Изобретение относится к методам радиолокационного обнаружения воздушных объектов (ВО), в частности к методам обнаружения беспилотных летательных аппаратов (БЛА) с малой радиолокационной заметностью.
Известен способ обнаружения воздушных объектов, в том числе и БЛА, заключающийся в излучении в пространство с помощью радиолокационной станции (РЛС) импульсных зондирующих сигналов, отражении их от ВО, приеме отраженных сигналов антенной системой РЛС, фильтрации отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, сравнении отфильтрованных отражений с порогом и в случае превышения установленного порога - принятии решения о том, что обнаружен движущийся ВО [1-3].
Данный способ используется в большинстве РЛС старого парка и обладает тем недостатком, что достоверное обнаружение возможно только в случае отражений электромагнитных волн (ЭМВ) от типовых объектов с эффективной площадью рассеяния (ЭПР) порядка единиц квадратных метров. В случае же отражения ЭМВ от БЛА, ЭПР которых может составлять от десятых до тысячных долей квадратного метра, мощности отраженных сигналов для превышения порога не хватает, и обнаружение таких объектов невозможно.
Известен также способ обнаружения малозаметных ВО (в том числе и БЛА), предполагающий в отличие от описанного выше способа накопление отражений от ВО, полученных в разных периодах повторения импульсов РЛС [4]. Когерентное накопление (сложение) отраженных сигналов позволяет превысить порог обнаружения даже в случае малой отражающей способности ВО. Для обеспечения когерентного сложения отраженных импульсных сигналов повышают частоту повторения импульсов Fи или, что то же самое, снижают величину периода повторения импульсов Tи. Способ требует, чтобы при заданной скорости обзора пространства минимальное число импульсов Nи мин, принимаемых после отражения от ВО, было достаточным для обнаружения ВО с заданной вероятностью. При выборе частоты повторения используют выражение [4, с.71-72, 89-90]

где Δβ и Δε - величины секторов обзора пространства по азимуту β и углу места ε; Тобз - период обзора пространства; Θβ0,5 и Θε0,5 - ширина диаграммы направленности антенны (ДНА) в азимутальной и угломестной плоскостях по уровню половинной мощности.
Данный способ обнаружения лучше типового, но не позволяет эффективно обнаруживать малозаметные БЛА, поскольку никакой методикой не установлено необходимое число накапливаемых импульсов Nи мин, а при увеличении Fи возникает неоднозначность определения дальности до обнаруживаемого объекта. К тому же в современных РЛС число накапливаемых импульсов не превышает 10-100, чего явно недостаточно для обнаружения малоотражающих БЛА.
Известен еще один способ обнаружения ВО (БЛА) [4], при котором накопление необходимого числа импульсов достигается не только увеличением частоты повторения Fи, но и снижением угловой скорости вращения антенны РЛС. Если знать допустимое число импульсов, сложение энергии которых обеспечивает обнаружение ВО (БЛА) с вероятностью не ниже требуемой, то при числе оборотов антенны РЛС кругового обзора в минуту, равном nа (принимая во внимание только азимутальное вращение антенны), согласно [4, с.90] для обеспечения накопления должно выполняться неравенство

Значит, чем больше требуемое число накапливаемых отраженных импульсов, тем ниже должна быть скорость вращения антенны. Поэтому способ обнаружения ВО (БЛА) предполагает снижение скорости обзора пространства за счет замедления скорости вращения антенны в секторах, где предполагается наличие слабоотражающих ВО, в том числе и БЛА. В остальном же способ обнаружения придерживается традиционных принципов.
Следует подчеркнуть, что в современных РЛС такой способ достаточно активно применяется. Как пример можно привести РЛС кругового обзора типа 9С18М1, в которой периоды или темпы одного оборота антенны вкруговую (полный обзор пространства) составляют 4,5 с, 6 с и 6-18 с при самом низком темпе [5]. Время облучения ВО может изменяться в данной РЛС от 0,02 до 0,053 с. Ширина ДНА по азимуту составляет 1,6°. Число импульсов, которые накапливаются некогерентно в соответствии с принципом работы РЛС 9С18М1, составляет от 16 до 84. Частота повторения импульсов может быть 0,8 кГц или 1,6 кГц. Очевидно, что при обнаружении ВО типа БЛА рекомендовано использовать самый низкий темп обзора с накоплением 84 импульсов. Однако в этом и состоит главный недостаток способа - при низком темпе обзора время просмотра пространства существенно увеличивается и обновление радиолокационной информации происходит редко, что негативно сказывается на результатах обнаружения ВО.
Известными являются также способы обнаружения, использующие наряду с рэлеевской и квазиоптической областью рассеяния резонансную область рассеяния [6, с.15-30]. Если произведение волнового числа k=2π/λ, где λ - длина волны, на размер ВО L много больше 1 (kL>>1), то область рассеяния падающих на объект ЭМВ называется квазиоптической. При kL<<1 область рассеяния признается рэлеевской. И только в случае kL≈1 область рассеяния считается резонансной, в которой ЭПР может сильно возрастать [6].
На этом эффекте основан еще один известный способ обнаружения ВО, имеющих малую отражающую способность. В соответствии с принципами работы устройств, описанных в [7, с.74-82], а также с использованием традиционных методов корреляционно-фильтровой обработки [1-3,8] известный способ обнаружения ВО, включая слабоотражающие БЛА, заключается в следующем. Выбирают частоту f1, соответствующую длине волны λ1, соизмеримой с размером самого большого типового ВО, генерируют высокочастотные электромагнитные колебания на частоте f1, модулируют высокочастотные электромагнитные колебания на частоте f1 по времени, в результате чего формируют импульсный зондирующий радиолокационный сигнал, по прошествии периода повторения импульсов Tи аналогичным образом формируют очередной импульсный зондирующий радиолокационный сигнал и таким образом создают пачку из N импульсных зондирующих радиолокационных сигналов на частоте f1, увеличивают частоту зондирования вдвое с помощью умножителя частоты, формируют пачку импульсных зондирующих сигналов на частоте 2f1 с тем же периодом повторения Tи, затем подобным образом формируют пачку импульсных зондирующих сигналов на частоте 3f1 с периодом повторения Tи и так далее, т.е. последовательно увеличивают несущую частоту пачки зондирующих сигналов из N радиоимпульсов вплоть до формирования пачки зондирующих сигналов из N радиоимпульсов на частоте Kf1, где K - целое число, которой соответствует длина волны, соизмеримая с размером самого малого ВО, усиливают сформированные зондирующие радиоимпульсы по мощности и излучают их в пространство с помощью антенной системы РЛС, последовательно принимают с помощью антенной системы РЛС отраженные сигналы, переводят в цифровую форму и записывают в оперативное запоминающее устройство амплитуды принятых отраженных сигналов каждого периода повторения, причем период дискретизации аналого-цифрового преобразования выбирают не менее чем в 10-30 раз меньшим длительности зондирующего радиоимпульса, разделяют всю совокупность отраженных сигналов на последовательные, соединяющиеся границами, но непересекающиеся и равные по длительности стробы дальности, нумеруют стробы дальности в пределах каждого периода повторения от 1 до M, причем каждый строб дальности равен по ширине длительности зондирующего радиоимпульса τи, детектируют все записанные отраженные сигналы с помощью цифрового фазового детектора для получения квадратурных составляющих отраженных сигналов, т.е. переводят принятые оцифрованные отраженные сигналы в комплексную форму, проводят согласованную обработку оцифрованных принятых сигналов в пределах каждого строба дальности путем свертки с комплексно-сопряженным оцифрованным зондирующим сигналом этого же периода повторения, находят пик отклика отражений в каждом стробе дальности по максимуму его амплитуды, записывают в комплексном виде значения пиков откликов отражений каждого периода повторения в оперативное запоминающее устройство, формируют для каждой k-й из K частот зондирования (для каждой k-й пачки радиоимпульсов) цифровые массивы пиков откликов отражений одинаковых по номеру стробов дальности и получают для отражений на каждой k-й частоте зондирования М массивов с N элементами в каждом массиве, проводят с элементами каждого массива операцию преобразования Фурье, в результате получают для каждого массива соответствующий спектральный массив, в котором при наличии ВО на дальности, соответствующей используемому стробу дальности, будет сформирован спектральный отклик, частотное положение которого соответствует доплеровской частоте отраженного этим ВО сигнала, сравнивают спектральные отклики отраженных сигналов с пороговым значением и в случае превышения спектральным откликом порога фиксируют частоту этого спектрального отклика как частоту его максимальной составляющей в оперативном запоминающем устройстве, а затем принимают решение о наличии на соответствующей дальности ВО, причем в случае превышения порога в m-м массиве на всех K частотах зондирования считают ВО обычным типовым, а в случае превышения порога только на одной из частот зондирования считают ВО слабоотражающим, малозаметным, каким является беспилотный летательный аппарат, а по доплеровской частоте Fд спектрального отклика определяют радиальную скорость обнаруженного ВО по формуле Vr=Fдλk/2, где λk - длина волны зондирующего сигнала k-й несущей частоты (т.е. в k-й пачке радиоимпульсов).
Описанный способ обнаружения малозаметных БЛА эффективнее указанных ранее. Однако и он обладает недостатками. Во-первых, кратное увеличение частоты зондирования не позволяет анализировать отражения на всех без исключения частотах, т.е. существуют области частот, на которых излучение и анализ отражений не осуществляют, но при которых возможно возникновение резонансного рассеяния. Во-вторых, решение об обнаружении БЛА на одной из частот не уточняется, что может приводить к ошибкам, так как возникновение спектрального отклика на одной из K частот в одном из M стробов дальности может быть следствием проявления случайных флюктуаций, бросков питающих напряжений в аппаратуре, кратковременного пролета снаряда, метеорита и т.д. Таким образом, известный способ обнаружения малозаметных БЛА нуждается в совершенствовании.
Задачей изобретения является развитие и совершенствование известного способа резонансного обнаружения малозаметных БЛА, обеспечивающие просмотр всего диапазона частот (перебор всех значений длин волн, соизмеримых с размерами ВО и элементами их конструкции) и уточнение решения, принимаемого по одной реализации излучения пачки радиолокационных сигналов.
Для решения поставленной задачи предлагается осуществлять при зондировании последовательную перестройку частоты радиоимпульсов (сигналов) от одной пачки к другой (от предшествующей к последующей) с шагом перестройки Δf=10 МГц. При этом базовую начальную частоту зондирования предлагается выбрать равной 150 МГц (λ=2 м), а перестройку вести вплоть до 6 ГГц (λ=5 см). Другое предложение заключается в том, что после анализа отражений радиоимпульсов на различных частотах зондирования и выявления факта возникновения превышающего порог спектрального отклика на одной из частот, излучение переводится из режима с перестройкой частоты в одночастотный режим, соответствующий по частоте наличию спектрального отклика от малозаметного (малоотражающего) БЛА. После перехода на выявленную предполагаемую резонансную частоту fp (ей соответствует длина волны λр) результаты обнаружения малозаметного БЛА в соответствующем стробе дальности повторно проверяются. Проверяется также факт соответствия (равенства) доплеровской частоты Fд спектрального отклика в последовательно сформированных спектрах одного и того же строба дальности, а также факт превышения спектральным откликом установленного порога обнаружения. Если в нескольких подряд взятых спектрах (например, в трех) спектральный отклик от БЛА превышает порог и его доплеровская частота Fд остается неизменной, то принимается решение об обнаружении в соответствующем стробе дальности малозаметного БЛА, имеющего радиальную скорость Vr, равную Vr=Fдλр/2.
За счет предложенного усовершенствованного способа устраняются основные недостатки прототипа, а именно: просмотр всей полосы частот от 150 МГц до 6 ГГц с шагом 10 МГц исключает пропуск возникающего при облучении БЛА резонанса, а переход в режим излучения сигналов на найденной резонансной частоте fp позволяет путем сравнения спектров убедиться в достоверности принимаемого при обнаружении решения.
Поясним сущность эффекта резонансного рассеяния. Имеется существенная разница между возникающим резонансным дифракционным полем и дифракционными полями квазиоптической и рэлеевской областей рассеяния. В высокочастотном приближении рассеянное электромагнитное поле состоит из следующих компонентов [6, с.21-30]: зеркальные отражения; поле на участках разрыва гладкой поверхности ВО (ребро, кромка крыла) и на участках разрыва производной функции, которая описывает поверхность рассеяния; рассеяние на границе «свет-тень», т.е. ползущие волны; бегущие волны, возникающие при наклонном падении ЭМВ на слабовыпуклые поверхности; отражения от вогнутых участков поверхности ВО.
Основными составляющими рассеянного поля в резонансной области являются зеркальные отражения, краевые волны и поверхностные волны. Существенную роль при этом играют также ползущие волны, вклад которых особенно возрастает на стыке рэлеевской и резонансной областей. При облучении сосредоточенных ВО с направлений, где зеркальное и краевое рассеяния слабы, в совокупное обратное рассеяние определяющий вклад вносят ползущие волны. Суммарное поле рассеяния при этом формируется в основном из дифрагированной ползущей ЭМВ и поля зеркально рассеянной ЭМВ. Диаграмма рассеяния в резонансной области слабо зависит от ракурса ВО по сравнению с квазиоптической областью, но также является многолепестковой [6].
Интенсивность отражения от каждого токопроводящего объекта зависит от его формы, размеров и длины волны зондирующего сигнала. На низких частотах (kL<<1) большинство объектов не отражает ЭМВ, а лишь преломляет их. При повышении частоты и переходе в резонансную область (kL≈1) ЭПР облучаемого объекта резко увеличивается [7, с.81-83]. При L≈λ/2 наблюдается максимизация величины ЭПР. Экспериментальные зависимости изменения ЭПР объекта (шара, конуса, стержня) от изменения произведения kL, приведенные в [7, рис.3.22-3.24], подтверждают вышесказанное. Иными словами, если объект размером около λ/2 облучается плоской ЭВМ, то он действует как параллельный контур с резонансом токов, в котором с изменением частоты происходит быстрое изменение фазового сдвига между током и напряжением. Такое быстрое изменение фазы наблюдается в металлических объектах только вблизи резонансных размеров.
При этом известно, что современные БЛА могут быть как с металлическим каркасом, так и полностью из композитных и пластичных материалов [9, 10]. Поэтому их эквивалентный поперечный радиолокационный размер, определяемый металлизированными элементами (плата управления, двигатель, крепление оптической линзы, антенна), может отличаться в десятки и более раз. Особенно трудно обнаруживать БЛА, если в его конструкции и оборудовании мало металлических частей и их размеры незначительны. В этом случае отраженные ЭМВ могут быть зафиксированы приемником РЛС только при определенных ракурсах и в условиях возникновения резонансного отражения. А поскольку истинный поперечный размер отражающего элемента БЛА неизвестен, то необходимо осуществлять поиск резонанса путем плавного или ступенчатого изменения частоты зондирования с шагом не более десятков МГц.
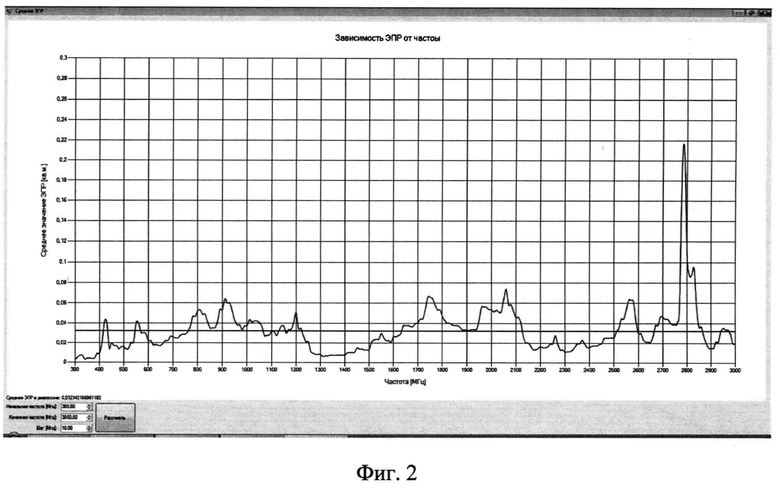
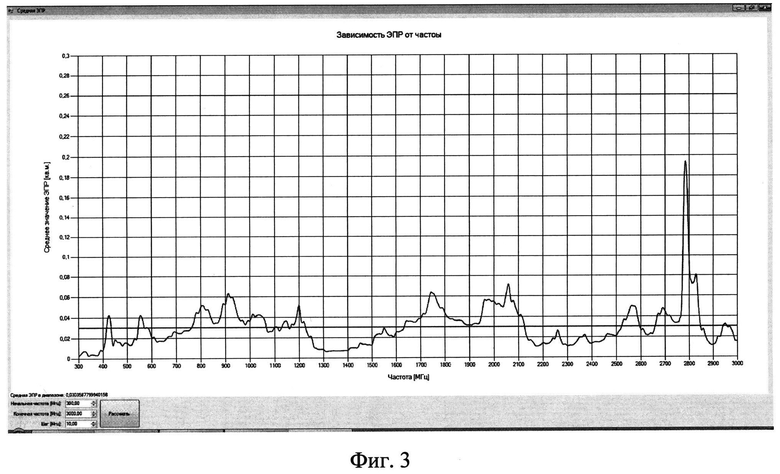
Для проверки работоспособности предложенного способа были организованы и проведены специальные эксперименты в условиях безэховой камеры. На радиопрозрачную платформу устанавливался исследуемый БЛА типа «Орлан-3» на атакующем ракурсе (нулевой курсовой угол). Использовалась миниатюрная РЛС с разнесенными приемной и передающей антеннами. В ходе эксперимента постепенно изменяли частоту излучения с шагом 10 МГц, а после приема отраженных сигналов и перевода их в цифровую форму фиксировали уровень принятого сигнала и строили график зависимости ЭПР от частоты. Частота изменялась от 300 МГц (λ=1 м) до 3 ГГц (λ=10 см). Опыт повторялся 3 раза. Результаты измерений ЭПР показаны на фиг.1-3. Из них видно, что при среднем значении ЭПР порядка σср≈0,03 м2 в условиях резонанса величина ЭПР достигает 0,16 м2, что в 5 с лишним раз превышает величину средней ЭПР σср. Резонанс наступает на частоте порядка 2780 МГц, что соответствует длине волны λр≈10,8 см. Это значит, что размер отражающего элемента конструкции БЛА «Орлан-3» на нулевом курсовом угле составляет примерно 5,4 см. Совпадение характеристик, сформированных в разных опытах, говорит о достоверности и устойчивости полученных экспериментальных результатов.
Таким образом, предлагаемый способ обнаружения малозаметных БЛА должен состоять из следующих последовательно выполняемых операций:
1. Последовательно формируют пачки радиоимпульсов длительностью τи с периодом повторения Tи, причем количество радиоимпульсов в каждой пачке равно N (для использования в дальнейшем быстрого преобразования Фурье число N целесообразно выбирать равным 2S, где S=8, 9, 10), несущую частоту радиоимпульсов первой пачки устанавливают равной 150 МГц (λ=2 м), а несущую частоту каждой последующей очередной пачки увеличивают на Δf=10 МГц, перестройку несущей частоты радиоимпульсов ведут до достижения ею величины 6 ГГц (λ=5 см).
2. Усиливают сформированные радиоимпульсы по мощности и последовательно излучают их в пространство с помощью антенной системы РЛС.
3. Последовательно принимают с помощью антенной системы РЛС отраженные сигналы, переводят их в цифровую форму с помощью аналого-цифрового преобразователя и записывают в оперативное запоминающее устройство (ОЗУ) амплитуды принятых отраженных сигналов каждого периода повторения, причем период дискретизации аналого-цифрового преобразования выбирают в 10-30 раз меньшим длительности зондирующего сигнала τи.
4. Разделяют всю совокупность записанных в ОЗУ оцифрованных отраженных сигналов в пределах каждого периода повторения на последовательные, соединяющиеся границами, но непересекающиеся и равные по длительности стробы дальности, нумеруют стробы дальности в пределах каждого периода повторения от 1 до M, причем длительность стробов выбирают равной длительности зондирующего радиоимпульса τи.
5. Детектируют все записанные отраженные сигналы с помощью цифрового фазового детектора для получения квадратурных составляющих отраженных сигналов, т.е. переводят принятые оцифрованные отраженные сигналы в комплексную форму.
6. В пределах каждого m-го строба дальности проводят согласованную обработку оцифрованных принятых сигналов путем свертки с оцифрованным комплексно-сопряженным зондирующим радиоимпульсом этого же периода повторения.
7. Определяют пик отклика отражений в каждом стробе дальности по критерию максимума его амплитуды и записывают в комплексном виде значения пиков откликов каждого m-го периода повторения каждой k-й пачки радиоимпульсов в ОЗУ.
8. Формируют для каждой k-й из К пачек радиоимпульсов цифровые массивы пиков откликов отражений одинаковых по номеру m стробов дальности и получают для каждой k-й пачки радиоимпульсов M массивов с N элементами в каждом массиве.
9. Проводят с элементами каждого массива пиков откликов операцию преобразования Фурье (быстрого преобразования Фурье) и получают в результате для каждого массива соответствующий спектральный массив, в котором формируется спектральный отклик ВО при реальном нахождении ВО в соответствующем стробе дальности (если в m-м стробе дальности находился ВО, то в соответствующем m-м спектральном массиве возникает его спектральная составляющая - спектральный отклик).
10. Сравнивают спектральные отклики отраженных сигналов в каждом спектральном массиве с заранее установленным пороговым значением (уровнем) и в случае превышения порога фиксируют в ОЗУ частоту соответствующего спектрального отклика m-го массива k-й пачки радиоимпульсов, которую принимают за доплеровскую частоту соответствующего ВО, и одновременно принимают решение об обнаружении на соответствующей дальности ВО.
11. В случае превышения порога спектральным откликом m-го массива по результатам анализа отражений всех пачек радиоимпульсов считают обнаруженный ВО обычным типовым ВО с ЭПР порядка единиц квадратных метров, а в случае превышения порога только на одной из частот зондирования (только в спектральном массиве одной отдельной пачки радиоимпульсов) изменяют дальнейший режим излучения на режим излучения аналогичных пачек с единой несущей резонансной частотой fp, равной несущей частоте пачки, по отражениям которой получено разовое (не повторяющееся для других пачек) превышение спектральным откликом порогового значения.
12. В строгом соответствии с описанными выше операциями формируют и анализируют спектральные массивы отражений для пачек радиоимпульсов, излученных на частоте fp, и в случае совпадения факта превышения порога в трех последовательно сформированных m-х массивах (совпадение по дальности), а также совпадения частот этих превысивших порог спектральных откликов принимают решение об обнаружении на соответствующей дальности малозаметного БЛА.
13. Радиальную скорость обнаруженного при анализе отражений k-й пачки радиоимпульсов ВО или малозаметного БЛА рассчитывают по доплеровской частоте Fд соответствующего спектрального отклика, превысившего порог, по формуле Vr=Fдλk/2, где λk - длина волны зондирующего сигнала в k-й пачке радиоимпульсов.
Как следует из описания и сущности способа, он действительно лишен недостатков, свойственных прототипу. Способ обеспечивает анализ всего диапазона частот, на которых современные БЛА отражают ЭМВ в резонансной области рассеяния. К тому же способ исключает принятие случайных, неподтвержденных решений об обнаружении БЛА. Способ можно рекомендовать для использования в перспективных РЛС поиска и обнаружения малозаметных ВО, в том числе в РЛС с цилиндрической или конформной фазированной антенной решеткой.
Источники информации
1. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967. Том 1. Основы радиолокации. 456 с.
2. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. - 560 с.
3. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Часть 1. Основы радиолокации. М.: Воениздат, 1983. - 456 с.
4. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М., Воениздат, 1967. 768 с.
5. Радиолокационная станция обнаружения целей 9С18М1. Техническое описание. Книга 1. Общие сведения. ЕФ 1.005.029 ТО, 1983. 152 с.
6. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. 236 с.
7. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. с.74-82 (прототип).
8. Радиоэлектронные системы. Справочник. Основы построения и теория / Под ред. Я.Д. Ширмана. М.: Радиотехника, 2007. 510 с.
9. Мосов С.П. Беспилотная разведывательная авиация стран мира: история создания, опыт боевого применения, современное состояние, перспективы развития. Монография. Киев: Изд. дом «Румб», 2008. 160 с.
10. Василии Н.Я. Беспилотные летательные аппараты. Минск: ООО «Попурри», 2003. 272 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
Изобретение относится к методам радиолокационного обнаружения воздушных объектов (ВО), в том числе беспилотных летательных аппаратов (БЛА). Достигаемый технический результат - просмотр всего диапазона частот (перебор всех значений длин волн, соизмеримых с размерами ВО и элементами их конструкции) и повышение точности обнаружения. Указанный результат достигается тем, что базовую начальную частоту зондирования предлагается выбрать равной 150 МГц, а перестройку вести до 6 ГГц. После анализа отражений на различных частотах и выявления факта возникновения превышающего порог спектрального отклика на одной из частот излучение переводится из режима с перестройкой частоты в одночастотный режим, соответствующий по частоте наличию спектрального отклика от малозаметного БЛА. После перехода на выявленную предполагаемую резонансную частоту fр результаты обнаружения малозаметного БЛА в соответствующем стробе дальности повторно проверяются. Проверяется соответствие доплеровской частоты Fд спектрального отклика в последовательно сформированных спектрах одного и того же строба дальности, а также факт превышения спектральным откликом установленного порога обнаружения. Если в трех подряд взятых спектрах спектральный отклик от БЛА превышает порог и его доплеровская частота Fд остается неизменной, то принимается решение об обнаружении в соответствующем стробе дальности малозаметного БЛА. 3 ил.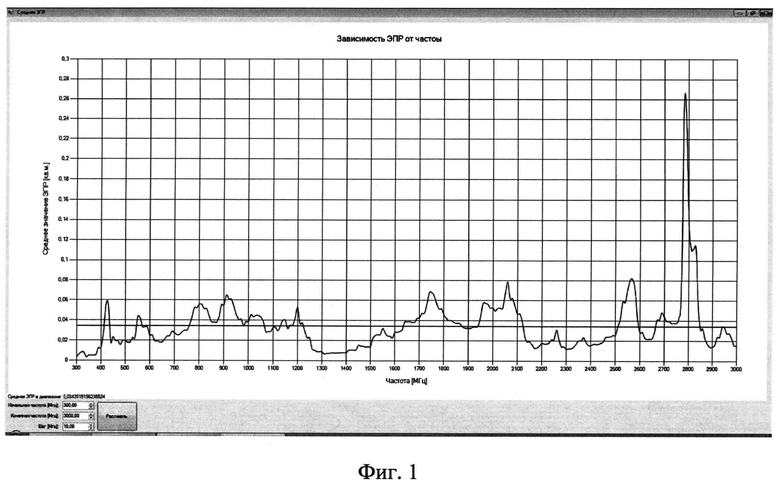
Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов, заключающийся в том, что формируют К пачек радиоимпульсов с одинаковым, равным N числом радиоимпульсов в каждой пачке, с одинаковой длительностью τи каждого радиоимпульса и одинаковым, равным Ти периодом повторения радиоимпульсов, причем каждая пачка радиоимпульсов имеет свою отличную от других несущую частоту, усиливают сформированные радиоимпульсы по мощности и последовательно излучают их в пространство с помощью антенной системы радиолокационной станции, последовательно принимают с помощью антенной системы радиолокационной станции отраженные сигналы, переводят их в цифровую форму с помощью аналого-цифрового преобразователя и записывают в оперативное запоминающее устройство амплитуды принятых отраженных сигналов каждого периода повторения, причем период дискретизации аналого-цифрового преобразования выбирают в 10-30 раз меньшим длительности зондирующего сигнала τи, разделяют всю совокупность записанных в оперативное запоминающее устройство оцифрованных отраженных сигналов в пределах каждого периода повторения на последовательные соединяющиеся своими границами, но непересекающиеся и равные по длительности стробы дальности, нумеруют стробы дальности в пределах каждого периода повторения от 1 до М, причем длительность стробов выбирают равной длительности зондирующего радиоимпульса τи, детектируют все записанные отраженные сигналы с помощью цифрового фазового детектора для получения квадратурных составляющих отраженных сигналов, т.е. переводят принятые оцифрованные отраженные сигналы в комплексную форму, в пределах каждого m-го строба дальности проводят согласованную обработку оцифрованных принятых сигналов путем свертки с оцифрованным комплексно-сопряженным зондирующим радиоимпульсом этого же периода повторения, определяют пик отклика отражений в каждом стробе дальности по критерию максимума его амплитуды и записывают в комплексном виде значения пиков откликов каждого m-го периода повторения каждой k-й пачки радиоимпульсов в оперативное запоминающее устройство, формируют для каждой k-й из К пачек радиоимпульсов цифровые массивы пиков откликов отражений одинаковых по номеру m стробов дальности и получают для каждой k-й пачки радиоимпульсов М массивов с N элементами в каждом массиве, проводят с элементами каждого массива пиков откликов операцию преобразования Фурье и получают в результате для каждого массива соответствующий спектральный массив, в котором формируется спектральный отклик воздушного объекта при реальном нахождении воздушного объекта в соответствующем стробе дальности, сравнивают спектральные отклики отраженных сигналов в каждом спектральном массиве с заранее установленным пороговым значением (уровнем) и в случае превышения порога фиксируют в оперативном запоминающем устройстве частоту соответствующего спектрального отклика m-го массива k-й пачки радиоимпульсов, которую принимают за доплеровскую частоту соответствующего воздушного объекта, и одновременно принимают решение об обнаружении воздушного объекта на соответствующей дальности, в случае превышения порога спектральным откликом m-го массива по результатам анализа отражений всех пачек радиоимпульсов считают обнаруженный воздушный объект обычным типовым воздушным объектом с эффективной площадью рассеяния порядка единиц квадратных метров, причем радиальную скорость обнаруженного при анализе отражений k-й пачки радиоимпульсов воздушного объекта рассчитывают по доплеровской частоте Fд соответствующего спектрального отклика, превысившего порог, по формуле Vr=Fдλk/2, где λk - длина волны зондирующего сигнала в k-й пачке радиоимпульсов,
отличающийся тем, что несущую частоту радиоимпульсов первой пачки устанавливают равной 150 МГц, а несущую частоту каждой последующей пачки увеличивают по отношению к частоте предыдущей пачки на 10 МГц, причем перестройку несущей частоты пачек радиоимпульсов проводят до достижения ею 6 ГГц, а также тем, что в случае превышения порога спектральным откликом m-го массива в результате анализа отражений только одной отдельной пачки радиоимпульсов, т.е. только на одной из частот зондирования, изменяют дальнейший режим излучения на режим излучения аналогичных пачек с единой несущей резонансной частотой fp, равной несущей частоте пачки, по отражениям которой получено разовое превышение спектральным откликом порогового значения, после обработки отраженных сигналов, принадлежащих дополнительно сформированным пачкам радиоимпульсов на несущей частоте fp, причем порядок обработки отраженных радиоимпульсов не изменяют, проверяют факт превышения в соответствующих им спектральных массивах полученными спектральными откликами установленного порогового значения и в случае совпадения номеров спектральных массивов, в которых обнаруживают превышение порогового уровня, трех последовательно принятых пачек отраженных на резонансной частоте fp радиоимпульсов, а также при совпадении частот этих превысивших порог спектральных откликов принимают окончательное решение об обнаружении на соответствующей дальности малозаметного беспилотного летательного аппарата.
| НЕБАБИН В.Г., СЕРГЕЕВ В.В | |||
| Методы и техника радиолокационного распознавания | |||
| Москва, Радио и связь, 1984, с.74-82 | |||
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| СПОСОБ РАСПОЗНАВАНИЯ УДАЛЕННЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2001 |
|
RU2206104C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2006 |
|
RU2324201C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| US 7012552 B2, 14.03.2006 | |||
| Устройство для измерения частоты пульса | 1990 |
|
SU1806596A1 |
| WO 2006133268 A2, 14.12.2006 | |||
| US 20070081723 A1, 12.04.2007 | |||

