Изобретение относится к электроприводам, в частности к комбинированным средствам управления запорной арматурой (задвижками, клапанами, кранами и т.п.) с помощью электродвигателя и вручную, и может быть использовано на трубопроводах при транспорте нефти, нефтепродуктов, в химической и нефтехимической отраслях.
Известен электропривод (патент РФ на изобретение №2154219, F 16 K 31/05, опубликованный 10.08.2000, бюллетень №22), содержащий электродвигатель, редуктор, ручной дублер, кулачковую муфту ограничения крутящего момента, преобразователь и соединенное с ним регистрирующее устройство. Преобразователь кинематически связан с муфтой ограничения крутящего момента. Муфта ограничения крутящего момента выполнена в виде подпружиненной подвижной и неподвижной полумуфт. При возрастании величины крутящего момента на выходном валу электропривода осевое перемещение подвижной полумуфты передается преобразователю, который при соответствующей механически заданной в нем величине крутящего момента для данного направления вращения вала механически воздействует на регистрирующее устройство.
Регистрирующее устройство срабатывает и отключает электрическое питание электродвигателя. Недостатком этого электропривода является неточность отключения электродвигателя муфтой по отношению к заданному крутящему моменту и непредусмотренное срабатывание муфты при запуске привода.
Погрешность отключения составляет от 40 до 100%. Кроме того, после отключения электродвигателя от сети детали электропривода испытывают ударную нагрузку, что приводит к их сотрясению и износу и снижает надежность работы и срок службы электропривода. Муфта излишне нагружает шпиндель запорной арматуры за счет инерции вращающихся деталей и создает ударные нагрузки на деталях электропривода и на арматуре.
Известен электропривод, описанный в Руководстве по хранению, установке и техническому обслуживанию «Приводы для трубопроводной арматуры и системы контроля» (фирма BIFFI, Италия, 1994 г.). Электропривод содержит электродвигатель, редуктор, ручной дублер, электромеханическую муфту ограничения крутящего момента и потенциометрический датчик положения выходного звена редуктора, при этом муфта и датчик снабжены механизмами настройки срабатывания выключателей электродвигателя соответственно при определенном моменте и при определенном положении.
Недостатками этого электропривода вследствие использования электромеханической муфты ограничения крутящего момента являются неточность отключения электродвигателя, наличие ударной нагрузки на детали электропривода и на арматуру при отключении электродвигателя от сети, что приводит к их износу, снижению надежности работы и срока службы. Задание предельного крутящего момента требует удаления кожуха с этого механизма, делая устройство неудобным в эксплуатации.
Недостатком потенциометрического датчика положения выходного звена редуктора является переменная точность измерения, зависящая от пути, пройденного им. Так, точность измерения потенциометрического датчика падает при малом пути прохождения по гиперболической функции.
Известен электропривод, описанный в Рекламном проспекте «Приводы Роторк класса IQ. Новое поколение интеллектуальных необслуживаемых трехфазных электрических приводов» (публикация 110 R, издание 12V2000 г., фирма Роторк, Великобритания, США). Электропривод содержит асинхронный электродвигатель, редуктор, ручной дублер, датчик положения затвора выходного звена редуктора, датчик крутящего момента. Датчиком положения является магнитоимпульсный счетчик, основанный на эффекте Холла. Датчик положения преобразует количество оборотов на валу электродвигателя в электрический сигнал, который сравнивается с заданными конечными положениями. Датчик положения питается от электрической сети. При отсутствии питания от сети архивацию данных и калибровку конечных положений выходного звена редуктора поддерживает электрическая батарея. Датчик крутящего момента выполнен как пьезодатчик. Осевая нагрузка вала червяка электродвигателя с помощью пьезодатчика преобразуется в электрический сигнал, прямо пропорциональный развиваемому крутящему моменту в электроприводе и сравниваемый с заданным сигналом предельного крутящего момента.
Недостатками этого электропривода являются следующие. При израсходовании ресурса электрической батареи и работе с ручным дублером утрачивается калибровка конечных положений, и требуется новая калибровка. Осевая нагрузка вала червяка электродвигателя может быть распределена неравномерно, что влияет на точность работы датчика крутящего момента.
Известен электропривод, описанный в Рекламном проспекте «Защита, контроль и мониторинг электроприводов Accutronix MX» фирмы Limitorque Corporation, 2000 г. и выбранный в качестве наиболее близкого аналога (прототип). Электропривод содержит асинхронный электродвигатель с короткозамкнутым ротором, передаточный механизм в виде редуктора, ручной дублер, оптомеханический датчик положения выходного звена передаточного механизма, датчик крутящего момента. Оптомеханический датчик положения является энкодером абсолютного положения (патент США №5640007, G 01 D 5/347). Сенсорный механизм энкодера включает светоизлучатель и светоприемник (фототранзисторы), которые определяют диапазон кодовых связей, обеспеченных между парой энкодерных колес, чье вращение согласуется с вращением вала (ротора) электродвигателя. Оптомеханический датчик положения энергонезависим от электропитания, то есть отсутствие какого-либо питания у датчика положения не влияет на определение им положения выходного звена передаточного механизма. Датчик крутящего момента определяет «работу на упор», то есть работает по принципу, например, тензодатчика или пьезодатчика. Этот электропривод обладает следующими недостатками. Наличие датчика крутящего момента является вмешательством в конструкцию передаточного механизма (редуктора) и приводит к усложнению, увеличению габаритов и снижению надежности передаточного механизма и электропривода в целом. Кроме того, требуется подбор датчика крутящего момента в зависимости от крутящего момента, на который рассчитан электропривод, а это усложняет сборку электропривода. При использовании подобных датчиков крутящего момента для некоторых типов передаточных механизмов, например, волновых редукторов с промежуточными звеньями, отсутствует линейность в определении крутящего момента в зависимости от нагрузки на электроприводе, что снижает точность и надежность отключения электродвигателя при превышении предельного крутящего момента.
Задачами изобретения являются упрощение конструкции, уменьшение габаритов, повышение надежности работы электропривода.
Технический результат, обеспечиваемый изобретением по сравнению с прототипом, выражается в устранении механического вмешательства элемента, определяющего крутящий момент, в конструкцию передаточного механизма электропривода, а также в повышении точности определения крутящего момента этим элементом независимо от нагрузки, на которую рассчитан электропривод, и для любого типа передаточного механизма.
Как и прототип, электропривод содержит трехфазный асинхронный электродвигатель с короткозамкнутым ротором, передаточный механизм, оптомеханический датчик положения выходного звена передаточного механизма.
В отличие от прототипа электропривод содержит блок крутящего момента, выполненный с возможностью вычисления крутящего момента как функции тока статора асинхронного электродвигателя, частоты вращения его ротора, частоты тока, а также с возможностью задания предельного крутящего момента и имеющий первый вход, соединенный со статорной обмоткой асинхронного электродвигателя через датчик тока, второй вход, соединенный с оптомеханическим датчиком положения выходного звена передаточного механизма, и выход, задатчик положения выходного звена передаточного механизма, имеющий первый вход задания положения, второй вход, соединенный с оптомеханическим датчиком положения, и выход, при этом электропривод выполнен с возможностью определения частоты вращения ротора асинхронного электродвигателя для блока крутящего момента по показанию оптомеханического датчика положения.
Блок крутящего момента может быть выполнен с возможностью вычисления крутящего момента как функции, дополнительно зависящей от параметров передаточного механизма.
Выход блока крутящего момента может быть соединен с бесконтактным коммутатором напряжения. При этом блок крутящего момента может иметь третий вход для соединения с питающей асинхронный электродвигатель электрической сетью на участке до бесконтактного коммутатора напряжения.
Выход задатчика положения выходного звена передаточного механизма может быть также соединен с бесконтактным коммутатором напряжения.
Блок крутящего момента может быть выполнен с возможностью вычисления крутящего момента как функции, дополнительно зависящей от напряжения питающей асинхронный электродвигатель сети.
Электропривод может быть выполнен с возможностью задания предельного крутящего момента для крайнего положения выходного звена передаточного механизма.
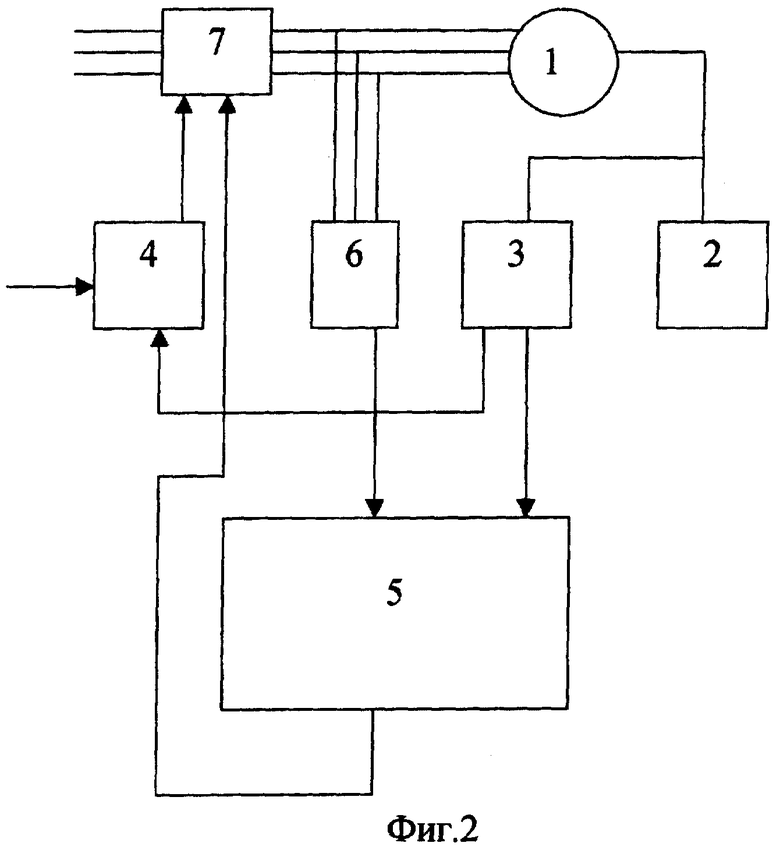
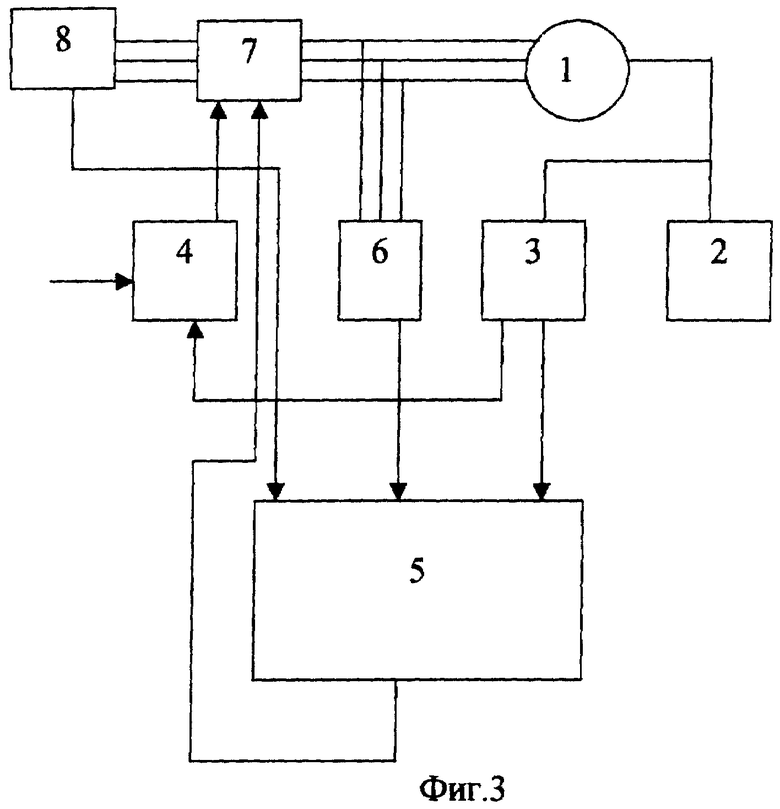
Блок-схема электропривода изображена на фигурах 1-3 со следующими обозначениями: 1 - асинхронный электродвигатель, 2 - передаточный механизм, 3 - оптомеханический датчик положения выходного звена передаточного механизма, 4 - задатчик положения выходного звена передаточного механизма, 5 - блок крутящего момента, 6 - датчик тока, 7 - бесконтактный коммутатор напряжения, 8 - электрическая сеть.
Электропривод (фиг.1) содержит асинхронный электродвигатель 1 с короткозамкнутым ротором, приводящий в действие передаточный механизм 2. Передаточный механизм 2 может быть выполнен, например, в виде червячного, волнового редуктора, редуктора с промежуточными звеньями, кулисы.
Датчик положения 3 выполнен оптомеханическим. Под оптомеханическим понимается датчик, состоящий из ряда оптических дисков, связанных между собой механическими звеньями с различными коэффициентами передач, зависящими от способа кодирования и декодирования (например, код Грея, двоичный код и т.д.).
Задатчик положения 4 выходного звена передаточного механизма 2 имеет первый вход задания положения и второй вход, соединенный с оптомеханическим датчиком положения 3, а также выход. Задатчик положения 4 выполнен в виде устройства, запоминающего сигналы положения, задающиеся через первый вход, и сравнивающего с ними сигнал, поступающий на второй вход задатчика положения 4 от оптомеханического датчика положения 3 о текущем положении выходного звена передаточного механизма 2. При достижении выходным звеном передаточного механизма 2 заданного положения на выходе задатчика положения 4 формируется сигнал об этом.
Блок крутящего момента 5 выполнен с возможностью вычисления крутящего момента как функции тока статора асинхронного электродвигателя 1, частоты вращения ротора асинхронного электродвигателя 1, частоты тока.
В качестве сведений, подтверждающих возможность вычисления крутящего момента блоком 5, можно привести следующие. Из теории электропривода известно, что крутящий момент на валу асинхронного электродвигателя является функцией f(I2, S) квадрата тока статора I2 и скольжения S в асинхронном двигателе, причем скольжение вычисляют по формуле  где wс - частота тока, wp - частота вращения ротора асинхронного электродвигателя 1.
где wс - частота тока, wp - частота вращения ротора асинхронного электродвигателя 1.
Данные о величине тока I статора асинхронного электродвигателя 1 и частоте wс тока поступают в блок крутящего момента 5 за счет соединения первого входа этого блока 5 через датчик тока 6 со статорной обмоткой асинхронного электродвигателя 1.
При этом электропривод выполнен с возможностью определения частоты вращения ротора асинхронного электродвигателя 1 wp для блока крутящего момента 5 по показанию оптомеханического датчика положения 3, с которым блок крутящего момента 5 соединен вторым входом. Частота вращения ротора асинхронного электродвигателя 1 определяется по показанию оптомеханического датчика положения 3 согласно следующим зависимостям:


где wд - частота импульсов оптомеханического датчика положения 3,
f(wд) - функция частоты импульсов оптомеханического датчика положения 3,
Ти - интервал времени, за который измеряется частота импульсов оптомеханического датчика положения 3,
Nw - количество импульсов оптомеханического датчика положения 3 за интервал времени Ти, являющееся кодом и пропорциональное частоте вращения ротора wp асинхронного электродвигателя 1,
wp - частота вращения ротора асинхронного электродвигателя 1,
f(wp) - функция частоты вращения ротора асинхронного электродвигателя 1.
За интервал времени Ти определяют функцию f f(wд). По формуле (1) вычисляют код (количество импульсов оптомеханического датчика положения 3) Nw, пропорциональный по формуле (2) частоте вращения ротора асинхронного двигателя 1. Таким образом, код Nw, полученный по показанию оптомеханического датчика положения 3, пропорционален частоте вращения ротора wp и учитывается блоком крутящего момента 5 при вычислении крутящего момента как величина, соответствующая частоте вращения ротора wp асинхронного электродвигателя 1.
В электроприводе для реализации возможности определения частоты вращения ротора асинхронного электродвигателя 1 wp по показанию оптомеханического датчика положения 3 имеются средство измерения интервала времени Ти, за который измеряется частота импульсов оптомеханического датчика 3, например, таймер, а также счетчик импульсов оптомеханического датчика 3.
Блок крутящего момента 5 выполнен с возможностью задания предельного крутящего момента. Предельный крутящий момент задают программируемым способом.
На выходе блока 5 формируется сигнал о превышении вычисленного текущего крутящего момента над заданным предельным крутящим моментом.
Для более точного вычисления крутящего момента блок 5 может быть выполнен с возможностью вычисления крутящего момента как функции, дополнительно зависящей от параметров передаточного механизма 2. Под параметрами передаточного механизма 2 имеются в виду тип передачи (червячный или другой редуктор, кулиса и т.п.), коэффициент передачи, исполнение элементов передачи (качество, точность установки элементов относительно друг друга, наличие люфтов, размеры элементов с учетом нагрузки и т.п.). С передаточного механизма 2 снимают характеристику, зависящую от указанных выше параметров. Информация о параметрах в виде этой характеристики вносится в блок крутящего момента 5 программируемым способом.
Выход блока крутящего момента 5 может быть соединен с бесконтактным коммутатором напряжения 7 (фиг.2, 3). Бесконтактный коммутатор напряжения 7 представляет собой тиристорный или любой другой регулятор напряжения. Бесконтактный коммутатор напряжения 7 служит для плавного торможения асинхронного электродвигателя 1 с последующим прерыванием его электрического питания при поступлении на бесконтактный коммутатор напряжения 7 сигнала с выхода блока крутящего момента 5 о превышении заданного предельного крутящего момента. Плавное торможение асинхронного двигателя 1 снижает износ элементов электропривода и дополнительно увеличивает надежность его работы.
Если выход блока крутящего момента 5 соединен с бесконтактным коммутатором напряжения 7, то блок 5 может иметь третий вход (фиг.3) для соединения с электрической сетью 8 на участке до бесконтактного коммутатора напряжения 7. Этот вход предназначен для поступления в блок 5 данных о частоте wc тока питающей электродвигатель 1 сети. Соединение на этом участке исключает возможное искажение бесконтактным коммутатором напряжения 7 данных о частоте тока питающей сети (особенно за малый период времени снятия данных) и служит для повышения точности вычисления крутящего момента блоком 5.
Выход задатчика положения 4 выходного звена передаточного механизма может быть соединен с бесконтактным коммутатором напряжения 7, который плавно тормозит и отключает электродвигатель 1 при поступлении сигнала с выхода задатчика положения 4 о достижении выходным звеном передаточного механизма 2 заданного положения.
Если крутящий момент в блоке 5 вычисляется по алгоритму, учитывающему электродвижущую силу (э.д.с.) и частоту вращения ротора wp асинхронного электродвигателя 1, то блок крутящего момента 5 может быть выполнен с возможностью вычисления крутящего момента, как функции, дополнительно зависящей от напряжения питающей асинхронный электродвигатель 1 электрической сети, так как э.д.с. является функцией напряжения этой сети, тока статора асинхронного электродвигателя 1 и параметров схемы замещения электродвигателя. Последние вносятся в блок крутящего момента 5 и используются им для вычисления крутящего момента. Данные о напряжении питающей асинхронный электродвигатель 1 сети поступают в блок крутящего момента 5 через первый (фиг.1) или третий (фиг.3) входы блока 5.
Электропривод может быть выполнен с возможностью задания предельного крутящего момента для крайнего положения («открыто» или «закрыто») выходного звена передаточного механизма 2. Эта возможность необходима, например, при таком управлении запорной арматурой, когда следует создать определенное усилие в конце хода затвора запорной арматуры. Возможность реализована в блоке крутящего момента 5 программируемым путем.
Электропривод работает следующим образом.
Поочередно устанавливают выходное звено передаточного механизма 2 в необходимые положения. При этом в задатчике положения 4 задают сигналы в виде кодов, соответствующие этим положениям.
В блоке крутящего момента 5 задают предельный крутящий момент. Асинхронный электродвигатель 1 (фиг.1) приводит в движение передаточный механизм 2. Передаточный механизм 2 передвигает свое выходное звено. Оптомеханический датчик положения 3 определяет положение выходного звена передаточного механизма 2 на всем пути его движения и выдает информацию о положении в виде сигналов-кодов.
При достижении выходным звеном передаточного механизма 2 установленного положения сигнал от оптомеханического датчика положения 3 поступает к задатчику положения 4. Задатчик положения 4 сравнивает его с заданным в нем сигналом и передает сигнал на свой выход о достижении установленного положения. Задатчик положения 4 может передать сигнал со своего выхода на бесконтактный коммутатор напряжения 7 (фиг.2, 3). В этом случае бесконтактный коммутатор напряжения 7 плавно тормозит и отключает электродвигатель 1.
Предельный крутящий момент, заданный в блоке крутящего момента 5 программируемым путем, сравнивается с вычисляемым в этом же блоке 5 текущим крутящим моментом. Сигнал о превышении предельного крутящего момента поступает на выход блока крутящего момента 5 (фиг.1). Сигнал о превышении предельного крутящего момента может поступить с выхода блока крутящего момента 5 на бесконтактный коммутатор напряжения 7 (фиг.2, 3). Бесконтактный коммутатор напряжения 7 плавно тормозит и отключает асинхронный электродвигатель 1 от питающей сети.
Если электропривод выполнен с возможностью задания предельного крутящего момента для крайнего положения выходного звена передаточного механизма 2, то в блоке крутящего момента 5 задают программируемым путем значение предельного крутящего момента для этого положения. При достижении выходного звена передаточного механизма 2 крайнего положения на выходе блока крутящего момента 5 формируется сигнал в случае превышения заданного предельного крутящего момента.
Таким образом, по сравнению с прототипом в заявляемом изобретении происходит упрощение конструкции, уменьшение габаритов, повышение надежности работы электропривода, а также надежности и точности в определении крутящего момента в электроприводе независимо от нагрузки, на которую он рассчитан, и для любого типа передаточного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2005 |
|
RU2290745C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2006 |
|
RU2314450C1 |
| ЭЛЕКТРОПРИВОД | 2016 |
|
RU2627489C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2659806C1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2021 |
|
RU2780757C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2376513C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА | 2003 |
|
RU2268392C2 |
Изобретение относится к электроприводам, в частности к комбинированным средствам управления запорной арматурой (задвижками, клапанами, кранами и т.п.) с помощью электродвигателя и вручную, и может быть использовано на трубопроводах при транспорте нефти, нефтепродуктов, в химической и нефтехимической отраслях. Электропривод содержит трехфазный асинхронный электродвигатель с короткозамкнутым ротором, передаточный механизм, оптомеханический датчик положения выходного звена передаточного механизма. Электропривод содержит блок крутящего момента, выполненный с возможностью вычисления крутящего момента как функции тока статора асинхронного электродвигателя, частоты вращения его ротора, частоты тока, а также с возможностью задания предельного крутящего момента и имеющий первый вход, соединенный со статорной обмоткой асинхронного электродвигателя через датчик тока, второй вход, соединенный с оптомеханическим датчиком положения выходного звена передаточного механизма, и выход. Задатчик положения выходного звена передаточного механизма имеет первый вход задания конечного положения, второй вход, соединенный с оптомеханическим датчиком положения, и выход. Электропривод выполнен с возможностью определения частоты вращения ротора асинхронного электродвигателя для блока крутящего момента по показанию оптомеханического датчика положения. Изобретение позволяет упростить конструкцию, уменьшить габариты, повысить надежность работы электропривода. 6 з.п. ф-лы, 3 ил.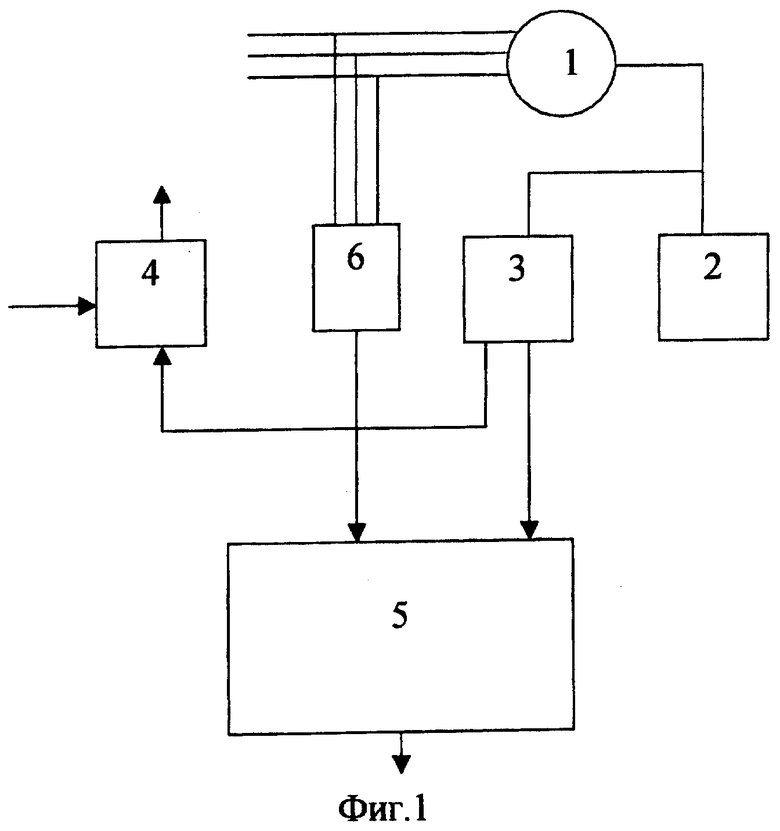
| Устройство для разложения изображения в дальновидении | 1933 |
|
SU36478A1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2154219C1 |
| Электропривод арматуры | 1980 |
|
SU960481A1 |
| US 6079442 A, 27.06.2000. | |||

