Изобретение относится к технике измерений магнитного поля Земли и может быть использовано в бортовой аппаратуре подвижных и вращающихся носителей для измерения компонент геомагнитного поля на поверхности планеты и в космическом пространстве.
Решение задачи измерения компонент геомагнитного поля востребовано в системах спутниковой навигации, где принципиальное значение имеет получение информации об ориентации направления вектора геомагнитного поля относительно корпуса бортовых атомных часов. Конструктивно этот корпус выполнен в виде магнитного экрана, предназначенного для ослабления вариации внешнего геомагнитного поля в меру фактора экранирования. Неизбежные дефекты конструкции экранов (наличие швов и коммуникационных отверстий) не позволяют полностью исключить негативное влияние этих вариаций на стабильность атомных часов. Последнее связано с тем, что для существующих магнитных экранов характерно резкое различие поперечного и продольного (соответственно перпендикулярно и вдоль оси экрана) коэффициентов экранирования геомагнитного поля. Так, по данным работы [Donley E.A., Hodby E., Hollberg L., Kitching J. / / Rev. of Scientic Instr. 2007. V. 78, No. 8. Art. no. 083102. doi: doi:10.1063/1.2767533] отношение этих коэффициентов для малогабаритных рубидиевых атомных часов, объемом менее 3 см3, достигает величины 104. Таким образом, изменение направления геомагнитного поля относительно оптической оси атомных часов (например, в процессе движения спутника по орбите) автоматически должно приводить к вариациям магнитного поля внутри их экранной конструкции, а, следовательно, и к ориентационным измерительным погрешностям.
При наличии информации о параметрах магнитного экрана, а также определив величину и направление внешнего геомагнитного поля в зоне размещения атомных часов, их ориентационную погрешность можно минимизировать по сигналу магнитометра, установленного вблизи бортового стандарта частоты. Высокая однородность геомагнитного поля предполагает идентичность величины и направления этого поля в зонах размещения магнитометра и квантового стандарта частоты, что позволяет эффективно осуществлять подобную коррекцию. Для ее реализации необходимо использовать магнитометр без мертвых зон, способный измерять не только величину, но и компоненты геомагнитного поля на движущемся и вращающемся носителе.
В современных магнитометрах с оптической накачкой, в которых может быть реализован предлагаемый способ измерения компонент геомагнитного поля, измеряемым параметром является резонансная частота магнитометра, пропорциональная напряженности геомагнитного поля. В самогенерирующих аналогах на этой частоте наблюдается сигнал магнитометра, образованный прецессией спиновых моментов атомов рабочего вещества в магнитном поле. При этом для функционирования такого устройства его оптическая ось должна быть направлена под углом 45 градусов по отношению к вектору геомагнитного поля. В другом типе магнитометров с оптической накачкой, в которых оптическая ось совпадает с направлением геомагнитного поля, измеряемым параметром является частота внешнего радиочастотного генератора, который подстраивается под резонансную частоту специальной схемой его автоподстройки.
К аналогам заявляемого изобретения относятся способы измерения магнитного поля на основе самогенерирующих парощелочных устройств с оптической накачкой [Александров Е.Б. Современные радиооптические методы квантовой магнитометрии / Е.Б. Александров, А.К. Вершовский // УФН. - Том 179. - №6. - С. 605-637]. Подобные схемы содержат те же элементы, что и устройство, посредством которого реализуется заявляемый способ измерения как абсолютной величины магнитного поля, так и его компонент. В частности, в самогенерирующих схемах магнитометров используют магниточувствительный датчик, содержащий спектральную лампу накачки, колбу с парами щелочного металла, поляризационный фильтр, катушки, генерирующие радиочастотное магнитное поле, и фотодиод. С помощью усилителя обратной связи в таких схемах возбуждаются колебания на частоте магнитного резонанса, однозначно связанной с напряженностью внешнего магнитного поля и его вариациями. Недостатком аналогов является неспособность определения компонент измеряемого магнитного поля, а также низкая точность из-за наличия мертвых зон, обусловленных зависимостью амплитуды сигнала магнитометра от угла θ между измеряемым полем и оптической осью магнитометра по закону (sin θ cos θ)2. В соответствии с указанной зависимостью амплитуда сигнала магнитометра уменьшается до нуля при стремлении угла θ к нулю и 90°.
К аналогам заявляемого изобретения относится полезная модель, направленная на обеспечение высокой точности измерений за счет уменьшения ориентационной погрешности измерений магнитного поля на основе MZ-магнитометра, в котором используется дополнительное магнитное поле высокой напряженности [Семенов В.В., Ермак С.В. Квантовый MZ-магнитометр, полезная модель, патент RU №140875, опубл. 20.05.2014, Бюлл. №14]. Квантовый MZ-магнитометр содержит два радиочастотных генератора со схемами их автоподстройки, а также оптический тракт, включающий расположенные на одной оси источник циркулярно поляризованного излучения накачки, камеру поглощения с атомами щелочного металла, и фотодетектор, подключенный к схемам автоподстройки радиочастотных генераторов. Магнитометр также содержит размещенный вдоль оптической оси соленоид, в котором создается искусственное магнитное поле высокой напряженности, обеспечивающее разрешение низкочастотного спектра поглощения радиооптического резонанса.
Недостатком аналога является обеспечение недостаточно высокой стабильности дополнительного магнитного поля для минимизации измерительной погрешности магнитометра в условиях случайных вариаций тока в соленоиде. В случае использования атомов цезия напряженность рабочего магнитного поля соленоида должна составлять не менее 30 Э для обеспечения надежного разрешения радиочастотного спектра поглощения. В линейном приближении зависимости резонансной частоты от магнитного поля для контроля геомагнитного поля на поверхности планеты с относительной погрешностью 1% в аналоге требуется обеспечивать относительную стабильность поля соленоида на уровне 10-4, а на орбите спутника - на уровне 10-5. Другим существенным недостатком аналога в случае его использования в аппаратуре спутника для контроля геомагнитного поля в космосе является неизбежное влияние поля соленоида на функционирование бортовых атомных часов, размещенных вблизи магнитометра (мощное магнитное поле соленоида может привести к намагничиванию магнитного экрана атомных часов и нарушению режима их работы).
Аналогом заявляемого изобретения, взятым за прототип, является способ измерения магнитного поля на основе MZ-магнитометра с оптической накачкой [Померанцев Н.М., Рыжков В.М., Скроцкий Г.В. Физические основы квантовой магнитометрии. - М.: Из-во Наука, 1972, стр. 384], содержащего радиочастотный генератор со схемой автоподстройки, оптический тракт, включающий расположенные на одной оси источник циркулярно поляризованного излучения накачки, камеру поглощения с атомами щелочного металла, охваченную радиочастотной катушкой, и фотодетектор.
В способе измерения магнитного поля, используемом в прототипе, измеряемым параметром является частота радиочастотного генератора, который управляется сигналом ошибки, поступающим на вход радиочастотного генератора. Если частота радиочастотного генератора равна резонансной частоте, определяемой напряженностью геомагнитного поля, сигнал ошибки равен нулю. При изменении напряженности магнитного поля на выходе схемы автоподстройки появляется напряжение сигнала ошибки, знак которого зависит от знака приращения напряженности геомагнитного поля. При этом напряжение сигнала ошибки автоматически компенсирует соответствующее приращение частоты радиочастотного генератора, осуществляя его настройку на резонансное значение, которое измеряется частотомером.
Недостатком прототипа является наличие мертвых зон, обусловленное зависимостью амплитуды сигнала магнитометра от угла θ между измеряемым полем и оптической осью по закону (cosθ)4. Другим существенным недостатком магнитометра, реализующего прототип способа измерения магнитного поля, является неспособность магнитометра определять направление магнитного поля относительно окружающей бортовой аппаратуры подвижного носителя.
Технической задачей заявляемого способа является расширение функциональных возможностей MZ-магнитометра и обеспечение более точного измерения магнитометром с оптической накачкой абсолютной величины напряженности геомагнитного поля и его компонент на подвижных и вращающихся носителях вне зависимости от ориентации носителя относительно вектора измеряемого поля, в том числе в случае перпендикулярной ориентации вектора геомагнитного поля к оптической оси магнитометра.
Решение этой задачи в заявляемом изобретении достигается тем, что в предлагаемом способе измерения геомагнитного поля на движущихся и вращающихся носителях, основанном на измерении резонансной частоты MZ-магнитометра с оптической накачкой, в условиях изменения направления и величины напряженности геомагнитного поля в функции времени t, заключающийся в том, что измерение напряженности геомагнитного поля и его компонент осуществляется следующим образом:
вдоль оптической оси 0Z MZ-магнитометра в момент времени t создается первое дополнительное магнитное поле Нд1, и по резонансной частоте ω1 измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t);
далее вдоль оптической оси 0Z MZ-магнитометра в момент времени (t+Δt), где Δt - длительность измерений частоты магнитометра, создается второе дополнительное магнитное поле Нд2, и по резонансной частоте ω2 измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t+Δt);
далее по известным значениям ω1, Нд1, ω2, и Нд2, определяются напряженность геомагнитного поля Н(t+Δt) ≈ Н(t), а также его компоненты HZ(t+Δt) ≈ HZ(t) и HXY(t+Δt) ≈ HXY(t);
далее вдоль оси 0Х (либо 0У) в момент времени t+2Δt создается третье постоянное дополнительное магнитное поле Нд3, которое компенсирует поперечную компоненту измеряемого геомагнитного поля HX(t+2Δt) ≈ HX(t), либо HY(t+2Δt) ≈ HY(t), и соответствует величине этой компоненты.
Техническим результатом при реализации предлагаемого способа является улучшение точности измерения напряженности геомагнитного поля и расширение функциональных возможностей, предусматривающих измерение его компонент, осуществляемого MZ-магнитометром с оптической накачкой в условиях изменения магнитного поля относительно движущегося и вращающегося носителя, за счет устранения мертвых зон путем введения дополнительного магнитного поля.
Сущность предлагаемого способа измерения геомагнитного поля поясняется графическим материалом на фиг. 1, фиг. 2 и фиг. 3.
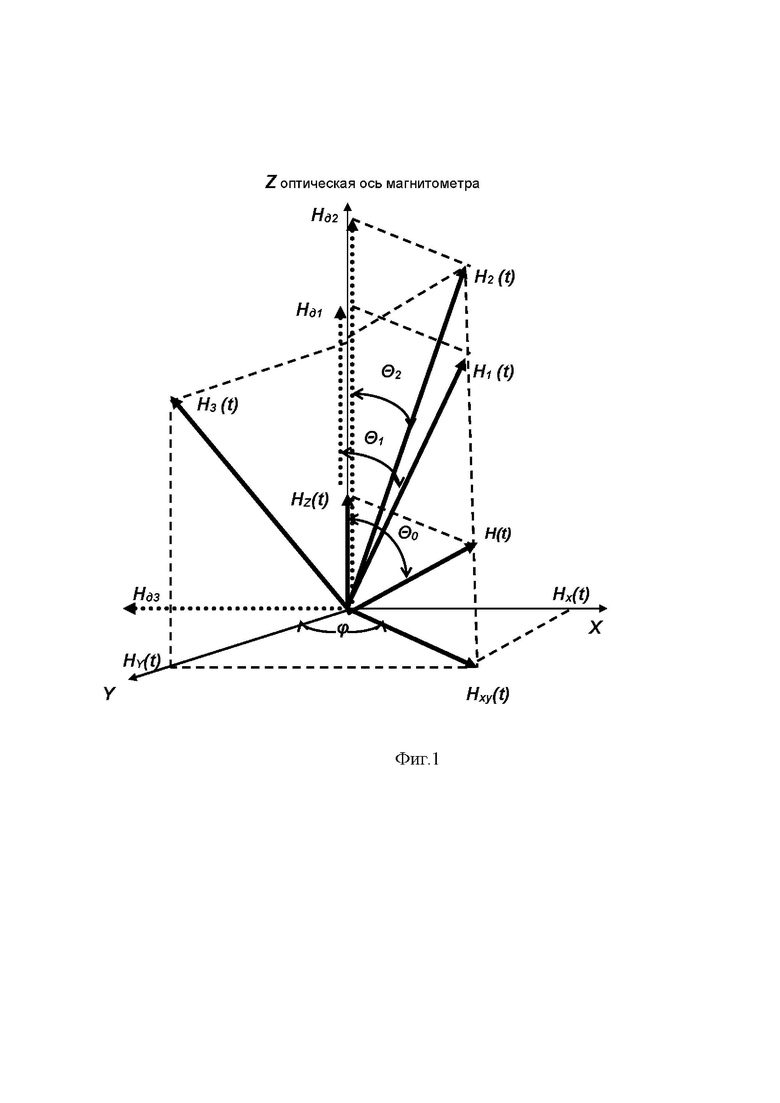
На фиг. 1 изображена схема векторов магнитного поля в декартовой системе координат XYZ. В схеме векторов магнитных полей на фиг. 1 использованы следующие обозначения:
HX(t) , HY(t), HZ(t) - компоненты измеряемого магнитного поля Н(t) в декартовой системе координат XYZ;
Нху(t) - поперечная компонента измеряемого магнитного поля Н(t) в сферической системе координат.
Нд1 - первое дополнительное магнитное поле;
Нд2 - второе дополнительное магнитное поле;
Нд3 - третье дополнительное магнитное поле;
Н1(t) - суммарный вектор напряженности, образованный вектором измеряемого магнитного поля Н(t) и вектором первого дополнительного магнитного поля Нд1;
Н2(t) - суммарный вектор напряженности, образованный вектором измеряемого магнитного поля Н(t) и вектором второго дополнительного магнитного поля Нд2;
Н3(t) - суммарный вектор напряженности, образованный вектором второго дополнительного магнитного поля Нд2 и компонентой HY(t) измеряемого магнитного поля Н(t);
Θ0 , Θ1, Θ2 - углы между оптической осью магнитометра и векторами и Н(t), Н1(t) и Н2(t);
ϕ - азимутальный угол вектора измеряемого магнитного поля Н(t).
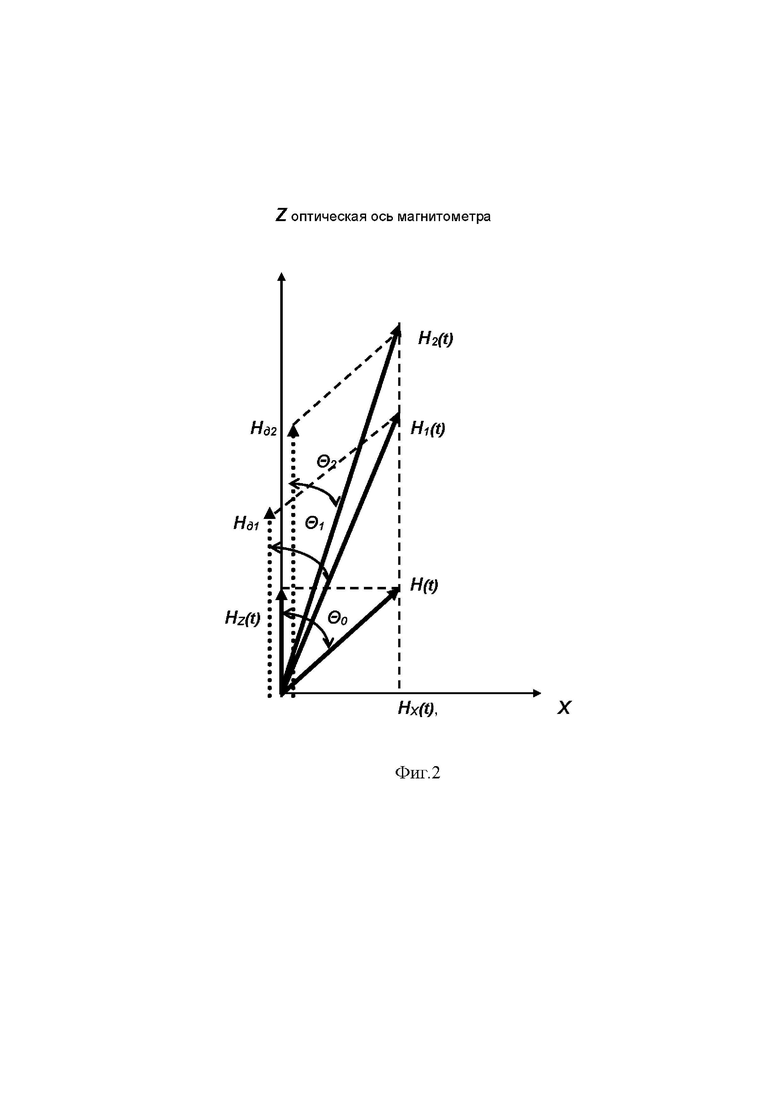
На фиг. 2. изображена схема векторов магнитного поля в плоскости XZ. В схеме векторов магнитных полей на фиг. 2 использованы следующие обозначения:
НХ(t) , HZ(t) - компоненты измеряемого магнитного поля Н(t),
Нд1 - первое дополнительное магнитное поле;
Нд2 - второе дополнительное магнитное поле;
Н1(t) - суммарный вектор напряженности, образованный вектором измеряемого магнитного поля Н(t) и вектором первого дополнительного магнитного поля Нд1;
Н2(t) - суммарный вектор напряженности, образованный вектором измеряемого магнитного поля Н(t) и вектором второго дополнительного магнитного поля Нд2;
Θ0 , Θ1, Θ2 - углы между оптической осью магнитометра и векторами Н(t), Н1(t) и Н2(t).
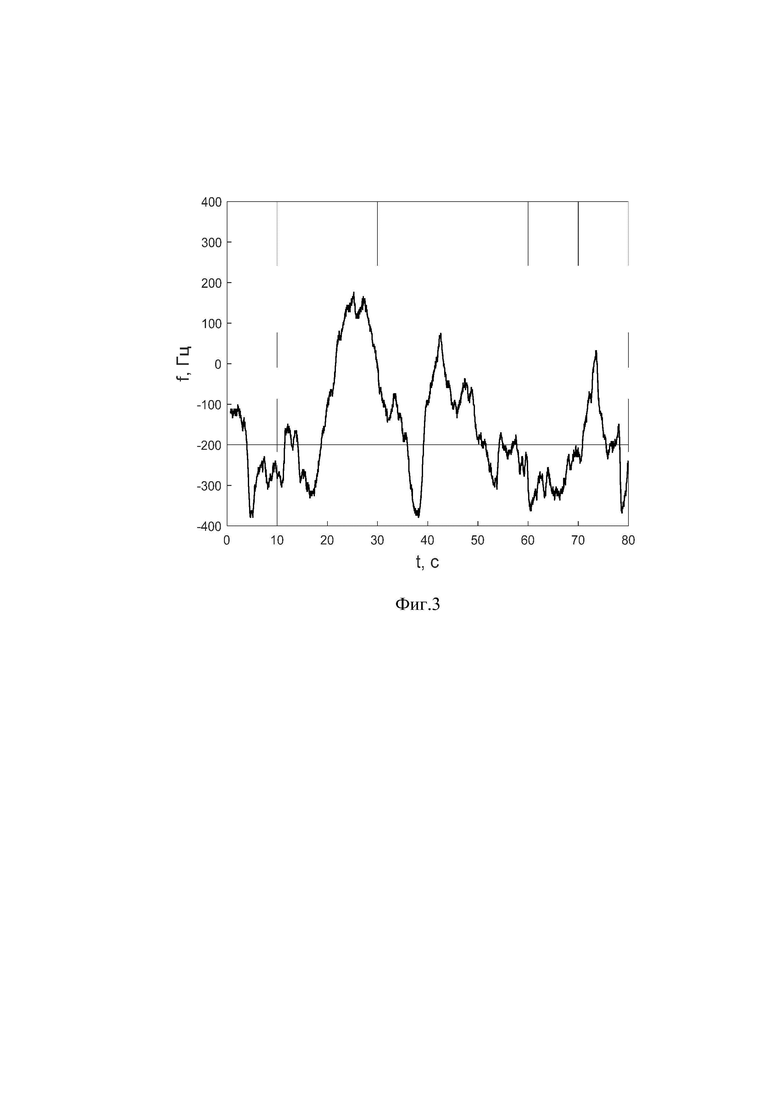
На фиг. 3 представлена осциллограмма экспериментальной записи вариаций f резонансной частоты макета MZ-магнитометра, вызванные вариациями лабораторного магнитного поля во времени.
В соответствии с заявленным способом измерения геомагнитного поля введение дополнительных магнитных полей Нд1, Нд2 и Нд3 позволяет обеспечить работоспособность MZ-магнитометра независимо от направления измеряемого геомагнитного поля на подвижном носителе.
В процессе движения носителя, на котором установлен MZ-магнитометр, величина и направление геомагнитного поля изменяются, и в момент времени t вектор геомагнитного поля ориентируется под углом Θ0 по отношению к оптической оси магнитометра, как это показано на фиг. 1.
Далее, согласно формуле изобретения, в этот же момент времени t вдоль оси 0Z создается первое дополнительное магнитное поле Нд1, напряженность которого выбирается таким образом, чтобы при любой ориентации геомагнитного поля в системе координат XYZ наблюдался сигнал магнитометра, обеспечивающий достаточно высокое значение отношения сигнал-шум, то есть исключались бы мертвые зоны его работы. Конкретное значение напряженности дополнительного магнитного поля Нд1 устанавливается из требований наблюдения надежного сигнала магнитометра в условиях наибольшего отклонения от оптической оси суммарного вектора напряженности магнитного поля Н1(t).
Так, например, в измерениях геомагнитного поля на поверхности планеты, средняя напряженность которого составляет порядок величины 0,5 Э, напряженность дополнительного магнитного поля Нд1 должна превышать эту величину, чтобы наблюдать сигнал магнитометра даже в случае перпендикулярной ориентации вектора геомагнитного поля к оптической оси. В этой ситуации с учетом отмеченной выше ориентационной зависимости амплитуды сигнала MZ-магнитометра включение дополнительного магнитного поля Нд1 напряженностью 0,76 Э позволяет наблюдать сигнал MZ-магнитометра с амплитудой, составляющей 50% от ее максимального значения, что не является критичным в условиях вариаций величины и направления геомагнитного поля. Подобные вариации, вызванные, например, солнечной активностью, являются основным источником погрешностей магнитометра. В качестве примера на фиг. 3 приведены экспериментальные записи вариаций f резонансной частоты макета.
MZ-магнитометра, вызванные вариациями лабораторного магнитного поля во времени, полученные на оптически ориентированных атомах цезия с резонансной частотой 175 кГц, (резонансная частота MZ-магнитометра в геомагнитном поле на поверхности планеты). Из осциллограммы на фиг. 3 следует, что вариация f резонансной частоты MZ-магнитометра в условиях нестабильности лабораторного магнитного поля наблюдается на уровне 0,2%, что существенно превышает уровень погрешностей, вызванных шумовым напряжением при регистрации амплитуд сигналов магнитометра. На орбите спутников навигационных систем (в магнитных полях порядка 0,05 Э) при вариациях геомагнитного поля, показанных на фиг. 3, относительный уровень вариаций резонансной частоты может превышать уровень 2%. В лучших образцах MZ-магнитометров на парах щелочных металлов удается реализовать отношение сигнал-шум в полосе регистрации 0,01 Гц на уровне 106, что позволяет измерять амплитуду сигнала магнитометра, а, следовательно, и его резонансную частоту, с относительной погрешностью на порядок меньшую указанной выше (то есть на уровне 0,02%). Отметим, что для реализации этой погрешности при измерении геомагнитного поля на орбите спутника (~ 0,05 Э) в аналоге [Семенов В.В., Ермак С.В. Квантовый MZ-магнитометр, полезная модель, патент RU № 140875, опубл. 20.05.2014, Бюл. №14] при величине напряженности магнитного поля соленоида ~ 30 Э, требуется обеспечить относительную стабильность тока соленоида на уровне 3⋅10-7, что на порядки выше паспортной относительной стабильности существующих промышленных источников тока.
Естественные вариации геомагнитного поля, вызванные солнечной активностью, обуславливают снижение требований к стабильности источников тока, создающих дополнительное магнитное поле с помощью соленоидов. Так, например, как указывалось выше в аналоге, для контроля геомагнитного поля на орбите спутника с относительной погрешностью 1% требуется обеспечивать относительную стабильность источника тока на уровне 10-5. В предлагаемом способе благодаря относительно невысокой напряженности дополнительного магнитного поля (на уровне 0,1 Э) удается реализовать указанную выше относительную погрешность измерений 1% при гораздо меньших (более чем на два порядка) относительных стабильностях источников тока, что позволяет использовать ординарные приборы подобного рода, не требующие специальных мер стабилизации параметров.
В соответствии с формулой изобретения, вдоль оптической оси 0Z MZ-магнитометра в момент времени (t+Δt), где Δt - длительность измерений частоты магнитометра, создается второе дополнительное магнитное поле Нд2, и по резонансной частоте ω2 измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t+Δt). При этом предполагается, что выполняется равенство Н(t+Δt) ≈ Н(t) с погрешностью, определяемой изменением ориентации геомагнитного поля за время измерения Δt.
Для оценки влияния промежутка времени Δt на точность измерения геомагнитного поля и угла Θ0 целесообразно оценить изменение направления геомагнитного поля за время Δt. В качестве примера рассмотрим вариант движения спутника ГЛОНАСС с периодом движения по круговой траектории Т ≈ 12 часов и длительности Δt ≈ 5 секунд. Предположим, что в начальный момент времени оптическая ось магнитометра параллельна оптической оси атомных часов и ориентирована вдоль направления внешнего геомагнитного поля. Этим начальным условиям соответствует максимальное влияние вариаций геомагнитного поля на стабильность частоты бортовых атомных часов. За половину периода обращения спутника 6 часов направление вектора измеряемого геомагнитного поля изменяется на 180°, что предполагает изменение угла Θ0 на величину, равную 0,04°. Синус угла 0,04° примерно равен 0,0007, что эквивалентно изменению продольной компоненты геомагнитного поля 0,05 Э (на орбите навигационного спутника) за это время на величину 0,000035 Э. Их этих оценок следует, что относительная погрешность измерения геомагнитного поля за время измерений 5 секунд составляет менее 0,1%, что существенно меньше указанной выше измерительная погрешности, обусловленной вариациями геомагнитного поля (~2%) на орбите спутника.
Приведенные оценки позволяют сделать вывод, что при введении дополнительных магнитных полей Нд1 и Нд2 равенства Н(t+Δt) ≈ Н(t) и Н(t+2Δt) ≈ Н(t) будут соблюдаться с погрешностью, на порядок меньшей реальной погрешности, обусловленной естественными и искусственными вариациями геомагнитного поля.
Таким образом, согласно формуле изобретения, в момент времени t осуществляется измерение резонансных частот ω1 и ω2, которые в соответствии с фиг. 1 равны:
ω12(t ) = ω2(t) + ωд12 + 2ω(t)ωд1 cosΘ0 (1);
ω22(t ) = ω2(t) + ωд22 + 2ω(t)ωд2 cosΘ0 (2),
где ω(t) = Н(t), ω1(t) = Н1(t), ω2(t) =Н2(t), ωд1 =Нд1, ωд2 =Нд2,
Н(t), ω1(t) = Н1(t), ω2(t) =Н2(t), ωд1 =Нд1, ωд2 =Нд2,
- гиромагнитное отношение атомов рабочего вещества магнитометра.
Из системы уравнений (1) и (2) определяется абсолютное значение напряженности геомагнитного поля Н(t) и косинус угла Θ0 в виде:
Н2(t
) =  [ωд2(ω12(t) - ωд12)-ωд1(ω22(t) - ωд22)]/(ωд2 - ωд1) (3);
[ωд2(ω12(t) - ωд12)-ωд1(ω22(t) - ωд22)]/(ωд2 - ωд1) (3);
cosΘ0 ≈ [ω12(t) - ω2(t) - ωд12 ]/2ω(t)ωд1 (4);
cosΘ0 ≈ [ω22(t) - ω2(t) - ωд22 ]/2ω(t)ωд2 (5).
Косинус угла Θ0 определятся как средневзвешенное значение из выражений (4) и (5), определенное с учетом погрешности измерений резонансных частот ω1 и ω2.
Далее, согласно формуле изобретения вдоль оси 0Х (либо 0У) в момент времени t+2Δt создается третье постоянное дополнительное магнитное поле Нд3, которое компенсирует поперечную компоненту измеряемого геомагнитного поля HX(t+2Δt) ≈ HX(t), либо HY(t+2Δt) ≈ HY(t), и соответствует величине этой компоненты.
Для проверки работоспособности предложенного способа измерения геомагнитного поля и его компонент, а также для оценки измерительной погрешности, авторами заявки был осуществлен эксперимент с макетом квантового MZ-магнитометра на парах цезия, оптическая ось которого ориентировалась в плоскости XZ лабораторного магнитного поля, как показано на фиг. 2. При этом оптический тракт магнитометра размещался в центре трех пар колец Гельмгольца, предназначенных для создания дополнительных магнитных полей фиксированной напряженности.
На начальном этапе эксперимента при отключенных кольцах Гельмгольца фиксировалась резонансная частота магнитометра, определяемая лабораторным магнитным полем, а также вариации этого поля, обусловленные промышленными наводками и флуктуациями геомагнитного поля. Пример записи этих вариаций (выраженных в единицах частоты) для наших экспериментальных условий показан на фиг. 3, из которой следует, что за период времени регистрации вариаций их максимальная амплитуда колеблется в пределах от несколько десятков до нескольких сотен герц на временном интервале порядка 10 секунд на фоне средневзвешенной резонансной частоты магнитометра (166 кГц).
Согласно фиг. 2, составляющая магнитного поля HZ(t) при этом измерялась по резонансной частоте MZ-магнитометра в условиях компенсации составляющей HY(t) с помощью катушек Гельмгольца. В единицах частоты компонента HZ(t) лабораторного магнитного поля составляла ~ 53 кГц с погрешностью, определяемой указанными выше вариациями магнитного поля. Полученные данные соответствуют относительной погрешности измерений магнитного поля и его компонент в пределах от 0,02% до 0,2%, с которой следует сопоставить измерительную погрешность предлагаемого способа. С этой целью, в соответствии с предлагаемым способом, с помощью колец Гельмгольца создавались различные дополнительные магнитные поля Нд1 и Нд2 в пределах от 0,5 Э до 2 Э и измерялись резонансные частоты MZ-магнитометра ω1 и ω2.
Далее проводилось усреднение данных, полученных при вычислении абсолютной величины полного вектора лабораторного поля H(t) и компоненты HZ(t) в соответствии с фиг. 2 и рассчитывалась относительная погрешность предлагаемого способа измерений магнитного поля. Для наших экспериментальных условий погрешность определения напряженности лабораторного поля и компоненты HZ(t) не превышала 0,1%, то есть по порядку величины соответствовала относительной погрешности измерений, обусловленной нестабильностью измеряемого магнитного поля.
Приведенные численные данные измерительной погрешности подтверждают работоспособность и полезность предлагаемого способа измерений магнитного поля и его компонент в условиях вариаций величины и направления этого поля на борту подвижных носителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения координат магнитного диполя | 2023 |
|
RU2815766C1 |
| Способ компенсации вариаций частоты радиоспектроскопа | 2022 |
|
RU2796608C1 |
| Квантовый стандарт частоты | 2021 |
|
RU2787275C1 |
| Способ уменьшения вариаций частоты атомных часов | 2024 |
|
RU2827653C1 |
| КВАНТОВЫЙ СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЁННОСТИ, НАПРАВЛЕНИЯ, ГРАДИЕНТА МАГНИТНОГО ПОЛЯ ЗЕМЛИ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2017 |
|
RU2680629C2 |
| Квантовый стандарт частоты | 2022 |
|
RU2792293C1 |
| Способ измерения компонент магнитного поля | 2020 |
|
RU2737726C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
Изобретение относится к области измерения геомагнитного поля. Технический результат – повышение точности измерений абсолютной величины напряженности геомагнитного поля и его компонент на подвижных и вращающихся носителях. Технический результат достигается с помощью измерения компонент геомагнитного поля MZ-магнитометром с оптической накачкой в условиях изменения магнитного поля относительно движущегося и вращающегося носителя за счет устранения мертвых зон путем введения дополнительного магнитного поля. 3 з.п. ф-лы, 3 ил.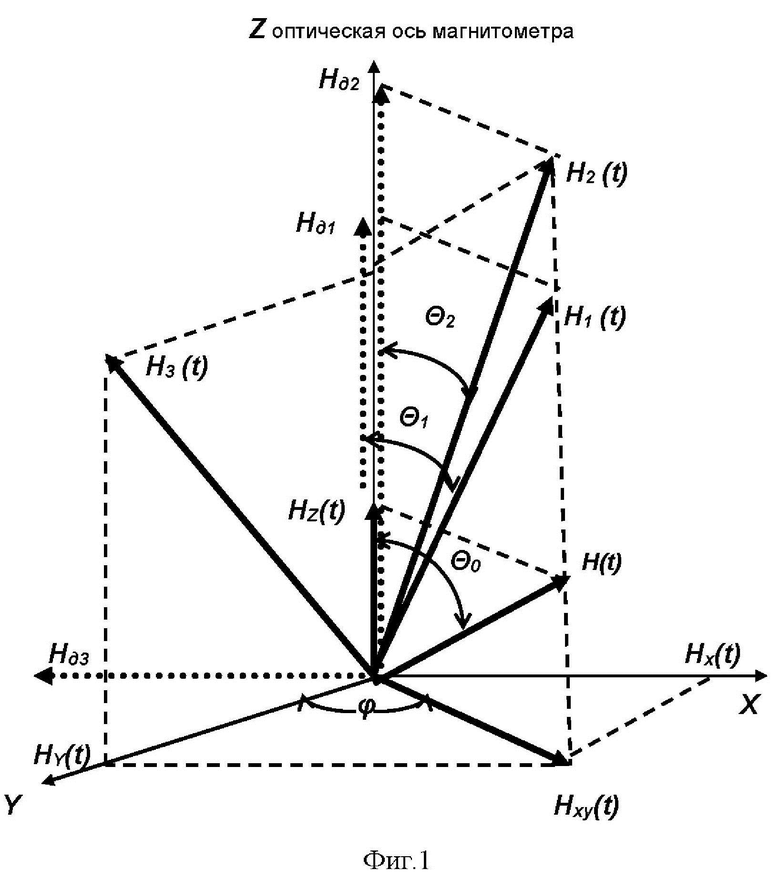
1. Способ измерения геомагнитного поля на движущихся и вращающихся носителях, основанный на измерении резонансной частоты МZ-магнитометра с оптической накачкой, в условиях изменения направления и величины напряженности геомагнитного поля в функции времени t, отличающийся тем, что последовательность измерений осуществляется следующим образом:
- вдоль оптической оси 0Z МZ-магнитометра в момент времени t создается первое дополнительное магнитное поле Нд1, и по резонансной частоте  измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t);
измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t);
- далее вдоль оптической оси 0Z МZ-магнитометра в момент времени (t+Δt), где Δt - длительность измерений частоты магнитометра, создается второе дополнительное магнитное поле Нд2, и по резонансной частоте  измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t+Δt);
измеряется напряженность суммарного магнитного поля, образованного геометрической суммой векторов Нд1 и Н(t+Δt);
- далее по известным значениям , Нд1, и Нд2 определяются напряженность геомагнитного поля Н(t+Δt) ≈ Н(t), а также его компоненты НZ(t+Δt) ≈ НZ(t) и НXY(t+Δt) ≈ НXY(t);
- далее вдоль оси 0Х (либо 0У) в момент времени t+2Δt создается третье постоянное дополнительное магнитное поле Нд3, которое компенсирует поперечную компоненту измеряемого геомагнитного поля НX(t+2Δt) ≈ НX(t), либо НY(t+2∆t) ≈ НY(t), и соответствует величине этой компоненты.
2. Способ по п.1, согласно которому напряженности магнитных полей Нд1 и Нд2 превышают напряженность измеряемого геомагнитного поля.
3. Способ по п.1, согласно которому напряженности дополнительных магнитных полей Нд1 и Нд2 устанавливаются в пределах значений от 0,1 Э до 2 Э.
4. Способ по п.1, согласно которому дополнительное магнитное поле создается с помощью колец Гельмгольца.
| Ротор синхронной машины | 1960 |
|
SU140875A1 |
| Устройство для автоматического выключения водомерных стекол в случае их поломки | 1928 |
|
SU11901A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1980 |
|
SU854155A1 |

