Предлагаемое изобретение относится к машиностроению, а именно к стендовым испытаниям тяжелонагруженных электроприводов запорной арматуры трубопроводов.
Из уровня техники известен стенд испытательный производства НПП «ТЭК» (интернет-ресурс: http://www.npptec.ru/).
Стенд испытательный предназначен для проведения испытаний электроприводов, электродвигателей, электрогенераторов, мотор-редукторов, а также пневмо- и гидромоторов, двигателей внутреннего сгорания, пневмо- и гидроприводов мощностью от 90 Вт до 60 кВт при серийном производстве или входном контроле.
Технические возможности стенда:
- регулирование тормозных нагрузок;
- формирование трехфазного питающего напряжения в диапазоне от минус 50 до плюс 47% от номинального сетевого напряжения;
- формирование провалов напряжения;
- измерение токов и напряжений в цепях электродвигателя, электропривода, электромашинного генератора;
- изменение частоты питающего напряжения от 40 до 60 Гц;
- возможность изменения чередования фаз выходного питающего напряжения;
- защита от перегрузок по току и коротких замыканий в нагрузке;
- формирование высоковольтных импульсных помех до 4 кВ;
- возможность автоматизации проведения испытаний;
- осуществление обмена информацией с персональным компьютером по интерфейсу USB.
К недостаткам известного технического решения относится:
- ограничение крутящего момента испытуемого привода до 10000 Нм;
- невозможность полной имитации работы трубопроводной арматуры в части работы в режимах «пуск на упор», «наезд на упор»;
- невозможность имитации аварийных ситуаций по электропитанию привода:
а) межфазное короткое замыкание электродвигателя испытуемого привода;
б) однофазное короткое замыкание обмотки испытуемого электродвигателя на корпус;
в) работа на 2-х фазах (обрыв фазы питающего напряжения);
г) формирование кратковременных отключений электропитания испытуемого электропривода;
д) формирование несинусоидальности питающего напряжения испытуемого электропривода;
- для проведения калибровки измерителя крутящего момента, входящего в состав стенда, необходим его демонтаж.
Из уровня техники известно устройство передачи крутящего момента, которое относится к стенду для испытания тяжелонагруженных механизмов: электроприводов, агрегатов, машин и других механизмов с максимальным крутящим моментом до 4000 кгс-м (до 39227 Нм) (патент РФ №2475666 от 20.02.2013, МПК: F16H 47/00, G01M 13/02), выбранное за наиболее близкий аналог (прототип).
Устройство передачи крутящего момента содержит входной и выходной валы, механизм загрузки крутящим моментом с узлом исполнительного механизма и блоки управления, при этом оно включает гидравлическую систему, блок автоматического управления гидравлической системой, электрически связанной с ним, а также измеритель крутящего момента, механизм загрузки крутящим моментом включает узел зубчатой передачи и редуктор, который включает полый промежуточный ведомый вал, внутри которого соосно размещен входной вал, через зубчатую передачу связанный с выходным валом, который размещен параллельно указанному ведомому валу на заданном расстоянии от него, узел исполнительного механизма выполнен в виде двух модулей - модуля загрузки крутящим моментом и модуля снятия загрузки крутящим моментом, которые включают обгонные кулачковые муфты зацепления, приводимые в движение гидравлической системой и отключаемые возвратными пружинами в момент прекращения действия гидравлической системы, узел зубчатой передачи включает два соединенных между собой зубчатых колеса с наружным зубчатым венцом, отличающиеся числом зубьев не менее чем на единицу и сопряженные с двумя соответствующими зубчатыми колесами с внутренними зубчатыми венцами, при этом одно указанное зубчатое колесо с большим количеством зубьев через шлицевое сопряжение связано с полым промежуточным ведомым валом, а второе указанное зубчатое колесо жестко связано с входным валом, а зубчатые колеса узла зубчатой передачи с наружными зубчатыми венцами размещены на подшипниковых опорах, установленных на эксцентриковой детали, которая размещена на валу узла зубчатой передачи и связана с ним шпонкой, при этом ось эксцентриковой детали смещена относительно оси вала узла зубчатой передачи на заданное расстояние, на валу узла зубчатой передачи противоположно относительно оси эксцентриковой детали закреплены балансировочные грузы, при этом на валу узла зубчатой передачи установлены два зубчатых колеса, одно из которых связано с зубчатым колесом модуля загрузки крутящим моментом, а другое - с зубчатым колесом модуля снятия загрузки крутящим моментом, при этом узел зубчатой передачи выполнен с возможностью свободного вращения с одинаковой частотой вместе с входным и ведомым валами на холостом ходу и создания крутящего момента заданной величины, удержания его, многократного увеличения и снятия до нулевого значения.
Описанная конструкция позволяет испытывать электроприводы с максимальным крутящим моментом до 4000 кгс⋅м (до 39227 Н⋅м), управляемые как электромеханическим блоком управления со встроенными концевыми выключателями, электронным блоком управления, работающим по программе.
Цилиндрический редуктор данного устройства патенту РФ №2475666 будет иметь большие габариты для испытания тяжелонагруженных электроприводов с еще более высоким максимальным крутящим моментом (например, 65000 Н⋅м или 180000 Н⋅м и более), а гидравлическая система совместно с этим редуктором обеспечивает только один режим увеличения нагрузки: «плавный процесс нарастания крутящего момента в кинематической цепи».
Технической задачей изобретения является создание стенда, позволяющего расширить типоразмерный ряд испытуемых электроприводов с увеличением их максимального крутящего момента, с возможностью имитации на стенде реальных условий работы запорной арматуры с различными временами нарастания нагрузок.
Технический результат заключается в повышении эффективности работы стенда за счет расширения его функциональных возможностей.
Техническая задача решается, а указанный технический результат достигается за счет того, что стенд для испытания электроприводов, включающих электродвигатель, редуктор и блок управления, содержит нагрузочный привод, выходное звено которого выполнено с возможностью кинематического соединения с выходным звеном испытуемого электропривода и снабжено датчиком крутящего момента, и соединенную с нагрузочным приводом систему автоматического управления, выполненную с возможностью управления оператором и имеющую вход и выход, вход системы автоматического управления соединен с датчиком крутящего момента, при этом выходное звено нагрузочного привода дополнительно снабжено датчиком положения, соединенным со входом системы автоматического управления, нагрузочный привод включает нагрузочный асинхронный электродвигатель, снабженный цифровым датчиком скорости, соединенным со входом системы автоматического управления, электромагнитную тормозную муфту, установленную на роторе нагрузочного асинхронного электродвигателя и соединенную с выходом системы автоматического управления, и волновой редуктор с промежуточными телами качения, при этом система автоматического управления соединена выходом со статором нагрузочного асинхронного двигателя через преобразователь частоты и выполнена с возможностью соединения с блоком управления испытуемого электропривода.
Волновой редуктор с промежуточными телами качения может содержать две ступени передач.
Волновой редуктор с промежуточными телами качения может содержать три ступени передач.
Датчиком крутящего момента может являться датчик фланцевого типа, состоящий из статора и ротора.
Заявленное изобретение поясняется чертежами:
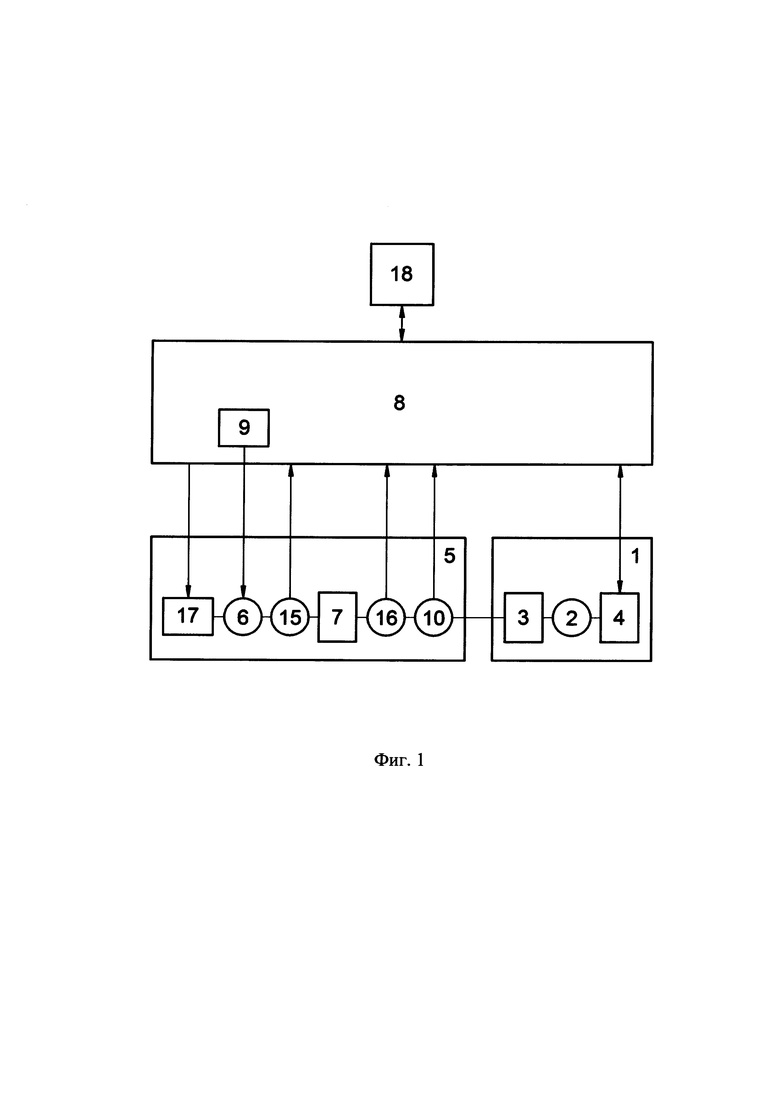
Фиг. 1 - схема стенда;
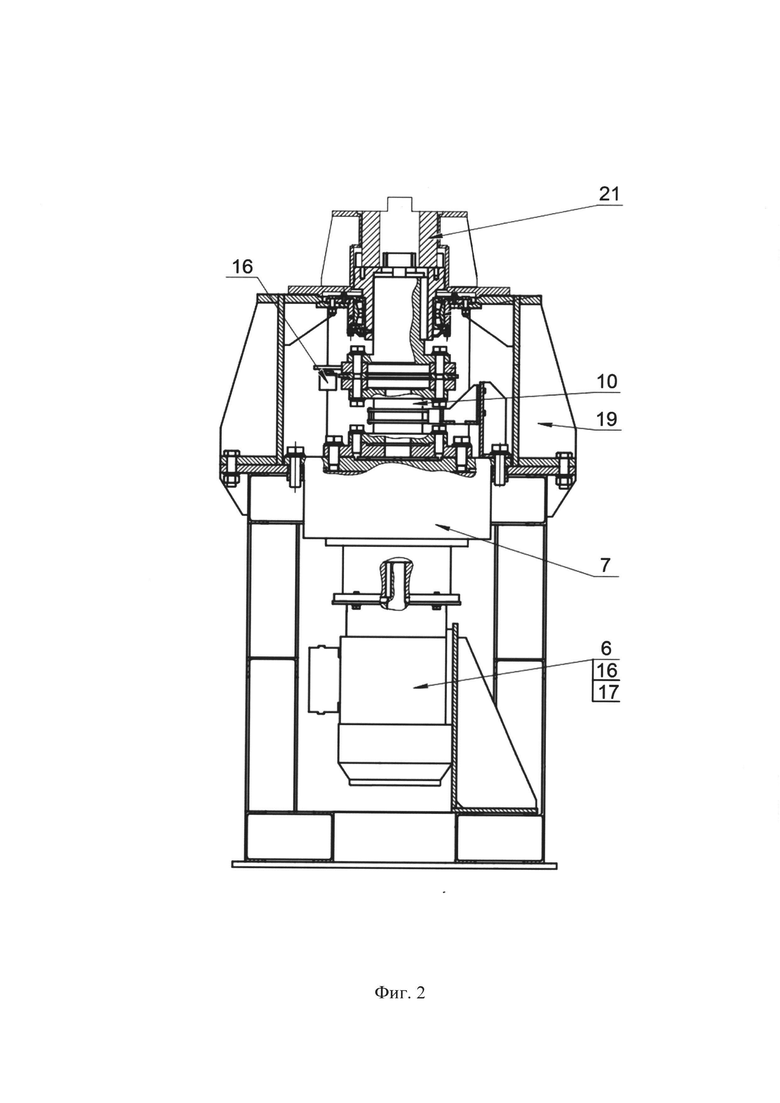
Фиг. 2 - общий вид силовой платформы;
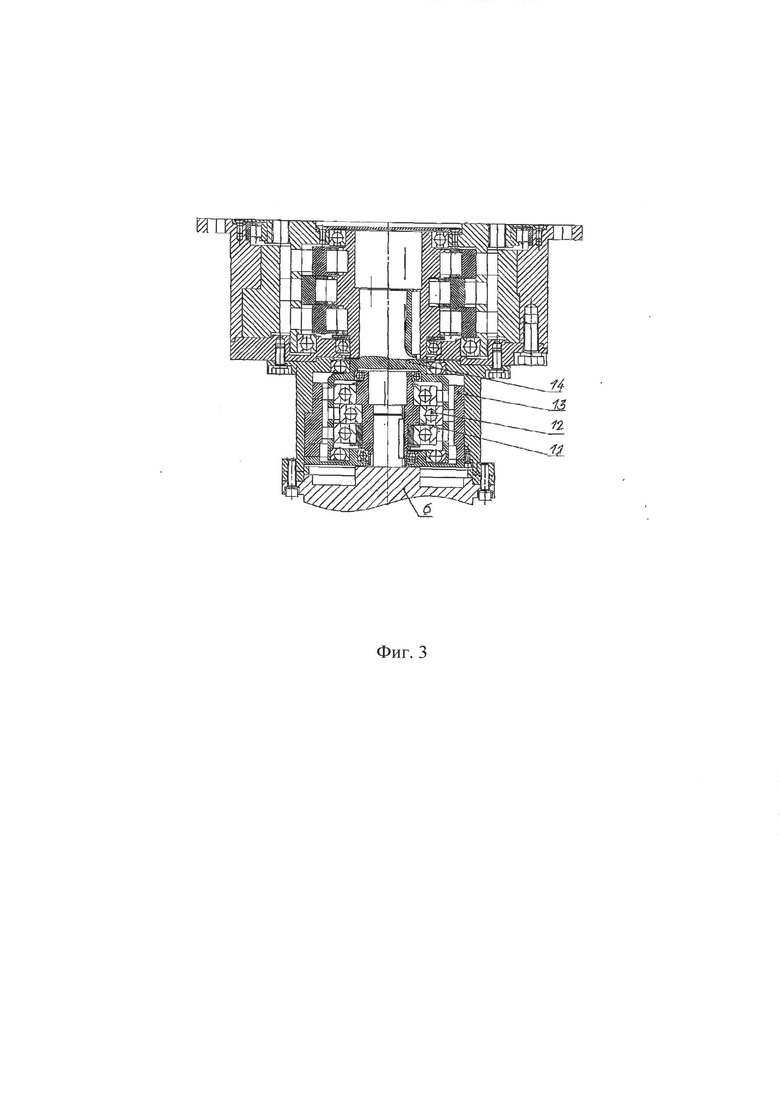
Фиг. 3 - нагрузочный волновой редуктор с промежуточными телами качения и его соединение с нагрузочным асинхронным электродвигателем.
Нижеуказанными позициями на чертежах обозначены следующие элементы:
1- испытуемый электропривод,
2- электрический двигатель испытуемого электропривода,
3- редуктор испытуемого электропривода,
4- блок управления испытуемым электроприводом,
5 - нагрузочный электропривод,
6 - нагрузочный асинхронный электрический двигатель,
7 - нагрузочный волновой редуктор с промежуточными телами качения,
8 - система автоматического управления стендом, работающая по программе,
9 - преобразователь частоты,
10 - датчик крутящего момента,
11 - генератор нагрузочного волнового редуктора с промежуточными телами качения,
12 - промежуточные тела качения нагрузочного волнового редуктора с промежуточными телами качения,
13 - венец нагрузочного волнового редуктора с промежуточными телами качения,
14 - сепаратор нагрузочного волнового редуктора с промежуточными телами качения,
15 - цифровой датчик скорости,
16 - цифровой датчик положения,
17 - электромагнитная тормозная муфта,
18 - место оператора,
19 - силовая платформа;
20 - переходная стойка;
21 - муфта.
В стенде предусмотрена силовая платформа 20 с местом установки и крепления испытуемого электропривода 1, в состав которого входят электрический двигатель 2, редуктор 3 и блок управления 4, например, электронный блок марки «БУР» для управления электроприводами запорной арматуры (httDs://tomzel.transneft.rU/u/section file/66941/bur-tl-re v3.pdf) или электромеханический блок управления со встроенными концевыми выключателями.
Нагрузочный электропривод 5 содержит асинхронный электродвигатель 6 и волновой редуктор с промежуточными телами качения 7.
Система автоматического управления 8, работающая по программе (в конкретном исполнении - это программируемый логический контроллер), соединена выходом со статором нагрузочного асинхронного электродвигателя 6 через преобразователь частоты 9 и соединена входом с датчиком крутящего момента 10. Датчик крутящего момента 10 установлен на выходном звене нагрузочного редуктора 7. В конкретном исполнении датчиком крутящего момента 10 является датчик фланцевого типа, состоящий из статора и ротора. Ротор этого датчика имеет в своем составе упругий тензоэлемент и электронный модуль, преобразующий сигналы тензорезисторов в цифровой код, который передается с ротора датчика на его статор.
Система автоматического управления 8 выполнена с возможностью соединения с блоком управления 4 испытуемого электропривода 1. Для этого в ней предусмотрены соответствующие вход и выход, которые соединяются линиями связи с блоком управления 4.
Система автоматического управления 8 предусматривает соответствующие вход и выход для подключения управления оператором 18. При необходимости быстрого прерывания испытаний система автоматического управления 8 может быть выключена оператором 18 через кнопочный пост, подключаемый к указанной системе через соответствующий вход.
Нагрузочный волновой редуктор с промежуточными телами качения 7 включает генератор 11, промежуточные тела качения 12, венец 13 и сепаратор 14. Генератор 11 соединен с ротором нагрузочного асинхронного электродвигателя 6. Сепаратор 14 является выходным звеном редуктора 7. Генератор 11 совершает планетарное движение относительно оси вращения ротора нагрузочного асинхронного электродвигателя 6. Венец 13, контактируя с промежуточными телами качения 12, поступательно перемещает их в пазах сепаратора 14. Одновременно с поступательным перемещением промежуточные тела качения 12 обкатываются по внутренним профильным впадинам венца 13, зафиксированного от вращения на корпусе редуктора 7. За счет разницы количества промежуточных тел качения 12 и внутренних профильных впадин венца 13 в процессе обката происходит поворот выходного звена редуктора 7, а именно сепаратора 14.
Количество ступеней нагрузочного волнового редуктора с промежуточными телами качения 7 определяется необходимостью обеспечения определенной частоты вращения испытуемого электропривода 1. В конкретном исполнении редуктор 7 может быть выполнен с тремя ступенями для стенда, рассчитанного на испытание электроприводов с максимальным крутящим моментом до 180000 Нм, и с двумя ступенями для стенда, рассчитанного на испытание электроприводов с максимальным крутящим моментом до 65000 Нм.
Для кинематического соединения выходных звеньев редукторов 3 и 7 используются муфты, переходники и другие соединительные детали.
Нагрузочный электропривод привод 5 с асинхронным двигателем 6 и волновым редуктором с промежуточными телами качения 7 позволяет реализовать обратную связь на преобразователь частоты 9 по скорости вращения ротора асинхронного двигателя 6 и управлять асинхронным двигателем 6 с повышением точности управления. Для этого нагрузочный асинхронный двигатель 6 снабжен цифровым датчиком скорости 15, соединенный со входом системы автоматического управления 8.
Для определения точности позиционирования выходного звена испытуемого электропривода 1 в состав заявляемого стенда введен цифровой датчик положения 16 (например, оптомеханический датчик положения, магнитный датчик положения или датчик положения, основанный на эффекте Холла), установленный на выходном звене нагрузочного редуктора 7. Датчик положения 16 соединен со входом системы автоматического управления 8.
Для обеспечения испытаний, связанных с резкой остановкой выходного звена испытуемого электропривода 1, предусмотрена электромагнитная тормозная муфта 17, установленная на роторе нагрузочного асинхронного электродвигателя 6. Электромагнитная тормозная муфта 17 соединена с выходом системы автоматического управления 8.
Для проведения испытаний испытуемый электропривод 1 устанавливают на силовой платформе 19 через соответствующую переходную стойку 20, соединяют его выходное звено с выходным звеном нагрузочного электропривода 5 посредством муфты 21.
Оператор 18 посредством персонального компьютера, соединенного с системой автоматического управления стендом 8, подает команду в блок управления 4 на включение испытуемого электропривода 1. Испытуемый электропривод 1 начинает свое движение и одновременно приводит в движение соединенное с ним выходное звено нагрузочного электропривода 5. Затем через систему управления 8 и преобразователь частоты 9 автоматически по программе подается команда на включение нагрузочного асинхронного электродвигателя 6 нагрузочного редуктора 7. На выходном звене нагрузочного редуктора 7 создается крутящий момент в режиме холостого хода.
Далее путем управления, предусмотренного программой, с помощью преобразователя частоты 9 создают крутящий момент в генераторном режиме на выходном звене нагрузочного электропривода 5 и, следовательно, на выходном звене испытуемого электропривода 1.
Датчик крутящего момента 10 фиксирует крутящий момент на выходном звене испытуемого электропривода 1. Данные о крутящем моменте испытуемого электропривода 1, а также данные с цифрового датчика скорости 15 и цифрового датчика положения 16 по линиям связи поступают в систему автоматического управления 8.
Для испытания электропривода 1 в режимах, связанных с резкой остановкой его выходного звена, преобразователь частоты 9 действует совместно с электромагнитной тормозной муфтой 17, установленной на роторе нагрузочного асинхронного электродвигателя 6.
По сравнению с цилиндрической передачей прототипа, нагрузочный волновой редуктор с промежуточными телами качения 7 заявляемого стенда обеспечивает большой крутящий момент при минимальном количестве ступеней передач (2-3 ступени). Так как габариты нагрузочного волнового редуктора с промежуточными телами качения 7 возрастают незначительно с увеличением максимального крутящего момента, на который он рассчитан, то и заявляемый стенд для испытания электропривода 1 будет иметь меньшие габариты для больших крутящих моментов по сравнению со стендом, в котором используют цилиндрический редуктор согласно прототипу.
Так как в составе заявляемого стенда имеется нагрузочный асинхронный электродвигатель 6, управляемый через преобразователь частоты 9, то на заявляемом стенде в отличие от прототипа возможно регулирование в автоматическом режиме скорости нарастания нагрузочного крутящего момента (нагрузки). Регулирование скорости нарастания нагрузки на стенде позволяет имитировать реальные условия запорной арматуры, например, режим холостого хода во время снижения давления в магистральном трубопроводе, режим наезда на упор при закрытии арматуры, режим пуска шибера на упор при выходе из строя блока управления 4 испытуемого электродвигателя 1. Оператор 18, работая на персональном компьютере, может выбрать необходимый режим и дать команду системе автоматического управления 8.
Заявляемый стенд обеспечивает:
а) проведение испытаний электропривода в режимах «пуск на упор», «наезд на упор»;
б) проведение калибровки измерителя крутящего момента, входящего в состав стенда, без разборки стенда;
в) формирование и контроля сигналов дискретного управления электроприводом;
г) формирование и контроля сигналов управления электроприводом по интерфейсам RS-485;
д) контроль аналоговых сигналов электропривода (от 4 мА до 20 мА);
е) изменение частоты питающего напряжения от 5 Гц до 50 Гц;
ж) возможность изменения чередования фаз выходного питающего напряжения;
з) возможность имитации аварийных ситуаций:
- межфазное короткое замыкание обмоток электродвигателя;
- однофазное короткое замыканий обмотки электродвигателя на корпус;
- работа на двух фазах (обрыв фазы питающего напряжения).
и) измерение токов и напряжений в цепях электропривода;
к) возможность автоматизации проведения испытаний;
л) обмен информацией с персональным компьютером,
м) осуществление проверки функционирования испытуемого электропривода 1, а именно: работу на холостом ходу и работу с заданным крутящим моментом.
На стенде можно провести также следующие испытания: проверку максимального крутящего момента на выходном звене испытуемого электропривода 1 и диапазона ограничения (регулирования) крутящего момента, проверку номинальной частоты вращения выходного звена испытуемого электропривода 1; проверку диапазона регулирования частоты вращения выходного вала испытуемого электропривода 1 (для регулирующей арматуры); проверку погрешности остановки выходного звена испытуемого электропривода 1 в заданном положении; проверку функций управления (формирование и считывание сигналов телеуправления для блока 4 испытуемого электропривода 1); проверку автоматических защит испытуемого электропривода 1 от аварийных ситуаций и самодиагностики; проверку требований к параметрам электропитания испытуемого электропривода 1, включающих а) формирования трехфазного питающего напряжения электропривода с показателями качества по ГОСТ 32144; формирования кратковременных провалов питающего напряжения на 50% от номинального значения; формирования повышенного напряжения питания на 47% от номинального значения; формирования грозовых и коммутационных импульсных напряжений; формирования несинусоидальности питающего напряжения; формирования кратковременных отключений питания.
Таким образом, за счет обеспечения регулирования в автоматическом режиме скорости нарастания крутящего момента заявляемый стенд позволяет имитировать реальные условия работы запорной арматуры с различными временами нарастания нагрузок, что повышает эффективность его работы.
Кроме того, за счет нагрузочного электропривода содержащего волновой редуктор с промежуточными телами качения, увеличение максимального крутящего момента испытуемых тяжело нагруженных электроприводов не приводит к значительному увеличению габаритов стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики уплотнительных поверхностей запорной арматуры | 2017 |
|
RU2666973C1 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2006 |
|
RU2314450C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2005 |
|
RU2290745C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2285182C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| Установка для испытания редуктора | 2023 |
|
RU2809048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2659806C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСМИССИЙ | 2011 |
|
RU2474803C1 |
| ЭЛЕКТРОПРИВОД | 2016 |
|
RU2627489C1 |
Изобретение относится к испытаниям в машиностроении. Сущность: стенд для испытания электроприводов содержит нагрузочный привод, систему автоматического управления, нагрузочный асинхронный электродвигатель. Выходное звено нагрузочного привода выполнено с возможностью кинематического соединения с выходным звеном испытуемого электропривода и снабжено датчиком крутящего момента. Система автоматического управления соединена с нагрузочным приводом, выполнена с возможностью управления оператором и имеет вход и выход. Вход системы автоматического управления соединен с датчиком крутящего момента. Выходное звено нагрузочного привода дополнительно снабжено датчиком положения, соединенным со входом системы автоматического управления. Нагрузочный привод включает нагрузочный асинхронный электродвигатель, снабженный цифровым датчиком скорости, электромагнитную тормозную муфту, и волновой редуктор с промежуточными телами качения. Система автоматического управления соединена выходом со статором нагрузочного асинхронного двигателя через преобразователь частоты и выполнена с возможностью соединения с блоком управления испытуемого электропривода. Технический результат: повышение эффективности работы стенда за счет расширения его функциональных возможностей. 2 з.п. ф-лы, 3 ил.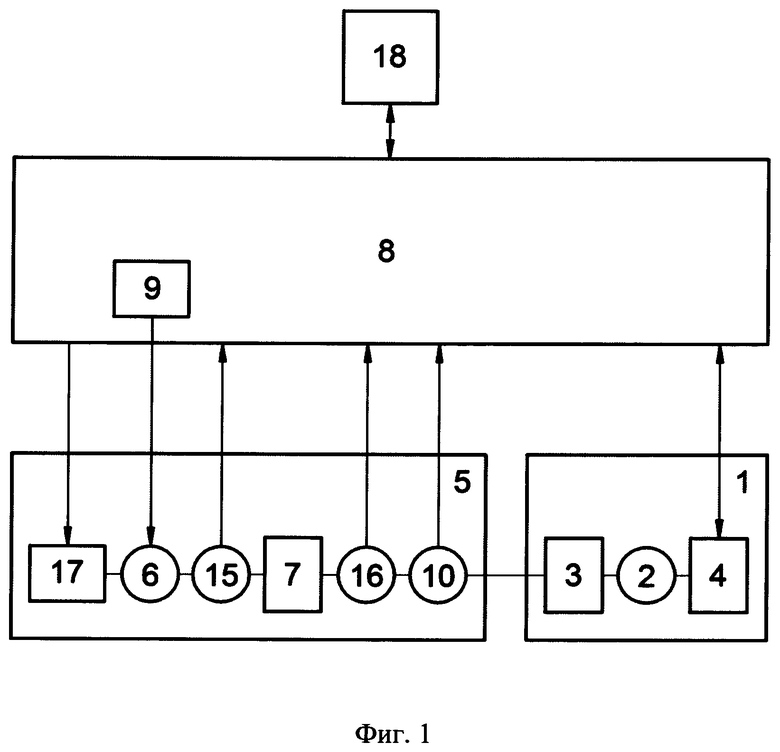
1. Стенд для испытания электроприводов, включающих электродвигатель, редуктор и блок управления, содержащий нагрузочный привод, выходное звено которого выполнено с возможностью кинематического соединения с выходным звеном испытуемого электропривода и снабжено датчиком крутящего момента, и соединенную с нагрузочным приводом систему автоматического управления, выполненную с возможностью управления оператором и имеющую вход и выход, вход системы автоматического управления соединен с датчиком крутящего момента, отличающийся тем, что выходное звено нагрузочного привода дополнительно снабжено датчиком положения, соединенным со входом системы автоматического управления, нагрузочный привод включает нагрузочный асинхронный электродвигатель, снабженный цифровым датчиком скорости, соединенным со входом системы автоматического управления, электромагнитную тормозную муфту, установленную на роторе нагрузочного асинхронного электродвигателя и соединенную с выходом системы автоматического управления и волновой редуктор с промежуточными телами качения, при этом система автоматического управления соединена выходом со статором нагрузочного асинхронного двигателя через преобразователь частоты и выполнена с возможностью соединения с блоком управления испытуемого электропривода.
2. Стенд по п. 1, отличающийся тем, что волновой редуктор с промежуточными телами качения содержит две ступени передач.
3. Стенд по п. 1, отличающийся тем, что волновой редуктор с промежуточными телами качения содержит три ступени передач.
| УСТРОЙСТВО ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА | 2011 |
|
RU2475666C1 |
| Устройство для испытания электроприводов | 1987 |
|
SU1515314A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2521788C2 |
| CN 108845260 A, 20.11.2018 | |||
| CN 206788329 U, 22.12.2017. | |||

