Область техники, к которой относится изобретение
Представленные здесь варианты осуществления относятся к позиционированию целевых устройств в системах беспроводной связи, таких как сотовые сети. В частности, варианты осуществления относятся к целевому устройству, сетевому узлу и способам, выполняемым ими, для управления позиционированием целевого устройства.
Уровень техники
Позиционирование оборудования пользователя (User Equipment, UE), которое может также упоминаться как позиционирование целевого устройства, признается как важный признак для сетей LTE из-за его потенциальных возможностей для крупных коммерческих применений (например, интеллектуальное транспортирование, индустрия развлечений, промышленная автоматизация, робототехника, работа с дистанционным управлением, здравоохранение, умная парковка и так далее), а также его важности для выполнения требований документа US FCC E911.
Позиционирование в системе LTE поддерживается архитектурой, показанной на фиг. 1, в которой прямые взаимодействия между UE и сервером определения местоположения (Е-SMLC) осуществляются по протоколу позиционирования в системе LTE (LTE Positioning Protocol, LPP)). Кроме того, существуют также взаимодействия между сервером определения местоположения и eNodeB по протоколу LPP, в некоторой степени поддерживаемые взаимодействиями между eNodeB и UE по протоколу радиоуправления ресурсами (Radio Resource Control, RRC).
В LTE рассматриваются следующие способы позиционирования:
- Расширенный идентификатор ячейки (Enhanced Cell ID). По существу, информация идентификатора ячейки для соединения UE с сервисной областью сервисной ячейки и дополнительная информация для определения положения с более высокой степенью разрешения.
- Поддерживаемая GNSS. Информация GNSS, извлекаемая UE, поддерживаемая информацией о помощи, предоставляемой для UE от Е-SMLC.
- OTDOA (Observed Time Difference of Arrival, наблюдаемая разница во времени прибытия). UE оценивает разницу во времени прибытия опорных сигналов от различных базовых станций и передает ее на Е-SMLC для мультилатерации.
- UTDOA (Uplink TDOA, TDOA восходящего канала). От UE требуется передавать сигнал определенной формы, который обнаруживается множеством блоков измерения местоположения (например, eNB), расположенных в известных местах. Результаты этих измерения передаются на Е-SMLC для мультилатерации
Раскрытие сущности изобретения
Задача представленных здесь вариантов осуществления заключается в улучшении характеристик сети беспроводной связи, в частности, посредством улучшения позиционирования целевого устройства.
В соответствии с первым подходом представленных здесь вариантов осуществления задача решается способом, выполняемым целевым устройством, для осуществления позиционирования целевого устройства. Целевое устройство получает от сетевого узла конфигурацию отчетности датчиков. Целевое устройство получает результаты измерений датчиков. Целевое устройство определяет объем отчетности датчиков, основываясь на полученных результатах измерений датчиков в соответствии с полученной конфигурацией отчетности датчиков. Целевое устройство передает сетевому узлу отчет о результатах измерений, содержащий результаты измерений датчиков в соответствии с определенным объемом отчетности. Отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
В соответствии со вторым подходом представленных здесь вариантов осуществления, задача решается способом, выполняемым сетевым узлом, для осуществления позиционирования целевого устройства. Сетевой узел передает целевому устройству конфигурацию отчетности датчиков. Сетевой узел получает от целевого устройства отчет о результатах измерений, содержащий результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством, основываясь на посланной конфигурации отчетности датчиков. Отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
В соответствии с третьим подходом представленных здесь вариантов осуществления, задача решается целевым устройством для выполнения способа определения местоположения целевого устройства. Целевое устройство выполнено с возможностью получения от сетевого узла конфигурации отчетности датчиков. Целевое устройство выполнено с возможностью получения результатов измерений датчиков. Целевое устройство выполнено с возможностью определения объема отчетности, основываясь на полученных результатах измерений датчиков, в соответствии с полученной конфигурацией отчетности датчиков. Целевое устройство выполнено с возможностью передачи сетевому узлу отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с определенным объемом отчетности. Отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
В соответствии с четвертым подходом представленных здесь вариантов осуществления, задача решается сетевым узлом для выполнения способа определения местоположения целевого устройства. Сетевой узел выполнен с возможностью передачи целевому устройству конфигурации отчетности датчиков. Сетевой узел выполнен с возможностью получения от целевого устройства отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством, основываясь на переданной конфигурации отчетности датчиков. Отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
В соответствии с пятым подходом представленных здесь вариантов осуществления, задача решается компьютерным программным продуктом, содержащим команды, которые, когда исполняются по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять способы в соответствии с представленными здесь вариантами осуществления.
В соответствии с шестым подходом представленных здесь вариантов осуществления, задача решается считываемым компьютером носителем, на котором хранится компьютерный программный продукт, содержащий команды, которые, когда исполняются по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять способы в соответствии с представленными здесь вариантами осуществления.
Поскольку целевое устройство определяет объем отчетности на основе полученных результатов измерений датчиков и полученной конфигурации отчетности датчиков, объем отчетности о результатах измерений датчиков, такой как, например, объем отчетности о результатах измерений IMU, может быть выполнен с возможностью адаптации к перемещениям целевого устройства. Таким образом, целевое устройство способно предоставлять более подробную информацию в очень мобильных сценариях, таких как, например, когда целевое устройство интенсивно движется, и менее подробную информацию, когда целевое устройство не движется или движется менее сложным способом. Таким образом, позиционирование целевого устройства может быть улучшено при сокращении объема данных, передаваемых по сети связи, что может увеличить пропускную способность сети связи.
Другое преимущество состоит в том, что посредством отчетности о результатах измерений датчиков сеть оказывается способной выполнять позиционирование, основываясь на этой вспомогательной информации от целевого устройства, такого, как, например, UE. Возможны также другие дополнительные параметры, такие как, например, вспомогательные данные OTDOA, которые могут изменяться, зная более точную информацию о поведения мобильности UE.
Определения
Сокращение Объяснение
A-GNSS Вспомогательная GNSS
E-CID Расширенная идентификация ячейки
GNSS Глобальная навигационная спутниковая система
IMU Инерционный измерительный блок
OTDOA Наблюдаемая разница во времени прибытия.
Краткое описание чертежей (дополнительно)
Фиг. 1 - блок-схема архитектуры позиционирования LTE;
Фиг. 2 - блок-схема измерения примерной временной последовательности;
Фиг. 3 - блок-схема вариантов осуществления сети беспроводной связи;
Фиг. 4a - блок-схема последовательности выполнения операций первого варианта осуществления способа, выполняемого целевым устройством;
Фиг. 4b - блок-схема последовательности выполнения операций первого варианта осуществления способа, выполняемого сетевым узлом;
Фиг. 5 – пример измерения, выполняемого акселерометром;
Фиг. 6 – пример измерения, выполняемого гироскопом;
Фиг. 7 – пример измерения, выполняемого барометром;
Фиг. 8 - блок-схема последовательности выполнения операций второго варианта осуществления способа, выполняемого целевым устройством;
Фиг. 9 - блок-схема последовательности выполнения операций второго варианта осуществления способа, выполняемого сетевым узлом;
Фиг 10 - блок-схема некоторых первых вариантов осуществления целевого устройства;
Фиг. 11 - схематичная блок-схема некоторых первых вариантов осуществления сетевого узла.
Осуществление изобретения
Представленные здесь варианты осуществления относятся к целевому устройству, сетевому узлу и способам, выполняемым ими для осуществления позиционирования целевого устройства. Целевое устройство получает от сетевого узла конфигурацию отчетности датчиков и дополнительно получает результаты измерений датчиков, связанные с целевым устройством. На основе полученных результатов измерений датчиков и полученной конфигурации отчетности датчиков, целевое устройство определяет объем отчетности, который может использоваться сетевым узлом для определения положения целевого устройства. Целевое устройство передает сетевому узлу отчет о результатах измерений, содержащий результаты измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения. Информация, содержащаяся в отчете о результатах измерений, может затем использоваться сетевым узлом для определения абсолютного положения целевого устройства.
На фиг. 3 представлен сценарий связи в примерной сети беспроводной связи, в которой могут использоваться, по меньшей мере, некоторые из представленных здесь вариантов осуществления. Сеть 100 беспроводной связи содержит одно или более целевых устройств 10. Целевые устройства 10 могут быть, например, UE, мобильными телефонами, смартфонами, портативными компьютерами, планшетными компьютерами, устройствами связи машинного типа (Machine-Type Communication, MTC), мобильными станциями, станциями (STA) или любыми другими устройствами, которые могут обеспечивать беспроводную связь и, таким образом, могут также упоминаться как беспроводное устройство. Целевое устройство 10 может осуществлять связь через сеть беспроводной связи, такую как локальная сеть (Local Area Network, LAN), такую как, например, сеть Wi-Fi или сеть радиодоступа (Radio Access Network, RAN), с одной или более базовыми сетями (core network, CN) 13, такими как, например, ядро развернутой пакетной сети (Evolved Packet Core, EPC) или ядро пятого поколения (5GC). Сеть 100 беспроводной связи дополнительно содержит сетевой узел 20, такой как, например, узел радиодоступа, например, точка доступа Wi-Fi или базовая радиостанция (radio base station, RBS), которая в некоторых сетях может также быть обозначена, например, как NodeB, eNodeB (eNB), или gNodeB (gNB), как в системе New Radio (NR). NR может также упоминаться как системы беспроводной связи пятого поколения (5G). Сетевой узел 20 обслуживает зону 115 покрытия, которая может также упоминаться как, например, ячейка, луч или группа лучей.
Инерционные измерительные блоки (IMU) получили распространение в смартфонах некоторое время назад для предоставления данных результатов измерений. Такие данные могут использоваться для поддержки позиционирования и ориентирования устройства вместе с другими результатами измерений, такими датчиками, как GNSS, магнитометр, барометр и т. д. С недавнего времени существует также интерес к средствам определения, чтобы конфигурировать и сообщать результаты измерений IMU на сервер определения местоположения. Сервер определения местоположения может находиться на сетевом узле 20.
IMU в целевых устройствах может быть основан на многоосевом акселерометре и гироскопе, обычно с тремя осями каждый. IMU может дополнительно обычно интегрироваться в устройство таким образом, что эти оси выравниваются с геометрией устройства, причем две оси выравниваются с горизонтальной плоскостью, когда телефон лежит плашмя, и одна ось направлена в направлении вверх, перпендикулярно к двум другим осям.
Существуют очевидные преимущества использования IMU для позиционирования, основанного на UE, где целевое устройство может объединять результаты измерений IMU вместе с другими результатами измерений для уточнения позиционирования. Термин "объединять" должен здесь интерпретироваться как объединение результатов измерений. Может также быть возможным использовать IMU для вспомогательного позиционирования UE, когда целевое устройство сообщает результаты измерений IMU сетевому узлу. Представленные здесь варианты осуществления могут использоваться для достижения гибкой отчетности IMU.
При конфигурации результатов измерений IMU и отчетов может быть неочевидным, что для некоторого периода времени результаты измерений могут быть представительными и быть пригодны для сервера определения местоположения, которому сообщают результаты измерений. По сравнению с решением, основанным на UE, решение, поддерживаемое UE, подразумевает измерения с задержкой, а также необходимость собирать воедино результаты наблюдений в сжатые отчеты, тогда как решение, основанное на UE, может извлечь выгоду из необработанных результатов данных измерений со своевременными обновлениями. Дополнительно, одни только результаты измерений IMU не могут обеспечивать абсолютное положение.
Представленные здесь варианты осуществления могут использоваться для получения гибкого объема отчетности об измерениях, такого как объем отчетности по результатам измерений IMU, где целевое устройство адаптирует содержание отчета, основываясь как на содержащихся фактических результатах измерений IMU, так и на фактических сопутствующих результатах измерений. Примерный сценарий показан на фиг. 2, где целевое устройство 10, такое как, например, UE, связано с сетевым узлом 20 и в котором целевое устройство 10 может делать одно или более измерений, таких как измерения IMU, в моменты 30 проведения измерений, имеющие место внутри временного окна, и от целевого устройства 10 может потребоваться сообщать информацию о результатах измерений, такую как информация IMU, в моменты 40 отчетности. В дальнейшем термины "целевое устройство" и UE могут использоваться взаимообразно.
Некоторые примерные этапы, которые могут выполняться целевым устройством, показаны на фиг. 4a.
Этап 100: целевое устройство 10 может получить запрос о возможностях, связанный с отчетностью о результатах измерений, такой как отчетность IMU. Запрос может быть получен, например, от сетевого узла 20.
Этот 100 соответствует этапу 300, обсуждаемому ниже со ссылкой на фиг. 8.
Этап 110: целевое устройство 10 может предоставлять свою информацию о возможностях, связанную с отчетностью о результатах измерений, такой как отчетность IMU. Информация о возможностях может, например, содержать информацию о том, какие датчики доступны целевому устройству 10 при выполнении измерений, какие измерения могут быть выполнены целевым устройством 10 и какая информация может быть предоставлена целевым устройством 10 на основе доступных датчиков и измерений, которые могут быть выполнены целевым устройством 10.
Этот этап 110 соответствует этапу 310, обсуждаемому со ссылкой на фиг. 8.
Этап 120: целевое устройство 10 получает конфигурацию отчета о результатах измерений, такую как, например, конфигурация отчета о IMU, от сетевого узла 20, дающую возможность гибкой отчетности о результатах измерений, такой как отчетность IMU. Тем самым целевое устройство 10 может адаптировать объем отчетности, который может также упоминаться как результаты измерений перемещений целевого устройства, о которых сообщается в отчетности. Для очень мобильных сценариев целевое устройство 10 может сообщать более подробную информацию, как, например, когда целевое устройство движется в значительной степени, и менее подробную информацию, когда целевое устройство не движется или движется менее сложным способом.
Этот этап 120 соответствует этапу 320, обсуждаемому со ссылкой на фиг. 8.
Этап 130: основываясь на полученной конфигурации отчетности о результатах измерений, целевое устройство 10 использует результаты измерений, такие, например, как результаты измерений IMU и/или другие сопутствующие результаты измерений, для определения необходимого объема отчетности.
Примеры способов определения объема отчетности содержат (ниже будет объяснено более подробно):
- Выбор одного или более временных сегментов, внутри которых результаты измерений IMU могут быть описаны параметрами модели. Например, результаты измерений IMU могут быть постоянными или линейными во временном сегменте.
- Выбор временных сегментов может быть основан на анализе результатов измерений гироскопов или магнитометра для идентификации временных сегментов, когда устройство имело постоянное ориентирование.
- Выбор временных сегментов может быть основан на анализе результатов измерений барометра, чтобы идентифицировать временные сегменты, если устройство имело постоянную высоту. Если результаты измерений временного сегмента считаются зашумленными и/или неопределенными, целевое устройство может вместо этого охарактеризовать статистические свойства результатов измерений IMU для временного сегмента.
Этот этап 130 подобен этапу 325 и 330, обсуждаемым со ссылкой на фиг. 8.
Этап 140: Основываясь на определенном объеме отчетности, целевое устройство компилирует отчет о результатах измерений и отправляет отчет сетевому узлу 20. Отчет о результатах измерений содержит результаты измерений датчиков в соответствии с определенным объемом отчетности.
Этот этап 140 подобен этапу 340, обсуждаемому со ссылкой на фиг. 8.
Некоторые примерные этапы, которые могут выполняться сетевым узлом 20, показаны на фиг. 4b.
Этап 200: сетевой узел 20 может дополнительно посылать целевому устройству 10 запрос о возможностях. Этот этап 200 соответствует этапу 400, обсуждаемому со ссылкой на фиг. 9.
Этап 210: сетевой узел 20 получает от целевого устройства 10 данные о возможностях, связанные с измерениями IMU и/или с отчетностью. Этот этап 210 соответствует этапу 410, обсуждаемому со ссылкой на фиг. 9.
Этап 220: сетевой узел 20 предоставляет целевому устройству 10 конфигурацию отчетности о результатах измерений, такую как конфигурация отчетности IMU, дающая возможность гибкой отчетности о результатах измерений. Конфигурация отчетности IMU может быть передана целевому устройству 10 и может обладать гибкостью объема отчетности. Этот этап 220 соответствует этапу 420, обсуждаемому со ссылкой на фиг. 9.
Этап 230: сетевой узел 20 получает отчет о результатах измерений IMU, соответствующий конкретному объему отчетности. Конкретный объем отчетности может быть объем отчетности, определенный целевым устройством 10. Этот этап 230 соответствует этапу 430, обсуждаемому со ссылкой на фиг. 9.
В другом варианте представленных здесь вариантов осуществления, результаты измерений датчиков, такие как, например, результаты измерений IMU, могут быть способны обеспечивать не абсолютное положение, а только относительное положение. В одном из вариантов осуществления целевое устройство 10 указывает опорное положение, с которым связываются относительные результаты измерений позиционирования и оценки. Оно может также содержать другие датчики, такие как магнитометр и светочувствительные датчики и сопутствующие результаты измерений. Оно может также содержать барометрический датчик.
Представленные здесь варианты осуществления позволяют адаптацию объема отчетности результатов измерений IMU к движениям целевого устройства 10. Таким образом, преимущество состоит в том, что целевое устройство 10 позволяет обеспечивать более подробную информацию в сценариях с высокой мобильностью и менее подробную информацию, когда устройство не движется или движется менее сложным способом
Другим преимуществом является тот факт, что посредством отчетности о результатах измерений IMU сеть способна выполнять позиционирование целевого устройства 10, основываясь на этой вспомогательной информации от целевого устройства 10. Могут иметься и другие параметры, такие как, например, вспомогательные данные OTDOA, которые могут модифицироваться по мере узнавания более точной информации, исходя из мобильного поведения целевого устройства 10.
Другое преимущество использования опорного положения, как здесь описано, состоит в том, что оно позволяет целевому устройству 10 информировать сервер определения местоположения об опорном положении датчика, с которым связаны результаты измерений.
На фиг. 5-7 показаны результаты измерений IMU в конкретном сценарии в качестве примера таких данных. Данные в этом примере были собраны во время катания на американских горках Уайлдфером в Колмердене, Швеция. На фиг. 5 показаны результаты измерений трехосным акселерометром, на фиг. 6 показаны результаты измерений трехосным гироскопом и на фиг. 7 показаны результаты измерений атмосферного давления. Приблизительно через 90 секунд после старта автомобиль начинает подъем на вершину, после явно выраженного спуска катание продолжается с ускорением в различных направлениях и в конце автомобиль подвергается силе торможения с замедлением 1g.
Из этих результатов измерений можно сделать следующие наблюдения:
- Существует несколько временных сегментов, где результаты измерений акселерометром и гироскопом являются постоянными или линейными.
- Временные сегменты могут быть идентифицированы, основываясь на самих данных акселерометра, а также на данных гироскопа, и барометр может использоваться для идентификации отдельных временных сегментов.
- Результаты измерений магнитометра не регистрируются, но могут также использоваться для идентификации отдельных временных сегментов.
- Во временных сегментах, где результаты измерения IMU не являются ни постоянными, ни линейными, для представления результатов измерений IMU во временном сегменте может быть уместна статистика результатов измерений IMU. Например, статистика значений показаний акселерометра (или статистика по осям) может использоваться для характеризации вибрации, которой подверглось устройство.
Ориентация устройства, такого как целевое устройство 10, может оцениваться с помощью акселерометра и магнитометра. Акселерометр дает данные ускорения устройства в координатах X, Y и Z (относительно системы координат устройства). Поскольку акселерометр измеряет силу тяжести в качестве ускорения, оценка z-составляющей (в ограниченных землей координатах) может быть извлечена, используя акселерометр. Ориентация по x/y с ограничением землей может быть оценена с помощью магнитометра, где результаты измерений магнитометра основаны на магнитном поле Земли.
Одним из параметров, которые могут быть уточнены в отчетности о результатах измерений IMU, является ориентация целевого устройства 10 в начальной точке измерений. Начальная точка измерений может быть опорным положением, относительно которого выполняются относительные измерения. Что касается последующих измерений, которые могут также упоминаться как следующие измерения, обеспечение относительных движений для сети может быть возможным, чтобы продолжать оценивать ориентацию целевого устройства 10 на более поздних этапах, хотя об этом следует сообщать в отчетности о начальных измерениях.
Поэтому в одном из вариантов осуществления целевое устройство 10 преобразует результаты измерений датчиков в систему координат, ограниченную землей.
В другом варианте осуществления целевое устройство 10 объединяет результаты измерений датчиков в предполагаемое перемещение относительно опорного положения, где как опорное положение, так и перемещение могут быть выражены в системе координат, ограниченной землей.
В другом варианте осуществления целевое устройство 10 выражает результаты измерений в системе координат, ограниченной UE, но содержит информацию о том, как связаны система координат, ограниченная целевым устройством, и система координат, ограниченная землей. Например, связь может быть выражена посредством трехмерной матрицы вращения.
Как очевидно из примеров, представленных на фиг. 5-7, может оказаться непрактичным принимать все результаты измерений IMU, проделанных на стороне целевого устройства. С другой стороны, наличие фиксированного временного периода отчетности также может являться неэффективным подходом, поскольку фиксированная отчетность может быть короткой или длинной в разное время из-за поведения целевого устройства. Может быть полезным использовать определенную временную сегментацию для отчетности IMU, основываясь на некоторых внезапных изменениях в поведении целевого устройства. Таким образом, целевое устройство 10 может применять конкретную временную сегментацию для отчетности IMU, основанную на изменениях в поведении целевого устройства.
В одном из вариантов осуществления эти разделения на временные сегменты могут идентифицироваться целевым устройством 10 посредством пороговой обработки результатов измерений для каждого датчика или конкретного датчика.
В другом варианте осуществления эти разделения на временные сегменты могут определяться целевым устройством путем взятия производной графиков измерений для каждого датчика. В случае, когда абсолютная производная в любой один момент времени находится выше порога, то тогда эта точка может определять место разделения между временными сегментами.
В целом, идентифицированные моменты временной сегментации могут возникать, когда один или более датчиков выполняют критерии временной сегментации. Существуют случаи, когда критерии временной сегментации могут быть основаны на чувствительности датчиков устройства, где высокочувствительное (более точное) устройство требует меньшего изменения (например, более низкая абсолютная производная) по сравнению с менее чувствительным устройством.
В другом варианте осуществления целевое устройство 10 может быть конфигурировано с помощью критериев временной сегментации. Критерии могут содержать определенный порог датчика, как описано выше, или некоторые заданные более сложные критерии. Временные сегменты могут также обладать максимальной/минимальной продолжительностью временных сегментов.
Обычно, чтобы наблюдать изменения на одном или нескольких датчиках, но не на всех из них, например, как показано на фиг. 7, для данных датчика барометра может наблюдаться постоянное поведение, в то время для других двух датчиков существуют большие изменения данных. В одном из вариантов осуществления целевое устройство 10 может быть выполнено с возможностью отказа от сообщения данных для датчиков, если данные остаются такими же, как в предыдущем сегменте. Как вариант, целевое устройство 10 может указывать, что отказывается от отчетности, поскольку данные остаются такими же, как в предыдущем сегменте.
В случае измерений шумов посредством IMU, например, когда критерий инициирования выполняется постоянно в течение короткого срока (как показано на фиг. 6, после примерно 10 секунд), временные сегменты могут быть очень короткими, что указывает, что никакие надежные данные IMU не могут быть собраны за такой временной период. Целевое устройство 10 может при этом сообщить об объединенном временном сегменте, содержащем длительность по времени, когда IMU имеет слишком большие шумы, и для этого временного сегмента указывают, что никакие надежные данные IMU не могут быть собраны. В одном из вариантов осуществления целевое устройство 10 может также сообщать статистические свойства данных IMU в этом временном сегменте. Это может содержать, например, распределение значений результатов измерений датчиков, такое, как, например, распределение величин рыскания гироскопа в упомянутом временном сегменте. Другие статистические свойства данных IMU содержат:
- максимальное значение временного сегмента,
- количество времени или доля временного сегмента, в течение которого данные датчика превышали порог,
- информация в частотной области о временном сегменте, такая как информация, полученная путем частотно-временного преобразования в частотную область, например, посредством преобразования Фурье. Энергия в частотном спектре может указывать вибрацию, которой целевое устройство 10 подверглось во время временного сегмента.
Данные IMU для каждого временного сегмента могут содержать усредненное значение рассматриваемых IMU. Или это может быть значение, отфильтрованное, например, применяя сначала фильтр низких частот, чтобы избавиться от высоких шумовых пиков, и затем применяя усреднение отфильтрованных значений.
В одном из вариантов осуществления целевое устройство 10 может сообщать новые данные IMU, основываясь на разности, которая может также упоминаться как значение, относительное от предыдущего сообщенного значения, или, в другом варианте осуществления, соответствующее значение данных датчиков IMU можно сообщаться в любой момент времени, в который переключается отчетность.
Поскольку сеть может не иметь полной кривой данных для каждого из этих измерений IMU, целевое устройство 10 может передавать в сеть коэффициент неопределенности измерений. Например, как можно видеть в конце кривых, показанных на фиг. 5-7, когда флюктуации данных очень высоки, то тогда в момент, когда сеть приняла данные результатов измерений, проверка их истинности уже проведена.
Сеть, такая как сетевой узел 20, может снабжать целевое устройство 10 порогом, при котором неопределенность считается настолько высокой, что лучше всего не иметь вообще никакого отчетности, пока целевое устройство 10 не достигнет более стабильного состояния, чтобы избежать бесполезной отчетности о результатах измерений.
Данные IMU могут сообщаться в системе координат, ограниченной землей. Или, в другом варианте осуществления, в системе координат целевого устройства 10, в которой, например, z-составляющая может быть составляющей с направлением от дисплея.
Результаты измерений датчиков, такие как, например, результаты измерений IMU, результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или результаты измерений барометра обеспечивают информацию об относительном положении, которая требует связи с абсолютным опорным положением, чтобы иметь возможность оценить абсолютное положение на сервере определения местоположения или на целевом устройстве 10. Сервер определения местоположения может присутствовать в сетевом узле 20.
В одном из вариантов осуществления сетевой узел 20 и/или сервер определения местоположения, присутствующий в сетевом узле 20, может передать абсолютное опорное положение на целевое устройство 10.
В другом варианте осуществления сетевой узел 20 и/или сервер определения местоположения может посылать информацию об абсолютном опорном положении для какого-то момента времени и целевое устройство 10 может определять положение относительно этого положения в этот момент времени. Момент времени может быть явным или неявным, таким как время передачи самого последнего отчета о позиционировании от целевого устройства 10.
В одном из вариантов осуществления целевое устройство может определять опорное положение. В одной из альтернатив, опорное положение может быть предполагаемым абсолютным положением в предыдущий момент времени. В другой альтернативе, опорное положение, определенное целевым устройством 10, может быть искусственным положением, используемым для кодирования относительного положения, устанавливая другое абсолютное положение, где разница между этими двумя положениями дает относительное положение.
Чтобы позволить целевому устройству, 10 создание отчетности об абсолютном положении относительно опорного абсолютного положения, документ 3GPP TS 36.355 может быть расширен с помощью поля, обозначенного Sensor-MeasurementInformation-r15. Сигнализация в системе ASN1 может, например, быть следующей:
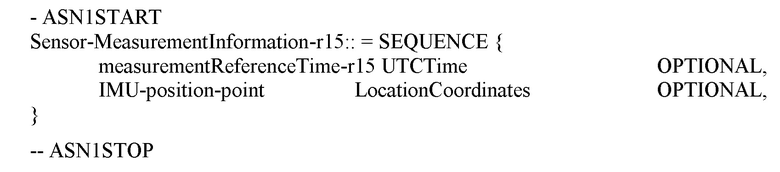
В представленной выше сигнализации целевое устройство 10 обеспечивает последовательность измерений, в которой первый элемент в последовательности может указывать время начала измерений датчиков, например, используя формат UTCTime, вместе с абсолютным опорным положением (обозначенным как IMU-position-point), другие элементы в последовательности указывают время и относительное смещение по отношению к IMU-position-point. Заметим, что LocationCoordinates является абсолютным положением, определяемым в документе 3GPP TS 36.355.
В одном из вариантов осуществления целевое устройство 10 может определять опорное положение для некоторого момента времени. Момент времени может быть задан неявно как момент времени самого последнего отчета о позиционировании от целевого устройства 10. Момент времени может также соответствовать конкретному отчету о позиционировании, но не самому последнему. Одним из примеров является самый последний отчет, который либо содержит оценку абсолютного положения, либо содержит достаточно информации для определения абсолютного положения. Примером последнего является отчет о позиционировании, содержащий результаты измерений разницы во времени принятого сигнала, которые сетевой узел 20 и/или сервер определения местоположения могут использовать для оценки абсолютного положения.
На фиг. 8 и 9 представлены этапы управления данными опорного положения, полученными в проекции от целевого устройства 10 и сетевого узла 20, соответственно.
На фиг. 8 представлены некоторые этапы способа, связанные с управлением опорным положением, которое может выполнять целевое устройство. Пунктирные линии на чертеже указывают, что эти подробности являются необязательными.
Этап 300: целевое устройство 10 может получить запрос о возможностях, связанный с отчетностью датчиков. Этот этап 200 соответствует этапу 100, обсуждавшемуся со ссылкой на фиг. 4a.
Этап 310: целевое устройство 10 может предоставить информацию о возможностях сетевому узлу 20. Информация о возможностях может содержать, например, информацию, касающуюся того, какие датчики имеет в наличии целевое устройство 10, как, например, какой тип датчиков содержится в целевом устройстве 10 и какие измерения целевое устройство 10 может выполнить с имеющимися датчиками.
Этап 320: целевое устройство 10 получает от сетевого узла 20 конфигурацию отчетности датчиков. Конфигурация отчетности датчиков может быть выбрана для определения местоположения, которое может также упоминаться как абсолютное положение целевого устройства 10.
Конфигурация отчетности датчиков может содержать информацию об опорном положении, такую как, например, опорное положение целевого устройства. Опорное положение может использоваться в качестве начального положения, относительно которого должно измеряться относительное смещение целевого устройства.
Конфигурация отчетности датчиков может, например, содержать тип датчиков, которые должны использоваться для выполнения измерений, или тип измерений, которые должны быть выполнены.
Этап 325: целевое устройство 10 получает результаты измерений датчиков. Результаты измерений датчиков могут быть связаны с движением целевого устройства 10, таким как, например, смещение, изменение ориентации или изменение давления, связанные с целевым устройством 10. Целевое устройство 10 может определять относительное положение относительно опорного положения, например, объединяя множество результатов измерений датчиков для определения относительного положения. Результаты измерений датчиков могут содержать результаты измерений IMU, такие как, например, результаты измерений акселерометра, результаты измерений гироскопа, результаты измерений атмосферного давления.
Результаты измерений датчиков могут содержать опорное положение целевого устройства в начальной точке измерения, такой как начальное положение измерения. Начальное положение измерения может быть абсолютным положением целевого устройства 10 в начале измерения. Когда целевое устройство 10 начинает измерения датчиков, оно может определить свое собственное абсолютное положение. Последующие измерения датчиков могут измерять отклонение, то есть, относительное движение целевого устройства относительно начального положения измерения.
Результаты измерений датчиков могут дополнительно содержать ориентацию целевого устройства в опорном положении.
Этот этап 325 подобен этапу 130, обсуждавшемуся со ссылкой на фиг. 4a.
Этап 330: целевое устройство 10 определяет объем отчетности, основываясь на полученных результатах измерений датчиков в соответствии с полученной конфигурацией отчетности датчиков. Определение объема отчетности может содержать, например, определение, какие из полученных результатов измерений должны сообщаться сетевому узлу 20, основываясь на полученной конфигурации отчетности датчиков. Таким образом, целевое устройство 10 может адаптировать объем отчетности, который, также как результаты измерения, может быть связан с движениями целевого устройства 10. Целевое устройство 10 может сообщать более подробную информацию в сценариях с высокой мобильностью, таких как, например, когда целевое устройство интенсивно движется, и менее подробную информацию, когда целевое устройство не движется или движется менее сложным способом.
Этот этап 330 подобен этапу 130, обсуждавшемуся со ссылкой на фиг. 4a.
Этап 340: целевое устройство 10 сообщает результаты измерений датчиков и указывает информацию об опорном положении, соответствующие определенному объему отчетности. Отчетность о результатах измерений датчиков может содержать передачу сетевому узлу 20 отчета о результатах измерений, содержащего результаты измерений датчиков.
Информация об опорном положении может быть неявной, чтобы указывать опорное положение, полученное от сетевого узла, или может содержать момент времени, который может быть связан с опорным положением. Одним из примеров времени может быть момент времени, связанный с отчетом о позиционировании в прошлом. Другим примером может быть целевое устройство 10, которое указывает опорное положение и текущее положение как средство кодирования относительного положения.
Этот этап 340 соответствует этапу140, обсуждавшемуся со ссылкой на фиг. 4a.
На фиг. 9 представлены этапы способа, соответствующие представленным здесь вариантам осуществления, связанным с управлением опорным положением с точки зрения сетевого узла. Пунктирные линии на чертеже указывают, что эти подробности являются необязательными.
Этап 400: сетевой узел 20 может посылать целевому устройству 10 запрос о возможностях. Этот этап 400 соответствует этапу 200, обсуждавшемуся со ссылкой на фиг. 4b.
Этап 410: сетевой узел 20 может получать информацию о возможностях, связанную с отчетностью датчиков, сообщаемой от целевого устройства 10.
Этот этап 410 соответствует этапу 210, обсуждавшемуся со ссылкой на фиг. 4b.
Этап 420: сетевой узел 20 передает целевому устройству 10 конфигурацию отчетности датчиков. Конфигурация отчетности датчиков может содержать информацию об опорном положении. Информация об опорном положении может указывать опорное положение, которое должно использоваться при указании относительного положения целевого устройства 10. Опорное положение может быть явным или неявным. Примером последнего может быть указание использовать положение, связанное с определенным моментом времени. Например, это может быть момент времени самой последней отчетности о позиционировании, если не указано ничто иное. Следовательно, положение целевого устройства 10 в этот момент времени самой последней отчетности о позиционировании может быть указано в информации об опорном положении как опорное положение. Результаты измерений датчиков могут содержать результаты измерений IMU, такие как результаты измерений акселерометра, результаты измерений гироскопа и/или результаты измерений атмосферного давления. Сообщаемые результаты измерений датчиков могут содержать опорное положение целевого устройства 10.
Сообщаемые результаты измерений датчиков могут дополнительно содержать ориентацию целевого устройства 10 в опорном положении.
Этот этап 420 соответствует этапу 220, обсуждавшемуся со ссылкой на фиг. 4b.
Этап 430: сетевой узел 20 получает от целевого устройства 10 отчетность о результатах измерений датчиков, содержащую информацию об опорном положении.
Этот этап 430 соответствует этапу 230, обсуждавшемуся со ссылкой на фиг. 4b.
Этап 440: сетевой узел 20 определяет абсолютное положение целевого устройства 10, основываясь на полученных результатах измерений датчиков. Альтернативно, сетевой узел 20 получает оценку позиционирования от целевого устройства 10, основываясь на ранее сообщенном опорном положении и относительном положении, определенном целевым устройством 10.
Со ссылкой на фиг. 10 схематично представлена блок-схема вариантов осуществления целевого устройства 10, показанного на фиг. 2. Пунктирные линии на чертеже числе указывают, что эти подробности являются необязательными.
Целевое устройство 10 может содержать модуль 1001 обработки, который может использоваться как средство выполнения описанных здесь способов. Средства могут быть реализованы в форме одного или более аппаратных модулей и/или одного или более программных модулей.
Целевое устройство 10 может далее содержать память 1002. Память может содержать, то есть, иметь или хранить, команды, например, в форме компьютерной программы 1003, которая может содержать считываемые компьютером кодовые элементы.
В соответствии с представленными здесь некоторыми вариантами осуществлениям, целевое устройство 10 и/или модуль 1001 обработки может содержать схему 1004 обработки в виде, например, аппаратного модуля. Соответственно, модуль 1001 обработки может быть реализован в форме или "осуществлен посредством" схемы 1004 обработки. Команды могут исполняться схемой 1004 обработки, за счет чего целевое устройство 10 может действовать так, чтобы выполнять способы, представленные на фиг. 4a и/или на фиг. 8. В качестве другого примера, команды, когда они исполняются целевым устройством 10 и/или схемой 1004 обработки, могут заставить целевое устройство 10 выполнять способ в соответствии с фиг. 4a и/или фиг. 8.
С точки зрения вышеизложенного, в одном из примеров обеспечивается целевое устройство 10 для выполнения способа позиционирования целевого устройства. Как было упомянуто, целевое устройство 10 может быть выполнено с возможностью осуществления этапов способа, раскрытых на фиг. 4a и 8.
И опять, память 1002 может содержать команды, исполняемые упомянутой схемой 1004 обработки, за счет чего целевое устройство 10 действовать с возможностью:
- получения от сетевого узла 20 конфигурации отчетности датчиков,
- определения объема отчетности, основываясь на полученных результатах измерений датчиков в соответствии с полученной конфигурацией датчиков,
- передачи сетевому узлу 20 отчета о результатах измерений для измерений датчиков в соответствии с определенным объемом отчетности.
Память 1002 может содержать команды, исполняемые упомянутой схемой 1004 обработки, за счет чего целевое устройство 10 может действовать с возможностью:
- получения от сетевого узла 20 запроса о возможностях, связанного с отчетностью датчиков,
- предоставления сетевому узлу 20 информации о возможностях, связанной с отчетностью датчиков.
На фиг. 10 дополнительно показан носитель 1005 или носитель программы, который содержит компьютерную программу 1003, как непосредственно описано выше.
В некоторых варианты осуществлениях модуль 1001 обработки содержит модуль 1006 ввода-вывода, который в качестве примера может быть представлен приемным модулем и/или передающим модулем, как описано ниже, в случае применимости.
В дополнительных вариантах осуществления целевое устройство 10 и/или модуль 1001 обработки может содержать один или более приемных модулей 1010, модуль 1020 получения, модуль 1030 и передающий модуль 1040 в качестве примера аппаратных модулей. В других примерах один или более из упомянутых выше аппаратных модулей могут быть реализованы как один или более программный модуль.
Соответственно, целевое устройство 10 может быть выполнено с возможностью получения от сетевого узла 20 конфигурации отчетности датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения и/или приемный модуль 1010 могут быть выполнены с возможностью получения конфигурации отчетности датчиков.
Целевое устройство 10 дополнительно выполнено с возможностью получения результатов измерений датчиков перед определением объема отчетности.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения могут быть выполнены с возможностью получения результатов измерений датчиков до определения объема отчетности.
Дополнительно, целевое устройство 10 может быть выполнено с возможностью определения объема отчетности на основе полученных результатов измерений датчиков в соответствии с полученной конфигурацией датчиков.
Поэтому, в соответствии с различными вариантами осуществления, описанными выше, целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1030 определения 1030 могут быть выполнены с возможностью определения объема отчетности на основе полученных результатов измерений датчиков в соответствии с полученной конфигурацией датчиков.
Целевое устройство 10 может дополнительно быть выполнено с возможностью передачи сетевому узлу 20 отчета о результатах измерений для результатов измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
Поэтому, в соответствии с описанными здесь различными вариантами осуществления целевое устройство 10 и/или модуль 1001 обработки и/или передающий модуль 1040 могут быть выполнены с возможностью передачи сетевому узлу 20 отчета о результатах измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
Целевое устройство 10 может дополнительно быть выполнено с возможностью получения от сетевого узла 20 запроса о возможностях, связанного с отчетностью датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения могут быть выполнены с возможностью получения запроса о возможностях, связанного с отчетностью датчиков.
Целевое устройство 10 может дополнительно быть выполнено с возможностью предоставления сетевому узлу 20 информации о возможностях, связанной с отчетностью датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или передающий модуль 1040 могут быть выполнены с возможностью предоставления сетевому узлу 20, например, посредством конфигурации для передачи информации о возможностях, связанной с отчетностью датчиков.
Целевое устройство 10 дополнительно может быть выполнено с возможностью получения результатов измерений IMU.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения могут быть выполнены с возможностью получения результатов измерений IMU. В этом случае блок 1020 получения может, например, быть инерционным измерительным блоком.
Целевое устройство 10 дополнительно может быть выполнено с возможностью получения от сетевого узла 20 опорного положения целевого устройства 10, содержащегося в конфигурации отчетности датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 и/или модуль 1020 получения и/или приемный модуль 1010 могут быть выполнены с возможностью получения опорного положения целевого устройства (10), содержащегося в конфигурации отчетности датчиков.
Целевое устройство 10 дополнительно может быть выполнено с возможностью передачи сетевому узлу 20 отчет о результатах измерений для измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений дополнительно содержит опорное положение целевого устройства (10).
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или передающий модуль 1040 могут быть выполнены с возможностью передачи сетевому узлу 20 отчета о результатах измерений для результатов измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений дополнительно содержит опорное положение целевого устройства 10.
Целевое устройство 10 дополнительно выполнено с возможностью получения ориентации целевого устройства 10 в опорном положении.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения 1020 могут быть выполнены с возможностью получения ориентации целевого устройства 10 в опорном положении.
Целевое устройство 10 дополнительно выполнено с возможностью получения результатов измерений магнитометра, результатов измерений светочувствительных датчиков и/или сопутствующих результатов измерений.
Поэтому в соответствии с описанными выше различными вариантами осуществления целевое устройство 10 и/или модуль 1001 обработки и/или модуль 1020 получения могут быть выполнены с возможностью получения результатов измерений магнитометра, результатов измерений светочувствительных датчиков и/или сопутствующих результатов измерений.
На фиг. 11 схематично представлена блок-схема вариантов осуществления сетевого узла 20, показанного на фиг. 2. Пунктирные линии на чертеже указывают, что эти подробности являются необязательными.
Сетевой узел 20 может содержать модуль 2001 обработки, такой как средство для выполнения описанных здесь способов. Средства могут быть реализованы воплощены в форме одного или более аппаратных модулей и/или одного или более программных модулей.
Сетевой узел 20 может дополнительно содержать память 2002. Память может содержать, например, содержать или хранить, команды, например, в форме компьютерной программы 2003, которая может содержать считываемые компьютером кодовые элементы.
В соответствии с некоторыми содержащимися здесь вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки содержат схему 2004 обработки, например, аппаратный модуль. Соответственно, модуль 2001 обработки может быть реализован или "осуществлен" в форме схемы 2004 обработки. Инструкции могут исполняться схемой 2004 обработки, за счет чего сетевой узел 20 может действовать для выполнения способов, показанных на фиг. 4b и/или фиг. 9. В качестве другого примера, команды, когда они выполняются сетевым узлом 20 и/или схемой 2004 обработки, могут заставлять сетевой узел 20 выполнять способ в соответствии с фиг. 4b и/или фиг. 9.
С точки зрения вышесказанного, в одном из примеров обеспечивается сетевой узел 20 для выполнения способа позиционирования целевого устройства 10. Как было упомянуто, сетевой узел 20 может быть выполнен с возможностью реализации этапов способа, раскрытого на фиг. 4b и 9.
И опять, память 2002 может содержать команды, исполняемые упомянутой схемой 2004 обработки, за счет чего сетевой узел 20 может быть выполнен с возможностью:
- передачи целевому устройству 10 конфигурации отчетности датчиков,
- получения от целевого устройства 10 результатов измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством, основываясь на посланной конфигурации отчетности датчиков.
Память 2002 может дополнительно содержать команды, исполняемые упомянутой схемой 2004 обработки, за счет чего сетевой узел 20 может дополнительно быть выполнен с возможностью:
- передачи целевому устройству 10 запроса о возможностях, связанного с отчетностью датчиков,
- получения от целевого устройства 10 информации о возможностях, связанной с отчетностью датчиков,
- определения абсолютного положения целевого устройства 10 на основе полученных результатов измерений датчиков.
На фиг. 11 дополнительно показан носитель 2005 или носитель программы, который содержит компьютерную программу 2003, как описано здесь выше.
В некоторых вариантах осуществлениях модуль 2001 обработки содержит модуль 2006 ввода-вывода, который может быть представлен, например, приемным модулем и/или передающим модулем, как описано ниже, в зависимости от применения.
В дополнительных вариантах осуществления сетевой узел 20 и/или модуль 2001 обработки могут содержать один или более приемных модулей 2010, модуль 2020 получения, модуль 2030 определения и передающий модуль 2040, показанные в качестве примера как аппаратные модули. В других примерах один или более из вышеупомянутых примерных аппаратных модулей могут быть реализованы как один или несколько программных модулей.
Соответственно, сетевой узел 20 может быть выполнен с возможностью передачи целевому устройству 10 конфигурация отчетности датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, сетевой узел 20 и/или модуль 2001 обработки и/или передающий модуль 2020 могут быть выполнены с возможностью передачи целевому устройству 10 конфигурации отчетности датчиков.
Дополнительно, сетевой узел 20 может быть выполнен с возможностью получения от целевого устройства 10 отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством 10, основываясь на посланной конфигурации отчетности датчиков, где отчетность о результатах измерений содержит смещение целевого устройства 10 относительно опорного положения.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, сетевой узел 20 и/или модуль 2001 обработки и/или модуль 2020 получения могут быть выполнены с возможностью получения от целевого устройства 10 отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством 10 на основе посланной конфигурации отчетности датчиков, где отчет о результатах измерений содержит смещение целевого устройства 10 относительно опорного положения.
Сетевой узел 20 может дополнительно быть выполнен с возможностью передачи целевому устройству 10 запроса о возможностях, связанного с отчетностью датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки и/или передающий модуль 2040 могут быть выполнены с возможностью передачи целевому устройству 10 запроса о возможностях, связанного с созданием отчетности датчиков.
Сетевой узел 20 может дополнительно быть выполнен с возможностью получения от целевого устройства 10 информации о возможностях, связанной с отчетностью датчиков.
Поэтому, в соответствии с описанными выше различными вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки и/или модуль 2020 получения могут быть выполнены с возможностью получения от целевого устройства 10 информации о возможностях, связанной с отчетностью датчиков.
Сетевой узел 20 может дополнительно быть выполнен с возможностью получения от целевого устройства 10 отчета о результатах измерений, в котором отчет о результатах измерений содержит результаты измерений IMU.
Поэтому в соответствии с описанными выше различными вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки и/или модуль 2020 получения могут быть выполнены с возможностью получения отчета о результатах измерений, где отчет о результатах измерений содержит результаты измерений IMU.
Сетевой узел 20 может дополнительно быть выполнен с возможностью получения от целевого устройства 10 отчета о результатах измерений, где отчет о результатах измерений содержит опорное положение целевого устройства 10.
Поэтому, в соответствии с описанными выше различными вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки и/или модуль 20202 получения могут быть выполнены с возможностью получения отчета о результатах измерений, где отчет о результатах измерений содержит опорное положение целевого устройства 10.
Сетевой узел 20 может дополнительно быть выполнен с возможностью получения от целевого устройства 10 отчета о результатах измерений, где отчет о результатах измерений содержит ориентацию целевого устройства 10 в опорном положении.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, сетевой узел 20 и/или модуль 2001 обработки и/или модуль 2020 получения могут быть выполнены с возможностью получения отчета о результатах измерений, где отчет о результатах измерений содержит ориентацию целевого устройства 10 в опорном положении.
Сетевой узел 20 может дополнительно быть выполнен с возможностью получения, от целевого устройства 10 отчета о результатах измерений, где отчет о результатах измерений содержит результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
Поэтому, в соответствии с описанными выше различными вариантами осуществления, сетевой узел 20 и/или модуль 2001 обработки и/или модуль 20202 получения могут быть выполнены с возможностью получения отчета о результатах измерений, где отчет о результатах измерений содержит результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
Сетевой узел 20 может дополнительно быть выполнен с возможностью определения абсолютного положения целевого устройства 10 на основе полученных результатов измерений датчиков.
Поэтому в соответствии с описанными выше различными вариантами осуществления сетевой узел 20 и/или модуль 2001 обработки и/или модуль 1030 определения могут быть выполнены с возможностью определения абсолютного положения целевого устройства 10 на основе полученных результатов измерений датчиков.
Способы, соответствующие описанным здесь вариантам осуществления для целевого устройства и сетевого узла, могут быть соответственно реализованы посредством, например, компьютерной программы или компьютерного программного продукта, содержащего команды, то есть, кодовых фрагментов программного обеспечения, которые, когда выполняются по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять описанные здесь действия, как выполняемые целевым устройством 10 или сетевым узлом 20. Компьютерная программа может храниться на считываемом компьютером носителе, например, на диске и т. п. Считываемый компьютером носитель, на котором хранится компьютерная программа, может содержать команды, которые, когда выполняются по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять описанные здесь действия, как выполняемые целевым устройством или сетевым узлом. В некоторых вариантах осуществления считываемый компьютером носитель может быть непереносным считываемым компьютером носителем.
Специалисты в данной области техники должны понимать, что модуль 1006, 2006 ввода-вывода, модуль 1001, 2001 обработки, приемный модуль 1010, 2010, модуль 1020, 2020 получения, модуль 1030, 2030 определения, передающий модуль 1040, 2040, описанные выше, могут относиться к сочетанию аналоговых и цифровых схем и/или одного или нескольких процессоров, конфигурированных с помощью программного обеспечения и/или встроенного микропрограммного обеспечения, например, хранящегося в памяти 1002, 2002, которые, когда выполняются одним или более процессорами, такими как блок обработки, как описано выше, выполняют действия в соответствии с любым из упомянутых выше этапов, как они выполняются целевым устройством 10 или сетевым узлом 20. Один или более из этих процессоров, а также другие цифровые аппаратные средства, могут содержаться в единой специализированной прикладной интегральной схеме (Application-Specific Integrated Circuitry, ASIC) или несколько процессоров и различные цифровые аппаратные средства могут быть распределены по нескольким отдельным компонентам, индивидуально упакованным или собранный в чип типа system-on-a-chip (SOC).
Сетевой узел 20, описанный здесь в вариантах осуществления, может также быть реализован посредством ресурсов в среде, подобной облаку, обычно называемой "облаком" (cloud). Хотя этапы способа, выполняемые здесь сетевым узлом 20, обсуждаются в контексте узла радиодоступа, способ может также быть выполнен узлом базовой сети или распределенным узлом, содержащимся в первом облаке, таким как, например, сервер и/или центр обработки данных. Этапы способа могут, например, быть выполнены посредством логической функции, которая может быть централизованным сервисом, размещенным на узле базовой сети или на распределенном узле.
При использовании слова "содержит" или "содержащий", оно должно интерпретироваться как не создающее ограничений, то есть, в значении "состоит, по меньшей мере, из".
Дополнительные примеры и варианты осуществления могут быть определены в последующих абзацах.
Описанные здесь варианты осуществления могут дополнительно относиться к нижеследующему.
1. Целевое устройство (10) для выполнения способа определения местоположения целевого устройства (10), выполненное с возможностью
- получения от сетевого узла (20) конфигурации отчетности датчиков
- получения результатов измерений датчиков,
- определения объема отчетности на основе полученных результатов измерений датчиков в соответствии с полученной конфигурацией отчетности датчиков
- передачи сетевому узлу (20) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
2. Целевое устройство (10) по п. 1, в котором целевое устройство (10) дополнительно выполнено с возможностью
- получения от сетевого узла (20) запроса о возможностях, связанного с отчетностью датчиков
- предоставление сетевому узлу (20) информации о возможностях, связанной с отчетностью датчиков.
3. Целевое устройство (10) по п. 1 или 2, где целевое устройство (10) дополнительно выполнено с возможностью получения результатов измерений инерционного измерительного блока IMU.
4. Целевое устройство (10) по любому из предшествующих пунктов, в котором целевое устройство (10) дополнительно выполнено с возможностью приема от сетевого узла (20) конфигурации отчетности датчиков, содержащей опорное положение целевого устройства (10).
5. Целевое устройство (10) в соответствии с любому из предыдущих абзацев, где целевое устройство (10) является дальнейшим оператором для передачи сетевому узлу (20) отчета о результатах измерений, содержащего опорное положение целевого устройства (10).
6. Целевое устройство (10) по любому из предшествующих пунктов, в котором целевое устройство (10) дополнительно выполнено с возможностью получения результатов измерений, содержащих ориентацию целевого устройства (10) в опорном положении.
7. Целевое устройство (10) по любому из предшествующих пунктов, в котором целевое устройство (10) дополнительно выполнено с возможностью получения результатов измерений магнитометра, результатов измерений светочувствительных датчиков и/или сопутствующих результатов измерений.
8. Сетевой узел (20) для выполнения способа определения местоположения целевого устройства (10), содержащий процессор и память, причем упомянутая память содержит команды, исполняемые упомянутым процессором, где упомянутое целевое устройство (10) выполнено с возможностью
- передачи целевому устройству (10) конфигурации отчетности датчиков
- получения от целевого устройства (10) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством (10) на основе переданной конфигурации отчетности датчиков, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
9. Сетевой узел (20) по п. 8, в котором сетевой узел (20) дополнительно выполнен с возможностью:
- передачи целевому устройству (10) запроса о возможностях, связанного с отчетностью датчиков,
- получения от целевого устройства (10) информация о возможностях, связанной с отчетностью датчиков.
10. Сетевой узел (20) по п. 8 или 9, в котором сетевой узел (20) дополнительно выполнен с возможностью получения от целевого устройства (10) результатов измерений датчиков, содержащих результаты измерений инерционного измерительного блока IMU.
11. Сетевой узел (20) по любому из пп. 8-10, где сетевой узел (20) дополнительно выполнен с возможностью получения от целевого устройства (10) результатов измерений датчиков, содержащих опорное положение целевого устройства (10).
12. Сетевой узел (20) по любому из пп. 8-11, где сетевой узел (20) дополнительно выполнен с возможностью получения от целевого устройства (10) результатов измерений датчиков, содержащих ориентацию целевого устройства (10) в опорном положении.
13. Сетевой узел (20) по любому из пп. 8-12, где сетевой узел (20) дополнительно выполнен с возможностью получения от целевого устройства (10) результатов измерений датчиков, содержащих результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
14. Сетевой узел (20) по любому из пп. 8-13, где сетевой узел (20) дополнительно выполнен с возможностью определения абсолютного положения целевого устройства (10), основываясь на полученных результатах измерений датчиков.
Представленные здесь варианты осуществления в соответствии со вторым примером также относятся к следующему:
15. Целевое устройство (10) для выполнения способа определения местоположения целевого устройства (10), содержащее:
- модуль (1020) получения, выполненный с возможностью получения от сетевого узла (20) конфигурации отчетности датчиков,
- модуль (1020) получения, дополнительно выполненный с возможностью получения результатов измерений датчиков,
- модуль (1030) определения, выполненный с возможностью определения объема отчетности, основываясь на полученных результатах измерений датчиков, в соответствии с полученной конфигурацией отчетности датчиков,
- передающий модуль (1040), выполненный с возможностью передачи сетевому узлу (20) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с определенным объемом отчетности, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
16. Целевое устройство (10) по п. 15, где целевое устройство (10) дополнительно содержит
- модуль (1020) получения, выполненный с возможностью получения от сетевого узла (20) запроса о возможностях, связанного отчетностью датчиков
- передающий модуль (1040), выполненный с возможностью предоставления сетевому узлу (20) информации о возможностях, связанной с отчетностью датчиков.
17. Целевое устройство (10) по п. 15 или 16, содержащее модуль (1020) получения, выполненный с возможностью получения результатов измерений датчиков, содержащих результаты измерений инерционного измерительного блока IMU.
18. Целевое устройство (10) по любому из пп. 14-17, содержащее передающий модуль (1040), выполненный с возможностью приема от сетевого узла (20) конфигурации отчетности датчиков, содержащей опорное положение целевого устройства (10).
19. Целевое устройство (10) по любому из пп. 14-18, содержащее передающий модуль (1040), выполненный с возможностью передачи сетевому узлу (20) отчета о результатах измерений, содержащего опорное положение целевого устройства (10).
20. Целевое устройство (10) по любому из пп. 14-19, содержащее модуль (1020) получения, выполненный с возможностью получения результатов измерений датчиков, содержащих ориентацию целевого устройства (10) в начальном положении измерения.
21. Целевое устройство (10) по любому из пп. 14-20, содержащее передающий модуль (1040), выполненный с возможностью получения результатов измерений датчиков, содержащих результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
22. Сетевой узел (20) для выполнения способа определения позиционирования целевого устройства (10), содержащий:
- передающий модуль (2030), выполненный с возможностью передачи целевому устройству (10) конфигурации отчетности датчиков,
- модуль (2020) получения, выполненный с возможностью получения от целевого устройства (10) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством (10), основываясь на переданной конфигурации отчетности датчиков, где отчет о результатах измерений содержит смещение целевого устройства (10) относительно опорного положения.
23. Сетевой узел (20) по п. 22, дополнительно содержащий:
передающий модуль (2030), дополнительно выполненный с возможностью передачи целевому устройству (10) запроса о возможностях, связанного с отчетностью датчиков,
- модуль (2020) получения, дополнительно выполненный с возможностью получения от целевого устройства (10) информации о возможностях, связанной с отчетностью датчиков.
24. Сетевой узел (20) по п. 22 или 23, дополнительно содержащий модуль (2020) получения, дополнительно выполненный с возможностью получения результатов измерений датчиков, содержащих результаты измерений инерционного измерительного блока IMU.
25. Сетевой узел (20) по любому из пп. 22-24, дополнительно содержащий модуль (2020) получения, дополнительно выполненный с возможностью получения результатов измерений датчиков, содержащих опорное положение целевого устройства (10).
26. Сетевой узел (20) по любому из пп. 22-25, дополнительно содержащий модуль (2020) получения, дополнительно выполненный с возможностью получения результатов измерений датчиков, содержащих ориентацию целевого устройства (10) в опорном положении.
27. Сетевой узел (20) по любому из пп. 22-26, дополнительно содержащий модуль (2020) получения, дополнительно выполненный с возможностью получения результатов измерений датчиков, содержащих результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующих измерений.
28. Сетевой узел (20) по любому из пп. 22-27, дополнительно содержащий модуль (2020) определения, дополнительно выполненный с возможностью определения абсолютного положения целевого устройства (10), основываясь на полученных результатах измерений датчиков.
Задачи, содержащиеся в источнике [1], то есть, RP-170813, New WID: UE Positioning Accuracy Enhancements for LTE, заключаются в том, чтобы определить решения для улучшения позиционирования в системе LTE в отношении точности позиционирования, доступности, надежности и масштабируемости, как для обычных Normal UE, так и для BL UE. Одно из соглашений заключается в том, чтобы
- определить поддержку для позиционирования IMU:
- определить сигнализацию и процедуру для поддержки позиционирования IMU по протоколу LPP и гибридного позиционирования, содержащего оценки, связанные с IMU. [RAN2, RAN1]
Кроме того, во время совещания RAN2#98 было согласовано:
- поддерживать для IMU только гибридное позиционирование, как упомянуто в рамках WID.
Это действие дополнительно обсуждает измерения IMU и аспекты сопутствующей сигнализации.
Инерционный измерительный блок (IMU) может позволить серверу определения местоположения оценивать траекторию движения целевого устройства между, после или во время сеанса позиционирования OTDOA/E-CID и может уменьшать необходимость в проведении частых измерений OTDOA/E-CID. Использование данных IMU вместе с оценкой положения показано на фиг. 2.
Данные IMU могут также указывать среду целевого устройства, в которой высокоскоростное целевое устройство, более вероятно, будет располагаться на открытом воздухе. Чтобы объединить результаты радиоизмерений с данными IMU, данные, которые сообщаются от целевого устройства 10, снабженного блоком IMU, могут быть совмещены со стандартизированной системой координат, ограниченной землей. Поэтому, чтобы получить положение целевого устройства в мировых координатах, требуется ориентация целевого устройства. Обычный способ определения ориентации состоит в использовании гироскопа, магнитометра и акселерометра. После оценки ориентации акселерометр и ориентация могут использоваться для оценки ускорения, связанного с системой координат (акселерометр минус сила тяжести). При наличии относительного ускорения можно оценить относительное смещение устройства, например, посредством двойного интегрирования. Однако реализации целевого устройства могут рассматривать более точные способы оценки смещения. Некоторые из представленных выше этапов могут уже поддерживаться UE и, следовательно, с точки зрения гибридного позиционирования может быть предпочтительным принимать эти отчеты о результатах измерений IMU на сервере определения местоположения. Поэтому при сигнализации возможности целевого устройства могут рассматриваться с точки зрения измерений и отчетности обо всех этих параметрах. Возможности устройств могут быть разделены следующим образом:
- устройство, которое может оценивать относительное расстояние,
- устройство, которое может оценивать относительное ускорение в мировых координатах, ограниченных землей,
- устройство, которое может измерять необработанные данные IMU.
Может рассматриваться поддержка различных типов устройства и формат отчетности может отражать каждый тип устройства.
Некоторые целевые устройства могут иметь возможности оценивать относительное положение, например, используя расчет пешеходной мертвой зоны (Pedestrian Dead Reckoning, PDR), или посредством двойного интегрирования линейного ускорения. Однако, в рассматриваемом временном окне между отчетами о позиционировании ускорение может не быть постоянным или линейным. Поэтому может быть необходимым сегментировать временное окно на множество временных сегментов, каждый из которых имеет оценку результата измерения IMU, которая может быть описана с разумной степенью сложности. Здесь, со ссылкой на фиг. 5-7, пример измерения IMU описывается только для иллюстрации ситуации. В случае отчетности целевого устройства 10 по многочисленным относительным смещениям, траектория целевого устройства может позволить Е-SMLC лучше предсказать будущее положение целевого устройства, не требуя частых измерений RSTD в соответствии с фиг. 2, или когда никакие другие измерения позиционирования недоступны. Формат отчета об относительном смещении поэтому может поддерживать более одной единственной относительной меры по смещению, а также содержать сопутствующее измерение неопределенности относительного смещения.
Некоторые целевые устройства 10 могут иметь возможность оценивать ускорение в мировых координатах, ограниченных землей. Может понадобиться, чтобы частота отчетности об ускорении могла отражать характеристики движения целевого устройства. Более конкретно, чтобы более точно оценивать траекторию целевого устройства, целевое устройство 10 может сообщать о многочисленных временных сегментах, где каждый из сегментов представляет кусочно-линейное или постоянное ускорение между двумя моментами времени. Учитывая относительное постоянное или линейное ускорение между множеством моментов времени, на сервере определения местоположения может быть оценена траектория целевого устройства. Отчетность об относительном ускорении может понадобиться сообщать в стандартизированной системе координат, ограниченной землей, предпочтительно, в системе координат, используемой для описания скорости, определенной в [3], где определяются азимут и горизонтальная скорость. Предложено, чтобы отчетность об относительном ускорении соответствовала той же самой системе координат, а также предложено добавить в [3] описание ускорения. Отчетность может также содержать результат измерения неопределенности для каждого образца.
Поскольку данные IMU являются относительными результатами измерений, общим элементом для типов устройства должна быть метка времени, указывающая время проведения каждого измерения IMU.
Предложение 6 Ввести метку времени, указывающую время измерения IMU.
Когда целевое устройство 10 способно измерять только необработанные данные IMU, чтобы позволить сети, такой как сетевой узел 20, преобразовывать результаты измерений в мировые координаты, может оказаться необходимым сообщать данные результатов измерений магнитометра, гироскопа и акселерометра.
Отчетность, необходимая для поддержки отчетности о смещении и относительном ускорении, описывается в соответствующих CR [4] и [5].
Литература
[1] RP-170813, New WID: UE Positioning Accuracy Enhancements for LTE.
[2] 3GPP TS 36.355, LTE Positioning Protocol (LPP) (Release 14)
[3] 3GPP TS 23.032
[4] 36355_change_request
[5] 23032_change_request
Введение в LPP сообщений датчиков IMU согласно редакции 15. Информация датчиков согласно редакции 13 была информацией о барометрическом давлении, тогда как редакция 15 содержит отчетность по акселерометру, магнитометру и гироскопу. UE вместе с отчетностью о результатах измерений должно также сообщать свою принятую опорную точку отсчета IMU.
Изменение содержит:
• Поддержка отчетности об относительном смещении
• Поддержка отчетности об измерении ускорения
Такая поддержка может быть необходима для улучшения позиционирования IMU, поддерживаемого UE.
ProvideLocationInformation:
Тело сообщения ProvideLocationInformation в сообщении LPP используется целевым устройством для предоставления результатов измерений позиционирования или оценок положения серверу определения местоположения.
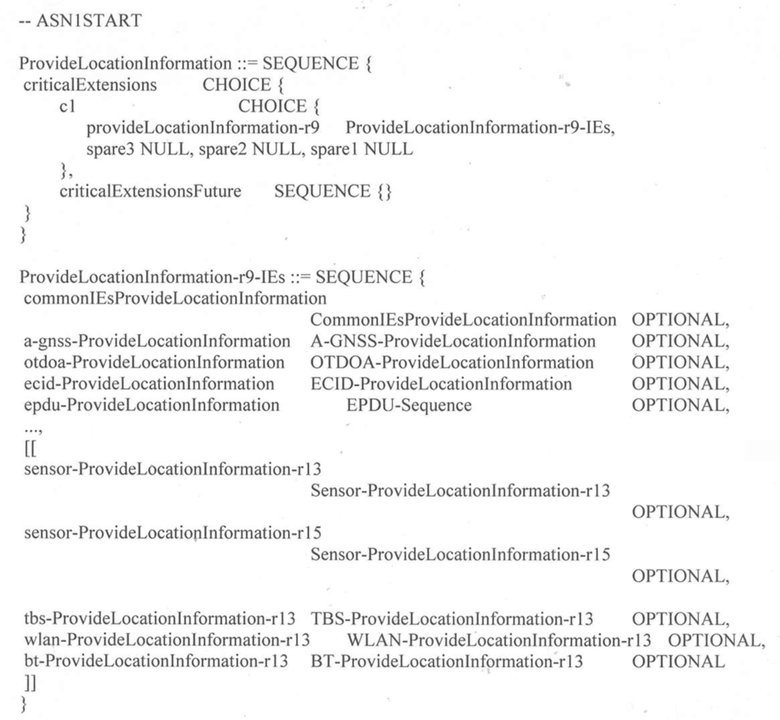
Информация о местоположении датчиков
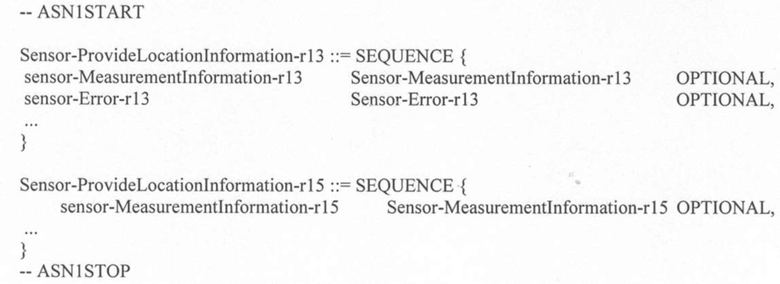
Sensor-ProvideLocationInformation:
Информационный элемент (IE) Sensor-ProvideLocationInformation используется целевым устройством для предоставления серверу определения местоположения информации о местоположении для способов, основанных на датчиках. Она может также использоваться для определения причины конкретной ошибки датчика.
Информационные элементы для определения местоположения датчиков
Sensor-MeasurementInformation
IE Sensor-MeasurementInformation может использоваться целевым устройством для предоставления серверу определения местоположения результатов измерений датчиков UE.
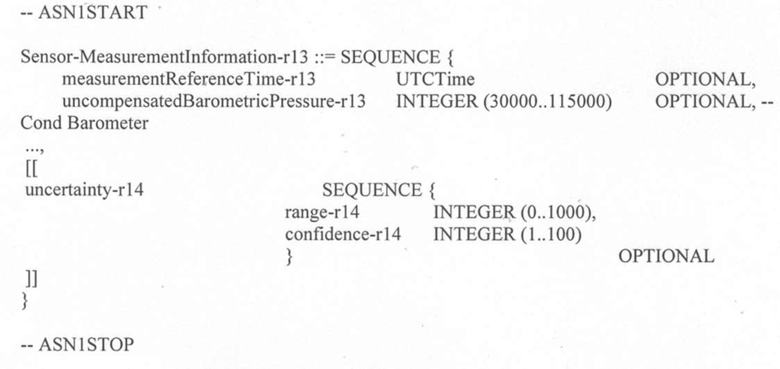
Это поле представляет время UTC, в которое проводятся измерения датчиков, и должно быть в форме YYMMDDhhmmss (год-день-месяц-часы-минуты-секунды).
Это поле обеспечивает нескомпенсированное барометрическое давление, измеряемое датчиком UE, единица измерения – Паскаль (Па).
Это поле представляет ожидаемые пределы результатов измерения давления в единицах измерения Па и доверительность как процент того, что истинное давление лежит в пределах (результат измерения – предел) - (результат измерения + предел).
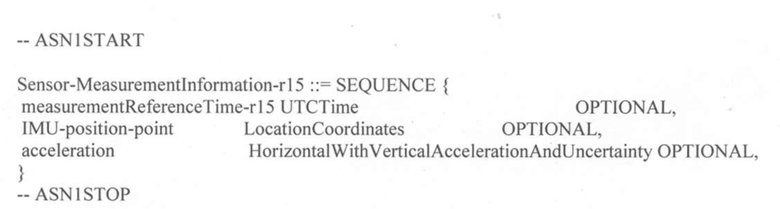
Это поле представляет время UTC, в которое проводятся измерения датчиков, и должно быть в форме YYMMDDhhmmss (год-день-месяц-часы-минуты-секунды).
Это поле представляет опорное положение, используя одну из географических форм, определенных в документе 3GPP TS 23.032 [15]. Кодирование значений различных полей внутри каждой географической формы – согласно правилам, приведенным в [15].
Это поле представляет оценку ускорения, используя одну из форм, ускорения, определенных в документе 3GPP TS 23.032 [15]. Кодирование значений различных полей внутри каждой формы ускорения – согласно правилам, приведенным в [15].
HorizontalVelocity
IE HorizontalVelocity используется для описания формы скорости, как определено в документе 3GPP TS 23.032 [15].
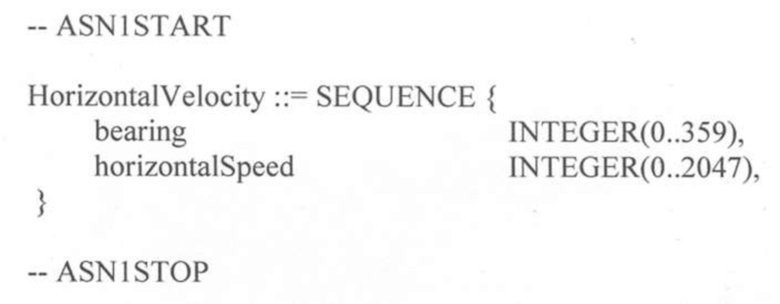
HorizontalWithVerticalVelocity
IE HorizontalWithVerticalVelocity используется для описания формы скорости, как определено в документе 3GPP TS 23.032 [15].
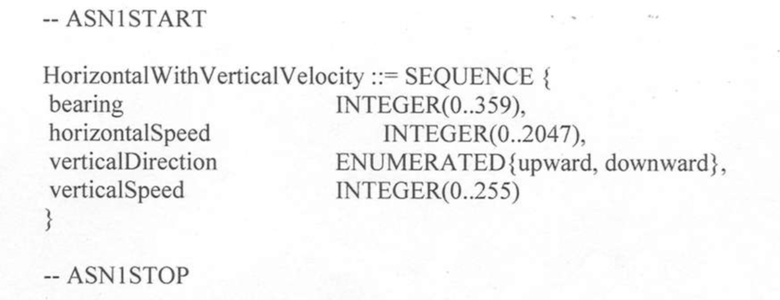
HorizontalVelocityWithUncertainty
IE HorizontalVelocityWithUncertainty используется для описания формы скорости, как определено в документе 3GPP TS 23.032 [15].
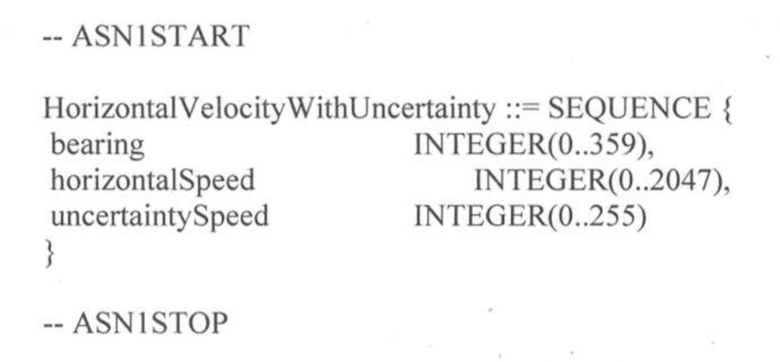
HorizontalWithVerticalVelocityAndUncertainty
IE HorizontalWithVerticalVelocityAndUncertainty используется для описания формы, скорости, как определено в документе 3GPP TS 23.032 [15].
HorizontalWithVerticalAccelerationAndUncertainty
IE HorizontalWithVerticalAccelerationAndUncertainty используется для описания формы ускорения, как определено в документе 3GPP TS 23.032 [15].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛЕВОГО УСТРОЙСТВА | 2019 |
|
RU2755141C1 |
| СПОСОБ, СИСТЕМА И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЗОНЫ ОТСУТСТВИЯ ПРИЕМА | 2009 |
|
RU2466510C2 |
| ПРЕДСТАВЛЕНИЕ ОТЧЕТА ПО ИЗМЕРЕНИЮ РАДИОСИГНАЛА | 2016 |
|
RU2680973C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ КОНФИГУРАЦИИ ОГРАНИЧЕНИЙ ИЗМЕРЕНИЙ | 2016 |
|
RU2679895C1 |
| СЕТЕВОЙ РАДИОУЗЕЛ, БЕСПРОВОДНОЕ УСТРОЙСТВО И ВЫПОЛНЯЕМЫЕ В НИХ СПОСОБЫ ИЗМЕРЕНИЯ ЛУЧА ДЛЯ ОЦЕНКИ КАЧЕСТВА ЯЧЕЙКИ | 2018 |
|
RU2753461C2 |
| ПЕРЕДАЧА ОТЧЕТА ОБ ИЗМЕРЕНИЯХ С РАСШИРЕННЫМ ПОКРЫТИЕМ | 2018 |
|
RU2715748C1 |
| УПРАВЛЕНИЕ ВОЗДЕЙСТВИЕМ ПЕРЕКЛЮЧЕНИЯ SRS НА ПЕРЕДАЧИ ПО КАНАЛУ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ | 2017 |
|
RU2724320C1 |
| ОБРАТНАЯ СВЯЗЬ В ВИДЕ ПОЛУПОСТОЯННОЙ ИНФОРМАЦИИ CSI ПО КАНАЛУ PUSCH | 2018 |
|
RU2729769C1 |
| НАПРАВЛЕНИЕ ОТЧЕТОВ УСТРОЙСТВОМ БЕСПРОВОДНОЙ СВЯЗИ | 2018 |
|
RU2768271C2 |
| НАПРАВЛЕНИЕ ОТЧЕТОВ УСТРОЙСТВОМ БЕСПРОВОДНОЙ СВЯЗИ | 2014 |
|
RU2670382C1 |

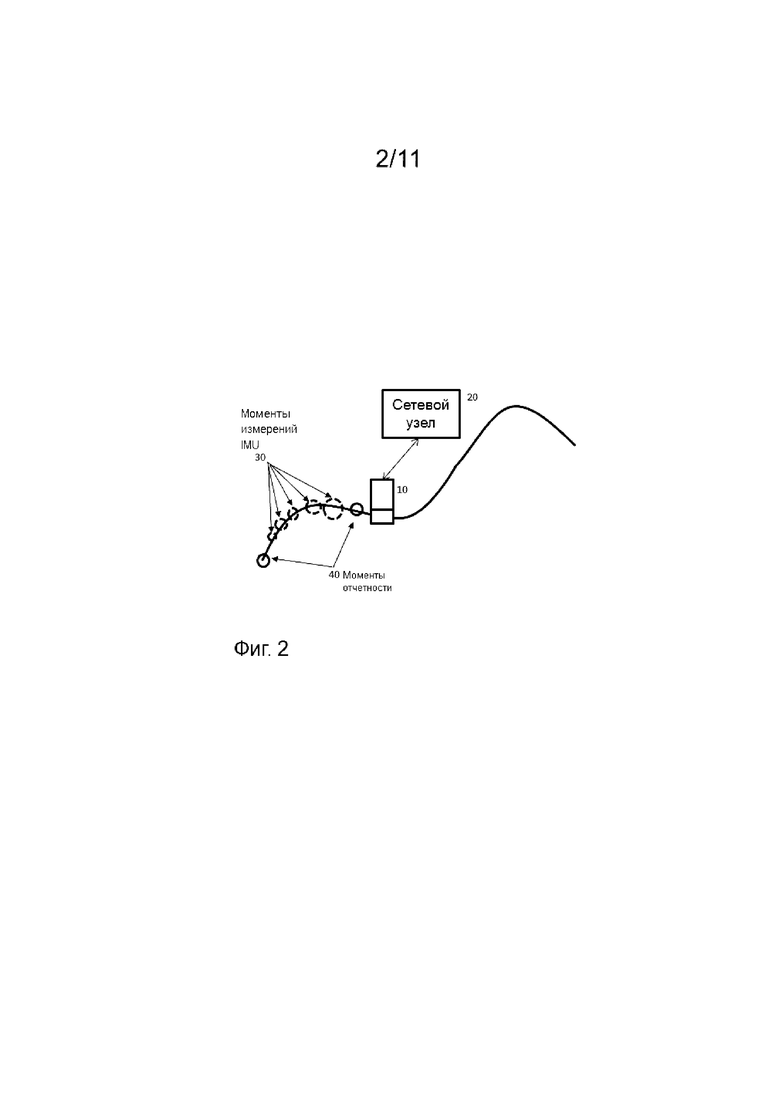
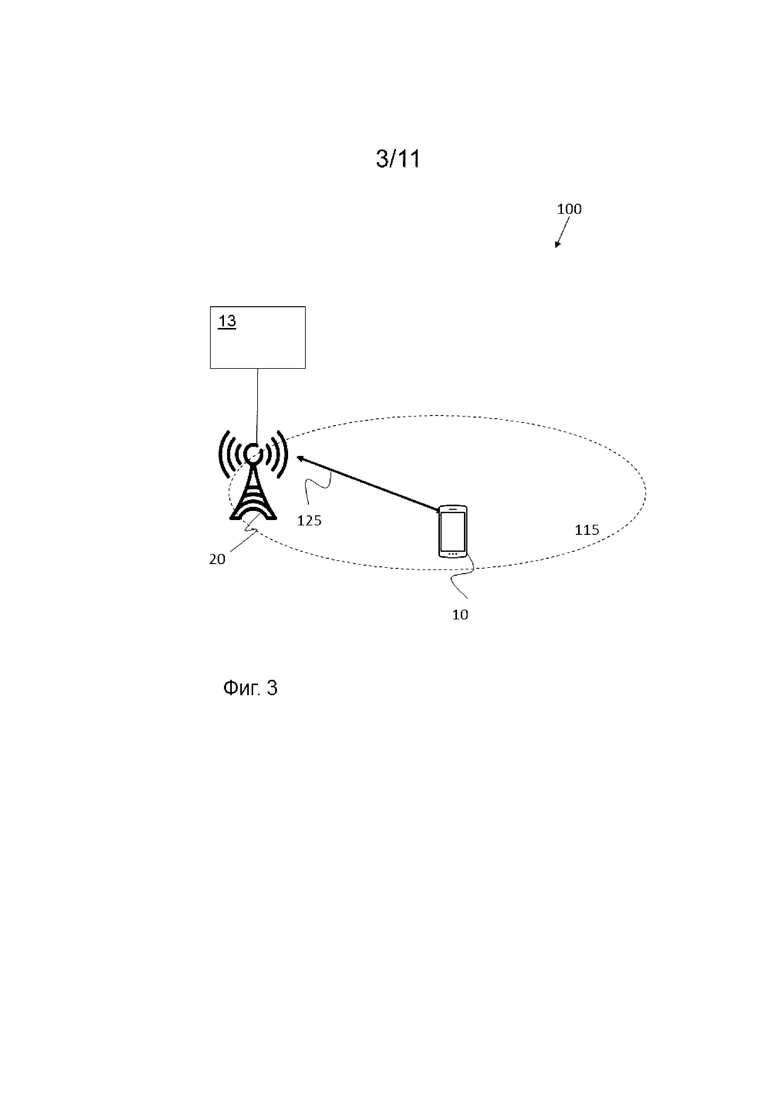
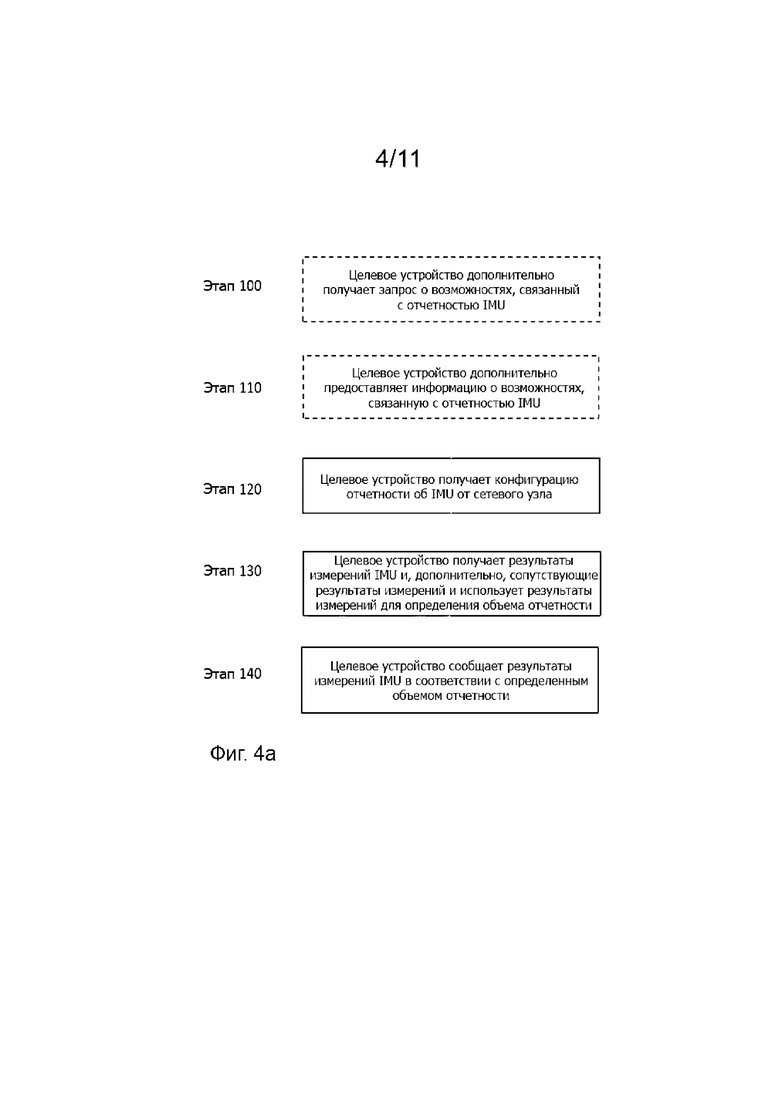
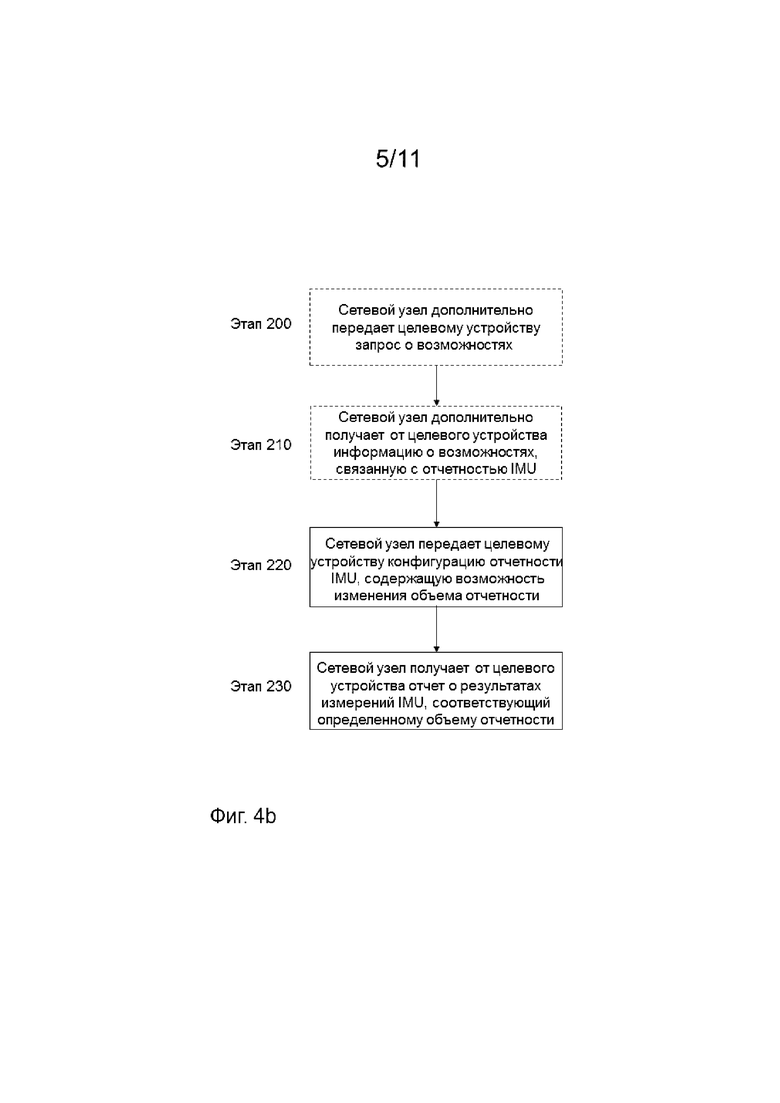
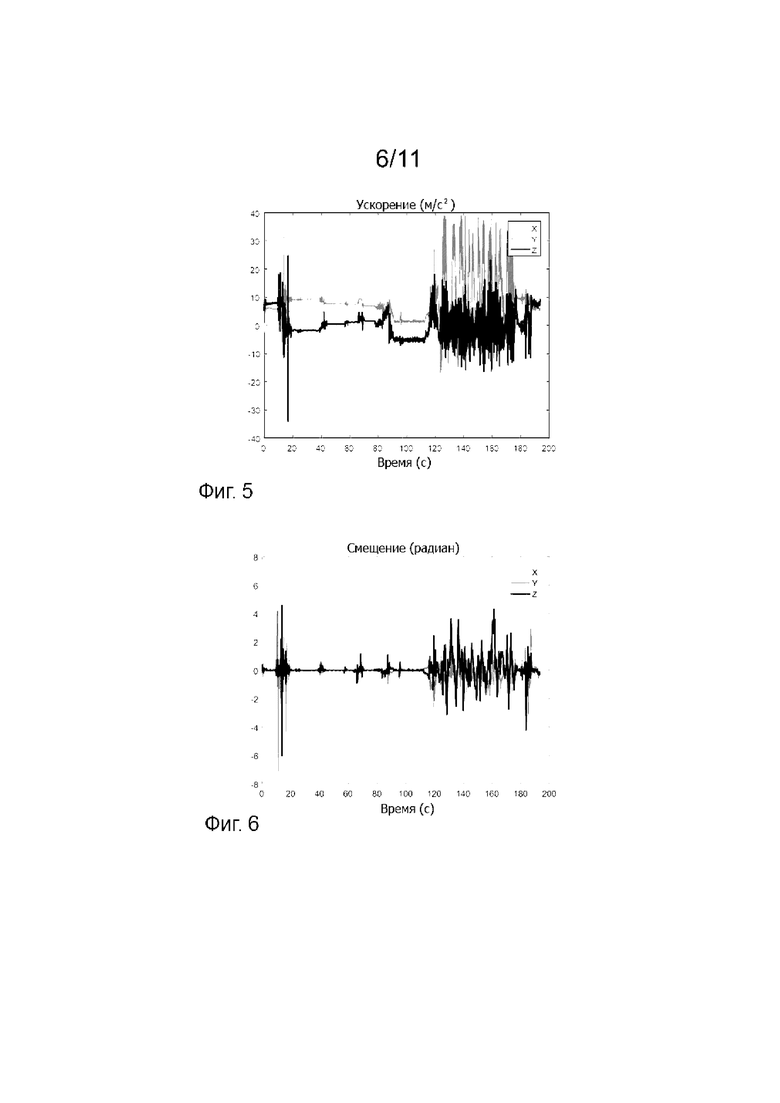
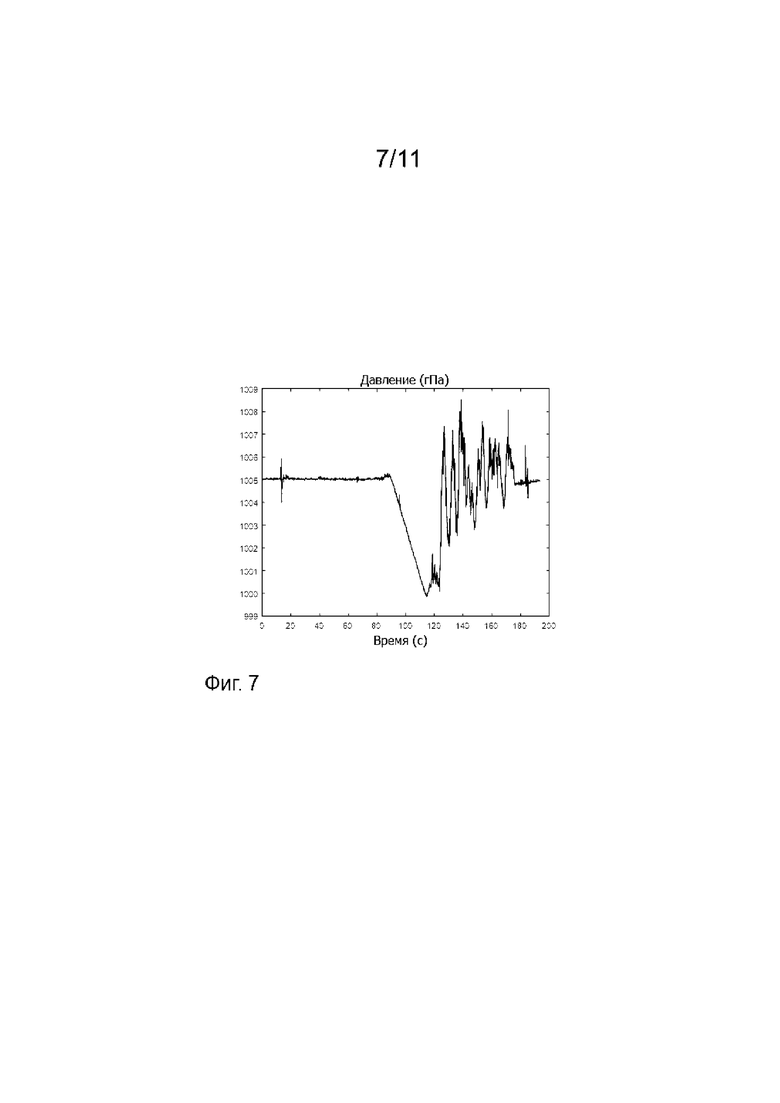
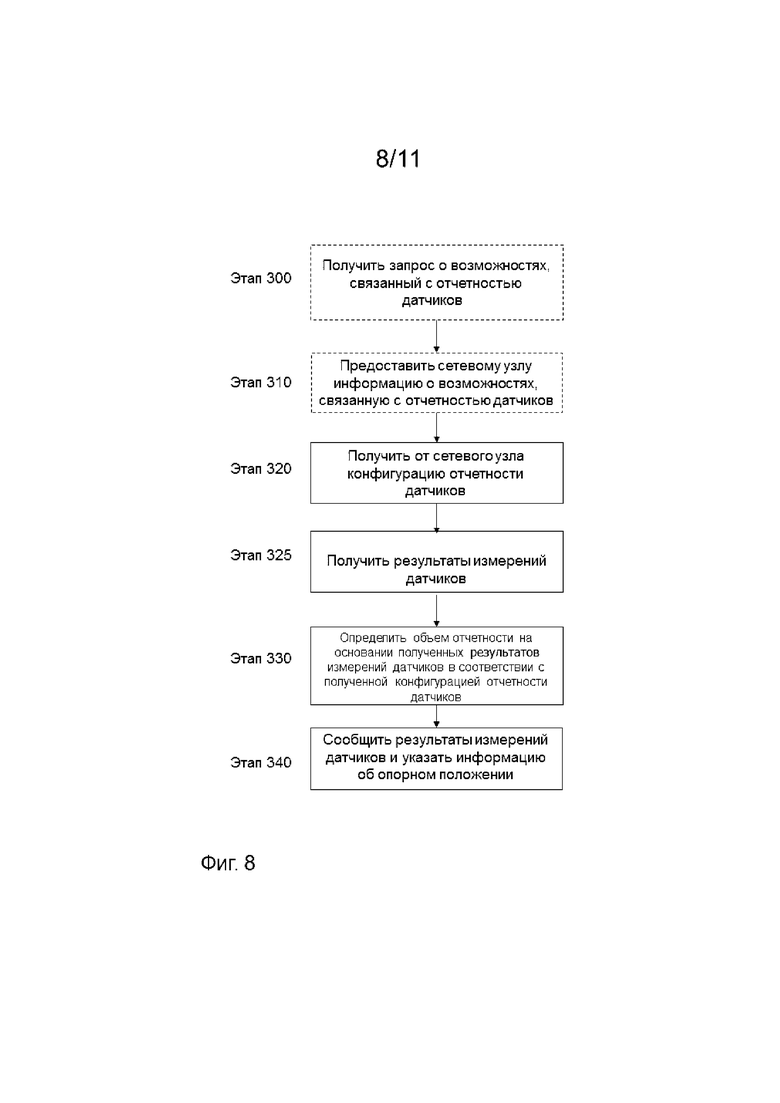
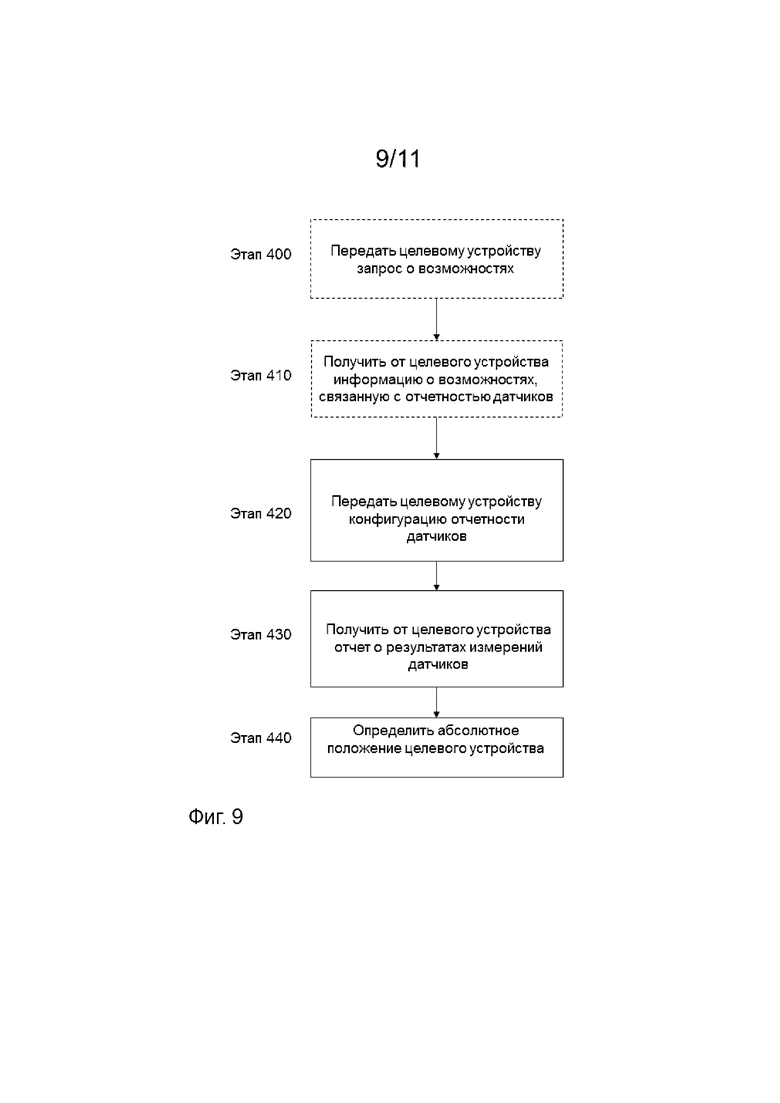
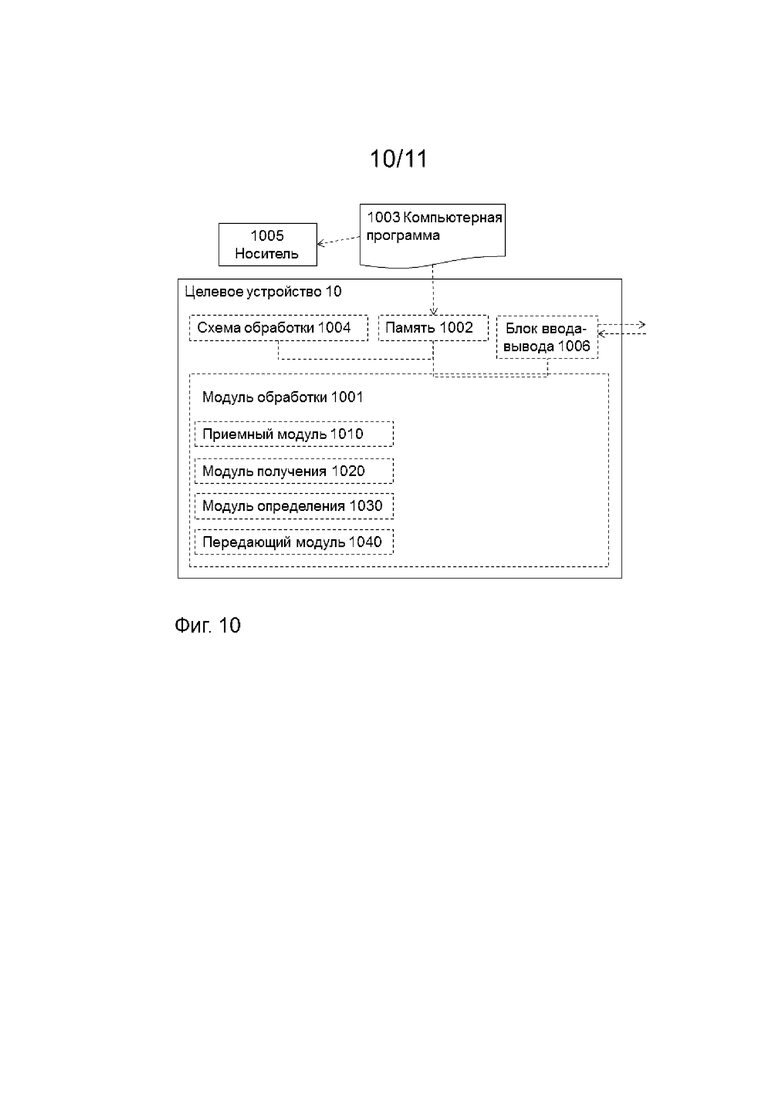
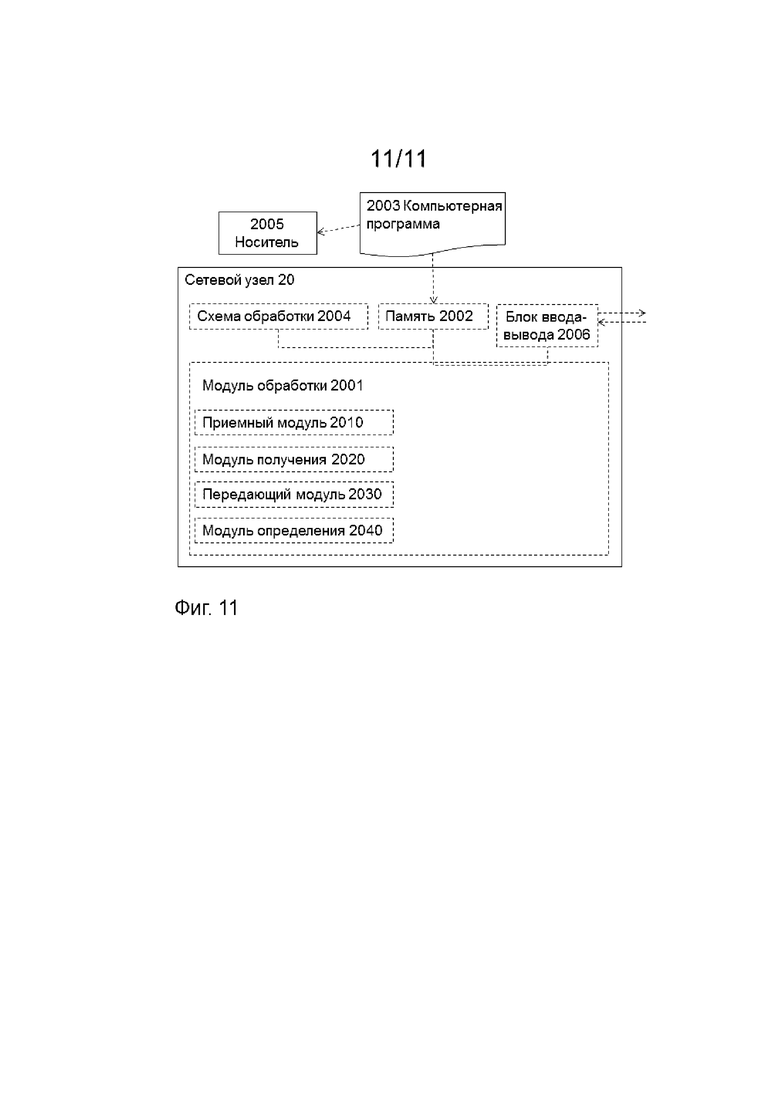
Изобретение относится к системам позиционирования целевых устройств в системах беспроводной связи. Технический результат заключается в улучшении характеристик сети беспроводной связи посредством улучшения позиционирования целевого устройства. Целевое устройство получает от сетевого узла конфигурацию отчетности датчиков. Целевое устройство получает результаты измерений датчиков, определяет объем отчетности на основе полученных результатов измерений датчиков, в соответствии с полученной конфигурацией отчетности датчиков, передает сетевому узлу отчет о результатах измерений, содержащий результаты измерений датчиков, в соответствии с определенным объемом отчетности, причем отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения. 5 н. и 24 з.п. ф-лы, 12 ил.
1. Способ, выполняемый целевым устройством (10), для управления позиционированием целевого устройства (10), причем способ содержит этапы, на которых:
получают (320) от сетевого узла (20) конфигурацию отчетности датчиков,
получают (325) результаты измерений датчиков,
определяют (330) объем отчетности на основе полученных результатов измерений датчиков в соответствии с полученной конфигурацией отчетности датчиков,
передают (340) сетевому узлу (20) отчет о результатах измерений, содержащий результаты измерений датчиков в соответствии с определенным объемом отчетности, причем отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
получают (300) от сетевого узла (20) запрос о возможностях, связанный с отчетностью датчиков,
предоставляют (310) сетевому узлу (20) информацию о возможностях, связанную с отчетностью датчиков.
3. Способ по п. 1 или 2, в котором результаты измерений датчиков содержат результаты измерений инерционного измерительного блока (IMU).
4. Способ по любому из пп. 1-3, в котором конфигурация отчетности датчиков содержит опорное положение целевого устройства.
5. Способ по любому из пп. 1-4, в котором отчет о результатах измерений содержит опорное положение целевого устройства.
6. Способ по любому из пп. 1-5, в котором результаты измерений датчиков содержат ориентацию целевого устройства в опорном положении.
7. Способ по любому из пп. 1-6, в котором результаты измерений датчиков содержат результаты измерений магнитометра, светочувствительных датчиков и/или сопутствующие результаты измерений.
8. Способ, выполняемый сетевым узлом (20), для управления позиционированием целевого устройства (10), причем способ содержит этапы, на которых:
передают (420) целевому устройству (10) конфигурацию отчетности датчиков,
получают (430) от целевого устройства (10) отчет о результатах измерений, содержащий результаты измерений датчиков, в соответствии с объемом отчетности, определенным целевым устройством (10) на основании переданной конфигурации отчетности датчиков, причем отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
9. Способ по п. 8, дополнительно содержащий этапы, на которых
передают (400) целевому устройству (10) запрос о возможностях, связанный с отчетностью датчиков,
получают (410) от целевого устройства (10) информацию о возможностях, связанную с отчетностью датчиков.
10. Способ по п. 8 или 9, в котором результаты измерений датчиков содержат результаты измерений инерционного измерительного блока (IMU).
11. Способ по любому из пп. 8-10, в котором результаты измерений датчиков содержат опорное положение целевого устройства (10).
12. Способ по любому из пп. 8-11, в котором результаты измерений датчиков содержат ориентацию целевого устройства (10) в опорном положении.
13. Способ по любому из пп. 8-12, в котором результаты измерений датчиков содержат результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
14. Способ по любому из пп. 8-13, дополнительно содержащий этап, на котором определяют абсолютное положение целевого устройства (10) на основе полученных результатов измерений датчиков.
15. Считываемый компьютером носитель, на котором хранится компьютерный программный продукт, содержащий команды, которые, когда исполняются по меньшей мере одним процессором, вызывают выполнение упомянутым по меньшей мере одним процессором способа по любому из пп. 1-14.
16. Целевое устройство (10) для выполнения способа определения местоположения целевого устройства (10), характеризующееся тем, что выполнено с возможностью:
получения от сетевого узла (20) конфигурации отчетности датчиков,
получения результатов измерений датчиков,
определения объема отчетности на основе полученных результатов измерений датчиков в соответствии с полученной конфигурацией отчетности датчиков,
передачи сетевому узлу (20) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с определенным объемом отчетности, причем отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
17. Целевое устройство (10) по п. 16, характеризующееся тем, что дополнительно выполнено с возможностью:
получения от сетевого узла (20) запроса о возможностях, связанного с отчетностью датчиков,
предоставление сетевому узлу (20) информации о возможностях, связанной с отчетностью датчиков.
18. Целевое устройство (10) по п. 16 или 17, в котором результаты измерений датчиков содержат результаты измерений инерционного измерительного блока (IMU).
19. Целевое устройство (10) по любому из пп. 16-18, в котором конфигурация отчетности датчиков, принятая от сетевого узла (20), содержит опорное положение целевого устройства (10).
20. Целевое устройство (10) по любому из пп. 16-19, в котором отчет о результатах измерений, переданный сетевому узлу (20), содержит опорное положение целевого устройства (10).
21. Целевое устройство (10) по любому из пп. 16-20, в котором результаты измерений датчиков, полученные целевым устройством (10), содержат ориентацию целевого устройства (10) в опорном положении.
22. Целевое устройство (10) по любому из пп. 16-21, в котором результаты измерений датчиков, полученные целевым устройством (10), содержат результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
23. Сетевой узел (20) для выполнения способа определения местоположения целевого устройства (10), характеризующийся тем, что выполнен с возможностью:
передачи целевому устройству (10) конфигурации отчетности датчиков,
получения от целевого устройства (10) отчета о результатах измерений, содержащего результаты измерений датчиков в соответствии с объемом отчетности, определенным целевым устройством (10) на основе переданной конфигурации отчетности датчиков, причем отчет о результатах измерений содержит смещение целевого устройства относительно опорного положения.
24. Сетевой узел (20) по п. 23, характеризующийся тем, что дополнительно выполнен с возможностью:
передачи целевому устройству (10) запроса о возможностях, связанного с отчетностью датчиков,
получения от целевого устройства (10) информации о возможностях, связанной с отчетностью датчиков.
25. Сетевой узел (20) по п. 23 или 24, в котором результаты измерений датчиков, полученные от целевого устройства (10), содержат результаты измерений инерционного измерительного блока (IMU).
26. Сетевой узел (20) по любому из пп. 23-25, в котором результаты измерений датчиков, полученные от целевого устройства (10), содержат опорное положение целевого устройства (10).
27. Сетевой узел (20) по любому из пп. 23-26, в котором результаты измерений датчиков, полученные от целевого устройства (10), содержат ориентацию целевого устройства (10) в опорном положении.
28. Сетевой узел (20) по любому из пп. 23-27, в котором результаты измерений датчиков, полученные от целевого устройства (10), содержат результаты измерений магнитометра, результаты измерений светочувствительных датчиков и/или сопутствующие результаты измерений.
29. Сетевой узел (20) по любому из пп. 23-28, характеризующийся тем, что дополнительно выполнен с возможностью определения абсолютного положения целевого устройства (10) на основе полученных результатов измерений датчиков.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ УЛУЧШЕНИЯ ЭФФЕКТИВНОСТИ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 2009 |
|
RU2467518C2 |

