Изобретение относится к радиолокационным следящим системам, а именно к береговой радиолокационной станции, которая представляет собой комплекс технических средств, предназначенных для решения задач обнаружения и автоматического сопровождения в различных погодных условиях, в том числе при отсутствии оптической видимости, надводных целей, находящихся в зоне прямой радиолокационной видимости, документирования и выдачи информации в автоматизированные системы сбора и обработки информации.
Известна береговая радиолокационная станция миллиметровых волн «Нева-Б», предназначенная для контроля над водной обстановкой, мониторинга и охраны особо важных объектов (http://www.tetis-ks.ru/catalog/256/1400/).
Также известна радиолокационная станция «Атлантика», являющаяся основой для построения системы управления движением судов (СУДС). Конструктивно она включает приемо-передающий РЛС модуль, совмещенный с антенной, блок сопряжения и коммутации, компьютерный радиолокационный индикатор и источник бесперебойного питания РЛМ (http://www.npo-leninetz.ru/produktsiya/radar/radiolocation-station-atlantic/).
Известные станции имеют миллиметровый диапазон волн, что не обеспечивает им необходимую дальность обнаружения объектов слежения, особенно при наличии гидрометеоров (дождь, снег, пыль).
Еще одна известная автоматизированная береговая стационарная радиолокационная станция «Гамма-ПВ» обеспечивает работу в составе автоматизированных информационных систем и позволяет обнаружить и сопроводить малоразмерные надводные цели при волнении моря до 4-х баллов (http://www.npostrela.com/ru/products/museum/84/214/?print=Y).
Эта станция не обеспечивает совместную обработку информации с автоматической идентификационной системой, что снижает надежность обнаружения целей.
Техническая задача изобретения состоит в исключении названных недостатков аналогов.
Эта задача обеспечена техническим результатом, заключающимся в обеспечении надежности и повышении дальности обнаружения объектов слежения.
Названный технический результат достигнут в изобретении с помощью следующей совокупности признаков.
Береговая радиолокационная станция (БРЛС) сантиметрового диапазона частот содержит закрепленный на мачте антенный пост (АП), состоящий из установленной на поворотной платформе антенны, сигнального процессора, приемо-передающего блока, связанного кабелем с приемником автоматической идентификационной системы (АИС) и автоматизированным рабочим местом (АРМ) оператора.
Мачта снабжена монтажным трапом.
Снаружи антенны размещен защитный обтекатель из радиопрозрачного диэлектрического материала.
Тип антенны: рупорно-щелевая антенная решетка.
БРЛС при нормальных условиях радиолокационного наблюдения в пределах прямой радиолокационной видимости обеспечивает радиолокационное обнаружение и сопровождение надводных целей с накопленной вероятностью не ниже 0,9: больших целей (БЦ) - 30 миль, средних целей (СЦ) - 20 миль, малых целей (МЦ) - 15 миль, сверхмалых целей (СМЦ) - 3 мили.
Дальность обнаружения надводных целей зависит от их эффективной площади рассеяния (ЭПР), которая в свою очередь зависит от геометрических размеров и конфигурации цели.
Дальность обнаружения целей зависит также от высоты установки антенного поста и погодных условий. Последние влияют как на затухание электромагнитной энергии, излучаемой БРЛС, так и на величину отраженного от цели сигнала, достигающего приемника станции.
Хотя радиолокационные станции являются самыми всепогодными средствами из всех устройств наблюдения, их характеристики зависят от наличия в атмосфере гидрометеоров.
При этом потери в гидрометеорах тем больше, чем ближе размер содержащихся в атмосфере неоднородностей к длине волны радиолокационной станции (РЛС). Именно поэтому даже сильный туман или дымка не оказывает отрицательного воздействия на дальность обнаружения цели, а дождь и снег влияют значительно.
Сильно маскируют сигнал, отраженный целью, пассивные помехи, создаваемые взволнованной морской поверхностью. Для их подавления в БРЛС используется специальная система селекции (фильтрации). Однако она тоже эффективна при волнении моря не более 2 баллов.
Распознавание целей осуществляется посредством приема и отображения на экране АРМ информации от АИС. Отождествление АИС-целей и радиолокационных целей происходит по приоритету, заданному оператором.
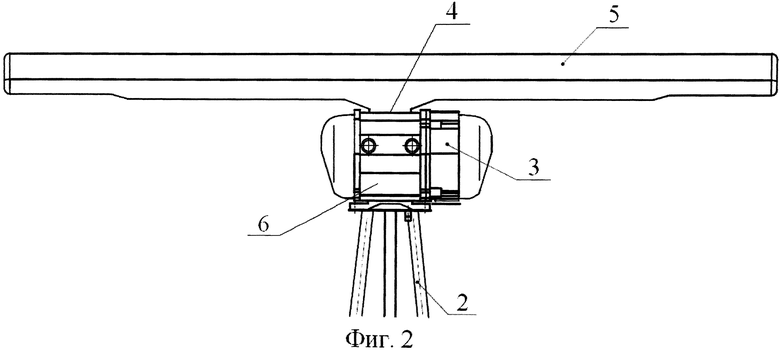
Изобретение поясняется чертежами, где на фиг. 1 схематично изображена БРЛС; на фиг. 2 - антенный пост с антенной.
В состав береговой радиолокационной станции 1 (фиг. 1) входят следующие технические средства: закрепленный на мачте 2 антенный пост 3, включающий в себя: установленную на поворотной платформе 4 антенну 5 и приемо-передающий блок 6, включающий в себя сигнальный процессор, приемник и передатчик, связанные кабелем с приемником АИС 7. Также БРЛС оснащена АРМ оператора 8.
Мачта 2 снабжена монтажным трапом 9.
Снаружи антенны 5, выполненной в виде рупорно-щелевой антенной решетки, размещен защитный обтекатель из радиопрозрачного диэлектрического материала (фиг. 2).
В состав БРЛС также входит комплект программного обеспечения (ПО) и инструменты и принадлежности ЗИП-О.
АРМ включает: стол-пульт 10, два процессорных блока с мониторами (ПЭВМ) 11, переключатель клавиатуры и монитора (KVM).
В специальном шкафу размещено вспомогательное оборудование, к которому относится: блок коммутации и питания, коммутатор, две вентиляционные панели, два блока питания, блок розеток, грозоразрядник и источник бесперебойного питания.
Основными техническими характеристиками станции являются следующие:
- режим работы БРЛС - непрерывный, круглосуточный;
- рабочая частота БРЛС - (9410,0±30,0) МГц;
- мощность, потребляемая АП с установленной антенной при максимально допустимой ветровой нагрузке не более 800 Вт;
- пиковая мощность излучения - 25 кВт;
- диаграмма направленности: 0,8° - в горизонтальной плоскости, 20° - в вертикальной плоскости;
- скорость вращения антенны - 24 об/мин;
- количество целей сопровождения - до 100 движущихся и 100 неподвижных целей;
- максимальный габаритный размер антенны - 2825 мм;
- масса АП с установленной антенной - не более 60 кг;
- блок питания (БП) при электропитании от 220 В обеспечивает выходное напряжение 24 В, при максимальном токе нагрузки 40 А.
Работа БРЛС основана на излучении и приеме отраженных от объекта последовательностей электромагнитных импульсов сантиметрового диапазона частот. Азимут цели определяется благодаря узкой диаграмме направленности антенны и ее перемещению в пространстве с помощью угломестного привода в горизонтальной плоскости. Дальность определяется на основе замера времени задержки отраженного сигнала БРЛС относительно зондирующего.
Распространение сигнала от БРЛС меняется в зависимости от состояния слоев воздуха, через которые проходит радиосигнал. В условиях нормального прохождения сигнала дальность его распространения превышает визуальную дальность горизонта примерно на 10%.
АП 3 представляет собой приемо-передающий блок, генерирующий последовательность электромагнитных импульсов с пиковой мощностью излучения 25 кВт и блок управления вращением (сканированием) антенны. Основным активным элементом излучающей системы является магнетрон, который необходимо в обязательном порядке заменять по мере выработки ресурса.
АП имеет поворотную платформу 4 для крепления антенны 5. Волноводная часть АП соединяется с волноводом антенны. АП своей нижней плоскостью крепится к мачте 2, которая входит в состав изделия. Мачта может устанавливаться и закрепляться на вышках или других конструкциях и сооружениях эксплуатирующей организации.
Принятые отраженные сигналы обрабатываются в приемном блоке АП, преобразуются в цифровой вид, затем в информационный поток данных, которые по многожильному кабелю поступают на АРМ.
Антенна 5 является приемо-передающей пассивной антенной решеткой диапазона (9410,0±30,0) МГц. По физическим принципам построения она является рупорно-щелевой антенной решеткой, которая обеспечивает рабочую диаграмму направленности излучения на прием и передачу. Узкая (0,8°) диаграмма направленности в горизонтальной плоскости обеспечивается за счет протяженной щелевой решетки (2800 мм), широкая (20°) в вертикальной плоскости формируется относительно небольшой составляющей рупорной части антенны.
Снаружи антенна полностью закрыта радиопрозрачным диэлектрическим обтекателем, который защищает ее от негативных внешних факторов (дождь, снег, пыль и т.п.). Загрязнения обтекателя, особенно электропроводящие (сажа, помет птиц, металлосодержащая краска и т.п.), значительно ухудшают работу антенны и, как следствие, всей БРЛС. В связи с этим требуется техническое обслуживание изделия, направленное на поддержание обтекателя в чистоте.
Блоки питания предназначены для обеспечения электропитанием АП, в том числе элемента подогрева, обеспечивающего работоспособность изделия при низких температурах внешней среды. Они питаются от сети переменного тока напряжением 220 В, частотой 50 Гц и выдают напряжение постоянного тока 24 В.
Радарный процессор предназначен для обработки первичной радиолокационной информации, преобразование ее в стандартный протокол Ethernet и передачи на АРМ.
Радарный процессор выполняет следующие основные функции:
- оцифровку аналоговых радиолокационных сигналов приемника БРЛС;
- привязку сигналов, отраженных целями, к угловому положению антенны и шкалам дальности;
- управление режимами работы приемника, передатчика и антенны БРЛС;
- автоматического обнаружителя, принимающего решение «есть цель/нет цели»;
- фильтрации сигналов от целей, помех от взволнованной морской поверхности (фильтр «МОРЕ») и от гидрометеоров (фильтр «ДОЖДЬ»);
- осуществляет автоматизированный функциональный контроль составных частей АП изделия;
- обеспечивает работу встроенного осциллографа;
- решает задачи траекторией обработки.
АРМ 8 выполнено на базе двух системных блоков ПЭВМ и предназначено для управления режимами работы БРЛС и отображения радиолокационной и АИС информации на экранах основного и вспомогательного мониторов.
Системные блоки АРМ установлены в специализированную 19′′ стойку, мониторы и клавиатура с трекболом размещаются на столе-пульте 10.
АРМ выполняет следующие основные функции:
- отображение радиолокационной информации и ее архивирование;
- измерение дальности и азимута с помощью курсора, визиров и электронной линии азимута;
- ручной или автоматический режим, отслеживание объекта, индикация вектора и следов движения, сигнализация;
- наложение радиолокационного изображения на стандартные морские электронные карты формата S57;
- индикация маркеров и линий, установка маршрутов движения;
- регулировка чувствительности приемной части системы;
- подавление отражения сигнала от волнения моря и осадков;
- подавление помех;
- самодиагностика;
- контроль характеристик АП.
USB KVM-переключатель обеспечивает поочередное переключение управления на один из системных блоков АРМ.
Приемник АИС 7 предназначен для автоматической идентификации судов, их габаритов, курса, других данных и обеспечивает прием, обработку, декодирование информации, передаваемой установленными на судах транспондерами АИС в УКВ диапазоне.
Гарантированная идентификация судов, подлежащих обязательному оснащению транспондерами АИС, осуществляется в пределах устойчивой УКВ радиосвязи.
БРЛС представляет собой программно-аппаратный комплекс, функционирующий под управлением общего и специального программного обеспечения.
В состав общего программного обеспечения входят следующие программные средства: ОС Windows, SQL Server.
ЗИП-О изделия содержит комплектующие изделия и материалы, необходимые при проведении монтажа изделия, технического обслуживания и текущего ремонта лицами, ответственными за его эксплуатацию, или сервисными службами технического обслуживания предприятия-разработчика.
Комплект ЗИП-О может находиться как на технических базах эксплуатирующей организации (если в месте развертывания аппаратуры его хранение по какой-либо причине невозможно), так и непосредственно в складских помещениях эксплуатирующего подразделения.
ЗИП-О поставляется вместе с изделием и служит для проведения технического обслуживания изделия и регламентных работ в течение всего гарантийного срока его службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА МОНИТОРИНГА ОБСТАНОВКИ, ПРЕДУПРЕЖДЕНИЯ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2558658C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| ПОДВИЖНЫЙ ПУНКТ ЦЕЛЕУКАЗАНИЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2480705C2 |
| МНОГОПОЗИЦИОННЫЙ КОМПЛЕКС С АВТОНОМНЫМИ РАДИОЛОКАЦИОННЫМИ ТЕРМИНАЛАМИ И ГИДРОАКУСТИЧЕСКИМИ ЗОНДАМИ ДЛЯ МОНИТОРИНГА НАДВОДНОГО, ПОДВОДНОГО И ВОЗДУШНОГО ПРОСТРАНСТВА АКВАТОРИЙ | 2013 |
|
RU2558666C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СУДНА И ХАРАКТЕРИСТИК ЕГО ДВИЖЕНИЯ | 2013 |
|
RU2546846C2 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| Система наблюдения за надводной и подводной обстановкой | 2022 |
|
RU2787578C1 |
Изобретение относится к радиолокационным следящим системам (БРЛС), представляющим собой комплекс технических средств, предназначенных для решения задач обнаружения и автоматического сопровождения в различных погодных условиях надводных целей, находящихся в зоне прямой радиолокационной видимости, документирования и выдачи информации в автоматизированные системы сбора и обработки информации. Сущность: БРЛС содержит автоматизированное рабочее место оператора, связанное с закрепленным на мачте 2 антенным постом (АП) 3 с установленной на поворотной платформе антенной 5. АП включает приемо-передающий блок 6, включающий в себя сигнальный процессор, а также приемник и передатчик, связанные кабелем с приемником автоматической идентификационной системы 7. Технический результат: обеспечение надежности и повышение дальности обнаружения объектов слежения. 4 з.п. ф-лы, 2 ил.
1. Береговая радиолокационная станция, содержащая закрепленный на мачте антенный пост, состоящий из установленной на поворотной платформе антенны, сигнального процессора и приемо-передающего блока, связанного с приемником автоматической идентификационной системы и автоматизированным рабочим местом оператора.
2. Станция по п. 1, отличающаяся тем, что мачта снабжена монтажным трапом.
3. Станция по п. 1, отличающаяся тем, что снаружи антенны размещен защитный обтекатель из радиопрозрачного диэлектрического материала.
4. Станция по п. 1, отличающаяся тем, что тип антенны: рупорно-щелевая антенная решетка.
5. Станция по п. 1, отличающаяся тем, что диапазон частот антенны составляет 9410,0+30,0 МГц.
| Радиолокационные станции (РЛС) и радиолокационные комплексы | |||
| Экспериментальный завод | |||
| http://atlantmetal.ru/mezhdunarodnyjj-den-zashhity-detejj.html | |||
| ПРИВОД ВРАЩЕНИЯ ВОЛНОВОДНО-ЩЕЛЕВОЙ АНТЕННЫ | 2011 |
|
RU2458435C1 |
| Компенсатор для золотников гидравлических систем | 1959 |
|
SU127527A1 |
| Зажим для канатных подвесных дорог | 1933 |
|
SU40401A1 |
| СИНХРОННАЯ МАШИНА | 1941 |
|
SU62275A1 |
| АНТЕННЫЙ ПОСТ РАДИОЛОКАЦИОННЫЙ СТАНЦИИ | 2011 |
|
RU2479897C2 |

