется оператором таким образом, чтобы выполнять "удаленное вождение" рассматриваемого транспортного средства V, и включает в себя множество мониторов 71, навигационный монитор 72, рулевое колесо 73, педаль 74 акселератора, педаль 75 тормоза и множество рабочих переключателей 76 в качестве специальной аппаратной конфигурации.
Устройство 70 удаленного управления дополнительно может включать в себя такие компоненты, как динамик, микрофон и рычаг переключения передач.
[0050] Мониторы 71 и навигационный монитор 72 представляют собой модули отображения, которые выводят визуальную информацию для выполнения "удаленного вождения", и мониторы 71 отображают синтезированное видео (синтезированное изображение), полученное посредством синтезирования внешних видео рассматриваемого транспортного средства V, полученных посредством множества устройств 11a-11i захвата изображений, на основе предварительно определенной информации макета.
Предварительно определенная информация макета, например, представляет собой режим отображения макета, который не создает мертвую зону для оператора и является простым в работе для оператора. В это время, множество фрагментов информации макета, включающих в себя предварительно определенную информацию макета, могут ассоциироваться между собой посредством идентификатора макета (идентификационной информации макета) и сохраняться в модуле 100 хранения устройства 1 управления движением транспортного средства. В этом случае, когда операция изменения предварительно определенной информации макета выполняется с использованием рабочих переключателей 76 и т.п., измененный идентификатор макета передается из устройства 70 удаленного управления в устройство 1 управления движением транспортного средства.
Устройство 1 управления движением транспортного средства формирует синтезированное видео, полученное посредством синтезирования внешних видео на основе информации макета, соответствующей измененному идентификатору макета, и передает синтезированное видео в устройство 70 удаленного управления. Таким образом, синтезированное видео изменяется и отображается на мониторах 71.
[0051] Рулевое колесо 73 представляет собой функциональный модуль, который управляется оператором и используется для того, чтобы регулировать угол поворота при рулении (величину руления) рассматриваемого транспортного средства V.
Педаль 74 акселератора и педаль 75 тормоза представляют собой функциональные модули, которые управляются оператором и используются для того, чтобы регулировать приведение в действие электрического дросселя V2 рассматриваемого транспортного средства V и работу электромагнитного тормозного устройства V3.
Множество рабочих переключателей 76 используются для того, чтобы вводить информацию задания для выполнения, например, "удаленного вождения" пользователем. Например, за счет надлежащих действий, оператора, с рабочими переключателями 76, внешние видео (синтезированное видео) рассматриваемого транспортного средства V могут переключаться на отображение предварительно определенного макета, и режим вождения может переключаться между режимом автономного вождения, режимом относительного вождения и режимом удаленного вождения.
[0052] Функция устройства управления движением транспортного средства
Как проиллюстрировано на фиг. 5, с точки зрения функций, устройство 1 управления движением транспортного средства включает в себя, в качестве основных компонентов, модуль 100 хранения, который сохраняет различные программы и различные данные, модуль 101 получения информации окружения, модуль 102 получения информации позиции (модуль указания позиции), модуль 103 управления вождением (модуль управления движением), модуль 104 обнаружения транспортных средств, модуль 105 связи (первый модуль связи), модуль 106 смены режима, модуль 107 получения скорости движения и модуль 108 видеообработки.
Эти компоненты реализуются посредством CPU, ROM, RAM, HDD, интерфейса связи, различных программ и т.п.
Модуль 100 хранения сохраняет идентификационную информацию транспортного средства для рассматриваемого транспортного средства V, информацию диспетчеризованного намеченного пути движения рассматриваемого транспортного средства V, "данные расстояния между транспортными средствами", проиллюстрированные на фиг. 8 и т.п.
[0053] С точки зрения функций, устройство 50 передачи информации касательно транспортного средства включает в себя, в качестве основных компонентов, модуль 500 хранения, который сохраняет различные программы и различные данные, модуль 501 получения информации позиции, который получает "информацию текущей позиции" целевого транспортного средства FV, и модуль 502 связи, который передает и принимает различные данные в/из устройства 1 управления движением транспортного средства.
Модуль 500 хранения сохраняет "информацию целевого транспортного средства", включающую в себя информацию текущей позиции целевого транспортного средства FV, информацию диспетчеризованного намеченного пути движения и идентификационную информацию транспортного средства.
Модуль 501 получения информации позиции получает "информацию текущей позиции" целевого транспортного средства FV в реальном времени с использованием бортового локатора 51. Посредством сохранения полученной "информации текущей позиции" в модуле 500 хранения, можно записывать траекторию движения (предыдущий намеченный путь движения) целевого транспортного средства FV, на котором монтируется устройство 50 передачи информации касательно транспортного средства, и траектория движения целевого транспортного средства FV сохраняется в модуле 500 хранения.
Модуль 502 связи передает "информацию целевого транспортного средства" в устройство 1 управления движением транспортного средства (устройство 40 бортовой связи) с использованием устройства 52 бортовой связи. Помимо этого, "информация текущей позиции" целевого транспортного средства FV в числе информации целевого транспортного средства передается в реальном времени.
[0054] С точки зрения функций, устройство 70 удаленного управления включает в себя, в качестве основных компонентов, модуль 700 хранения, который сохраняет различные программы и различные данные, модуль 701 связи, который передает и принимает различные данные в/из устройства 1 управления движением транспортного средства, модуль 702 отображения на экране, который отображает внешнее видео рассматриваемого транспортного средства V и информацию касательно транспортного средства на мониторах 71 и отображает контент (например, навигацию транспортного средства) на основе информации текущей позиции рассматриваемого транспортного средства V на навигационном мониторе 72, модуль 703 формирования рабочих данных, который принимает ввод пользовательской операции и формирует рабочие данные, и модуль 704 выдачи уведомлений в отношении пользователя, который уведомляет оператора в отношении пользователя.
[0055] В дальнейшем в этом документе подробно описываются функции устройства 1 управления движением транспортного средства, включенного в рассматриваемое транспортное средство V.
Информация внешнего окружения и информация позиции рассматриваемого транспортного средства
Модуль 101 получения информации окружения получает "информацию окружения (строго говоря, информацию по обнаружению внешнего окружения)" около рассматриваемого транспортного средства V из бортового датчика 10.
В частности, в качестве "информации окружения", внешние видеоданные около рассматриваемого транспортного средства V получаются из устройства 11 захвата изображений, данные результатов обнаружения целевого объекта около рассматриваемого транспортного средства V получаются из радара 12, и данные измерения расстояния, полученные посредством измерения расстояния от лидара 13 до целевого объекта рассматриваемого транспортного средства V, получаются.
В частности, "информация окружения" представляет собой информацию по обнаружению, к примеру, движущегося объекта (другого транспортного средства, пешехода и т.п.) около рассматриваемого транспортного средства V, различных конструкций, формы дороги и т.п., также называется "информацией окружения движения" и включает в себя информацию окружающего трафика, информацию окружения дороги и т.п.
[0056] Модуль 101 получения информации окружения может получать информацию относительно состояния движения целевого транспортного средства FV из бортового датчика 10 в реальном времени в качестве "информации окружения".
"Информация относительно состояния движения" представляет собой информацию относительно операции движения, операции ускорения, операции замедления, операции остановки, операции левого поворота, операции правого поворота, операции перемещения назад и т.п. с постоянной скоростью согласно целевому транспортному средству FV, другими словами, информацию поведения целевого транспортного средства FV (информацию на основе поведения).
Когда модуль 101 получения информации окружения получает информацию относительно состояния движения целевого транспортного средства FV в реальном времени, устройство 1 управления движением транспортного средства может обнаруживать, например, то, что движущееся целевое транспортное средство FV останавливается, то, что остановленное целевое транспортное средство FV начинает движение, то, что целевое транспортное средство FV начинает движение по намеченному пути, отличающемуся от диспетчеризованного намеченного пути движения рассматриваемого транспортного средства V, и т.п. на основе изменения информации относительно состояния движения целевого транспортного средства FV (изменения информации поведения).
В это время, "целевое транспортное средство FV начинает движение по намеченному пути, отличающемуся от диспетчеризованного намеченного пути движения рассматриваемого транспортного средства V (диспетчеризованный намеченный путь движения целевого транспортного средства FV не совпадает с диспетчеризованным намеченным путем движения рассматриваемого транспортного средства V)" определяется посредством определения, представляет собой траектория движения рассматриваемого транспортного средства V диспетчеризованным или нет намеченный путь движения рассматриваемого транспортного средства V, на основе "траектории движения целевого транспортного средства FV", сохраненной в модуле 500 хранения целевого транспортного средства FV, и "траектории движения рассматриваемого транспортного средства V", которая описывается ниже.
[0057] Модуль 101 получения информации окружения дополнительно может получать "управляющую информацию транспортного средства" рассматриваемого транспортного средства V из бортового ECU 30. Примеры "управляющей информации транспортного средства" включают в себя "информацию угла поворота при рулении", полученную из ECU 32 рулевого колеса, "информацию степени открытия дросселя", полученную из ECU 33 акселератора, и "информацию величины нажатия педали тормоза", полученную из ECU 34 тормоза.
[0058] Модуль 102 получения информации позиции получает "информацию текущей позиции" рассматриваемого транспортного средства V из бортового локатора 20.
В частности, модуль 102 получения информации позиции получает GNSS-информацию (информацию GNSS-коррекции) от приемного GNSS-устройства 21, получает информацию угловой скорости и ускорения рассматриваемого транспортного средства V из модуля 22 инерциальных измерений и указывает текущую позицию рассматриваемого транспортного средства V на основе GNSS-информации (информации GNSS-коррекции) и информации угловой скорости и ускорения.
Посредством сохранения полученной "информации текущей позиции" в модуле 100 хранения, можно записывать траекторию движения (предыдущий намеченный путь движения) рассматриваемого транспортного средства V, на котором монтируется устройство 1 управления движением транспортного средства, и траектория движения рассматриваемого транспортного средства V сохраняется в модуле 100 хранения. Траектория движения рассматриваемого транспортного средства V используется для того, чтобы определять, находится или нет рассматриваемое транспортное средство V на диспетчеризованном намеченном пути движения, по которому рассматриваемое транспортное средство V движется, и задавать новый диспетчеризованный намеченный путь движения для направления на диспетчеризованный намеченный путь движения при необходимости.
[0059] "Информация текущей позиции" может представлять собой "абсолютную позицию", вычисленную посредством автономного позиционирования, "относительную позицию", вычисленную посредством относительного позиционирования, либо "скорректированную абсолютную позицию" или "скорректированную относительную позицию", скорректированную на основе "информации угловой скорости и ускорения" рассматриваемого транспортного средства V.
Точность позиционирования для "абсолютной позиции" составляет приблизительно ±10 м, и точность позиционирования для "относительной позиции" составляет приблизительно ±40 см. Точность позиционирования для "скорректированной абсолютной позиции" выше точности позиционирования абсолютной позиции, и точность позиционирования для "скорректированной относительной позиции" составляет приблизительно ±5 см, что является наибольшей точностью позиционирования.
[0060] Способ вычислений информации текущей позиции
Далее описывается пример процесса программы для получения информации позиции транспортного средства (процесса получения информации позиции транспортного средства), выполняемой посредством системы S1 управления движением транспортного средства, со ссылкой на фиг. 6.
Модуль 102а вычисления абсолютной позиции получает "GNSS-информацию", требуемую для автономного позиционирования, через приемное GNSS-устройство 21 и вычисляет "абсолютную позицию" рассматриваемого транспортного средства V посредством автономного позиционирования (этап S01: процесс вычисления абсолютной позиции, этап вычисления абсолютной позиции).
"Абсолютная позиция" рассматриваемого транспортного средства V представляет собой трехмерную позицию рассматриваемого транспортного средства V, полученную посредством приема GNSS-радиоволн из множества искусственных спутников SA, измерения расстояний между искусственными спутниками SA, расположенными в известных точках, и рассматриваемым транспортным средством V и решения уравнения при трехмерной обработке для получения неизвестных точек из измеренных расстояний (соответствующих GNSS-информации).
[0061] На этапе S01, модуль 102b вычисления относительной позиции получает "информацию GNSS-коррекции", требуемую для относительного позиционирования, корректирует "абсолютную позицию" посредством относительного позиционирования и вычисляет "относительную позицию" рассматриваемого транспортного средства V (процесс вычисления относительной позиции, этап вычисления относительной позиции).
"Относительная позиция" рассматриваемого транспортного средства V представляет собой трехмерную позицию рассматриваемого транспортного средства V, которая получается из измеренного расстояния (соответствующего информации GNSS-коррекции) посредством приема GNSS-радиоволн в опорной станции ST, расположенной в известных точках, получения расстояния (расстояния между искусственным спутником SA и рассматриваемым транспортным средством V), имеющего меньшую ошибку измерения, из опорной станции ST.
Способ вычислений "относительной позиции" включает в себя способ вычислений для способа RTK-позиционирования (способа интерферометрического позиционирования) и способ вычислений для способа DGPS-позиционирования (способа относительного позиционирования). Любой способ вычислений может использоваться.
[0062] Модуль 102 с вычисления позиции коррекции получает "информацию угловой скорости и ускорения" рассматриваемого транспортного средства V и вычисляет "скорректированную абсолютную позицию", полученную посредством коррекции абсолютной позиции рассматриваемого транспортного средства V на основе "GNSS-информации" и "информации ускорения и угловой скорости".
"Скорректированная абсолютная позиция" рассматриваемого транспортного средства V представляет собой трехмерную позицию рассматриваемого транспортного средства V, полученную посредством комбинирования GNSS-информации и информации угловой скорости и ускорения (также называемой "IMU-информацией") рассматриваемого транспортного средства V и определения позиции.
Модуль 102 с вычисления позиции коррекции вычисляет "скорректированную относительную позицию", полученную посредством коррекции относительной позиции рассматриваемого транспортного средства V на основе "информации GNSS-коррекции" и "информации ускорения и угловой скорости".
[0063] Модуль 102d определения приема определяет то, может или нет GNSS-информация приниматься в реальном времени (этап S02). Затем, в ответ на определение того, что GNSS-информация может приниматься в реальном времени (этап S02: "Да"), модуль 102d определения приема определяет то, может или нет информация GNSS-коррекции приниматься в реальном времени (этап S03).
В частности, модуль 102d определения приема определяет то, могут или нет радиоволны приниматься от искусственных спутников SA, и то, могут или нет данные передаваться и приниматься в/из опорных станций ST, при условии, что имеется помеха около рассматриваемого транспортного средства V, и радиоволны не могут приниматься от искусственных спутников SA, и данные не могут передаваться и приниматься в/из опорных станций ST.
[0064] В ответ на определение посредством модуля 102d определения приема того, что GNSS-информация и GNSS-информация могут приниматься в реальном времени (этап S03: "Да"), модуль 102 получения информации позиции указывает текущую позицию рассматриваемого транспортного средства V с использованием "скорректированной относительной позиции" с наибольшей точностью позиционирования (этап указания позиции, процесс указания позиции).
В ответ на определение того, что GNSS-информация может приниматься в реальном времени, и информация GNSS-коррекции не может приниматься в реальном времени (этап S03: "Нет"), модуль 102 получения информации позиции указывает текущую позицию рассматриваемого транспортного средства V с использованием "скорректированной абсолютной позиции" с высокой точностью позиционирования.
Дополнительно, в ответ на определение того, что GNSS-информация и информация GNSS-коррекции не могут приниматься в реальном времени (этап S02: "Нет"), модуль 102 получения информации позиции может указывать текущую позицию рассматриваемого транспортного средства V с использованием "оцененной позиции", вычисленной на основе принимаемой самой последней "GNSS-информации" и "информации ускорения и угловой скорости", принимаемой непосредственно перед этим (этап S06).
[0065] Модуль 102 получения информации позиции получает "скорректированную относительную позицию" с наибольшей точностью в качестве "информации позиции" рассматриваемого транспортного средства V. С другой стороны, когда данные не могут передаваться и приниматься в/из опорных станций ST, "скорректированная абсолютная позиция" получается. Альтернативно, когда имеется помеха около рассматриваемого транспортного средства V, и радиоволны не могут приниматься от искусственных спутников SA, "оцененная позиция" получается (этап S07).
После этого текущая позиция рассматриваемого транспортного средства V указывается, рассматриваемое транспортное средство V передает текущую позицию рассматриваемого транспортного средства V в устройство 70 удаленного управления, едущие сзади транспортные средства и устройство 80 администрирования колонн транспортных средств (этап S08).
Информация позиции от начальной позиции движения до конечной позиции движения рассматриваемого транспортного средства V, полученная посредством модуля 102 получения информации позиции, агрегируется, и в силу этого информация фактического намеченного пути движения (также называемая "информацией траектории движения" или "информацией предыстории движения") рассматриваемого транспортного средства V формируется.
Сформированная информация намеченного пути движения (данные намеченного пути движения) рассматриваемого транспортного средства V сохраняется в модуле 100 хранения в ассоциации с информацией относительно даты и времени движения и времени движения, информацией относительно режима вождения рассматриваемого транспортного средства V (например, числом изменений режима вождения и временем выполнения каждого режима вождения), информацией касательно транспортного средства для целевого транспортного средства FV, за которым следует ехать в режиме относительного вождения, и т.п.
[0066] Управление автономным вождением
Модуль 103 управления вождением управляет интегрированным ECU 31 на основе "информации окружения", полученной посредством модуля 101 получения информации окружения, и "информации позиции рассматриваемого транспортного средства V", полученной посредством модуля 102 получения информации позиции, и выполняет "управление автономным вождением" рассматриваемого транспортного средства V.
Чтобы выполнять "управление автономным вождением" рассматриваемого транспортного средства V, модуль 103 управления вождением может получать "информацию касательно транспортного средства" рассматриваемого транспортного средства V из бортового ECU 30 и дополнительно комбинировать "информацию касательно транспортного средства" для того, чтобы управлять интегрированным ECU 31.
[0067] Когда рассматриваемое транспортное средство V начинает движение вдоль диспетчеризованного намеченного пути движения рассматриваемого транспортного средства V, модуль 103 управления вождением выполняет "управление автономным вождением" и начинает автономное вождение рассматриваемого транспортного средства V.
В частности, когда рассматриваемое транспортное средство V начинает движение, рассматриваемое транспортное средство V задается в "режиме автономного вождения", и модуль 103 управления вождением выполняет управление автономным вождением в состоянии, в котором "режим автономного вождения" задается.
После этого, рассматриваемое транспортное средство V движется к пункту назначения диспетчеризованного намеченного пути движения в то время, когда режим вождения рассматриваемого транспортного средства V изменяется между "режимом автономного вождения" и "режимом относительного вождения" посредством модуля 106 смены режима.
Когда целевое транспортное средство FV, за которым следует ехать, обнаруживается в то время, когда рассматриваемое транспортное средство V начинает движение, и информация позиции целевого транспортного средства FV получается в реальном времени, модуль 106 смены режима может изменять "режим автономного вождения" на "режим относительного вождения". В этом случае, модуль 103 управления вождением выполняет управление относительным вождением в состоянии, в котором "режим относительного вождения" задается, и начинает относительное вождение рассматриваемого транспортного средства V относительно целевого транспортного средства FV.
Альтернативно, когда рассматриваемое транспортное средство V начинает движение, "режим удаленного вождения" может задаваться вместо "режима автономного вождения", и модуль 103 управления вождением может выполнять управление удаленным вождением в состоянии, в котором "режим удаленного вождения" задается.
[0068] Модуль 104 обнаружения транспортных средств обнаруживает то, что предварительно определенное едущее впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства V, представляет собой целевое транспортное средство FV, за которым следует ехать по диспетчеризованному намеченному пути движения рассматриваемого транспортного средства V (см. фиг. 7В).
"Целевое транспортное средство, за которым следует ехать" включает в себя транспортное средство, которое движется по диспетчеризованному намеченному пути движения, который частично совпадает, по меньшей мере, с диспетчеризованным намеченным путем движения рассматриваемого транспортного средства V, и транспортное средство, которое движется по намеченному пути, идентичному диспетчеризованному намеченному пути движения рассматриваемого транспортного средства V, при постоянном расстоянии движения (времени движения).
"Целевое транспортное средство, за которым следует ехать" включает в себя, например, транспортное средство, которое движется около рассматриваемого транспортного средства V при движении по шоссе, общей дороге и т.п., имеющей точку разветвления, при постоянном расстоянии движения (времени движения).
[0069] В частности, модуль 104 обнаружения транспортных средств обнаруживает то, что предварительно определенное едущее впереди транспортное средство представляет собой целевое транспортное средство FV, на основе результатов распознавания идентификационных меток 60 едущего впереди транспортного средства, распознанных посредством устройств 11 захвата изображений.
Например, когда первая идентификационная метка 60а целевого транспортного средства FV распознается, модуль 104 обнаружения транспортных средств обнаруживает то, что целевое транспортное средство FV присутствует в позиции спереди рассматриваемого транспортного средства V.
Альтернативно, когда седьмая идентификационная метка 60д целевого транспортного средства FV распознается, модуль 104 обнаружения транспортных средств обнаруживает то, что целевое транспортное средство FV присутствует в правой позиции рассматриваемого транспортного средства V.
[0070] Более конкретно, посредством получения результатов распознавания идентификационных меток 60а-601 целевого транспортного средства FV из устройств 11 захвата изображений в реальном времени, модуль 104 обнаружения транспортных средств может точно обнаруживать относительную позицию целевого транспортного средства FV относительно рассматриваемого транспортного средства V в реальном времени на основе идентификационной информации транспортного средства (формы и размера целевого транспортного средства FV) для целевого транспортного средства FV и информации позиций меток, встраиваемой в идентификационные метки 60a-601.
Например, устройство 1 управления движением транспортного средства может точно обнаруживать то, что целевое транспортное средство FV движется в позиции спереди немного слева относительно рассматриваемого транспортного средства V, либо то, что целевое транспортное средство FV движется параллельно с рассматриваемым транспортным средством V и движется немного впереди относительно рассматриваемого транспортного средства V и т.п. В этом случае, относительная позиция целевого транспортного средства FV может указываться, например, посредством позиции трехмерных координат, имеющей рассматриваемое транспортное средство V в качестве центральной позиции.
Таким образом, как проиллюстрировано на фиг. 7В, рассматриваемое транспортное средство V может управляться в режиме относительного вождения при поддержании соответствующего расстояния между транспортными средствами между рассматриваемым транспортным средством V и целевым транспортным средством FV. Помимо этого, как проиллюстрировано на фиг. 7С, рассматриваемое транспортное средство V может управляться в режиме автономного вождения таким образом, что рассматриваемое транспортное средство V надлежащим образом обгоняет целевое транспортное средство FV.
[0071] Модуль 104 обнаружения транспортных средств обнаруживает целевое транспортное средство FV на основе результатов распознавания идентификационных меток 60, и целевое транспортное средство FV может обнаруживаться посредством других модулей обнаружения.
Например, модуль 104 обнаружения транспортных средств может получать идентификационную информацию транспортного средства для целевого транспортного средства FV из устройства 50 передачи информации касательно транспортного средства, смонтированного на целевом транспортном средстве FV, через беспроводную связь с использованием устройства 40 бортовой связи, и обнаруживать целевое транспортное средство FV на основе идентификационной информации транспортного средства.
Другими словами, целевое транспортное средство FV может обнаруживаться посредством идентификационных меток 60, присоединяемых к целевому транспортному средству FV, или целевое транспортное средство FV может обнаруживаться через беспроводную связь с устройством 50 передачи информации касательно транспортного средства, смонтированным на целевом транспортном средстве FV.
Изображение номерного знака целевого транспортного средства FV захватывается посредством устройств 11 захвата изображений, модуль 104 обнаружения транспортных средств может считывать информацию лицензии из номерного знака, получать
идентификационную информацию транспортного средства для целевого транспортного средства FV из сервера управления (например, устройства 80 администрирования колонн транспортных средств) по сети и обнаруживать целевое транспортное средство FV на основе идентификационной информации транспортного средства.
[0072] Модуль 105 связи принимает информацию целевого транспортного средства, включающую в себя, по меньшей мере, информацию позиции целевого транспортного средства FV, обнаруженного посредством модуля 104 обнаружения транспортных средств.
В частности, когда модуль 104 обнаружения транспортных средств обнаруживает целевое транспортное средство FV, модуль 105 связи начинает связь с устройством 50 передачи информации касательно транспортного средства через сеть.
Модуль 105 связи принимает информацию позиции целевого транспортного средства FV и информацию диспетчеризованного намеченного пути движения из устройства 50 передачи информации касательно транспортного средства, смонтированного на целевом транспортном средстве FV.
Модуль 501 получения информации позиции устройства 50 передачи информации касательно транспортного средства получает "информацию текущей позиции" целевого транспортного средства FV в реальном времени идентично вышеописанному модулю 102 получения информации позиции.
[0073] Смена режима (автономное вождение → относителвное вождение)
Модуль 106 смены режима изменяет "режим автономного вождения (управление автономным вождением)" на "режим относительного вождения (управление относительным вождением)", когда предварительно определенное условие начала относительного вождения удовлетворяется.
В частности, в случае если управление автономным вождением выполняется в состоянии, в котором "режим автономного вождения" задается так, как проиллюстрировано на фиг. 7А, когда целевое транспортное средство FV обнаруживается посредством модуля 104 обнаружения транспортных средств, и информация целевого транспортного средства принимается посредством модуля 105 связи, модуль 106 смены режима изменяет "режим автономного вождения" на "режим относительного вождения", как проиллюстрировано на фиг. 7В.
Более конкретно, модуль 104 обнаружения транспортных средств определяет то, представляет или нет едущее впереди транспортное средство собой целевое транспортное средство FV, когда едущее впереди транспортное средство обнаруживается в "предварительно определенном условии начала относительного вождения", и распознает едущее впереди транспортное средство в качестве целевого транспортного средства FV в ответ на определение того, что едущее впереди транспортное средство представляет собой целевое транспортное средство FV. Модуль 106 смены режима изменяет "режим автономного вождения" на "режим относительного вождения".
В ответ на определение того, что едущее впереди транспортное средство не представляет собой целевое транспортное средство FV, "предварительно определенное условие начала относительного вождения" не удовлетворяется, даже когда едущее впереди транспортное средство обнаруживается, и в силу этого модуль 106 смены режима не изменяет режим.
Здесь, "целевое транспортное средство FV" представляет собой транспортное средство, которое имеет идентификатор транспортного средства, зарегистрированный заранее посредством устройства 1 управления движением транспортного средства (модуля 100 хранения), смонтированного на рассматриваемом транспортном средстве V, и идентифицируется посредством идентификатора транспортного средства. Когда идентификатор транспортного средства задается для едущего впереди транспортного средства, "предварительно определенное условие начала относительного вождения" удовлетворяется, а когда идентификатор транспортного средства не задается, условие не удовлетворяется.
[0074] В частности, когда целевое транспортное средство FV обнаруживается в случае, если управление автономным вождением выполняется в состоянии, в котором "режим автономного вождения" задается, модуль 106 смены режима задает "режим относительного вождения" в состоянии, в котором "режим автономного вождения" задается. Другими словами, "режим относительного вождения" переключается из активированного состояния в деактивированное состояние, тогда как "режим автономного вождения" переключается в активированное состояние.
В это время, модуль 106 смены режима предпочтительно продолжает "режим автономного вождения" в состоянии, в котором оба режима задаются. Иными словами, модуль 103 управления вождением непрерывно выполняет управление автономным вождением.
Когда информация целевого транспортного средства для целевого транспортного средства FV получается в случае, если управление автономным вождением продолжается в состоянии, в котором оба режима задаются, модуль 106 смены режима предпочтительно выполняет "режим относительного вождения" в состоянии, в котором оба режима задаются. Иными словами, модуль 103 управления вождением заново выполняет управление относительным вождением.
Когда информация целевого транспортного средства для целевого транспортного средства FV не получается в случае, если управление автономным вождением продолжается в состоянии, в котором оба режима задаются, т.е. когда беспроводная связь с устройством 50 передачи информации касательно транспортного средства, смонтированным на целевом транспортном средстве FV, является невозможной, модуль 106 смены режима возвращает "режим относительного вождения", заданный ранее, в незаданное состояние. Другими словами, "режим относительного вождения" возвращается из активированного состояния в деактивированное состояние. В это время, поскольку "режим автономного вождения" остается заданным (в активированном состоянии), модуль 103 управления вождением продолжает выполнять управление автономным вождением.
[0075] Управление относительным вождением
Модуль 103 управления вождением управляет интегрированным ECU 31 на основе "информации окружения", "информации позиции рассматриваемого транспортного средства V" и "информации целевого транспортного средства для целевого транспортного средства FV" и выполняет "управление относительным вождением" рассматриваемого транспортного средства V относительно целевого транспортного средства FV (см. фиг. 7В).
Модуль 103 управления вождением может выполнять подходящее относительное вождение согласно типу целевого транспортного средства FV (форме или размеру, рабочим характеристикам движения, расходу топлива, количеству выхлопных газов и т.п.) посредством дополнительного комбинирования "идентификационной информации транспортного средства для целевого транспортного средства FV", полученной из результата распознавания идентификационных меток 60, и управления интегрированным ECU 31 таким образом, чтобы выполнять "управление относительным вождением".
[0076] "Управление относительным вождением", выполняемое посредством модуля 103 управления вождением, представляет собой процесс управления для указания, на основе "информации позиции целевого транспортного средства FV", включенной в информацию целевого транспортного средства, полученную из целевого транспортного средства FV, информации позиции, в которой рассматриваемое транспортное средство V движется по траектории движения (предыдущему намеченному пути движения), извлеченной на основе информации позиции целевого транспортного средства FV. При управлении относительным вождением, для того, чтобы надлежащим образом обеспечивать расстояние между транспортными средствами между рассматриваемым транспортным средством V и целевым транспортным средством FV на траектории движения, выполняется управление информацией предварительно определенной позиции движения с заданным расстоянием между транспортными средствами согласно скорости движения рассматриваемого транспортного средства V.
В частности, модуль 107 получения скорости движения получает "информацию угловой скорости и ускорения" рассматриваемого транспортного средства V из модуля 22 инерциальных измерений и получает "скорость движения" рассматриваемого транспортного средства V в реальном времени посредством интегрирования ускорения и угловой скорости.
Модуль 103 управления вождением указывает информацию позиции, в которой рассматриваемое транспортное средство V движется, на основе информации позиции целевого транспортного средства FV со ссылкой на "данные расстояния между транспортными средствами", проиллюстрированные на фиг. 8, сохраненные в модуле 100 хранения, и выполняет управление относительным вождением для принудительного движения рассматриваемого транспортного средства V относительно целевого транспортного средства FV на основе информации позиции рассматриваемого транспортного средства V и информации окружения.
При управлении относительным вождением, процесс коррекции информации позиции, указываемой на основе информации позиции целевого транспортного средства FV, и коррекции траектории на основе "информации позиции рассматриваемого транспортного средства V" таким образом, что рассматриваемое транспортное средство V фактически движется. Иными словами, процесс представляет собой процесс коррекции отклонения (ошибки) между информацией позиции относительно позиции, в которой рассматриваемое транспортное средство движется, и информацией позиции относительно позиции, в которой рассматриваемое транспортное средство фактически движется, которые указываются на основе информации позиции относительно целевого транспортного средства FV и коррекции траектории.
Соответственно, траектория движения, вдоль которой фактически движется рассматриваемое транспортное средство V (траектория движения на основе информации позиции рассматриваемого транспортного средства V), сохраняется в модуле 100 хранения.
[0077] "Данные расстояния между транспортными средствами", проиллюстрированные на фиг. 8, представляют собой таблицу данных, указывающую взаимосвязь соответствия между скоростью движения рассматриваемого транспортного средства V и заданным расстоянием между транспортными средствами.
Например, когда скорость движения (средняя скорость движения) рассматриваемого транспортного средства V составляет "80 км/ч", заданное расстояние между транспортными средствами между рассматриваемым транспортным средством V и целевым транспортным средством FV задается равным "от 40 м до 70 м".
"Данные расстояния между транспортными средствами" могут представлять собой графические данные, в которых скорость движения рассматриваемого транспортного средства V берется в качестве оси X, заданное расстояние между транспортными средствами берется в качестве оси Y, и заданное расстояние между транспортными средствами увеличивается пропорционально скорости движения (увеличивается квадратично).
В дополнение к заданию расстояния между транспортными средствами до целевого транспортного средства FV так, как описано выше, временной интервал может задаваться таким образом, что целевое транспортное средство FV движется в позиции за предварительно определенный момент времени до этого (например, за несколько секунд до этого). В этом случае, минимальное расстояние между транспортными средствами может задаваться таким образом, что рассматриваемое транспортное средство V не сталкивается с целевым транспортным средством FV.
[0078] Чтобы вычислять "скорость движения" рассматриваемого транспортного средства V, модуль 107 получения скорости движения может вычислять "скорость" рассматриваемого транспортного средства V посредством обработки "GNSS-информации (информации GNSS-коррекции)" и "информации ускорения и угловой скорости" с использованием фильтра Кермана. Таким образом, "скорость движения" может вычисляться более точно.
Чтобы получать "информацию скорости" рассматриваемого транспортного средства V, датчик скорости вращения колес может заново монтироваться на рассматриваемом транспортном средстве V, и "информация скорости" может получаться через датчик скорости вращения колес.
[0079] Хотя модуль 103 управления вождением выполняет управление относительным вождением на заданном расстоянии между транспортными средствами согласно скорости движения
рассматриваемого транспортного средства V, модуль 103 управления вождением может выполнять управление относительным вождением рассматриваемого транспортного средства V относительно целевого транспортного средства FV на синхронном состоянии между рассматриваемым транспортным средством V и целевым транспортным средством FV (например, в состоянии, в котором рассматриваемое транспортное средство V также движется "на 1 м", когда целевое транспортное средство FV движется "на 1 м").
В случае синхронного состояния, модуль 103 управления вождением может получать информацию окружения около рассматриваемого транспортного средства V, информацию позиции рассматриваемого транспортного средства V и информацию целевого транспортного средства, включающую в себя информацию позиции целевого транспортного средства FV, в реальном времени и комбинировать эти фрагменты информации для того, чтобы выполнять управление относительным вождением.
[0080] Смена режима (относительное вождение → автономное вождение)
Когда целевое транспортное средство выполняет операцию остановки
Когда "предварительно определенное условие согласно состоянию движения" целевого транспортного средства FV удовлетворяется в случае, если управление относительным вождением выполняется в состоянии, в котором "режим относительного вождения" задается так, как проиллюстрировано на фиг. 7В, модуль 106 смены режима изменяет режим относительного вождения на "режим автономного вождения". Модуль 103 управления вождением выполняет управление автономным вождением в "режиме автономного вождения", как проиллюстрировано на фиг. 1С.
"Предварительно определенное условие согласно состоянию движения" представляет собой случай, в котором, для эффективного движения рассматриваемого транспортного средства V, из поведения целевого транспортного средства FV обнаруживается то, что рассматриваемому транспортному средству V необходимо обгонять целевое транспортное средство FV либо необходимо двигаться по намеченному пути, отличающемуся от намеченного пути целевого транспортного средства FV.
"Предварительно определенное условие согласно состоянию движения", например, представляет собой случай, в котором из поведения целевого транспортного средства FV обнаруживается то, что движущееся целевое транспортное средство FV выполняет операцию остановки на обочине (в придорожной зоне) или начинает операцию остановки.
Дополнительно, "предварительно определенное условие согласно состоянию движения", например, представляет собой случай, в котором из поведения целевого транспортного средства FV обнаруживается то, что движущееся целевое транспортное средство FV начинает движение по намеченному пути (в частности, по намеченному пути к остальной области), отличающемуся от диспетчеризованного намеченного пути движения.
Иными словами, "предварительно определенное условие согласно состоянию движения" также может называться "условием прекращения относительного вождения" для прекращения управления относительным вождением рассматриваемого транспортного средства V.
В дальнейшем в этом документе, как проиллюстрировано на фиг. 1С, описывается случай, в котором движущееся целевое транспортное средство FV выполняет операцию остановки на обочине.
[0081] В случае если управление относительным вождением выполняется в состоянии, в котором "режим относительного вождения" задается так, как проиллюстрировано на фиг. 7В, модуль 101 получения информации окружения обнаруживает то, что целевое транспортное средство FV выполняет операцию остановки на обочине (начинает операцию остановки), в качестве информации по обнаружению, связанной с состоянием движения целевого транспортного средства FV.
Модуль 106 смены режима определяет то, что предварительно определенное условие удовлетворяется, когда обнаруживается то, что целевое транспортное средство FV выполняет операцию остановки в обочине на основе результата обнаружения модуля 101 получения информации окружения в качестве предварительно определенного условия согласно состоянию движения целевого транспортного средства FV. "Режим относительного вождения" изменяется на "режим автономного вождения".
Модуль 103 управления вождением выполняет управление автономным вождением в "режиме автономного вождения". В частности, управление автономным вождением рассматриваемого транспортного средства V выполняется для того, чтобы обгонять целевое транспортное средство FV, как проиллюстрировано на фиг. 1С при выяснении информации окружения движения около рассматриваемого транспортного средства V.
Поскольку "режим автономного вождения" остается заданным в нормальное состояние (активированное состояние), модуль 103 управления вождением может плавно переключаться из управления относительным вождением на управление автономным вождением.
[0082] Когда целевое транспортное средство отделяется в точке разветвления
В дополнение к вышеуказанным условиям, когда предварительно определенное условие согласно диспетчеризованному намеченному пути движения целевого транспортного средства FV удовлетворяется в случае, если управление относительным вождением выполняется в состоянии, в котором "режим относительного вождения" задается, модуль 106 смены режима изменяет режим относительного вождения на "режим автономного вождения". Модуль 103 управления вождением выполняет управление автономным вождением в "режиме автономного вождения".
"Предварительно определенное условие согласно диспетчеризованному намеченному пути движения" представляет собой случай, в котором обнаруживается то, что диспетчеризованный намеченный путь движения целевого транспортного средства FV и диспетчеризованный намеченный путь движения рассматриваемого транспортного средства V не совпадают.
Например, предполагается, что диспетчеризованный намеченный путь движения целевого транспортного средства FV получается заранее, и диспетчеризованные намеченные пути движения не совпадают, либо диспетчеризованный намеченный путь движения целевого транспортного средства FV изменяется, и измененные диспетчеризованные намеченные пути движения не совпадают.
В дальнейшем в этом документе описывается случай, в котором целевое транспортное средство FV и рассматриваемое транспортное средство V отделяются в точке разветвления.
[0083] Модуль 105 связи принимает "информацию целевого транспортного средства", включающую в себя информацию позиции целевого транспортного средства FV и информацию диспетчеризованного намеченного пути движения, из устройства 50 передачи информации касательно транспортного средства.
В случае если управление относительным вождением выполняется в состоянии, в котором "режим относительного вождения" задается так, как проиллюстрировано на фиг. 7В, когда обнаруживается то, что оба из диспетчеризовэнных намеченных путей движения не совпадают, на основе информации целевого транспортного средства, полученной посредством модуля 105 связи, модуль 106 смены режима считает, что "предварительно определенное условие согласно состоянию движения" удовлетворяется. Режим относительного вождения изменяется на "режим автономного вождения".
Модуль 103 управления вождением выполняет управление автономным вождением в "режиме автономного вождения". В частности, управление автономным вождением рассматриваемого транспортного средства V начинается отдельно от целевого транспортного средства FV в предварительно определенной точке разветвления.
[0084] При вышеуказанной конфигурации, можно реализовывать устройство 1 управления движением транспортного средства, в котором рассматриваемое транспортное средство V может двигаться относительно целевого транспортного средства FV, и состояние вождения рассматриваемого транспортного средства V может изменяться при необходимости.
Помимо этого, посредством использования устройства 1 управления движением транспортного средства, можно принимать информацию позиции целевого транспортного средства FV в реальном времени и переключаться между "управлением автономным вождением" и "управлением относительным вождением" согласно поведению (изменению состояния движения) целевого транспортного средства FV.
[0085] Управление удаленным вождением Далее описывается "управление удаленным вождением". Модуль 108 видеообработки получает внешние видеоданные рассматриваемого транспортного средства V из множества устройств 11a-11i захвата изображений и формирует синтезированное видео (синтезированные видеоданные), полученное посредством синтезирования внешних видео на основе предварительно определенной информации макета.
Посредством формирования синтезированного видео и передачи сформированных синтезированных видеоданных в устройство 70 удаленного управления, затраты на обмен данными могут уменьшаться по сравнению со случаем передачи множества фрагментов внешних видеоданных.
[0086] Модуль 105 связи выполняет передачу и прием данных между устройством 1 управления движением транспортного средства и устройством 70 удаленного управления с использованием устройства 40 бортовой связи.
В частности, модуль 105 связи передает "информацию окружения", полученную посредством модуля 101 получения информации окружения, и "информацию текущей позиции", полученную посредством модуля 102 получения информации позиции, в устройство 70 удаленного управления в качестве информации, требуемой для "удаленного вождения" рассматриваемого транспортного средства V.
Модуль 105 связи принимает "информацию операций вождения" рассматриваемого транспортного средства V из устройства 70 удаленного управления, которое принимает пользовательский ввод оператором.
Модуль 103 управления вождением управляет интегрированным ECU 31 на основе "информации операций вождения" рассматриваемого транспортного средства V, полученной из устройства 70 удаленного управления, и выполняет "управление удаленным вождением" рассматриваемого транспортного средства V.
[0087] При вышеуказанной конфигурации, можно реализовывать устройство 1 управления движением транспортного средства, допускающее выполнение "управления удаленным вождением", при котором оператор удаленно управляет рассматриваемым транспортным средством V таким образом, чтобы заставлять рассматриваемое транспортное средство V двигаться.
Следовательно, также можно переключаться между "управлением удаленным вождением" и "управлением относительным вождением" согласно поведению целевого транспортного средства FV. Когда "управление удаленным вождением" переключается на "управление относительным вождением, оператор прекращает выполнять операцию относительного вождения рассматриваемого транспортного средства V.
[0088] Способ управления движением транспортного средства Далее описывается пример процесса программы для управления движением транспортного средства (способа управления движением транспортного средства), выполняемой посредством системы S1 управления движением транспортного средства, со ссылкой на фиг. 9.
Программа согласно настоящему варианту осуществления представляет собой программу для реализации модуля 101 получения информации окружения, модуля 102 получения информации позиции, модуля 103 управления вождением (модуля управления движением), модуля 104 обнаружения транспортных средств, модуля 105 связи, модуля 106 смены режима, модуля 107 получения скорости движения и модуля 108 видеообработки, описанных выше в качестве функциональных компонентов устройства 1 управления движением транспортного средства, включающего в себя модуль 100 хранения, и CPU устройства 1 управления движением транспортного средства выполняет программу для управления движением транспортного средства.
Программа выполняется посредством приема управляющей инструкции от пользователя (в частности, водителя рассматриваемого транспортного средства V или внешнего оператора).
[0089] В последовательности операций управления движением транспортного средства, проиллюстрированной на фиг. 9, во-первых, устройство 1 управления движением транспортного средства начинает с этапа S101, на котором задается "режим автономного вождения", когда рассматриваемое транспортное средство V начинает движение.
Устройство 1 управления движением транспортного средства может задавать "режим вождения с помощью удаленной операции" вместо "режима автономного вождения".
Когда "режим вождения с помощью удаленной операции" временно задается, модуль 103 управления вождением выполняет управление вождением с помощью удаленной операции рассматриваемого транспортного средства V на этапе S103, который описывается ниже.
[0090] Затем, на этапе S102, модуль 101 получения информации окружения начинает получение "информации окружении" около рассматриваемого транспортного средства V, и модуль 102 получения информации позиции начинает получение "информации позиции рассматриваемого транспортного средства V". Модуль 102 получения информации позиции получает "информацию позиции рассматриваемого транспортного средства V" посредством "процесса получения информации текущей позиции", проиллюстрированного на фиг. 6.
На этапе S103, модуль 103 управления вождением управляет интегрированным ECU 31 на основе информации окружения и информации позиции рассматриваемого транспортного средства V и выполняет "управление автономным вождением" рассматриваемого транспортного средства V (см. фиг. 7А).
[0091] Затем, на этапе S104, модуль 104 обнаружения транспортных средств обнаруживает то, представляет или нет предварительно определенное едущее впереди транспортное средство собой целевое транспортное средство FV, за которым следует ехать по диспетчеризованному намеченному пути движения рассматриваемого транспортного средства V.
В частности, модуль 104 обнаружения транспортных средств определяет, на основе предварительно определенного условия начала относительного вождения, то, представляет или нет едущее впереди транспортное средство собой целевое транспортное средство FV, на основе результатов распознавания идентификационных меток 60 предварительно определенного едущего впереди транспортного средства, распознанных посредством устройств 11 захвата изображений.
Когда модуль 104 обнаружения транспортных средств определяет то, что едущее впереди транспортное средство представляет собой целевое транспортное средство FV, посредством удовлетворения предварительно определенному условию начала относительного вождения (этап S104: "Да"), процесс переходит к этапу S105. С другой стороны, когда модуль 104 обнаружения транспортных средств не определяет то, что предварительно определенное условие начала относительного вождения не удовлетворяется, и едущее впереди транспортное средство представляет собой целевое транспортное средство FV (этап S104: "Нет"), процесс возвращается к этапу S102. Иными словами, управление автономным вождением в "режиме автономного вождения" продолжается.
[0092] Затем, на этапе S105, модуль 106 смены режима задает "режим относительного вождения" в состоянии, в котором "режим автономного вождения" задается. Другими словами, "режим относительного вождения" изменяется из деактивированного состояния на активированное состояние, тогда как "режим автономного вождения" задается в качестве активированного состояния.
[0093] Затем, на этапе S106, модуль 105 связи пытается принимать "информацию целевого транспортного средства", включающую в себя "информацию позиции целевого транспортного средства FV", обнаруженного посредством модуля 104 обнаружения транспортных средств.
В частности, модуль 105 связи начинает связь с устройством 50 передачи информации касательно транспортного средства, смонтированным на целевом транспортном средстве FV, через сеть, и пытается принимать информацию позиции целевого транспортного средства FV из устройства 50 передачи информации касательно транспортного средства.
[0094] Когда модуль 105 связи принимает информацию позиции целевого транспортного средства FV из целевого транспортного средства FV (этап S106: "Да"), процесс переходит к этапу S107. Модуль 103 управления вождением управляет интегрированным ECU 31 на основе "информации окружения", "информации позиции рассматриваемого транспортного средства V" и "информации целевого транспортного средства для целевого транспортного средства FV" и выполняет "управление относительным вождением" рассматриваемого транспортного средства V относительно целевого транспортного средства FV (см. фиг. 7В).
С другой стороны, когда модуль 105 связи не принимает информацию позиции целевого транспортного средства FV (этап S106: "Нет"), процесс переходит к этапу S108. Модуль 106 смены режима изменяет "режим относительного вождения" из активированного состояния на деактивированное состояние и прекращает "режим относительного вождения" в состоянии, в котором "режим автономного вождения" задается, и процесс возвращается к этапу S102.
[0095] Затем, на этапе S109, модуль 106 смены режима определяет то, удовлетворяет или нет целевое транспортное средство FV "предварительно определенному условию" в случае, если управление относительным вождением выполняется в состоянии, в котором "режим относительного вождения" задается.
В частности, модуль 106 смены режима определяет то, удовлетворяет или нет целевое транспортное средство FV "предварительно определенному условию согласно состоянию движения", либо то, удовлетворяет или нет целевое транспортное средство FV "предварительно определенному условию согласно диспетчеризованному намеченному пути движения".
В ответ на определение того, что либо "предварительно определенное условие согласно состоянию движения", либо "предварительно определенное условие согласно диспетчеризованному намеченному пути движения" целевого транспортного средства FV удовлетворяется, модуль 106 смены режима определяет то, что "предварительно определенное условие" удовлетворяется.
[0096] В ответ на определение того, что целевое транспортное средство FV удовлетворяет "предварительно определенному условию" (этап S109: "Да"), процесс переходит к этапу S110, и модуль 106 смены режима изменяет "режим относительного вождения" из активированного состояния на деактивированное состояние и прекращает режим.
На этапе S111, модуль 103 управления вождением выполняет управление автономным вождением в "режиме автономного вождения", как проиллюстрировано на фиг. 1С.
Например, когда "предварительно определенное условие согласно состоянию движения" удовлетворяется посредством обнаружения того, что движущееся целевое транспортное средство FV выполняет операцию остановки, модуль 106 смены режима прекращает "режим относительного вождения", и модуль 103 управления вождением переключает управление относительным вождением, чтобы выполнять управление автономным вождением.
С другой стороны, в ответ на определение того, что целевое транспортное средство FV не удовлетворяет "предварительно определенному условию" (этап S109: "Нет"), процесс возвращается к этапу S107.
[0097] В завершение, на этапе S112, когда устройство 1 управления движением транспортного средства определяет то, что рассматриваемое транспортное средство V прибывает в пункт назначения, либо то, что управление автономным вождением согласно режиму автономного вождения должно завершаться (этап S112: "Да"), процесс по фиг. 9 завершается.
С другой стороны, когда устройство 1 управления движением транспортного средства продолжает выполнять управление вождением рассматриваемого транспортного средства V (этап S112: "Нет"), процесс возвращается к этапу S102.
[0098] При конфигурации программы для управления движением транспортного средства, рассматриваемое транспортное средство V может двигаться относительно целевого транспортного средства FV, и состояние вождения рассматриваемого транспортного средства V может изменяться при необходимости.
Дополнительно, можно принимать информацию позиции целевого транспортного средства FV в реальном времени и переключаться между "управлением автономным вождением" и "управлением относительным вождением" согласно поведению целевого транспортного средства FV.
[0099] Система администрирования колонн транспортных средств
Посредством использования системы S1 управления движением транспортного средства, множество рассматриваемых транспортных средств V находят целевое транспортное средство FV, за которым следует ехать, и переключение "управления автономным вождением" и "управления относительным вождением" повторяется для того, чтобы формировать множество колонн (групп транспортных средств), включающих в себя множество транспортных средств. Колонна в это время может распознаваться как формируемая во внешней форме посредством "управления автономным вождением" и "управления относительным вождением" между транспортными средствами.
Когда множество колонн, имеющих близкие пункты назначения, намеченные пути в пункт назначения и скорости движения, движутся, экономия трудовых ресурсов и улучшение расхода топлива могут ожидаться посредством слияния колонн.
В дальнейшем в этом документе описываются устройство 80 администрирования колонн транспортных средств и система S администрирования колонн транспортных средств, которые управляют множеством колонн F, сформированных посредством системы S1 управления движением транспортного средства, и соединяют колонны, со ссылкой на фиг. 1 и 10-17.
[0100] В системе S1 управления движением транспортного средства, функции рассматриваемого транспортного средства V и целевого транспортного средства FV описываются отдельно, и предполагается, что каждое транспортное средство С, формирующее колонну F, также имеет функцию, в которой рассматриваемое транспортное средство V служит в качестве целевого транспортного средства FV. Иными словами, транспортное средство С, управляемое посредством системы S администрирования колонн транспортных средств, включает в себя устройство 1 управления движением транспортного средства, бортовой датчик 10, бортовой локатор 20, бортовой ECU 30 и устройство 40 бортовой связи и включает в себя устройство 50 передачи информации касательно транспортного средства и идентификационную метку 60. Соответственно, также можно переключать рассматриваемое транспортное средство V и целевое транспортное средство FV друг на друга и продолжать движение. В дальнейшем в этом документе описывается случай, в котором рассматриваемое транспортное средство V, имеющее функцию целевого транспортного средства FV, служит в качестве транспортного средства С.
[0101] Транспортное средство С автоматически идентифицирует целевое транспортное средство FV и едет за целевым транспортным средством FV посредством системы S1 управления движением транспортного средства, и водитель может непосредственно указывать транспортное средство, за которым следует ехать, и ехать за транспортным средством. Например, информация касательно транспортного средства принимается из транспортного средства, которое движется около транспортного средства С, и водитель указывает транспортное средство, за которым следует ехать, на основе информации касательно транспортного средства, отображаемой на дисплее, предоставленном в транспортном средстве С. В этом случае, также можно запрещать следование или привлекать внимание на основе разности в размерном классе транспортного средства или информации относительно диспетчеризованного намеченного пути движения транспортного средства.
[0102] Также можно задавать заранее то, выполняет или нет каждое транспортное средство С вождение в режиме "ехать за". То, следует или нет выполнять вождение в режиме "ехать за" (включение/выключение), может задаваться вручную. Дополнительно, то, следует или нет выполнять вождение в режиме "ехать за", может автоматически задаваться посредством устройства 1 управления движением транспортного средства, определяющего тип и вес груза, погруженного на транспортном средстве С, посредством регистрации информации относительно груза водителем.
[0103] Аппаратная конфигурация устройства администрирования колонн транспортных средств
Как проиллюстрировано на фиг. 1, устройство 80 администрирования колонн транспортных средств представляет собой компьютер для администрирования движения группы колонн F, сформированных посредством множества транспортных средств С. Как проиллюстрировано на фиг. 10, устройство 80 администрирования колонн транспортных средств включает в себя CPU, служащий в качестве устройства управления и вычисления данных, и интерфейс связи, который передает и принимает информационные данные в/из ROM, RAM и HDD (SSD), служащие в качестве устройства хранения данных, через сеть. Дополнительно, устройство 80 администрирования колонн транспортных средств включает в себя устройство 81 связи, которое обменивается данными с внешним устройством.
Устройство хранения данных устройства 80 администрирования колонн транспортных средств сохраняет программу для администрирования колонн транспортных средств в дополнение к основной программе, которая выполняет необходимые функции в качестве компьютера. Посредством выполнения этих программ посредством CPU, демонстрируются функции устройства 80 администрирования колонн транспортных средств.
[0104] Функция устройства администрирования колонн транспортных средств С точки зрения функций, описанных со ссылкой на фиг. 10, устройство 80 администрирования колонн транспортных средств включает в себя, в качестве основных компонентов, модуль 800 хранения, который сохраняет различные программы и различные данные, модуль 801 связи (второй модуль связи), который передает и принимает различные данные в/из устройства 1 управления движением транспортного средства для транспортного средства С, модуль 802 администрирования, который администрирует состояние движения каждого транспортного средства С, подвергнутого управлению движением посредством устройства 1 управления движением транспортного средства на основе информации позиции транспортного средства С, полученной через связь с устройством 1 управления движением транспортного средства для транспортного средства С, и модуль 803 управления состояниями, который управляет состоянием движения транспортного средства С, администрируемого посредством модуля 802 администрирования.
[0105] Модуль 803 управления состояниями включает в себя модуль 804 определения, модуль 805 принятия решений, модуль 806 обработки инструкций и модуль 807 управления соединениями. Модуль 804 определения определяет то, разрешается или нет соединение между колоннами F, на основе состояния движения транспортного средства С. Модуль 805 принятия решений принимает решение в отношении режима соединения между колоннами F на основе результата определения модуля 804 определения. Модуль 806 обработки инструкций передает информацию относительно режима соединения, решенного посредством модуля 805 принятия решений, во впереди идущее транспортное средство Ct каждой колонны F. Модуль 807 управления соединениями управляет соединением между колоннами F через связь с впереди идущим транспортным средством Ct, инструктированным посредством модуля 806 обработки инструкций.
Эти компоненты реализуются посредством CPU, ROM, RAM, HDD, интерфейса связи, различных программ и т.п., проиллюстрированных на фиг. 10.
В дальнейшем в этом документе подробно описывается каждая функция устройства 80 администрирования колонн транспортных средств. Устройство 80 администрирования колонн транспортных средств предоставляет транспортным средствам информацию, требуемую для определения, может или нет группа колонн F соединяться, разрешение на соединение, администрирование состояния соединения и соединения, и реализуется посредством функций, которые описываются ниже. С учетом появления, в системе S администрирования колонн транспортных средств согласно настоящему варианту осуществления, транспортные средства соединяются между собой в форме колонны, но каждое транспортное средство С фактически выполняет управление вождением, такое как автоматизированное вождение или вождение в режиме "ехать за", чтобы формировать группу колонн, и устройство 80 администрирования колонн транспортных средств не выдает инструкцию непосредственно в каждое транспортное средство С, чтобы формировать колонну F.
[0106] Модуль связи
Модуль 801 связи обменивается данными с модулем 105 связи (первым модулем связи) устройства 1 управления движением транспортного средства, включенного в каждое из транспортных средств С, формирующих колонну F, и принимает "информацию текущей позиции", передаваемую посредством модуля 105 связи. Модуль 801 связи принимает "информацию текущей позиции" транспортного средства С и сохраняет информацию в модуле 800 хранения. Модуль 801 связи дополнительно может получать "информацию касательно транспортного средства" из транспортного средства С. "Информация касательно транспортного средства" включает в себя такую информацию, как: идентификационная информация (идентификатор транспортного средства) транспортного средства С; тип транспортного средства; размерный класс транспортного средства; и полная ширина, полная высота, полная длина, рабочий объем двигателя (выходная мощность электромотора), пассажировместимость и вес транспортного средства, которые записываются в акте техосмотра транспортного средства.
"Информация касательно транспортного средства" может включать в себя такую информацию, как пункт назначения, который не изменяется в ходе операции, но изменяется для каждой операции, диспетчеризованный намеченный путь движения в пункт назначения, содержимое и вес погрузки и число пассажиров.
[0107] "Информация касательно транспортного средства" может включать в себя информацию, которая изменяется в ходе движения, например, режим вождения (режим автономного вождения или рабочий режим удаленного вождения), изображения рассматриваемого транспортного средства, захваченные посредством устройств 11 захвата изображений, смонтированных на транспортном средстве С, информацию относительно оставшегося топлива и информацию относительно целевого транспортного средства, за которым следует ехать.
В качестве "информации касательно транспортного средства" может получаться информация сбоя (разъединение проводки электронной схемы, анормальные сигналы из различных датчиков и т.п.), обнаруженная посредством бортового диагностического устройства (OBD), смонтированного на транспортном средстве С.
В дальнейшем в этом документе, "информация текущей позиции" и "информация касательно транспортного средства", принимаемая из каждого транспортного средства С, совместно называются "информацией по движению".
[0108] Помимо этого, модуль 801 связи, например, может выполнять обмен информацией с внешним сервером (не проиллюстрирован) и принимать самую последнюю информацию дорожного движения, погодную информацию и т.п. (в дальнейшем в этом документе, "информацию внешних факторов") из внешнего сервера.
"Информация по движению" и "информация внешних факторов", принимаемая посредством модуля 801 связи, сохраняются в модуле 800 хранения.
[0109] Модуль администрирования
Модуль 802 администрирования устройства 80 администрирования колонн транспортных средств администрирует состояние движения транспортного средства С на основе "информации текущей позиции", принимаемой посредством модуля 801 связи. В частности, модуль 802 администрирования администрирует информацию относительно операции движения, операции ускорения, операции замедления, операции остановки, операции левого поворота, операции правого поворота, операция перемещения назад и т.п. с постоянной скоростью согласно транспортному средству С, другими словами, информацию поведения (информацию на основе поведения) транспортного средства С.
Посредством использования модуля 801 связи для того, чтобы получать "информацию текущей позиции" транспортного средства С в реальном времени, модуль 802 администрирования может обнаруживать, например, то, что движущееся транспортное средство С останавливается, то, что остановленное транспортное средство С начинает движение, и то, что транспортное средство С начинает движение по намеченному пути, отличающемуся от диспетчеризованного намеченного пути движения, на основе изменения информации относительно состояния движения транспортного средства С (изменения информации поведения).
[0110] Модуль 802 администрирования администрирует "информацию колонн" для колонны F. "Информация колонн" представляет собой информацию, указывающую состояние колонны F, и включает в себя типы транспортных средств С, составляющих колонну, идентификационную информацию, число транспортных средств С, составляющих колонну, и т.п. Модуль 802 администрирования может вычислять длину колонны F или расстояние между транспортными средствами с использованием принимаемой "информации текущей позиции" и т.п. транспортных средств С и администрировать вычисленную длину и расстояние в качестве информации колонн. Помимо этого, информация относительно впереди идущего транспортного средства Ct колонны F, идентификационная информация, режим вождения, пункт назначения, диспетчеризованный намеченный путь движения и т.п. может включаться в себя.
[0111] То, принадлежит или нет транспортное средство С колонне F, определяется на основе того, составляет или нет расстояние CD (см. фиг. 12) между приемными GNSS-устройствами 21, смонтированными на транспортном средстве С (на впереди идущем транспортном средстве Ct2), движущемся впереди, и на транспортном средстве С, движущемся позади, в пределах предварительно определенного расстояния D согласно скорости движения. Предварительно определенное расстояние D задается равным, например, расстоянию между транспортными средствами х 1,5 согласно скорости движения.
Расстояние FD (см. фиг. 12) между колонной F, движущейся впереди, и колонной F, движущейся позади, вычисляется из разности между позицией приемного GNSS-устройства 21 едущего самым последним транспортного средства Се (едущего самым последним транспортного средства) передней колонны Ff (второй колонны), движущейся впереди, и позицией приемного GNSS-устройства 21 впереди идущего транспортного средства Ct1 задней колонны Fr (первой колонны), движущейся позади передней колонны Ff. Позиция (информация текущей позиции) приемного GNSS-устройства 21 может указываться с использованием IMU-информации и способа RTK-позиционирования.
[0112] Модуль 802 администрирования может администрировать "информацию колонн" на колонне F и передавать "информацию колонн" в транспортные средства С, составляющие колонну F. Каждое из транспортных средств С может распознавать, на основе принимаемой "информации колонн", то, что колонна F формируется, и то, в какой позиции (в порядке в колонне) рассматриваемое транспортное средство движется внутри всей колонне F. Например, можно выяснять то, представляет или нет рассматриваемое транспортное средство собой впереди идущее транспортное средство Ct колонны F, то, представляет или нет рассматриваемое транспортное средство собой промежуточное транспортное средство, движущееся в колонне, то, каким по номеру движется рассматриваемое транспортное средство относительно впереди идущего транспортного средства Ct, и то, представляет или нет рассматриваемое транспортное средство собой едущее самым последним транспортное средство Се.
[0113] Модуль 802 администрирования может формировать, на основе информации изображений, принимаемой из транспортных средств С, составляющих колонну F, видео, к которому обращается оператор, который удаленно управляет впереди идущим транспортным средством Ct. Видео, к которому следует обращаться, предпочтительно представляет собой видео, из которого может выясняться состояние движения всей колонны F. Например, как проиллюстрировано на фиг. 13, информация изображений из устройств 11 захвата изображений, смонтированных на впереди идущем транспортном средстве Ct и едущем самым последним транспортном средстве Се колонны F, получается для того, чтобы формировать синтезированное изображение Р (изображение колонны, синтезированное видео). В это время, с тем чтобы уменьшать объем данных, которые должны передаваться и приниматься, предпочтительно не использовать информацию изображений из промежуточного транспортного средства в колонне.
[0114] Модуль хранения
Модуль 800 хранения сохраняет "информацию по движению" и "информацию внешних факторов", принимаемую посредством модуля 801 связи, как описано выше, и "информацию колонн", администрируемую посредством модуля 802 администрирования.
Помимо этого, модуль 800 хранения сохраняет "способ соединения" для соединения колонн на основе "информации по движению". В качестве "способа соединения", например, предусмотрен способ, в котором когда передняя колонна Ff уменьшает скорость движения, а задняя колонна Fr увеличивает скорость движения, интервал между колоннами уменьшается, и после этого, когда интервал равен или меньше постоянного интервала, транспортное средство С передней колонны Ff и транспортное средство С задней колонны Fr движутся на идентичной скорости движения.
Модуль 800 хранения также регистрирует режим вождения впереди идущего транспортного средства Ct колонны F согласно "способу соединения".
[0115] Модуль 800 хранения сохраняет, в качестве "условия запрета соединений между колоннами", условие для невыполнения соединения между колоннами, используемое, когда модуль 804 определения определяет то, разрешается или нет соединение между колоннами.
Примеры "условия запрета соединений между колоннами" включают в себя следующие условия.
Условие запрета согласно информации внешних факторов
(1) Когда дорога, по которой осуществляется движение, находится в заторе.
(2) Когда условие риска вследствие климата удовлетворяется, например, идет снег или дождь.
То, находится или нет дорога в заторе, определяется на основе информации дорожного движения, принимаемой из внешнего сервера. Информация относительно информации климата может определяться на основе информации, принимаемой из внешнего сервера, либо может определяться на основе информации окружения, полученной из транспортного средства С.
Условие запрета согласно информации по движению и информации колонн
(3) Когда расстояние FD между колоннами равно или выше предварительно определенного расстояния.
(4) Когда времена прибытия в пункт назначения существенно отличаются.
(5) Когда разность скоростей между колоннами больше порогового значения.
(6) Когда диспетчеризованные намеченные пути движения колонн отличаются.
(7) Когда имеется диспетчеризованный намеченный путь движения, общий для колонн, но оставшийся общий диспетчеризованный намеченный путь движения короче предварительно определенного расстояния.
(8) Когда грузоподъемность или вес транспортного средства, включенный в информацию касательно транспортного средства, превышает определенное значение.
(9) Когда транспортное средство С колонны F не соответствует информации касательно транспортного средства, заданной в сегменте с управляемым соединением.
[0116] "Сегмент с управляемым соединением" представляет собой сегмент, в котором разрешение или отклонение соединения задается на основе информации колонн и информации касательно транспортного средства для транспортных средств С, составляющих колонну. Например, условия, такие как условие, согласно которому соединение разрешается, когда длина колонны составляет 25 м или меньше, и размерный класс транспортного средства представляют собой обычное транспортное средство, и условие, согласно которому соединение разрешается, когда длина колонны составляет 40 м или меньше, размерный класс транспортного средства представляет собой тяжелое транспортное средство, и общий вес колонны составляет 60 т или меньше, задаются для каждого сегмента. Сегмент с управляемым соединением, заданный на дороге, информация касательно транспортного средства, заданная в сегменте и т.п., могут сохраняться в модуле 800 хранения заранее.
[0117] Модуль 803 управления состояниями управляет состоянием движения транспортного средства С, администрируемого посредством модуля 802 администрирования. Как описано выше, модуль 803 управления состояниями включает в себя модуль 804 определения, модуль 805 принятия решений, модуль 806 обработки инструкций и модуль 807 управления соединениями.
[0118] Модуль 804 определения определяет то, разрешается или нет соединение между колоннами F, на основе состояния движения транспортного средства С, администрируемого посредством модуля 802 администрирования.
Определение в отношении того, разрешается или нет соединение, выполняется посредством подтверждения сначала того, разрешается или нет соединение для впереди идущего транспортного средства Ct колонны F, запрошенной на предмет соединения. Когда колонна F, запрошенная на предмет соединения, не разрешает соединение, впереди идущее транспортное средство Ct передает сигнал для отклонения соединения в устройство 80 администрирования колонн транспортных средств. В случае если колонна F отклоняет соединение, например, предусмотрен случай, в котором ценный предмет, опасный предмет и т.п. включается в погрузку некоторых транспортных средств С.
Когда колонна F, запрошенная на предмет соединения, разрешает соединение, модуль 804 определения определяет то, разрешается или нет соединение, на основе состояния движения. В частности, устройство 80 администрирования колонн транспортных средств получает колонну F и состояние движения (информацию по движению, информацию колонн и информацию внешних факторов) каждого транспортного средства С и определяет то, что состояние движения не соответствует "условию запрета соединений между колоннами", сохраненному в модуле 800 хранения.
[0119] Модуль 805 принятия решений принимает решение в отношении режима соединения между колоннами F на основе результата определения модуля 804 определения. Когда модуль 804 определения определяет то, что соединение колонн F не разрешается, соединение между колоннами F отменяется. Когда соединение между колоннами F разрешается, оптимальный способ соединения выбирается и решается из способов соединения, сохраненных в модуле 800 хранения, на основе состояния движения каждого транспортного средства С, т.е. принимаемой "информации по движению", "информации колонн" и "информации внешних факторов", сохраненной в модуле 800 хранения.
Модуль 805 принятия решений также принимает решение в отношении режима вождения впереди идущего транспортного средства Ct каждой колонны F на основе решенного способа соединения. Состояние колонны после соединения, способ соединения, заданный режим вождения и т.п. называются "режимом соединения".
[0120] Модуль 806 обработки инструкций передает информацию относительно режима соединения, решенного посредством модуля 805 принятия решений, во впереди идущее транспортное средство Ct каждой колонны F, с которой необходимо соединяться. Информация относительно режима соединения передается для того, чтобы инструктировать соединение между колоннами F.
Когда модуль 806 обработки инструкций инструктирует впереди идущему транспортному средству выполнять соединение, подтверждение безопасности внешнего фактора может выполняться из информации по движению, и время начала соединения, в которое начинается соединение, может передаваться. Впереди идущее транспортное средство Ct каждой колонны F начинает соединение на основе принимаемого способа соединения.
[0121] Модуль 807 управления соединениями управляет соединением между колоннами через связь с впереди идущим транспортным средством Ct каждой колонны F. Когда принимается решение отменять соединение во время соединения, впереди идущее транспортное средство Ct управляется таким образом, чтобы разрывать соединение.
Даже после того, как соединение начинается, устройство 80 администрирования колонн транспортных средств принимает информацию по движению из впереди идущего транспортного средства Ct колонны F, в которой начинается соединение, и модуль 804 определения определяет то, продолжается или нет соединение нормально, на основе информации по движению.
Например, когда транспортное средство, которое является нерелевантным для колонны F, вклинивается между колоннами, колонны не могут соединяться между собой, и в силу этого модуль 804 определения определяет необходимость отменять соединение.
Когда модуль 804 определения определяет необходимость отменять соединение, модуль 807 управления соединениями уведомляет впереди идущее транспортное средство Ct каждой колонны в отношении отмены соединения. После того, как соединение разрывается, каждая колонна F продолжает двигаться при поддержании исходной колонны. Когда не определяется необходимость отменять соединение, соединение между колоннами завершается.
[0122] Программа для администрирования колонн транспортных средств
Далее описывается пример процесса программы для администрирования колонн транспортных средств (способа администрирования колонн транспортных средств), выполняемой посредством устройства 80 администрирования колонн транспортных средств и впереди идущего транспортного средства Ct каждой колонны F в системе S администрирования колонн транспортных средств, со ссылкой на фиг. 12-17.
Программа согласно настоящему варианту осуществления представляет собой программу для реализации модуля 801 связи, модуля 802 администрирования, модуля 803 управления состояниями, модуля 804 определения, модуля 805 принятия решений, модуля 806 обработки инструкций и модуля 807 управления соединениями, описанных выше в качестве функциональных компонентов устройства 80 администрирования колонн транспортных средств, включающего в себя модуль 800 хранения, и CPU устройства 80 администрирования колонн транспортных средств выполняет программу для администрирования колонн транспортных средств (способ администрирования колонн транспортных средств).
[0123] Чтобы описывать процесс программы для администрирования колонн транспортных средств, как проиллюстрировано на фиг. 12, приводится пример в качестве более конкретной ситуации, в которой задняя колонна Fr (первая колонна), движущаяся позади передней колонны Ff (второй колонны), движущейся впереди на идентичной дороге, соединяется с передней колонной Ff.
[0124] Помимо этого, программа для администрирования колонн транспортных средств главным образом включает в себя "процесс определения соединения" для определения, разрешается или нет соединение между колоннами, и "процесс управления соединениями между колоннами" для управления соединением между колоннами, когда соединение разрешается.
[0125] В нижеприведенном описании, сначала описывается "процесс определения соединения" для определения, разрешается или нет соединение между колоннами, со ссылкой на схему последовательности операций, проиллюстрированную на фиг. 14, а после этого описывается "процесс управления соединениями между колоннами" для соединения колонн.
[0126] Когда впереди идущее транспортное средство задней колонны находится в режиме удаленного вождения
Чтобы описывать пример процесса программы для администрирования колонн транспортных средств, предполагается, что впереди идущее транспортное средство Ct2 передней колонны Ff находится в автоматизированном вождении (в режиме автономного вождения), и впереди идущее транспортное средство Ct1 задней колонны Fr управляется в режиме вождения за счет удаленной операции (в режиме удаленного вождения).
В "первом процессе связи (на первом этапе связи)", впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr передают и принимают информацию по движению, включающую в себя информацию текущей позиции между транспортными средствами С, и передают информацию по движению в устройство 80 администрирования колонн транспортных средств перед началом "процесса определения соединения".
Во "втором процессе связи (на втором этапе связи)", модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает информацию по движению, включающую в себя информацию текущей позиции и т.п., в реальном времени из каждого из транспортных средств С, составляющих переднюю колонну Ff и заднюю колонну Fr, перед началом "процесса определения соединения".
Дополнительно, каждое транспортное средство С выполняет управление движением (этап управления движением, процесс управления движением) транспортного средства на основе информации текущей позиции, указываемой на этапе указания позиции.
Информация по движению каждого транспортного средства С сохраняется в модуле 800 хранения, и модуль 802 администрирования администрирует "процесс администрирования (этап администрирования)" и администрирует то, что множество транспортных средств С находятся в состоянии движения, в котором множество транспортных средств С движутся при формировании передней колонны Ff или задней колонны Fr.
[0127] В "процессе определения соединения", проиллюстрированном на фиг. 14, во-первых, запрос на установление соединения передается из впереди идущего транспортного средства Ct1 задней колонны Fr в режиме удаленного вождения в устройство 80 администрирования колонн транспортных средств и впереди идущее транспортное средство Ct2 передней колонны Ff (этап S201). Запрос на установление соединения может передаваться вручную оператором, который осуществляет удаленное вождение впереди идущего транспортного средства Ct1 задней колонны Fr.
Запрос на установление соединения для соединения колонн может передаваться автоматически, когда условие активации соединения удовлетворяется, например, когда впереди идущее транспортное средство Ct1 движется по шоссе, либо когда впереди идущее транспортное средство Ct1 начинает движение по предварительно определенной дороге, обозначенной заранее. Запрос на установление соединения может передаваться автоматически при условии, что впереди идущее транспортное средство Ct1 распознает идентификационную метку 60 (QR-код (зарегистрированная торговая марка)) на едущем сзади транспортном средстве Cr колонны F, с которой необходимо соединяться.
[0128] Модуль 801 связи устройства 80 администрирования колонн транспортных средств и впереди идущее транспортное средство Ct2 передней колонны Ff принимают запрос на установление соединения. Устройство 80 администрирования колонн транспортных средств передает, во впереди идущее транспортное средство Ct2 передней колонны Ff, подтверждение соединения для подтверждения того, разрешается или нет соединение (этап S202).
[0129] Впереди идущее транспортное средство Ct2 передней колонны Ff принимает подтверждение соединения из устройства 80 администрирования колонн транспортных средств и передает ответ с разрешением/отклонением соединения, указывающий то, разрешается или нет соединение (этап S203).
В некоторых случаях, передняя колонна Ff отклоняет соединение с другой колонной при движении в колонне. Например, когда погруженный груз представляет собой ценный предмет, передняя колонна Ff может не хотеть соединяться с другой колонной. Когда соединение с другой колонной запрещается, впереди идущее транспортное средство Ct2 передней колонны Ff передает, в устройство 80 администрирования колонн транспортных средств, сигнал, указывающий то, что соединение не разрешается. Когда передняя колонна Ff может соединяться с другой колонной F, впереди идущее транспортное средство Ct2 передней колонны Ff передает, в устройство 80 администрирования колонн транспортных средств, сигнал, указывающий то, что соединение разрешается.
[0130] Модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает ответ с разрешением/отклонением соединения из впереди идущего транспортного средства Ct2 передней колонны Ff, и модуль 804 определения определяет то, следует или нет соединять переднюю колонну Ff и заднюю колонну Fr, на основе ответа с разрешением/отклонением соединения, состояний движения транспортных средств С, формирующих колонну, и т.п. (процесс определения разрешения на соединение (процесс определения, этап определения): этап S204). Процесс, соответствующий "процессу управления состояниями (этапу управления состояниями)" согласно настоящему изобретению, представляет собой "процесс определения разрешения на соединение (процесс определения, этап определения)", "процесс принятия решений (этап принятия решения)", "процесс обработки инструкций (этап обработки инструкций)" и "процесс управления соединениями между колоннами (процесс управления соединениями, этап управления соединениями)".
[0131] Процесс определения разрешения на соединение
Здесь, в дальнейшем подробно описывается "процесс определения разрешения на соединение", выполняемый на этапе S204, со ссылкой на фиг. 16. Модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает ответ с разрешением на соединение (ответ с подтверждением) из впереди идущего транспортного средства Ct2 передней колонны Ff, которая передает подтверждение соединения (этап S401).
Модуль 804 определения подтверждает принимаемый ответ с разрешением/отклонением соединения (этап S402). Когда ответ с разрешением/отклонением соединения указывает то, что соединение не разрешается (этап S402: "Нет"), соединение между колоннами не разрешается, и процесс завершается. В это время, тот факт, что соединение не разрешается, вместе с причиной, может передаваться во впереди идущее транспортное средство Ct1 задней колонны Fr.
[0132] Когда ответ с разрешением/отклонением соединения из передней колонны Ff указывает то, что соединение разрешается (этап S402: "Да"), модуль 804 определения определяет то, соответствует или нет информация внешних факторов "условию запрета соединений между колоннами", сохраненному в модуле 800 хранения (этап S403). Например, в случае если диспетчеризованный намеченный путь движения находится в заторе, либо идет снег или дождь, когда колонны соединяются между собой, это может быть довольно опасным, и в силу этого соединение между колоннами не разрешается, и процесс завершается (этап S403: "Да").
[0133] На этапе S403, когда информация внешних факторов не соответствует "условию запрета соединений между колоннами" (этап S403: "Нет"), модуль 804 определения определяет то, соответствуют или нет информация колонн передней колонны Ff и задней колонны Fr и информация касательно транспортного средства для транспортных средств С, составляющих колонну, "условию запрета соединений между колоннами".
Например, когда диспетчеризованные намеченные пути движения отличаются, поскольку информация колонн и информация касательно транспортного средства соответствуют тому, "когда диспетчеризованные намеченные пути движения колонн отличаются" условия (6) запрета соединений между колоннами, определяется то, что соединение не разрешается.
[0134] На этапе S404 "процесса определения разрешения на соединение", когда информация колонн или информация касательно транспортных средств соответствует, по меньшей мере, одному "условию запрета соединений между колоннами" (этап S404: "Да"), текущее состояние колонны поддерживается без соединения. В это время, как и в случае, когда соединение не разрешается на этапе S402, устройство 80 администрирования колонн транспортных средств может передавать, во впереди идущее транспортное средство Ct1 задней колонны Fr, в которую запрос на установление соединения передается, то, что соединение не разрешается, вместе с причиной.
[0135] Когда информация колонн или информация касательно транспортных средств не соответствует ни одному из "условий запрета соединений между колоннами" (этап S404: "Нет"), модуль 801 связи устройства 80 администрирования колонн транспортных средств передает "разрешение на соединение" во впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr (этап S405, этап S205 процесса определения соединения). После этого, устройство 80 администрирования колонн транспортных средств, впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr выполняют "процесс управления соединениями между колоннами" (этап S206).
[0136] В вышеописанном "процессе определения разрешения на соединение", определение того, соответствует или нет информация внешних факторов "условию запрета соединений между колоннами" (этап S403), выполняется перед определением на основе информации колонн или информации касательно транспортного средства (этап S404), и определение на основе информации колонн или информации касательно транспортного средства может выполняться перед определением на основе информации внешних факторов.
[0137] Процесс управления соединениями между колоннами
На этапе S204 процесса определения соединения, когда соединение между передней колонной Ff и задней колонной Fr разрешается, устройство 80 администрирования колонн транспортных средств, передняя колонна Ff и задняя колонна Fr переключаются на процесс управления соединениями между колоннами (этап управления соединениями) для фактического соединения колонн. В дальнейшем в этом документе описывается "процесс управления соединениями между колоннами" со ссылкой на фиг. 15.
[0138] Когда колонны соединяются между собой в "первом процессе связи", транспортные средства С, составляющие переднюю колонну Ff и заднюю колонну Fr, передают информацию по движению рассматриваемого транспортного средства, в частности, информацию текущей позиции в устройство 80 администрирования колонн транспортных средств в реальном времени и передают информацию по движению даже сразу после того, как "процесс управления соединениями между колоннами" начинается (этапы S301 и S302).
Когда соединение начинается, транспортные средства С, составляющие переднюю колонну Ff и заднюю колонну Fr, могут двигаться в режиме совместного управления. Режим совместного управления представляет собой режим, в котором транспортные средства С движутся совместно в качестве группы транспортных средств без отдельного отделения от колонны F. Другими словами, режим совместного управления представляет собой режим, в котором транспортным средствам С, движущимся позади впереди идущего транспортного средства Ct, запрещается свободный выезд из колонны F. Режим совместного управления выполняется до тех пор, пока соединение между колоннами не завершается, либо не определяется то, что соединение должно отменяться.
[0139] Модуль 801 связи устройства 80 администрирования колонн транспортных средств получает информацию по движению из передней колонны Ff и задней колонны Fr и сохраняет информацию по движению в модуле 800 хранения вместе с информацией колонн. Информация внешних факторов получается из внешнего сервера и сохраняется в модуле 800 хранения (этап S304).
[0140] Затем, модуль 805 принятия решений устройства 80 администрирования колонн транспортных средств принимает решение в отношении режима соединения для соединения колонн на основе полученной информации по движению (процесс принятия решений, процесс принятия решений). В частности, оптимальный способ соединения выбирается и задается из множества способов соединения, сохраненных в модуле 800 хранения, на основе информации по движению колонны (этап S305).
В способе соединения, определяются информация относительно скорости каждой колонны во время соединения, интервал между колоннами, интервал между транспортными средствами и т.п. В качестве примера способа соединения, предусмотрен способ, в котором "скорость передней колонны Ff уменьшается, а скорость задней колонны Fr увеличивается, с тем чтобы уменьшать интервал FD между колоннами (см. фиг. 12). После этого, когда интервал FD между передней колонной Ff и задней колонной Fr равен или меньше предварительно определенного интервала, как передняя колонна Ff, так и задняя колонна Fr движутся на идентичной скорости". Помимо этого, в качестве другого способа соединения, предусмотрен способ, в котором "скорость передней колонны уменьшается, а скорость задней колонны увеличивается, с тем чтобы уменьшать интервал между колоннами, и когда интервал FD между колоннами является более широким, чем транспортные средства С, составляющие колонну, транспортные средства С задней колонны ускоряются на единичную скорость в час относительно этого состояния и приближаются до тех пор, пока интервал FD между колоннами не совпадает с интервалом транспортного средства".
[0141] После того, как модуль 805 принятия решений выбирает и задает способ соединения на этапе S304, модуль 805 принятия решений задает режимы вождения впереди идущего транспортного средства Ct2 передней колонны Ff и впереди идущего транспортного средства Ct1 задней колонны Fr на основе заданного способа соединения (этап S306).
В это время, когда способ соединения, выбранный посредством модуля 805 принятия решений, представляет собой способ для автоматического управления как передней колонной Ff, так и задней колонной Fr, как впереди идущее транспортное средство Ct2 передней колонны Ff, так и впереди идущее транспортное средство Ct1 задней колонны Fr задаются в "режим автоматизированного вождения".
Когда выбранный способ соединения представляет собой способ для автоматического управления только задней колонной Fr, например, способ для увеличения только скорости задней колонны Fr, впереди идущее транспортное средство Ct1 задней колонны Fr задается в качестве "режима автоматизированного вождения", по меньшей мере.
Когда выбранный способ соединения представляет собой способ для автоматического управления только передней колонной Ff, например, когда только скорость передней колонны Ff уменьшается, впереди идущее транспортное средство Ct2 передней колонны Ff задается в качестве "режима автоматизированного вождения", по меньшей мере.
Посредством задания впереди идущего транспортного средства Ct колонны F с возможностью управляться в "режим автоматизированного вождения", колонны могут более безопасно соединяться между собой, чем тогда, когда впереди идущее транспортное средство Ct задается в качестве "режима удаленного вождения".
[0142] Затем, модуль 805 принятия решений выполняет подтверждение безопасности внешнего фактора перед соединением на основе полученной информации колонн и информации по движению (этап S307). В частности, подтверждается то, представляет или нет дорога собой место движения, в котором могут соединяться колонны, и то, является или нет погода подходящей. В это время, оператор, который осуществляет удаленное вождение впереди идущего транспортного средства Ct1 задней колонны Fr, может выполнять подтверждение безопасности посредством просмотра синтезированного видео колонны F, проиллюстрированной на фиг. 13, отображаемого на мониторе.
Модуль 805 принятия решений принимает решение в отношении того, может или нет соединение между колоннами начинаться, на этапе S308 при выполнении подтверждения безопасности. Когда условие начала соединения не удовлетворяется вследствие внешнего фактора (этап S308: "Нет"), процесс возвращается к этапу S307, и подтверждение безопасности внешнего фактора продолжается. На этапе S308, когда условие начала соединения удовлетворяется, способ соединения и время начала соединения, выбранные посредством модуля 805 принятия решений, передаются во впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr (этап S309: процесс обработки инструкций, процесс обработки инструкций).
[0143] После приема информации относительно способа соединения и времени начала соединения из устройства 80 администрирования колонн транспортных средств, впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr начинают соединение между колоннами согласно принимаемому способу соединения (этапы S310 и S311). В это время, когда режим вождения задается в способе соединения, режимы вождения впереди идущего транспортного средства Ct2 передней колонны Ff и впереди идущего транспортного средства Ct1 задней колонны Fr изменяются, соответственно.
Когда соединение с передней колонной Ff разрешается посредством устройства 80 администрирования колонн транспортных средств, и информация относительно способа соединения и времени начала соединения принимается, впереди идущее транспортное средство Ct1 задней колонны Fr может подтверждать то, что передняя колонна Ff представляет собой цель, с которой необходимо соединяться, посредством распознавания идентификационной метки 60 (например, QR-кода (зарегистрированная торговая марка), см. фиг. 1), смонтированной на едущем сзади транспортном средстве Cr передней колонны Ff.
[0144] После того, как соединение начинается, каждое из транспортных средств С, составляющих переднюю колонну Ff и заднюю колонну Fr, передает информацию по движению в устройство 80 администрирования колонн транспортных средств (этапы S312 и S313). Устройство 80 администрирования колонн транспортных средств анализирует информацию по движению, когда передняя колонна Ff и задняя колонна Fr соединяются между собой, и определяет то, следует или нет отменять (разрывать) соединение между колоннами (этап S314). В дальнейшем описывается "процесс определения отмены соединения" во время соединения со ссылкой на блок-схему последовательности операций способа по фиг. 17.
[0145] Модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает информацию по движению из каждого из транспортных средств С, составляющих переднюю колонну Ff и заднюю колонну Fr (этап S501). Модуль 804 определения анализирует информацию колонн и информацию по движению (этап S502). Затем, модуль 804 определения определяет то, удовлетворяется или нет условие отмены соединения. Когда условие отмены соединения удовлетворяется (этап S503: "Да"), впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr уведомляются в отношении отмены соединения (разрыва соединения) (этап S504).
[0146] "Условие отмены соединения" (предварительно определенное условие соединения) является идентичным "запрету соединений между колоннами", используемому при определении того, разрешается или нет соединение между колоннами, и, например, когда возникает изменение погоды во время соединения между колоннами, и идет снег или дождь, соединение между колоннами отменяется.
Например, когда определяется то, что диспетчеризованный намеченный путь движения, общий для колонн является достаточно длинным и составляет предварительно определенное расстояние или более, на основе информации диспетчеризованного намеченного пути движения каждой колонны в момент времени, когда соединение начинается, но требуется время на то, чтобы соединять колонны, и расстояние (расстояние движения в колонне) общего диспетчеризованного намеченного пути движения после соединения не составляет предварительно определенное расстояние или больше, условие отмены соединения удовлетворяется, и в силу этого соединение между передней колонной Ff и задней колонной Fr отменяется.
[0147] Когда условие отмены соединения не удовлетворяется (этап S503: "Нет"), устройство 80 администрирования колонн транспортных средств подтверждает то, принимается или нет уведомление в отношении завершения соединения из впереди идущего транспортного средства Ct2 передней колонны Ff и впереди идущего транспортного средства Ct1 задней колонны Fr. Когда уведомление в отношении завершения соединения не принимается, поскольку соединение проводится, процесс возвращается к этапу S501, и "процесс определения отмены соединения" непрерывно выполняется.
Модуль 804 определения многократно выполняет "процесс определения отмены соединения", до тех пор, пока уведомление в отношении завершения соединения не принимается из впереди идущих транспортных средств Ct1 и Ct2.
[0148] Возвращаясь к фиг. 15. Когда модуль 804 определения устройства 80 администрирования колонн транспортных средств определяет необходимость отменять соединение между колоннами на этапе S314 "процесса управления соединениями между колоннами", модуль 801 связи передает уведомление в отношении отмены соединения во впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr (этап S315).
Впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr нормально отслеживают то, принимается или нет уведомление в отношении отмены соединения из устройства 80 администрирования колонн транспортных средств во время соединения (этапы S316 и S317), и когда уведомление в отношении отмены соединения не принимается (этапы S316 и S317: "Нет"), операция соединения между колоннами продолжается, и соединение завершается (этапы S318 и S320).
Когда уведомление в отношении отмены соединения принимается (этапы S316 и S317: "Да"), операция соединения между колоннами отменяется (этапы S319 и S321).
"Процесс управления соединениями между колоннами" завершается, когда соединение между передней колонной Ff и задней колонной Fr завершается, либо когда определяется то, что соединение должно отменяться.
[0149] Процесс возвращается в "процесс определения соединения" на фиг. 14. После того, как "процесс управления соединениями между колоннами" заканчивается, впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr подтверждают то, завершается или нет соединение (этапы S207 и S208). Когда соединение между передней колонной Ff и задней колонной Fr завершается (этапы S207 и S208: "Да"), впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr передают уведомление в отношении завершения соединения в устройство 80 администрирования колонн транспортных средств (этапы S209 и S210).
[0150] После того, как модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает уведомление в отношении завершения соединения из впереди идущего транспортного средства Ct2 передней колонны Ff и впереди идущего транспортного средства Ct1 задней колонны Fr, модуль 802 администрирования принимает информацию по движению из транспортных средств С, составляющих новую колонну Fn после соединения. Модуль 802 администрирования формирует информацию колонн из информации по движению каждого из транспортных средств С, составляющих новую колонну Fn, и сохраняет (записывает) информацию колонн в модуле 800 хранения (этап S213). После этого, модуль 802 администрирования администрирует новую колонну Fn после соединения.
Уведомление в отношении завершения соединения может передаваться либо из впереди идущего транспортного средства Ct2 передней колонны Ff, либо из впереди идущего транспортного средства Ct1 задней колонны Fr.
[0151] В "процессе управления соединениями между колоннами", когда соединение между передней колонной Ff и задней колонной Fr отменяется (разрывается), и соединение между передней колонной Ff и задней колонной Fr не завершается (этапы S207 и S208: "Нет"), впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr передают отмену соединения и причину для этого в устройство 80 администрирования колонн транспортных средств (этапы S211 и S212). В это время, впереди идущее транспортное средство Ct2 передней колонны Ff и впереди идущее транспортное средство Ct1 задней колонны Fr также передают уведомление в отношении того, что передняя колонна Ff и задняя колонна Fr продолжают двигаться независимо.
Модуль 801 связи устройства 80 администрирования колонн транспортных средств принимает отмену соединения и причину для этого и сохраняет информацию в модуле 800 хранения. Модуль 802 администрирования администрирует переднюю колонну Ff и заднюю колонну Fr в качестве колонн, которые движутся независимо.
[0152] Когда впереди идущее транспортное средство передней колонны находится в режиме удаленного вождения
В примере процесса определения соединения, проиллюстрированного на фиг. 14, впереди идущее транспортное средство Ct2 передней колонны Ff находится в "режиме автоматизированного вождения", и впереди идущее транспортное средство Ct1 задней колонны Fr находится в "режиме удаленного вождения". Это представляет собой пример, и впереди идущее транспортное средство Ct2 передней колонны Ff может управляться в "режиме удаленного вождения", а впереди идущее транспортное средство Ct1 задней колонны Fr может управляться в "режиме автоматизированного вождения".
В этом случае, когда "процесс определения соединения", проиллюстрированный на фиг. 14, начинается, устройство 80 администрирования колонн транспортных средств сначала вычисляет расстояние FD между колоннами из информации по движению передней колонны Ff и задней колонны Fr. Когда определяется то, что расстояние FD между колоннами меньше предварительно определенного расстояния, устройство 80 администрирования колонн транспортных средств передает подтверждение соединения во впереди идущее транспортное средство Ct2 передней колонны Ff.
Когда условие активации соединения удовлетворяется, например, когда впереди идущее транспортное средство Ct1 задней колонны Fr движется по шоссе, либо когда впереди идущее транспортное средство Ct1 начинает движение по предварительно определенной дороге, обозначенной заранее, впереди идущее транспортное средство Ct1 может автоматически передавать запрос на установление соединения в устройство 80 администрирования колонн транспортных средств, и устройство 80 администрирования колонн транспортных средств может начинать "процесс определения соединения". Запрос на установление соединения может передаваться автоматически при условии, что впереди идущее транспортное средство Ct1 задней колонны Fr в режиме автоматизированного вождения распознает идентификационную метку 60, смонтированную на едущем сзади транспортном средстве Cr передней колонны Ff.
Когда оператор, который осуществляет удаленное вождение впереди идущего транспортного средства Ct2 передней колонны Ff, принимает подтверждение соединения, оператор, например, вручную передает ответ с разрешением/отклонением соединения в устройство 80 администрирования колонн транспортных средств. Когда разрешение/отклонение соединения регистрируется заранее во впереди идущем транспортном средстве Ct2, ответ с разрешением/отклонением соединения может передаваться автоматически в устройство 80 администрирования колонн транспортных средств.
[0153] Когда соединение разрешается, устройство 80 администрирования колонн транспортных средств, которое принимает ответ с разрешением/отклонением соединения из впереди идущего транспортного средства Ct2 передней колонны Ff, выполняет "процесс определения разрешения на соединение" этапа S204 и определяет то, разрешается или нет соединение, на основе информации внешних факторов, информации по движению и т.п.
После этого, аналогично случаю, в котором впереди идущее транспортное средство Ct1 задней колонны Fr находится в режиме удаленного вождения, процесс передачи разрешения на соединение (этап S205), процесс "управления соединениями между колоннами" и т.п. выполняются, и соединение между передней колонной Ff и задней колонной Fr выполняется.
[0154] Когда впереди идущее транспортное средство каждой колонны находится в режиме автоматизированного вождения
Оба впереди идущих транспортных средства Ct1 и Ct2 передней колонны Ff и задней колонны Fr могут управляться в режиме автоматизированного вождения.
В этом случае, когда "процесс определения соединения", проиллюстрированный на фиг. 14, начинается, устройство 80 администрирования колонн транспортных средств вычисляет расстояние FD между колоннами из информации по движению передней колонны Ff и задней колонны Fr, и когда определяется то, что расстояние FD между колоннами меньше предварительно определенного расстояния (колонны находятся близко друг к другу), передача подтверждения соединения осуществляется во впереди идущие транспортные средства Ct2 и Ct1 обеих колонн Ff и Fr.
[0155] Когда условие активации соединения удовлетворяется, например, когда впереди идущее транспортное средство Ct2 передней колонны Ff или впереди идущее транспортное средство Ct1 задней колонны Fr движется по шоссе, либо когда впереди идущее транспортное средство Ct2 передней колонны Ff или впереди идущее транспортное средство Ct1 задней колонны Fr начинает движение по предварительно определенной дороге, обозначенной заранее, одно из впереди идущих транспортных средств Ct2 и Ct1 может автоматически передавать запрос на установление соединения в устройство 80 администрирования колонн транспортных средств, и устройство 80 администрирования колонн транспортных средств может начинать "процесс определения соединения". Запрос на установление соединения может передаваться автоматически при условии, что впереди идущее транспортное средство Ct1 задней колонны Fr в режиме автоматизированного вождения распознает идентификационную метку 60, смонтированную на едущем сзади транспортном средстве Cr передней колонны Ff.
Впереди идущие транспортные средства Ct1 и Ct2, которые принимают подтверждение соединения, передают ответ с разрешением/отклонением соединения в устройство 80 администрирования колонн транспортных средств, и после этого, устройство 80 администрирования колонн транспортных средств определяет то, разрешается или нет соединение, на основе ответа с разрешением/отклонением соединения, принимаемого из обоих впереди идущих транспортных средств Ct1 и Ct2 (этап S204 процесса определения соединения).
После этого, аналогично случаю, в котором впереди идущее транспортное средство Ct1 задней колонны Fr находится в режиме удаленного вождения, процесс передачи разрешения на соединение (этап S205), процесс "управления соединениями между колоннами" и т.п. выполняются, и соединение между передней колонной Ff и задней колонной Fr выполняется.
[0156] Как описано выше, в случае если запрос на установление соединения и т.п. передается, когда условие, такое как тот факт, что транспортное средство движется по шоссе, или тот факт, что транспортное средство начинает движение по предварительно определенной дороге, обозначенной заранее, удовлетворяется, транспортное средство может обнаруживать то, удовлетворяется или нет удовлетворяемое условие, с постоянным интервалом, и когда удовлетворяемое условие не удовлетворяется, едущее сзади транспортное средство (или едущая сзади колонна) может прекращать движение при соединении и выезжать или отделяться.
Аналогично, когда информация по движению передается при условии, что идентификационная метка транспортного средства С распознается, транспортное средство может выполнять процесс распознавания идентификационной метки с постоянным интервалом, и когда идентификационная метка не распознается, едущее сзади транспортное средство (или едущая сзади колонна) может прекращать движение при соединении и выезжать или отделяться.
[0157] В вышеприведенном варианте осуществления, программа для администрирования колонн транспортных средств сохраняется на носителе записи, считываемом посредством устройства 1 управления движением транспортного средства (первого компьютера) и устройства 80 администрирования колонн транспортных средств (второго компьютера), и процесс выполняется посредством устройства 1 управления движением транспортного средства и устройства 80 администрирования колонн транспортных средств, считывающих и выполняющих программу. Здесь, носитель записи, считываемый посредством устройства 1 управления движением транспортного средства и устройства 80 администрирования колонн транспортных средств, представляет собой магнитный диск, магнитооптический диск, CD-ROM, DVD-ROM, полупроводниковое запоминающее устройство и т.п.
Альтернативно, выделенное программное обеспечение может активироваться с использованием терминала (мобильного терминала), служащего в качестве устройства 1 управления движением транспортного средства и устройства 80 администрирования колонн транспортных средств, и программа для администрирования колонн транспортных средств может выполняться в веб-браузере.
[0158] В вышеприведенном варианте осуществления, главным образом описываются устройство администрирования колонн транспортных средств, способ администрирования колонн транспортных средств, система администрирования колонн транспортных средств и программа для администрирования колонн транспортных средств согласно настоящему изобретению.
Согласно устройству администрирования колонн транспортных средств, способу администрирования колонн транспортных средств, системе администрирования колонн транспортных средств и программе для администрирования колонн транспортных средств, описанным выше, можно плавно выполнять соединение между колоннами посредством передачи режимов соединения колонн во впереди идущие транспортные средства и инструктирования соединения между колоннами, когда колонны соединяются.
Иными словами, устройство 80 администрирования колонн транспортных средств предоставляет, только во впереди идущее транспортное средство группы колонн, информацию, необходимую для определения, разрешается или нет соединение между колоннами F, передачи разрешения на соединение, администрирования состояния соединения и соединения, и поскольку транспортные средства, следующие за впереди идущим транспортным средством, управляются в определенном режиме вождения за счет системы управления движением транспортного средства, и в силу этого устройство 80 администрирования колонн транспортных средств непосредственно не администрирует всю группу транспортных средств в колонне F. Следовательно, процесс, выполняемый посредством устройства 80 администрирования колонн транспортных средств, становится простым, и в силу этого можно плавно выполнять соединение между колоннами.
Помимо этого, поскольку число впереди идущих транспортных средств уменьшается посредством соединения колонн, можно уменьшать число транспортных средств, управляемых посредством удаленного вождения или автоматизированного вождения, и можно уменьшать тариф на услуги связи для удаленного вождения или автоматизированного вождения. Посредством соединения колонн, можно информировать окружающие транспортные средства, составляющие колонны, в отношении того, что транспортные средства представляют собой транспортные средства в режиме автоматизированного вождения средства или транспортные средства в режиме удаленного вождения к идентичному пункту назначения, и риск вклинивания других транспортных средств между транспортными средствами и риск агрессивного поведения на дороге может уменьшаться.
Вышеуказанный вариант осуществления представляет собой просто пример для упрощения понимания настоящего изобретения и не ограничивает настоящее изобретение. Разумеется, что настоящее изобретение может изменяться или модифицироваться без отступления от объема настоящего изобретения и включает в себя эквиваленты означенного.
[0159] Ниже подробно описывается вышеуказанный вариант осуществления.
Приложение 1
Устройство администрирования колонн транспортных средств согласно настоящему изобретению представляет собой устройство администрирования колонн транспортных средств, выполненное с возможностью администрировать транспортное средство, причем устройство администрирования колонн транспортных средств включает в себя: второй модуль связи, выполненный с возможностью выполнять связь с первым модулем связи в транспортном средстве, причем транспортное средство включает в себя модуль вычисления абсолютной позиции, выполненный с возможностью получать GNSS-информацию, требуемую для автономного позиционирования, через приемное GNSS-устройство, смонтированное на рассматриваемом транспортном средстве, и вычислять абсолютную позицию транспортного средства с использованием GNSS-информации, модуль вычисления относительной позиции, выполненный с возможностью, в ответ на прием информации GNSS-коррекции, требуемой для относительного позиционирования, из внешней опорной станции, корректировать абсолютную позицию посредством относительного позиционирования с использованием информации GNSS-коррекции и вычислять относительную позицию транспортного средства в опорной станции, модуль указания позиции, выполненный с возможностью указывать текущую позицию транспортного средства с использованием относительной позиции, модуль управления движением, выполненный с возможностью управлять движением транспортного средства на основе информации текущей позиции, указываемой посредством модуля указания позиции, и первый модуль связи, выполненный с возможностью передавать и принимать информацию текущей позиции транспортного средства; модуль администрирования, выполненный с возможностью администрировать состояние движения каждого транспортного средства, подвергнутого управлению движением посредством модуля управления движением на основе информации позиции транспортного средства, полученной посредством второго модуля связи через связь с каждым транспортным средством; и модуль управления состояниями, выполненный с возможностью управлять состоянием движения транспортного средства, администрируемого посредством модуля администрирования, при этом: модуль администрирования администрирует каждое транспортное средство таким образом, что оно находится в состоянии движения, в котором множество транспортных средств формируют группу колонн при движении на основе информации позиции, принимаемой из другого транспортного средства, отличающегося от транспортного средства; и модуль управления состояниями включает в себя: модуль определения, выполненный с возможностью определять, когда модуль администрирования администрирует состояние движения, в котором транспортные средства движутся при формировании группы колонн, то, разрешается или нет соединение между колоннами, на основе состояния движения транспортного средства; модуль принятия решений, выполненный с возможностью принимать решение в отношении режима соединения между колоннами на основе результата определения, полученного посредством модуля определения; модуль обработки инструкций, выполненный с возможностью инструктировать соединение между колоннами посредством передачи информации относительно режима соединения, решенного посредством модуля принятия решений, во впереди идущее транспортное средство каждой колонны; и модуль управления соединениями, выполненный с возможностью управлять соединением между колоннами через связь с впереди идущим транспортным средством, инструктированным посредством модуля обработки инструкций.
Приложение 2
В устройстве администрирования колонн транспортных средств согласно приложению 1, второй модуль связи выполнен с возможностью принимать запрос на установление соединения из впереди идущего транспортного средства, формирующего первую колонну, причем запрос на установление соединения запрашивает соединение со второй колонной, служащей в качестве цели, с которой следует соединяться, модуль определения выполнен с возможностью определять, является или нет соединение со второй колонной возможным, на основе состояния движения впереди идущего транспортного средства второй колонны, администрируемой посредством модуля администрирования, и модуль принятия решений выполнен с возможностью запрашивать впереди идущее транспортное средство второй колонны на предмет того, чтобы соединяться с первой колонной, в ответ на определение, посредством модуля определения, того, что соединение со второй колонной является возможным, и в ответ на прием ответа с разрешением из второй колонны, принимать решение в отношении режима соединения между первой колонной и второй колонной на основе информации колонн для второй колонны, включенной в ответ с разрешением.
Приложение 3
В устройстве администрирования колонн транспортных средств согласно приложению 2, предварительно определенное условие соединения заключается в том, что на основе информации диспетчеризованного намеченного пути движения каждой колонны, колонны соединяются и движутся в случае, в котором расстояние движения в колонне после соединения колонн составляет предварительно определенное расстояние, и соединение между колоннами прекращается в случае, в котором расстояние движения в колонне не составляет предварительно определенное расстояние.
Приложение 4
В устройстве администрирования колонн транспортных средств согласно приложению 1, второй модуль связи выполнен с возможностью принимать изображения рассматриваемого транспортного средства, захваченные посредством устройства захвата изображений транспортного средства, модуль администрирования выполнен с возможностью администрировать изображение колонны в качестве состояния движения колонны, причем изображение колонны получается посредством синтезирования, из числа изображений, принимаемых из транспортных средств, изображений впереди идущего транспортного средства и едущего самым последним транспортного средства каждой колонны, и модуль определения выполнен с возможностью определять, разрешается или нет соединение между колоннами, на основе изображения колонны.
Список номеров ссылок
[0160] S: система администрирования колонн транспортных средств
S1: система управления движением транспортного средства С: транспортное средство
V: рассматриваемое транспортное средство
V1: электроусилитель рулевого колеса
V1a: рулевое колесо
V2: электрический дроссель
V2a: педаль акселератора
V3: электромагнитное тормозное устройство
V3a: педаль тормоза
FV: целевое транспортное средство
1: устройство управления движением транспортного средства 10: бортовой датчик
11: устройство захвата изображений
11a-11i: первое устройство захвата изображений - девятое устройство захвата изображений
12: радар (радар миллиметрового диапазона)
12a-12d: первый радар - четвертый радар
13: лидар
13а-13е: первый лидар - пятый лидар 20: бортовой локатор
21: приемное GNSS-устройство (приемное RTK-GNSS-устройство)
22: модуль инерциальных измерений (IMU)
30: бортовой ECU
31: интегрированный ECU
32: ECU рулевого колеса
33: ECU акселератора
34: ECU тормоза
40: устройство бортовой связи
50: устройство передачи информации касательно транспортного средства
51: бортовой локатор
51а: приемное GNSS-устройство
51b: модуль инерциальных измерений
52: устройство бортовой связи
60: идентификационная метка
60а-601: первая идентификационная метка - двенадцатая идентификационная метка
70: устройство удаленного управления 71: монитор
72: навигационный монитор
73: рулевое колесо
74: педаль акселератора
75: педаль тормоза
76: рабочий переключатель
80: устройство администрирования колонн транспортных средств
81: устройство связи 100: модуль хранения
101: модуль получения информации окружения 102: модуль получения информации позиции 102а: модуль вычисления абсолютной позиции 102b: модуль вычисления относительной позиции 102 с: модуль вычисления позиции коррекции 102d: модуль определения приема
103: модуль управления вождением (модуль управления движением)
104: модуль обнаружения транспортных средств
105: модуль связи
106: модуль смены режима
107: модуль получения скорости движения 108: модуль видеообработки 500: модуль хранения
501: модуль получения информации позиции
502: модуль связи
700: модуль хранения
701: модуль связи
702: модуль отображения на экране
703: модуль формирования рабочих данных
704: модуль выдачи уведомлений в отношении пользователя
800: модуль хранения
801: модуль связи (второй модуль связи)
802: модуль администрирования (модуль администрирования)
803: модуль управления состояниями
804: модуль определения
805: модуль принятия решений
806: модуль обработки инструкций
807: модуль управления соединениями
SA: искусственный спутник
ST: опорная станция
F: колонна
Ff: передняя колонна (вторая колонна) Fr: задняя колонна (первая колонна)
Ct, Ct1, Ct2: впереди идущее транспортное средство Cr: едущее сзади транспортное средство Се: едущее самым последним транспортное средство Р: синтезированное изображение
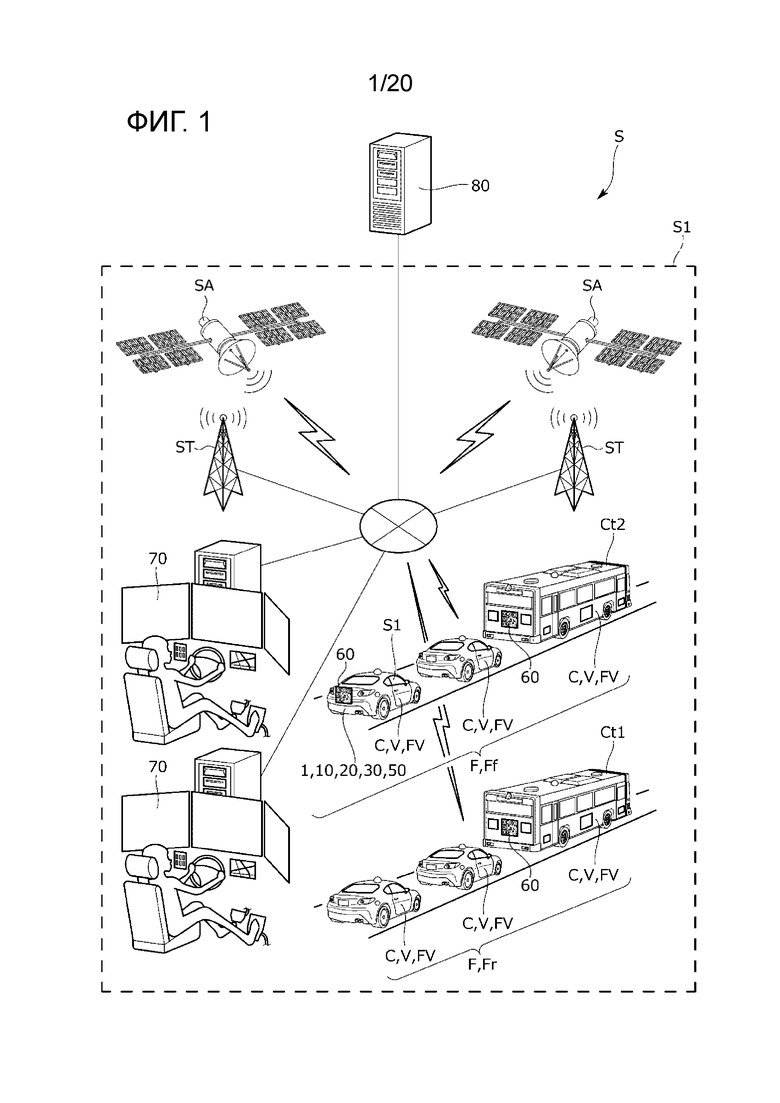
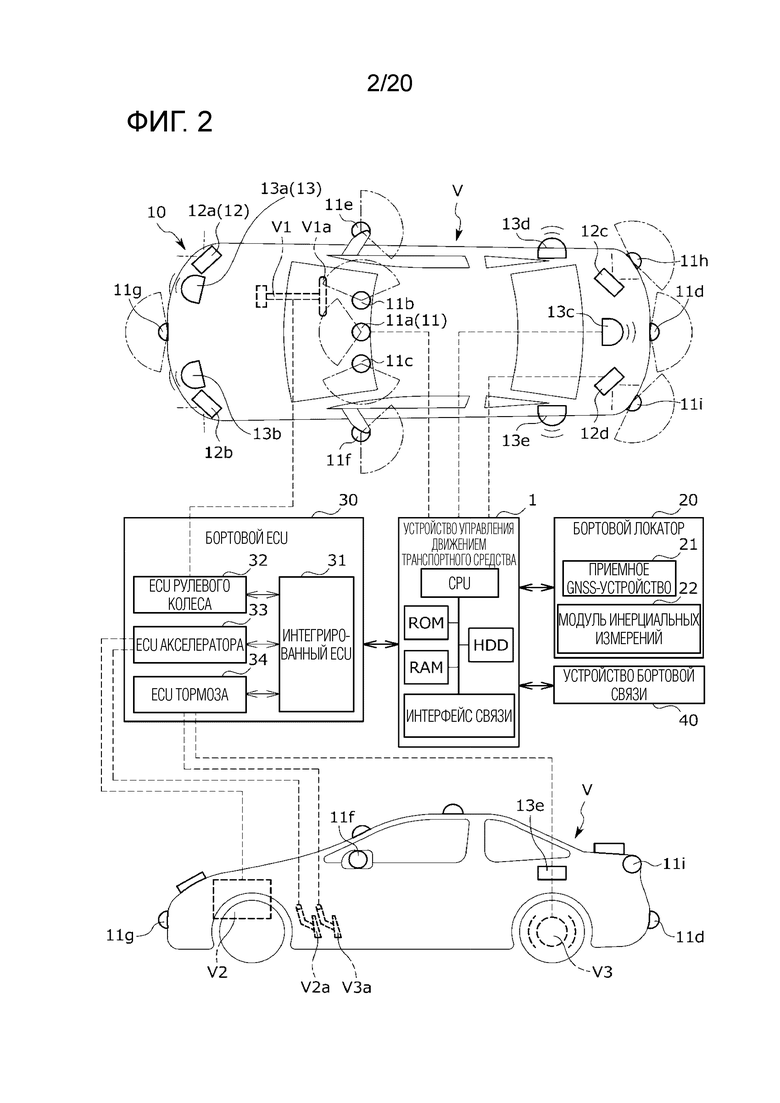
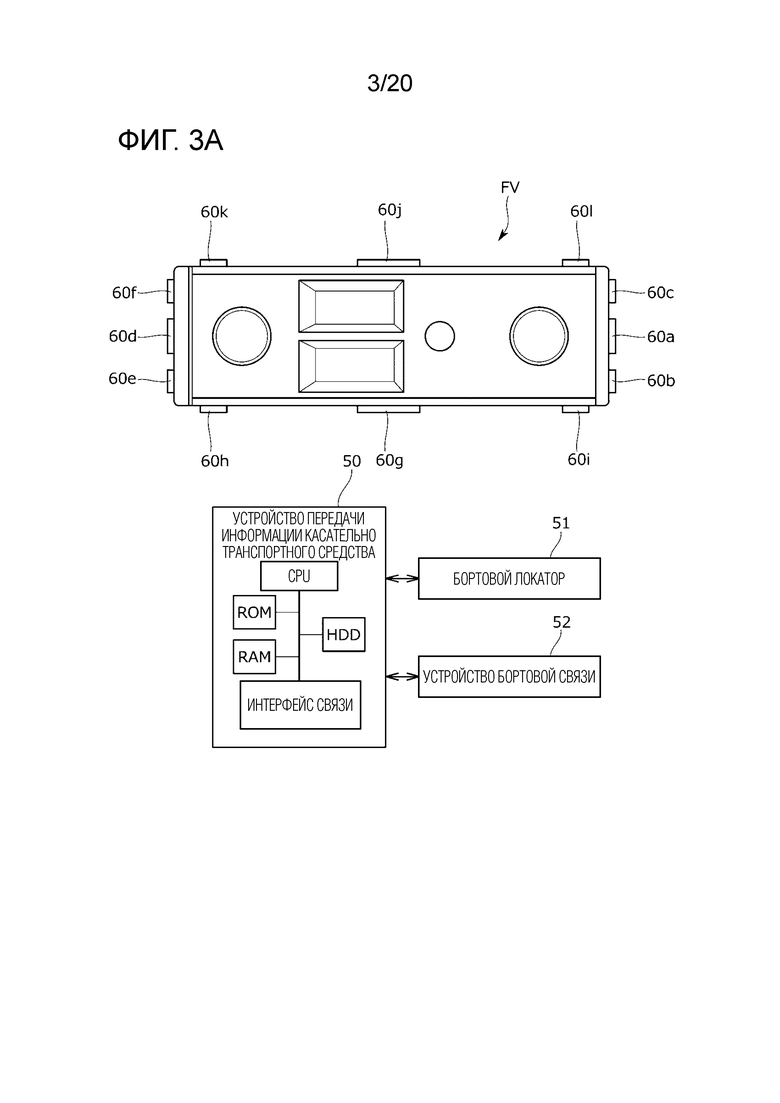
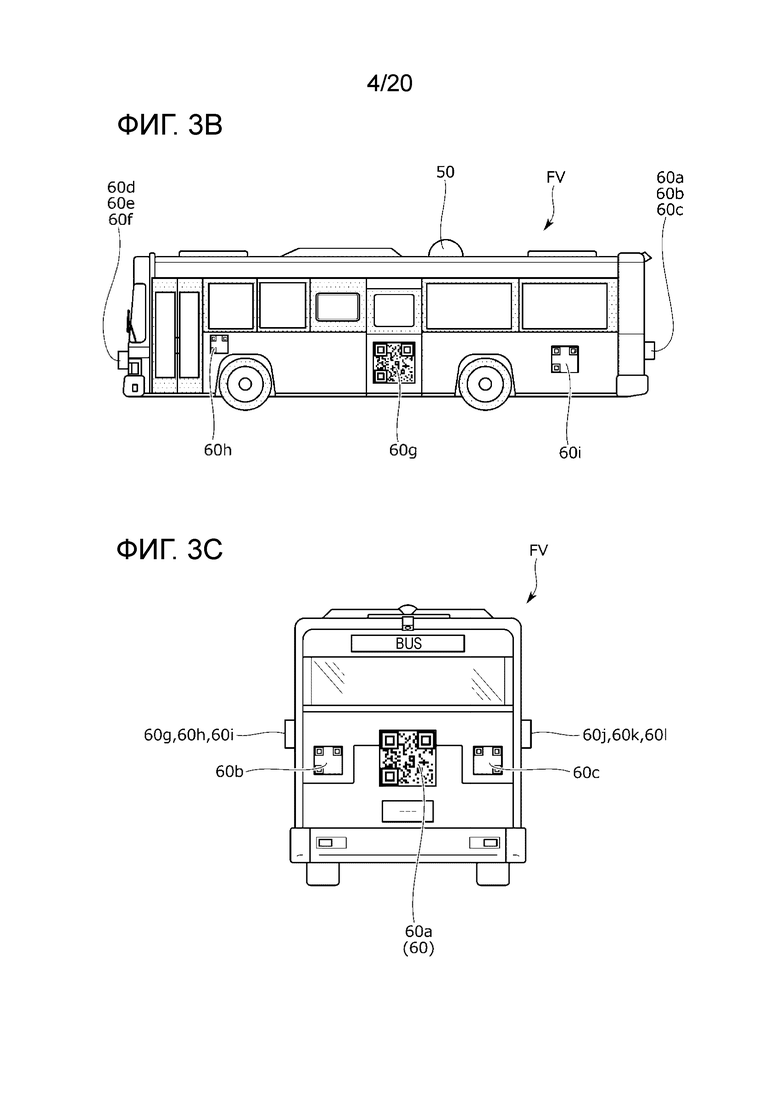
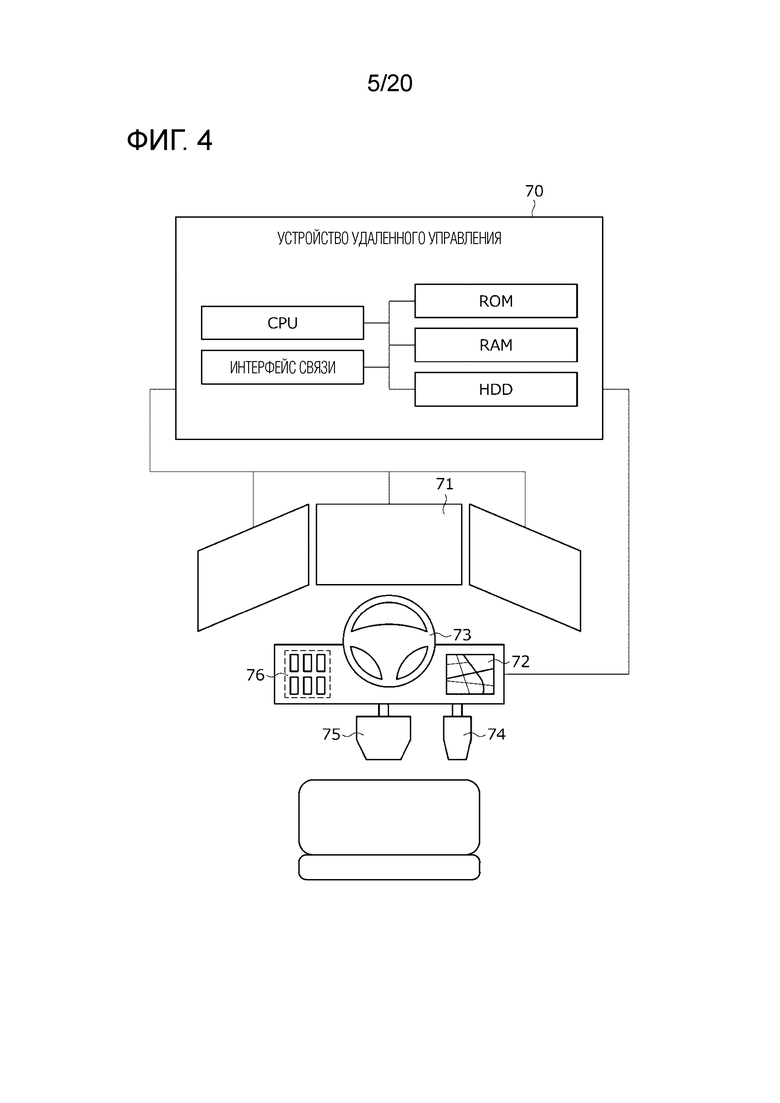
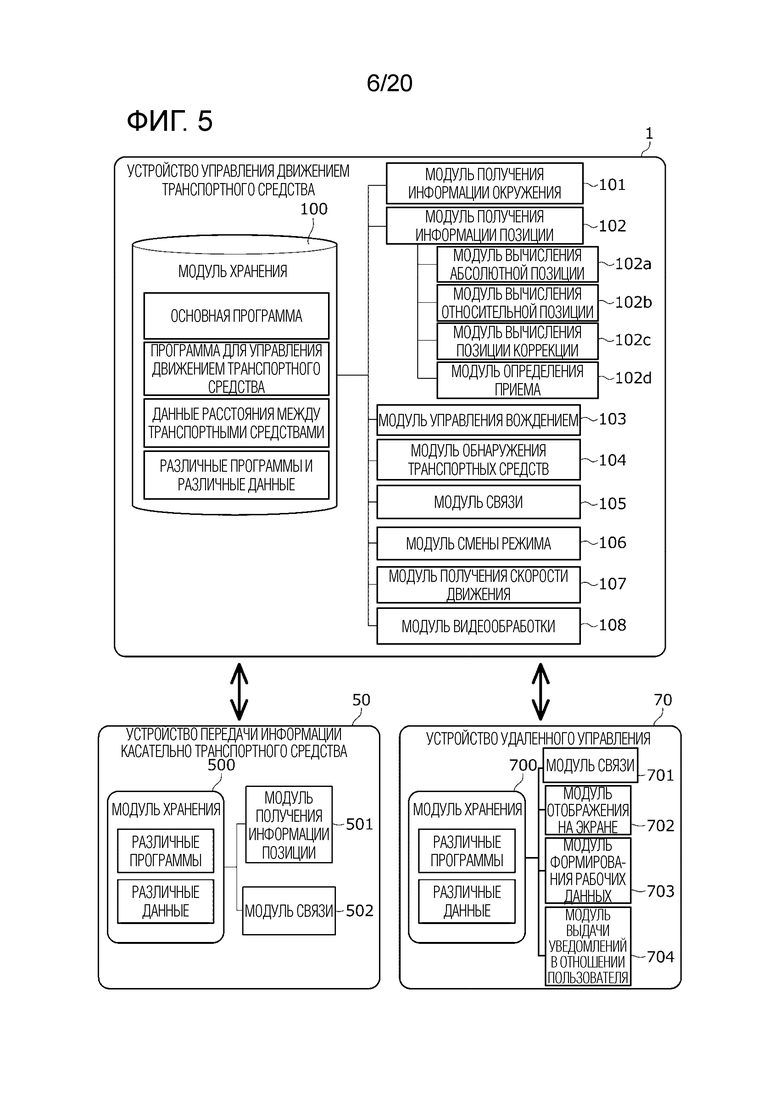
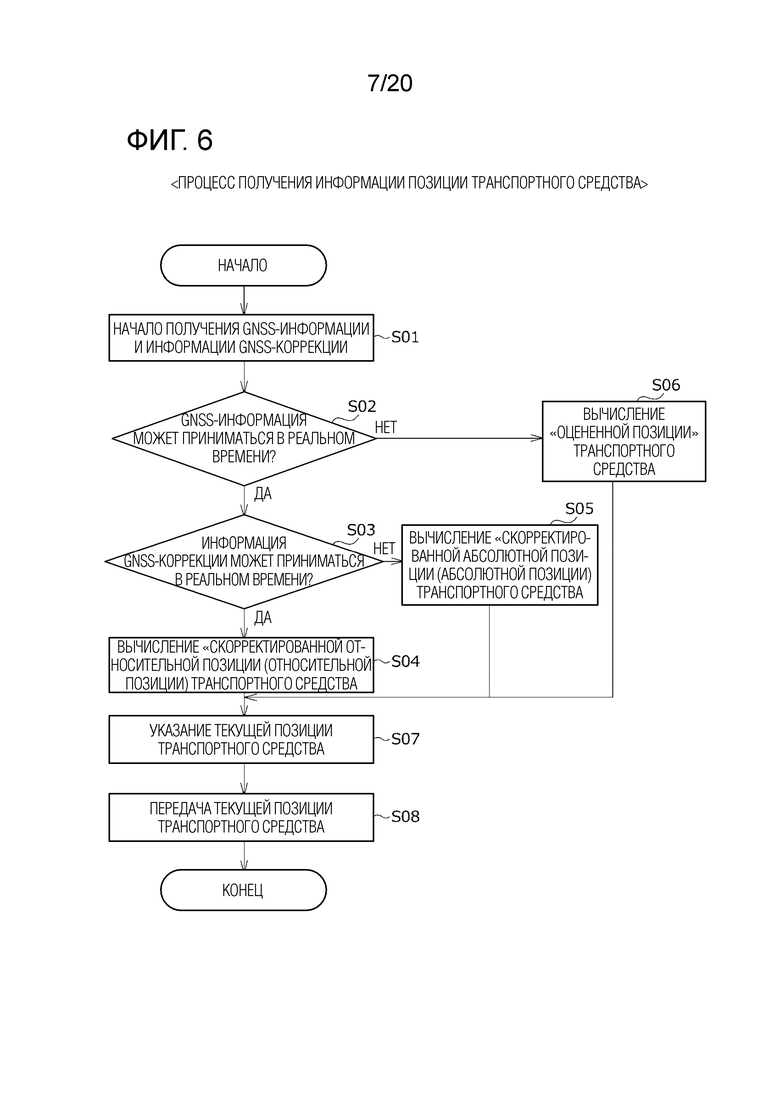
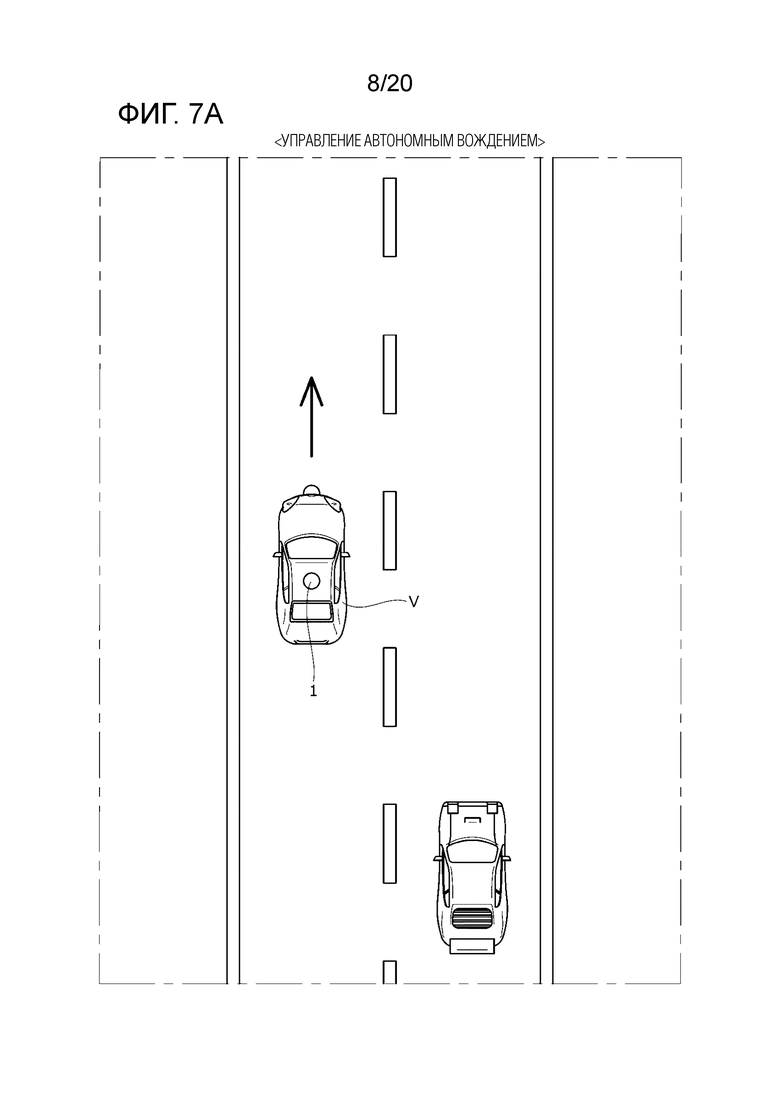
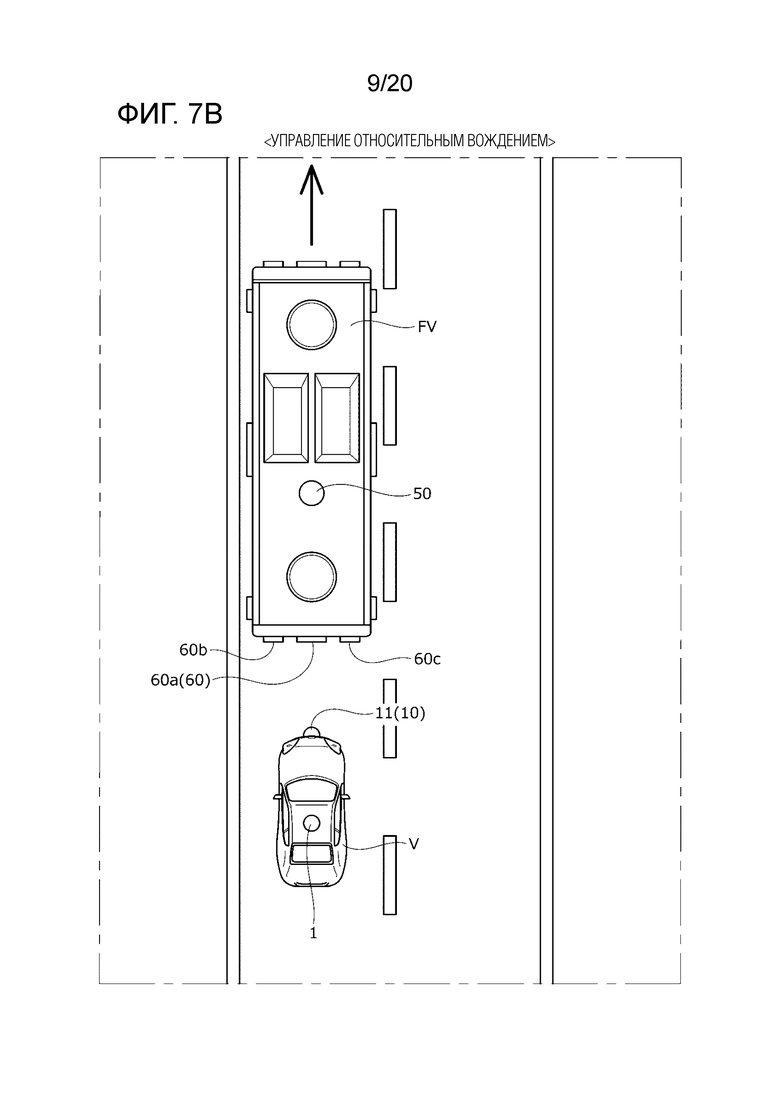
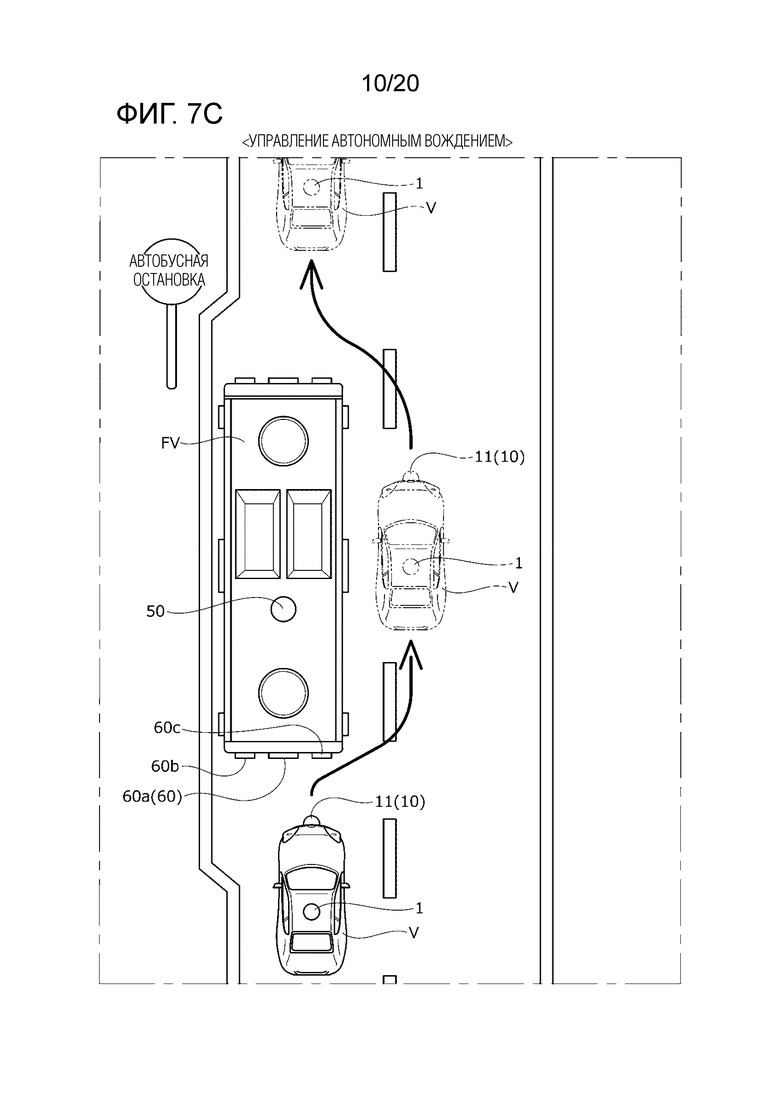
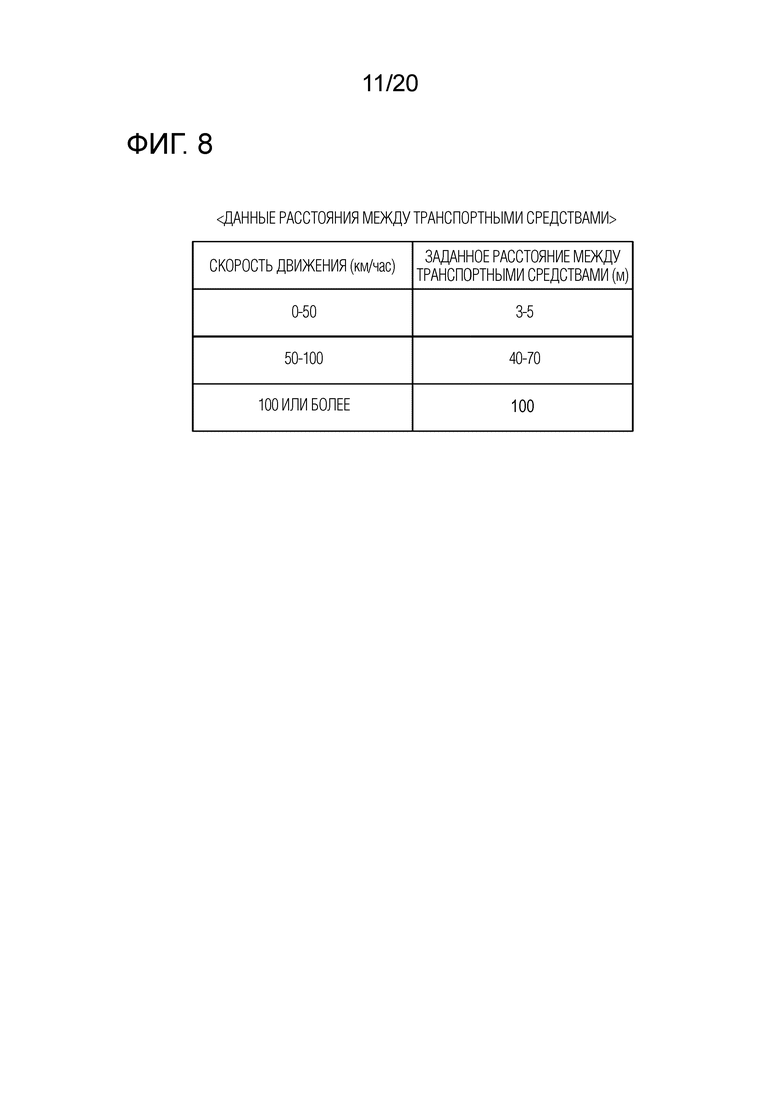
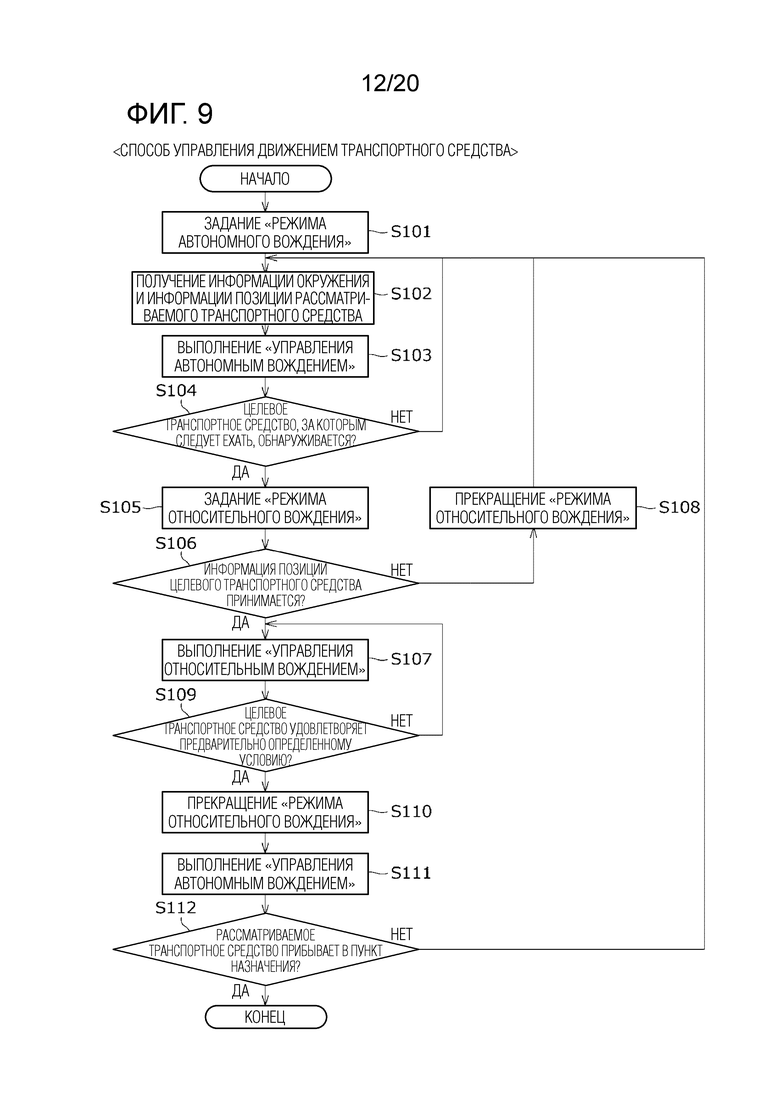
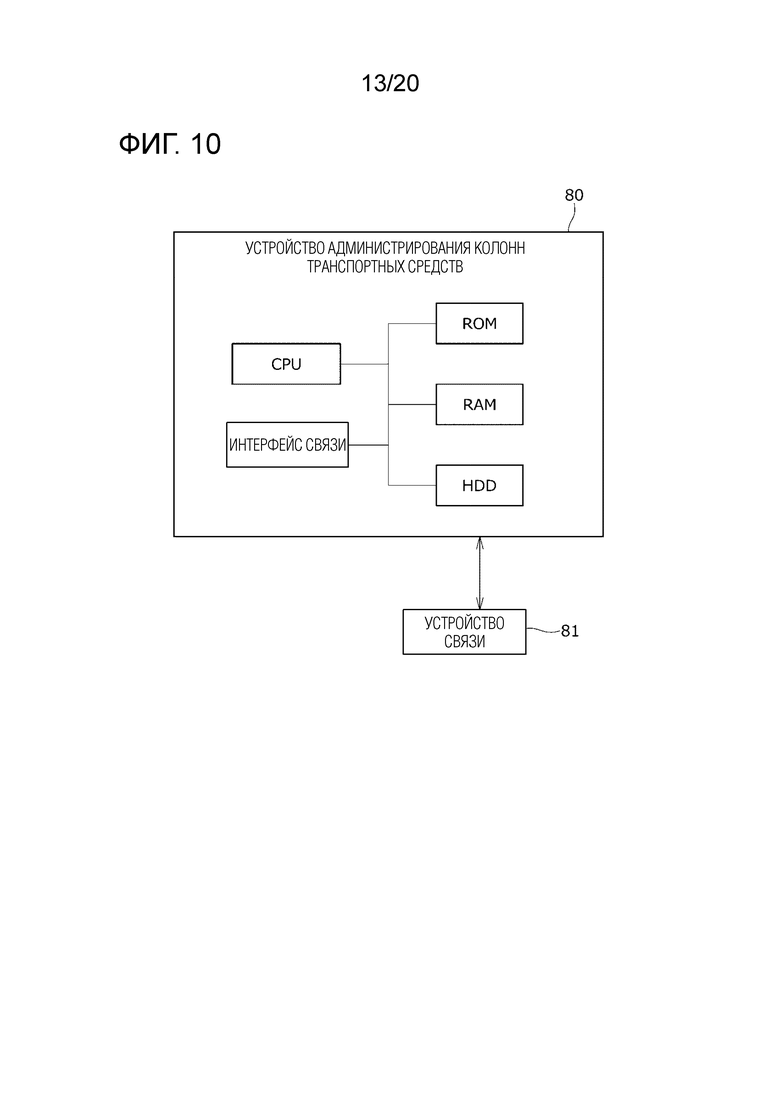
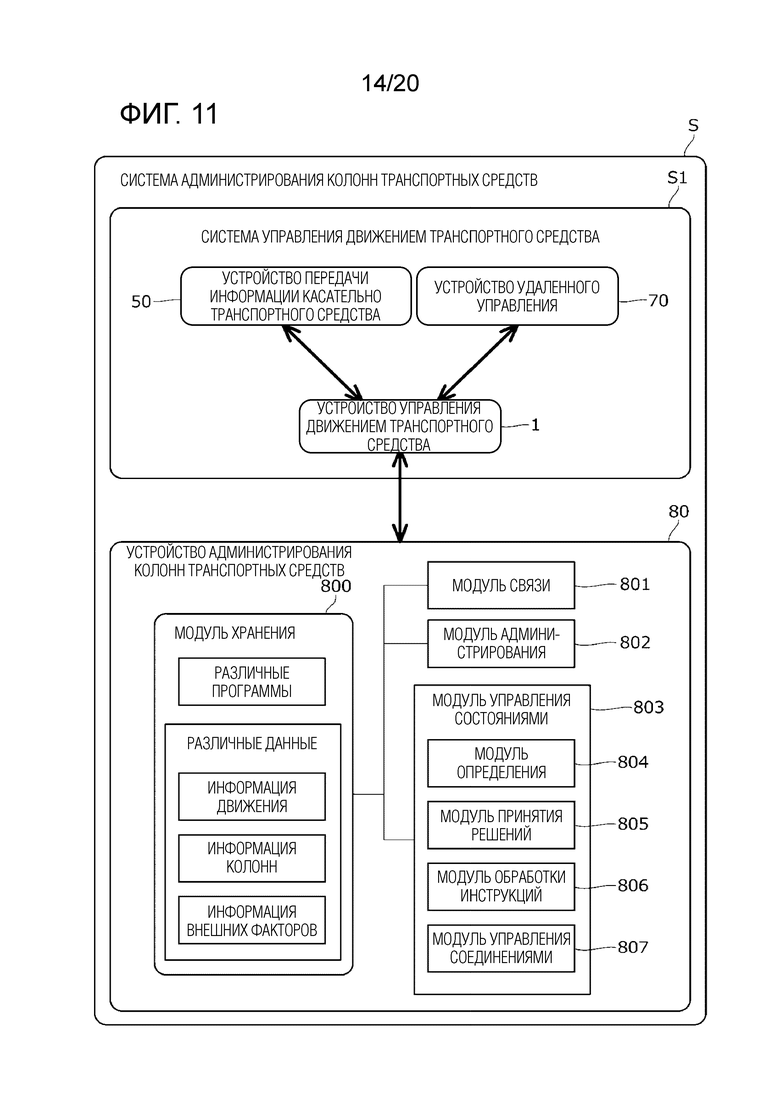
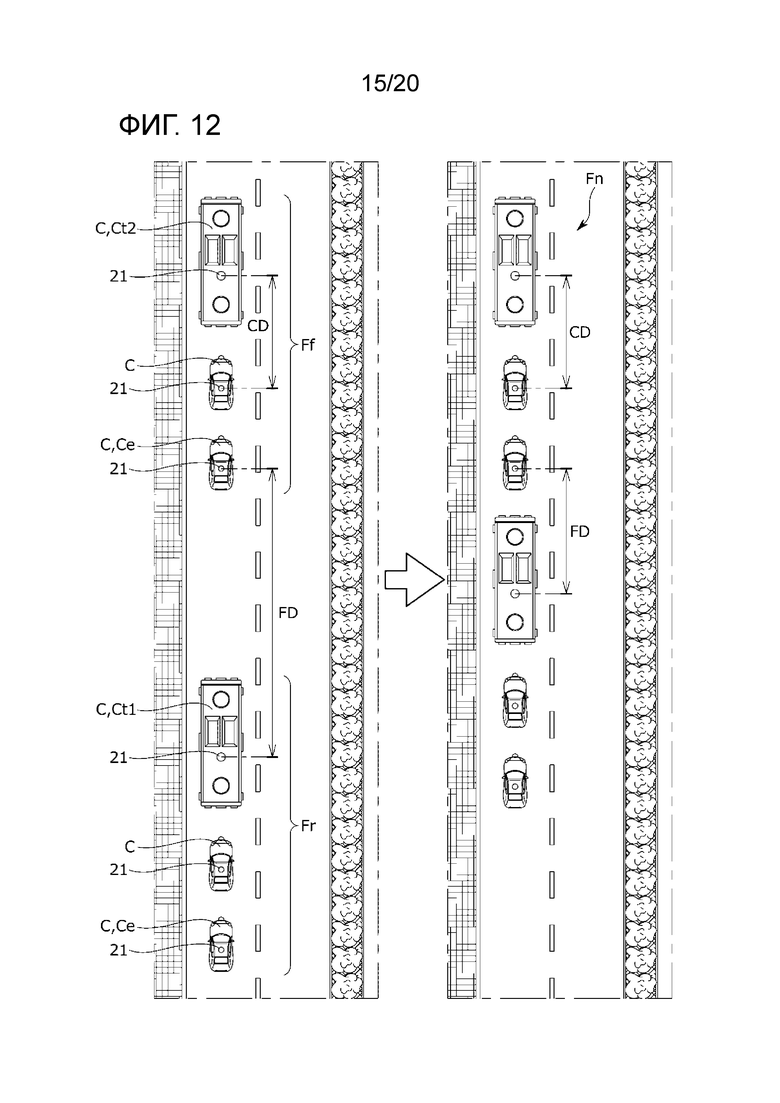
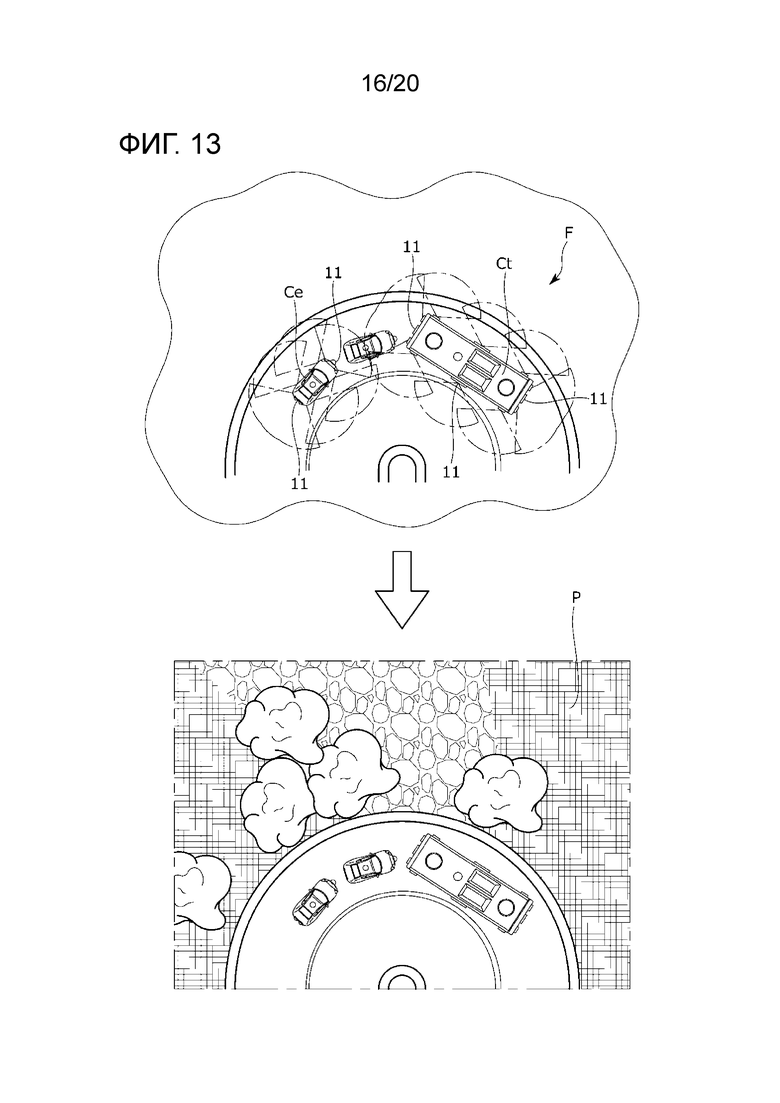
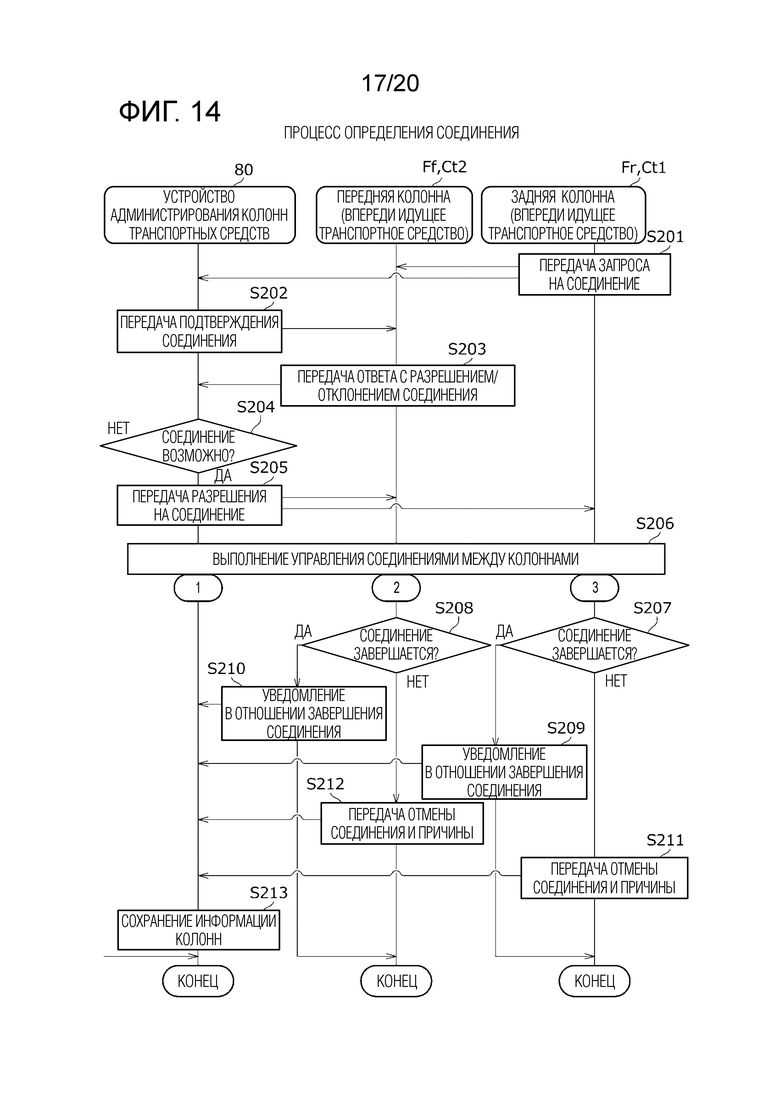
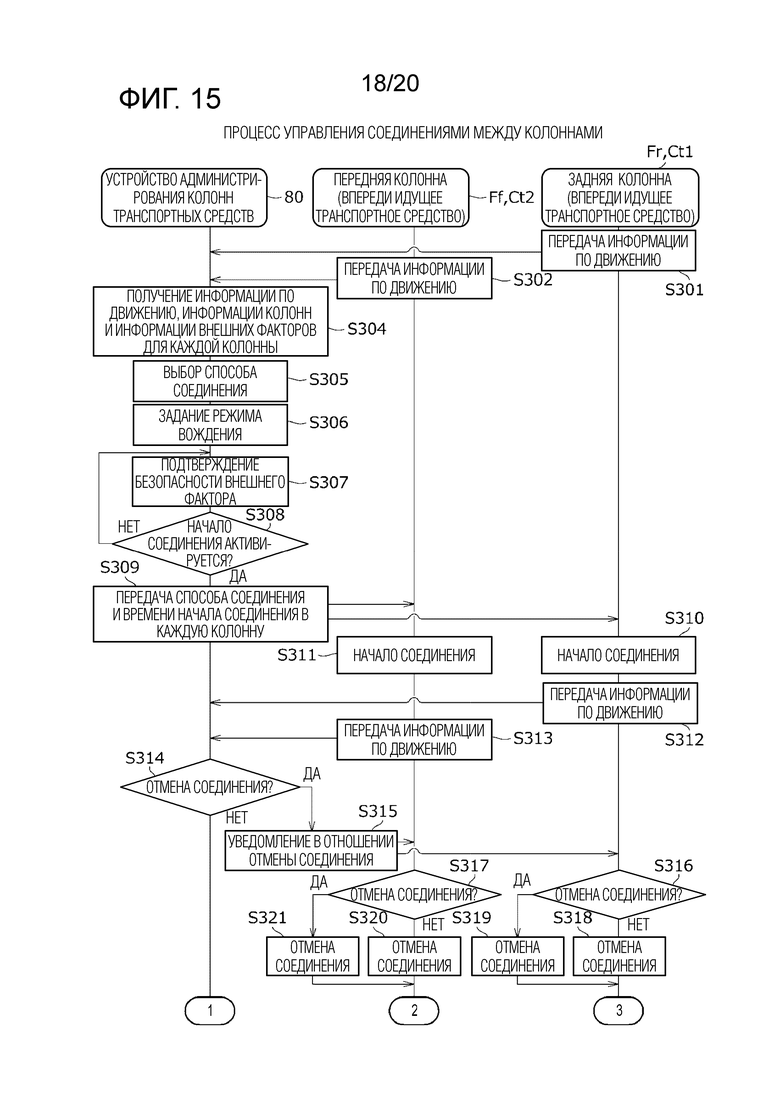
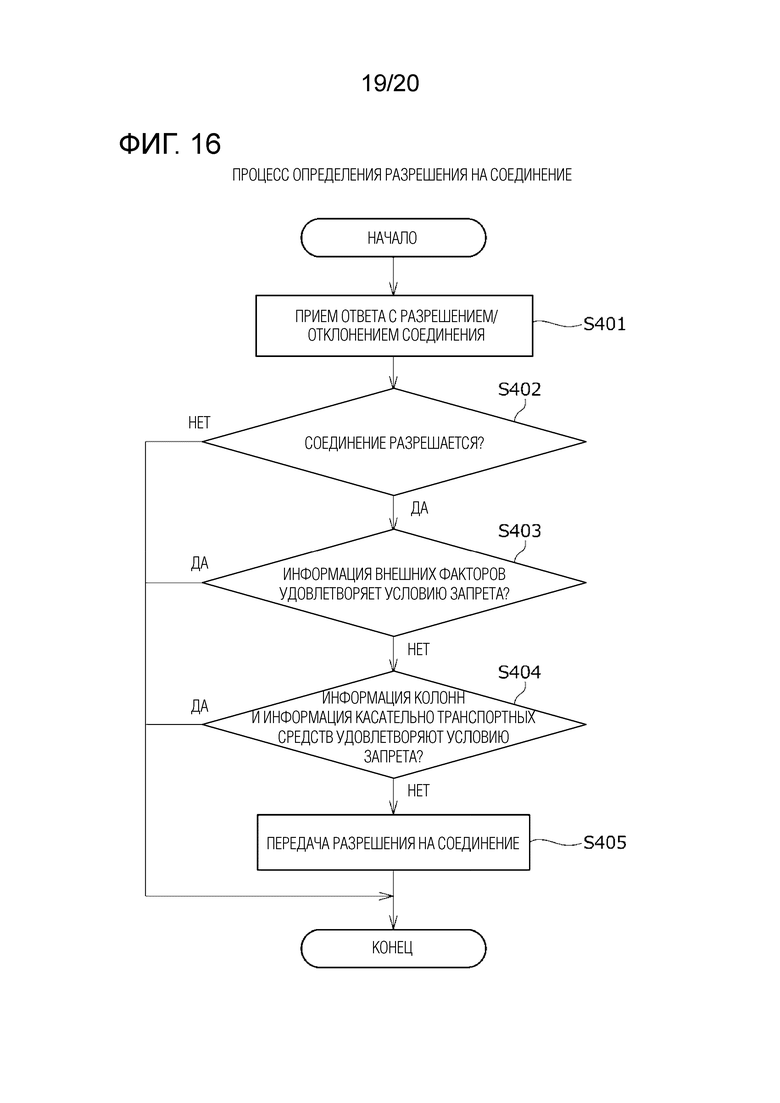
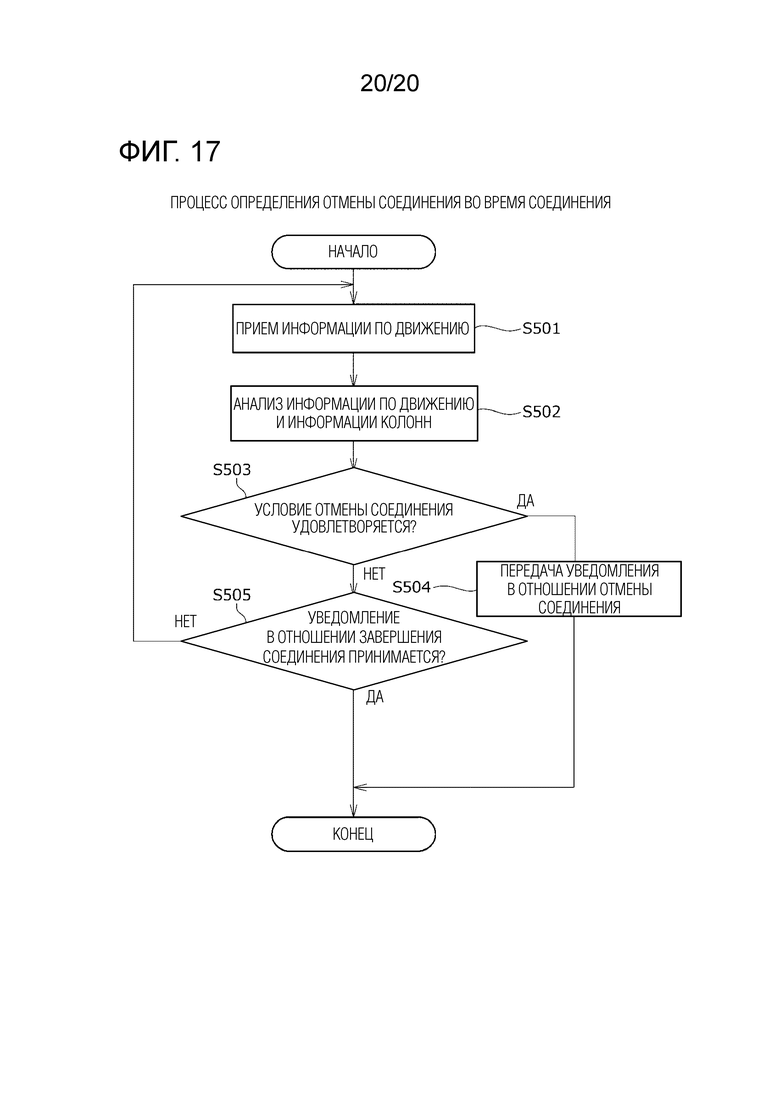
Группа изобретений относится к устройству, способу для получения информации позиции и машиночитаемому носителю записи для управления транспортным средством. Устройство выполнено с возможностью управления движением транспортного средства на основе информации позиции транспортного средства. Устройство управления движением связано с устройством удаленного управления через сеть. Устройство управления движением содержит: модуль вычисления абсолютной позиции, модуль определения приема, модуль вычисления относительной позиции, модуль связи, модуль вычисления позиции коррекции. Модуль вычисления абсолютной позиции получает GNSS-информацию от приемного GNSS-устройства и вычисляет абсолютную позицию транспортного средства. Модуль определения приема определяет возможность приема информации GNSS-коррекции от внешней опорной станции. Модуль вычисления относительной позиции вычисляет относительную позицию транспортного средства с использованием информации GNSS-коррекции. Модуль связи передает информацию позиции транспортного средства в устройство удаленного управления. Модуль вычисления позиции коррекции получает информацию ускорения и угловой скорости транспортного средства и вычисляет скорректированную относительную позицию. Достигается повышение безопасности управления транспортными средствами. 3 н.п. ф-лы, 21 ил.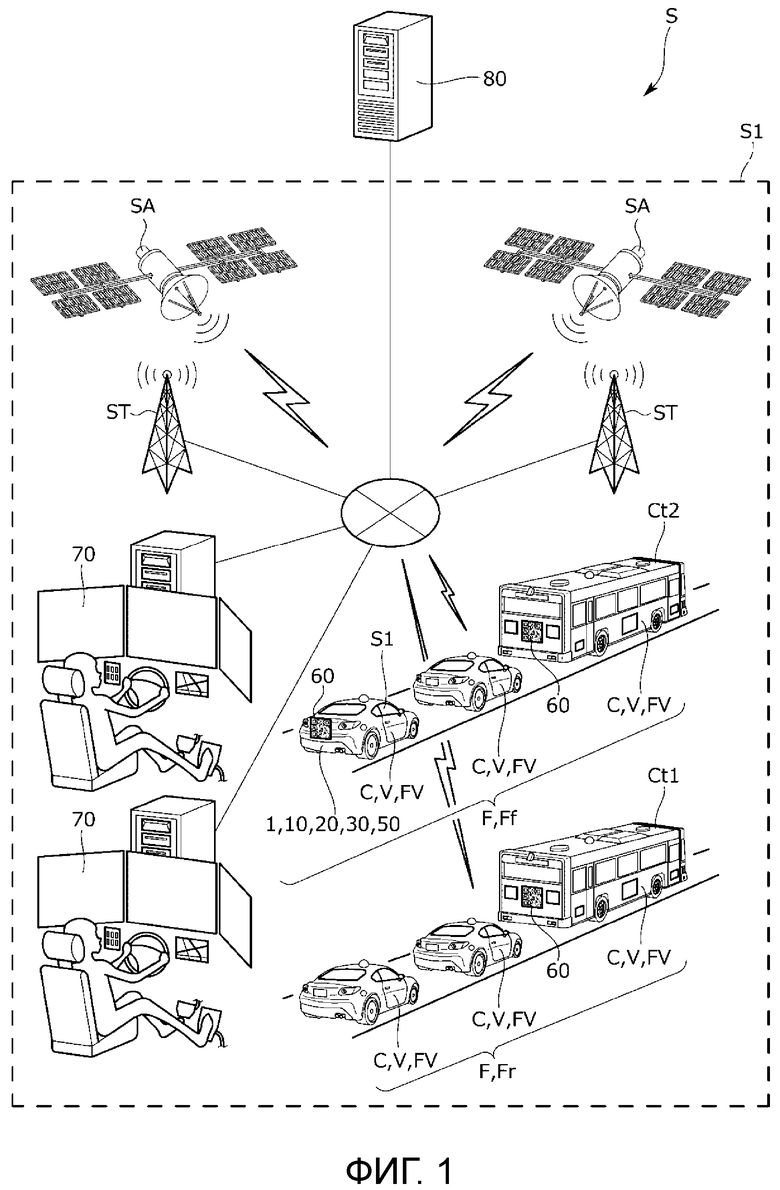
1. Устройство управления движением транспортного средства, выполненное с возможностью управлять движением транспортного средства на основе информации позиции транспортного средства,
причем устройство управления движением транспортного средства соединяется с устройством удаленного управления, выполненным с возможностью управлять движением транспортного средства через связь через сеть,
причем устройство управления движением транспортного средства содержит:
модуль вычисления абсолютной позиции, выполненный с возможностью получать GNSS-информацию от приемного GNSS-устройства, смонтированного на транспортном средстве, и вычислять абсолютную позицию транспортного средства с использованием GNSS-информации;
модуль определения приема, выполненный с возможностью определять, может или нет информация GNSS-коррекции приниматься от внешней опорной станции;
модуль вычисления относительной позиции, выполненный с возможностью вычислять относительную позицию транспортного средства с использованием информации GNSS-коррекции; и
модуль связи, выполненный с возможностью передавать информацию позиции транспортного средства в устройство удаленного управления,
при этом модуль связи выполнен с возможностью:
передавать в устройство удаленного управления информацию позиции на основе относительной позиции в случае, в котором информация GNSS-коррекции может приниматься; и
передавать в устройство удаленного управления информацию позиции на основе абсолютной позиции в случае, в котором информация GNSS-коррекции не может приниматься,
при этом устройство управления движением транспортного средства дополнительно содержит модуль вычисления позиции коррекции, выполненный с возможностью получать информацию ускорения и угловой скорости транспортного средства из модуля инерциальных измерений, смонтированного на транспортном средстве, и вычислять скорректированную относительную позицию, полученную посредством коррекции относительной позиции транспортного средства на основе информации GNSS-коррекции и информации ускорения и угловой скорости,
при этом в случае, в котором информация GNSS-коррекции может приниматься, информация позиции транспортного средства представляет собой информацию позиции, указываемую с использованием скорректированной относительной позиции, полученной посредством коррекции относительной позиции,
при этом модуль определения приема дополнительно выполнен с возможностью:
определять, может или нет GNSS-информация приниматься, и
определять в ответ на определение того, что GNSS-информация может приниматься, может или нет информация GNSS-коррекции затем приниматься, и
при этом в ответ на определение того, что GNSS-информация не может приниматься, позиция транспортного средства указывается с использованием оцененной позиции транспортного средства, вычисленной на основе принятой самой последней GNSS-информации и информации ускорения и угловой скорости.
2. Способ для получения информации позиции транспортного средства, осуществляемый посредством компьютера, выполненного с возможностью управлять движением транспортного средства на основе информации позиции транспортного средства, при этом упомянутый способ содержит этапы, на которых:
посредством компьютера, соединенного с устройством удаленного управления, выполненным с возможностью управлять движением транспортного средства через связь через сеть:
получают GNSS-информацию от приемного GNSS-устройства, смонтированного на транспортном средстве, и вычисляют абсолютную позицию транспортного средства с использованием GNSS-информации;
определяют, может или нет информация GNSS-коррекции приниматься от внешней опорной станции;
вычисляют относительную позицию транспортного средства с использованием информации GNSS-коррекции; и
передают информацию позиции на основе относительной позиции в устройство удаленного управления в случае, в котором информация GNSS-коррекции может приниматься; и
передают информацию позиции на основе абсолютной позиции в устройство удаленного управления в случае, в котором информация GNSS-коррекции не может приниматься,
при этом упомянутый способ дополнительно содержит этапы, на которых получают информацию ускорения и угловой скорости транспортного средства из модуля инерциальных измерений, смонтированного на транспортном средстве, и вычисляют скорректированную относительную позицию, полученную посредством коррекции относительной позиции транспортного средства на основе информации GNSS-коррекции и информации ускорения и угловой скорости,
при этом в случае, в котором информация GNSS-коррекции может приниматься, информация позиции транспортного средства представляет собой информацию позиции, указываемую с использованием скорректированной относительной позиции, полученной посредством коррекции относительной позиции,
при этом упомянутый способ дополнительно содержит этапы, на которых:
определяют, может или нет GNSS-информация приниматься, и
определяют в ответ на определение того, что GNSS-информация может приниматься, может или нет информация GNSS-коррекции затем приниматься, и
при этом в ответ на определение того, что GNSS-информация не может приниматься, позиция транспортного средства указывается с использованием оцененной позиции транспортного средства, вычисленной на основе принятой самой последней GNSS-информации и информации ускорения и угловой скорости.
3. Машиночитаемый носитель записи, хранящий программу для получения информации позиции транспортного средства, причем программа инструктирует компьютеру, при этом компьютер служит в качестве устройства управления движением транспортного средства, выполненного с возможностью управлять движением транспортного средства на основе информации позиции транспортного средства, выполнять процессы, содержащие:
процесс получения GNSS-информации от приемного GNSS-устройства, смонтированного на транспортном средстве, и вычисления абсолютной позиции транспортного средства с использованием GNSS-информации;
процесс определения, может или нет информация GNSS-коррекции приниматься от внешней опорной станции;
процесс вычисления относительной позиции транспортного средства с использованием информации GNSS-коррекции; и
процесс передачи информации позиции на основе относительной позиции в устройство удаленного управления, выполненное с возможностью управлять движением транспортного средства через связь с компьютером через сеть в случае, в котором информация GNSS-коррекции может приниматься, и передачи информации позиции на основе абсолютной позиции в устройство удаленного управления в случае, в котором информация GNSS-коррекции не может приниматься,
при этом процессы дополнительно содержат процесс получения информации ускорения и угловой скорости транспортного средства из модуля инерциальных измерений, смонтированного на транспортном средстве, и вычисления скорректированной относительной позиции, полученной посредством коррекции относительной позиции транспортного средства на основе информации GNSS-коррекции и информации ускорения и угловой скорости,
при этом в случае, в котором информация GNSS-коррекции может приниматься, информация позиции транспортного средства представляет собой информацию позиции, указываемую с использованием скорректированной относительной позиции, полученной посредством коррекции относительной позиции,
при этом процессы дополнительно содержат:
процесс определения, может или нет GNSS-информация приниматься, и
процесс определения в ответ на определение того, что GNSS-информация может приниматься, может или нет информация GNSS-коррекции затем приниматься, и
при этом в ответ на определение того, что GNSS-информация не может приниматься, позиция транспортного средства указывается с использованием оцененной позиции транспортного средства, вычисленной на основе принятой самой последней GNSS-информации и информации ускорения и угловой скорости.
| JP H11183593 A, 09.07.1999 | |||
| JP 2006003448 A, 05.01.2006. |

