Предпосылки создания изобретения
1. Область техники
Данное изобретение относится к области беспилотных летательных аппаратов (БЛА), а конкретнее - к системам, способам и устройствам для слежения за БЛА и низколетящими объектами.
2. Краткое описание уровня техники
В настоящее время существует проблема, связанная с контролем местоположения находящихся вне области прямой видимости БЛА. Когда БЛА находятся вне области прямой видимости своего оператора или когда они работают автономно или под управлением автономной системы управления воздушным движением, они часто работают значительно ниже той высоты, на которой обычная РЛС управления воздушным движением может "видеть" их. Радар (или РАДАР) - акроним "радиообнаружение и определение дальности". Кроме того, хотя БЛА могут сами сообщать о своем местоположении по сети связи, все еще существует множество ситуаций, в которых БЛА не будет точен при сообщении о своем местоположении или будет временно не способен выполнить это. Кроме того, поскольку летящее на малых высотах БЛА часто оказываются в воздушном пространстве на малом расстоянии друг от друга, а также могут оказываться в одном месте с птицами, шарами и даже с другим пилотируемым воздушным судном, которые самостоятельно не сообщают о своем местонахождении системе управления воздушным движением беспилотных летательных аппаратов, необходим способ независимого слежения за объектами, находящимися на небольшой высоте в воздушном пространстве.
Подобная функция в общем случае выполнялась радиолокационными системами, однако, имеются особые соображения в отношении РЛС, работающих по объектам, находящимся на небольшой высоте, и служащих для обзора воздушного пространства, используемого низколетающими БЛА, которые отличают их от традиционных РЛС. Первым и самым главным является то, что РЛС, предназначенные для обзора околоземной части воздушного пространства, по своей сущности не могут иметь большую дальность действия. Мешающие отражения от земной поверхности или наземных предметов представляют собой существующую проблему для РЛС, которая пытается осуществить обзор околоземной части воздушного пространства на расстояниях обычно связанных с РЛС управления воздушным движением. Также, БЛА и другие объекты, занимающие приземное воздушное пространство, такие, как птицы, имеют размеры, делающие их эффективную площадь отражения радиолокационного сигнала слишком маленькой для того, чтобы можно было заметить со значительных расстояний, характерных для РЛС, осуществляющих управление воздушным движение. Следовательно, необходима радиолокационная система с малой дальностью действия, которая может "видеть" цели с маленьким для радиолокации поперечным сечением и может избежать проблем, связанных с мешающими отражениями от земной поверхности.
Краткое изложение сущности изобретения
Предлагается радиолокационная система слежения за БЛА и другими низколетящими объектами. Согласно предпочтительным вариантам выполнения, система реализована в виде распределенной радиолокационной системы обзора расположенного на небольшой высоте воздушного пространства. Система разработана, чтобы обеспечить слежение за объектами, и она использует беспроводное сетевое оборудование для создания сигналов высокой частоты. Передающая антенна, а предпочтительно несколько передающих антенн, соединена с беспроводным сетевым оборудованием, чтобы излучать сигналы вверх. Передающие антенны системы предпочтительно являются антеннами сотовой связи такие, как, например, установлены на мачтах сотовой связи, служащие для связи с помощью сигналов сотовой связи. Приемная антенна принимает сигналы, излучаемые передающей антенной, и в частности сигналы отраженные от низколетящего объекта такого, как БЛА и другие объекты (например, птицы, воздушные шары и т.п.). Приемная антенна, согласно предпочтительным вариантам выполнения, является отдельной антенной для приема передаваемых сигналов или эхо-сигналов, отраженных от объектов. Предлагается наличие нескольких приемных антенн, и предпочтительно приемная антенна расположена рядом с каждой передающей антенной или в непосредственной близости от нее. В одном месте может быть установлено несколько передающих антенн, и одна или более, чем одна приемная антенна также может быть установлена в месте нахождения передающей антенны или рядом с ней. Присутствие, направление и скорость движения объекта можно определить, используя излучение высокочастотного сигнала передающей антенной, имеющей конфигурацию, позволяющую передавать сигнал связи находящемуся в небе объекту, например, такому, как БЛА, работающему в пределах дальности передачи сигнала антенной. Передаваемые высокочастотные сигналы предпочтительно могут быть сигналами связи, предназначенными для ретрансляции дейтограмм, речевой или другой информации в направлении неба, которые создаются компонентами сети беспроводной связи. Антенна входящей в систему РЛС принимает эхо-сигналы от излученных высокочастотных сигналов, отраженных от объектов, находящихся в пределах дальности распространения излученного сигнала. Антенна РЛС соединена с процессором РЛС, которому передает сигналы и который может быть вычислительным устройством таким, как компьютер, в котором имеется программное обеспечение, содержащее команды обработки информации, поступающей от антенны РЛС. Варианты выполнения системы также имеют конфигурацию, позволяющую им передавать процессору РЛС копию передаваемого в небо сигнала. Следовательно, процессор РЛС получает сигнал от передатчика и получает эхо-сигналы, обрабатываемые в результате того, что этот сигнал был передан вверх (и, возможно, отразился от объектов). Процессор РЛС может иметь конфигурацию, позволяющую минимизировать вероятность возникновения сильных сигналов в результате отражения от расположенной поблизости горы или другого объекта.
Варианты выполнения системы предпочтительно реализуются с несколькими приемными антеннами РЛС, расположенными в месте нахождения направленных вверх передатчиков или рядом с ними. Приемные антенны РЛС расположены таким образом, чтобы они передавали информацию об обнаружении радиолокатором вычислительному устройству такому, как компьютер, который накапливает получаемые от РЛС ответы. Согласно некоторым вариантам выполнения, в том случае, когда антенна РЛС, связанная с процессором РЛС, находится близко от ряда передатчиков, передающих сигналы вверх, процессор РЛС может получать копии сигналов от каждого из этих передатчиков.
Варианты выполнения системы предпочтительно имеют конфигурацию, позволяющую использовать коды от передаваемых в небо сигналов связи между передающими приемопередатчиками. Излучаемый передающий антенной высокочастотный сигнал может включать коды от высокочастотных передаваемых сигналов связи, и эти коды, которые являются частью высокочастотных сигналов связи с БЛА (таких как передача дейтограмм БЛА), могут использоваться процессором РЛС для обнаружения находящихся в небе объектов. Коды могут передаваться вверх, а также могут пересылаться во входящий в состав системы процессор РЛС как часть копии передаваемого сигнала. Согласно некоторым вариантам выполнения, далее устройство обработки информации может обрабатывать информацию, являющуюся результатом радиолокационного обнаружения, от множества процессоров РЛС, чтобы выполнить обнаружение объектов, которые могут находиться в пределах дальности излучения множества передатчиков.
Согласно некоторым вариантам выполнения, устройство обработки информации может представлять собой компьютер, к которому поступает информация, получаемая РЛС, от множества процессоров РЛС, и обрабатывает информацию РЛС для того, чтобы выполнить обнаружение объектов при их движении через контролируемую область воздушного пространства.
Система может быть реализована как распределенная сеть, в которой узел системы имеет конфигурацию, позволяющую обнаруживать сигналы, создаваемые объектами, находящимися в пределах зоны или области, являющейся зоной радиолокационного обзора этого узла. Согласно предпочтительной реализации, процессор РЛС имеет электронную связь с беспроводной сетевой аппаратурой для приема сигналов. Имеется приемная антенна, принимающая излучаемые сигналы, которые включают излучаемые высокочастотные сигналы, которые отражаются от низколетящего объекта такого, как БЛА, птица или другой находящийся в небе объект (например, в пределах находящейся на некоторой высоте над землей области воздушного пространства, контролируемого с целью обнаружения). Процессор РЛС предпочтительно имеет электронную связь с приемной антенной и получает от нее сигналы. Процессор РЛС может обрабатывать сигналы посредством различных прикладных программ для обработки сигналов, которые могут включать обработку с целью формирования луча, а также предварительное формирование сигнала. Полученные при обнаружении сигналы обрабатываются, и предпочтительно система обрабатывает содержащуюся в сигналах информацию и накапливает полученные при обнаружении сигналы, поступающие от узлов сети. Вычислительное устройство соединенное, чтобы получать информацию от процессоров РЛС, входящих в сеть или участок сети, обобщает информацию и следит за объектами во время их движения через участок неба над сетью. Объект может быть идентифицирован по сигналам, и процессор РЛС может выполнить сравнение для распознавания картины объекта путем сравнения с данными о профиле объекта и определить тип объекта. Посредством обработки содержащейся в сигнале информации также можно определить такие характеристики объекта, как движение объекта, его скорость, размер и траектория полета. Вычислительное устройство имеет конфигурацию, позволяющую ему получать от процессоров РЛС, распределенных по всей сети, и обобщать эту информацию, чтобы обнаруживать низколетящие объекты во всей области радиолокационного наблюдения.
Основной отличительный признак представленной радиолокационной системы состоит в том, что она является распределенной, поскольку она основана на распределенной сети наземных передатчиков сигналов связи, например, такой, как сотовая система управления и контроля беспилотных летательных аппаратов, подобная описанной в других моих патентных заявках, находящихся на рассмотрении, а именно в патентной заявке США с регистрационным номером 62/214053, поданной 03.09.2015, и патентной заявке США с регистрационным номером 62/323957, поданной 18.04.2016, полное содержание которых включено в данную заявку как ссылочный материал. Эта представленная сеть позволяет представленной радиолокационной системе иметь часть представленной радиолокационной системы, служащую источником сигнала, относительно близко к целям, обнаружение которых и слежение за которыми, является ее предназначением.
Другой отличительный признак представленной радиолокационной системы состоит в том, что используемые для обнаружения сигналы распространяются главным образом вертикально вверх на небольшой участок неба, а не горизонтально, что позволяет системе в значительной степени избежать отражений от зданий, деревьев и других объектов, вызывающих мешающие отражения от земли и наземных предметов. Следовательно, сигналы для обнаружения можно направлять на конкретный наблюдаемый участок.
Еще один отличительный признак представленной радиолокационной системы состоит в том, что она основана на использовании сигналов связи, первоначальной целью передачи которых является связь с воздушным судном или беспилотным летательным аппаратом, и, следовательно, в соответствии с предпочтительными вариантами выполнения системы, не возникает необходимость в использовании нового сектора и новой передающей аппаратуры. Варианты выполнения системы обнаружения могут быть реализованы в сочетании с системой связи с БЛА и могут использовать некоторые или все элементы сети этой системы.
Кроме того, поскольку сигналы связи часто имеют большую длительность, чем традиционные частотно-модулированные импульсы, используемые в традиционных РЛС, можно воспользоваться в алгоритмах обнаружения и определения дальности увеличением времени накопления, что улучшает работу описанной системы по сравнению с более традиционными радиолокационными системами. Эффект от снижения неоднозначности при определении дальности и повышения распознавания усиливается благодаря использованию бистатических радиолокационных систем непрерывного обнаружения с псевдослучайным кодированием, способом, хорошо известным специалистам в области радиолокации. Благодаря использованию бистатической конфигурации с регулярными сигналами связи, которые в какой-то мере могут естественным образом моделировать псевдослучайный код, представленная система дает такой же выигрыш, как бистатическая радиолокационная система с полностью псевдослучайным кодом.
Эти и другие преимущества изобретения описаны в этом документе и проиллюстрированы на примерах возможных вариантов выполнения.
Краткое описание чертежей
Фиг. 1 - иллюстрация, на которой показан пример варианта выполнения системы слежения за низколетящими объектами, в соответствии с настоящим изобретением.
Фиг. 2 - иллюстрация примера варианта выполнения узла системы, изображенной на Фиг. 1.
Фиг. 3 - схема, иллюстрирующая пример системы обработки информации пассивной РЛС, которую можно использовать в сочетании с системой, предложенной в изобретении.
Подробное описание изобретения
На Фиг. 1-3 изображен пример варианта выполнения системы слежения за низколетящими объектами и в частности системы слежения за низколетящими беспилотными летательными аппаратами (БЛА) и другими объектами. Система может быть реализована в соответствии с раскрытыми здесь способами, и может быть предложено устройство, имеющее конфигурацию, позволяющую реализовать эту систему и способ. Согласно предпочтительным вариантам выполнения, указанная система может быть реализована в сочетании с существующими мачтами сотовой связи. В альтернативном варианте система может быть реализована с существующими мачтами сотовой связи и некоторыми дополнительными компонентами или, согласно некоторым другим вариантам выполнения, она может быть реализована при использовании отдельно установленных мачт, передатчиков и других компонентов, которые предназначены специально для связи с беспилотными/дистанционно-пилотируемыми летательными аппаратами. Согласно еще одному варианту выполнения, система может быть реализована при использовании отдельной распределенной сети наземных передатчиков сигналов связи.
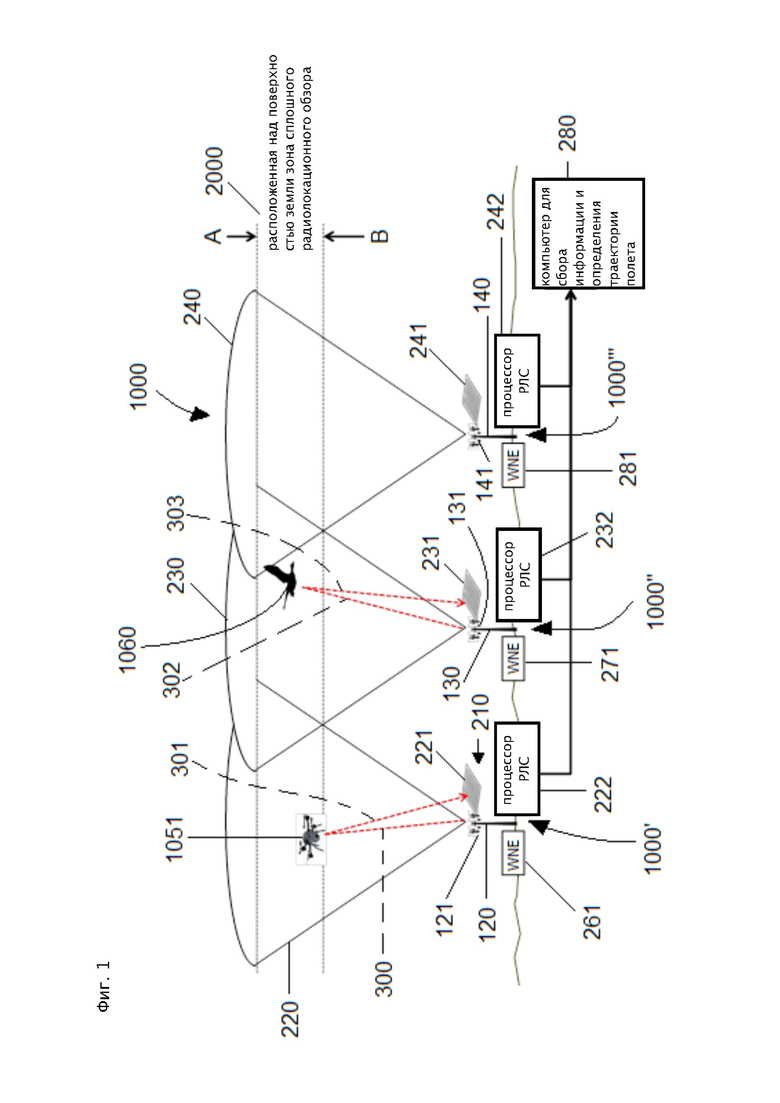
Реализация указанной системы в соответствии с настоящим изобретением показана на примере одного варианта выполнения, в котором компоненты укомплектованы таким образом, чтобы они могли следить за низколетящими объектами, например, такими, как БЛА и другие объекты. В приведенном в качестве примера изображении на Фиг. 1 показано, что когда птица 1060 или БЛА 1051 пролетают через область, покрытую "сотовой" сетью приемопередатчиков дейтаграммы связи, система может следить за ними. Показано, что сеть состоит из узлов 1000', 1000'', 1000''' (а также может включать еще целый ряд узлов, здесь не показанный). Каждый узел 1000', 1000'', 1000''' содержит соответствующую аппаратуру связи и свою собственную местную антенную решетку или фазированную антенную решетку для приема отраженных от объектов сигналов в пределах своей зоны обслуживания, и имеет мощности для обработки сигнала радиолокатора, который объединен в сеть с другими узлами и выдает данные центральному компьютеру 280 сбора информации и слежения, чтобы обеспечить слежение за объектом в данном регионе при его прохождении над множеством узлов, развернутых в этом регионе.
Как показано на Фиг. 1, группа мачт 120, 130, 140 сотовой связи представляет собой сегмент распределенной сети, которая выполняет слежение за БЛА и другими низколетящими объектами. В этом, приведенном в качестве примера варианте выполнения, показана сеть системы 1000 связи и изображены три узла 1000', 1000'', 1000''' (при этом имеются другие подобные узлы, расположенные по всей области, в которой ведется наблюдение, и они образуют распределенную сеть). Показано, что каждый из узлов 1000', 1000'', 1000''' представлен соответствующей мачтой 120, 130, 140, соответствующей соединенной с ней беспроводной работающей в сети аппаратурой связи (WNE) 261, 271, 281, и устройствами для радиолокационного обнаружения. Работающая в сети беспроводная аппаратура связи (WNE) 261, 271, 281 предпочтительно, включает приемопередающую аппаратуру, которая может включать приемопередатчик, соединенный с одной или более чем одной антенной (например, 121, 131, 141). Мачты 120, 130, 140 предпочтительно оборудованы одной или более, чем одной соединительной с ними антенной (например, 121, 131, 141) и могут включать установленные на них антенные решетки. Рассматриваемая система может быть реализована при использовании систем связи, раскрытых в моей патентной заявке США, на которую здесь имеются ссылки, с тем, чтобы приемопередатчики и передающие антенны системы связи с находящимися в небе БЛА могли использоваться совместно с радиолокационной системой обнаружения и предпочтительно - с устройством для радиолокационного обнаружения.
Мачты 120, 130, 140 предпочтительно оборудованы соответствующей аппаратурой связи, или такая аппаратура соединена с ними и, например, может состоять из таких устройств, как приемопередатчики, антенны, источники питания и другие устройства, предназначенные для генерации и приема сигналов сотовой связи. На приведенной в качестве примера иллюстрации, показанной на Фиг. 1, каждая мачта 120, 130, 140 имеет конфигурацию, включающую аппаратуру для генерации высокочастотного сигнала, например такую, как работающая в беспроводной сети высокочастотная аппаратура для приема и передачи дейтаграмм (WNE) 261, 271, 281, соединенная с каждой соответствующей антенной (или антенной решеткой) 121, 131, 141. Работающая в беспроводной сети высокочастотная аппаратура для приема и передачи дейтограмм (WNE) предпочтительно включает компоненты для генерации и приема сигналов через сеть связи (такую, как сеть 1000 Фиг. 1, и ее часть 1000', Фиг. 2) и устройства, обменивающиеся информацией через сеть, например такие, как БЛА 1051, в конфигурацию которого входит собственная приемопередающая аппаратура, позволяющая ему принимать и/или передавать сигналы и дейтаграммы. Работающая в беспроводной сети высокочастотная аппаратура для приема и передачи дейтограмм (WNE) (например, 261, 271, 281) предпочтительно включает компоненты для обработки и генерации сигнала и передает сигналы на множество соединенных с ней антенн 121, 131, 141, которые излучают сигналы вверх, в небо, для связи с БЛА 1051. Предпочтительно сигналы излучаются в форме направленной вверх конической диаграммы направленности, и направленные вверх конусы излучения 220, 230 и 240 изображены, чтобы показать область распространения сигнала. Сигналы излучаются таким образом, чтобы создавалась приподнятая над поверхностью земли непрерывная область радиолокационного обзора 2000. Этого можно достичь путем определенного размещения антенн или их настройки таким образом, чтобы создать требуемую зону обзора РЛС. Зона между стрелками А и В на Фиг. 1 представляет собой зону 2000 сплошного радиолокационного обзора, создаваемую на некоторой высоте над поверхностью земли и, как показано на примере рассматриваемого варианта выполнения, образованную конусами излучения 220, 230, 240, и в особенности приподнятыми над поверхностью земли участками этих конусов. Приподнятая над землей зона 2000 предпочтительно создается в некотором интервале (между стрелками А и В на этой иллюстрации) и представляет собой зону обзора РЛС, в которой может быть обнаружено присутствие низколетящих объектов.
Как показано на Фиг. 1 и 2, высокочастотные сигналы направлены вверх, в небо. Как показано в рассматриваемом примере, излученные сигналы 220, 230, 240 распространяются от соответствующих им и связанных с ними антенн (или групп антенн) 121, 131, 141, что на этой иллюстрации соответствует системе мачт сотовой связи, включающей мачты 120, 130, 140 сотовой связи. Сигналы излучаются вверх, и предпочтительно их можно регулировать с тем, чтобы обеспечить необходимую силу сигнала для связи с устройствами, находящимися в зоне 2000, и/или для получения отраженных от этих устройств сигналов.
Механизм радиолокационного обнаружения показан в сочетании с сетью системы сотовой связи. Изображенная система сотовой связи имеет конфигурацию, позволяющую ей поддерживать связь с БЛА и предпочтительно включает излучающую вверх систему сотовой связи. Направленная вверх система сотовой связи может обеспечить выделение отдельных частот или полосы частот для связи с целью осуществления функцией управления, контроля и/или навигации БЛА (и другой частоты или диапазона частот для других типов связи с БЛА, например, для управления камерой и питанием и т.п.). На иллюстрации Фиг. 1 показано, что механизм радиолокационного обнаружения функционирует в сочетании с организацией сотовой связи. Предпочтительно, механизм радиолокационного обнаружения имеет конфигурацию, включающую антенну или антенную решетку, предназначенную для приема сигналов, и процессор РЛС, предназначенный для обработки этих сигналов. На Фиг. 1 показан пример варианта выполнения системы, включающей механизм 210 радиолокационного обнаружения, предназначенный для обнаружения находящихся в небе объектов, как БЛА и другие объекты. Механизм 210 радиолокационного обнаружения показан на примере первой мачты связи такой, как мачта 120 сотовой связи, в которой имеются обнаруживающая сигнал приемная антенна 221 и соединенный с ней процессор 222 РЛС. Обнаруживающая сигнал приемная антенна 221 предпочтительно может включать приемную (RX) антенну или антенную решетку (например, приемную антенну 221а или антенную решетку 221b), которые принимают высокочастотные сигналы, генерируемые WNE 261 и излучаемые антенной или антеннами 121, и включающие отраженные сигналы, или эхо-сигналы от объектов. Предпочтительно антенна 221 выделена для функций радиолокационного обнаружения. Приемная антенна или антенная решетка 221а, 221b (только для функций радиолокации) могут быть расположены на той же конструкции, например, мачте 120, или рядом с ней, которая используется для антенны WNE или плоской фазированной антенной решетки. Антенну 221 можно разместить на мачте, используемой для беспроводной сети (WNE) или рядом с ней. Например, на Фиг. 1, где система используется в сочетании с беспроводной сетью связи, на мачте 120 изображено несколько антенн 121, (или антенная решетка) служащая для осуществления беспроводной связи через сеть (например, между сетью и передающими сообщения устройствами), а также антенна 221 радиолокатора, также установленная на мачте 120. Дополнительные антенны 231, 241 на соответствующих мачтах 130, 140 показаны выше с соответствующими соединенными с ними процессорами 232, 242 РЛС, которые предпочтительно имеют конфигурацию, позволяющую им работать совместно с соответствующими WNE 271, 281. Конфигурация РЛС позволяет ей обнаруживать БЛА и низколетящие объекты. Согласно предпочтительным вариантам выполнения, радиолокационная система слежения использует сеть 1000, созданную для сигналов связи, для выполнения функций радиолокации. Антенны 221, 231, 241 РЛС могут быть установлены на мачтах 120, 130, 140 сотовой связи и иметь конфигурацию, позволяющую им работать совместно с соединенными с ними компонентами сотовой связи (такими как WNE 261, 271, 281), которые ретранслируют сигналы для обмена информацией между передающими и/или принимающими компонентами сети 1000 связи (которая, например, согласно некоторым вариантам выполнения представляет собой сеть связи для связи с БЛА и управляющими и контролируемыми компьютерами).
Механизм обнаружения РЛС, помимо WNE и антенн 221, 231, 241 РЛС, включат предпочтительно соответствующие им и объединенные с ними процессоры 222, 232, 242 РЛС. Процессор РЛС может иметь конфигурацию, включающую команды мониторирования сигналов, передаваемых от связанного с ними WNE, например, от беспроводного приемопередатчик WNE. Согласно предпочтительным конфигурациям, процессор (222, 232, 242) РЛС связан с мачтой сотовой связи (120, 130, 140) и обеспечивает обнаружение в пределах радиуса действия этой мачты, например, в области распространения сигнала, представленной соответствующими конусами сигналов 220, 230, 240, которые создаются антеннами мачт 121, 131, 141 (см. Фиг. 1). Каждый процессор 222, 232, 242 РЛС имеет конфигурацию, позволяющую ему генерировать или мониторировать сигналы, которые распространяются при помощи связанной с приемопередатчиком антенной (например, такой, как система антенн 121 на мачте 120 на Фиг. 1). Сигнал изображен штриховой линией 300 и, как показано, отражается при встрече с объектом, например, как показано в качестве примера, с БЛА 1051. Отраженная волна, которую также можно назвать эхо-сигналом, изображена штриховой линией 301, и она принимается антенной 221, которая в этом варианте выполнения представляет собой приемную антенну, предназначенную для приема отраженных сигналов (что показано на примере сигнала, отразившегося от БЛА 1051). В конфигурацию БЛА 1051 может быть включен отражатель, например, уголковый отражатель, который делает более заметным отраженный сигнал при его возвращении в узел с РЛС. Процессор 222 РЛС предпочтительно имеет конфигурацию, включающую вычислительные устройства, которые могут принимать, накапливать и обрабатывать данные для того, чтобы выполнить обнаружение объектов, находящихся в воздушном пространстве, за которым ведется наблюдение методом радиолокации (например, низколетящих объектов).
На Фиг. 1 показано, что сеть 1000 сотовой связи (или ее часть) имеет конфигурацию, позволяющую обеспечить связь с низколетящими объектами такими, как БЛА через воздушное пространство. Система радиолокационного обнаружения распределена по сети расположенных на земле передатчиков сигналов связи, которая предпочтительно включает компоненты сети 1000. Компонент радиолокационной системы, являющийся источником сигнала, может иметь конфигурацию, позволяющую ему находиться относительно близко к таким целям, как БЛА и другие низколетящие объекты, для обнаружения которых предназначена предложенная система.
Радиолокационная система обнаружения находящихся в небе объектов показана на примере формирования зоны радиолокационного обзора 2000. Можно осуществлять слежение за объектами, находящимися внутри этой зоны. Например, на Фиг. 1 объект, представленный в виде птицы 1060, изображен находящимся в зоне 2000 непрерывного радиолокационного обзора в пределах конуса 230 излучения сигнала, генерируемого работающей в беспроводной сети высокочастотной аппаратурой для приема и передачи дейтаграмм (WNE) 271, которая связана с мачтой 130 и установленными на ней антеннами 131. Показан присоединенный процессор 232 РЛС, который принимает данные, предпочтительно включающие копию сигнала, передаваемого WNE 271. Предпочтительно система имеет конфигурацию, позволяющую генерировать сигналы в пределах области распространения сигнала, например, такой, как область, представленная конусом 230, который может включать короткий пакетный сигнал связи, который принимается ближайшей расположенной к нему приемной антенной 231 и за которым ведется наблюдение при помощи компонента, предназначенного для обработки сигнала и/или слежения за сигналом, например, такого, как процессор РЛС 242. В представленном варианте выполнения сигнал 302 передается от передатчика (например, передатчика WNE 271) и в зоне 2000 встречает птицу 1060. Сигнал 302 достигает птицы 1060 и этот сигнал в виде эха 303 отражается от птицы 1060. Отраженный сигнал 303 принимается приемной антенной 231 и становится доступным для процессора 232 РЛС. Теперь процессор имеет копию сигнала, переданного от WNE 271 и эхо-сигнал 303.
Согласно представленному предпочтительному варианту, система имеет конфигурацию, позволяющую ей работать посредством сети связи и предпочтительно посредством распределенной сети сотовой связи. Предпочтительно система включает накопительное вычислительное устройство такое, как накопительный следящий компьютер 280. Накопительный следящий компьютер 280 предпочтительно имеет электронную связь для получения данных, которые могут быть в виде сигналов, связанных с распространением и приемом сигналов обнаружения, или могут являться побочным продуктом этих сигналов. Накопительный следящий компьютер 280 предпочтительно имеет конфигурацию, позволяющую ему функционировать в качестве центрального вычислительного ресурса для множества узлов системы сетевой связи. Например, накопительный следящий компьютер 280 может быть связан со множеством узлов в каком-то регионе и тем самым обеспечивать слежение в этом регионе за такими объектами, как БЛА и другие низколетящие объекты. Накопительный следящий компьютер 280 принимает информацию об обнаружении от всей сети 1000 и обрабатывает ее и, как показано, получает информацию в виде сигналов от узлов сети 1000', 1000'', 1000'''.
На Фиг. 2 изображен взятый в качестве примера вариант выполнения, на котором показан узел 1000' радиолокационной системы 1000 обнаружения, предназначенной для обнаружения БЛА и других низколетящих объектов, находящихся в пределах некоторой зоны или области воздушного пространства, и слежения за ними. В изображенной системе показана система связи, предназначенная для обмена информацией с БЛА путем излучения сигнала вверх системой антенн. Показано, что узел 1000' включает вышку 120, конфигурация которой включает антенны 121 и работающую в беспроводной сети высокочастотную аппаратуру для приема и передачи дейтограмм (WNE) 261. WNE 261 предпочтительно является частью сети связи 1000, и имеет электронную связь, позволяющую обмениваться информацией такой, как сообщения и другие данные посредством сети 1000. Показано, что узел 1000' включает часть системы слежения. На Фиг. 1 показаны три узла, включая первый узел 1000', второй узел 1000'' и третий узел 1000'''. Узлы 1000', 1000'' и 1000''' образуют сеть 1000 связи предпочтительно размещены таким образом, чтобы обеспечить радиолокационный обзор над всей зоной или областью, которую необходимо контролировать. Предпочтительно узлы располагаются таким образом, что создается зона устойчивого радиолокационного обзора в области 2000 воздушного пространствах в тех районах, где требуется осуществлять слежение. На Фиг. 1 показаны три области, образованные соответствующими конусами 120, 130, 140. Предпочтительно система имеет конфигурацию, включающую дополнительные мачты и WNE, для того, чтобы обеспечить выход за пределы сети (кроме тех областей, которые обслуживаются тремя узлами на Фиг. 1). Вычислительное устройство, в котором предпочтительно предусмотрен приемопередатчик (который может быть выполнен как часть WNE 261 или быть с ней связанным), имеет конфигурацию, позволяющую генерировать высокочастотные сигналы связи, которые излучаются антенной 121 и распространяются в направлении неба. Это можно осуществить как часть сети сотовой связи, а конкретнее - при помощи направленных в небо систем связи, которые были раскрыты в моих предыдущих заявках и на которые здесь имеются ссылки. Радиолокационную систему обнаружения можно реализовать, используя предложенные компоненты в сочетании с существующими сотовыми системами (а также с сотовыми системами, предназначенными для связи через предназначенную для связи область воздушного пространства.
Система имеет конфигурацию, позволяющую ей осуществлять мониторинг сигналов, излучаемых антеннами. Передающие антенны 121, 131, 141, предпочтительно получают высокочастотные сигналы от соответствующих связанных с ними WNE 261, 271, 281. Сигналы распространяются вверх, в небо. Предпочтительно создаются конусы сигналов, которые образуют множество узких направленных в небо зон радиолокационного обзора, которые огибают или могут работать обходя сооружения. Предпочтительно сигналы распространяются таким образом, чтобы создать зону обнаружения, состоящую из более мелких областей, которые можно объединить и создать расширенную зону обзора. Предпочтительно сигнал генерируется с уровнем, достаточным для того, чтобы он мог достичь области, в которой могут работать БЛА (и в которой могут присутствовать другие объекты, которые требуется обнаруживать). Генерируется излучаемый сигнал. Излучаемый сигнал передается на антенну 121 для излучения этого сигнала вверх, а копия этого сигнала также передается на процессор 222 РЛС. Следовательно, процессор 222 РЛС получает сигнал, а также он получает время генерации этого сигнала. На практике генерируется множество сигналов, и копии этих сигналов вместе с моментами времени их генерации, частотами, данными о модуляции (и другими характеристиками) отслеживаются процессором 222 РЛС. Предпочтительно процессор 222 РЛС соединен с приемной антенной 221 и получает от нее сигналы. Приемная антенна 221 предназначена для приема сигналов, которые генерируются предающей антенной 121, включая сигналы, которые могли быть отражены от объекта такого, как БЛА 1050 (или другого объекта, находящегося в пределах зоны обнаружения). Отраженный сигнал 301 обрабатывается и сравнивается с копией генерированного сигнала (поступающего на процессор РЛС, например, от WNE 261). Отраженные сигналы, принимаемые приемной антенной, могут быть приняты вместе с другими сигналами. Обработка сигналов, полученных от приемной антенны (такой, как антенна 221), выполняется для того, чтобы отделить отраженные сигналы, или эхо-сигналы, которые, как предполагается, возникли в результате присутствия летящих объектов в зоне обнаружения. Например, копии сигналов поступают на процессор РЛС в течение непрерывного интервала времени, и даже если не принимается никакой отраженный сигнал (или не принимается никакой сигнал, указывающий на присутствие объекта), например в пределах конкретного временного интервала или на определенной частоте сигнала, процессор РЛС продолжает сохранять режим слежения. Однако, если принимается сигнал от находящегося в небе объекта, процессор РЛС распознает обнаружение объекта и может дальше обрабатывать этот сигнал вместе с другими принимаемыми сигналами для того, чтобы определить положение и перемещение объекта. Радиолокационная система обнаружения предпочтительно имеет конфигурацию, позволяющую продолжать следить за сигналами даже во время обработки отраженного сигнала обнаружения и идентификации обнаруженного объекта. Процессор РЛС может идентифицировать более, чем один объект находящийся в области воздушного пространства, контролируемой этим узлом (или другой области, которую этот процессор РЛС должен контролировать). Согласно некоторым вариантам выполнения, система может иметь конфигурацию, позволяющую ей использовать те же частоты, что используются для связи с БЛА. Например, если информация передается от антенны 121 в направлении неба и предназначена для БЛА 1051, работающего в зоне 2000 (например, в одном поддиапазоне, используемом для коммерческих целей, например, для получения изображений, доставки грузов и т.п., или в другом выделенном поддиапазоне, зарезервированном для связи с БЛА при критических режимах работы и выполнения таких функций как управление, контроль и навигация), процессор РЛС может также получать копию сигнала. Сигнал создается беспроводной сетевой аппаратурой (WNE) и предпочтительно излучается антенной 121 на определенной частоте, и копия этого сигнала поступает на процессор 222 РЛС. Процессор 222 предпочтительно является процессором пассивной РЛС и может иметь конфигурацию, позволяющую обрабатывать информацию сигнала в соответствии с любым из множества хорошо известных способов. Варианты выполнения процессора РЛС такого, как процессор 222 РЛС, могут включать вычислительное устройство такое, как процессор, микропроцессор, контроллер, микроконтроллер, интегральная схема и другие схемные решения для обработки информации, а также запоминающие устройства такие, как флэш-память или другие интегральные ЗУ, накопитель на жестком диске или подобные устройства, предназначенные для хранения команд, которые используются для того, чтобы дать процессору команду выполнить обработку сигналов, принимаемых приемной антенной. Процессор РЛС 222 предпочтительно может иметь конфигурацию, позволяющую ему хранить информацию исходного или обработанного сигнала и/или передавать информацию другому вычислительному устройству для дальнейшей обработки или хранения. Например, на иллюстрации на Фиг. 1 показаны три процессора 222, 232, 242 РЛС, которые связаны с узлом беспроводной сети и WNE этого узла. Процессоры 222, 232, 242 на иллюстрации соединены для обмена информацией с компьютером, который определен как накопительный компьютер 280 слежения. Компьютер 280 слежения может получать исходную информацию от процессоров 222, 232, 242 РЛС или, согласно некоторым вариантам выполнения, может получать данные обработанного сигнала или данные частично обработанного сигнала. Накопительный компьютер 280 слежения предпочтительно может идентифицировать находящиеся в небе объекты такие, как БЛА и другие низколетящие объекты в областях воздушного пространства, которые контролируются с помощью сети. Накопительный компьютер 280 сам или с помощью других вычислительных устройств может контролировать воздушное пространство и выдавать сигналы опасности в случае возникновения потенциально опасных ситуаций, например, если объекты приближаются друг к другу (например, если БЛА 1051 приблизится к птице 1060, см. Фиг. 1). Радиолокационная система слежения может работать совместно с системой управления полетами БЛА и может быть интегрирована с автономной системой управления воздушным движением, которая контролирует работу автономно работающих БЛА или управляет ей. Радиолокационная система может иметь конфигурацию, позволяющую обрабатывать сигналы радиолокатора, чтобы предупреждать об опасных ситуациях или осуществлять управление БЛА, что может включать управление работой БЛА или ее контроль (например, траекторией полета, направлением, скоростью и т.п.), если подтвердится обнаружение потенциальной угрозы или риска (например, находящиеся рядом воздушный шар или птица). Например, управление воздушным движением БЛА может привести БЛА в режим зависания, если будет определено, что траектория его полета может совпасть с траекторией другого, находящегося поблизости объекта (который может перемещаться или останавливаться неподвижным в области полета БЛА).
Обработка радиолокатором информации сигнала, принятого приемными антеннами 221, 231, 241 может выполняться в соответствии с известными способами обработки сигнала РЛС. Согласно взятому в качестве примера варианту выполнения, процессор пассивной РЛС (такой, как любой из процессоров РЛС 222, 232, 242) имеют конфигурацию, позволяющую принимать сигналы от антенны (221а или 221b, 231, 241, как показано на Фиг. 1 и 2), и обрабатывать эту информацию таким образом, чтобы выработать информацию о положении, размере и движении объекта в контролируемой области воздушного пространства. Эта информация позволяет обнаруживать объект, а также следить за этим объектом во время его движения в контролируемой области. Перемещение находящегося в небе объекта, включая его направление и скорость, может быть определено при помощи радиолокационной системы обнаружения. Эту систему обнаружения также можно использовать для получения информации о самом объекте, а также, чтобы отличить один тип объекта от другого и/или идентифицировать тип объекта или вероятный тип объекта. Например, одну структуру сигнала можно идентифицировать как соответствующую БЛА, а другая структура сигнала позволяет идентифицировать объект как птицу. Предпочтительно система имеет конфигурацию, позволяющую обрабатывать информацию сигнала, и в ней могут иметься образцы, которые соответствуют объектам, которые, как ожидается, потребуется идентифицировать, например таким, как БЛА, птицы, воздушные шары и т.п. В качестве эталонов для конкретного объекта может храниться один или более, чем один образец для идентификации. База данных образцов сигналов может быть создана с использованием ожидаемых или ранее обнаруженных известных объектов, которые могут находится в контролируемой области. В базу данных можно обращаться для сравнения, когда приемная антенна радиолокационной системы примет отраженные сигналы. Предпочтительно это выполняется при помощи процессора такого, как процессор РЛС (например, 222, 232, 242) или накопительный компьютер слежения 280.
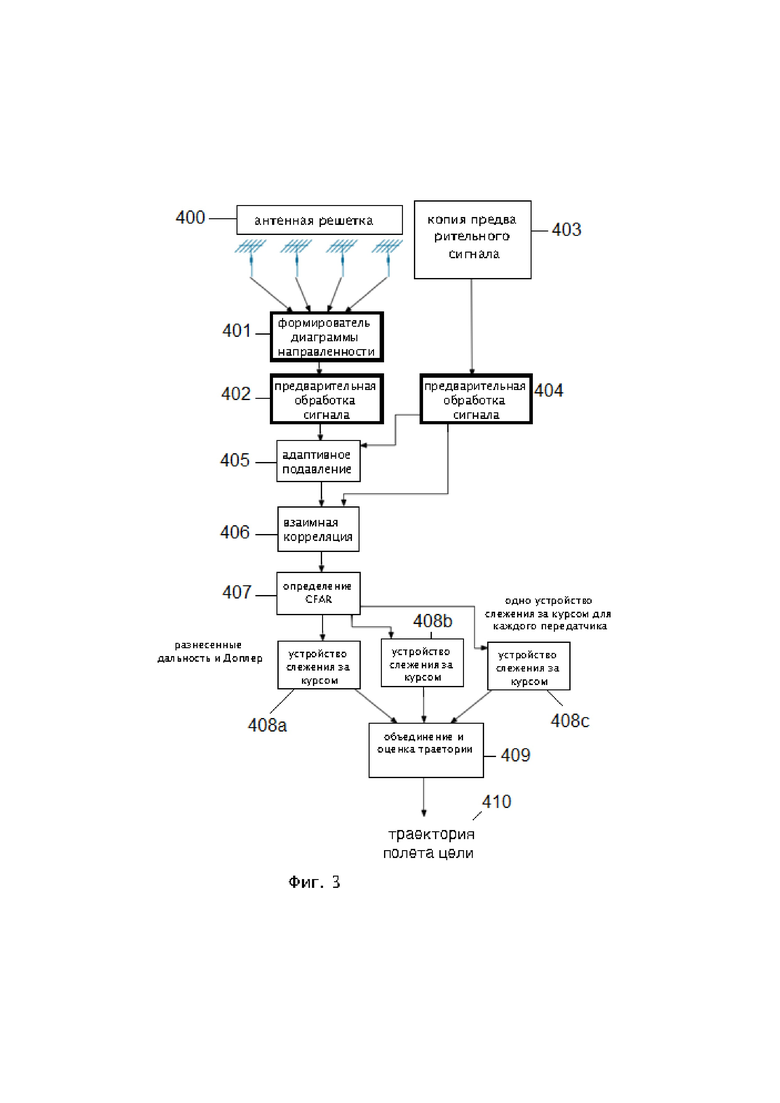
Фиг. 3 иллюстрирует один пример способа, который можно реализовать в сочетании с обработкой РЛС сигналов, принимаемых приемными антеннами. Как показано на Фиг. 3, антенная решетка, блок 400, представляет собой множество антенн. Это множество антенн, например, может быть таким, какое показано в связи с системой на Фиг. 1, с такими антеннами, как приемные антенны 221, 231, 241 (и приемные антенны или решетка 221а, 221b на Фиг. 2). Согласно некоторым вариантам выполнения, антенная решетка может быть простой антенной решеткой, конструкция которой включает несколько элементов антенной решетки и цифровое кодирование на уровне элемента. Цифровое формирование диаграммы направленности антенны, блок 401, выполняется для того, чтобы определить направление прибытия принимаемых сигналов. Направление прибытия отраженных сигналов, или эхо сигналов, можно рассчитать, используя стандартные процедуры формирования диаграммы направленности РЛС. Хотя изображено несколько элементов антенной решетки, согласно некоторым вариантам выполнения, можно использовать пару элементов антенной решетки и использовать разность фаз прибытия для определения направления прибытия эхо-сигналов. Согласно некоторым вариантам выполнения, можно использовать фазированную антенную решетку. Принятый сигнал предпочтительно подвергается предварительной обработке сигнала, блок 402. Кроме того, копия передаваемого сигнала, блок 403, также может быть подвергнута предварительной обработке, блок 404. Предварительную обработку сигнала можно выполнить для того, чтобы обработать некоторые части сигнала до расчета кросс-корреляции, блок 406. Предварительная обработка сигнала, блоки 402, 404, может быть выполнена с целью улучшить отношение сигнал-помеха. Хотя блок формирования диаграммы направленности, блок 401, изображен отдельно, он может включать часть предварительной обработки сигнала. Процессор РЛС предпочтительно имеет конфигурацию, включающую адаптивный фильтр. Предпочтительно адаптивный фильтр используется таким образом, чтобы при обработке сигнала можно было удалить прямой сигнал. Адаптивную фильтрацию также можно назвать адаптивным подавлением, блок 405. Согласно некоторым вариантам выполнения, например, адаптивная фильтрация выполняется путем анализа корреляционных характеристик принимаемых по различным каналам данных. Таким образом можно идентифицировать присутствие преднамеренных помех и мешающих отраженных сигналов, принимаемых боковыми лепестками диаграмм направленности антенны. Каналы можно комбинировать в соответствии с набором весовых коэффициентов и тем самым создавать антенну с высоким коэффициентом усиления главного лепестка диаграммы направленности и в общем случае с малыми боковыми лепестками. Адаптивная фильтрация также может комбинировать сигналы и присваивать весовые коэффициенты, чтобы на диаграмме направленности антенны образовался нуль, соответствующий углу поступления преднамеренных помех. Показанный здесь пример обработки сигнала РЛС может включать расчет взаимной корреляции, блок 406. Расчет взаимной корреляции, блок 406, предназначен для представления подобия двух последовательностей как функции запаздывания одной относительно другой. На примере обработки сигнала РЛС взаимная корреляция, блок 406, дает оценку бистатической дальности и бистатическому доплеровскому смещению для каждого эхо-сигнала от цели. Взаимная корреляция работает здесь как согласованный фильтр. Это можно осуществить, имея банк согласованных фильтров, при этом каждый из них согласован с доплеровским смещением от определенной цели. Выполняется обработка согласно алгоритму усреднения по зоне обслуживания постоянных вероятности ложных тревог (CAFR), блок 407. Блок 407 обнаружения по постоянной вероятности ложных тревог предназначен для обнаружения целей. Для того, чтобы обнаружить цели на поверхности взаимной корреляции, применяется адаптивный порог. Процессор РЛС может иметь конфигурацию, позволяющую ему выполнить обнаружение целей по постоянной вероятности ложных тревог так, что все эхо-сигналы находящиеся выше поверхности взаимной корреляции, считаются целями обнаружения. Слежение за целями (такими, как БЛА и другие низколетящие объекты) предпочтительно выполняется в течение длительного времени, и, следовательно, можно проверить информацию об их движении, направлении и скорости. Например, в том случае, когда такие объекты, как БЛА, птицы, воздушные шары и т.п. перемещаются в пределах контролируемой области воздушного пространства, можно наблюдать и обнаружить сдвиги частоты в эхо-сигналах, отраженных от этих движущихся объектов (эффект Доплера). Пользуясь этой информацией, можно получить местоположение низколетящего объекта такого, как БЛА, птица и т.п., а также то, в каком направлении двигается этот объект и с какой скоростью. Предпочтительно, чтобы для каждого передатчика в системе, или в комплексе для каждого передатчика в части контролируемой с помощью сети области, слежение за курсом осуществлялось посредством устройства слежения за курсом, блоки 408а, 408b, 408 с (представляющие собой устройства слежения за курсом для соответствующего передатчика). Например, как показано на Фиг. 1, передатчики 261, 271, 281 предпочтительно создают сигналы, связанные с соответствующими устройствами 408а, 408b, 408с слежения за курсом. Процессор РЛС может иметь конфигурацию, позволяющую реализовать слежение за траекторией отраженных от отдельных целей сигналов. Предпочтительно это можно осуществить в течение некоторого времени в пространстве дальность - Доплер, образованном при расчете взаимной корреляции, блок 406. Включение сопровождения цели и определение курса, блок 409, выполняется для того, чтобы определить положение БЛА или другого низколетящего объекта. Включение сопровождения цели можно осуществить при использовании одного передатчика и одного приемника или, согласно некоторым вариантам выполнения, можно осуществить при использовании нескольких приемников, при этом объект такой, как БЛА или другой объект, потенциально может быть обнаружен каждым приемником, привязанным к одному или более, чем одному передатчику. Хотя взятый в качестве примера вариант выполнения показан со множеством узлов, и показан передатчик, привязанный к каждому из принимающих узлов, система может иметь такую конфигурацию, в которой используется множество приемников для приема сигналов, распространяемых передатчиком на одной мачтовой антенне, и отраженных сигналов; и принятые сигналы обрабатываются с целью определить, какие отраженные от целей сигналы одного передатчика соответствуют сигналам на других приемниках. Отраженные сигналы объединяются для того, чтобы определить местоположение объекта, используя информацию из сигналов, получаемую из отраженных сигналов, принимаемых одним или более, чем одним приемником. Траектория полета цели, блок 410, формируется по данным обработанного сигнала и показывает направление, скорость и местоположение БЛА (или другого объекта). Следовательно, это является одним из примеров обработки сигнала РЛС, и другие способы обработки сигнала РЛС можно использовать для того, чтобы обработать информацию в сигналах, полученных из сетевой системы, и получить местоположение БЛА и траекторию его полета.
Как показано на Фиг. 2, траектория излученного сигнала обозначена позицией 305. Сигнал или луч 305, испускаемый передатчиком 121, встречает объект, БЛА 1051, находящийся в зоне радиолокационного обзора. На Фиг. 2 БЛА 1051 переместился относительно своего положения, изображенного на Фиг. 1. Для справки, БЛА находится в области воздушного пространства, представленного конусом 220 сигнала. Согласно одному примеру, слежение за лучом можно выполнить для того, чтобы проследить за движением объекта такого, как БЛА 1051. Когда луч сигнала 305 достигнет БЛА 1051, некоторая его часть может быть поглощена или рассеяна каким-то другим образом. Луч сигнала 306 представляет собой сигнал, отраженный от БЛА 1051 (отраженная часть луча 305), который может принять приемная антенна 221а или 221b. Предпочтительно процессор 222 РЛС имеет информацию о луче сигнала 305, благодаря получению копии сигнала 310. Хотя изображены один типичный луч сигнала 305 и один отраженный луч 306 сигнала, в зоне 220 может быть излучено множество лучей сигналов, и траектория каждого отраженного сигнального луча идентифицируется, и процесс повторяется, чтобы получить траекторию БЛА 1051.
Согласно предпочтительным вариантам выполнения, система реализуется вместе с аппаратурой беспроводной сети, предназначенной для системы беспроводной связи. Например, передатчик может излучать сигнал, который может содержать непрерывно излучаемый сигнал, который после излучения и отражения от объекта принимается приемной антенной, связанной с процессором РЛС. Согласно предпочтительным вариантам выполнения, излученный сигнал представляет собой высокочастотный сигнал, используемый для сотовой связи (например, такой как передаваемый на БЛА сигнал от направленного вверх передатчика/антенны). Согласно предпочтительным вариантам выполнения, процессор РЛС получает копию излучаемого сигнала (которую можно назвать прямым сигналом) и также получает (через связанную с ним приемную антенну) отраженные от объекта сигналы. Отраженные сигналы не являются прямыми (и их можно считать рассеянными). Процессор РЛС имеет конфигурацию, позволяющую принимать сигналы (как прямые, так и отраженные) и разделять эти сигналы. Характеристики сигналов (например, такие как время излучения, время приема, частота и данные о модуляции) передаются процессору РЛС, и он анализирует их, чтобы установить в результате этого факта обнаружения. Поскольку объект (такой, как БЛА или птица) остаются в пределах зоны обнаружения, где происходит излучение сигналов, процессор РЛС продолжает принимать отраженные сигналы, и движение объекта и его положение можно видеть и следить за ним. Область обнаружения может включать несколько зон обнаружения, что позволяет следить за объектами по всей области. Процессоры РЛС могут быть выполнены как часть сети, чтобы обеспечивать информацией компонент радиолокационной системы, который может быть объединяющим сетевым компьютером, работающим в сети с процессорами РЛС. В альтернативном варианте в одном узле может находится несколько процессоров РЛС, и этот узел объединяется с процессорами РЛС других узлов.
Согласно некоторым вариантам выполнения, можно определить моменты времени прибытия сигнала и использовать их для получения радиолокационного ответа об обнаружении. В некоторых вариантах выполнения процессор РЛС может иметь конфигурацию, позволяющую ему выполнять обработку с целью разделить сигналы. В том случае, когда объект такой, как БЛА или птица, находится в движении, движение объекта может вызывать доплеровский сдвиг частот в отраженном или рассеянным, например, от БЛА или птицы сигнале. Сдвиг облегчает разделение этих двух сигналов по частоте. Обработка сигнала РЛС может быть выполнена в соответствии со способами обработки, предназначенными для обнаружения и оценки сигналов. Разделение сигналов дает возможность выявить присутствие объекта в контролируемой области воздушного пространства.
Согласно некоторым вариантам выполнения системы, при передаче сигналов можно использовать коды передачи, которые налагаются на высокочастотную несущую. Коды могут быть созданы в виде дискретных уровней фазы передатчика. Коды могут быть случайными кодами, являясь псевдослучайными кодами, поскольку они могут повторяться после L бит. Передача может включать кодовое слово или последовательность длиной L бит, которая периодически повторяется в зависимости от количества N ступеней сдвигового регистра. Например, для L бит выражение может иметь вид L=2N-1 для N ступеней сдвигового регистра. Согласно одному варианту выполнения, также предусмотрен генератор тактовых импульсов, и его конфигурация позволяет подавать их в регистр сдвига кодирующего устройства. Например, каждый раз, когда подается тактовый импульс, состояние сдвигового регистра может сдвинуться на одну ступень (например, вправо, если рассматривать линейное представление). Согласно предпочтительным вариантам выполнения, коды, включая псевдослучайные коды, представляют собой коды, образованные вместе с передачей сигналов приемопередатчиком WNE на высокочастотной несущей.
Процессоры РЛС, представленные на иллюстрациях, могут быть выполнены как отдельные компоненты или могут быть выполнены соединенными с одним или более, чем одним аппаратным средством, размещенным в распределенной сети. Хотя один вариант выполнения показан на Фиг. 3, процессор пассивной РЛС может обрабатывать принимаемые сигналы согласно любому из множества способов, отличающихся от изображенного на Фиг. 3.
В вариантах выполнения этой системы используется передача сигналов связи, которые излучаются для обмена информацией с БЛА в зоне радиолокационного обзора. Согласно нескольким альтернативным вариантам выполнения, альтернативный вариант можно реализовать для того, чтобы выдавать информацию в отсутствие излучения сигналов связи, например, в том случае, когда в зоне радиолокационного обзора отсутствуют БЛА. Система в этом альтернативном варианте выполнения может указать направленным в небо системам связи излучать в небо сигнал через одинаковые промежутки времени в отсутствие регулярного передаваемого сигнала связи с БЛА. Согласно альтернативному варианту выполнения, передатчик может посылать периодические или регулярные сигналы в небо. Их может генерировать беспроводная система связи. Согласно некоторым вариантам выполнения, в том случае, когда в течение установленного интервала времени отсутствует передача сигналов связи БЛА, могут быть произведены регулярные излучения сигнала. Согласно некоторым альтернативным вариантам выполнения, регулярная передача сигнала может производиться, когда в течение заранее заданного интервала времени отсутствует передача сигналов связи передатчиком. Альтернативная система также может иметь конфигурацию, позволяющую принимать сигнал от блока обнаружения РЛС, когда, например, регулярная передача сигнала приводит к тому, что процессор РЛС выдает положительный результат обнаружения объекта в контролируемой области или зоне воздушного пространства. Передатчик при получении предупредительного сигнала, показывающего обнаружение объекта РЛС, может продолжить регулярное излучение сигнала для того, чтобы следить за обнаруженным объектом. Можно производить регулярную передачу сигнала, или в альтернативном варианте, можно излучать сигнал непрерывно с тем, чтобы процессор РЛС мог принимать эхо-сигналы от обнаруженного объекта, пока объект остается в пределах зоны обнаружения или двигается через нее. Соответственно, при выходе объекта из зоны и во время периода неактивности система может вернуться к периодическому излучению до тех пор, пока не будет обнаружен другой объект. Согласно этим альтернативным вариантам выполнения, копии периодически передаваемых сигналов могут пересылаться в присоединенный процессор РЛС. Процессор РЛС обрабатывает сигналы, полученные от приемной антенны и копию периодически передаваемого сигнала, что позволяет определить, присутствует ли в этой зоне какой-либо объект, например, птица (или другой не поддерживающий связи объект).
Эти и другие преимущества можно реализовать, используя данные изобретения. Хотя изобретение было описано со ссылками на конкретные варианты выполнения, описание является иллюстративным, и его не следует истолковывать как ограничивающее объем изобретения. Специалисты могут подумать о различных модификациях и изменениях, которые не будут выходить за пределы сущности и объема изобретения, описанных здесь и определенных в прилагаемых пунктах патентных притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| БЕРЕГОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ "РАПАН" | 2014 |
|
RU2565330C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Радиолокационная станция | 2016 |
|
RU2618521C1 |
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| СПОСОБ И КОМПЛЕКС БАРЬЕРНОГО ЗЕНИТНОГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА БАЗЕ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2015 |
|
RU2615988C1 |

Распределенная радиолокационная система сопровождения низколетящих целей содержит беспроводную аппаратуру для создания высокочастотных сигналов, соединенные с ней по крайней мере одну передающую антенну, приемную антенну, процессор РЛС, вычислительное устройство, соединенные определенным образом. Обеспечивается обнаружение низколетящих объектов в зоне радиолокационного наблюдения и слежение за ними. 28 з.п. ф-лы, 3 ил.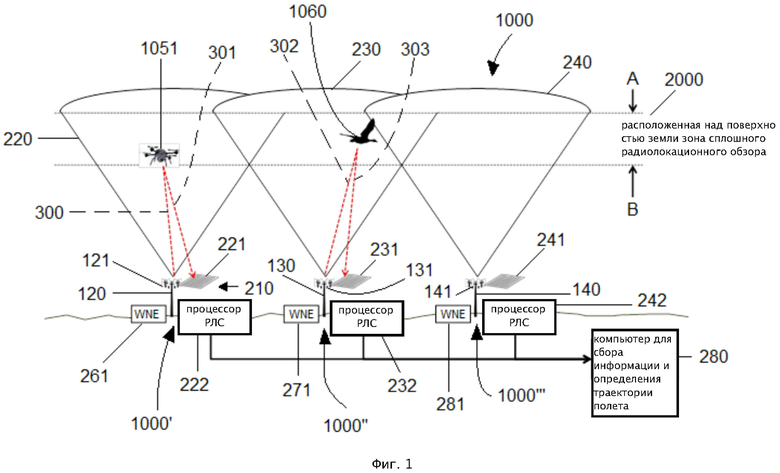
1. Распределенная радиолокационная система сопровождения низколетящих целей, включающая:
a) беспроводную работающую в сети аппаратуру для создания высокочастотных сигналов;
b) по крайней мере одну передающую антенну, соединенную с беспроводной работающей в сети аппаратурой и предназначенную для излучения сигналов в направлении неба;
c) по крайней мере одну приемную антенну, предназначенную для приема сигналов, отраженных от низколетящих объектов;
d) процессор РЛС, имеющий электронную связь с беспроводной работающей в сети аппаратурой для того, чтобы принимать от нее сигналы, и соединенный с приемной антенной, чтобы принимать от нее сигналы;
e) вычислительное устройство, соединенное с процессором РЛС для приема от него информации;
f) при этом вычислительное устройство имеет конфигурацию, позволяющую принимать информацию от нескольких процессоров РЛС, распределенных по всей сети в зоне радиолокационного наблюдения, и при этом указанное вычислительное устройство накапливает указанную информацию для того, чтобы обнаруживать низколетящие объекты в зоне радиолокационного наблюдения и следить за ними.
2. Система по п. 1, в которой указанная беспроводная работающая в сети аппаратура включает приемопередатчик, источник питания и процессор, предназначенный для обработки информации, передаваемой и принимаемой через сеть.
3. Система по п. 1, в которой по крайней мере одна из указанных передающих антенн и указанных приемных антенн включает антенную решетку.
4. Система по п. 1, в которой по крайней мере одна из указанных передающих антенн и указанных приемных антенн включает фазированную решетку.
5. Система по п. 1, при этом указанная система имеет конфигурацию, позволяющую ей обнаруживать высокочастотные отраженные сигналы, отраженные от уголкового отражателя беспилотного летательного аппарата.
6. Система по п. 1, в которой приемопередатчик имеет конфигурацию, позволяющую генерировать сигнал, имеющий круговую поляризацию, и в которой приемная антенна имеет противоположно направленную круговую поляризацию по отношению к сигналу связи приемопередатчика с тем, чтобы уменьшить прямую интерференцию с сигналами связи приемопередатчика и увеличить чувствительность к отраженным от объектов сигналам.
7. Система по п. 1, в которой указанная беспроводная работающая в сети аппаратура имеет конфигурацию, позволяющую поддерживать связь с беспилотными летательными аппаратами.
8. Система по п. 1, в которой имеется несколько комплектов беспроводной работающей в сети аппаратуры, которые образуют ряд узлов.
9. Система по п. 8, в которой указанные узлы имеют конфигурацию, позволяющую генерировать сигналы, указывающие на присутствие объектов в зонах обзора соответствующих узлов.
10. Система по п. 1, в которой несколько передающих антенн соединено с несколькими соответствующими компонентами беспроводной работающей в сети аппаратуры с тем, чтобы с помощью передающей антенны излучать сигналы в направлении неба, при этом каждое указанное множество передающих антенн имеет конфигурацию, которая создает в области воздушного пространства зону радиолокационного обзора; при этом имеется соответствующее множество приемных антенн для приема отраженных сигналов, создаваемых посредством соответствующего множества передающих антенн; при этом каждая приемная антенна расположена рядом с соответствующей ей и связанной с ней передающей антенной, и при этом указанная передающая антенна и указанная соответствующая ей и связанная с ней приемная антенна определяют зону обнаружения соответствующим излучением сигнала и приемом сигнала; при этом указанная система включает множество зон обнаружения; и при этом указанное вычислительное устройство выполняет обнаружение объектов в пределах зон обнаружения и слежение за ними.
11. Система по п. 10, в которой каждая передающая антенна излучает поляризованный сигнал с круговой поляризацией в одном направлении, а каждая соответствующая ей и связанная с ней антенна имеет круговую поляризацию в направлении, противоположном поляризации соответствующей ей и связанной с ней передающей антенны.
12. Система по п. 10, включающая, кроме того, систему управления воздушным движением беспилотных летательных аппаратов, в конфигурацию которой входит по крайней мере один процессор, предназначенный для обработки информации, и которая имеет электронную связь с указанным процессором РЛС, чтобы получать от него информацию, полученную в результате слежения за низколетящими объектами, находящимися в зоне обнаружения, и управлять работой беспилотных летательных аппаратов, управляя одним или более чем одним беспилотным летательным аппаратом с целью минимизировать возможность столкновений с другими беспилотными летательными аппаратами и другими объектами, находящимися в зоне обнаружения и обнаруженными системой.
13. Система по п. 11, включающая, кроме того, систему управления воздушным движением беспилотных летательных аппаратов, в конфигурацию которой входит по крайней мере один процессор, предназначенный для обработки информации, и которая имеет электронную связь с указанным процессором РЛС, чтобы получать от него информацию, полученную в результате слежения за низколетящими объектами, находящимися в зоне обнаружения, и управлять работой беспилотных летательных аппаратов, управляя одним или более чем одним беспилотным летательным аппаратом с целью минимизировать возможность столкновений с другими беспилотными летательными аппаратами и другими объектами, находящимися в зоне обнаружения и обнаруженными системой.
14. Система по п. 1, в которой указанная передающая антенна обеспечивает высокочастотную связь, предназначенную для связи с одним или более чем одним беспилотным летательным аппаратом, беспроводная работающая в сети аппаратура включает по крайней мере один передатчик, при этом высокочастотная связь включает высокочастотные сигналы, генерируемые передатчиком; и в которой указанная приемная антенна имеет конфигурацию, позволяющую ей принимать эхо-сигналы от передаваемых высокочастотных сигналов при их отражении от объектов.
15. Система по п. 14, в которой передатчик, генерирующий высокочастотные сигналы передает копию этих сигналов процессору РЛС.
16. Система по п. 15, в которой сигналы РЛС включают сигналы связи, передаваемые на один из беспилотных летательных аппаратов по крайней мере одной передающей антенной.
17. Система по п. 16, в которой высокочастотные сигналы включают импульсно-кодовую модуляцию.
18. Система по п. 16, в которой коды высокочастотного сигнала с импульсно-кодовой модуляцией включают коды сигналов связи между по крайней мере одной передающей антенной и беспилотным летательным аппаратом.
19. Система по п. 18, в которой указанные коды передаются от указанного передатчика как (I) указанной по крайней мере одной передающей антенне, так и (II) указанному процессору РЛС.
20. Система по п. 18, в которой указанный передатчик соединен таким образом, чтобы передавать указанные коды процессору РЛС.
21. Система по п. 18, в которой указанный передатчик соединен таким образом, чтобы передавать указанные коды нескольким процессорам РЛС, находящимся в пределах дальности передачи сигнала и распространения эхо-сигнала от указанного передатчика.
22. Система по п. 1, при этом указанная система включает систему беспроводной связи для высокочастотной связи с помощью множества передатчиков и соответствующего множества связанных с ними антенн, которые излучают высокочастотные сигналы, поступающие от соответствующего множества передатчиков; при этом имеется множество процессоров РЛС со связанными с ними приемными антеннами, принимающими сигналы, переданные соответствующим множеством передатчиков, которые отразились от находящихся в небе объектов.
23. Система по п. 22, в которой указанное множество процессоров РЛС получают копию высокочастотного сигнала, передаваемого передатчиком.
24. Система по п. 23, в которой указанный процессор РЛС имеет конфигурацию, позволяющую ему обрабатывать разность фаз между отраженным сигналом, принятым антенной, связанной с процессором РЛС, и копией сигнала, полученной от передатчика.
25. Система по п. 1, в которой коды накладываются на несущую частоту передатчика.
26. Система по п. 1, в которой на несущую частоту передатчика накладываются коды, которые содержат псевдослучайные коды.
27. Система по п. 26, в которой указанные псевдослучайные коды генерируются с разрядностью кода L бит, которые периодически повторяются в зависимости от количества N шагов сдвигового регистра, при этом для количества N шагов сдвигового регистра L бит определяется выражением L=2N-1.
28. Система по п. 1, в которой указанная беспроводная работающая в сети аппаратура включает передатчик, передающий высокочастотный сигнал, который излучается указанной передающей антенной, и при этом указанная беспроводная работающая в сети аппаратура передает копию высокочастотного излучаемого сигнала указанному процессору РЛС.
29. Система по п. 28, в которой на несущую частоту передатчика накладываются коды, которые содержат псевдослучайные коды.
| Гидравлические ручные ножницы | 1959 |
|
SU125723A1 |
| Станок для изготовления рабочей поверхности сложной формы, например пуансонов и пуансон-матриц для штамповки стопорных шайб-звезд | 1957 |
|
SU113022A1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| WO 2012149035 A2, 01.11.2012 | |||
| US 20110241928 A1, 06.10.2011 | |||
| US 20130285848 A1, 31.10.2013. | |||

