Изобретение относится к корабельным ракетно-авиационным комплексам с опционально и дистанционно пилотируемыми конвертируемыми самолетами, имеющими ромбовидное крыло и в кормовой части фюзеляжа комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими, смонтированные в крыльевых кольцевых обтекателях наплывов крыла два поперечных несущих винта (НВ) и/или в кольцевых обтекателях крыльевых гондол два выносных турбовентилятора, создающих подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными НВ в конфигурации турбовинтовентиляторных самолетов, используемых с управляемыми ракетами и палубы атомного авианесущего ледокола.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Известен самолет вертикального взлета и посадки (СВВП) модели F-35B (США) с трапециевидным крылом и на нем боковыми соплами, создающими вертикальную тягу и управление по крену, имеет турбореактивный двухконтурный двигатель (ТРДД) с отклоняемым вектором тяги (ОВТ) его реактивного сопла и отбором мощности на привод подъемного вентилятора с рулевыми створками и двухкилевое оперение.
Причины, препятствующие поставленной задаче: первая - это то, что заднее расположение ТРДД с его поворотным соплом, изменяющим вектор реактивной тяги, имеет для отбора взлетной его мощности передний вывод вала посредством редуктора и муфты сцепления на подъемный вентилятор, что предопределяет за кабиной пилота в конструкции фюзеляжа две верхнюю и нижнюю раскрываемые створки подъемного вентилятора, оснащенного также сложной системой отклонения его воздушного потока в продольном направлении, что усложняет конструкцию. Вторая - это то, что размещение за кабиной пилота подъемного вентилятора диаметром 1,27 м предопределяет большую площадь миделя фюзеляжа, что создает дополнительное лобовое сопротивление. Третья - это то, что для выполнения ВВП и зависания имеется двойная система создания вертикальной как горячей тяги от поворотного сопла ТРДД, предопределяющего термостойкое исполнение палубы корабля, так и холодной тяги от подъемного вентилятора и боковых сопел, которые при горизонтальном его полете, увеличивая паразитную массу, бесполезны, что ведет к утяжелению конструкции и уменьшению весовой отдачи. Кроме того, использование форсажного и бесфорсажного режимов работы ТРДД соответственно повышает удельный расход топлива на 46%, уменьшает вдвое дальность полета и ограничивает скорость не более 950 км/ч.
Наиболее близким к предлагаемому изобретению является британский [см. http: //rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] противолодочный авиационный комплекс (ПАК) модели "Icara" с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (YP), двигатель силовой установки (СУ) и бортовую систему управления (БСУ).
Признаки, совпадающие - БЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет противолодочную торпеду типа Мк.44, имеющую при ее массе 196 кг дальность хода 5 км. БЛА с торпедой Мк.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность полета до 24 км и скорость до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположении цели поступали от гидроакустической системы надводного корабля-носителя, другого корабля или противолодочного вертолета. Что обеспечивает, учитывая противоздушную оборону (ПВО) цели, постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, передающей их в полете через БСУ на БЛА. По прибытии БЛА в район нахождения цели торпеда Мк.44, полуутопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БЛА продолжает полет с работающей СУ, уводя его от места приводнения самонаводящейся торпеды, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном британском ПАК модели "Icara" увеличения целевой нагрузки (ЦН) и весовой отдачи, повышения скорости и дальности полета, а также вероятности поражения надводной или наземной цели, расположенной на большой дальности, но и возврата на вертолетную площадку атомного авианесущего ледокола (АНЛ) для повторного использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного ПАК модели "Icara", наиболее близкого к нему, являются наличие того, что ударный ракетный комплекс авиационный (УРКА) имеет группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем один опционально пилотируемый конвертируемый самолет (ОПКС) с более чем одним дистанционно пилотируемым конвертируемым самолетом (ДПКС), используемую более чем с одной вертолетной площадки АНЛ, причем каждый палубный ДПКС и ОПКС содержит ромбовидное крыло (РВК), имеющее двухвинтовую поперечно-несущую систему (ДПНС), используемую на переходных и разгонных режимах полета, выполнении ВВП и зависания, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), включающую с изменяемым шагом левый и правый трех- или четырехлопастных несущих винта (НВ), которые смонтированы внутри РВК в соответствующих крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные нижние жалюзи-рули и продольные верхние полукруглые створки или жалюзи-створки, обеспечивающие свободный доступ воздуха в ККО и выхода из них воздушного потока, образующие после их закрывания соответствующие поверхности РВК, интегрированного с его передними и задними корневыми наплывами (ПКН и ЗКН) и по правилу площадей с фюзеляжем, снабженным в кормовой его части по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), выполненными в виде двухконтурных реактивных двигателей, имеющих выносные трехступенчатые вентиляторы (ВТВ) в кольцевых обтекателях (КО) крыльевых гондол, смонтированных вдоль продольных осей ККО в задней части РВК и с внешних бортов хвостовых балок с их реактивными круглыми или прямоугольными плоскими соплами (ППС), вынесенными за заднюю кромку ЗКН, обеспечивающими создание вертикальной/наклонной или горизонтальной тяги при выполнении ВВП/КВП или поступательного полета соответственно, но и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ в их ККО и/или ВТВ в КО, создающие в при этом пропульсивно-реактивной системе (ПРС) синхронную реактивную холодную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с его КГтД, приводящими в ДПНС-Х2 пару НВ и/или два ВТВ в ПРС-R2, создающие при этом подъемную и/или подъемную/маршевую тягу с работающими/зафиксированными НВ при автоматически открытых/закрытых верхних и нижних, например, жалюзи-створках их ККО в реактивный сверх- или трансзвуковой самолет соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом концевые части низко- или среднерасположенного РВК выполнены как складывающимися вверх на стоянке для уменьшения в 1,5…1,7 раза стояночной их площади от взлетной, так и отклоненными соответственно вверх или вниз на угол 12° так, что передняя кромка консолей РВК размещена в плане параллельно соответствующей кромке односторонних трапециевидных цельно-поворотных килей, смонтированных сверху крыльевых гондол, размещенных под углом 40° по отношению к плоскости симметрии, отклонены наружу или вовнутрь, причем при выполнении ВВП и зависания вертикальные силы приложения от двух ППС и двух НВ, равноудаленных в плане от оси симметрии, размещены на поперечных линиях, вынесенных в плане от центра масс соответственно назад и вперед по полету на расстоянии обратно пропорционально их подъемным тягам.
Кроме того, в сверхманевренных ОПКС и ДПКС их система трансмиссии, например, с двумя ее упомянутыми КГтД, смонтированными между хвостовых балок в кормовых гондолах фюзеляжа, в которых спереди их упомянутых ССТ размещен Т-образный в плане главный редуктор, имеющий продольные входные валы, например, от двух пар каскада ССТ, но и соответствующие выходные поперечные валы, которые вращательно связаны с соответствующим Т-образным в плане крыльевым редуктором, продольные передний и задний выходные валы которого передают распределенную мощность соответственно на угловые редукторы упомянутых правого и левого НВ (ПНВ и ЛНВ) и/или на редуктор ВТВ в КО крыльевых гондол, имеющих на их входе конусообразные обтекатели крыльевых редукторов, экранирующие лопатки ВТВ и обеспечивающие отведение пограничного слоя и повышение коэффициента восстановления полного давления без щели для слива пограничного слоя, но и сжимающие воздушный поток и формирующие коническое его течение, а на режимах их ВВП и зависания продольное управление осуществляется посредством изменения равновеликого шага в паре ПНВ и ЛНВ, поперечное управление - изменением разновеликого шага и в ПНВ, и в ЛНВ, путевое управление- упомянутыми жалюзи-рулями в упомянутых левом и правом их ККО, которые выполнены с возможностью дифференциального их отклонения от центра ККО на углы вперед по полету -40° и назад +40°, а на их режимах ВВП и зависания при удельной нагрузке на мощность их комбинированной СУ, составляющей ρΝ=1,15 кг/л.с, каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ССТ в их КГтДГ оснащенную последовательно соединенными блоком приведения давления в компрессоре их ССТ, блоком формирования заданного значения частоты вращения и углового положения лопаток их ССТ и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ССТ и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ДПНС-Х2, составляющей с учетом потерь от обдува ребер жесткости ККО ρВТ=1,15, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе 3/4 и 1/4от потребной ее мощности на привод упомянутых НВ и ВТВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и соответствующим перераспределением оставшейся мощности между НВ и ВТВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в ДПНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения их фюзеляжа и дисков вращения их НВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их упомянутой БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их фюзеляжа с колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, при этом каждый тяжеловооруженный ДПКС и ОПКС, выполненный соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПКС и возможностью опционального его управления пилотами из кабины фюзеляжа, а их фюзеляж для внутреннего вооружения имеют автоматические одно- и двухстворчатые соответствующие боковые и нижние отсеки, упомянутые ПУ которых с закрепленными на них УР воздух-воздух типа Р-77 и стратегическими крылатыми ракетами (СКР), обеспечивающими борьбу с воздушной и наземной, надводной целью, смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а их планер выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, и из алюминиево-литиевых сплавов и композиционных материалов, армированных углеродным волокном, способным защитить их бортовое оборудование от мощных электромагнитных вспышек или воздействия лазерного излучения, имеет носовую и кормовую части фюзеляжа и в его середине включает два композитных монолитных S-образных впускных канала и жесткие балки внутри центроплана и трапециевидных внутренних секций РВК, усиленных лонжеронами и ребрами жесткости с общей композитной обшивкой РВК и содержит трехопорное колесное шасси с носовой и главными стойками, убирающимися соответственно в отсеки фюзеляжа и крыльевых гондол, а их левый и правый надфюзеляжные воздухозаборники, не имеющие пластинчатых отсекателей пограничного слоя и внутренних подвижных регулирующих элементов, выполнены как для экранирование лопаток упомянутых ССТ с двойной S-образностью при виде сбоку и сверху, так и отведения пограничного слоя и повышения коэффициента восстановления полного давления без щели для слива пограничного слоя, но и включают рампы, сжимающие поток и формирующие коническое его течение, причем малозаметные ДПКС\ОПКС для создания буферной безопасной авиа-зоны между упомянутым АНЛ и ПВО цели, несущие в бомбоотсеках их фюзеляжа по 2\1+1 СКР, увеличивают после выполнения ими технологии ВВП/КВВП соответственно дальность действия до 6020/8155\8020/10155+6020/8155 км СКР типа Х-555\Х-101+Х-555, образующих после их запуска автономные рои СКР с буксируемыми ложными их целями, а их фюзеляж имеет от пирамидальной носовой его части скошенные по всей его длине боковые стороны, образующие при виде спереди пяти- или шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, а каждое упомянутое ППС их крыльевых гондол для управления вектором тяги (УВТ) снабжено верхней 27 и нижней 28 стенками, содержащими на их концах прямоугольные в плане люки-сопла с поперечными верхней 29 и нижней 30 поворотными на их осях 31 и 32 в вертикальной плоскости створками, имеющими от осей их поворота длину с их фасками, определяемую из соотношения: Lств=hсоп/0,707, м (где: hсоп - высота сопла, cos 45°=0,707) и раздельные приводы, обеспечивающие между боковых его стенок 33-34 их отклонение к продольной оси сопла вниз и вверх синхронно двумя на углы ±22,5°, смыкаясь их фасками, либо одной из них на углы ±22,5° при закрытой другой синфазно или дифференциально соответственно для реверса тяги либо для продольного или поперечного управления либо только нижней створки 30 на угол +45° до соприкосновения ее фаски с поверхностью верхней закрытой створки 29 для изменения направления горизонтальной тяги на вертикальную, а их фюзеляж между упомянутых КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, при этом электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается сверху носовой части фюзеляжа головного ОПКС, снабженного двухчастотной бортовой радиолокационной станцией (РЛС) с активной фазированной антенной решеткой (АФАР), которая с ЭОД на безопасных для ОПКС расстояниях обеспечивает геолокацию цели и управление оружейными нагрузками ОПКС и по лазерному каналу связи ДПКС с наведением на цель их СКР и УР класса воздух-воздух в составе авиагруппы, применяемой совместно с рядом других авиагрупп, способных и обмениваться информацией между их головными ОПКС в рамках их единого так называемого информационного облака, и динамически адаптироваться к изменяющимся условиям, включая как и то, что если одна из авиагрупп обнаруживает цели в количестве большем, чем может поразить, то по лазерному каналу связи ее ОПКС передает целеуказание на ряд ОПКС, не использующие свои РЛС в составе других авиагрупп, и они совместно атакуют цели, так и их тактическое управление и координацию, распределяющую по выбранным целям и ОПКС, и ДПКС ряда авиагрупп и/или полностью, повышая эффективность их атаки, интегрированы к автономному стратегическому их роению, причем компьютер системы ЭОД связан с центральным бортовым компьютером ОПКС быстродействующим оптоволоконным интерфейсом, обеспечивающим полную интеграцию общей информационной системы ОПКС с системой ЭОД, включающей в ее состав среднедиапазонный инфракрасный сенсор, который, представляя собой тепловизор, лазер и камеру с ПЗС-матрицей, позволяет выполнять фото и видео съемку с большим разрешением, автоматическое слежение за целью, поиск в инфракрасном диапазоне, лазерную подсветку цели, измерение дальности с помощью лазера, и отслеживание лазерных меток, поставленных другими системами слежения и наведения, при этом в каждой авиагруппе управление каждым ДПКС по лазерному каналу закрытой связи, не подверженному помехам со стороны радиоэлектронной борьбы (РЭБ) противника, обеспечивается вторым пилотом ОПКС, используя систему его самообороны и противодействия РЭБ противника - станцию активных электронных помех, а также компактные твердотельные лазерные и микроволновые установки направленной энергии, применяемые в качестве самообороны и сопутствующего вооружения воздушного базирования, подавляющие головки самонаведения УР противника и выводящие из строя электронику противника соответственно, причем в каждой авиагруппе каждый ОПКС на передней и задней кромках соответственно упомянутых РВК с ПКН и ЗКН вплоть до концевых частей РВК смонтированы РЛС с конформной активной решеткой и лазерные локаторы, которые используются для отслеживания соответствующих воздушных и наземных целей, в то время как его РЛС с АФАР используется для обеспечен наземных стратегических целей, таких как базы и инфраструктура, при этом атомный АНЛ имеющий асимметричный корпус, выполнен с двухосадочной его схемой, позволяющей использовать осадку в диапазоне от 8,5 до 10,5 м для увеличения ледопроходимости и выполнения специальных задач на мелководье и устье рек, снабженный движительным комплексом, состоящим из пары основных и пары дополнительных соответственно кормовых и носовых винто-рулевых колонок (ВРК), каждая из которых, работая независимо и повышая эффективность маневрирования в любом направлении и даже вращения на месте, может как поворачиваться в горизонтальной плоскости на 360°, так и оснащена встроенным высокомоментным электродвигателем постоянного тока с соответствующим гребным винтом фиксированного шага (ВФШ), смонтированным непосредственно на валу внутри гондолы полноповоротной ВРК, причем установка носовых ВРК на атомном АНЛ обеспечивает высокую маневренность в ледовых условиях, но и на чистой воде, что очень важно в зонах с ограниченным водным пространством, но и, достигая эффекта размывания льда работой этих ВФШ как снижает прочность льда и повышает способность прохождения торосов, так и оказывает вредное воздействие на работу кормовых ВРК, при этом для повышения эффективности пропульсивной установки атомного АНЛ пара носовых ВРК, которые, обеспечивая эффект расхождения векторов их тяги от продольной оси АНЛ, развернуты под углом друг к другу на эффективный упор АНЛ в режиме создания тягового усилия, причем пропульсивная установка с четырьмя ВРК и четырьмя джойстиками управления объединены в одном мостике с установкой двух навигационных мостиков- основного и дублирующего для управления АНЛ во время хода и визуального контроля, улучшающего со второго мостика панорамный обзор при его движении косым ходом.
Кроме того, каждый турбовинтовентиляторный ОПКС и ДПКС с холодными потоками воздуха от НВ в ДПНС-Х2 при ВВП и реактивной струи сжатого воздуха в ПРС-R2 при крейсерском полете с маршевой тяговоуроженностью первого уровня - 0,225 или второго - 0,258 либо третьего уровня - 0,5 или четвертого - 0,62, используя соответственно 22% или 27% либо 72% или 100% мощности их СУ, обеспечивает на высоте 15 км скорость 0,894 Маха (М) или М=0,988 либо транс- или сверхзвуковую скорость М=0,996 или М=1,4 с упомянутым РВК, имеющим с его ПКН от V-образной в плане носовой части фюзеляжа переменную стреловидность, а каждый их КГтД снабжен его реактивным прямоугольным плоским соплом с термопоглощающим покрытием, уменьшая инфракрасное (ИК) излучение, имеет заднюю V-образную в плане кромку, размещенную в продолжение или параллельно задней кромке упомянутого РВК, образующую с конусообразным кормовым обтекателем и задней кромкой РВК пилообразную стреловидность, но и форсажную камеру, используемую на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутыми ССТ и задними перед форсажной камерой открытыми управляемыми створками упомянутой его кормовой гондолы для дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговоуроженность их СУ с 0,62/0,5 до 0,78/0,63, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов ОПКС позволит увеличить жесткость фюзеляжа, снизить толщину обшивки и уменьшить массу, причем планер ОПКС с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный броне-фонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих всепогодную сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом для управления ОПКС в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видны на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
Благодаря наличию этих признаков, которые позволят освоить арктический УРКА, имеющий группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем один опционально пилотируемый конвертируемый самолет (ОПКС) с более чем одним дистанционно пилотируемым конвертируемым самолетом (ДПКС), используемую более чем с одной вертолетной площадки АНЛ, причем каждый палубный ДПКС и ОПКС содержит ромбовидное крыло (РВК), имеющее двухвинтовую поперечно-несущую систему (ДПНС), используемую на переходных и разгонных режимах полета, выполнении ВВП и зависания, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), включающую с изменяемым шагом левый и правый трех- или четырехлопастных несущих винта (НВ), которые смонтированы внутри РВК в соответствующих крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные нижние жалюзи-рули и продольные верхние полукруглые створки или жалюзи-створки, обеспечивающие свободный доступ воздуха в ККО и выхода из них воздушного потока, образующие после их закрывания соответствующие поверхности РВК, интегрированного с его передними и задними корневыми наплывами (ПКН и ЗКН) и по правилу площадей с фюзеляжем, снабженным в кормовой его части по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), выполненными в виде двухконтурных реактивных двигателей, имеющих выносные трехступенчатые вентиляторы (ВТВ) в кольцевых обтекателях (КО) крыльевых гондол, смонтированных вдоль продольных осей ККО в задней части РВК и с внешних бортов хвостовых балок с их реактивными круглыми или прямоугольными плоскими соплами (ППС), вынесенными за заднюю кромку ЗКН, обеспечивающими создание вертикальной/наклонной или горизонтальной тяги при выполнении ВВП/КВП или поступательного полета соответственно, но и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ в их ККО и/или ВТВ в КО, создающие в при этом пропульсивно-реактивной системе (ПРС) синхронную реактивную холодную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с его КГтД, приводящими в ДПНС-Х2 пару НВ и/или два ВТВ в ПРС-R2, создающие при этом подъемную и/или подъемную/маршевую тягу с работающими/зафиксированными НВ при автоматически открытых/закрытых верхних и нижних, например, жалюзи-створках их ККО в реактивный сверх- или трансзвуковой самолет соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом концевые части низко- или среднерасположенного РВК выполнены как складывающимися вверх на стоянке для уменьшения в 1,5…1,7 раза стояночной их площади от взлетной, так и отклоненными соответственно вверх или вниз на угол 12° так, что передняя кромка консолей РВК размещена в плане параллельно соответствующей кромке односторонних трапециевидных цельно-поворотных килей, смонтированных сверху крыльевых гондол, размещенных под углом 40° по отношению к плоскости симметрии, отклонены наружу или вовнутрь, причем при выполнении ВВП и зависания вертикальные силы приложения от двух ППС и двух НВ, равноудаленных в плане от оси симметрии, размещены на поперечных линиях, вынесенных в плане от центра масс соответственно назад и вперед по полету на расстоянии обратно пропорционально их подъемным тягам. Все это позволит в турбовинтовентиляторных ОПКС и ДПКС упростить управляемость и обеспечить ее стабильность. Размещение НВ в ККО РВК вблизи центра масс обеспечивает предсказуемость и стабильность управления при ВВП, а выполнение НВ с изменяемым шагом позволит упростить управление ОПКС, выполненного без застекленной поверхности окон кабины пилотов, содержащей средства отображения цифрового изображения на дисплеях кабины или на нашлемных дисплеях пилотов. В случае отказа в СУ одной из ССТ на режиме зависания ее КГтД выполнены с автоматическим выравниванием и равным перераспределением оставшейся мощности каскада ССТ между НВ, что повышает безопасность полетов. Использование РВК с ПКН и ЗКН позволит в трапециевидных внутренних его секциях с относительной толщиной профиля 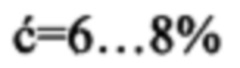 разместить пару ККО с их двумя НВ, повысить аэродинамическое качество до 14 единиц, достичь на высоте полета 15 км транс- и сверхзвуковой скорости 1058 км/ч и 1478/1807 км/ч на безфорсажных/форсажных режимах работы КГтД.
разместить пару ККО с их двумя НВ, повысить аэродинамическое качество до 14 единиц, достичь на высоте полета 15 км транс- и сверхзвуковой скорости 1058 км/ч и 1478/1807 км/ч на безфорсажных/форсажных режимах работы КГтД.
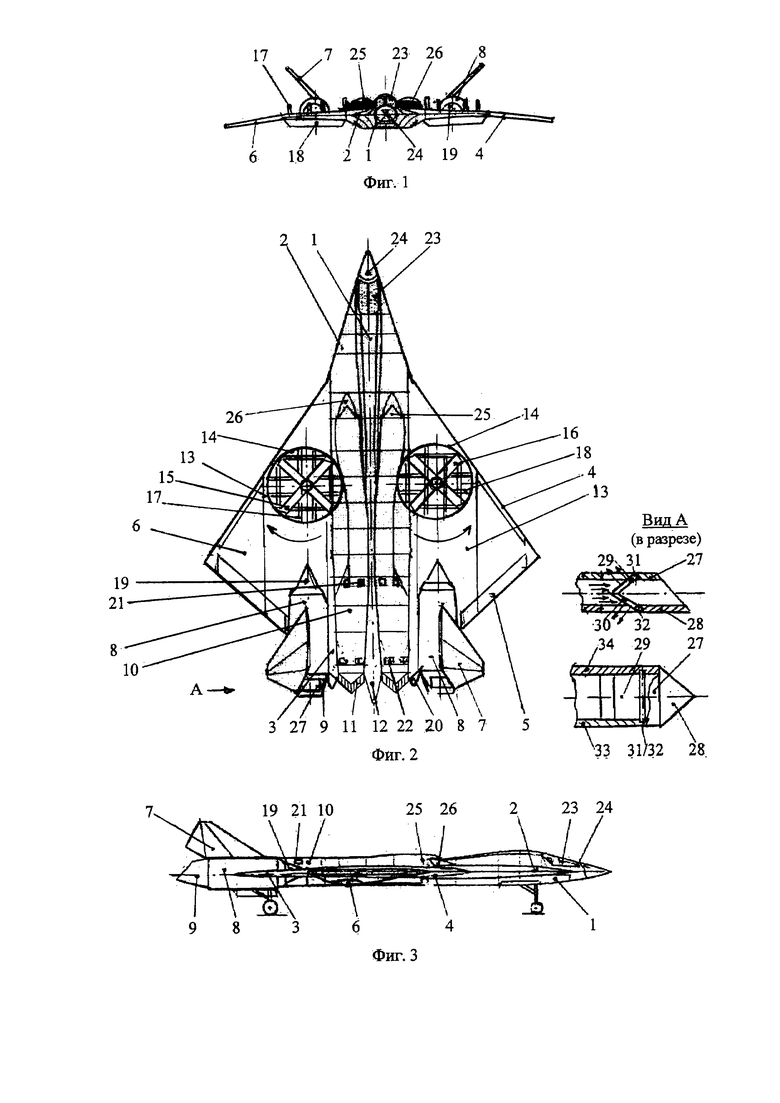
Предлагаемое изобретение, стратегического УРКА с турбовинтовентиляторными ОПКС и ДПКС, содержащими РВК с ПКН и ЗКН, два КГтД, приводящих ПНВ и ЛНВ в ДПНС-Х2 и/или в ПРС-R2 два ВТВ в КО крыльевых гондол, имеющих сверху цельно-поворотные кили, отклоненные наружу от плоскости симметрии, иллюстрируется одним ОПКС на общих видах спереди/сверху и сбоку соответственно фиг. 1/2 и фиг. 3:
фиг. 1/2 в конфигурации самолета КВП или ВВП с двумя КГтД, приводящими НВ с ВТВ в ПРС-R2 или НВ, и РВК с его механизацией, показанным при открытых продольных верхних жалюзи-створках/поперечных нижних жалюзи-рулях в их ККО;
фиг. 3 в конфигурации транс-/сверхзвукового самолета с закрытыми жалюзи-створками в ККО его РВК, концевые части которого отклонены вниз под углом к горизонтали ϕ=12° и двумя ППС 9 с ВУВТ в крыльевых их гондолах.
Арктический УРКА представлен на фиг. 1-3 одним ОПКС, который выполнен по концепции ДПНС-Х2 и ПРС-R2, содержит фюзеляж 1 и РВК, имеющее ПКН 2 и ЗКН 3, но и предкрылки 4 и закрылки 5 на концевых его частях 6. Концевые части 6 среднерасположенного РВК, смонтированного с фюзеляжем 1 по правилу площадей, отклонены вниз на угол 12° и наравне с трапециевидными цельно-поворотными килями 7, установленными сверху крыльевых гондол 8, отклоненными наружу от плоскости симметрии (см. фиг. 1), повышают путевую устойчивость, особенно, при скорости полета М=0,8…1,4. Крыльевые гондолы 8, смонтированные в задней части РВК, содержат ППС 9 с системой ВУВТ, вынесены за заднюю кромку ЗКН 3. Фюзеляж 1 содержит кормовые гондолы 10 их КГтД и между их реактивных плоских сопел 11 имеет кормовой обтекатель 12 с отсеком, снабженным на его конце выдвижной буксируемой на тросе ложной целью, но и колесное убирающееся в отсеки фюзеляжа 1 и крыльевых гондол 8 трехопорное шасси и надфюзеляжные воздухозаборники с S-образными воздуховодами, экранирующими лопатки ССТ (на фиг. 1-3 не показаны). Внутренние трапециевидные секции 13 РВК содержат левый и правый ККО 14 с поперечными ЛНВ 15 и ПНВ 16 в ДПНС-Х2. Каждый ККО 14 снабжен продольными верхними 17 жалюзи-створками и поперечными нижними жалюзи-рулями 18, организующими после закрытия соответствующие поверхности РВК. Два КГтД в комбинированной СУ содержат каскад ССТ, имеющих передний вывод вала для отбора мощности и ее передачи на Т-образный в плане главный редуктор с поперечным выходными валами, передающими крутящий момент на Т-образные в плане крыльевые редукторы, продольные передний и задний выходные валы которого передают мощность соответственно через муфты сцепления на угловые редукторы (на фиг. 1-3 не показаны) НВ 15-16 и/или на редуктор ВТВ в КО крыльевых гондол 8, имеющих на их входе конусообразные обтекатели 19 крыльевых редукторов. При этом взлетная мощность СУ перераспределяется как 3/4 и 1/4 между парой НВ 15-16 и двух ВТВ с ППС 9 в крыльевых гондолах 8, так и 22% или 27%, но и 100% между двух ВТВ в КО крыльевых гондол 8 соответственно при выполнении как ВВП и зависания, так и высокоскоростного или транс-, но и сверхзвукового полета. Кормовые гондолы 10 с их КГтД, смонтированы между хвостовых балок 20, снабжены реактивными прямоугольными плоскими соплами 11 и форсажными камерами, но и передними 21 перед каскадом их ССТ и задними 22 перед форсажной камерой управляемыми створками.
Управление сверхманевренным ОПКС обеспечивается из двухместной без застекленной поверхности кабины 23, а целеуказание - его радаром с АФАР и ЭОД 24 (см. фиг. 3). При полете как самолета со скоростями М=0,5…М=1,7 подъемная сила создается РВК при закрытых жалюзи-створках/рулях 17/19 в ККО 14 (см. фиг. 2), маршевая реактивная тяга - системой ПРС-R2 через ППС 9 с ВУВТ в крыльевых гондолах 8, на режиме перехода - РВК с НВ 15-16. После создания подъемной тяги НВ 15-16 обеспечиваются режимы ВВП и зависания или КВП при создании ППС 9 с ВУВТ требуемой наклонно-маршевой тяги для разгонного полета (см. фиг. 1). При выполнении ВВП и зависания продольное управление осуществляется посредством изменения равновеликого шага в паре НВ 15-16, поперечное управление - изменением разновеликого шага и в ЛНВ 15, и в ПНВ 16, путевое управление- нижними жалюзи-рулями 19 их ККО 14, которые выполнены с возможностью дифференциального их отклонения от центра ККО на углы вперед по полету -40° и назад +40°. После вертикального взлета и набора высоты выполняется переходный маневр и осуществляется перераспределение мощности с привода НВ 15-16 на привод двух ВТВ их крыльевых гондол 8. По мере разгона ОПКС и с ростом подъемной силы его РВК подъемная сила уменьшается на двух НВ 15-16, которые останавливаются и фиксируются (см. фиг. 2) при синхронно закрытых жалюзи-створках/рулях 17/18 в ККО 14. При достижении скоростей М=0,5 и М=0,5…М=0,8 обеспечиваются переходные и разгонные режимы полета (см. фиг. 3). Каждый надфюзеляжный воздухозаборник 25 выполнен без пластинчатого отсекателя пограничного слоя и состоит из рампы 26, сжимающей поток и формирующей коническое его течение. Каждое ППС 9 выполнено с верхней 27 и нижней 28 стенками, имеющими на их концах прямоугольные в плане люки-сопла с поперечными верхней 29 и нижней 30 поворотными на их осях 31 и 32 в вертикальной плоскости створками, имеющими раздельные приводы, обеспечивающие их отклонение к продольной оси сопла и между боковых его стенок 33-34 соответственно вниз и вверх синхронно двумя на углы ±22,5° либо одной из них на углы ±22,5° синфазно или дифференциально при закрытой другой (см. фиг. 2 вид А, при реверсе). Изменение балансировки по курсу, тангажу или крену обеспечивается отклонением соответственно синхронным цельно-поворотных килей 10 синфазным или дифференциальным верхних 29 и нижних 30 створок ППС 9 крыльевых гондол 8 (см. фиг. 2).
Таким образом, малозаметные ОПКС и ДПКС с двумя КГтД, приводящими для создания вертикальной тяги НВ или горизонтальной тяги ВТВ с работающими или зафиксированными НВ в их ККО, представляют собой турбовинтовентиляторные СВВП с холодными потоками воздуха от НВ в ДПНС-Х2 и ППС при ВВП и реактивной струи сжатого воздуха в ПРС-R2 при крейсерском полете. Вместо традиционной конструкции полужесткого цельнометаллического планера СВВП, включающего более 3300 оригинальных деталей, палубные ОПКС и ДПКС содержат монолитную конструкцию жесткого их корпуса с использованием до 62…66% улучшенных по структурному старению углеродных композитов, способных выдерживать значительные количества тепла и деформации, позволяющие снизить на порядок количество деталей, но и затраты на производство и их сборку. Из них головной ОПКС полностью оцифрован и включает с использованием лазерного канала связи так называемое manned and unmanned teaming (MUM-T). Четвертый уровень MUM-T позволяет оснастить БСУ головного ОПКС двухчастотной бортовой РЛС с АФАР, которая с ЭОД на безопасных для него расстояниях обеспечивает геолокацию малозаметной цели и управление оружейными нагрузками и ОПКС, и по лазерному каналу связи ДПКС с наведением на цель их СКР и УР класса воздух-воздух в составе авиагруппы, применяемой совместно с рядом других авиагрупп, способных и обмениваться информацией между их головными ОПКС в рамках их единого так называемого информационного облака и передает целеуказание на ряд ОПКС, не использующие свои РЛС в других УРКА. При выполнении технологии ВВП, например, турбовинтовентиляторный ДПКС-2,9 использует взлетную мощность 17000 л.с. его СУ, что в 3,75 раза меньше, чем у сопоставимого реактивного СВВП модели Як-141 с взлетным весом 15800 кг и составной его СУ, потребляющей мощность 63950 л.с. от подъемно-маршевого ТРДД модели Р-179-300 и двух подъемных ТРД модели РД-41, смонтированных за кабиной пилота в двигательном отсеке, что уменьшает полезный объем фюзеляжа на 1,97 м3, увеличивает паразитную массу при крейсерском полете и предопределяет термостойкое исполнение палубы авианесущего корабля. Причем палубные ОПКС-4,15, используя технологии ВВП/КВВП, увеличат соответственно до 8020/10155 км дальность полета СКР типа Х-102 с Х-555. После запуска СКР типа Х-102 с Х-555, которые образуют автономные рои с буксируемыми ложными их целями, повышающими поражающую возможность и боевую устойчивость атомного АНЛ в составе ударного УРКА.
Стратегический УРКА с палубными (см. табл.1) ДПКС-3,5/ОПКС-4,15, несущими по 2/2 СКР типа Х-555/Х-101 с Х-555, позволят пилотам ОПКС управлять оружейными нагрузками ОПКС и ДПКС, но и их навигацией и глобальным позиционированием с созданием безопасной авиазоны между ПВО цели и атомного АНЛ, освоенного на базе двухосадочной схемы ледокола проекта 22220, используемого с устья рек Сибири. Последнее и создание для арктического УРКА тяжеловооруженных ДПКС-4,15, используемых при сверхзвуковой скорости их полета противокорабельные ракеты (ПКР) типа Х-47М2 «Кинжал», позволят увеличить при выполнении ими технологии ВВП/КВВП дальность полета гиперзвуковой ПКР с 500 км до 2400/4300 км, а также повысить скрытность, боевую устойчивость и поражающую возможность кораблей-носителей морской системы ПРО «Иджис» в Северных морских регионах.
Изобретение относится к корабельным авиационно-ракетным системам. Ударный ракетный комплекс авиационный (УРКА) содержит авианесущий ледокол (АНЛ) с реактивными беспилотными летательными аппаратами, имеющими крыло, фюзеляж с пусковым устройством управляемой ракеты (УР), двигатель силовой установки и бортовую систему управления. УРКА включает опционально и дистанционно пилотируемые конвертируемые самолеты, имеющие ромбовидное крыло и в кормовой части фюзеляжа комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими смонтированные в крыльевых кольцевых обтекателях наплывов крыла два поперечных несущих винта (НВ) и/или в кольцевых обтекателях крыльевых гондол два выносных турбовентилятора, создающих подъемную и/или пропульсивно-реактивную тягу с работающими/зафиксированными НВ в конфигурации турбовинтовентиляторных самолетов, используемых с управляемыми ракетами и палубы атомного АНЛ. Изобретение направлено на повышение вероятности поражения надводной или наземной цели. 2 з.п. ф-лы, 3 ил., 1 табл.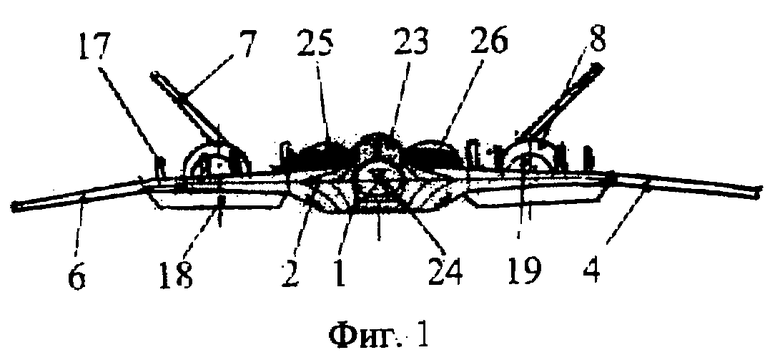
1. Ударный ракетный комплекс авиационный (УРКА), содержащий авианесущий ледокол (АНЛ) с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и для управления с командного пункта АНЛ бортовую систему управления (БСУ), отличающийся тем, что он имеет группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем один опционально пилотируемый конвертируемый самолет (ОПКС) с более чем одним дистанционно пилотируемым конвертируемым самолетом (ДПКС), используемую более чем с одной вертолетной площадки АНЛ, причем каждый палубный ДПКС и ОПКС содержит ромбовидное крыло (РВК), имеющее двухвинтовую поперечно-несущую систему (ДПНС), используемую на переходных и разгонных режимах полета, выполнении ВВП и зависания, короткого взлета и посадки или вертикальной посадки (КВП или КВВП), включающую с изменяемым шагом левый и правый трех- или четырехлопастных несущих винта (НВ), которые смонтированы внутри РВК в соответствующих крыльевых кольцевых обтекателях (ККО), имеющих автоматически открываемые/закрываемые поперечные нижние жалюзи-рули и продольные верхние полукруглые створки или жалюзи-створки, обеспечивающие свободный доступ воздуха в ККО и выхода из них воздушного потока, образующие после их закрывания соответствующие поверхности РВК, интегрированного с его передними и задними корневыми наплывами (ПКН и ЗКН) и по правилу площадей с фюзеляжем, снабженным в кормовой его части по меньшей мере двумя комбинированными газотурбинными двигателями (КГтД), выполненными в виде двухконтурных реактивных двигателей, имеющих выносные трехступенчатые вентиляторы (ВТВ) в кольцевых обтекателях (КО) крыльевых гондол, смонтированных вдоль продольных осей ККО в задней части РВК и с внешних бортов хвостовых балок с их реактивными круглыми или прямоугольными плоскими соплами (ППС), вынесенными за заднюю кромку ЗКН, обеспечивающими создание вертикальной/наклонной или горизонтальной тяги при выполнении ВВП/КВП или поступательного полета соответственно, но и более чем одну свободную силовую турбину (ССТ), передающую взлетную мощность СУ на соответствующие НВ в их ККО и/или ВТВ в КО, создающие при этом в пропульсивно-реактивной системе (ПРС) синхронную реактивную холодную тягу, но и выполнен с возможностью преобразования полетной его конфигурации после выполнения вертикального или короткого взлета с соответствующего самолета с его КГтД, приводящими в ДПНС-Х2 пару НВ и/или два ВТВ в ПРС-R2, создающие при этом подъемную и/или подъемную/маршевую тягу с работающими/зафиксированными НВ при автоматически открытых/закрытых верхних и нижних, например, жалюзи-створках их ККО в реактивный сверх- или трансзвуковой самолет соответственно при нормальном или максимальном взлетном весе, но и обратно, при этом концевые части низко- или среднерасположенного РВК выполнены как складывающимися вверх на стоянке для уменьшения в 1,5÷1,7 раза стояночной их площади от взлетной, так и отклоненными соответственно вверх или вниз на угол 12° так, что передняя кромка консолей РВК размещена в плане параллельно соответствующей кромке односторонних трапециевидных цельно-поворотных килей, смонтированных сверху крыльевых гондол, размещенных под углом 40° по отношению к плоскости симметрии, отклонены наружу или вовнутрь, причем при выполнении ВВП и зависания вертикальные силы приложения от двух ППС и двух НВ, равноудаленных в плане от оси симметрии, размещены на поперечных линиях, вынесенных в плане от центра масс соответственно назад и вперед по полету на расстоянии обратно пропорционально их подъемным тягам.
2. УРКА по п. 1, отличающийся тем, что в сверхманевренных ОПКС и ДПКС их система трансмиссии, например, с двумя ее упомянутыми КГтД, смонтированными между хвостовых балок в кормовых гондолах фюзеляжа, в которых спереди их упомянутых ССТ размещен Т-образный в плане главный редуктор, имеющий продольные входные валы, например, от двух пар каскада ССТ, но и соответствующие выходные поперечные валы, которые вращательно связаны с соответствующим Т-образным в плане крыльевым редуктором, продольные передний и задний выходные валы которого передают распределенную мощность соответственно на угловые редукторы упомянутых правого и левого НВ (ПНВ и ЛНВ) и/или на редуктор ВТВ в КО крыльевых гондол, имеющих на их входе конусообразные обтекатели крыльевых редукторов, экранирующие лопатки ВТВ и обеспечивающие отведение пограничного слоя и повышение коэффициента восстановления полного давления без щели для слива пограничного слоя, но и сжимающие воздушный поток и формирующие коническое его течение, а на режимах их ВВП и зависания продольное управление осуществляется посредством изменения равновеликого шага в паре ПНВ и ЛНВ, поперечное управление - изменением разновеликого шага и в ПНВ, и в ЛНВ, путевое управление - упомянутыми жалюзи-рулями в упомянутых левом и правом их ККО, которые выполнены с возможностью дифференциального их отклонения от центра ККО на углы вперед по полету -40° и назад +40°, а на их режимах ВВП и зависания при удельной нагрузке на мощность их комбинированной СУ, составляющей ρN=1,15 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ССТ в их КГтД, оснащенную последовательно соединенными блоком приведения давления в компрессоре их ССТ, блоком формирования заданного значения частоты вращения и углового положения лопаток их ССТ и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ССТ и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в ДПНС-Х2, составляющей с учетом потерь от обдува ребер жесткости ККО ρВТ=1,15, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе 3/4 и 1/4 от потребной ее мощности на привод упомянутых НВ и ВТВ соответственно как от четырех работающих ССТ, так и от трех из работающих ССТ с автоматическим выравниванием и соответствующим перераспределением оставшейся мощности между НВ и ВТВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности в ДПНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия компрессора (К), а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения их фюзеляжа и дисков вращения их НВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего их безопасного снижения; компьютер управления полетом, расположенный в их упомянутой БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их фюзеляжа с колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их фюзеляжа и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, при этом каждый тяжеловооруженный ДПКС и ОПКС, выполненный соответственно без и с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления ОПКС и возможностью опционального его управления пилотами из кабины фюзеляжа, а их фюзеляж для внутреннего вооружения имеют автоматические одно- и двухстворчатые соответствующие боковые и нижние отсеки, упомянутые ПУ которых с закрепленными на них УР воздух-воздух типа Р-77 и стратегическими крылатыми ракетами (СКР), обеспечивающими борьбу с воздушной и наземной, надводной целью, смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а их планер выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, и из алюминиево-литиевых сплавов и композиционных материалов, армированных углеродным волокном, способным защитить их бортовое оборудование от мощных электромагнитных вспышек или воздействия лазерного излучения, имеет носовую и кормовую части фюзеляжа и в его середине включает два композитных монолитных S-образных впускных канала и жесткие балки внутри центроплана и трапециевидных внутренних секций РВК, усиленных лонжеронами и ребрами жесткости с общей композитной обшивкой РВК и содержит трехопорное колесное шасси с носовой и главными стойками, убирающимися соответственно в отсеки фюзеляжа и крыльевых гондол, а их левый и правый надфюзеляжные воздухозаборники, не имеющие пластинчатых отсекателей пограничного слоя и внутренних подвижных регулирующих элементов, выполнены как для экранирования лопаток упомянутых ССТ с двойной S-образностью при виде сбоку и сверху, так и отведения пограничного слоя и повышения коэффициента восстановления полного давления без щели для слива пограничного слоя, но и включают рампы, сжимающие поток и формирующие коническое его течение, причем малозаметные ДПКС\ОПКС для создания буферной безопасной авиазоны между упомянутым АНЛ и ПВО цели, несущие в бомбоотсеках их фюзеляжа по 2\1+1 СКР, увеличивают после выполнения ими технологии ВВП/КВВП соответственно дальность действия до 6020/8155\8020/10155+6020/8155 км СКР типа Х-555\Х-101+Х-555, образующих после их запуска автономные рои СКР с буксируемыми ложными их целями, а их фюзеляж имеет от пирамидальной носовой его части скошенные по всей его длине боковые стороны, образующие при виде спереди пяти- или шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, а каждое упомянутое ППС их крыльевых гондол для управления вектором тяги (УВТ) снабжено верхней (27) и нижней (28) стенками, содержащими на их концах прямоугольные в плане люки-сопла с поперечными верхней (29) и нижней (30) поворотными на их осях (31) и (32) в вертикальной плоскости створками, имеющими от осей их поворота длину Lств с их фасками, определяемую из соотношения: Lств=hсоп/cos45° м, где hсоп - высота сопла, и раздельные приводы, обеспечивающие между боковых его стенок (33-34) их отклонение к продольной оси сопла вниз и вверх синхронно двумя на углы ±22,5°, смыкаясь их фасками, либо одной из них на углы ±22,5° при закрытой другой синфазно или дифференциально соответственно для реверса тяги либо для продольного или поперечного управления либо только нижней створки (30) на угол +45° до соприкосновения ее фаски с поверхностью верхней закрытой створки (29) для изменения направления горизонтальной тяги на вертикальную, а их фюзеляж между упомянутых КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, при этом электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается сверху носовой части фюзеляжа головного ОПКС, снабженного двухчастотной бортовой радиолокационной станцией (РЛС) с активной фазированной антенной решеткой (АФАР), которая с ЭОД на безопасных для ОПКС расстояниях обеспечивает геолокацию цели и управление оружейными нагрузками ОПКС и по лазерному каналу связи ДПКС с наведением на цель их СКР и УР класса воздух-воздух в составе авиагруппы, применяемой совместно с рядом других авиагрупп, способных и обмениваться информацией между их головными ОПКС в рамках их единого так называемого информационного облака, и динамически адаптироваться к изменяющимся условиям, включая как и то, что если одна из авиагрупп обнаруживает цели в количестве большем, чем может поразить, то по лазерному каналу связи ее ОПКС передает целеуказание на ряд ОПКС, не использующие свои РЛС в составе других авиагрупп, и они совместно атакуют цели, так и их тактическое управление и координацию, распределяющую по выбранным целям и ОПКС, и ДПКС ряда авиагрупп и/или полностью, повышая эффективность их атаки, интегрированы к автономному стратегическому их роению, причем компьютер системы ЭОД связан с центральным бортовым компьютером ОПКС быстродействующим оптоволоконным интерфейсом, обеспечивающим полную интеграцию общей информационной системы ОПКС с системой ЭОД, включающей в ее состав среднедиапазонный инфракрасный сенсор, который, представляя собой тепловизор, лазер и камеру с ПЗС-матрицей, позволяет выполнять фото- и видеосъемку с большим разрешением, автоматическое слежение за целью, поиск в инфракрасном диапазоне, лазерную подсветку цели, измерение дальности с помощью лазера и отслеживание лазерных меток, поставленных другими системами слежения и наведения, при этом в каждой авиагруппе управление каждым ДПКС по лазерному каналу закрытой связи, не подверженному помехам со стороны радиоэлектронной борьбы (РЭБ) противника, обеспечивается вторым пилотом ОПКС, используя систему его самообороны и противодействия РЭБ противника - станцию активных электронных помех, а также компактные твердотельные лазерные и микроволновые установки направленной энергии, применяемые в качестве самообороны и сопутствующего вооружения воздушного базирования, подавляющие головки самонаведения УР противника и выводящие из строя электронику противника соответственно, причем в каждой авиагруппе каждый ОПКС на передней и задней кромках соответственно упомянутых РВК с ПКН и ЗКН вплоть до концевых частей РВК смонтированы РЛС с конформной активной решеткой и лазерные локаторы, которые используются для отслеживания соответствующих воздушных и наземных целей, в то время как его РЛС с АФАР используется для обеспечения детального представления наземных стратегических целей, таких как базы и инфраструктура, при этом атомный АНЛ, имеющий асимметричный корпус, выполнен с двухосадочной его схемой, позволяющей использовать осадку в диапазоне от 8,5 до 10,5 м для увеличения ледопроходимости и выполнения специальных задач на мелководье и устье рек, снабженный движительным комплексом, состоящим из пары основных и пары дополнительных соответственно кормовых и носовых винторулевых колонок (ВРК), каждая из которых, работая независимо и повышая эффективность маневрирования в любом направлении и даже вращения на месте, может как поворачиваться в горизонтальной плоскости на 360°, так и оснащена встроенным высокомоментным электродвигателем постоянного тока с соответствующим гребным винтом фиксированного шага (ВФШ), смонтированным непосредственно на валу внутри гондолы полноповоротной ВРК, причем установка носовых ВРК на атомном АНЛ обеспечивает высокую маневренность в ледовых условиях, но и на чистой воде, что очень важно в зонах с ограниченным водным пространством, но и, достигая эффекта размывания льда работой этих ВФШ как снижает прочность льда и повышает способность прохождения торосов, так и оказывает вредное воздействие на работу кормовых ВРК, при этом для повышения эффективности пропульсивной установки атомного АНЛ пара носовых ВРК, которые, обеспечивая эффект расхождения векторов их тяги от продольной оси АНЛ, развернуты под углом друг к другу на эффективный упор АНЛ в режиме создания тягового усилия, причем пропульсивная установка с четырьмя ВРК и четырьмя джойстиками управления объединены в одном мостике с установкой двух навигационных мостиков - основного и дублирующего для управления АНЛ во время хода и визуального контроля, улучшающего со второго мостика панорамный обзор при его движении косым ходом.
3. УРКА по любому из пп. 1, 2, отличающийся тем, что каждый турбовинтовентиляторный ОПКС и ДПКС с холодными потоками воздуха от НВ в ДПНС-Х2 при ВВП и реактивной струи сжатого воздуха в ПРС-R2 при крейсерском полете с маршевой тяговооруженностью первого уровня - 0,225 или второго - 0,258 либо третьего уровня - 0,5 или четвертого - 0,62, используя соответственно 22% или 27% либо 72% или 100% мощности их СУ, обеспечивает на высоте 15 км скорость Маха М=0,894 или М=0,988 либо транс- или сверхзвуковую скорость М=0,996 или М=1,4 с упомянутым РВК, имеющим с его ПКН от V-образной в плане носовой части фюзеляжа переменную стреловидность, а каждый их КГтД снабжен его реактивным прямоугольным плоским соплом с термопоглощающим покрытием, уменьшая инфракрасное (ИК) излучение, имеет заднюю V-образную в плане кромку, размещенную в продолжение или параллельно задней кромке упомянутого РВК, образующую с конусообразным кормовым обтекателем и задней кромкой РВК пилообразную стреловидность, но и форсажную камеру, используемую на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутыми ССТ и задними перед форсажной камерой открытыми управляемыми створками упомянутой его кормовой гондолы для дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговооруженность их СУ с 0,62/0,5 до 0,78/0,63, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов ОПКС позволит увеличить жесткость фюзеляжа, снизить толщину обшивки и уменьшить массу, причем планер ОПКС с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный броне-фонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих всепогодную сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом для управления ОПКС в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видны на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
| ПАЛУБНЫЙ АВИАЦИОННЫЙ БЕСПИЛОТНЫЙ ПРОТИВОЛОДОЧНЫЙ КОМПЛЕКС (ПАБПК) | 2017 |
|
RU2684160C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| US 4523729 A1, 18.06.1985 | |||
| US 4828203 A1, 09.05.1989 | |||
| БЕСПИЛОТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ ЕГО ПРИМЕНЕНИЯ ПРИ ВОЗДУШНОМ БАЗИРОВАНИИ | 2018 |
|
RU2686561C1 |
| WO 2006113877 A2, 26.10.2006 | |||
| US 5218921 A1, 15.06.1993. | |||

