Изобретение относится к экзоскелетам, в том числе, к промышленным экзоскелетам - носимым на человеке-операторе средствам индивидуальной защиты опорно-двигательного аппарата, компенсирующим и/или перераспределяющим нагрузку на опорно-двигательный аппарат и предотвращающих или снижающих негативное воздействия тяжести трудового процесса на опорно-двигательный аппарат человека при манипуляциях с грузами при помощи ручного труда и предназначенный для усиления физических возможностей человека, который может быть использован, например, при проведении погрузочно-разгрузочных, в том числе такелажных, работ предполагающих поднятие и перемещение разнообразных тяжелых и/или объемных предметов, а также при монтаже или сборке узлов и агрегатов, предполагающих удержание и фиксацию деталей или инструмента при выполнении работ.
Для облегчения выполнения указанного вида работ при которых, как известно из биомеханики и анализа статистики травматичности, наиболее травмоопасные нагрузки действуют в поясничном отделе позвоночника, который в первую очередь нуждается в защите путем снижении внешних силовых факторов, используются экзоскелеты, представляющие собой внешнюю механическую несущую конструкцию, которая прикрепляется к телу человека с помощью манжет. В общем случае, принцип действия экзоскелета такого типа основан на передаче нагрузки с человека на механический силовой каркас и компенсации изгибающих моментов в суставах. Кинематически и конструктивно экзоскелеты устроены подобно скелету человека, при этом его звенья соединяются посредством шарниров, часть из которых могут быть оснащены накопителями потенциальной энергии, создающими необходимые моменты в тех или иных шарнирах, что помогает оператору выполнять заданные операции, снижая уровень нагрузки на мышечную систему. В случае же оснащения шарниров активными силовыми приводами можно достичь практически полной разгрузки человека. Соответственно, принято различать пассивные экзоскелеты, в которых выполнение основных и сервисных функций осуществляется без использования внешнего источника энергии, и, напротив, активные, в которых внешний источник энергии использован для выполнения основных функций, а также полуактивные, в которых источник энергии использован только для осуществления сервисных и дополнительных функций.
Известен «Пассивный экзоскелет» ПМ 217935 (2023), представляющий собой корсет, соединяющий грудную и пояснично-крестцовую опоры, опоры для бедер, опорную пластину спины, расположенную между грудной и пояснично-крестцовой опорами, регулировочные стропы, два эластомера, расположенные на опорной пластине спины и соединенные с задней частью опор для бедер. Известен также ряд более ранних пассивных экзоскелетов, например, по патентам ПМ 190786 (2019), ПМ 194544 (2019), US 20210007874 (2019), ПМ 198841 (2020), ПМ 211198 (2021), ПМ 212301 (2021) ПМ216 018 (2022), имеющих сходный состав и структуру, незначительно различающихся направлением укладки эластичных строп, их строением, способами их соединения с грудной опорой и опорой для бедер и регулировками длины эластомеров под анатомические особенности человека пользователя. Общим для этих технических решений является принцип работы, который основан на свойствах эластомеров накапливать потенциальную энергию при их растяжении во время наклона и при приседании человека, например, для захвата груза руками и возврате накопленной упругой энергии при подъеме.
Известен также ряд экзоскелетов, реализующих идею разгрузки, состоящих из каркаса с элементами крепления к туловищу, двух пар рычагов, шарнирно соединенных между собой, которые выполняют функции бедра и голеностопа, а также с каркасом и опорой стопы, например, по патентам РФ №№2116063 (1994), 2200529 (2000), 12029 (1999), 2110243 (1994), 2362598 (2007). Указанные устройства относятся к пассивным конструкциям, так как приводятся в движение под действием мышц, но обеспечивают разгрузку позвоночного столба, в частности, при ходьбе с грузом.
Последний в приведенном выше списке «Пассивный грузовой экзоскелетон, коленный шарнир пассивного грузового экзоскелетона, компенсатор пассивного грузового экзоскелетона» ПМ 2362598 (2007), также содержит каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, соединенных между собой посредством коленных шарниров с элементами фиксации и шарнирно связанных свободными концами с каркасом и опорами стоп. В свою очередь, каркас выполнен в виде двухчастного корсета с укрепленными на нем продольными направляющими, переходящими с передней на заднюю часть корсета. Соединение рычагов с каркасом осуществляется посредством компенсатора, установленного с возможностью перемещения по направляющим при изменении угла между каркасом и тазобедренным рычагом при наклоне человека. Рычаги выполнены в виде пространственных оболочек, размещаемых с возможностью фиксации на передней части бедра и голени элементами крепления. Элемент крепления к опорам стоп выполнен в виде шарнирного узла, фиксируемого на обуви с возможностью поворота стопы вокруг трех осей координат.
Известен также «Экзоскелет» по патенту ПМ 198903 (2020), состоящий из функционально соединенных между собой силового модуля, модуля крепления и модуля подъема груза. Силовой модуль включает в себя спинной каркас, соединяемый с помощью шарнира с бедренным звеном, которое, в свою очередь, соединено шарнирно с голенным звеном, шарнирно соединенным со звеном стопы. Спинной каркас присоединяется с помощью грудных фиксирующих креплений и креплений поясничного отдела к корпусу оператора, а бедренное звено, голенное звено и звено стопы фиксируется на соответствующей части тела оператора. Перемещение оператора по поверхности происходит за счет мышечной энергии человека без использования дополнительных источников энергии и движителей, а для подъема, опускания и удерживания груза используется модуль подъема груза, включающий в себя два троса расположенные внутри направляющих, установленных на спинном каркасе, причем на нижних свободных концах тросов установлены крючки для закрепления груза, при этом внутри корпуса модуля подъема груза установлен привод для подъема, опускания и фиксирования переносимых грузов, который состоит из адаптивной системы управления и привода, включающего в себя двигатель и редуктор, которые кинематически связаны с барабаном с намотанными и закрепленными на нем верхними концами тросов, при вращении которого и выполняется подъем, опускание или фиксирования грузов. При этом для выполнения такелажных работ оператор должен сначала наклониться и/или присесть для того, чтобы с помощью крючков на тросах вручную закрепить груз, который в свою очередь должен быть дополнительно оснащен элементами для зацепа крючков. Затем оператор должен встать без груза при, например, одновременном сматывании тросов с вращающегося барабана на необходимую длину. И, наконец, при вращении барабана в обратную сторону тросы наматываются на барабан и груз поднимается на высоту удобную для фиксации груза руками после чего барабан останавливается.
Недостатком этого устройства является то, что оно не только не снижает, а за счет необходимости преодолевать вес экзоскелета еще и увеличивает нагрузку на опорно-двигательный аппарат при выполнении вставания из положения «сидя» оператора в экзоскелете как без груза, так и тем более в случае необходимости при подъеме груза с пола руками, так как не имеет в своей конструкции функциональных элементов, предназначенных для формирования компенсирующих моментов, позволяющий хотя бы частично снять нагрузку с мышц и суставов человека.
Наиболее близким к заявляемому техническому решению аналогом, принятым за прототип является «Силовой модуль экзоскелета» по патенту ПМ 215 116 (2022), включающем в себя спинной каркас, бедренное звено, шарнирный узел из трех шарниров, соединяющий спинной каркас и бедренное звено для обеспечения вращения бедренного звена относительно спинного каркаса в сагиттальной, трансверсальной и фронтальной плоскостях силового модуля экзоскелета соответственно, голенное звено, соединенное с помощью шарнира с бедренным звеном, и звено стопы, соединенное с помощью шарнира с голенным звеном. В свою очередь, подобный разомкнутому костному кольцу таза человека спинной С-образный каркас с поясным ремнем для крепления его на операторе в области таза, два шарнирных узла и два бедренных звена с манжетами для фиксации их на бедрах оператора функционально объединены в тазобедренный шарнирный модуль, причем между спинным каркасом и шарнирными узлами установлен накопитель упругой энергии, один конец которого соединен со спинным каркасом, а другой с шарнирами шарнирных узлов, обеспечивающими вращение бедренных звеньев в сагиттальной плоскости. При этом накопитель упругой энергии представляет собой две газовых пружины, соответственно, у правого и левого тазобедренных шарниров. С целью выполнения операций по подъему груза на спинном каркасе устанавливается модуль подъема груза с тросовым подъемником, для анатомической настройки экзоскелета к конкретному оператору путем регулировки длин бедренного и голенного звеньев последние выполнены телескопическими, а крепление экзоскелета на операторе осуществляется с помощью жилета, поясного ремня, бедренных манжет и элементов крепления стоп.
Общий принципиальный недостаток с точки зрения степени разгрузки, присущий как прототипу, так и рассмотренным выше экзоскелетам с эластомерами, заключается в том, что включенные в их состав накопители упругой энергии в процессе наклона и приседания оператора путем расслабления мышечного аппарата, поддерживающего вертикальную позу, могут накопить упругую энергию равную части разности потенциальной энергии тела оператора и экзоскелета, которая равна их суммарному весу умноженному на разность высот общего центра масс в вертикальной позе и позе максимального приседа, необходимого для захвата груза с пола и коррекции позы в приседе для ориентации центра масс оператора в экзоскелете с грузом над голеностопным шарниром экзоскелета, с учетом того что габаритный груз, например, в виде коробки, располагается перед выступающими вперед коленями по отношению к опорным стопам. Очевидно, что при вставании упругие элементы высвобождают только часть запасенной энергии, что обусловлено внутренними потерями в эластомере, трением эластомеров о чехлы, трением уплотнения штока газовой пружины о цилиндр. По оценкам разных авторов (см., например, ПМ 198841, 2020 г. ), уровень разгрузки оператора может достигать только 30 - 47%. Таким образом, применение рассмотренных экзоскелетов позволяет снизить нагрузку на опорно-двигательный аппарат человека только на часть скомпенсированного экзоскелетом общего веса человека и экзоскелета, а оставшийся не скомпенсированный вес человека с экзоскелетом и полный вес груза, разрешенный в соответствии с современными санитарными нормами (приказ Минтруда РФ от 28.10.2020 N 753Н) для однократного подъема для мужчин и женщин соответственно 50 и 15 кг, человек должен преодолевать при вставании с грузом за счет работы мышечного аппарата.
В то же время, эффективность работы газовой пружины зависит от температуры эксплуатации и существенно снижается при работе при низких температурах окружающей среды, особенно при работе на улице или в неотапливаемом помещении в зимнее время года вплоть до разрешенных минус 35 градусов без ветра, т.к. перепад температур в этом случае составляет 55°С относительно 20°С, при которых производятся газовые пружины.
Кроме того, к недостаткам можно отнести также и тот факт, что максимальная упругая энергия накопится при полном расслаблении мышечного аппарата, ответственного за смену позы, (аналог «свободного падения») и точном соответствии упругой силы накопителя сдеформированного при смене позы для максимальной компенсации веса в позе приседа. Иначе оператор при недостаточной упругой силе будет вынужден тратить мышечную энергию на удержание требуемой позы приседа или на «дожатие» упругого накопителя за счет работы мышц сгибателей для достижения требуемой позы. Поэтому каждый экземпляр экзоскелета должен быть строго персонифицирован по весу и росту оператора. Так, если в случае экзоскелетов с эластомерами ситуация может быть частично скорректирована с помощью предусмотренных регулировок длин эластомеров, то в случае газовых пружин потребуется подбор наиболее подходящего элемента из номенклатурного ряда изделий и установка двух новых накопителей.
Более того, в положении «стоя» (вертикально без наклона вперед) шток газовой пружины находится в крайнем полностью вытянутом положении, поэтому отклонение бедренного звена назад относительно каркаса при ходьбе (бедро поворачивается относительно каркаса вперед-назад) сильно затруднено и по этой причине оператор в экзоскелете может передвигаться только в несколько неестественной позе с немного согнутыми ногами, что и обеспечивает возможность поворотов бедра относительно каркаса в сигитальной плоскости относительно этого, несколько сдвинутого вперед, положения. Это обстоятельство требует постоянного напряжения мышечного аппарата человека, в частности разгибателей бедра, а для движения бедра вперед требуется дополнительно сжимать газовую пружину, в первую очередь, путем сокращения мышц сгибателей бедра.
Задачами предложенного изобретения являются:
- максимальное снятие нагрузки с опорно-двигательного аппарата оператора в экзоскелете во время выполнения такелажных работ особенно при подъеме тяжелых и/или объемных предметов с пола,
- обеспечение независимости от антропоморфных особенностей оператора, в частности от его веса и размеров;
- обеспечение удобства работы оператора в экзоскелете при ходьбе;
- исключение зависимости рабочих параметров экзоскелета от отрицательных температур эксплуатации вплоть до предельной отрицательной рабочей температуры,
- повышение эффективности работы экзоскелета;
- обеспечение удобства управления работой тазобедренного шарнирного модуля экзоскелета.
Задача максимального снятия нагрузки на опорно-двигательный аппарат оператора в экзоскелете решается за счет придания обоим, правому и левому, накопителям энергии способности запасать упругую энергию, достаточную для того, чтобы при вставании оператора с грузом максимально компенсировать вес оператора с экзоскелетом и вес груза путем:
- включения в состав каждого накопителя энергии дополнительно к газовой пружине винтовой (например, цилиндрической) пружины сжатия установленной концентрично и подвижно вокруг цилиндра газовой пружины, причем пружина сжатия размещается между двумя концентрично установленными вокруг цилиндра и подвижными вдоль него трубчатыми цилиндрическими втулками с регулируемыми по положению винтовыми упорами на их внешних поверхностях, при этом первая втулка закреплена на подвижном конце штока газовой пружины, а вторая размещена со стороны шарнирной опоры цилиндра ось которой неподвижно закреплена на каркасе и направлена перпендикулярно сигитальной плоскости, причем на конце второй втулки со стороны шарнирной опоры цилиндра выполнены два диаметральных направляющих паза в которых размещена ось шарнирной опоры цилиндра и на подшипнике установлен бочкообразный опорный ролик ось вращения которого параллельна оси шарнирной опоры цилиндра;
- оснащения тазобедренного шарнирного модуля экзоскелета электромеханическими приводами, выполняющими в положении «сидя» регулируемое по величине сжатие пружин сжатия накопителей энергии, тем самым увеличивая запас упругой энергии в накопителях, необходимой для разгрузки оператора при выполнении вставания с грузом и
- оснащения экзоскелета бортовой аккумуляторной батареей и системой управления электроприводами с человеко-машинным интерфейсом для задания команд управления приводами сжатия пружин сжатия накопителей энергии и контроля состояния экзоскелета, а также управления выполнением сервисных функций.
Задача придания предложенному тазобедренному шарнирному модулю свойства независимости от веса оператора решается путем регулировки величины сжатия пружин сжатия накопителя энергии в положении «сидя», причем большему собственному весу оператора и весу груза будет соответствовать большее сжатие пружин сжатия накопителя с помощью регулировки расстояния между винтовыми упорами по отношению к начальной длине не сжатой пружины и активного сжатия пружины накопителя с помощью привода.
Задача обеспечения удобства работы оператора в экзоскелете при ходьбе решается путем обеспечения свободного относительного смещения между поршнем газовой пружины с закрепленной на нем первой втулкой и связанного с ним элемента бедренного звена, в свою очередь соединенного с каркасом шарниром поворота бедренного звена в сигитальной плоскости, за счет того, что этот элемент, представляющий собой выполненную в виде вилки наклонную стойку, которая шарнирно соединена с осью установленную в подвижном поршне с кольцевыми уплотнениями на концах, который в свою очередь установлен внутри закрепленной на поршне газовой пружины первой цилиндрической втулки с винтовой заглушкой на конце. Во втулке выполнены два продольных диаметральных паза для размещения и перемещения в них обоих концов шарнирной оси поршня, причем осевой ход поршня внутри втулки соответствует перемещению стойки в сигитальной плоскости при поворотах бедренного звена при ходьбе оператора в экзоскелете, при этом на обоих концах цилиндра, вмещающего поршень на дне, установлены эластичные упорные элементы, а в районе дна обоих цилиндров в боковой поверхности первой втулки установлены два игольчатых клапана с резьбовой регулировкой проходного сечения истечения воздуха из полости между втулкой и подвижным поршнем на конце которого в зоне клапана выполнена кольцевая фаска для свободного доступа воздуха к игольчатому клапану при контакте поршня с эластичным элементом.
Таким образом, достигается удобство при ходьбе в естественной позе со свободным поворотом бедренного звена в диапазоне углов характерных для ходьбы, исключаются жесткие ударные взаимодействия в конечных точках хода подвижного поршня, обеспечивается настройка на темп и величину шага ходьбы и практически исключается влияние температуры эксплуатации за счет регулирования скорости истечения воздуха путем изменения проходного сечения игольчатого клапана.
При этом в положении оператора «стоя» (без наклона вперед) предусмотрена возможность фиксации положения подвижного поршня относительно первой втулки и, следовательно, относительно поршня газовой пружины накопителя энергии с помощью поворотного байонетного замка для обеспечения заданной величины хода поршня газовой пружины внутри цилиндра и, соответственно, величины накопления упругой энергии при приседании для захвата груза, что исключает так называемый «мертвый ход» подвижного поршня внутри первой втулки необходимый для ходьбы. Это обеспечивается за счет того, что на боковой поверхности первой втулки установлен цилиндрический поворотный байонетный замок, фиксирующий положение поршня посредством запирания оси подвижного поршня в двух направленных перпендикулярно карманах Т-образных продольных пазов, выполненных на замке, а длина пазов соответствует ходу поршня при ходьбе. При этом байонетный замок устанавливается на втулке, например, посредством резьбового соединения путем навинчивания, что обеспечивает возможность замку поворачиваться вокруг втулки. В тоже время замок подпружинен относительно втулки, так как связан с ней упругой связью, например, упругой пружиной кручения со стороны винтовой заглушки с исходным недеформированным состоянием этой пружины в положении байонетного замка, в котором ось подвижного поршня может свободно перемещаться в продольной части Т-образных пазов при ходьбе. Ось запирается в карманах посредством ручного поворота замка перед приседанием, фиксируется за счет контактного взаимодействия с карманом при приседании и автоматически высвобождается после вставания в положении «стоя» путем обратного поворота замка за счет действия пружины.
Вариантом исполнения шарнирного модуля может служить реализация прямого и обратного поворотов байонетного замка с помощью электропривода, управление которым выполняет оператор с помощью аппаратуры системы управления. В данном случае привод байонетного замка выполняет вспомогательную сервисную функцию, поддерживая алгоритм работы активного привода сжатия пружины накопителя упругой энергии обеспечивающего основную функцию - разгрузку опорно-двигательного аппарата оператора.
В свою очередь, удобство работы оператора в экзоскелете достигается также путем использования в качестве человеко-машинного интерфейса, реализующего варианты исполнения с контактным ручным способом, например, кнопочным, или бесконтактным, например, голосовым способом подачи команд, с визуальным способом считывания информации отображенной на сигнальном дисплее, размещенном, например, на руке, а также в вариантах исполнения с использованием в качестве устройства отображения информации «смарт очки» или нашлемный дисплей с беспроводной технологией связи с блоком системы управления. При этом целесообразно использовать звуковую сигнализацию для подтверждения приема команд, их выполнения или оповещения об аварийных ситуациях.
Задача исключения зависимости рабочих параметров экзоскелета от отрицательных температур эксплуатации решается тем, что температура корпуса цилиндра поддерживается на требуемом заданном уровне независимо от отрицательной температуры окружающей среды за счет оснащения его электронагревательным элементом, который может быть выполнен, например, в виде гибкой плоской силиконовой ленты с металлическим или композиционным электрорезистивным материалом, либо в виде гибкого пленочного нагревателя в защитной полимерной изоляции, например, силиконовой. Причем нагреватель вплотную наматывается на цилиндр газовой пружины, а поверх нагревателя соосно цилиндру устанавливается защитный цилиндрический кожух с теплоизоляционным слоем, внутри примыкающим к нагревателю. При этом в одном варианте исполнения нагреватель снабжен датчиком температуры, с помощью которого система управления выполняет сервисную функцию по поддержанию заданной температуры газа внутри цилиндра газовой пружины. В другом варианте исполнения нагревателя в качестве электрорезистивного элемента используется настроенный на заданную температуру саморегулирующийся композитный электронагреватель с нелинейной зависимостью электросопротивления от температуры.
Задача повышения эффективности работы экзоскелета решается путем экономии энергии бортового источника за счет управления сжатием накопителя энергии в зависимости от собственного веса оператора и веса груза. При этом меньшему весу оператора и меньшему весу груза будет соответствовать меньшее сжатие и, соответственно, экономия энергии бортового источника энергии, также при сжатии накопителя будет учитываться повышение возвратной силы газовой пружины при работе в условиях повышенной положительной температуры. Теплоизоляционный слой внутри защитного кожуха также повышает эффективность работы, т.к. способствует экономии расхода энергии за счет снижения тепловых потерь при работе нагревателя. В то же время, дополнительный нагрев газа внутри газовой пружины выше нормальной эксплуатационной температуры (обычно 20°С, при которой была изготовлена пружина) позволяет увеличивать возвратную силу газовой пружины и тем самым повысить эффективность за счет увеличения степени разгрузки опорно-двигательного аппарата оператора при подъеме тяжелых и габаритных грузов.
Сущность изобретения поясняется следующими рисунками и чертежами.
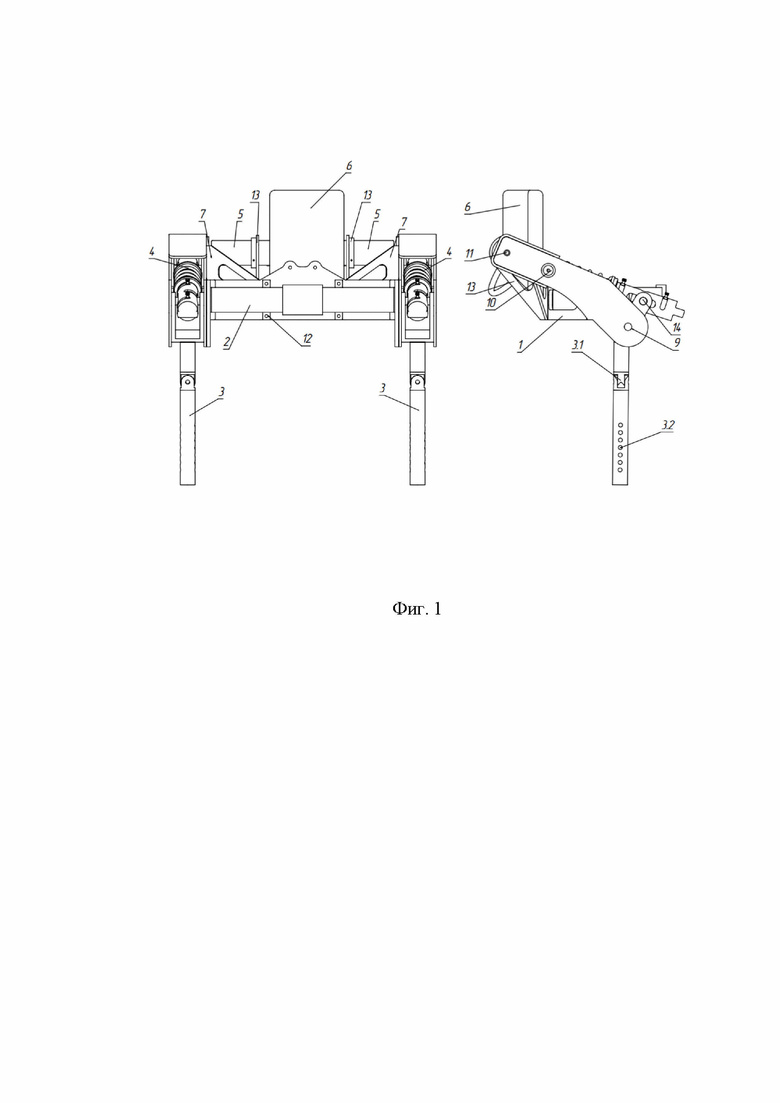
На фиг. 1 показан тазобедренный шарнирный модуль на видах спереди и сбоку.
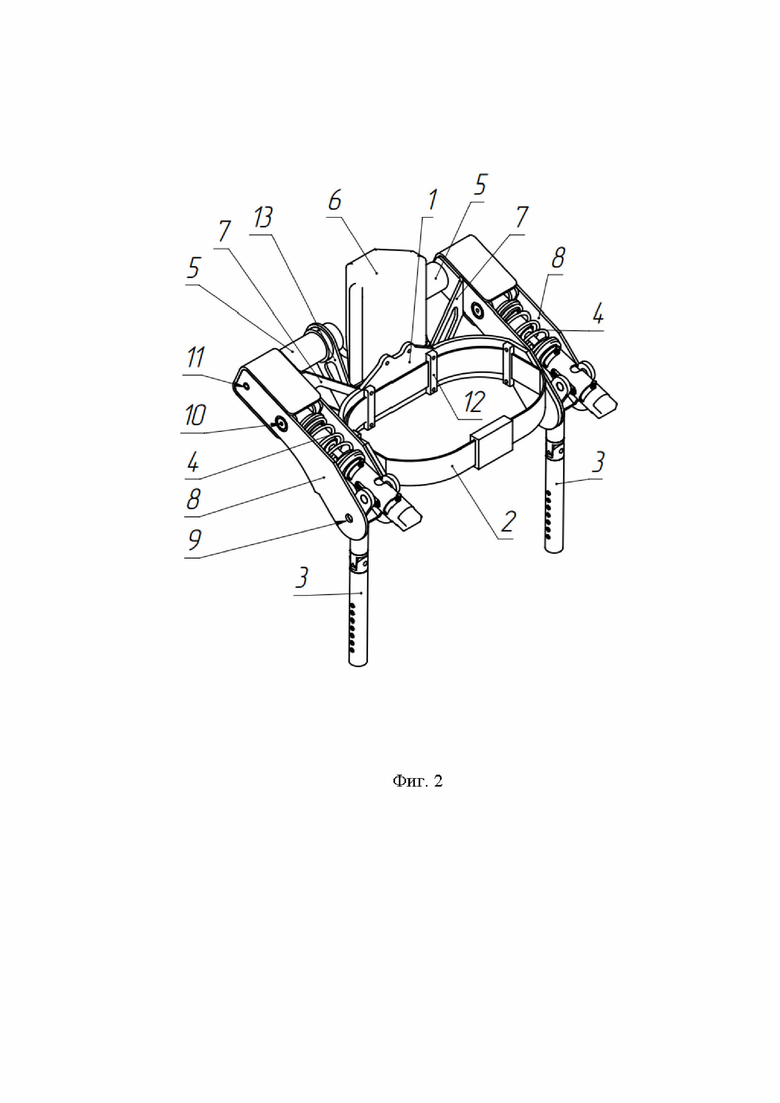
На фиг. 2 показан тазобедренный шарнирный модуль в аксонометрии в варианте исполнения с двумя вращательными приводами сжатия пружины накопителя упругой энергии.
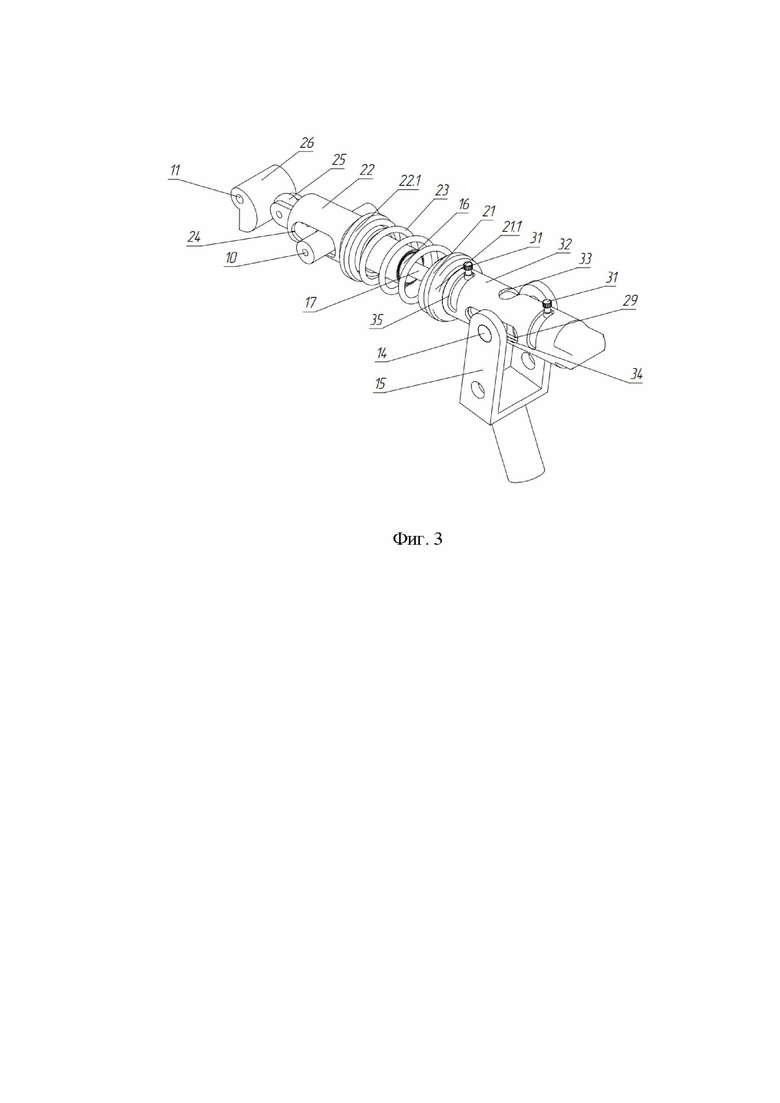
На фиг. 3 в аксонометрии показан накопитель упругой энергии с кулачковым механизмом сжатия пружины.
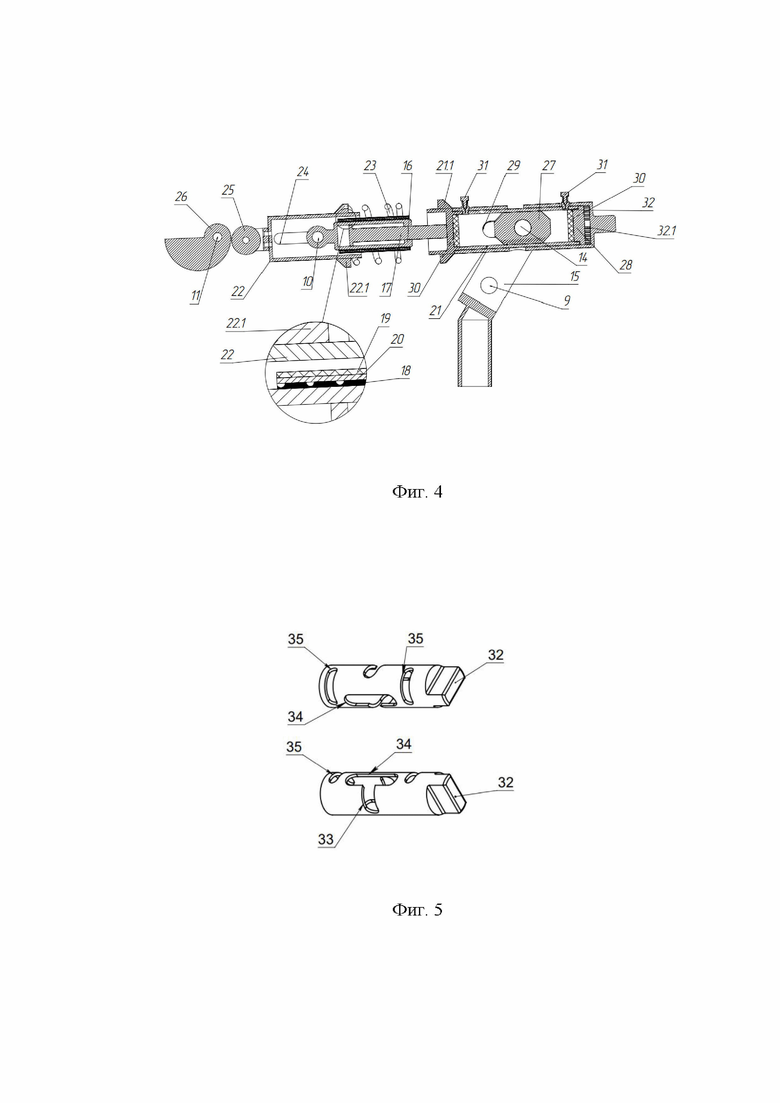
На фиг. 4 показан накопитель упругой энергии в разрезе.
На фиг. 5 показан поворотный цилиндрический байонетный замок. Приведены два повернутых положения замка.
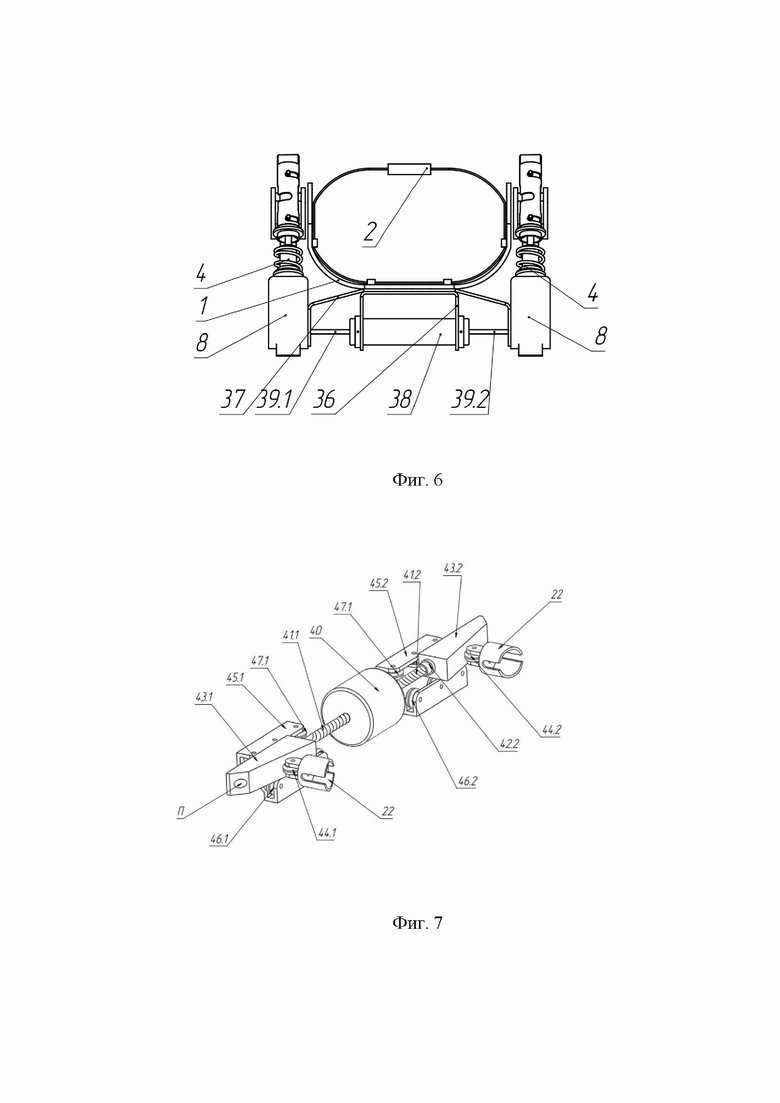
На фиг. 6 показан вариант исполнения тазобедренного шарнирного модуля, вид сверху, с одним вращательным приводом сжатия пружины накопителя упругой энергии с одновременным вращением обоих кулачковых механизмов.
На фиг. 7 показана схема варианта исполнения в аксонометрии тазобедренного шарнирного модуля с клиновыми механизмами сжатия пружин накопителей упругой энергии.
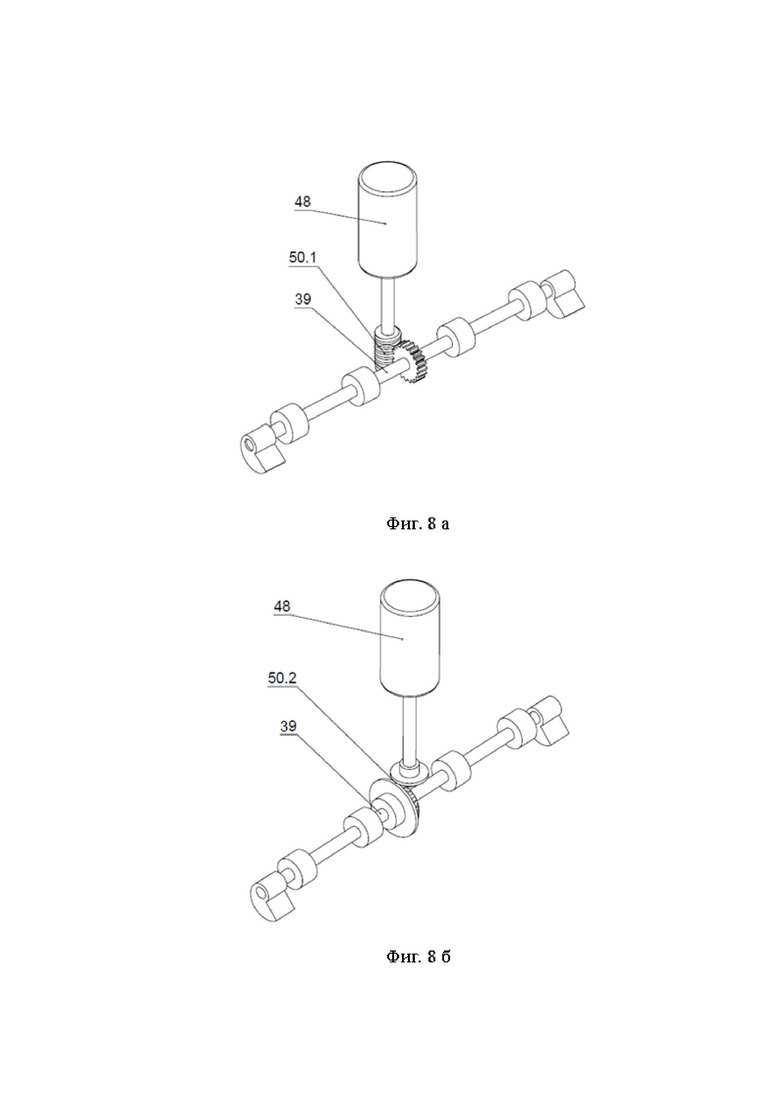
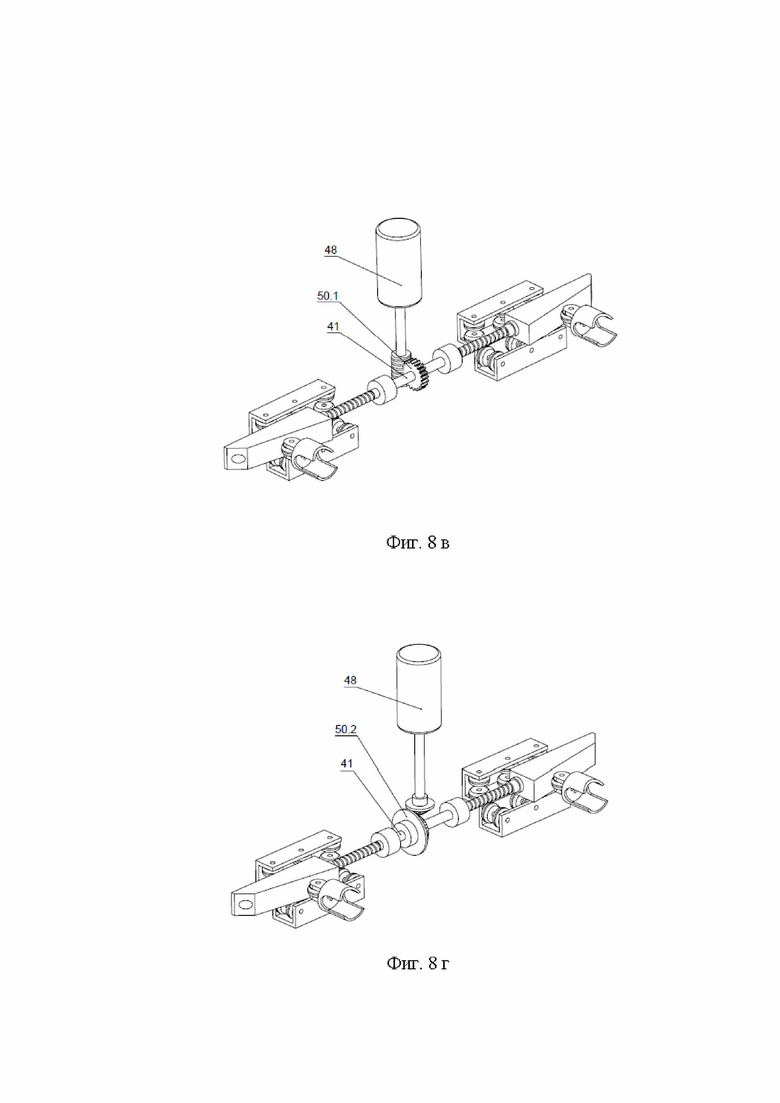
На фиг. 8 показаны схемы вариантов исполнения тазобедренного шарнирного модуля с перпендикулярным расположением оси привода по отношению к приводным валам нажимных механизмов сжатия пружин накопителей упругой энергии с передачей вращения к приводному валу кулачкового механизма сжатия пружин накопителей упругой энергии с помощью червячной передачи - фиг. 8а и с помощью конической передачи - фиг. 8б, а с передачей вращения к приводному валу клинового механизма сжатия пружин накопителей упругой энергии с помощью червячной передачи - фиг. 8в и с помощью конической передачи - фиг. 8г.
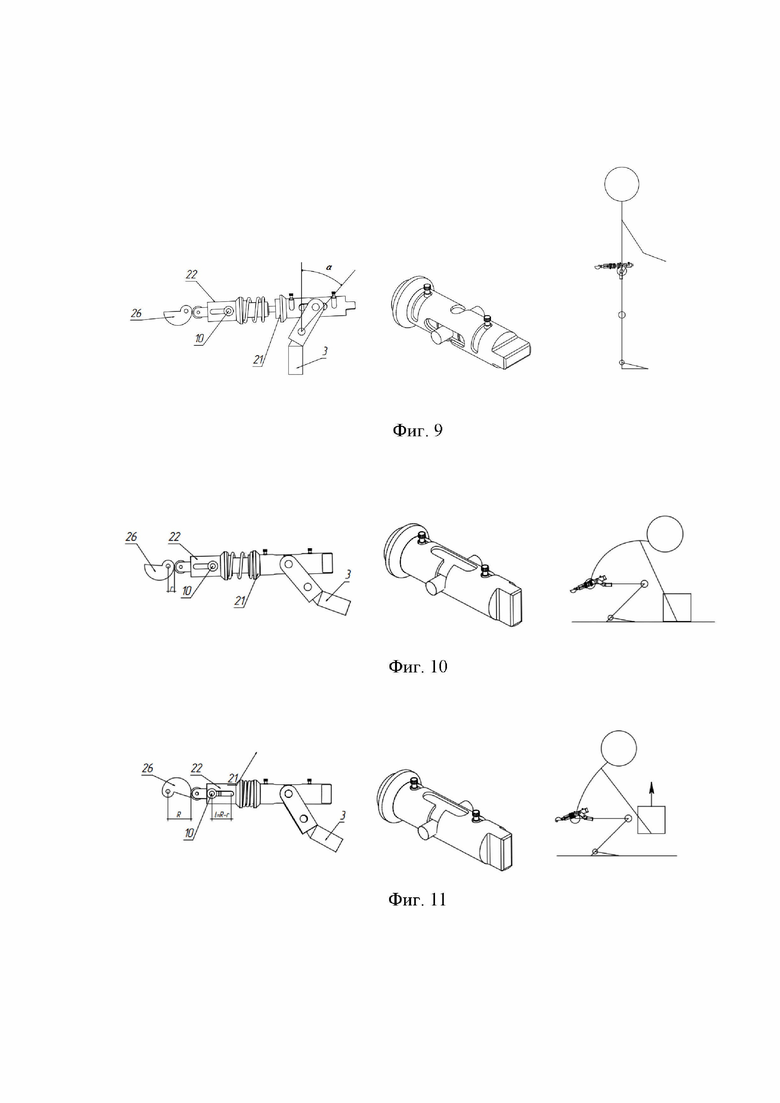
На фиг. 9 показано состояние накопителя упругой энергии при ходьбе.
На фиг. 10 показано состояние накопителя упругой энергии в положении приседа до начала работы привода сжатия пружины накопителя упругой энергии
На фиг. 11 показано состояние накопителя упругой энергии в положении приседа после срабатывания привода сжатия пружины накопителя упругой энергии
Тазобедренный шарнирный модуль экзоскелета включает в себя жесткий С-образный каркас 1 с поясным ремнем 2 для крепления его на операторе в области таза, два бедренных звена 3 с манжетами для фиксации их на бедрах оператора (на рисунке не показаны для простоты) с показанным условно без детализации шарнирным узлом 3-1, обеспечивающим отведение бедренного звена во фронтальной плоскости и вращение вокруг своей оси и с (показанными условно в виде ряда установочных отверстий) механизмами 3-2 регулировки длины бедренных звеньев, два - правый и левый - накопителя упругой энергии 4, два электромеханических вращательных привода 5 сжатия пружины накопителя энергии, а также блок аппаратуры системы управления с аккумуляторной батареей 6. На каркасе 1 справа и слева с помощью двух кронштейнов 7 жестко закреплены два коробчатых корпуса 8 в которых установлены оси 9, 10 и 11, направленные перпендикулярно сигитальной плоскости. Ремень 2 фиксируется на каркасе 1 с помощью скоб 12. Для комфортного ношения каркаса внутри него устанавливается мягкая упругая подкладка (на рисунке не показана).
На осях 9 сформированы шарниры поворота бедренных звеньев в сигитальной плоскости, а оси 11 являются осями вращения электромеханических вращательных приводов 5, которые в свою очередь закреплены на коробчатых корпусах 8 и подкреплены в пространстве с помощью кронштейнов 13 установленных на каркасе 1. Коробчатые корпуса 8 вмещают накопители энергии 4, которые одними концами шарнирно установленные на осях 10, а вторым концами шарнирно установлены на осях 14, закрепленных в выполненных в виде вилок наклонных стойках 15 бедренных звеньев 3.
Каждый накопитель упругой энергии 4 включает в себя типовую промышленную газовую пружину, состоящую из герметичного цилиндра 16 в котором перемещается шток 17, тонкий гибкий нагреватель 18 с электрорезистивным элементом и датчиком температуры, выполненном, например, на основе термопары, поверх которого установлен цилиндрический защитный кожух 19 с теплоизоляционным слоем 20 на внутренней поверхности кожуха, две концентрично установленные вокруг цилиндра и подвижные вдоль него трубчатые цилиндрические втулки 21, 22 с установленными на них винтовыми кольцевыми упорами 21.1 и 22.1 между которыми размещена пружина сжатия 23, причем первая втулка 21 закреплена на конце штока 17 газовой пружины, а вторая втулка 22 размещена со стороны шарнирной опоры цилиндра ось которой 10 неподвижно закреплена в корпусе 8 на каркасе 1. На конце второй втулки 22 со стороны шарнирной опоры цилиндра выполнены два диаметральных направляющих паза 24 в которых размещена ось 10 шарнирной опоры цилиндра и на подшипнике установлен бочкообразный опорный ролик 25 ось вращения которого параллельна оси 10 шарнирной опоры цилиндра. Ролик 25 контактирует со спиралевидным нажимным кулачком 26, который жестко закреплен на оси 11 и поворачивается вращательным приводом 5. В свою очередь в первой цилиндрической втулке 21 установлен подвижный поршень 27 с кольцевыми уплотнениями на концах. На торце втулки 21 установлена винтовая заглушка 28, а на боковой поверхности втулки выполнены два диаметрально расположенных паза 29 в которых размещены концы оси 14 установленной в поршне 27, которые в свою очередь шарнирно закреплены в соответствующих отверстиях вилки 15. На обоих концах внутреннего цилиндра втулки 21 вмещающего поршень 27 на дне установлены эластичные упорные элементы 30, а в районе дна обоих цилиндров в боковой поверхности первой втулки установлены два иголчатых клапана 31 с резьбовой регулировкой проходного сечения клапана, а на концах поршня в зоне клапана выполнены окружные фаски. При этом на боковой поверхности втулки 21 установлен цилиндрический поворотный байонетный замок 32 фиксирующий положение поршня посредством запирания оси 14 в двух направленных перпендикулярно карманах 33 Т-образных продольных пазов 34 длина которых соответствует ходу поршня. При этом байонетный замок 32 устанавливается на втулке 21, например, посредством резьбового соединения путем навинчивания, для чего на втулке 21 выполнен внешний резьбовой участок, а на замке 32 соответствующий внутренний резьбовой участок (на фиг. 4 не показаны). При этом запирающие карманы 33 продольных пазов 34 выполнены с наклоном, соответствующим углу наклона винтовой линии резьбы, а на замке 32 выполнены тангенциальные пазы 35 для размещения в них иголчатых клапанов 31 при поворотах байонетного замка 32.
В то же время замок 32 подпружинен относительно втулки 21, т.е связан с ней упругой связью, например, упругой пружиной кручения 32.1 со стороны винтовой заглушки 28, как показано на фиг. 4, с исходным не деформированным состоянием пружины 32.1 в положении байонетного замка в котором ось подвижного поршня может свободно перемещаться в пазах 34. Эта же упругая связь между замком 32 и втулкой 21 может быть реализована со стороны кольцевых упоров 21.1. Таким образом, в положении оператора «стоя», когда ось 14 подвижного поршня 27 находится напротив карманов 33, ось 14 может быть зафиксирована относительно втулки 21 путем принудительного, например, ручного поворота байонетного замка 32 следствием которого является попадание оси 14 в карманы 33. При этом при поступательном движении оси 14 при приседании она сразу контактирует с пазом 33 что фиксирует положение замка 32. Освобождение осей происходит автоматически под действием упругости пружины 32.1 путем обратного поворота замка 32 при нахождении осей напротив карманов 33 в положении стоя.
Вариант исполнения тазобедренного шарнирного модуля может быть выполнен путем реализации аналогичной приведенной выше упругой связи замка 32 с втулкой 21 со стороны кольцевого упора 21.1.
Вариант исполнения тазобедренного шарнирного модуля может быть выполнен путем реализации прямого и обратного поворотов байонетного замка с помощью установленного на корпусе 8 вращательного привода посредством любого известного механизма передачи вращения к замку 32, например, посредством зубчатой или зубчатой ременной передачи.
Вариант исполнения тазобедренного шарнирного модуля с одним жестко закрепленным на каркасе 1 с помощью кронштейнов 36, 37 электромеханическим вращательным приводом 38 с двусторонним выходом вала, который в свою очередь соединен с осями 39.1, 39,2 на которых установлены кулачки 26 (см. фиг. 3, 4) механизма сжатия пружины 23 накопителя 4 приведен на фиг. 6. Блок аппаратуры системы управления с аккумуляторной батареей для простоты не показаны.
На фиг. 7 показана схема варианта исполнения тазобедренного шарнирного модуля с клиновыми механизмами сжатия пружин сжатия накопителей упругой энергии с применением одного жестко закрепленного на каркасе 1 электромеханического вращательного привода 40 с винтовой в любом известном исполнении передачей винт 41 - гайка 42 линейного привода сжатия пружин 23 накопителя упругой энергии 4, который выполнен на основе электродвигателя с двусторонним выходом вала, концы которого соединены с соосными ему правым 41.1 и левым 41.2 ходовыми винтами с противоположными направлениями хода витков резьбы. Ходовые гайки 42,1, 42,2 соединены каждая со своим нажимным клином 43.1 и 43.2 с которыми контактируют бочкообразные нажимные ролики 44. В каждом клине выполнено полость «П» в которую свободно входит соответствующий винт. При вращении вала двигателя гайки 42.1 и 42.2 винтовых передач с клиньями 43.1 и 43.2 перемещаются в противоположных направлениях взаимодействуя с роликами 44.1, 44.2 и согласованно приводят их в движение в одном направлении. Ось вращения привода направлена параллельно осям 10 шарнирных опор цилиндров газовых пружин, а оси вращения бочкообразных опорных роликов 44, напротив, направлены перпендикулярно оси 10 шарнирной опоры цилиндра. Каждый клин 431.1 и 43.2 опирается на жестко закрепленные на каркасе 1 направляющие 45.1 и 45.2 с двумя рядами опорных роликов, расположенных во взаимно перпендикулярных плоскостях 46.1,46.2 и 47.1, 47.2. Такая трехточечная схема опирания клиньев обеспечивает только поступательное движение клиньев вдоль оси винтов.
На фиг. 8 показана схема варианта исполнения тазобедренного шарнирного модуля с одним закрепленным на спинном каркасе 1 вращательным электромеханическим приводом 48 ось вращения которого направлена перпендикулярно единому приводному, установленному в подшипниковых опорах, валу любого из рассмотренных выше типов нажимных механизмов сжатия пружин 23 накопителей упругой энергии, причем привод 48 может передавать вращение приводному валу любого нажимного механизма посредством любой их известных соответствующих механических передач 50, например, червячной 50.1 или конической 50.2 передачи. При этом на фиг. 8 приведены все возможные сочетания признаков выполнения изобретения, а именно:
схема исполнения тазобедренного шарнирного модуля с перпендикулярным расположением оси привода 48 по отношению к приводному валу 39 кулачкового механизма сжатия пружин сжатия накопителей упругой энергии с червячной передачей 50.1 показана на фиг. 8 а, а с конической передачей 50.2 на фиг. 8 6,
схема исполнения тазобедренного шарнирного модуля с перпендикулярным расположением оси привода 48 по отношению к приводному валу 41 клинового механизма сжатия пружин сжатия накопителей упругой энергии с червячной передачей 50.1 показана на фиг. 8 в, а с конической передачей 50.2 - на фиг. 8 г.
В качестве электродвигателей для рассмотренных вариантов исполнения тазобедренного шарнирного модуля с одним приводом может быть использован бескорпусной бесколлекторный двигатель с полым ротором, что обеспечит простоту конструктивной компоновки и позволит снизить вес привода.
Вариант возможного исполнения модуля заключается в реализации электронагревателя 18 с применением в нем саморегулирующегося композитного электрорезистивного элемента с нелинейной температурной характеристикой зависимости электросопротивления от температуры, настроенного на заданную эксплуатационную температуру. В качестве такого саморегулирующегося элемента, являющаяся в данном случае и своеобразным датчиком температуры, например, может быть использована промышленно выпускаемая широким рядом производителей саморегулирующаяся электрическая нагревательная лента, для защиты от замерзания или поддержания требуемой температуры трубопроводов и емкостей. Применение такого нагревателя позволит упростить выполнение сервисной функции по поддержанию рабочих характеристик накопителя упругой энергии независимо от внешних температурных факторов среды.
Тазобедренный шарнирный модуль в составе экзоскелета работает следующим образом. При ходьбе оператора (см фиг. 9) в экзоскелете происходят свободные повороты в пределах угла а бедренного звена 3 относительно каркаса 1 вместе с бедром оператора за счет закрепления звена 3 на бедре с помощью манжет с регулируемой степенью обжатия бедра, исключающего ослабление кинематической связи звена 3 и бедра оператора. Этот режим обеспечивается соответствующим положением байонетного замка в позиции «открыто», при котором ось 14 подвижного поршня 27 свободно перемещается в пазах первой втулки 29 и байонетного замка 34, длина которых соответствует, например, самому широкому шагу (см. фиг. 4, 5). В конечных точках движения поршня происходит смягчение контакта за счет упругого взаимодействия поршня 27 с эластичными прокладками 30 и вязкого сопротивления воздуха в полости между цилиндром втулки и поршнем 27, который истекает через игольчатый клапан 31. Степень демпфирования настраивается путем регулировки проходного сечения между контактной парой клапана «седло-игла» вручную вращением иглы по резьбе клапана.
При необходимости выполнения приседания оператора в экзоскелете оператор принимает позу «стоя» вертикально при котором пазы 33 байонетного замка расположены напротив осей 14 после чего оператор вручную поворачивает оба правый и левый байонетные замки 32 и фиксирует оси 14 в карманах 33 (см. фиг. 5) и начинает приседание, при этом замки зафиксированы от поворота.
В варианте исполнения модуля с приводом поворота замка 32 оператор любым из предусмотренных предложенным изобретением вариантом подает команду приводу на поворот замка 32 при котором оси 14 фиксируются в карманах 33. Далее оператор приседает желательно с максимальным расслабление мускулатуры, происходит поворот бедренного звена 3 относительно каркаса 1 (фиг. 10) в результате чего втулки 21 и 22 сближаются и в конечной точке приседа происходит контакт их кольцевых упоров 21.1 и 22.1 с торцами пружины 23. Оператор захватывает груз руками. Перед началом работы привода кулачок находится в исходном положении, контактируя с нажимным роликом 25 в точке с радиусом г. Далее оператор подает команду на включение приводов сжатия пружин в любом варианте их исполнения после чего срабатывает механизм сжатия пружины 23 путем поступательного движения втулки 22 за счет работы привода любого из предложенных вариантов механизма сжатия пружины 23. При этом перед началом работы привода кулачок находится в исходном положении, контактируя с нажимным роликом 25 в точке с радиусом г. На фиг. 11 показан кулачковый механизм в конечном положении кулачка, при этом разность конечного контактного радиуса R и начального г равна длине паза 24 втулки 22. Система управления подает звуковой сигнал получения команды с отображением информации о получении команды на сигнальном дисплее в любом варианте исполнения.
В случае работы при отрицательных температурах воздуха оператор предварительно перед началом работы подает команду электронагревателю 18 на поддержание заданной рабочей температуры цилиндра газовой пружины и, соответственно, воздуха в ней. Информация о готовности накопителя энергии к работе отображается аналогичным образом.
Далее, при полном срабатывание механизма сжатия пружины 23 накопителя, о чем информация отображается на сигнальном дисплее и подается звуковой сигнал, оператор встает с грузом за счет высвобождения упругой энергии накопителей и работы частично мышечного аппарата оператора. Можно рассматривать этот вариант работы оператора в экзоскелете как подъем груза, вес которого выше или равен расчетному.
В случае же когда вес груза меньше расчетного возникающие в ходе работы приводов сжатия пружин компенсирующие моменты в тазобедренном шарнире скомпенсируют вес груза до полного срабатывания механизмов сжатия и оператор, почувствовав превышение компенсирующего момента, может начать вставание до полного срабатывания механизмов сжатия пружин или же дождавшись полного сжатия пружин и получения соответствующего сигнала. После принятия вертикальной позы контакт осей 14 и карманов 33 замков 32 ослабевает и срабатывает пружина 32.1 или привод замка по команде оператора переводящие замок 32 в исходное положение, что освобождает оси 14 (см фиг. 9). Оператор в экзоскелете готов к движению.
При этом, степень срабатывания приводов сжатия пружин накопителей может быть разбита на несколько градаций, соответствующих по величине долям максимального расчетного груза. В этом случае оператор, основываясь, например, на предварительной информации о величине груза, или на основе собственного опыта, перед подачей команды выбирает нужную команду и подает ее к исполнению. Такой подход позволит рационально и экономно расходовать энергию аккумуляторных батарей, повышая тем самым эффективность использования экзоскелета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| Экзоскелет | 2023 |
|
RU2830368C1 |
| Экзоскелет | 2023 |
|
RU2833109C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| ТАЗОБЕДРЕННЫЙ УЗЕЛ ЭКЗОСКЕЛЕТА ИЛИ ОРТЕЗА | 2017 |
|
RU2655189C1 |
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
Изобретение относится к медицинской технике, а именно к экзоскелетам. Тазобедренный шарнирный модуль экзоскелета включает в себя С-образный спинной каркас с поясным ремнем для крепления его на операторе в области таза, два шарнирных узла и два бедренных звена с механизмами регулировки длины бедренных звеньев и с манжетами для фиксации бедренных звеньев на бедрах оператора, два накопителя упругой энергии, один конец каждого из которых шарнирно соединен с спинным каркасом, а вторые подвижные концы соединены с шарниро, обеспечивающим поворот бедренного звена в сигиттальной плоскости. В состав каждого накопителя упругой энергии дополнительно к газовой пружине включена винтовая пружина сжатия, установленная концентрично и подвижно вокруг цилиндра газовой пружины с установленным на нем нагревателем с электрорезистивным элементом и датчиком температуры, поверх которого установлен цилиндрический защитный кожух с теплоизоляционным слоем на примыкающей к нагревателю внутренней поверхности, а также две концентрично установленные вокруг цилиндра газовой пружины и подвижные вдоль цилиндра газовой пружины трубчатые цилиндрические втулки с регулируемыми по положению винтовыми упорами на внешних поверхностях трубчатых цилиндрических втулок, между которыми размещена пружина сжатия, причем первая втулка закреплена на подвижном конце штока газовой пружины, а вторая размещена со стороны шарнирной опоры цилиндра, ось которой неподвижно закреплена на спинном каркасе и направлена перпендикулярно сигиттальной плоскости. В состав модуля включены закрепленные на спинном каркасе два электромеханических вращательных привода сжатия пружины накопителя энергии с кулачковыми механизмами, выполненными с нажимными элементами, контактирующими с опорными роликами, бортовая аккумуляторная батарея и блок аппаратуры системы управления экзоскелетом с человеко-машинным интерфейсом между оператором и системой управления электроприводами. Выполненная в виде вилки наклонная стойка на бедренном звене шарнирно соединена осью, установленной в подвижном поршне с кольцевыми уплотнениями на концах, который установлен внутри первой цилиндрической втулки с винтовой заглушкой на конце первой втулки, в которой выполнены два продольных диаметральных паза для перемещения в двух продольных диаметральных пазах обоих концов шарнирной оси поршня. Осевой ход поршня внутри втулки соответствует перемещению стойки в сигиттальной плоскости при поворотах бедренного звена при ходьбе оператора в экзоскелете. На обоих концах внутреннего цилиндра первой втулки, вмещающего поршень, на дне замкнутых полостей внутреннего цилиндра установлены эластичные упорные элементы, а в районе дна обоих полостей в боковой поверхности первой втулки установлены два игольчатых клапана с резьбовой регулировкой проходного сечения клапана, на концах поршня выполнены кольцевые фаски, а на боковой поверхности первой втулки установлен посредством резьбового соединения цилиндрический поворотный байонетный замок, фиксирующий положение поршня. Техническим результатом является снятие нагрузки с опорно-двигательного аппарата оператора в экзоскелете во время выполнения такелажных работ, особенно при подъеме тяжелых и/или объемных предметов с пола, обеспечение независимости от антропоморфных особенностей оператора, в частности от его веса и размеров, обеспечение удобства работы оператора в экзоскелете при ходьбе, исключение зависимости рабочих параметров экзоскелета от отрицательных температур эксплуатации вплоть до предельной отрицательной рабочей температуры, повышение эффективности работы экзоскелета. 10 з.п. ф-лы, 14 ил.
1. Тазобедренный шарнирный модуль экзоскелета, включающий в себя С-образный спинной каркас с поясным ремнем для крепления его на операторе в области таза, два шарнирных узла и два бедренных звена с механизмами регулировки длины бедренных звеньев и с манжетами для фиксации бедренных звеньев на бедрах оператора, два накопителя упругой энергии, один конец каждого из которых шарнирно соединен с спинным каркасом, а вторые подвижные концы соединены с шарниром, обеспечивающим поворот бедренного звена в сигиттальной плоскости, отличающийся тем, что: в состав каждого накопителя упругой энергии дополнительно к газовой пружине включена винтовая пружина сжатия, установленная концентрично и подвижно вокруг цилиндра газовой пружины с установленным на нем нагревателем с электрорезистивным элементом и датчиком температуры, поверх которого установлен цилиндрический защитный кожух с теплоизоляционным слоем на примыкающей к нагревателю внутренней поверхности, а также две концентрично установленные вокруг цилиндра газовой пружины и подвижные вдоль цилиндра газовой пружины трубчатые цилиндрические втулки с регулируемыми по положению винтовыми упорами на внешних поверхностях трубчатых цилиндрических втулок, между которыми размещена пружина сжатия, причем первая втулка закреплена на подвижном конце штока газовой пружины, а вторая размещена со стороны шарнирной опоры цилиндра, ось которой неподвижно закреплена на спинном каркасе и направлена перпендикулярно сигиттальной плоскости, при этом на конце второй втулки со стороны шарнирной опоры цилиндра выполнены два диаметральных направляющих паза, в которых размещена ось шарнирной опоры цилиндра газовой пружины, на подшипнике установлен бочкообразный опорный ролик, ось вращения которого параллельна оси шарнирной опоры цилиндра; в состав модуля включены закрепленные на спинном каркасе два электромеханических вращательных привода сжатия пружины накопителя энергии с кулачковыми механизмами, выполненными с нажимными элементами, контактирующими с опорными роликами, а также бортовая аккумуляторная батарея и блок аппаратуры системы управления экзоскелетом с человекомашинным интерфейсом между оператором и системой управления электроприводами, при этом выполненная в виде вилки наклонная стойка на бедренном звене шарнирно соединена осью, установленной в подвижном поршне, с кольцевыми уплотнениями на концах, который установлен внутри первой цилиндрической втулки с винтовой заглушкой на конце первой втулки, в которой выполнены два продольных диаметральных паза для перемещения в двух продольных диаметральных пазах обоих концов шарнирной оси поршня, причем осевой ход поршня внутри втулки соответствует перемещению стойки в сигиттальной плоскости при поворотах бедренного звена при ходьбе оператора в экзоскелете, при этом на обоих концах внутреннего цилиндра первой втулки, вмещающего поршень, на дне замкнутых полостей внутреннего цилиндра установлены эластичные упорные элементы, а в районе дна обоих полостей в боковой поверхности первой втулки установлены два игольчатых клапана с резьбовой регулировкой проходного сечения клапана, на концах поршня выполнены кольцевые фаски, а на боковой поверхности первой втулки установлен посредством резьбового соединения цилиндрический поворотный байонетный замок, фиксирующий положение поршня посредством запирания при повороте замка оси поршня в двух направленных перпендикулярно карманам Т-образных продольных пазов, длина которых соответствует ходу поршня вместе с наклонной стойкой при ходьбе, запирающие карманы продольных Т-образных пазов выполнены с наклоном, соответствующим углу наклона винтовой линии резьбового соединения, на замке выполнены тангенциальные пазы для размещения в тангенциальных пазах игольчатых клапанов при поворотах байонетного замка.
2. Тазобедренный шарнирный модуль по п. 1, отличающийся тем, что применен один жестко закрепленный на спинном каркасе электромеханический вращательный привод сжатия пружин сжатия накопителей энергии, который выполнен на основе электродвигателя с двусторонним выходом вала, причем каждый конец вала соединен со своим поворотным нажимным кулачком, при этом ось вращения привода направлена параллельно оси опоры цилиндра газовой пружины.
3. Тазобедренный шарнирный модуль по п. 1, отличающийся тем, что в качестве каждого нажимного механизма привода сжатия пружины накопителя упругой энергии применена клиновая передача с линейным электромеханическим линейным приводом на базе передачи винт-гайка, при этом движущаяся поступательно вдоль вращающегося винта гайка соединена с нажимным клином, контактирующим с опорным бочкообразным роликом, установленным на второй втулке, при этом внутри каждого клина выполнена полость, в которую свободно входит соответствующий винт, а на спинном каркасе жестко закреплены продольные направляющие для клиньев с двумя рядами опорных роликов, расположенных во взаимно перпендикулярных плоскостях, причем оси вращения приводов направлены параллельно оси шарнирной опоры цилиндра газовой пружины, а ось вращения каждого бочкообразного опорного ролика направлена перпендикулярно оси опоры цилиндра газовой пружины.
4. Тазобедренный шарнирный модуль по п. 3, отличающийся тем, что применен один жестко закрепленный на спинном каркасе электромеханический винтовой линейный привод на базе передачи винт-гайка с клиновым механизмом сжатия пружин, выполненный на основе электровигателя с двусторонним выходом вала, концы которого соединены с соосными ему правым и левым ходовыми винтами с противоположными направлениями нарезки витков резьбы, при этом перемещающиеся в противоположных направлениях гайки винтовых передач соединены каждая со своим нажимным клином, взаимодействующим с соответствующим бочкообразным роликом, установленным на второй втулке.
5. Тазобедренный шарнирный модуль по п. 2 или 4, отличающийся тем, что в электромеханических приводах применен бесколлекторный бескорпусный электродвигатель с полым ротором.
6. Тазобедренный шарнирный модуль по п. 2 или 4, отличающийся тем, что ось вращательного электромеханического привода размещена перпендикулярно единому приводному валу нажимных механизмов, причем привод выполнен с возможностью передачи вращения валу посредством червячной или конической передачи.
7. Тазобедренный шарнирный модуль по п. 1, отличающийся тем, что применен электронагреватель с саморегулирующимся композитным электрорезистивным элементом.
8. Тазобедренный шарнирный модуль по п. 1, отличающийся тем, что в качестве элементов человеко-машинного интерфейса применены ручные органы подачи команд управления и визуальное считывание информации о состоянии экзоскелета, отображенной на сигнальном дисплее, а также звуковая сигнализация, подтверждающая прием команд, выполнение команд управления и оповещающая об аварийных ситуациях.
9. Тазобедренный шарнирный модуль по п. 1, отличающийся тем, что в качестве элемента человеко-машинного интерфейса применена бесконтактная голосовая подача команд управления.
10. Тазобедренный шарнирный модуль по п. 8 или 9, отличающийся тем, что в качестве сигнального дисплея используются смарт-очки с беспроводной связью с системой управления экзоскелетом.
11. Тазобедренный шарнирный модуль по п. 8 или 9, отличающийся тем, что в качестве сигнального дисплея использован нашлемный дисплей, устанавливаемый на защитной каске с беспроводной связью с системой управления экзоскелетом.
| US 20220250234 A1, 11.08.2022 | |||
| US 20190240524 A1, 08.08.2019 | |||
| US 11612506 B2, 28.03.2023 | |||
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| US 11413210 B2, 16.08.2022 | |||
| US 10736810 B2, 11.08.2020. | |||

