Область техники
Настоящее изобретение относится к клиновому механизму (wedge) проходной системы, который может смещаться между положением без сжатия и положением сжатия.
Уровень техники
Настоящее изобретение в основном относится к проходной системе, содержащей раму, несколько модулей, монтажные панели и клиновой механизм. Модули, монтажные панели и клиновой механизм размещены внутри рамы. Модули выполнены из сжимаемого материала, и каждый модуль предназначен для размещения кабеля, трубы или провода. Функция монтажных панелей состоит в том, чтобы предотвращать выход модулей за пределы рамы при использовании. Клиновой механизм является средством сжатия, которое предназначено для сжатия модулей для того, чтобы каждый модуль был уплотнен изнутри с кабелем, трубами или проводниками и снаружи - с другими модулями, монтажными панелями и/или рамой.
Проходные системы такого типа используются при разнообразных рабочих средах, таких как технологические шкафы, отсеки аппаратуры, распределительные щиты и станки, а также палубы и переборки судов. Они используются в различных отраслях промышленности, таких как автомобильная, телекоммуникационная, генерации и распределения энергии, а также имеют морское и прибрежное применение. Они могут быть предназначены для герметизации от текучей среды, газа, пламени, грызунов, насекомых, пыли, влажности и т.п.
В одном из клиновых механизмов в соответствии с уровнем техники (WO 96/11353), клиновой механизм смещается между положением без сжатия и положением сжатия посредством двух винтов, при этом каждый винт имеет резьбу с противоположно направленным шагом. Винты соединены с двумя клиновыми элементами, которые перемещаются навстречу друг другу, если поворот винтов осуществляется в первом направлении, и друг от друга, если поворот винтов происходит в противоположном направлении. Резьбы винтов находятся в зацеплении с резьбами гильз внутри клиновых элементов, при этом резьба гильзы одного из клиновых элементов находятся в зацеплении с резьбами винтов с первым шагом, а резьба гильзы другого клинового элемента находится в зацеплении с резьбами винтов с противонаправленным шагом. Два дополнительных клиновых элемента размещены на наклонных поверхностях на противоположных сторонах двух первых клиновых элементов, посредством чего два дополнительных клиновых элемента будут перемещаться навстречу друг другу и обратно в зависимости от перемещения двух первых клиновых элементов. Если два дополнительных клиновых элемента перемещаются друг от друга, то толщина клинового механизма увеличивается, создавая силу сжатия при размещении внутри рамы.
Для перемещения клинового механизма между положением без сжатия и положением сжатия необходим поворот обоих винтов, что обычно выполняется поочередно. При невыполнении поочередного поворота винтов существует риск перекоса соединенных с винтами клиновых элементов и возможной блокировки дальнейших передвижений этих клиновых элементов. В проходных системах такого типа крайне необходимо, чтобы сила сжатия, заданная клиновым механизмом, составляла заданное значение. Если сила сжатия ниже указанной заданной величины, то существует явный риск отсутствия герметичного уплотнения. В известном из уровня техники клиновом механизме сила сжатия задается при вывинчивании винтов, в результате чего расстояние между головками винтов и клиновым механизмом увеличивается. Указанное расстояние является показателем приложенной силы сжатия. Таким образом, заданная сила достигается, когда расстояние между головками винтов и клиновым механизмом составляет конкретное значение. Чтобы установить, что приложена достаточная сила сжатия, необходимо измерить указанное расстояние. Подобное измерение часто является трудоемким.
Раскрытие сущности изобретения
Ввиду вышесказанного, одна задача настоящего изобретения состоит в том, чтобы обеспечить клиновой механизм для проходной системы, с которым легче работать при его задействовании и деактивации. Кроме того, положительный эффект состоит в облегчении как достижения необходимой силы сжатия, так и определения ее достижения.
Согласно одному аспекту настоящего изобретения обеспечен клиновой механизм, содержащий четыре элемента. Первый клиновой элемент и второй клиновой элемент выполнены с возможностью перемещения в направлении друг к другу и друг от друга. Третий клиновой элемент и четвертый клиновой элемент размещены на противоположных сторонах первого и второго клиновых элементов с примыканием к первому и второму клиновым элементам вдоль наклонных поверхностей. Клиновые элементы и наклонные поверхности расположены таким образом, что третий и четвертый клиновые элементы перемещаются по направлению друг от друга, когда первый и второй клиновые элементы перемещаются навстречу друг другу, и третий и четвертый клиновые элементы перемещаются навстречу друг другу, когда первый и второй клиновые элементы перемещаются по направлению друг от друга. Клиновой механизм также содержит держатель на внешней стороне первого клиновых элемента. В держателе размещена втулка, выполненная с возможностью вращения относительно держателя. Нажимной винт соединен одним концом со вторым клиновым элементом и проходит через отверстие первого клиновых элемента. Головка нажимного винта размещена внутри втулки держателя.
Дополнительные задачи и преимущества настоящего изобретения станут очевидны для специалиста в данной области техники, ознакомившегося с приведенным ниже подробным описанием предпочтительных в настоящее время вариантов реализации изобретения.
Краткое описание чертежей
Настоящее изобретение описано ниже на примере и со ссылкой на прилагаемые чертежи.
На чертежах:
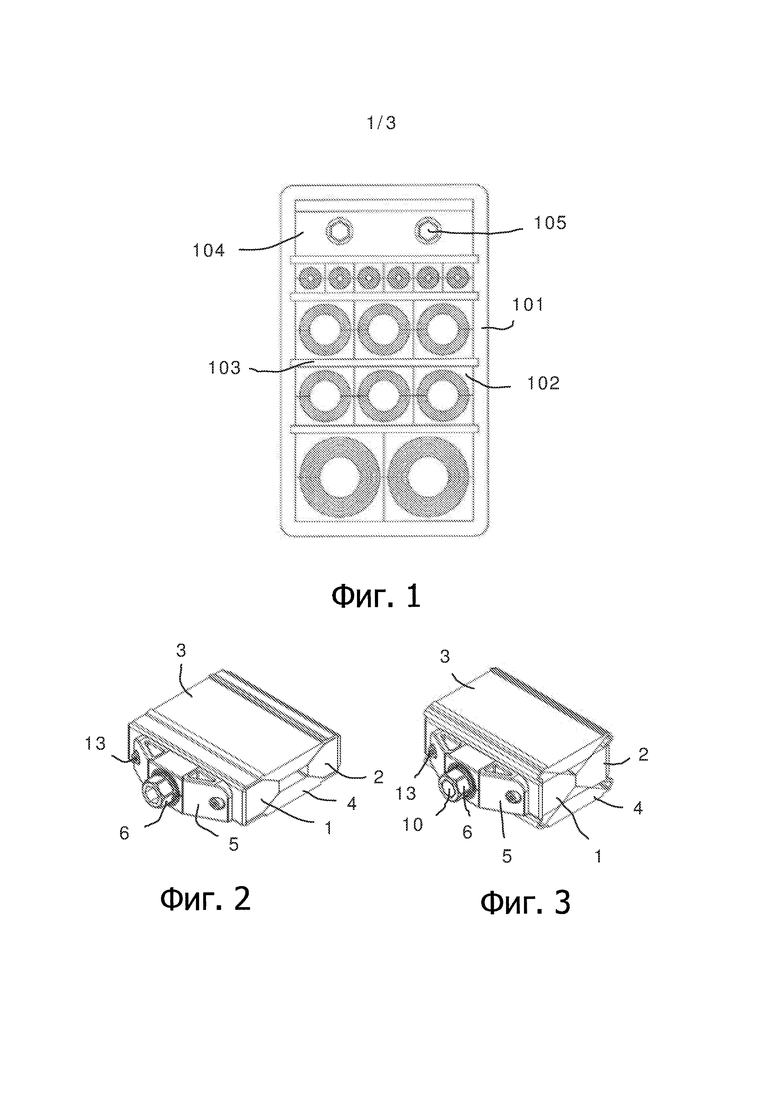
ФИГ. 1 - вид спереди проходной системы, известной из уровня техники, в которой может быть использован клиновой механизм по настоящему изобретению,
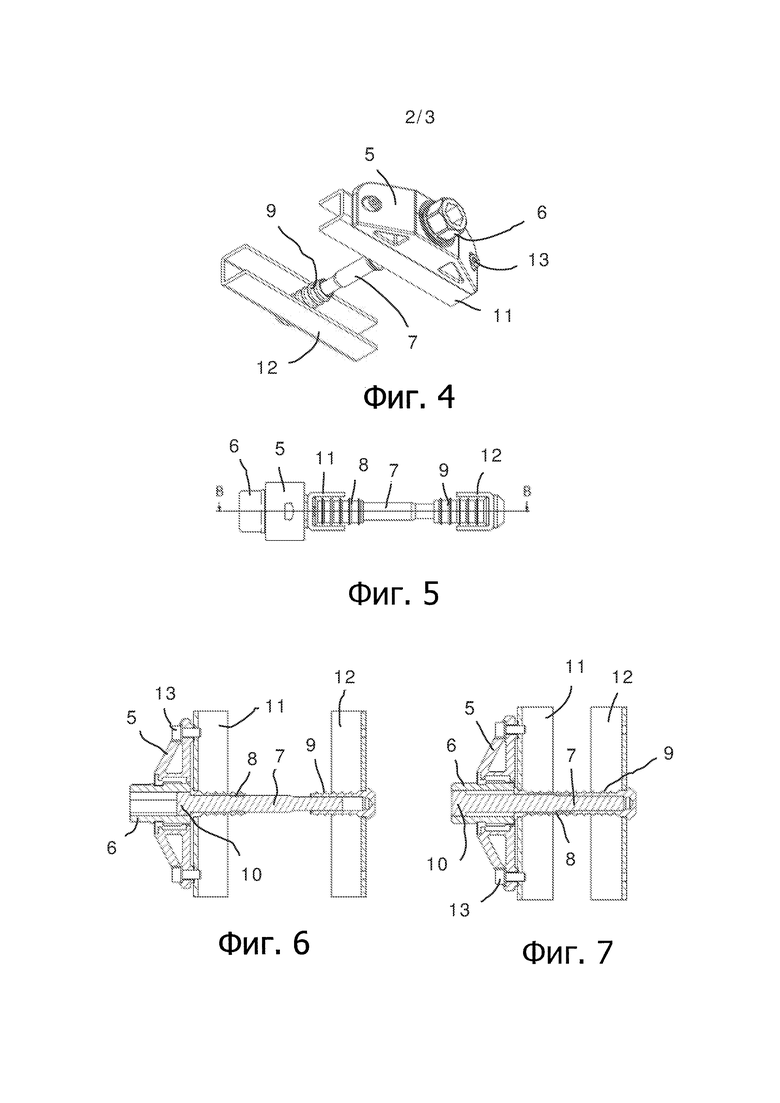
ФИГ. 2 - вид в перспективе одного из вариантов реализации клинового механизма в соответствии с настоящим изобретением в положении без сжатия,
ФИГ. 3 - вид в перспективе клинового механизма по ФИГ. 2 в положении сжатия,
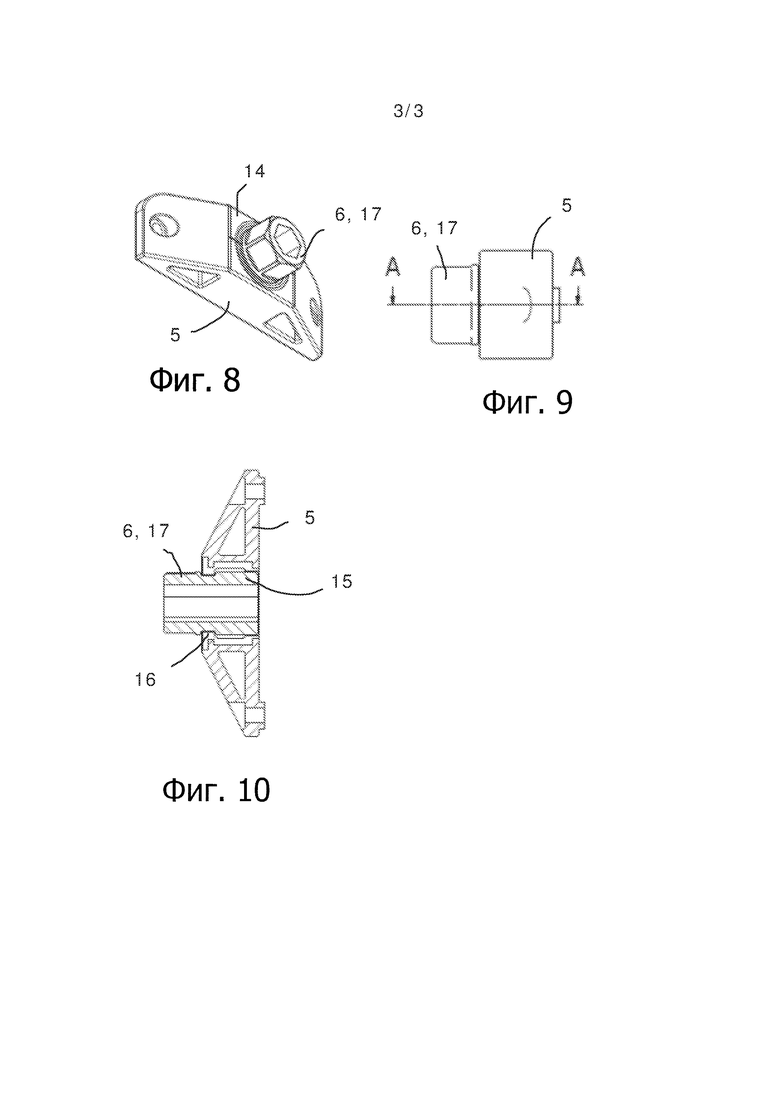
ФИГ. 4 - вид в перспективе частей клинового механизма по ФИГ. 2 и 3,
ФИГ. 5 - вид сбоку частей по ФИГ. 4,
ФИГ. 6 - вид в разрезе по линии В-В частей по ФИГ. 5 в положении без сжатия
ФИГ. 7 - вид в разрезе частей по ФИГ. 6 в состоянии сжатия,
ФИГ. 8 - вид в перспективе держателя клинового механизма по ФИГ. 2,
ФИГ. 9 - вид сбоку держателя по ФИГ. 8, и
ФИГ. 10 - вид в разрезе по линии А-А по ФИГ. 9.
Осуществление изобретения
Используемые в данном описании термины «продольный», «поперечный» и проч. относятся к нажимному винту клинового механизма.
Клиновой механизм по настоящему изобретению предназначен для использования в проходной системе, как показано на ФИГ. 1. Точная форма различных узлов проходной системы может различаться. В показанном варианте реализации согласно известному уровню техники в раме 101 размещено несколько модулей 102. Рама 101 предназначена для размещения в месте прохода, таком как стена, крыша или пол, и в каждом модуле 102 должен быть размещен кабель, провод или труба. Для помощи при удержании модулей 102 на позиции внутри рамы 101, между каждым рядом модулей 102 внутри рамы 101 установлено несколько монтажных панелей 103. Монтажные панели 103 расположены так, чтобы имелась возможность их перемещения в продольном направлении внутри рамы 101, то есть вверх и вниз, как показано на ФИГ. 1. Клиновой механизм 104 согласно уровню техники размещен на одном внутреннем торце рамы 101, при этом монтажная панель 103 находится между клиновым механизмом 104 и соседним рядом модулей 102. Клиновой механизм 104 согласно уровню техники представляет собой узел для сжатия, а с помощью винтов 105 клиновой механизм 104 может быть расширен внутри рамы 101. Расширение клинового механизма 104 воздействует на модули 102 внутри рамы 101, в результате чего модули 102 прижимаются друг к другу, к монтажным панелям 103, к внутренним торцам рамы 101 и/или к любому кабелю и т.п., размещенным внутри модуля 102 в зависимости от размещения соответствующего модуля 102.
Клиновой механизм по настоящему изобретению предназначен для замены клинового механизма в проходной системе, например такой, как показана на ФИГ. 1. Клиновой механизм по настоящему изобретению содержит первый клиновой элемент 1, второй клиновой элемент 2, третий клиновой элемент 3 и четвертый клиновой элемент 4. Клиновые элементы 1-4 выполнены из резинового или из пластикового материала. Клиновой механизм дополнительно содержит нажимной винт 7, держатель 5 и втулку 6. Третий и четвертый клиновые элементы 3, 4 передвигают по направлению друг к другу и друг от друга со взаимодействием с первым и вторым клиновыми элементами 1, 2. Передний узел 11 крепления заделан в резиновый или пластиковый материал первого клинового элемента 1, а задний узел 12 крепления заделан в резиновый или пластиковый материал второго клинового элемента 2.
Нажимной винт 7 размещен в двух гильзах 8, 9. Первая гильза 8 размещена в первом элементе 1 и прикреплена к переднему узлу 11 крепления. Вторая гильза 9 размещена во втором клиновом элементе 2 и прикреплена к заднему узлу 12 крепления. Стержневая часть нажимного винта 7 проходит через первую гильзу 8. Конец нажимного винта 7 размещен внутри второй гильзы 9. Передний и задний узлы 11, 12 крепления обычно изготавливаются из металла, например из стали. Передний и задний узлы 11, 12 крепления каждый имеет U-образное поперечное сечение, причем нижняя часть формы U направлена навстречу первого и второго клиновых элементов 1, 2 соответственно. Каждый из узлов крепления 11, 12 проходит поперечно вдоль всего соответствующего клинового элемента 1, 2. Нажимной винт 7 имеет первую резьбу, взаимодействующую с резьбой одной из гильз 8, 9, и вторую резьбу, взаимодействующую с резьбой другой гильзы 8, 9. Одна из резьб винта 7 является правой, а другая левой. В зависимости от направления вращения нажимного винта 7 первый и второй клиновые элементы 1, 2 перемещаются по направлению друг к другу или друг от друга.
Держатель 5 прикреплен к переднему узлу 11 крепления с помощью винтов 13. Специалисту в данной области очевидно, что держатель 5 может быть прикреплен другими способами, например, посредством быстрофиксируемых крепежных элементов или клея. Втулка 6 размещена в держателе 5. В показанном варианте реализации втулка 6 размещена в держателе 5 путем подъема съемной части 14 держателя 5. Втулка 6 имеет окружной паз 16, расположенный между цилиндрической частью 15 и головкой 17 втулки 6. Держатель 5 вместе со съемной частью 14 держателя 5 образует кольцо, выступающее внутрь, которое размещено в окружном пазе 16 втулки 6. Для установки втулки 6 в держатель 5 сначала поднимают съемную часть 14 держателя 5, а затем втулку 6 проталкивают в промежуток, образованный после подъема съемной части 14 держателя 5. Втулку 6 проталкивают в держатель 5 таким образом, что часть кольца в держателе 5 размещена внутри окружного паза 16 втулки 6. Съемную часть 14 держателя 5 затем помещают в держатель 5, в результате чего часть кольца в съемной части 14 держателя 5 размещена в окружном пазе 16 втулки 6. Соотношение между окружным пазом 16 втулки 6 и кольцом держателя 5 таково, что предотвращено продольное перемещение втулки 6 относительно держателя 5, но обеспечено ее свободное вращение относительно держателя 5. Держатель 5 изготовлен из подходящего материала, такого как пластик или алюминий.
Съемная часть 14 держателя 5 может быть сдвинута с одного края держателя 5 посредством взаимодействующих пазов и выступающих частей съемной части 14 держателя 5 и держателя 5.
Нажимной винт 7 размещен в сквозном отверстии первого клинового элемента 1. Он также размещен в сквозном отверстии втулки 6. Головка 10 нажимного винта 7 размещена внутри головки 17 втулки 6 таким образом, что она может перемещаться в продольном направлении относительно втулки 6, но не вращаться относительно нее. Головка 17 втулки 6, выступающая наружу держателя 5, имеет внутреннее отверстие с шестиугольным поперечным сечением, соответствующее форме головки нажимного винта 7. Возможны иные формы внутреннего отверстия головки 17 втулки 6 и головки 10 нажимного винта 7. Однако указанные формы должны соответствовать друг другу таким образом, чтобы головка 10 нажимного винта 7 препятствовала вращению, но была способна перемещаться вдоль втулки 6. В области цилиндрической части 15 и паза 16 сквозное отверстие втулки 6 имеет круглое поперечное сечение. Таким образом, в сквозном отверстии втулки 6 образуется закраина между частью с круглым поперечным сечением и частью с шестиугольным поперечным сечением, причем эта закраина ограничивает продольное перемещение головки 10 нажимного винта 7 внутрь. Закраина между цилиндрической и шестиугольной частями сквозного отверстия втулки 6 дает четкий упор для головки 10 нажимного винта 7. Нажимной винт 7 вращается посредством поворота втулки 6, например, с помощью гаечного ключа. Внутренний конец нажимного винта 7 размещен в гильзе 9, закрепленной на заднем узле 12 крепления.
Когда гильзы 8, 9 прикреплены к переднему узлу 11 крепления первого клинового элемента 1 и к заднему узлу 12 крепления второго клинового элемента 2, соответственно, то при вращении нажимного винта 7 первый и второй клиновые элементы 1, 2 перемещаются в направлении навстречу друг другу или друг от друга. То, будут ли первый и второй клиновые элементы 1, 2 перемещаться в направлении навстречу друг другу или друг от друга, зависит от того, в каком направлении поворачивается втулка 6 и вследствие этого нажимной винт 7. Направления шагов нажимного винта 7 таковы, что при вращении нажимного винта 7 наружу, клиновой механизм переводится в положение сжатия.
Первый и второй клиновые элементы 1, 2 расположены на одной оси и могут перемещаться в направлении навстречу друг другу и друг от друга. Третий и четвертый клиновые элементы 3, 4 расположены друг над другом и могут перемещаться в направлении навстречу друг другу и друг от друга. Третий и четвертый клиновые элементы 3, 4 размещены между первым и вторым клиновыми элементами 1, 2. Первый клиновой элемент 1 примыкает к третьему клиновому элементу 3 и к четвертому клиновому элементу 4 вдоль наклонных поверхностей. Второй клиновой элемент 2 примыкает к третьему клиновому элементу 3 и к четвертому клиновому элементу 4 вдоль наклонных поверхностей. Клиновые элементы 1, 2, 3, 4 и их взаимодействующие наклонные поверхности расположены таким образом, что когда первый клиновой элемент 1 и второй клиновой элемент 2 передвигаются навстречу друг другу, третий клиновой элемент 3 и четвертый клиновой элемент 4 перемещаются друг от друга. Соответственно, когда первый клиновой элемент 1 и второй клиновой элемент 2 отодвигаются друг от друга, третий клиновой элемент 3 и четвертый клиновой элемент 4 перемещаются навстречу друг другу.
При использовании клиновой механизм может перемещаться между двумя крайними положениями. В первом крайнем положении, как показано на ФИГ. 2, верхняя поверхность третьего клинового элемента 3 находится примерно на одном уровне с верхней поверхностью первого клинового элемента 1, а верхняя поверхность второго клинового элемента 2 и нижняя поверхность четвертого клинового элемента 4 находятся примерно на одном уровне с нижней поверхностью первого клинового элемента 1 и с нижней поверхностью второго клинового элемента 2. Это первое крайнее положение клинового механизма можно назвать положением без сжатия или плоским состоянием, клиновой механизм настолько тонок, что попадает в это положение. Во втором крайнем положении, как показано на ФИГ. 3, первый и второй клиновые элементы 1, 2 перемещены настолько близко друг к другу, насколько это возможно, в результате чего третий и четвертый клиновые элементы 3, 4 перемещены настолько далеко друг от друга, насколько это возможно. В упомянутом втором крайнем положении первый и второй клиновые элементы 1, 2 обычно примыкают друг к другу, делая четкую остановку. Во втором крайнем случае толщина клинового механизма велика настолько, насколько это возможно. Второе крайнее положение можно назвать состоянием полного сжатия. Клиновой механизм может занимать любое положение между крайними положениями, но при использовании он обычно расположен в одном из указанных крайних положений. Он находится в первом крайнем положении для вставления в раму и во втором крайнем положении для того, чтобы обеспечить заданное сжатие внутри рамы.
В положении сжатия клинового механизма, соответствующем второму крайнему положению, как показано на ФИГ. 3, внешняя головка 10 нажимного винта 7 должна находиться на одном уровне с внешним концом головки 17 втулки 6. Когда внешняя головка 10 нажимного винта 7 находится на одном уровне с внешней головкой 17 втулки 6, достигается желаемая сила сжатия. Таким образом, этим достигается указание на надлежащее сжатии, как визуальное, так и тактильное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СРЕДСТВО ИНДИКАЦИИ КЛИНОВОГО МЕХАНИЗМА ПРОХОДНОЙ СИСТЕМЫ | 2016 |
|
RU2700686C2 |
| ЯВНО ВЫРАЖЕННЫЕ УПОРЫ КЛИНОВОГО МЕХАНИЗМА СЖАТИЯ | 2016 |
|
RU2697605C2 |
| КЛИНОВОЙ МЕХАНИЗМ СЖАТИЯ | 2016 |
|
RU2697212C2 |
| КЛИНОВОЙ МЕХАНИЗМ ПРОХОДНОЙ СИСТЕМЫ | 2016 |
|
RU2697210C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Устройство для обработки уплотнительных поверхностей клиновых задвижек | 1989 |
|
SU1790479A3 |
| ПНЕВМАТИЧЕСКИЙ ЗАЖИМНОЙ ПАТРОН, СНАБЖЕННЫЙ БЛОКИРОВОЧНЫМ МЕХАНИЗМОМ | 2018 |
|
RU2751612C2 |
| Центратор для сборки и сварки пластмассовых труб | 1987 |
|
SU1451044A1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ОПОР СИДЕНИЙ СТУЛЬЕВ, В ЧАСТНОСТИ ВРАЩАЮШИХСЯ СТУЛЬЕВ | 1994 |
|
RU2101993C1 |
| КОМПРЕССИОННЫЙ БЛОК КАБЕЛЬНОГО ВВОДА | 2017 |
|
RU2656243C1 |
Настоящее изобретение относится к клиновому механизму для проходной системы. Клиновой механизм содержит первый клиновой элемент (1), второй клиновой элемент (2), третий клиновой элемент (3) и четвертый клиновой элемент (4). Первый и второй клиновые элементы (1, 2) расположены с возможностью перемещения по направлению друг к другу и друг от друга. Третий и четвертый клиновые элементы (3, 4) размещены на противоположных сторонах первого и второго клиновых элементов (1, 2), примыкая к первому и второму клиновым элементам (1, 2) вдоль наклонных поверхностей. Клиновые элементы (1, 2, 3, 4) и наклонные поверхности расположены таким образом, что третий и четвертый клиновые элементы (3, 4) перемещаются по направлению друг от друга, когда первый и второй клиновые элементы (1, 2) перемещаются навстречу друг другу, и третий и четвертый клиновые элементы (3, 4) перемещаются навстречу друг другу, когда первый и второй клиновые элементы (1, 2) перемещаются по направлению друг от друга. Изобретение обеспечивает создание клинового механизма для проходной системы, с которым легче работать при его задействовании и деактивации. Кроме того, обеспечивается облегчение как достижения необходимой силы сжатия, так и определения ее достижения. 12 з.п. ф-лы, 10 ил.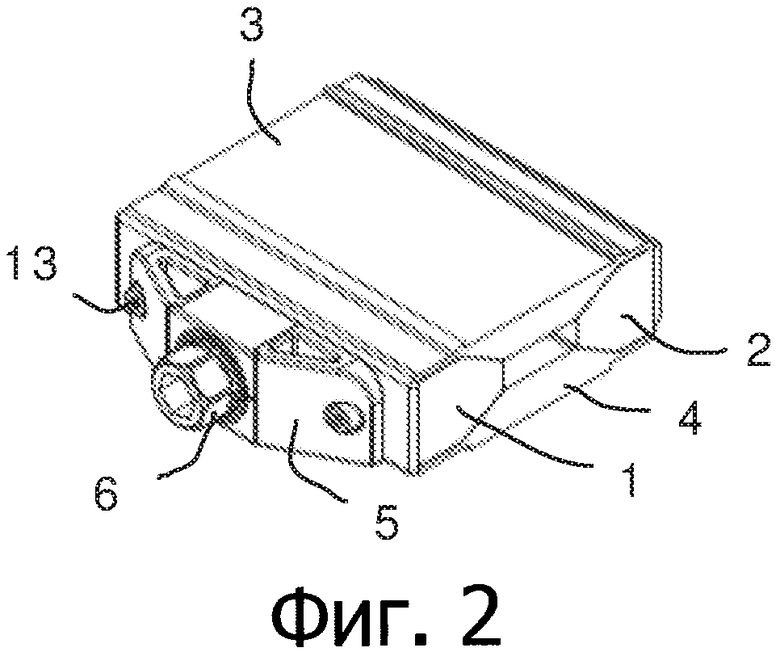
1. Клиновой механизм для проходной системы, содержащий первый клиновой элемент (1), второй клиновой элемент (2), третий клиновой элемент (3) и четвертый клиновой элемент (4),
при этом первый и второй клиновые элементы (1, 2) выполнены с возможностью перемещения по направлению навстречу друг другу и друг от друга, а
третий и четвертый клиновые элементы (3, 4) размещены на противоположных сторонах первого и второго клиновых элементов (1, 2) и примыкают к первому и второму клиновым элементам (1, 2) вдоль наклонных поверхностей, и
при этом клиновые элементы (1, 2, 3, 4) и наклонные поверхности расположены так, что третий и четвертый клиновые элементы (3, 4) выполнены с возможностью перемещения в направлении друг от друга при перемещении первого и второго клиновых элементов (1, 2) навстречу друг другу, и
третий и четвертый клиновые элементы (3, 4) выполнены с возможностью перемещения навстречу друг другу при перемещении первого и второго клиновых элементов (1, 2) друг от друга,
отличающийся тем, что
он содержит держатель (5) на внешней стороне первого клинового элемента (1), причем в держателе (5) размещена втулка (6), выполненная с возможностью вращения относительно держателя (5),
нажимной винт (7) соединен одним концом со вторым клиновым элементом (2) и проходит через отверстие первого клинового элемента (1), а
головка (10) нажимного винта (7) размещена внутри втулки (6) держателя (5).
2. Клиновой механизм по п. 1, в котором втулка (6) заблокирована от продольного перемещения относительно держателя (5).
3. Клиновой механизм по п. 1 или 2, в котором предотвращено вращение головки (10) нажимного винта (7) относительно втулки (6), но обеспечено ее свободное продольное перемещение относительно втулки (6).
4. Клиновой механизм по любому из предшествующих пунктов, в котором втулка (6) имеет цилиндрическую часть (15) на одном конце, головку (17) на противоположном конце и внешний окружной паз (16), расположенный между цилиндрической частью (15) и головкой (17), причем втулка (6) имеет внутреннее сквозное отверстие.
5. Клиновой механизм по п. 4, в котором сквозное отверстие втулки (6) в области головки (17) втулки (6) имеет внутреннюю форму, соответствующую форме головки (10) нажимного винта (7).
6. Клиновой механизм по п. 5, в котором сквозное отверстие имеет шестиугольную форму в области головки (17) втулки (6), соответствующую шестиугольной форме головки (10) нажимного винта (7).
7. Клиновой механизм по п. 6, в котором внутреннее сквозное отверстие втулки (6) имеет поперечное сечение круглой формы в области цилиндрической части (15) и паза (16) втулки (6) с образованием закраины внутри сквозного отверстия между частью, имеющей внутреннее поперечное сечение круглой формы, и частью, имеющей внутреннее поперечное сечение шестиугольной формы.
8. Клиновой механизм по п. 4, в котором держатель (5) имеет съемную часть (14), которая выполнена с возможностью перемещения по направлению в остальную часть держателя (14) или из нее посредством взаимодействующих пазов и выступающих частей,
причем держатель (5) вместе со съемной частью (14) образует окружное кольцо, выступающее внутрь, а втулка (6) расположена в держателе (5), и при этом окружное кольцо выступает во внешний окружной паз (16) втулки (6).
9. Клиновой механизм по любому из предшествующих пунктов, в котором первая гильза (8) размещена в первом клиновом элементе (1), а вторая гильза (9) размещена во втором клиновом элементе (10),
при этом нажимной винт (7) имеет резьбы с противоположным шагом, каждая из которых взаимодействует с внутренней резьбой одной из гильз (8, 9) таким образом, что в зависимости от направления вращения нажимного винта (7) обеспечено перемещение первого и второго клиновых элементов (1, 2) по направлению навстречу друг другу или друг от друга.
10. Клиновой механизм по п. 9, в котором передний узел (11) крепления размещен в первом клиновом элементе (1), а задний узел (12) крепления размещен во втором клиновом элементе (2), причем первая и вторая гильзы (8, 9) прикреплены к переднему и заднему узлам (11, 12) крепления соответственно.
11. Клиновой механизм по п. 10, в котором держатель (5) прикреплен к переднему узлу (11) крепления посредством винтов (13), быстрофиксируемых крепежных элементов или клея.
12. Клиновой механизм по любому из пп. 4-11, в котором в состоянии полного сжатия клинового механизма внешний конец головки (10) нажимного винта (7) находится на одном уровне с внешним концом головки (17) втулки (6).
13. Клиновой механизм по любому из предшествующих пунктов, который размещен внутри рамы проходной системы вместе с модулями и монтажными панелями.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| KR 101014761 B1, 15.02.2011 | |||
| CN 205565614 U, 07.09.2016 | |||
| WO 2008010755 A1, 24.01.2008 | |||
| KR 20100090583 A, 06.02.2009 | |||
| KR 101223090 B1, 05.10.2012 | |||
| WO 2016178622 A1, 04.05.2015 | |||
| Индикатор электрического напряжения | 1961 |
|
SU143139A1 |

