Изобретение относится к авиационным трансарктическим системам с опционально и дистанционно пилотируемыми конвертопланами-ракетоносцами, имеющими двунаправленное крыло с двусторонней симметрией в двух перпендикулярных плоскостях, смонтированное на поворотном шарнире подкрыльного фюзеляжа-гондолы с двумя комбинированными газотурбинными двигателями и свободными силовыми турбинами, приводящими подъемные вентиляторы (ПВ) и в кольцевых обтекателях два турбовентилятора, создающих при вертикальном и коротком взлете/по-садке (ВВП и КВП) подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными ПВ при автоматически открытых/закрытых поперечных верхних жалюзи-створках и нижних жалюзи-рулей крыльевых кольцевых обтекателей в конфигурации реактивных самолетов при выполнении ВВП, КВП/горизонтальном полете, несущих управляемые ракеты, используемых с атомного авианесущего ледокола.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Известен беспилотный самолет проекта "X-plane" компании "Northrop Grumman" (США) [http://test.abovetopsecret.com/forum/thread398541/pg1], выполненный по схеме летающее крыло асимметрично изменяемой стреловидности (КАИС), имеет два турбореактивных двухконтурных двигателя (ТРДД) в мотогондоле с внутренними бомбоотсеками и трехопорным убирающимся колесным шасси. Для сверхзвукового полета "X-plane" его ТРДД General Electric J85-21 имеют реактивную тягу 4485 кгс, что на высоте полета 11 км обеспечивает скорость 1275/1488 км/ч при тяговооруженности 0,54/0,68. Известные самолеты с КАИС имеют ряд недостатков, основными из которых являются: смещение аэродинамического фокуса при разнонаправленной стреловидности, что приводит к увеличению балансировочного сопротивления; возрастание массы конструкции из-за наличия поворотных шарниров консолей. Кроме того, при большом угле 45° стреловидности консоль с прямой стреловидностью имеет больший эффективный угол атаки, чем консоль с обратной стреловидностью, что приводит к асимметрии лобового сопротивления и, как следствие, к возникновению паразитных разворачивающих моментов по крену, тангажу и рысканию. Более того, для КАИС характерны вдвое больший рост толщины пограничного слоя вдоль размаха, и любой несимметричный срыв потока вызывает интенсивные возмущения, а их устранение может быть осуществлено путем использования двунаправленного крыла.
Наиболее близким к предлагаемому изобретению является палубный авиационный комплекс (ПАК) "Icara" (Великобритания) с беспилотным летательным аппаратом (БЛА) [http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml], имеющим фюзеляж, пусковое устройство (ПУ) с управляемой ракетой, крыло с органами его управления, двигатель силовой установки (СУ), систему управления, обеспечивающую телемеханическое управление с командного пункта корабля-носителя.
Признаки, совпадающие - габариты БЛА без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: самонаводящаяся противолодочная малогабаритная торпеда (МГТ) Mk.44. Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса БЛА с торпедой Mk.44 составляющего 1480 кг (при массе 13% целевой нагрузки - торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на БЛА в полете. По прибытии БЛА в район нахождения цели торпеда (самонаводящаяся МГТ Mk.44), полу утопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БЛА продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном британском ПАК модели "Icara" увеличения целевой нагрузки (ЦН) и весовой отдачи, повышения скорости и дальности полета, а также вероятности поражения надводной или наземной цели, расположенной на большой дальности, но и возврата на вертолетную площадку атомного авианесущего ледокола (АНЛ) для повторного использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного британского ПАК модели "Icara", наиболее близкой к нему, являются наличие того, что стратегическая авиационная трансарктическая система (АТАС) имеет группу аппаратов вертикального взлета и посадки (ВВП) корабельного базирования, включающую более чем один опционально пилотируемый конвертоплан-ракетоносец (ОПКР) с более чем одним дистанционно пилотируемым конвертопланом-ракетоносцем (ДПКР), используемую более чем с одной вертолетной площадки атомного АНЛ, причем каждый ДПКР и ОПКР выполнен по гибридной компоновке, по меньшей мере, с одним двунаправленным крылом (ДНК), имеющим двустороннюю симметрию в двух перпендикулярных плоскостях и в любом из двух положений на 90° равно- или разновеликие по размаху трапециевидные и ромбовидные консоли соответственно с округлыми и треугольными их законцовками, интегрированным с подкрыльным фюзеляжем-гондолой (ПФГ) и его шарниром, обеспечивающим механизмом следящего привода от исходного по оси симметрии положения в плане ромбовидных консолей ДНК их поворот в горизонтальной плоскости на угол 90° против или обратно по часовой стрелки так, что трапециевидные/ромбовидные и ромбовидные/трапециевидные консоли ДНК устанавливаются в плане соответственно по оси/перпендикулярно к оси симметрии, фиксируются в последнем положении, например, трапециевидные большие/ромбовидные меньшие консоли ДНК с соответствующим их удлинением λ=3,3…4,3λ=2,5, но и содержит на трапециевидных консолях ДНК многовентиляторную поперечную несущую систему (МПНС), используемую при ее установке с этими консолями перпендикулярно к плоскости симметрии на переходных и разгонных режимах полета, выполнении ВВП, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), но и включающую, по меньшей мере, два подъемных вентилятора (ПВ), равноудаленных в плане от центра масс, смонтированных в крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные как верхние жалюзи-створки, так и нижние жалюзи-рули, обеспечивающие свободный доступ воздуха в соответствующие ККО и выхода из них воздушного потока, не обдувающего ПФГ, и образующие после их закрывания назад по полету соответствующие поверхности ДНК, но и снабжен по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), смонтированными в кормовой части ПФГ, оснащены боковыми воздухозаборниками и круглыми соплами со всера-курсным управлением вектором тяги (ВУВТ) и выполнены в виде двухконтурных реактивных двигателей, имеющих однорядный турбовентилятор (ОТВ) в кольцевом обтекателе (КО) и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие ПВ в ККО и/или ОТВ в КО, создающие в пропульсивно-реактивной системе (ПРС) синхронную реактивную тягу при выполнении ВВП, КВП и КВВП или горизонтальном поступательном полете, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с КГтД, приводящими, например, в МПНС-Х2 пару ПВ и/или два ОТВ в ПРС-R2, создающие при этом подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными ПВ при автоматически открытых/закрытых верхних створках и нижних жалюзи-рулей их ККО в конфигурации реактивных сверх- или трансзвукового самолета соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом в системе трансмиссии каждый ее КГтД размещен в кормовой гондоле ПФГ, в которой между ОТВ и ССТ смонтирован соосно с двумя последними Т-образный в плане редуктор, имеющий продольные по его оси входные валы, например, от двух ССТ, но и продольный и поперечный выходные валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй синхронизирующий вал передает крутящий момент на Т-образный в плане главный редуктор, выходной вал которого через муфту сцепления вращательно связан с угловым редуктором, вертикальная колонка выходного вала которого, являясь жесткой осью поворотного шарнира ДНК, размещена соосно с последним, имеет вал, который вращательно связан через муфту сцепления с Т-образным при виде сзади редуктором, передающим его выходными валами, проложенными внутри трапециевидных консолей ДНК и ребер жесткости ККО, равновеликую мощность на угловые редукторы ПВ.
Кроме того, в упомянутых ОПКР и ДПКР для уменьшения в 1,8…2,3 раза стояночной их площади от взлетной концевые части ромбовидных консолей ДНК выполнены складывающимися вниз при упомянутой по оси симметрии фиксации трапециевидных консолей ДНК, а их система управления циркуляцией воздушного потока, обеспечивающая направление от компрессора каждого КГтД сверхзвуковых воздушных потоков, которые на режимах ВВП и зависания для изменения балансировки по тангажу подаются к струйным рулям по продольным воздуховодам к их клапанам и выдуваются поочередно из реактивных верхнего или нижнего кормового сопла (КС) при открытой соответствующей автоматической створке, образующей при ее закрытии соответствующую поверхность кормового обтекателя, а на режимах их ВВП и зависания для выполнения подъема и изменения балансировки как по крену, так и курсу упомянутые жалюзи-рули, например, в левом и правом их ККО, которые установлены на поперечной средней линии упомянутых трапециевидных консолей ДНК, проходящей в плане через центр масс, выполнены с возможностью дифференциального отклонения от центра ККО на углы вперед по полету -40° и назад +40° как поочередно в одном из ККО с одной стороны передних и задних их жалюзи-рулей, так и одновременно в паре ККО с двух сторон передних с задними жалюзи-рулей соответственно, а в полетной их конфигурации реактивного самолета изменение балансировки по тангажу, курсу и крену создается соответственно синфазным и дифференциальным отклонением в двух КГтД их реактивных сопел с упомянутыми ВУВТ обоих вертикально вверх-вниз, обоих горизонтально влево-вправо и вертикально одного вверх, а другого вниз, но и повышение путевой устойчивости при скорости их полета М=0,7…М=1,4 концевые части их ромбовидных консолей, смонтированных с ДНК по правилу площадей, отклоняются вниз на угол 30°, причем на режимах ВВП и зависания ОПКР и ДПКР при удельной нагрузке на мощность их комбинированной СУ, составляющей ρN=1,15 кг/л.с, каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности, например, в МПНС-Х2, составляющей с учетом потерь от обдува ребер жесткости ККО ρВТ=1,15, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ПВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ПВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в МПНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их ПФГ, и дисков вращения их ПВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их ПФГ с их колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПФГ и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, при этом каждый ОПКР и ДПКР, выполненный соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПКР и возможностью опционального его управления пилотами из кабины ПФГ, а нижние бомбоотсеки их ПФГ имеют внутреннее вооружение с автоматическими створками и их упомянутыми ПУ с закрепленными на них УР воздух-воздух и авиационными крылатыми ракетами (АКР), обеспечивающими соответственно борьбу с воздушной и наземной, надводной целью, а их комплекс вооружения имеет авиационную пушку, установленную в обтекателе сверху носовой части ПФГ, поражающую дозвуковые ударные БЛА и АКР, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, причем тяжеловооруженные ДПКР и ОПКР, несущие в конфигурации реактивного самолета в бомбоотсеках их ПФГ соответственно АКР типа Х-555 и X101 для создания буферной безопасной авиазоны между головным ОПКР и ПВО цели, увеличивающей дальность действия до 4750/7750 км соответственно стратегических АКР типа Х-555/Х-101, образующими после их запуска автономные рои АКР с буксируемыми ложными их целями, а их ПФГ, имеющий от пирамидальной носовой его части скошенные по всей его длине их боковые стороны, образующие с упомянутыми воздухозаборниками при виде спереди пяти- или шестигранное поперечное его сечение, уменьшающее эффективную площадь рассеивания, а их ПФГ на конце хвостовых балок имеет либо цельно-поворотные кили, отклоненные вверх или вниз и наружу от плоскости симметрии под углом 47° к горизонтали, либо стреловидный стабилизатор с концевыми киль-шайбами, образующими при виде спереди U-образное оперение, а их ПФГ между сопел КГтД снабжен, вынесенным вдоль продольной его оси и от конца, кормовым обтекателем с отсеком, снабженным на его конце выдвижной буксируемой на тросе ложной целью, при этом электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается внизу носовой части ПФГ головного ОПКР и с радаром последнего обеспечивает на больших, безопасных для ОПКР расстояниях целеуказание и управление оружейными нагрузками ОПКР и ДПКР с наведением на цель их АКР класса воздух-земля и их УР воздух-воздух, а управление ДПКР обеспечивается вторым пилотом ОПКР, используя маловысотный профиль полета и систему самообороны ДПКР-станцию активных электронных помех, причем упомянутая БСУ головного ОПКР, выполненного с электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления пилотом и/или их комбинации, снабжена возможностью опционального его управления пилотами из кабины, смонтированной в их ПФГ, имеющих катапультируемые в верхнюю полусферу кресла, срабатывающие автоматически при выполнении ВВП и зависания, но и его использования в составе авиагруппы в качестве головного с упомянутыми более чем двумя ДПКР, более чем один из которых, являясь ведомым, автоматически повторяет его системой автопилота в следящем полете маневры головного ОПКР, а другой - управляется вторым пилотом с головного ОПКР, а затем наоборот, причем при отсутствии вмешательства пилота система автопилота выполняет управление полетом ведомого ДПКР в соответствии с командами текущего состояния, повторяющими профиль полета и изменение маршрута головного ОПКР, при этом в случае возникновения внештатной ситуации, то для устранения непредвиденных проблем с безопасностью выполнения следящего полета пилот принимает на себя непосредственное управление ведомым ДПКР, отменяя команды текущего состояния, выдаваемые автопилотом при автономной работе следящего полета, причем система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПКР, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПКР, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПКР и головным ОПКР; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПКР, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПКР относительно ОПКР, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, при этом каждый сенсорный компьютер предыдущего и последующего из ведомых ДПКР, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного ОПКР и предыдущего ДПКР; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета, и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета каждого ДПКР в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному стратегическому роению.
Кроме того, в упомянутых ОПКР и ДПКР система управления формированием их относительной позиции в полете с один или несколькими датчиками, включают в себя один или несколько инфракрасных (ИК) датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПКР для получения глобальных данных о местоположении от ведомого ДПКР, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПКР, передаваемого на ведомый ДПКР, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПКР, обеспечивающей упомянутый следящий полет ведомого ДПКР, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПКР небезопасен для относительного его положения от ведомого ДПКР, но и отключающего формирование упомянутого следящего полета ведомым ДПКР через компьютер управления полетом.
Кроме того, в упомянутых ОПСВ и ДПСВ их ДНК с трапециевидными консолями, выполненными с относительной толщиной их профиля  и сужением ηднк=0,53, оснащенными по всему размаху предкрылками и закрылками, имеет упомянутые ромбовидные консоли с относительной толщиной их профиля
и сужением ηднк=0,53, оснащенными по всему размаху предкрылками и закрылками, имеет упомянутые ромбовидные консоли с относительной толщиной их профиля  а для трансзвукового режима полета с промежуточной под углом 45° к оси симметрии фиксацией их консолей ДНК, преобразуя последнее в двунаправленное крыло асимметрично изменяемой стреловидности, которое при маршевой тяговоуроженности первого уровня - 0,246 или второго - 0,3, используя соответственно 22% или 30% мощность их СУ, обеспечивает на высоте 11 км скорость 0,829 Маха (М) или М=0,942, а для сверхзвукового режима полета с упомянутой фиксацией их трапециевидных консолей ДНК так, что в С-образном при виде сбоку переднем обтекателе ПФГ, размещенном за кабиной в верхней его утонченности, фиксируется законцовка правой его консоли, используя при этом 72% или 100% мощности их СУ, достигается при маршевой тяговоуроженности третьего/четвертого уровня Кмт=0,54/0,68 соответственно сверхзвуковая скорость М=1,2/М=1,4, а планер ОПКР, не имея застекленной поверхности кабины, содержащей средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом изображение проходит цифровую корректировку и для управления в режиме реального времени отображается модулем распределения видео на дисплеях кабины или видны на нашлемных дисплеях пилотов, которые подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях соответственно.
а для трансзвукового режима полета с промежуточной под углом 45° к оси симметрии фиксацией их консолей ДНК, преобразуя последнее в двунаправленное крыло асимметрично изменяемой стреловидности, которое при маршевой тяговоуроженности первого уровня - 0,246 или второго - 0,3, используя соответственно 22% или 30% мощность их СУ, обеспечивает на высоте 11 км скорость 0,829 Маха (М) или М=0,942, а для сверхзвукового режима полета с упомянутой фиксацией их трапециевидных консолей ДНК так, что в С-образном при виде сбоку переднем обтекателе ПФГ, размещенном за кабиной в верхней его утонченности, фиксируется законцовка правой его консоли, используя при этом 72% или 100% мощности их СУ, достигается при маршевой тяговоуроженности третьего/четвертого уровня Кмт=0,54/0,68 соответственно сверхзвуковая скорость М=1,2/М=1,4, а планер ОПКР, не имея застекленной поверхности кабины, содержащей средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом изображение проходит цифровую корректировку и для управления в режиме реального времени отображается модулем распределения видео на дисплеях кабины или видны на нашлемных дисплеях пилотов, которые подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях соответственно.
Благодаря наличию этих признаков, которые позволят освоить стратегическую АТАС, имеющую группу аппаратов вертикального взлета и посадки (ВВП) корабельного базирования, включающую более чем один опционально пилотируемый конвертоплан-ракетоносец (ОПКР) с более чем одним дистанционно пилотируемым конвертопланом-ракетоносцем (ДПКР), используемую более чем с одной вертолетной площадки атомного АНЛ, причем каждый ДПКР и ОПКР выполнен по гибридной компоновке, по меньшей мере, с одним двунаправленным крылом (ДНК), имеющим двустороннюю симметрию в двух перпендикулярных плоскостях и в любом из двух положений на 90° равно- или разновеликие по размаху трапециевидные и ромбовидные консоли соответственно с округлыми и треугольными их законцовками, интегрированным с подкрыльным фюзеляжем-гондолой (ПФГ) и его шарниром, обеспечивающим механизмом следящего привода от исходного по оси симметрии положения в плане ромбовидных консолей ДНК их поворот в горизонтальной плоскости на угол 90° против или обратно по часовой стрелки так, что трапециевидные/ромбовидные и ромбовидные/трапециевидные консоли ДНК устанавливаются в плане соответственно по оси/перпендикулярно к оси симметрии, фиксируются в последнем положении, например, трапециевидные большие/ромбовидные меньшие консоли ДНК с соответствующим их удлинением λ=3,3…4,3λ=2,5, но и содержит на трапециевидных консолях ДНК многовентиляторную поперечную несущую систему (МПНС), используемую при ее установке с этими консолями перпендикулярно к плоскости симметрии на переходных и разгонных режимах полета, выполнении ВВП, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), но и включающую, по меньшей мере, два подъемных вентилятора (ПВ), равноудаленных в плане от центра масс, смонтированных в крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные как верхние жалюзи-створки, так и нижние жалюзи-рули, обеспечивающие свободный доступ воздуха в соответствующие ККО и выхода из них воздушного потока, не обдувающего ПФГ, и образующие после их закрывания назад по полету соответствующие поверхности ДНК, но и снабжен по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), смонтированными в кормовой части ПФГ, оснащены боковыми воздухозаборниками и круглыми соплами со всеракурсным управлением вектором тяги (ВУВТ) и выполнены в виде двухконтурных реактивных двигателей, имеющих однорядный турбовентилятор (ОТВ) в кольцевом обтекателе (КО) и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие ПВ в ККО и/или ОТВ в КО, создающие в пропульсивно-реактивной системе (ПРС) синхронную реактивную тягу при выполнении ВВП, КВП и КВВП или горизонтальном поступательном полете, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с КГтД, приводящими, например, в МПНС-Х2 пару ПВ и/или два ОТВ в ПРС-R2, создающие при этом подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными ПВ при автоматически открытых/закрытых верхних створках и нижних жалюзи-рулей их ККО в конфигурации реактивных сверх- или трансзвукового самолета соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом в системе трансмиссии каждый ее КГтД размещен в кормовой гондоле ПФГ, в которой между ОТВ и ССТ смонтирован соосно с двумя последними Т-образный в плане редуктор, имеющий продольные по его оси входные валы, например, от двух ССТ, но и продольный и поперечный выходные валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй синхронизирующий вал передает крутящий момент на Т-образный в плане главный редуктор, выходной вал которого через муфту сцепления вращательно связан с угловым редуктором, вертикальная колонка выходного вала которого, являясь жесткой осью поворотного шарнира ДНК, размещена соосно с последним, имеет вал, который вращательно связан через муфту сцепления с Т-образным при виде сзади редуктором, передающим его выходными валами, проложенными внутри трапециевидных консолей ДНК и ребер жесткости ККО, равновеликую мощность на угловые редукторы ПВ. Все это позволит в тяжеловооруженных ОПКР и ДПКР с ДНК двусторонней симметрии и при наличии ВУВТ круглых реактивных сопел их КГтД упростить управляемость и обеспечить ее стабильность. Размещение поперечных ПВ в ККО трапециевидных консолей ДНК вблизи центра масс обеспечивает предсказуемость и стабильность управления при висении, а оснащение на выходе ККО нижними жалюзи-рулями позволит упростить управление, уменьшить вес планера, улучшить весовую отдачу и повысить дальность полета реактивных ОПКР и ДПКР, выполненных по малозаметной технологии, но и без застекленной поверхности кабины ОПКР, содержащей средства отображения цифрового изображения на дисплеях кабины или на нашлемных дисплеях пилотов. Последнее увеличивает вероятность поражения цели, повышает эффективность применения палубных ОПКР и ДПКР, особенно, при барражирующем трансзвуковом их полете. В случае отказа в комбинированной СУ одной из ССТ на режиме зависания реактивных ОПКР и ДПКР их КГтД выполнены с автоматическим выравниванием и равным перераспределением при этом оставшейся мощности ССТ между ПВ, что повышает безопасность. Использование поворотного ДНК позволит уменьшить аэродинамическое сопротивление в конфигурации реактивного самолета и на безфорсажных режимах работы КГтД достичь на высоте 11 км транс- и сверхзвуковой скорости соответственно 1000 км/ч и 1275…1488 км/ч.
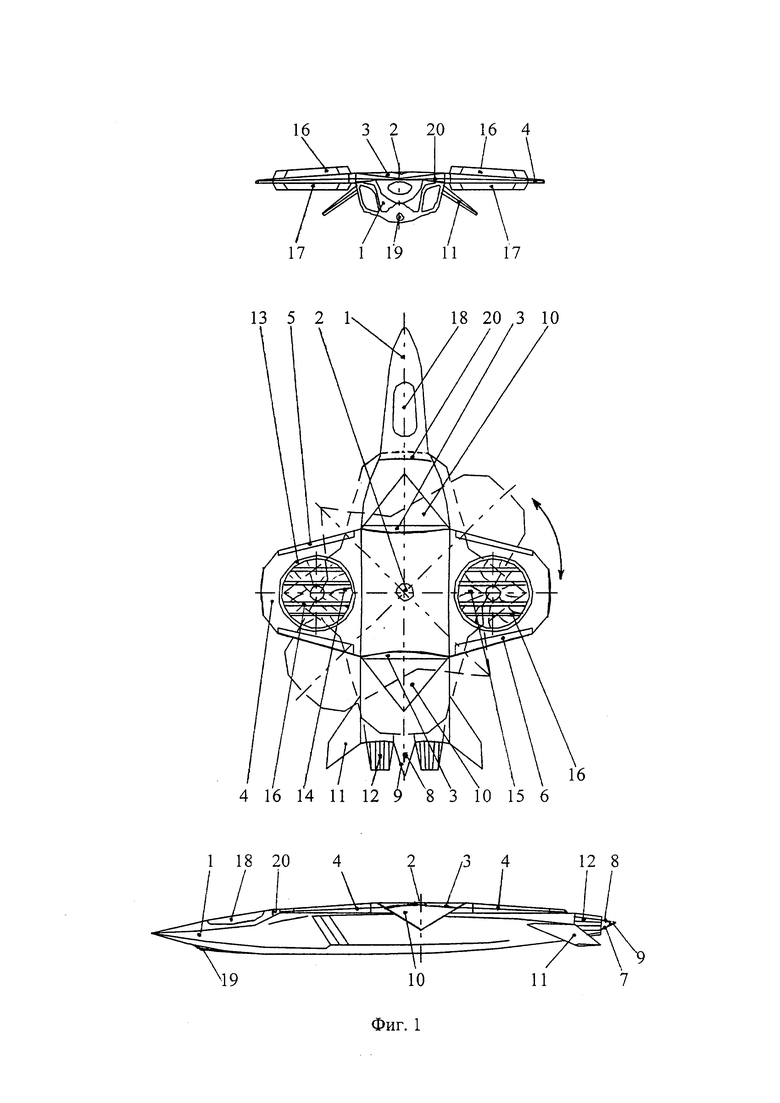
Предлагаемое изобретение АТАС с реактивными ОПКР и ДПКР, имеющими ДНК с разновеликими консолями, КГтД с ВУВТ реактивных их сопел, приводящие в МПНС-Х2 пару ПВ в ККО и два ОТВ в КО кормовых гондол ПФГ в ПРС-R2, иллюстрируется на фиг. 1 и общих видах спереди, сверху и сбоку соответственно a), б) и в):
а) в конфигурации самолета КВП с КГтД, питающими КС 7-8, приводящими ПВ с ОТВ и отклоненными как предкрылками и закрылками трапециевидных консолей ДНК, так и жалюзи-рулями назад по полету и соплами с ВУВТ вниз под углом 15°;
б) в конфигурации самолета ВВП с КГтД, питающими два КС 7-8, приводящими два ПВ с открытыми верхними створками и нижними жалюзи-рулями их ККО в ДНК, показанным в промежуточном положении пунктиром под углом 45° к оси симметрии;
в) в конфигурации сверхзвукового самолета с закрытыми верхними створками и нижними жалюзи-рулями ККО, организующими соответствующие поверхности ДНК и размещением перпендикулярно к оси симметрии меньших их консолей, отклоненных с их концевыми частями вниз под углом 30° при скорости полета М=0,7-М=1,4.
Стратегическая АТАС с реактивными ОПКР и ДПКР представлена на фиг. 1 одним ОПКР, выполненным по концепции МПНС-Х2 и ПРС-R2 с планером по малозаметной технологии из алюминиевых сплавов и композитного углепластика, имеет ПФГ 1, поворотный шарнир 2 ДНК с меньшими 3 и большими 4 консолями, последние из них имеют по всему размаху предкрылки 5, закрылки 6. Струйная система подает от компрессоров КГтД сверхзвуковой воздушный поток к реактивным нижнему 7 или верхнему 8 КС, установленным по продольной оси ПФГ 1 в кормовом обтекателе 9 с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель (на фиг. 1 не показаны). Концевые части 10 меньших ромбовидных консолей 3 выполнены складывающимися вниз в полете и на стоянке (см. рис. 1в). ПФГ 1 имеет цельно-поворотные кили 11, колесное убирающееся трехопорное шасси и боковые воздухозаборники с S-образными воздуховодами, экранирующими ОТВ (на фиг. 1 не показаны). Каждый КГтД с ОТВ и ССТ имеет ВУВТ круглого реактивного сопла 12. Внутри больших трапециевидных консолей 4 ДНК 3-4 с двусторонней симметрией смонтированы два ККО 13 с левым 14 и правым 15 поперечными ПВ, равноудаленными в плане от центра масс. Каждый ККО 13 снабжен поперечными сверху жалюзи-створками 16 и снизу управляемыми жалюзи-рулями 17, организующими после закрытия соответствующие поверхности ДНК 3-4. Два КГтД в комбинированной СУ содержат реактивные круглые сопла 12 с ВУВТ, имеют отбор воздуха от компрессоров КГтД для реактивных КС 7-8 и передний вывод вала для отбора мощности и ее передачи на Т-образный в плане редуктор с продольным и поперечным валами (на фиг. 1 не показаны), передающими крутящий момент на ОТВ и Т-образный в плане главный редуктор, связанный через муфту сцепления, угловой и Т-образный редукторы и его поперечные валы с угловыми редукторами ПВ 14-15, перераспределяет от взлетной мощности СУ по 50% между ПВ 14-15 или 22% и 30% между двумя ОТВ в КО соответственно при выполнении ВВП, зависания или горизонтального полета.
Управление палубным ОПКР обеспечивается из двухместной без застекленной поверхности кабины 18, а целеуказание - его радаром с АФАР и ОЭД 19 (см. фиг. 1в). При полете как реактивного самолета подъемная сила создается соответственно ДНК 3-4 с зафиксированными меньшими или большими консолями ДНК по оси симметрии при закрытых жалюзи-створках 16 с жалюзи-рулями 17 в ККО 13 (см. фиг. 1б), маршевая реактивная тяга - системой ПРС-R2 через реактивные сопла 12 с ВУВТ в КГтД, смонтированных в кормовых гондолах ПФГ 1, на режиме перехода - ДНК 3-4 с ПВ 14-15. После создания подъемной тяги ПВ 14-15 обеспечиваются режимы ВВП и зависания или КВП при создании реактивными соплами 12 с ВУВТ в КГтД требуемой маршевой тяги для поступательного полета (см. рис. 1а). При выполнении ВВП и зависания для изменения балансировки по крену или курсу поперечные нижние жалюзи-рули 17 в каждом ККО 13 выполнены с возможностью их дифференциального поочередного или одновременного отклонения на углы вперед по полету -40° и назад +40° соответственно, но и тангажу - поочередной работой нижнего 7 или верхнего 8 КС на кормовом обтекателе 9 (см. рис. 1в). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях 250 км/ч и осуществляется отклонение назад створок 16 жалюзи-рулей 17 и перераспределение мощности с ПВ 14-15 на ОТВ КГтД. По мере разгона с ростом подъемной силы ДНК 3-4 подъемная сила ПВ 14-15 уменьшается. При достижении скоростей полета 280 км/ч и для перехода на самолетный режим полета ПВ 14-15 останавливаются, фиксируются при синхронно закрытых назад по полету поперечных жалюзи-створках 16 и жалюзи-рулей 17 их ККО 13 (см. фиг. 1б). При создании реактивной тяги соплами 12 и фиксации поперечной средней линии больших консолей 4 ДНК 3-4 по оси симметрии и правой законцовки в переднем обтекателе 20 производится транс- или сверхзвуковой полет ОПКР, при котором изменение балансировки по тангажу, крену и курсу обеспечивается соответствующим отклонением реактивных сопел 12 с ВУВТ каждого КГтД и килей 11.
Таким образом, стратегическая АТАС с ОПКР и ДПКР с ДНК и двумя КГтД, имеющими для создания вертикальной тяги ПВ в ККО и/или горизонтальной тяги ОТВ в КО в ПФГ с работающими или зафиксированными ПВ, представляет собой реактивный конвертоплан с системой холодного потока воздуха от ПВ в МПНС-Х2/Х4 при ВВП, зависании и горячего выхлопа реактивной струи в ПРС-R2 при горизонтальном полете. Поворотное ДНК с двусторонней симметрией при фиксации трапециевидных консолей ДНК по оси симметрии увеличивает показатели аэродинамических и структурных преимуществ в конфигурации сверхзвукового самолета с ромбовидным крылом и отклоненными его концевыми частями вниз. Последнее позволит повысить на 30% аэродинамическое качество, экономию топлива - на 20% или дальность полета - на 29% при выполнения трансзвукового полета в конфигурации самолета со скоростью 880…1000 км/ч, но и на сверхзвуковых скоростях уменьшить лобовое сопротивление на 12…20%, волновое сопротивление - на 26% и достичь с безфорсажной маршевой тяговооруженностью Кмт=0,54/0,68 комбинированной СУ скорость 1275/1488 км/ч. Кроме того, круглые сопла КГтД с ВУВТ для управления горизонтальным полетом устраняют традиционную необходимость в сложных механических подвижных частях их несущих поверхностей, используемых для отклонения рулей направления, элеронов и элевонов управления. Система радиоэлектронной борьбы и противодействия представляет собой интегрированный набор аппаратного и программного обеспечения ОПКР и ДПКР, оптимизированного с высоким уровнем обнаружения и самозащиты, обеспечивающим идентифицировать, найти и противостоять угрозам с функциями: радиолокационное предупреждение; излучатель геолокации; местоположение излучателя на нескольких кораблях-целях, включая широкий частотный охват, быстрое время реакции и меры противодействия для самозащиты.
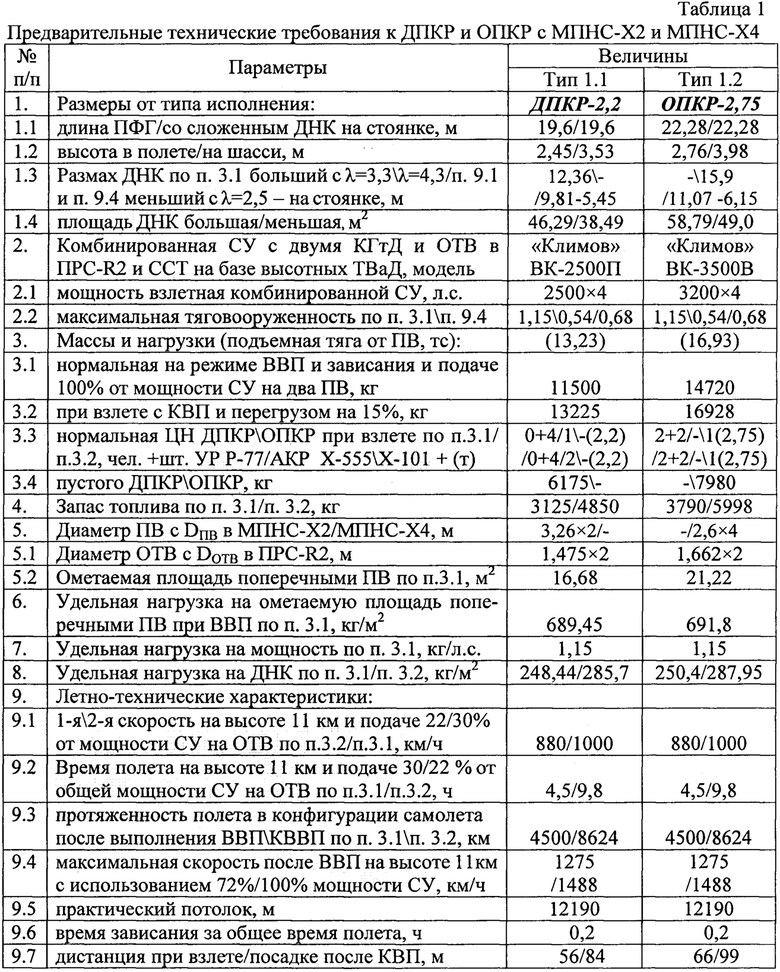
Авиационная группа в составе АТАС, включающая тяжеловооруженные ОПКР и ДПКР, используемые с вертолетной площадки АНЛ, несущие в бомбоотсеках их ПФГ (см. табл. 1) ДПКР-2,2/ОПКР-2,75 по 1/1 АКР типа Х-555/Х-101. Головной ОПКР, который полностью оцифрован с использованием новейших технологий, включая и совместное использование авиагруппы БЛА, так называемое manned and unmanned teaming (MUM-T), которое позволяет пилотам головного ОПКР контролировать траекторию полета группы ведомых ДПКР и их боевые нагрузки. Четвертый уровень MUM-T позволяет пилотам ОПКР не только получать реальные сенсорные изображения с авиагруппы ведомых ДПКР и управлять оружейными нагрузками, их навигацией и глобальным позиционированием с созданием буферной авиазоны между ПВО-цели и ОПКР, используя ВВП/КВВП, увеличивают дальность полета АКР типа Х-102 до 7750/9812 км, которая сопоставима с дальностью действия МБР типа «Булава-30», образуя после запуска ряда АКР типа Х-102 автономные рои с буксируемыми ложными их целями, повышающими поражающую возможность и боевую устойчивость ударного АНЛ-вертолетоносца, освоенного на базе атомного ледокола «Лидер» проекта 10510 с передовыми адаптируемыми возможностями, позволяющими использовать большое водоизмещение 71380 тонн для увеличения ледопроходимости до 4,3 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННАЯ КОРАБЕЛЬНО-АРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2753894C1 |
| СИСТЕМА КОРАБЕЛЬНАЯ АВИАЦИОННО-РАКЕТНАЯ ПРОТИВОСПУТНИКОВАЯ | 2020 |
|
RU2748043C1 |
| КОМПЛЕКС АВИАЦИОННЫЙ РАЗВЕДЫВАТЕЛЬНО - ПОРАЖАЮЩИЙ | 2019 |
|
RU2725563C1 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
| УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2020 |
|
RU2743262C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
| СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНО-ПОРАЖАЮЩАЯ | 2020 |
|
RU2753779C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
Изобретение относится к области военной техники. Стратегическая авиационная трансарктическая система содержит опционально и дистанционно пилотируемые конвертопланы-ракетоносцы, имеющие двунаправленное крыло с двусторонней симметрией в двух перпендикулярных плоскостях. Крыло смонтировано на поворотном шарнире подкрыльного фюзеляжа-гондолы, в котором установлены комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими два поперечных подъемных вентилятора (ПВ), и/или в кольцевых обтекателях два турбовентилятора, создающих при вертикальном и коротком взлете/посадке (ВВП и КВП) подъемную и/или пропульсивно-реактивную тягу с работающими или зафиксированными ПВ при автоматически открытых/закрытых верхних продольных створках и нижних поперечных жалюзи-рулей крыльевых кольцевых обтекателей в конфигурации реактивных самолетов при выполнении ВВП/КВП и горизонтального полета. Конвертопланы-ракетоносцы, используемые с авианесущего ледокола, несут управляемые ракеты. Обеспечивается повышение вероятности поражения надводной или наземной цели, расположенной на большой дальности. 3 з.п. ф-лы, 1 ил., 1 табл.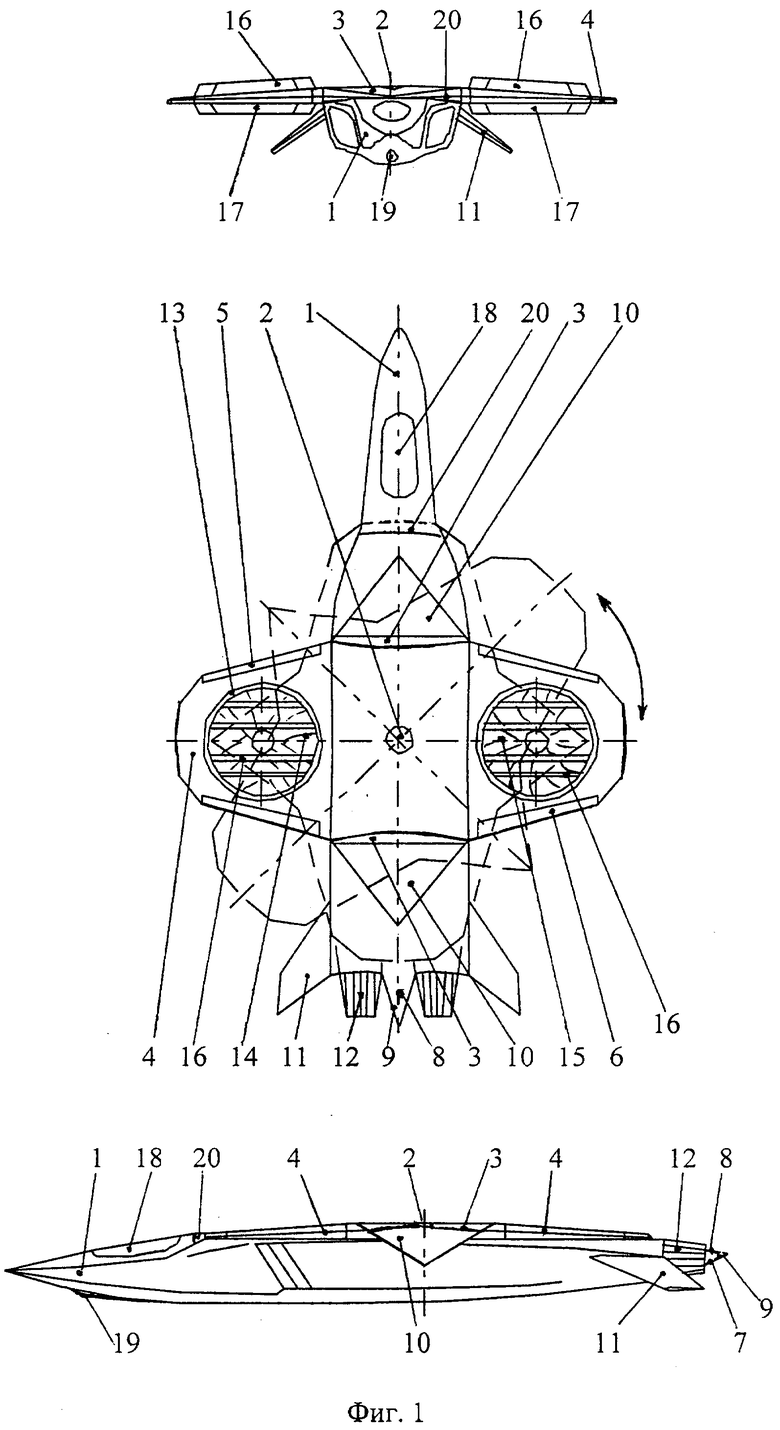
1. Стратегическая авиационная трансарктическая система с беспилотным летательным аппаратом (БЛА), имеющим фюзеляж, пусковое устройство (ПУ) с управляемой ракетой (УР), крыло с органами его управления, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта авианесущего ледокола (АНЛ), отличающаяся тем, что она имеет группу аппаратов вертикального взлета и посадки (ВВП) корабельного базирования, включающую более чем один опционально пилотируемый конвертоплан-ракетоносец (ОПКР) с более чем одним дистанционно пилотируемым конвертопланом-ракетоносцем (ДПКР), используемую более чем с одной вертолетной площадки атомного АНЛ, причем каждый ДПКР и ОПКР выполнен по гибридной компоновке по меньшей мере с одним двунаправленным крылом (ДНК), имеющим двустороннюю симметрию в двух перпендикулярных плоскостях и в любом из двух положений на 90° равно- или разновеликие по размаху трапециевидные и ромбовидные консоли соответственно с округлыми и треугольными их законцовками, интегрированным с подкрыльным фюзеляжем-гондолой (ПФГ) и его шарниром, обеспечивающим механизмом следящего привода от исходного по оси симметрии положения в плане ромбовидных консолей ДНК их поворот в горизонтальной плоскости на угол 90° против или обратно по часовой стрелки так, что трапециевидные/ромбовидные и ромбовидные/трапециевидные консоли ДНК устанавливаются в плане соответственно по оси/перпендикулярно к оси симметрии, фиксируются в последнем положении, например, трапециевидные большие/ромбовидные меньшие консоли ДНК с соответствующим их удлинением λ=3,3…4,3λ/=2,5, но и содержит на трапециевидных консолях ДНК многовентиляторную поперечную несущую систему (МПНС), используемую при ее установке с этими консолями перпендикулярно к плоскости симметрии на переходных и разгонных режимах полета, выполнении ВВП, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), но и включающую, по меньшей мере, два подъемных вентилятора (ПВ), равноудаленных в плане от центра масс, смонтированных в крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные как верхние жалюзи-створки, так и нижние жалюзи-рули, обеспечивающие свободный доступ воздуха в соответствующие ККО и выход из них воздушного потока, не обдувающего ПФГ, и образующие после их закрывания назад по полету соответствующие поверхности ДНК, но и снабжен по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), смонтированными в кормовой части ПФГ, оснащены боковыми воздухозаборниками и круглыми соплами со всеракурсным управлением вектором тяги (ВУВТ) и выполнены в виде двухконтурных реактивных двигателей, имеющих однорядный турбовентилятор (ОТВ) в кольцевом обтекателе (КО) и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие ПВ в ККО и/или ОТВ в КО, создающие в пропульсивно-реактивной системе (ПРС) синхронную реактивную тягу при выполнении ВВП, КВП и КВВП или горизонтальном поступательном полете, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с КГтД, приводящими, например, в МПНС-Х2 пару ПВ и/или два ОТВ в IIPC-R2, создающие при этом подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными ПВ при автоматически открытых/закрытых верхних створках и нижних жалюзи-рулей их ККО в конфигурации реактивных сверх- или трансзвукового самолета соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом в системе трансмиссии каждый ее КГтД размещен в кормовой гондоле ПФГ, в которой между ОТВ и ССТ смонтирован соосно с двумя последними Т-образный в плане редуктор, имеющий продольные по его оси входные валы, например, от двух ССТ, но и продольный и поперечный выходные валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй синхронизирующий вал передает крутящий момент на Т-образный в плане главный редуктор, выходной вал которого через муфту сцепления вращательно связан с угловым редуктором, вертикальная колонка выходного вала которого, являясь жесткой осью поворотного шарнира ДНК, размещена соосно с последним, имеет вал, который вращательно связан через муфту сцепления с Т-образным при виде сзади редуктором, передающим его выходными валами, проложенными внутри трапециевидных консолей ДНК и ребер жесткости ККО, равновеликую мощность на угловые редукторы ПВ.
2. Система по п. 1, отличающаяся тем, что в упомянутых ОПКР и ДПКР для уменьшения в 1,8…2,3 раза стояночной их площади от взлетной концевые части ромбовидных консолей ДНК выполнены складывающимися вниз при упомянутой по оси симметрии фиксации трапециевидных консолей ДНК, а их система управления циркуляцией воздушного потока, обеспечивающая направление от компрессора каждого КГтД сверхзвуковых воздушных потоков, которые на режимах ВВП и зависания для изменения балансировки по тангажу подаются к струйным рулям по продольным воздуховодам к их клапанам и выдуваются поочередно из реактивных верхнего или нижнего кормового сопла (КС) при открытой соответствующей автоматической створке, образующей при ее закрытии соответствующую поверхность кормового обтекателя, а на режимах их ВВП и зависания для выполнения подъема и изменения балансировки как по крену, так и курсу упомянутые жалюзи-рули, например, в левом и правом их ККО, которые установлены на поперечной средней линии упомянутых трапециевидных консолей ДНК, проходящей в плане через центр масс, выполнены с возможностью дифференциального отклонения от центра ККО на углы вперед по полету -40° и назад +40° как поочередно в одном из ККО с одной стороны передних и задних их жалюзи-рулей, так и одновременно в паре ККО с двух сторон передних с задними жалюзи-рулями соответственно, а в полетной их конфигурации реактивного самолета изменение балансировки по тангажу, курсу и крену создается соответственно синфазным и дифференциальным отклонением в двух КГтД их реактивных сопел с упомянутыми ВУВТ обоих вертикально вверх-вниз, обоих горизонтально влево-вправо и вертикально одного вверх, а другого вниз, но и повышение путевой устойчивости при скорости их полета М=0,7…М=1,4 концевые части их ромбовидных консолей, смонтированных с ДНК по правилу площадей, отклоняются вниз на угол 30°, причем на режимах ВВП и зависания ОПКР и ДПКР при удельной нагрузке на мощность их комбинированной СУ, составляющей ρN=1,15 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности, например, в МПНС-Х2, составляющей с учетом потерь от обдува ребер жесткости ККО ρВТ=1,15, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ПВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ПВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в МПНС-Х2, составляющей ρВТ=1,07, обеспечат режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их ПФГ, и дисков вращения их ПВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован, чтобы: определить относительную позицию между их ПФГ с их колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПФГ и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, при этом каждый ОПКР и ДПКР, выполненный соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПКР и возможностью опционального его управления пилотами из кабины ПФГ, а нижние бомбоотсеки их ПФГ имеют внутреннее вооружение с автоматическими створками и их упомянутыми ПУ с закрепленными на них УР воздух-воздух и авиационными крылатыми ракетами (АКР), обеспечивающими соответственно борьбу с воздушной и наземной, надводной целью, а их комплекс вооружения имеет авиационную пушку, установленную в обтекателе сверху носовой части ПФГ, поражающую дозвуковые ударные БЛА и АКР, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, причем тяжеловооруженные ДПКР и ОПКР, несущие в конфигурации реактивного самолета в бомбоотсеках их ПФГ соответственно АКР типа Х-555 и X101 для создания буферной безопасной авиазоны между головным ОПКР и ПВО цели, увеличивающей дальность действия до 4750/7750 км соответственно стратегических АКР типа Х-555/Х-101, образующих после их запуска автономные рои АКР с буксируемыми ложными их целями, а их ПФГ, имеющий от пирамидальной носовой его части скошенные по всей его длине их боковые стороны, образующие с упомянутыми воздухозаборниками при виде спереди пяти- или шестигранное поперечное его сечение, уменьшающее эффективную площадь рассеивания, а их ПФГ на конце хвостовых балок имеет либо цельно-поворотные кили, отклоненные вверх или вниз и наружу от плоскости симметрии под углом 47° к горизонтали, либо стреловидный стабилизатор с концевыми киль-шайбами, образующими при виде спереди U-образное оперение, а их ПФГ между сопел КГтД снабжен вынесенным вдоль продольной его оси и от конца кормовым обтекателем с отсеком, снабженным на его конце выдвижной буксируемой на тросе ложной целью, при этом электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается внизу носовой части ПФГ головного ОПКР и с радаром последнего обеспечивает на больших, безопасных для ОПКР расстояниях целеуказание и управление оружейными нагрузками ОПКР и ДПКР с наведением на цель их АКР класса воздух-земля и их УР воздух-воздух, а управление ДПКР обеспечивается вторым пилотом ОПКР, используя маловысотный профиль полета и систему самообороны ДПКР-станцию активных электронных помех, причем упомянутая БСУ головного ОПКР, выполненного с электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления пилотом и/или их комбинации, снабжена возможностью опционального его управления пилотами из кабины, смонтированной в их ПФГ, имеющих катапультируемые в верхнюю полусферу кресла, срабатывающие автоматически при выполнении ВВП и зависания, но и его использования в составе авиагруппы в качестве головного с упомянутыми более чем двумя ДПКР, более чем один из которых, являясь ведомым, автоматически повторяет его системой автопилота в следящем полете маневры головного ОПКР, а другой управляется вторым пилотом с головного ОПКР, а затем наоборот, причем при отсутствии вмешательства пилота система автопилота выполняет управление полетом ведомого ДПКР в соответствии с командами текущего состояния, повторяющими профиль полета и изменение маршрута головного ОПКР, при этом в случае возникновения внештатной ситуации, то для устранения непредвиденных проблем с безопасностью выполнения следящего полета пилот принимает на себя непосредственное управление ведомым ДПКР, отменяя команды текущего состояния, выдаваемые автопилотом при автономной работе следящего полета, причем система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПКР, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПКР, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован, чтобы: определить относительную позицию между ведомым ДПКР и головным ОПКР; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПКР, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПКР относительно ОПКР, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, при этом каждый сенсорный компьютер предыдущего и последующего из ведомых ДПКР, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного ОПКР и предыдущего ДПКР; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета каждого ДПКР в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному стратегическому роению.
3. Система по п. 2, отличающаяся тем, что в упомянутых ОПКР и ДПКР система управления формированием их относительной позиции в полете с одним или несколькими датчиками включает в себя один или несколько инфракрасных (ИК) датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом приемапередачи данных, расположенным на головном ОПКР для получения глобальных данных о местоположении от ведомого ДПКР, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем дополнительный компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать сбор данных от каждого видеодатчика, а также обеспечивать преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПКР, передаваемого на ведомый ДПКР, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПКР, обеспечивающей упомянутый следящий полет ведомого ДПКР, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет ОПКР небезопасен для относительного его положения от ведомого ДПКР, но и отключающего формирование упомянутого следящего полета ведомым ДПКР через компьютер управления полетом.
4. Система по любому из пп. 1, 2, отличающаяся тем, что в упомянутых ОПСВ и ДПСВ их ДНК с трапециевидными консолями, выполненными с относительной толщиной их профиля  и сужением ηднк=0,53, оснащенными по всему размаху предкрылками и закрылками, имеет упомянутые ромбовидные консоли с относительной толщиной их профиля
и сужением ηднк=0,53, оснащенными по всему размаху предкрылками и закрылками, имеет упомянутые ромбовидные консоли с относительной толщиной их профиля  , а для трансзвукового режима полета с промежуточной под углом 45° к оси симметрии фиксацией их консолей ДНК, преобразуя последнее в двунаправленное крыло асимметрично изменяемой стреловидности, которое при маршевой тяговоуроженности первого уровня - 0,246 или второго - 0,3, используя соответственно 22% или 30% мощность их СУ, обеспечивает на высоте 11 км скорость 0,829 Маха (М) или М=0,942, а для сверхзвукового режима полета с упомянутой фиксацией их трапециевидных консолей ДНК так, что в С-образном при виде сбоку переднем обтекателе ПФГ, размещенном за кабиной в верхней его утонченности, фиксируется законцовка правой его консоли, используя при этом 72% или 100% мощности их СУ, достигается при маршевой тяговоуроженности третьего/четвертого уровня Кмт=0,54/0,68 соответственно сверхзвуковая скорость М=1,2/М=1,4, а планер ОПКР, не имея застекленной поверхности кабины, содержащей средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом изображение проходит цифровую корректировку и для управления в режиме реального времени отображается модулем распределения видео на дисплеях кабины или видны на нашлемных дисплеях пилотов, которые подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях соответственно.
, а для трансзвукового режима полета с промежуточной под углом 45° к оси симметрии фиксацией их консолей ДНК, преобразуя последнее в двунаправленное крыло асимметрично изменяемой стреловидности, которое при маршевой тяговоуроженности первого уровня - 0,246 или второго - 0,3, используя соответственно 22% или 30% мощность их СУ, обеспечивает на высоте 11 км скорость 0,829 Маха (М) или М=0,942, а для сверхзвукового режима полета с упомянутой фиксацией их трапециевидных консолей ДНК так, что в С-образном при виде сбоку переднем обтекателе ПФГ, размещенном за кабиной в верхней его утонченности, фиксируется законцовка правой его консоли, используя при этом 72% или 100% мощности их СУ, достигается при маршевой тяговоуроженности третьего/четвертого уровня Кмт=0,54/0,68 соответственно сверхзвуковая скорость М=1,2/М=1,4, а планер ОПКР, не имея застекленной поверхности кабины, содержащей средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом изображение проходит цифровую корректировку и для управления в режиме реального времени отображается модулем распределения видео на дисплеях кабины или видны на нашлемных дисплеях пилотов, которые подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях соответственно.
| ПАЛУБНЫЙ АВИАЦИОННЫЙ БЕСПИЛОТНЫЙ ПРОТИВОЛОДОЧНЫЙ КОМПЛЕКС (ПАБПК) | 2017 |
|
RU2684160C1 |
| Самолет вертикального взлета и посадки, выполненный по схеме "утка" | 2016 |
|
RU2623370C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| US 3335977 A1, 15.08.1967 | |||
| US 6561456 B1, 13.05.2003. | |||

