Изобретение относится к средствам военной техники и может быть применено в конструкции подводных авианосцев-полукатамаранов (ПАГЖ) с одним и двумя прочными корпусами трех подлодок, связанных, образуя в кормовой части межкорпусной туннель, между собой и сверху прочными поперечной структурой и развитым корпусом палубы, используемых с надводного положения автономно или совместно, по меньшей мере, с двумя атомными ПАПК, состыкованными вдоль их продольных осей в единую систему, снабженных палубными опционально и дистанционно пилотируемыми самолетами-вертолетами, представляющими собой в плане летающее ромбовидное крыло со складывающимися внешними его секциями и двумя крыльевыми мотогондолами, имеющими комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими два поперечных или продольных несущих винта (НВ) в кольцевых обтекателях центроплана крыла и/или в кольцевых обтекателях вентиляторы, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) подъемную и/или пропульсивно-реактивную тягу с работающими или зафиксированными НВ при автоматически открытых/закрытых верхних продольных створках и нижних поперечных или продольных жалюзи-рулей крыльевых кольцевых обтекателей в конфигурации палубных вертолета/самолета, имеющих в бомбоотсеках управляемые ракеты и возможность выполнения ВВП/КВП с верхней палубы одного корпуса палубы ПАПК/с двух корпусов палуб ПАПК, состыкованных в систему.
Известен [см. https://navy-chf.livejoumal.com/1433004.html] проект британских компаний "BAE Systems" и "Vickers Shipbuilding and Engineering" подводного авианесущего комплекса (ПАК), включающего подлодку типа "Vanguard" с более чем одним самолетом вертикального взлета-посадки (СВВП) и систему "Skyhook", размещенную по бортам кормовых обтекателей подлодки, имеющую два манипулятора с захватами как для захвата палубного СВВП, подлетевшего и зависшего под захватами манипулятора, так и переноса на палубу с последующим его перемещением в ее ангар.
Признаки, совпадающие - наличие подводного авианосца с палубной ударной авиационной системой, включающей манипулятор с захватами для переноса реактивного СВВП на палубу подлодки с последующим его перемещением в ангар на транспортно-фиксирующем устройстве и из ангара обратно. Проект системы "Skyhook" выглядел следующим образом: на подлодке по ее бортам в кормовых обтекателях размещались два механических манипулятора с захватами, садившийся СВВП "Харриер" подлетал к подлодке, переводил сопла в вертикальное положение и плавно зависал рядом с бортом, после чего манипулятор с несколькими захватами подцеплял СВВП за специальные упоры на фюзеляже. Датчики синхронизировали движения манипулятора с работой его захвата и СВВП. После захвата СВВП манипулятор автоматически переносил на палубу подлодки и укладывал его на транспортное устройство для перемещения в ангар подлодки и обратно заправленного и заряженного СВВП.
Причины, препятствующие поставленной задаче: первая - это то, что наличие на верхней части фюзеляжа вертикального оперения затрудняет после перевода сопел в вертикальное положение выполнение зависания СВВП рядом с бортом подлодки и под захватами манипулятора, а в случае отказа работы датчиков синхронизации их движения и его перелета вперед от захватов манипулятора, что не исключает последующего их контакта с возможным разрушением самого вертикального оперения и неизбежного крушения СВВП. Вторая - это то, что реактивный СВВП с двумя парами поворотных сопел по его бортам при выполнении его зависания рядом с бортом подлодки и под захватами манипулятора необходимые изменения балансировки по тангажу, крену и рысканью осуществляются синфазным и дифференциальным соответствующим их отклонением в двух вертикальных продольных плоскостях, что неизбежно усложняет процесс стыковки с захватами манипулятора, особенно, при кренах подлодки до 25° и с расположением манипуляторов с внешних ее бортов.
Известен беспилотный ударный самолет мод. "Taranis" британской компании "BAE Systems" [см. https://en.wikipedia.org/wiki/BAE_Systems_Taranis] выполнен по схеме летающее крыло с внутренними отсеками вооружения и без вертикального оперения, имеет один турбореактивный двухконтурный двигатель (ТРДД) с воздухозаборником, размещенным на его верхней части, и трехопорное убирающееся колесное шасси. Для трансзвукового полета "Taranis" его ТРДД Rolls-Royce Adour имеет реактивную тягу 4485 кгс, что обеспечивает при тяговооруженности 0,64 на высоте полета 11,5 км скорость 1060 км/ч. Взаимодействие аэродинамических, структурных и управляющих реакций - является ахиллесовой пятой "Taranis" в схеме летающее крыло. Для обеспечения контроля его управляемости, особенно, в направлении всех трех осей управления - тангаж, крен и рыскание, имеются шесть интегрированных поверхностей управления полетом на задней его кромке. Эффект интегрированных поверхностей меняется в зависимости от оси управления, особенно, при изменении балансировки по рысканию, которое зависит от угла относительного встречного потока при соответствующем отклонении внешних интерцепторов, вызывающих постоянные управляющие реакции компьютера управления, что в отсутствии всеракурсного отклоняемого сопла ТРДД усложняет управляемость и не обеспечивает ее стабильность. Все это также ограничивает возможность дальнейшего увеличения скорости и дальности полета, улучшения весовой отдачи и повышения целевой нагрузки (ЦН).
Наиболее близким к предлагаемому изобретению является подводная лодка (ПЛ) [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] с палубным авиационным комплексом (ПАК) "Icara" (Англия), содержащим беспилотный летательный аппарат (БЛА), имеющий фюзеляж с отделяемой управляемой ракетой, несущее крыло, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта (КП) ПЛ.
Признаки, совпадающие - габариты БЛА без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м. Боевая часть: самонаводящаяся противолодочная малогабаритная торпеда (МГТ) Мк.44. Летные характеристики: максимальная и минимальная высота полета соответственно 300 м и 15-20 м. Ввиду значительного веса БЛА с торпедой Mk.44 составляющего 1480 кг (при массе 13% целевой нагрузки -торпеды 196 кг, ее длине 2,57 м и диаметре 324 мм) и малых дальности 24 км и скорости полета 140-240 м/с, а боевой части (торпеды - 30 узлов и дальность хода 5 км).
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели сбрасываемую торпеду. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем передавал их через радиокомандную систему управления на БЛА в полете. По прибытии БЛА в район нахождения ПЛ-цели торпеда (самонаводящаяся МГТ Мк.44), полуутопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск ПЛ-цели. После чего БЛА продолжает полет с работающей СУ, уводя ее от места приводнения самонаводящейся МГТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанной выше известной ПЛ с ПАК модели "Icara" (Англия) увеличения боевой нагрузки и весовой отдачи, повышения скорости и дальности полета, увеличения вероятности поражения подводной и надводной цели, расположенной на большой дальности, но и возможности ее атаки после продолжительного полета в режиме зависания, возврата на вертолетную площадку палубы подводного авианосца-полукатамарана для повторного использования.
Отличительными признаками предлагаемого изобретения от указанной выше известной ПЛ с ПАК "Icara", наиболее близкой к нему, являются наличие того, что авианесущая ПЛ (АПЛ) с авиагруппой аппаратов вертикального взлета и посадки в ПАК, включающей более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одной парой дистанционно пилотируемых самолетов-вертолетов (ДПСВ), которые используются более чем с одной вертолетной площадки АПЛ, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения и по интегральной компоновке с плавным сопряжением фюзеляжа и крыла с наплывами, образующими единую несущую конструкцию - летающее ромбовидное крыло (ЛРК) в плане и содержит в двухвинтовой поперечной или продольной схеме (ДПоС или ДПрС) тянущие или толкающие несущие винты (НВ), размещенные в центроплане ЛРК на верхних или нижних равновеликих пилонах поперечного или поперечно-продольного профилированного ребра жесткости (ПРЖ), смонтированного с его размахом (Lпрж) между крыльевых мотогондол (КМГ) по их осям, установленных параллельно оси симметрии, вынесенных от передней и задней кромок ЛРК, имеющие равновеликие диаметры (Dнв), определяемые из соотношения: Dнв=(0,59…0,62)×Lпрж, м или Dнв=(0,9…0,93)×Lпрж, м, равноудаленные от центра масс с перекрытием равным a=1,33 или а=1,4 для трех- или четырехлопастных НВ, образующим форму в плане цифру восемь двух близко расположенных крыльевых кольцевых обтекателей (ККО), применяемые в ДПоС-Х2 или ДПрС-Х2 только при вертикальном и коротком взлете и посадке (ВВП и КВП), но и на переходных и барражирующих режимах полета с автоматически открываемыми/закрываемыми верхними продольными парами круглых или трапециевидных створок и нижними поперечными или продольными жалюзи-рулями, обеспечивающими свободный доступ воздуха в их ККО и выхода воздушного потока из них, образующими после их закрывания соответствующие поверхности ЛРК, интегрированного с КМГ, смонтированными на консолях ЛРК, оснащенными воздухозаборниками с регулируемым коническим центральным телом их комбинированных газотурбинных двигателей (КГтД), имеющих круглые сопла со всеракурсным управлением вектора тяги (ВУВТ), выполненных в виде двухконтурных двигателей, имеющих внешний и внутренний контуры соответственно кольцевой обтекатель (КО) с выносным однорядным вентилятором (ВОВ) и, по меньшей мере, одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ и/или каждый ВОВ, имеющий лопатки с большой круткой, работающий по тянущей схеме, создает при горизонтальном полете как реактивных винтокрыла/автожира или самолета в пропульсивно-реактивной системе (ПРС) синхронную маршевую реактивную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с вертолета или винтокрыла с двумя КГтД, приводящими два НВ или два НВ с двумя ВОВ, создающими подъемную тягу или подъемную с маршевой в ПРС-R2 тяги в полетные конфигурации реактивных самолета или автожира соответственно с зафиксированными или авторотирующими их НВ при автоматически закрытых или открытых верхних створках и нижних жалюзи-рулей их ККО, но и обратно, причем на режимах ВВП и зависания для изменения балансировки по тангажу и курсу, но и крену или крену и курсу, но и тангажу, обеспечивается соответственно синфазным и дифференциальным отклонением поперечных или продольных нижних жалюзи-рулей в каждом ККО на углы -45°/+45° вперед-назад или влево-вправо, но и изменением на большие и меньшие углы установки левого-правого НВ или переднего-заднего НВ с созданием разновеликой подъемной их тяги.
Кроме того, в упомянутых ОПСВ и ДПСВ снаружи их КМГ внешние стреловидные или треугольные секции адаптивного ЛРК, синхронно отклоняющиеся от горизонтали вверх на угол 12°/25° и 65°/150°, что соответственно повышает путевую устойчивость при скорости полета от 0,5 Маха (М) до М=0,828/М=0,93 и уменьшает балансировочное сопротивление в сверхзвуковом полете/стояночную площадь, снабжены отклоненными вверх развитыми треугольными в плане законцовками, устанавливаемыми вертикально при повороте внешних секций на угол 65°, а в системе трансмиссии каждый их КГтД в упомянутой КМГ, в которой между ВОВ и ССТ соосно с двумя последними смонтирован промежуточный редуктор, имеющий продольные как входные валы, например, от двух ССТ, так и выходные соосные внешний и внутренний валы, передающие крутящий момент через муфты сцепления соответственно на ВОВ и посредством углового в плане редуктора, размещенного спереди ВОВ, и его поперечного синхронизирующего вала, проложенного в носке ПРЖ, предающего в ДПоС-Х2 на два консольных Т-образных редуктора или ДПрС-Х2 один крестообразный в плане редуктор с продольными валами и угловыми редукторами равновеликую мощность соответственно на левый/правый или передний/задний НВ, выполненные с жестким креплением лопастей и без автомата их перекоса, вращающиеся при виде сверху в противоположные стороны соответственно против и по часовой стрелки, а на взлетно-посадочных режимах полета при выполнении КВП внутренние и внешние секции их ЛРК по обе стороны от односторонней КМГ и внутри задних их кромок снабжены равновеликими по длине крыльевыми полостями, имеющими на суммарной их длине, составляющей 1/5…1/4 от размаха ЛРК, систему управления циркуляцией воздушного потока, обеспечивающую направление от компрессора одностороннего КГтД сверхзвуковых воздушных потоков, которые, направляясь по соответствующим воздуховодам с их клапанами к каждой крыльевой полости, выдуваются из полости через реактивные верхние щелевые сопла, размещенные над округлой задней кромкой ЛРК обтекаемой формы несущего профиля, увеличивающие, используя эффект Коанда и выполняя роль реактивных закрылков, подъемную силу ЛРК на режимах КВП, исключающие механическое отклонение и подвижные их зазоры, уменьшая эффективную площадь рассеивания, а в полетной их конфигурации реактивного самолета изменение балансировки по тангажу, курсу и крену создается соответственно синфазным и дифференциальным одновременным отклонением в двух КГтД их реактивных сопел с упомянутыми ВУВТ обоих вертикально вверх-вниз, обоих горизонтально влево-вправо и вертикально одного вверх, а другого вниз, причем на режимах ВВП и зависания ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=l,875 кг/л.с, каждая их ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ДПоС-Х2/ДПрС-Х2, составляющей ρВТ=1,23, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод их НВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и перераспределением оставшейся мощности между НВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в ДПоС-Х2/ДПрС-Х2, составляющей ρВТ=1,18 или ρВТ=1,1, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их НВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, а их ЛРК, выполненное с передними и задними развитыми наплывами, образующими переменную и пилообразную стреловидность по передней и задней кромкам, имеет профилированную кормовую часть с V-образной в плане задней кромкой, снабженную обтекателем с задним и нижним отсеками, оснащенными выдвижной штангой магнитометра и опускаемой лебедкой на тросе под воду антенной гидроакустической станции, которые используются при барражирующем полете и зависании, при этом несущий фюзеляж ДПСВ и ОПСВ выполнен соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПСВ, имеет скошенные боковые стороны по всей его длине, уменьшая эффективную площадь рассеивания, образуя при виде спереди ромбовидное поперечное сечение, большая часть которого располагается над или под средней линией ЛРК, имеющего в интегрированных с фюзеляжем корневых его наплывах несущие части пассажирского или грузового салона, а их КМГ имеют отсеки внутреннего вооружения с автоматическими их пилообразными створками и их ПУ с закрепленными на них авиационными противолодочными или противокорабельными ракетами (АПР или ПКР) и УР воздух-воздух, а их комплекс вооружения имеет авиационные пушку или крупнокалиберный многоствольный пулемет, установленный в обтекателе носовой части фюзеляжа и поражающие дозвуковые ударные БЛА и крылатые ракеты, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, причем при противолодочной обороне ОПСВ и ДПСВ, использующие полетную конфигурацию крылатого автлжира, применяется выдвижной магнитометр ОПСВ в процессе наведения одной или двух АПР залпа на цель с автоматическим определением значения вводимого адаптивного угла упреждения, который при сближении с целью корректируется, при этом введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус подводной лодки-цели, причем при противокорабельной обороне ОПСВ и ДПСВ, которые в конфигурации реактивного самолета в их бомбоотсеках на ПУ несут ПКР Х-35У или Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО надводного корабля-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом с головного ОПСВ его радаром типа Н036 обеспечивается целеуказание [см. https://vpk.name/library/f/h036.html], а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем упомянутая БСУ ОПСВ, выполненного с электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления пилотом и/или их комбинации, снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиагруппы в качестве головного с более чем, например, двумя ДПСВ, более чем один из которых, являясь ведомым, автоматически повторяет его системой автопилота в следящем полете маневры головного ОПСВ, а другой - управляется вторым пилотом-оператором с ОПСВ, а затем наоборот, причем при отсутствии вмешательства пилота-оператора система автопилота ведомого ДПСВ выполняет управление полетом в соответствии с командами текущего состояния, повторяющими профиль полета и изменение маршрута головного ОПСВ, при этом в случае возникновения внештатной ситуации, то для устранения непредвиденных проблем с безопасностью выполнения следящего полета пилот-оператор принимает на себя непосредственное управление ведомым ДПСВ, отменяя команды текущего состояния, выдаваемые автопилотом при автономной работе следящего полета, причем система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, при этом каждый сенсорный компьютер предыдущего и последующего из ведомых ДПСВ, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного ОПСВ и предыдущего ДПСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета, и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета каждого ДПСВ в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность поочередной или одновременной атаки авиагруппы, интегрированы к автономному стратегическому роению.
Кроме того, в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с одним или несколькими датчиками, включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, а их компьютер управления полетом выполнен с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, но и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать как сбор данных от каждого видеодатчика, так и преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет головного ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование следящего полета ведомым ДПСВ через компьютер управления полетом.
Кроме того, в упомянутой АПЛ, представляющей собой подводный авианосец-полукатамаран (ПАПК), включающий одно- и двухкорпусную соответственно носовую и с движителями кормовую части, выполненный с тремя прочными корпусами, образующими в кормовой части межкорпусной туннель, связаны между собой и сверху прочными поперечной кормовой структурой и корпусом палубы, внешние борта носовой части которой плавно переходят во внешние борта кормовой части, имеют наружные равно- или разновеликие диаметры, составляющие для трех корпусов или большей носовой части корпуса 35%/9,6% от ширины кормовой части/длины корпуса палубы, и способность одновременно погружаться с надводного положения в подводное и обратно, но и перемещаться под водой или по воде и в полупогруженном состоянии, последнее, наряду с радиопоглощающим покрытием левой и правой ходовых рубок, имеющих, повышая малозаметность, наклоненные панели, размещенных по внешним бортам катамаранной части - одна для управления ПАПК, вторая для контроля полетов, используемый упомянутый ПАК с надводного положения автономно или совместно с другими ПАПК, состыкованными между собой вдоль их продольных осей в единую СПРУТ с палубными ОПСВ и ДПСВ, имеющими в бомбоотсеках управляемые ракеты и возможность выполнения ВВП или КВП с одного корпуса палубы ПАПК или, например, с двух корпусов палуб ПАПК, жестко состыкованных в СПРУТ с образованием удвоенной по длине верхней их совместной палубы, при этом однокорпусная носовая часть и катамаранная кормовая часть в своих поперечных сечениях имеют плавные криволинейные обводы, соответствующие водоизмещающему режиму движения, и разделены зоной перехода их обводов, которые снижают сопротивление движению в воде, особенно, на относительных скоростях в диапазоне чисел Фруда Fn=0,45…0,55, соответствующих быстроходному режиму движения, полное сопротивление полукатамарана меньше полного сопротивления сопоставляемого с ним однокорпусного судна на 12…15%, причем носовая и кормовая части корпуса верхней палубы ПАПК, имеющие на их торцах соответствующие отсоединяемые внешние и стационарные внутренние элементы с возможностью их взаимодействия, например, в трех автоматических стыковочных узлах с фиксаторами разъемного типа, но и выполненные соответственно прямоугольной и трапециевидной формы в плане, имеют их суммарную длину большую, чем длина полукатамаранной формы его корпуса, снабженного с внешних его бортов большого удлинения тандемными подводными крыльями, убираемыми при необходимости в боковые верхние ниши их корпусов, повышающими при их раскладывании поперечно-продольную остойчивость и при подводном, и надводном положении, но и при этом полукатамаранная форма корпуса ПАПК, улучшая возможность для размещения оборудования, обеспечивает увеличение площади корпуса верхней его палубы, осадки в надводном положении и некоторое повышение поперечной остойчивости, причем катамаранная кормовая часть ПАПК, имеющая корпус верхней палубы, который полностью перекрывает сверху туннель между большого удлинения ее корпусами, снабжена поперечной структурой, которая частично перекрывает снизу туннель между ее корпусами и образует кормовой межкорпусной отсек, который, имея нижнее и верхнее люковые закрытия, обеспечивает по эксплуатационным условиям, например, для спуска на воду каких-либо забортных частей оборудования, подводных аппаратов различного назначения, например, суперторпеды [https://www.vpk-news.ru/articles/48763] многоцелевой океанской системы «Посейдон» или спасательных самоходных аппаратов для транспортировки экипажа атомного ПАПК, причем в носовой части ПАПК установлен [http://militaryrussia.ru/blog/topic-338.html] гидроакустический комплекс МГК-600Б "Иртыш-Амфора-Б" и размещены четыре 533-мм и четыре 650-мм торпедных аппарата автоматизированного торпедно-ракетного комплекса, причем в корпусах катамаранной части ПАПК размещены ангары для хранения, заправки и заряжания ПАК, но и установлены самолетоподъемники, а для самообороны в надводном положении имеются выдвижные зенитно-ракетные комплексы [https://topwar.ru/4864-tulskiy-kashtan.html] 3М87 "Кортик", при этом для использования с технологией КВП и ОПСВ с ДПСВ, и самолетов МиГ-29К передний ПАПК в носовой и задний ПАПК в кормовой части, которые состыкованы в СПРУТ, снабжены соответственно поднимаемыми трамплином и тросами аэрофинишера.
Кроме того, для горизонтального полета малозаметных ОПСВ и ДПСВ, достигая маршевой тяговооруженности первого уровня - 0,26 или второго - 0,343, используется мощность их СУ 36% или 54% от работающих КГтД соответственно в конфигурации реактивных крылатого автожира или самолета, при этом в их конфигурации реактивного самолета, имея на высоте 11 км тяговооруженность 0,343 их СУ, достигается скорость полета М=0,828, причем в их конфигурации реактивного самолета с углом стреловидности, например, χ=+40°…45° и χ=60°…65°/-30°…36° соответственно их ЛРК и его передних/задних наплывов, имея на высоте 11 км тяговооруженность третьего 0,406 и четвертого уровня 0,51, используя соответственно 72% и 100% мощности СУ, достигается скорость M=0,88 и М=0,93 трансзвукового полета, причем каждый их КГтД в упомянутых КМГ снабжен перед упомянутым механизмом ВУВТ его реактивного сопла форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними за упомянутым ВОВ и задними перед форсажной камерой открытыми управляемыми створками КМГ для дополнительного в нее подвода воздуха, что позволит с перегрузом 15% взлетного их веса на высоте полета 11 км повысить тяговоуроженность комбинированной СУ с 0,51 до 0,69 и скорость с М=0,86 до М=1,04.
Благодаря наличию этих признаков, позволяющих освоить авианесущую ПЛ (АПЛ) с авиагруппой аппаратов вертикального взлета и посадки в ПАК, включающей более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одной парой дистанционно пилотируемых самолетов-вертолетов (ДПСВ), которые используются более чем с одной вертолетной площадки АПЛ, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения и по интегральной компоновке с плавным сопряжением фюзеляжа и крыла с наплывами, образующими единую несущую конструкцию - летающее ромбовидное крыло (ЛРК) в плане и содержит в двухвинтовой поперечной или продольной схеме (ДПоС или ДПрС) тянущие или толкающие несущие винты (НВ), размещенные в центроплане ЛРК на верхних или нижних равновеликих пилонах поперечного или поперечно-продольного профилированного ребра жесткости (ПРЖ), смонтированного с его размахом (Lпрж) между крыльевых мотогондол (КМГ) по их осям, установленных параллельно оси симметрии, вынесенных от передней и задней кромок ЛРК, имеющие равновеликие диаметры (Dнв), определяемые из соотношения: Dнв=(0,59…0,62)×Lпрж, м или Dнв=(0,9…0,93)×Lпрж, м, равноудаленные от центра масс с перекрытием равным a=1,33 или а=1,4 для трех- или четырехлопастных НВ, образующим форму в плане цифру восемь двух близко расположенных крыльевых кольцевых обтекателей (ККО), применяемые в ДПоС-Х2 или ДПрС-Х2 только при вертикальном и коротком взлете и посадке (ВВП и КВП), но и на переходных и барражирующих режимах полета с автоматически открываемыми/закрываемыми верхними продольными парами круглых или трапециевидных створок и нижними поперечными или продольными жалюзи-рулями, обеспечивающими свободный доступ воздуха в их ККО и выхода воздушного потока из них, образующими после их закрывания соответствующие поверхности ЛРК, интегрированного с КМГ, смонтированными на консолях ЛРК, оснащенными воздухозаборниками с регулируемым коническим центральным телом их комбинированных газотурбинных двигателей (КГтД), имеющих круглые сопла со всеракурсным управлением вектора тяги (ВУВТ), выполненных в виде двухконтурных двигателей, имеющих внешний и внутренний контуры соответственно кольцевой обтекатель (КО) с выносным однорядным вентилятором (ВОВ) и, по меньшей мере, одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ и/или каждый ВОВ, имеющий лопатки с большой круткой, работающий по тянущей схеме, создает при горизонтальном полете как реактивных винтокрыл а/автожира или самолета в пропульсивно-реактивной системе (ПРС) синхронную маршевую реактивную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с вертолета или винтокрыла с двумя КГтД, приводящими два НВ или два НВ с двумя ВОВ, создающими подъемную тягу или подъемную с маршевой в ПРС-R2 тяги в полетные конфигурации реактивных самолета или автожира соответственно с зафиксированными или авторотирующими их НВ при автоматически закрытых или открытых верхних створках и нижних жалюзи-рулей их ККО, но и обратно, причем на режимах ВВП и зависания для изменения балансировки по тангажу и курсу, но и крену или крену и курсу, но и тангажу, обеспечивается соответственно синфазным и дифференциальным отклонением поперечных или продольных нижних жалюзи-рулей в каждом ККО на углы -45°/+45° вперед-назад или влево-вправо, но и изменением на большие и меньшие углы установки левого-правого НВ или переднего-заднего НВ с созданием разновеликой подъемной их тяги. Все это позволит в палубных ОПСВ и ДПСВ с ЛРК и при наличии ВУВТ круглых реактивных сопел их КГтД упростить управляемость и обеспечить ее стабильность. В конфигурации реактивных автожира и самолета с симметрично-сбалансированной соответственно несущей системой и ЛРК, первая из них, управляя снижением скорости вращения НВ до 250 мин-1 и 150 мин-1 и углом атаки лопастей НВ, но и плоскостью их вращения, уменьшает вращательное сопротивления НВ на 12%. В случае отказа одной из ССТ на режиме зависания ОПСВ и ДПСВ их КГтД выполнены с автоматическим выравниванием и перераспределением оставшейся мощности ССТ между НВ, что упрощает управляемость и повышает безопасность. Система адаптируемого ЛРК позволит при отклонении вверх его внешних частей на угол 0°/12° в конфигурации реактивных автожира/самолета достичь скорости полета 550/880 км/ч. Размещение КГтД в КМГ позволит в схеме летающее крыло как выполнить несущий фюзеляж с его профилем по толщине достаточном только для размещения в нем ККО с НВ, что уменьшит аэродинамическое его сопротивление, так и достичь на форсажных режимах полета и высоте полета не менее 11 км в конфигурации реактивного самолета при отклонении вверх его частей на угол 65° достигается скорость полета 1105 км/ч.
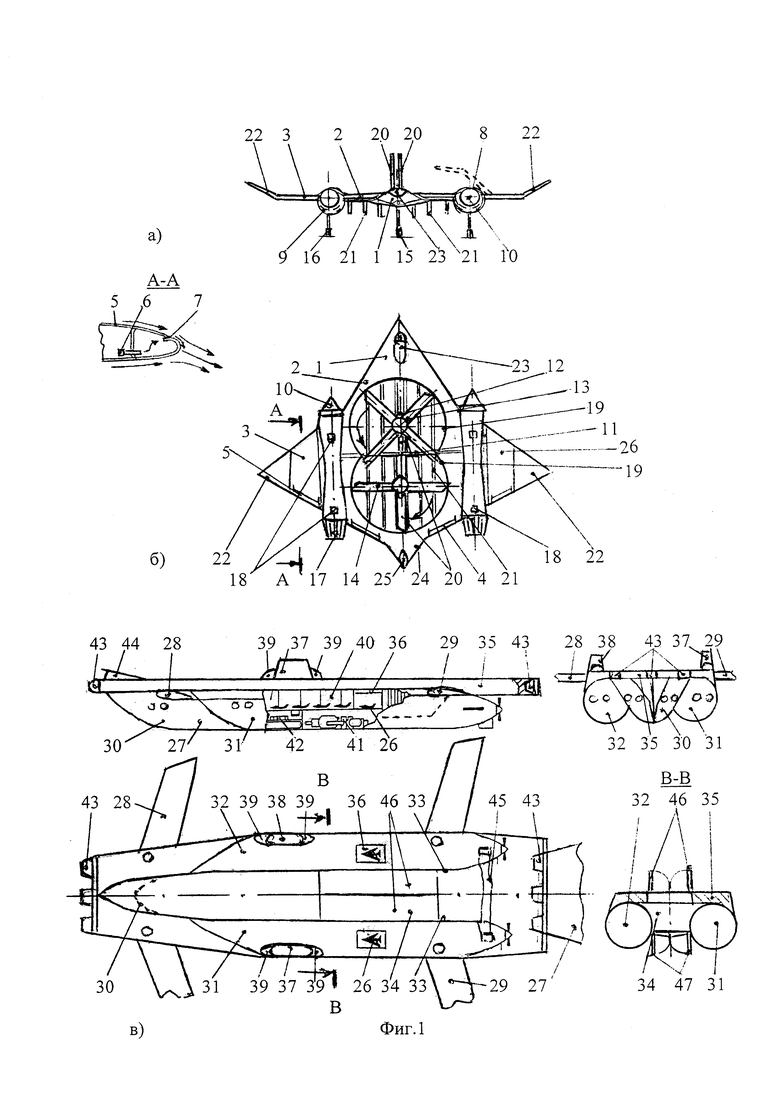
Предлагаемое изобретение многоцелевой СПРУТ с двумя атомными ПАПК, несущими палубные сверхзвуковые ОПСВ и ДПСВ, имеющие в предпочтительном варианте ДПрС-Х2 и на консолях ЛРК две КМГ с КГтД, приводящие тянущие продольные НВ и/или ВОВ в ПРС-R2, КГтД снабжены ВУВТ реактивных круглых сопел, иллюстрируется на фиг. 1 и общих видах спереди и сверху соответственно а) и б):
а) в полетной конфигурации винтокрыла КВП с КГтД, приводящими системой трансмиссии два НВ и их два ВОВ с реактивными соплами, отклоненными ВУВТ от горизонтали вниз под углом 45°, создающими подъемно-маршевую тягу, работающими совместно с щелевыми соплами реактивных закрылок на ЛРК, пунктиром показаны сложенные вверх концевые части ЛРК на режимах ВВП, зависания и на стоянке;
б) в полетной конфигурации автожира/самолета с углом стреловидности χ=40° и 65° треугольных секций ЛРК и его наплывов, авторотирующими/зафиксированными НВ внутри ККО при открытых/закрытых верхних створках и нижних жалюзи-рулей.
На фиг. 1в изображен ПАПК 27 в трех проекциях (на виде сверху условно показаны корпуса 30-32 и задний ПАПК 27 в СПРУТ) с ОПСВ 26 в ангаре 40 под верхней палубой 35, имеющей ВПП и самолетоподъемники 36, но и левую 37 и правую 38 рубки соответственно для управления ПАПК 27 и контроля полетов авиагруппы. В корпусах 31-32 катамаранной части имеются авиационные ангары для техобслуживания, перевозки, заправки топливом 41 и заряжания боекомплектом 42 авиагруппы.
Многоцелевая океанская СПРУТ, образуемая из двух идентичных ПАПК, представлена на фиг. 1 одним ПАПК 27 и сверхзвуковым ОПСВ 26, выполненным по гибридной схеме и концепции ДПрС-Х2 с ITPC-R2, имеет планер из алюминиевых сплавов и композитного углепластика, фюзеляж 1 интегрирован с ЛРК, включающим внутренние 2 и внешние 3 секции с их соответствующими 4 и 5 реактивными закрылками, имеющими в их полостях воздуховод с клапаном 6, переключающим поток воздуха, направляемого от компрессора КГтД к щелевым 7 соплам в системе циркуляции сверхзвукового воздушного потока. Две КМГ 8, интегрированные с ЛРК 2-3, имеют нижние отсеки 9 вооружения, воздухозаборники их КГтД с конусным телом 10 и между ними ПРЖ 11 с пилонами 12 переднего 13 и заднего 14 НВ (см. фиг. 1б). Снизу фюзеляжа 1 и КМГ 8 имеется трехопорное убирающееся шасси с передним 15 и главными задними 16 колесами. Продольные передний 13 и задний 14 НВ имеют для компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение соответственно против часовой и по часовой стрелки, выполнены без автоматов перекоса, жестким креплением их лопастей, создают подъемную тягу совместно с подъемной силой ЛРК 2-3 и его щелевых 7 сопел на реактивных закрылках 4-5 в полетной конфигурации винтокрыла КВП. В комбинированной СУ каждый КГтД имеет внешний с ВОВ и внутренний с ССТ контуры, но и передний вывод вала, связанный с промежуточным редуктором, выходные соосные внешний и внутренний валы которого передают крутящий момент через муфты сцепления на ВОВ и угловой в плане редуктор с его синхронизирующим валом, проложенным в носке ПРЖ, на крестообразный в плане редуктор с его угловыми редукторами НВ 13-14 и содержит реактивное круглое сопло 17 с ВУВТ, передние и задние управляемые створки 18, работающие на форсажных режимах для дополнительного подвода воздуха в КМГ 8. Два НВ 13-14 смонтированы в ККО 19 с верхними круглыми створками 20 и нижними рулями-жалюзи 21. Внешние секции 3 адаптивного ЛРК 2-3, синхронно отклоняющиеся от горизонтали вверх на угол 12°/25° и 65°/150°, повышают путевую устойчивость и уменьшают балансировочное сопротивление в сверхзвуковом полете/стояночную площадь, снабжены отклоненными вверх треугольными в плане законцовками 22. БСУ ОПСВ снабжена возможностью опционального управления пилотами из двухместной кабины 23. В кормовой профилированной части ЛРК 2-3 имеется V-образная задняя кромка 24 и на ее конце по оси симметрии обтекатель 25 с выдвижной штангой магнитометра и опускаемой антенной ГАС (на фиг. 1 не показано).
Управление ОПСВ обеспечивается общим и дифференциальным изменением шага НВ 13-14 и отклонением в КГтД реактивных сопел 17 с ВУВТ. При крейсерском скоростном или высокоскоростном полете в конфигурации винтокрыла или самолета подъемная сила создается НВ 13-14 с ЛРК 2-3 и ПВК 11 или ЛРК 2-3, маршевая тяга - IIPC-R2 через сопла 17 с ВУВТ в КГтД, на режиме перехода - ЛРК 2-3 с ПВК 11 и НВ 13-14. При создании подъемной силы НВ 13-14 и подъемно-маршевой тяги соплами 17 с ВУВТ и (см. рис. 1в) обеспечиваются режимы КВП, при котором в крыльевых полостях закрылок 4-5 сверхзвуковой воздушный поток выдувается из щелевых сопел 7 (см. сечение А-А), образуя эффект Коанда, повышают подъемную силу ЛРК 2-3. На режимах ВВП и зависания каждый НВ 13-14 выполнен с жестким креплением лопастей и без автомата их перекоса, а изменение балансировки по крену и курсу, но и тангажу, обеспечивается соответственно синфазным и дифференциальным отклонением поперечных нижних жалюзи-рулей 21 в каждом ККО 19 на углы влево по полету -45° и вправо +45°, но и изменением на большие и меньшие углы установки переднего 13 и заднего 14 НВ (см. фиг. 1б). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения НВ 13-14. По мере разгона с ростом подъемной силы ЛРК 2-3 с ПВК 11 подъемная сила двух НВ 13-14 уменьшается. При достижении скоростей полета 450…500 км/ч и для перехода в конфигурацию реактивного самолета два НВ 13-14 отключаются от системы трансмиссии, одновременно останавливаются их тормозами с последующей фиксацией лопастей в их ККО 19 при закрытых верхних створках 20 и нижних рулей-жалюзи 21 с образованием соответствующих поверхностей ЛРК 2-3. (см. фиг. 1а). При создании реактивной тяги круглыми соплами 17 КГтД производится горизонтальный полет ОПСВ 26 в конфигурации реактивного самолета, при котором изменение балансировки по тангажу, курсу и крену создается соответственно синфазным и дифференциальным одновременным отклонением реактивных сопел 17 КГтД с ВУВТ обоих вертикально вверх-вниз, обоих горизонтально влево-вправо и вертикально одного вверх, а другого вниз.
Атомный ПАПК 27 с тандемными подводными раскладываемыми крыльями 28-29, представленный на фиг. 1в, имеет в полукатамаранной форме корпуса одно- и двухкорпусную соответственно носовую 30 и кормовую 31-32 части, выполненный с тремя прочными корпусами 30-32, связанными, образуя в кормовой части межкорпусной туннель 33, между собой и сверху прочными кормовой поперечной структурой 34 и корпусом верхней палубы 35 с ВПП и кормовыми самолетоподъемниками 36, но и левой 37 и правой 38 рубками соответственно для управления ПАПК 27 и контроля полетов авиагруппы, а для самообороны в надводном положении имеются выдвижные ЗРК 39, смонтированные спереди и сзади рубок 37 и 38. Заправленные топливом и заряженные боекомплектом ДПСВ и ОПСВ поочередно поднимаются на самолетоподъемниках 36 и перемещаются на площадку палубы 35. После их взлета и выполнения разведывательно-ударной миссии они возвращаются для их вертикальной посадки на площадку палубы 35 с последующим их перемещением на самолетоподъемники 36 и далее в ангары 40 в корпус 31-32 для техобслуживания, заправки топливом 41 и заряжания боекомплектом 42. Спереди и сзади на торцах корпуса палубы 35 ПАПК 27 смонтированы три пары автоматических стыковочных узлов 43 с фиксаторами разъемного типа с возможностью одновременной стыковки, например, двух корпусов 35 ПАПК 27 в единую СПРУТ. Для использования в СПРУТ истребителей мод. МиГ-29К или Су-33К передний ПАПК в носовой и задний ПАПК в кормовой части снабжены соответственно выдвижными трамплином 44 и тросами 45 аэрофинишера. Поперечная структура 34 имеет верхние 46/нижние 47 люковые закрытия.
Таким образом, палубные ОПСВ и ДПСВ с ЛРК, КГтД в КМГ, имеющие для создания вертикальной тяги два НВ или горизонтальной тяги два ВОВ соответственно с работающими двумя НВ или с зафиксированными лопастями НВ в закрытых их ККО, представляет собой конвертоплан с поперечными или продольными НВ в ККО и ПРС-R2. Адаптивное ЛРК с передними и задними его наплывами увеличивает показатели аэродинамических и структурных преимуществ при преобразовании в реактивный самолет с зафиксированными лопастями НВ в закрытых ККО, но и позволит уменьшить вес планера, выполненного по малозаметной технологии с радиопоглощающими материалами, увеличить взлетный вес на 17%, экономию на 20% топлива либо дальность полета на 29% при сохранении взлетного веса и выполнения барражирующего полета со скоростью 550 км/ч в конфигурации крылатого автожира, но и обеспечивающего скорость захода на посадку в 72-80 км/ч при угле атаки α=15,9°
Кроме того, принцип увеличения подъемной силы ЛРК, особенно, с его развитыми наплывами в сверхзвуковых ОПСВ и ДПСВ на взлетно-посадочных или маневрирования на вертолетных и самолетных режимах их полета обеспечивается соответственно тремя способами без использования отклонения механических закрылков или работы автоматов перекоса на поперечных НВ и отклонения механических элеронов с элевонами. Вместо этого сверхзвуковые воздушные потоки отбираются от каждого КГтД и направляются через реактивные щелевые сопла закрылок ЛРК и круглые сопла КГтД с ВУВТ для управления полетом. Эти новые методы управления устраняют традиционную необходимость в сложных механических подвижных частях, используемых для перемещения закрылков, элеронов и элевонов и управления ОПСВ и ДПСВ во время полета, но и позволяют маневрировать при помощи изменения направления реактивной тяги посредством каждого круглого сопла КГтД с ВУВТ.
Авиационная группа СПРУТ включает однотипные ПАПК с ОПСВ и ДПСВ (см. табл. 1), используемые с палубы, несущие в отсеках вооружения ОПСВ/ДПСВ по 2/3 штук АПР-3МЭ или ПКР типа Х-35УЭ. В ПАК головной ОПСВ, который полностью оцифрован с использованием новейших технологий, включая и совместное использование пилотируемых и беспилотных летательных аппаратов, так называемое manned and unmanned teaming (MUM-T), которое позволяет пилотам ОПСВ контролировать траекторию полета группы ведомых ДПСВ и их боевые нагрузки. Четвертый уровень MUM-T позволяет пилотам ОПСВ не только получать реальные сенсорные изображения с авиагруппы ведомых ДПСВ и управлять сенсорными и оружейными нагрузками, но и их навигацией и глобальным позиционированием при следящем полете. Преимущества в части мореходности и новых компоновочных возможностей полукатамаранной формы корпуса ПАПК позволяют использовать в водоизмещающем режиме скоростей без ограничения их размерений как автономно, так и совместно с двумя ПАПК, состыкованными в СПРУТ, повышают боевую устойчивость и безопасность, а рой ДПСВ создает буферную авиазону между ПВО цели и ОПСВ, и СПРУТ. 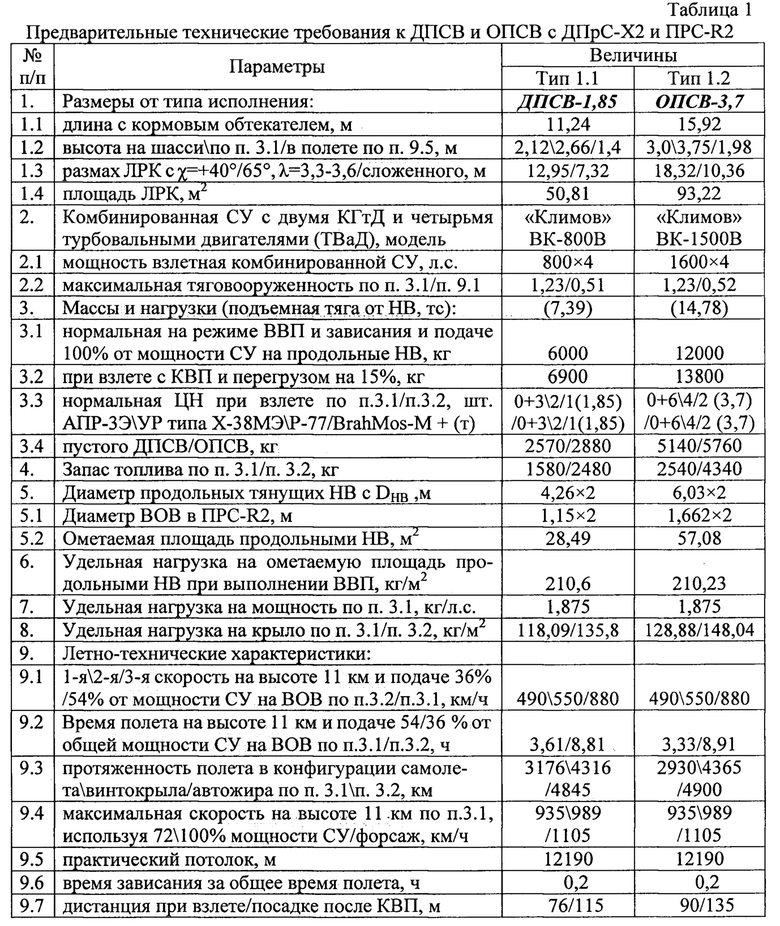
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС АВИАЦИОННЫЙ РАЗВЕДЫВАТЕЛЬНО - ПОРАЖАЮЩИЙ | 2019 |
|
RU2725563C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНО-ПОРАЖАЮЩАЯ | 2020 |
|
RU2753779C1 |
| СТРАТЕГИЧЕСКАЯ АВИАЦИОННАЯ ТРАНСАРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2736530C1 |
Изобретение относится к области военной техники, в частности к конструкциям разведывательно-ударных комплексов. Система подводная разведывательно-ударная трансформируемая с более чем одной подводной лодкой (ПЛ) содержит палубный авиационный комплекс (ПАК) с летательным аппаратом. Авианесущая ПЛ (АПЛ) с авиагруппой аппаратов вертикального взлета и посадки включает более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одной парой дистанционно пилотируемых самолетов-вертолетов (ДПСВ), которые используются более чем с одной вертолетной площадки АПЛ. Каждый ОПСВ и ДПСВ выполнен без вертикального оперения и по интегральной компоновке с плавным сопряжением фюзеляжа и крыла с наплывами, образующими единую несущую конструкцию - летающее ромбовидное крыло (ЛРК) в плане, и содержит в двухвинтовой поперечной или продольной схемах тянущие или толкающие несущие винты (НВ), размещенные в центроплане ЛРК на верхних или нижних равновеликих пилонах поперечного или поперечно-продольного профилированного ребра жесткости, смонтированного между крыльевыми мотогондолами по их осям. Обеспечивается увеличение вероятности поражения подводной и надводной цели, расположенной на большой дальности, возможность атаки цели после продолжительного полета в режиме зависания. 4 з.п. ф-лы, 1 ил., 1 табл.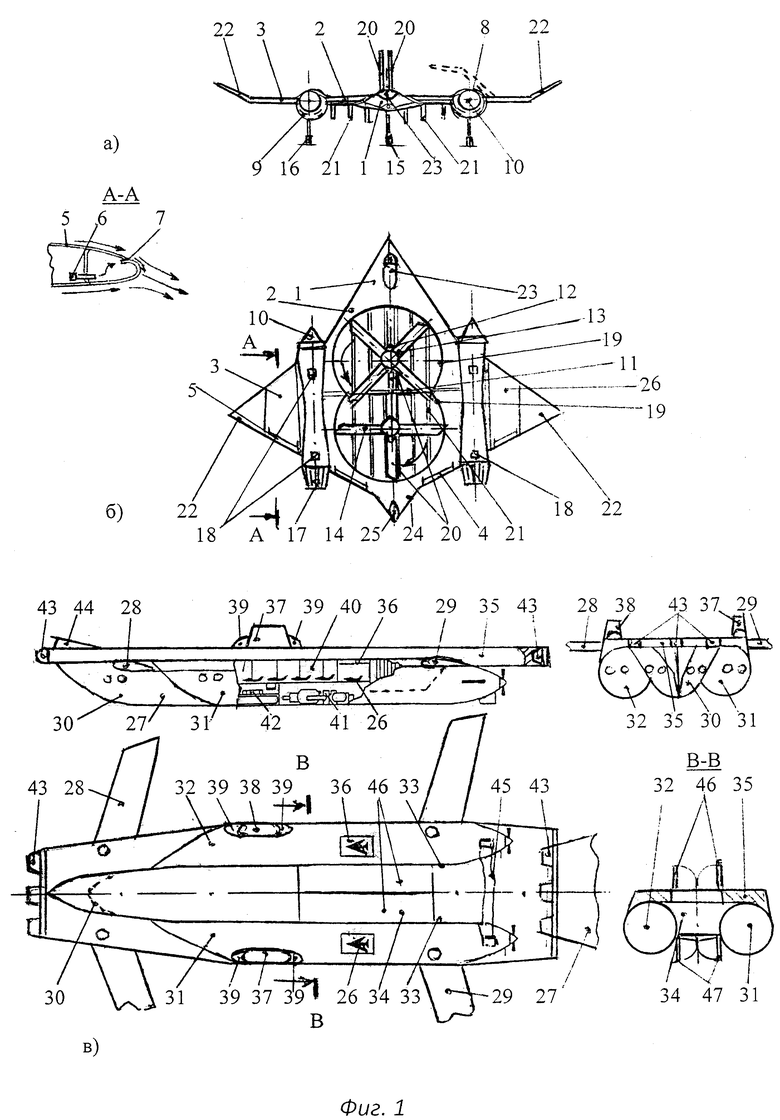
1. Система подводная разведывательно-ударная трансформируемая (СПРУТ) с более чем одной подводной лодкой (ПЛ), содержащей палубный авиационный комплекс (ПАК) с беспилотным летательным аппаратом (БЛА), имеющим фюзеляж с отделяемой управляемой ракетой, несущее крыло, двигатель силовой установки (СУ), бортовую систему управления (БСУ), обеспечивающую телемеханическое управление с командного пункта (КП) ПЛ, отличающаяся тем, что авианесущая ПЛ (АПЛ) с авиагруппой аппаратов вертикального взлета и посадки в ПАК, включающей более чем один опционально пилотируемый самолет-вертолет (ОПСВ) с более чем одной парой дистанционно пилотируемых самолетов-вертолетов (ДПСВ), которые используются более чем с одной вертолетной площадки АПЛ, причем каждый ОПСВ и ДПСВ выполнен без вертикального оперения и по интегральной компоновке с плавным сопряжением фюзеляжа и крыла с наплывами, образующими единую несущую конструкцию - летающее ромбовидное крыло (ЛРК) в плане, и содержит в двухвинтовой поперечной или продольной схеме (ДПоС или ДПрС) тянущие или толкающие несущие винты (НВ), размещенные в центроплане ЛРК на верхних или нижних равновеликих пилонах поперечного или поперечно-продольного профилированного ребра жесткости (ПРЖ), смонтированного с его размахом (Lпрж) между крыльевых мотогондол (КМГ) по их осям, установленных параллельно оси симметрии, вынесенных от передней и задней кромок ЛРК, имеющие равновеликие диаметры (Dнв), определяемые из соотношения: Dнв=(0,59…0,62)×Lпрж, м или Dнв=(0,9…0,93)×Lпрж, м, равноудаленные от центра масс с перекрытием, равным а=1,33 или а=1,4 для трех- или четырехлопастных НВ, образующим форму в плане цифру восемь двух близко расположенных крыльевых кольцевых обтекателей (ККО), применяемые в ДПоС-Х2 или ДПрС-Х2 только при вертикальном и коротком взлете и посадке (ВВП и КВП), но и на переходных и барражирующих режимах полета с автоматически открываемыми/закрываемыми верхними продольными парами круглых или трапециевидных створок и нижними поперечными или продольными жалюзи-рулями, обеспечивающими свободный доступ воздуха в их ККО и выхода воздушного потока из них, образующими после их закрывания соответствующие поверхности ЛРК, интегрированного с КМГ, смонтированными на консолях ЛРК, оснащенными воздухозаборниками с регулируемым коническим центральным телом их комбинированных газотурбинных двигателей (КГтД), имеющих круглые сопла со всеракурсным управлением вектора тяги (ВУВТ), выполненных в виде двухконтурных двигателей, имеющих внешний и внутренний контуры, соответственно кольцевой обтекатель (КО) с выносным однорядным вентилятором (ВОВ) и по меньшей мере одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ и/или каждый ВОВ, имеющий лопатки с большой круткой, работающий по тянущей схеме, создает при горизонтальном полете как реактивных винтокрыла/автожира или самолета в пропульсивно-реактивной системе (ПРС) синхронную маршевую реактивную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с вертолета или винтокрыла с двумя КГтД, приводящими два НВ или два НВ с двумя ВОВ, создающими подъемную тягу или подъемную с маршевой в ПРС-R2 тяги в полетные конфигурации реактивных самолета или автожира соответственно с зафиксированными или авторотирующими их НВ при автоматически закрытых или открытых верхних створках и нижних жалюзи-рулей их ККО, но и обратно, причем на режимах ВВП и зависания для изменения балансировки по тангажу и курсу, но и крену или крену и курсу, но и тангажу, обеспечивается соответственно синфазным и дифференциальным отклонением поперечных или продольных нижних жалюзи-рулей в каждом ККО на углы -45°/+45° вперед-назад или влево-вправо, но и изменением на большие и меньшие углы установки левого-правого НВ или переднего-заднего НВ с созданием разновеликой подъемной их тяги.
2. СПРУТ по п. 1, отличающаяся тем, что в упомянутых ОПСВ и ДПСВ снаружи их КМГ внешние стреловидные или треугольные секции адаптивного ЛРК, синхронно отклоняющиеся от горизонтали вверх на угол 12°/25° и 65°/150°, что соответственно повышает путевую устойчивость при скорости полета от 0,5 Маха (М) до М=0,828/М=0,93 и уменьшает балансировочное сопротивление в сверхзвуковом полете/стояночную площадь, снабжены отклоненными вверх развитыми треугольными в плане законцовками, устанавливаемыми вертикально при повороте внешних секций на угол 65°, а в системе трансмиссии каждый их КГтД в упомянутой КМГ, в которой между ВОВ и ССТ соосно с двумя последними смонтирован промежуточный редуктор, имеющий продольные как входные валы, например, от двух ССТ, так и выходные соосные внешний и внутренний валы, передающие крутящий момент через муфты сцепления соответственно на ВОВ и посредством углового в плане редуктора, размещенного спереди ВОВ, и его поперечного синхронизирующего вала, проложенного в носке ПРЖ, передающего в ДПоС-Х2 на два консольных Т-образных редуктора или ДПрС-Х2 один крестообразный в плане редуктор с продольными валами и угловыми редукторами равновеликую мощность соответственно на левый/правый или передний/задний НВ, выполненные с жестким креплением лопастей и без автомата их перекоса, вращающиеся при виде сверху в противоположные стороны соответственно против и по часовой стрелке, а на взлетно-посадочных режимах полета при выполнении КВП внутренние и внешние секции их ЛРК по обе стороны от односторонней КМГ и внутри задних их кромок снабжены равновеликими по длине крыльевыми полостями, имеющими на суммарной их длине, составляющей 1/5…1/4 от размаха ЛРК, систему управления циркуляцией воздушного потока, обеспечивающую направление от компрессора одностороннего КГтД сверхзвуковых воздушных потоков, которые, направляясь по соответствующим воздуховодам с их клапанами к каждой крыльевой полости, выдуваются из полости через реактивные верхние щелевые сопла, размещенные над округлой задней кромкой ЛРК обтекаемой формы несущего профиля, увеличивающие, используя эффект Коанда и выполняя роль реактивных закрылков, подъемную силу ЛРК на режимах КВП, исключающие механическое отклонение и подвижные их зазоры, уменьшая эффективную площадь рассеивания, а в полетной их конфигурации реактивного самолета изменение балансировки по тангажу, курсу и крену создается соответственно синфазным и дифференциальным одновременным отклонением в двух КГтД их реактивных сопел с упомянутыми ВУВТ обоих вертикально вверх-вниз, обоих горизонтально влево-вправо и вертикально одного вверх, а другого вниз, причем на режимах ВВП и зависания ОПСВ и ДПСВ при удельной нагрузке на мощность их СУ, составляющей ρN=l,875 кг/л.с., каждая их ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ДПоС-Х2/ДПрС-Х2, составляющей ρВТ=1,23, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод их НВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и перераспределением оставшейся мощности между НВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в ДПоС-Х2/ДПрС-Х2, составляющей ρВТ=1,18 или ρВТ=1,1, обеспечит два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и их фюзеляжа, и дисков вращения их НВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован, чтобы: определить относительную позицию между их фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость управляемого снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом, а их ЛРК, выполненное с передними и задними развитыми наплывами, образующими переменную и пилообразную стреловидность по передней и задней кромкам, имеет профилированную кормовую часть с V-образной в плане задней кромкой, снабженную обтекателем с задним и нижним отсеками, оснащенными выдвижной штангой магнитометра и опускаемой лебедкой на тросе под воду антенной гидроакустической станции, которые используются при барражирующем полете и зависании, при этом несущий фюзеляж ДПСВ и ОПСВ выполнен соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПСВ, имеет скошенные боковые стороны по всей его длине, уменьшая эффективную площадь рассеивания, образуя при виде спереди ромбовидное поперечное сечение, большая часть которого располагается над или под средней линией ЛРК, имеющего в интегрированных с фюзеляжем корневых его наплывах несущие части пассажирского или грузового салона, а их КМГ имеют отсеки внутреннего вооружения с автоматическими их пилообразными створками и их ПУ с закрепленными на них авиационными противолодочными или противокорабельными ракетами (АПР или ПКР) и УР воздух-воздух, а их комплекс вооружения имеет авиационные пушку или крупнокалиберный многоствольный пулемет, установленный в обтекателе носовой части фюзеляжа и поражающие дозвуковые ударные БЛА и крылатые ракеты, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, причем при противолодочной обороне ОПСВ и ДПСВ, использующие полетную конфигурацию крылатого автожира, применяется выдвижной магнитометр ОПСВ в процессе наведения одной или двух АПР залпа на цель с автоматическим определением значения вводимого адаптивного угла упреждения, который при сближении с целью корректируется, при этом введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом, обеспечивающим попадание одной или двумя АПР залпа преимущественно в прочный корпус подводной лодки-цели, причем при противокорабельной обороне ОПСВ и ДПСВ, которые в конфигурации реактивного самолета в их бомбоотсеках на ПУ несут ПКР Х-35У или Х-38М для создания буферной безопасной авиазоны между головным ОПСВ и ПВО надводного корабля-цели, увеличивающей радиус действия ПКР Х-38М/Х-35У с 40/130 до 400 км, при этом с головного ОПСВ его радаром типа Н036 обеспечивается целеуказание, а управление ДПСВ - вторым пилотом ОПСВ, используя маловысотный профиль полета и систему самообороны ДПСВ - станцию активных электронных помех, причем упомянутая БСУ ОПСВ, выполненного с электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления пилотом и/или их комбинации, снабжена возможностью опционального его управления пилотами из двухместной кабины, но и его использования в составе авиагруппы в качестве головного с более чем, например, двумя ДПСВ, более чем один из которых, являясь ведомым, автоматически повторяет его системой автопилота в следящем полете маневры головного ОПСВ, а другой - управляется вторым пилотом-оператором с ОПСВ, а затем наоборот, причем при отсутствии вмешательства пилота-оператора система автопилота ведомого ДПСВ выполняет управление полетом в соответствии с командами текущего состояния, повторяющими профиль полета и изменение маршрута головного ОПСВ, при этом в случае возникновения внештатной ситуации, для устранения непредвиденных проблем с безопасностью выполнения следящего полета пилот-оператор принимает на себя непосредственное управление ведомым ДПСВ, отменяя команды текущего состояния, выдаваемые автопилотом при автономной работе следящего полета, причем система управления формированием относительной позиции в следящем полете, содержащая один или несколько датчиков, расположенных на ведомом ДПСВ, сконфигурированы для обнаружения данных, касающихся его положения относительно положения головного ОПСВ, имеющего компьютер управления полетом, находящийся в рабочем состоянии с одним или несколькими датчиками, содержащий дополнительный сенсорный компьютер, который сконфигурирован, чтобы: определить относительную позицию между ведомым ДПСВ и головным ОПСВ; сравнить относительную позицию с выбранной относительной позицией; определить скорость ведомого ДПСВ, необходимую для его перемещения в выбранное относительное положение; преобразовывать скорость следящего устройства во входы управления полетом; ограничивать прямое перемещение ведомого ДПСВ относительно ОПСВ, обеспечивающего через входы его компьютера управления полетом относительное их безопасное положение в совместном полете, при этом каждый сенсорный компьютер предыдущего и последующего из ведомых ДПСВ, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного ОПСВ и предыдущего ДПСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета, и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета каждого ДПСВ в соответствии с текущим профилем полета; мульти-модальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность поочередной или одновременной атаки авиагруппы, интегрированы к автономному стратегическому роению.
3. Система по п. 2, отличающаяся тем, что в упомянутых ОПСВ и ДПСВ система управления формированием их относительной позиции в полете с одним или несколькими датчиками включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, гидролокаторов, датчиков глобального позиционирования, а их компьютер управления полетом выполнен с дополнительным компьютером суммирования данных датчиков и каналом приема-передачи данных, расположенным на головном ОПСВ для получения глобальных данных о местоположении от ведомого ДПСВ, но и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем компьютер суммирования данных датчиков и каналом передачи данных имеет многополосное радиочастотное оборудование с направленной антенной, способной по каналам закрытой связи передавать несколько видеопотоков, обеспечивать как сбор данных от каждого видеодатчика, так и преобразование изображений с каждого видеодатчика в относительное положение, которое определяет на основе глобального положения головного ОПСВ, передаваемого на ведомый ДПСВ, при этом компьютер суммирования данных полностью интегрирован в интерфейс пилота и системой управления ОПСВ, обеспечивающей следящий полет ведомого ДПСВ, который по необходимости может быть отключен посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, причем компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет головного ОПСВ небезопасен для относительного его положения от ведомого ДПСВ, но и отключающего формирование следящего полета ведомым ДПСВ через компьютер управления полетом.
4. СПРУТ по любому из пп. 1, 2, отличающаяся тем, что в упомянутой АПЛ, представляющей собой подводный авианосец-полукатамаран (ПАПК), включающий одно- и двухкорпусную соответственно носовую и с движителями кормовую части, выполненный с тремя прочными корпусами, образующими в кормовой части межкорпусной туннель, связаны между собой и сверху прочными поперечной кормовой структурой и корпусом палубы, внешние борта носовой части которой плавно переходят во внешние борта кормовой части, имеют наружные равно- или разновеликие диаметры, составляющие для трех корпусов или большей носовой части корпуса 35%/9,6% от ширины кормовой части/длины корпуса палубы, и способность одновременно погружаться с надводного положения в подводное и обратно, но и перемещаться под водой или по воде и в полупогруженном состоянии, последнее, наряду с радиопоглощающим покрытием левой и правой ходовых рубок, имеющих, повышая малозаметность, наклоненные панели, размещенных по внешним бортам катамаранной части - одна для управления ПАПК, вторая для контроля полетов, используемый упомянутый ПАК с надводного положения автономно или совместно с другими ПАПК, состыкованными между собой вдоль их продольных осей в единую СПРУТ с палубными ОПСВ и ДПСВ, имеющими в бомбоотсеках управляемые ракеты и возможность выполнения ВВП или КВП с одного корпуса палубы ПАПК или, например, с двух корпусов палуб ПАПК, жестко состыкованных в СПРУТ с образованием удвоенной по длине верхней их совместной палубы, при этом однокорпусная носовая часть и катамаранная кормовая часть в своих поперечных сечениях имеют плавные криволинейные обводы, соответствующие водоизмещающему режиму движения, и разделены зоной перехода их обводов, которые снижают сопротивление движению в воде, особенно, на относительных скоростях в диапазоне чисел Фруда Fn=0,45…0,55, соответствующих быстроходному режиму движения, полное сопротивление полукатамарана меньше полного сопротивления сопоставляемого с ним однокорпусного судна на 12…15%, причем носовая и кормовая части корпуса верхней палубы ПАПК, имеющие на их торцах соответствующие отсоединяемые внешние и стационарные внутренние элементы с возможностью их взаимодействия, например, в трех автоматических стыковочных узлах с фиксаторами разъемного типа, но и выполненные соответственно трапециевидной и прямоугольной формы в плане, имеют их суммарную длину большую, чем длина полукатамаранной формы его корпуса, снабженного с внешних его бортов большого удлинения тандемными подводными крыльями, убираемыми при необходимости в боковые верхние ниши их корпусов, повышающими при их раскладывании поперечно-продольную остойчивость и при подводном, и надводном положении, но и при этом полукатамаранная форма корпуса ПАПК, улучшая возможность для размещения оборудования, обеспечивает увеличение площади корпуса верхней его палубы, осадки в надводном положении и некоторое повышение поперечной остойчивости, причем катамаранная кормовая часть ПАПК, имеющая корпус верхней палубы, который полностью перекрывает сверху туннель между большого удлинения ее корпусами, снабжена поперечной структурой, которая частично перекрывает снизу туннель между ее корпусами и образует кормовой межкорпусной отсек, который, имея нижнее и верхнее люковые закрытия, обеспечивает по эксплуатационным условиям, например, для спуска на воду каких-либо забортных частей оборудования, подводных аппаратов различного назначения, например, суперторпеды многоцелевой океанской системы «Посейдон» или спасательных самоходных аппаратов для транспортировки экипажа атомного ПАПК, причем в носовой части ПАПК установлен гидроакустический комплекс МГК-600Б "Иртыш-Амфора-Б" и размещены четыре 533-мм и четыре 650-мм торпедных аппарата автоматизированного торпедно-ракетного комплекса, причем в корпусах катамаранной части ПАПК размещены ангары для хранения, заправки и заряжания ПАК, но и установлены самолетоподъемники, а для самообороны в надводном положении имеются выдвижные зенитно-ракетные комплексы 3М87 "Кортик", при этом для использования с технологией КВП и ОПСВ с ДПСВ и самолетов МиГ-29К передний ПАПК в носовой и задний ПАПК в кормовой части, которые состыкованы в СПРУТ, снабжены соответственно поднимаемыми трамплином и тросами аэрофинишерами.
5. СПРУТ по любому из пп. 1, 2, отличающаяся тем, что для горизонтального полета малозаметных ОПСВ и ДПСВ, достигая маршевой тяговооруженности первого уровня - 0,26 или второго - 0,343, используется мощность их СУ 36% или 54% от работающих КГтД соответственно в конфигурации реактивных крылатого автожира или самолета, при этом в их конфигурации реактивного самолета, имея на высоте 11 км тяговооруженность 0,343 их СУ, достигается скорость полета М=0,828, причем в их конфигурации реактивного самолета с углом стреловидности, например, χ=+40°…45° и χ=+60°…65°/-30°…36° соответственно их ЛРК и его передних/задних наплывов, имея на высоте 11 км тяговооруженность третьего 0,406 и четвертого уровня 0,51, используя соответственно 72% и 100% мощности СУ, достигается скорость М=0,88 и М=0,93 трансзвукового полета, причем каждый их КГтД в упомянутых КМГ снабжен перед упомянутым механизмом ВУВТ его реактивного сопла форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними за упомянутым ВОВ и задними перед форсажной камерой открытыми управляемыми створками КМГ для дополнительного в нее подвода воздуха, что позволит с перегрузом 15% взлетного их веса на высоте полета 11 км повысить тяговооруженность комбинированной СУ с 0,51 до 0,69 и скорость с М=0,86 до М=1,04.
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| НАРУЖНОЕ УСТРОЙСТВО ХРАНЕНИЯ ДЛЯ ПУСКА БОЕВЫХ СРЕДСТВ С БОРТА ПОДВОДНОЙ ЛОДКИ | 2009 |
|
RU2494003C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| CN 107089316 A, 25.08.2017 | |||
| US 5407150 A1, 18.04.1995 | |||
| ПАТРУЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2389639C2 |

