(21) А364352/24-07 (22) 30.10.87 (46) 15. 10.89, Kion. 38
(71)Ленинградский элрь;тро гсу. кий институт им. В.И.Ульлнотм Лгмг(- на)
(72)И.Л. (ата11ог, Г. Ги околор., Л.Л.Тудер и Г. С. Белоруко)
(53)621.316.718.5 (088.8)
(56)Лвторскоп спидотольстнп Г(;с; 1000950, кл. G 01 Г 3t/34, ; СгП,
Авторское спидстел,( . (f 741170, кл. Г, 01 Р 19/06, Н 02 Р 5/06, 197ь.
(54)устрпйст) ;) ИСПЫТАНИЯ :;.;г:1( ГРОПРИВОДОВ
(57)Изобретение относитея г : -:-:т- ротехни1 ;е и быть иглгользоплип для пропедения исн1.гтаниГ1 систгм уп- pan л е кия электроприводами ипстояни - го уока. Целью изобретения яплиется расширение функц11оналТ)Иых Н ;)чМ ); .ос- Tei i устройстнп для испытания -iJU Ki po- 17ривод,о:), Устрсч штпо содержит ис.чь - TyeNnnii г)лектроир1 под 1 , нагрузочную машину 2, регулятор 5 нагрузо П ого моменпм, ч игл сторный т11)еоб) iii
-v„J fcrrrrr ,--.-.-,
( и блок 8 моде, меманизча, пьтход ь.м : с/рого соединен с 1г;одом р(:гу;:ят о- ра 5 нагрузочного момента, зыход К(т- 1 орого соединен с пхо/юм тири;:то11но- 1,1 11)ег;б;-1;1:1ОПсП еля Ь, к .пход,у i:pt o(ipa3or ;i-i-e;.4 ( lii ДК. 1;0- .11,, I Krj.iii. iH оПг |-1тка нагрузочной ма- ;чип1.1 , .ал I OTvvion механически сое- динг-н с нало:- ;и1И1 1тс чя исимтл емого эле :т ;ог1р1пк1ла . К ;ia i;uiM устроЛст- пг- о;1(;с11ечина1;тс;м :|);-.;тг ирчиа1Пи; личного вида и нелич . нагрузочного :-мс нта, 1)асмирение ,l;oиaлыи.Ix иозможностеГг и HoiiMiiieiMie точности ра- за. счет TOI-O, что устршЧстпо по ио;;лет м- :iC 4Hj). антг1ма 1 ичес- i-У; систему У .4 зле:;т 1о 1 5Иг.о- л.-. сложных :)лект 1О iexa.H4( Ci;i;x сСгм-; ; To:i, , хара1:те;)И: у; Ц11х,:я налитием нер- -.ой инерционно м .ссы vfex,iHH3Ma, жггть.о спязаниой с ;пигате::ем, а гак- жс механизм;., ха1 )акт -ризуюгин ся упру- го. г ,1о между ц игателем и nepTioi i м и;сой :-и ханизма. Прн необх(Диг:ос ) И ycTpoficTHo может мо; ,ели1)она1 исто инерцион1гу1о нагруз1су за счет отк::ю- чиния KOHTy-jia молелироиа1И я уиругот о г- |1М(.. 1 и.п.
Л
(/; с
О1
|НВ
ел
сс
N.
(7 JI 2 15
J
I
151
ИзоПретеиие относптсл к электротехнике и может быть использовано для пропедепия испытаний систем управле- гия электроприводами постоянного то- к ,
Целью и обретения является расширение функгщональных возможностей устройства для испытания электроприводов ,
iia чертеже представлена функциональная схема устройства для испытания электроприводов.
УстроГгство для испытания электро- приводоп содержит испытуемьи электро- нрипод 1 постоянного тока, состоящий и: системы г{пдчииенного регулирования и двигателя, который механически соединим с валом нагрузочной машины 2, тахогенератор 3, первый сумматор 4, первым входом соединенный с выходом регулятора скорости испытуемого электропривода 1, а выходом подклю- чепны { через регулятор 5 нагрузочного момента к входу тиристорного преобразователя 6, к выходу которого присоединена через датчик 7 тока якорная обмотка нагрузочно Maiiiinthi 2, выход датчика 7 тока соединен с вторым входом регулятора 5 пагрузочног о момента, третий вход которого соединен с выходом тахогеператора 3 и входом блока 8 модели механизма, состоящет из последовательно соединенных второго сумматора 9, первого интегратора 10, третьего сумматора 11, второго интегратора 12, инвертора 13, выход которого соединен с вторым входом в 1 о рого cyм aтopa 9, в гх;од второго гумма тора 9 соединен с вторым входом третье го сумматора 1 1 , выход которого динеп через масштабирующий усилитель 14 с вторым входо 1 первого сумматора 4, Кроме того, устройство для испытания электроприводов содер7кит пропор пиональный усилитель 15, блок 16 вь1- деления статического момента, три входа которого соответственно соеди 1ены с выходом датчика 7 тока нагрузочной машины, выходом тахогенератора 3, выходом датчика тока двигателя испытуемого электропривода 1 постоянного тока, выход блока 16 выделения статического момента соед1П1ен с третьим вхо- хом первого cvTviMaTopa 4, четвертый вход которого через пропорциональный ус ии1тель 15 соединен с выходом второго сумматора 9 блока 8 модели, механизма.
314
Устройство для испытания электроприводов работает следующим образом.
На вход системы подчиненного регулирования испытуемого электропривода 1 постоянного тока подают сигнал задания на разгон привода, одновременно с этим с выхода тахогенератора 3 поступает сигнал на первый вход второ
Q го сумматора 9 блока 8 модели механизма. С выхода второго сумматора 9 сигнал поступает на вход первого интегратора 10, а с его выхода на вход третьего сумматора 11. Постоянная вре5 меня интегрирования первого интегратора 10 выбирается равной постоянной времени жесткости моделируемого механизма Т. Моделирование коэффициента К(-, учитывающего механическое демп0 фирование, осуществляется путем введения сигнала с выхода второго сумматора 9 на второй инвертирующий вход третьего сумматора 11. С выхода третьего сумматора 11 сигнал поступа5 ет на вход второго интегратора 12, а с его выхода через инвертор 13 на второй вход второго сумматора 9. Постоянная времени интегрирования второго интегратора 12 выбирается равной
Q механической постоянной времени второй массы упругого механизма. В результате на выходе второго интегратора 12 формируется сигнал, пропорциональный скорости второй массы упругого механизма GJ, а на выходе третьего с : -1матора 11 - сигнал, пропорциональный упругому моменту М.
KoHi yp воспроизведения упругого N OMeHTa реализуется за счет сйязи по
п тгР ткению с выхода третьего сумматора 11 , которая через мас1итабиру1ощий ycnjniTHjTb 14 поступает на третий вход первого сумматора 4. При этом запаздывание, вносимое контуром тока на. гпузочной машины 2, может быть ком- гс-нсировано путем введения связи по грпизводной от упругого момента ML., которая реализуется за счет соединения входа пропорционального усилитер ля 15 с выходом второго сумматора 9, а выхода с вторым входом первого сумматора 4. Коэффициент передачи пропорционального усилителя 15 рекомендуется выбирать равным
5
55
. мч
где К - коэффициент передачи пропор- ;i -шального уси1П1теля 15;
- малая некомпенсированная
постоянная времени контура тока иаг рузочной машины; Т - постоянная времени жесткости упругой передачи; ,5-2 - коэффициент, с помощью которого можно менять демпфирование моделируемого упруго- го механизма.
Для моделирования механической постоянной времени первой массы, включающей в себя механические постоянные времени самого двигателя и жест- ко связанной с яим первой массы моделируемого механизма, а также механическую постоянную времени только самого электродвигателя, на первый вход первого сумматора 4 подается сигнал с выхода блока 16 выделения статического момента, на четвертый вход первого сумматора 4 поступает сигнал с выхода регулятора скорости двигателя, который пропорционален полному о .еч- ту двигателя. Таким образом, из слт- напов, поступающие на первйй и четвертый вход первого сумматора 4, формируется сигнал, пропорциональный динамической составляющей момента двига- теля. В€1личина моделируемой механической постоянной времени регулируется коэффициентом на четвертом входе сумматора 4 и определяется следующим
образом
Ml
Т;д - механическая постоянная времени первой массы;
Т . - механическая постоянная вре- MI
мени установки (двигателя
и нагрузочной машины). Сигнал с выхода первого сумматора 4 далее поступает на регулятор 5 нагрузочного момента, который служит для компенсации противо-ЭДС нагруэоч ной и инерционности якорной цепи, а затем на вход тиристорного jпреобразователя 6, который питает якорную цепь нагрузочной машин 2,
ормула
6
изо
б р
g
j 0 5 0
5
0
,
Устройство для испыт,111 : -I UM г; - приводов, содержащее нагрузо шую шину, предназначенную для устанояки на вал электродвигателя испытуемого электропривода, выполненного но системе подчиненного регулироппния, тл- хогенератор нагрузочной Ma::ini L.i, вый сумматор, первым входом с( : и- с выходом регулятора CKOJV ci и-, пытуемого электроприво;1л, п -:;.ix : м подключенный через регулятор нлг) . - ЗОЧ1ДОГО момента к сходу тирис преобразователя, к ныхолу которо присоединена через ;;::i4i::. ii : i ная обмотка нагрузочной машины, iu:i- ход датчика тока соединен с вторым входом регулятора нагрузочног о момента, третий вход которого соединен с вьпчодом тахогенератора и «ходом блока модели механизма, состоящей из последовательно соединенн)1х второго сумматора, первого интегратора, : ретьп п сумматора, второго интегратора, инвертора, выход которого соединен с вторым входом второго сумматора, выход второго сумматора соединен с вторым входом третьего сумматора, БЫХОД которого соединен через масштабирующий усилитель с вторым входом первого сумматора, о т л и ч а ю щ е е - с я тем, что, с целью paci;inpe iim функциональН1;ГХ возможностей устройства, в него дополнительно тзпедепы пропорциональный ус11литель, блок- выделения Статического моментгг, Т1эи входа которого соответственно соединены с выходом датчика-тока нагрузочной мл- шин1,1, выходом тахогенератора, выходом датчика тока двигателя иcпытye o- го электропривода постоянного тока, выход блока, выделения статическог о момента соединен с третьим входом первого сумматора, четверты; вход которого через пропорциональныГг усилитель соединен с выходом второго су шатора блока модели механизма.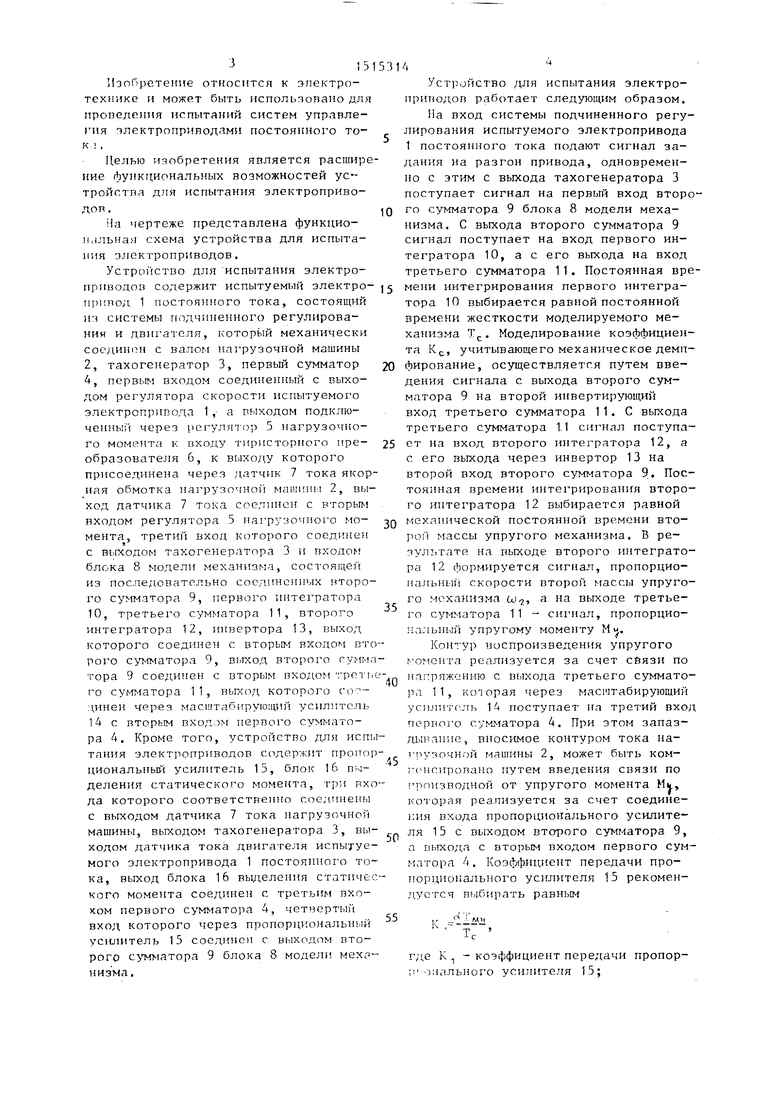
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания электропривода с упругой механической передачей от двигателя к механизму | 1981 |
|
SU1000950A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Стенд для испытания двух взаимосвязанных электроприводов | 1980 |
|
SU957137A1 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
| Стенд для испытания электрических исполнительных механизмов | 1987 |
|
SU1499141A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
Изобретение относится к электротехнике и может быть использовано для проведения испытаний систем управления электроприводами постоянного тока. Целью изобретения является расширение функциональных возможностей устройства для испытания электроприводов. Устройство содержит испытуемый электропривод 1, нагрузочную машину 2, регулятор 5 нагрузочного момента, тиристорный преобразователь 6 и блок 8 модели механизма, выход которого соединен с входом регулятора 5 нагрузочного момента, выход которого соединен со входом тиристорного преобразователя 6, к выходу тиристорного преобразователя 6 подключена якорная обмотка нагрузочной машины 2, вал которой механически соединен с валом двигателя испытуемого электропривода 1. В данном устройстве обеспечивается формирование различного вида и величины нагрузочного момента, расширение функциональных возможностей и повышение точности работы за счет того, что устройство позволяет моделировать автоматическую систему управления электроприводом сложных электромеханических объектов, характеризующихся наличием первой инерционной массы механизма, жестко связанной с двигателем, а также механизмы, характеризующиеся упругой связью между двигателем и первой массой механизма. При необходимости устройство может моделировать чисто инерционную нагрузку за счет отключения контура моделирования упругого момента. 1 ил.