Изобретение относится к радиотехнике и может найти применение в средствах связи.
Известно устройство синхронизации, описанное в патенте РФ №141688, H04L 7/02 «Устройство установления тактовой синхронизации по информационному составному последовательному сигналу», недостатком которого является значительная сложность и недостаточно высокая точность синхронизации.
Известно устройство синхронизации, описанное в патенте РФ №2232479, H04L 27/22 «Система и способ устранения ошибки синхронизации символа и ошибки по частоте несущей в системе цифрового радиовещания ОЧУ, недостатком которого является недостаточно высокая точность синхронизации.
Известен способ синхронизации, описанный в патенте РФ №2538281, G08C 19/28 «Способ синхронизации передаваемых сообщений», у которого недостаточно высокая точность синхронизации и большое время синхронизации.
Известны способ и устройство синхронизации, описанные в патенте РФ №2591565, H04J 3/06 «Способ синхронизации передаваемых сообщений и устройство для его реализации» недостатком которых является значительная сложность, недостаточно высокая точность синхронизации и большое время синхронизации.
В учебном пособии «Основы теории радиотехнических систем. Учебное пособие. // В. И. Борисов, В. М. Зинчук, А. Е. Лимарев, Н. П. Мухин. Под ред. В. И. Борисова. Воронежский научно-исследовательский институт связи, 2004», стр. 206 - 207» рассматривается две типовые структурные схемы синхронных систем радиосвязи: с передачей опорного сигнала по отдельному каналу связи (рис.7.1а) и с формированием опорного сигнала на приемной стороне (рис.7.1б). Первый обладает очевидными недостатками – повышенными весовыми и габаритными характеристиками приемного устройства, а также необходимостью организации отдельного канала для передачи опорного сигнала, что в современных условиях зачастую затруднено. Вследствие более эффективного использования канала связи в настоящее время наибольшее применение находят синхронные системы радиосвязи с формированием опорного сигнала.
При этом под полной синхронизацией понимается, что действующий на входе приемника системы радиосвязи кодированный сигнал точно синхронизирован по началу кодовой последовательности и частоте следования ее двоичных символов.
Известно множество устройств, реализующих поисковый и беспоисковый методы синхронизации в системах с формированием опорного сигнала. Устройства, реализующие поисковый метод фазовой и тактовой синхронизации строятся на основе системы фазовой автоподстройки частоты (ФАПЧ). Например, петля Костаса используется для восстановления фазированной несущей для двухполосной системы с подавленной несущей, а также для демодуляции фазоманипулированных сигналов (BPSK, QPSK) (Прокис Джон. Цифровая связь. Пер. с англ. / Под ред. Д.Д. Кловского - М.: Радио и связь. 2000. стр. 302-303). Основанные на петле Костаса устройства имеют недостатки, связанные с неоднозначностью фазы на 180º, а также с инерционностью петлевого фильтра.
Наиболее близким аналогом по технической сущности к предлагаемому является способ синхронизации символов, реализуемый устройством, описанным в учебном пособии «Основы теории радиотехнических систем. Учебное пособие. // В. И. Борисов, В. М. Зинчук, А. Е. Лимарев, Н. П. Мухин. Под ред. В. И. Борисова. Воронежский научно-исследовательский институт связи, 2004», стр. 222 - 223», принятый за прототип.
Способ-прототип заключается в следующем.
Усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз (времени), получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве, и его усреднения. После чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума. После того, как процесс синхронизации завершают, начинают процесс обработки принимаемых информационных символов.
Недостатком данного способа является достаточно большое время снижения ошибки рассогласования, что обусловлено тем, что способ-прототип реализован по принципу слежения путем использования аналогового замкнутого контура. При этом для повышения точности необходимо значительно увеличивать время усреднения напряжения ошибки.
Задача предлагаемого способа – снижение времени синхронизации.
Для решения поставленной задачи в способе адаптивной синхронизации символов, заключающемся в том, что усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз/времени, получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве, и его усреднения, после чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума – режим слежения за фазой, согласно изобретению, значения напряжения ошибки дискретизируют для всего возможного диапазона их изменений; в течение начального интервала времени Тн с использованием измеренных значений напряжений ошибки рассчитывают условные плотности распределения значений напряжения ошибки, которое оно примет через некоторое установленное время t2, при условии, что в текущий момент времени значение напряжения ошибки принадлежит одному из интервалов, которые получают при его дискретном представлении; для каждого значения напряжения ошибки определяют значение напряжения, которое оно примет через установленное время t2 с наибольшей вероятностью; после чего используют циклическое управление, при этом каждый цикл состоит из двух шагов: первый шаг – в случае, если текущее значение напряжения ошибки превышает пороговое значение, то определяют значение напряжения с максимальным значением вероятности его появления через установленное время t2 от момента измерения напряжения ошибки, и формируют соответствующее управляющее напряжение; второй шаг – через время, необходимое для определения значения напряжения ошибки, формируют с использованием найденного значения напряжения ошибки управляющее напряжение, и осуществляют работу в режиме слежения за фазой принимаемых символов: усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз/времени, получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве, и его усреднения, после чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума, до момента, когда текущее значение напряжения ошибки превысит пороговое значение, после чего переходят к первому шагу.
Предлагаемый способ заключается в следующем.
Осуществляют дискретизацию значений напряжения ошибки для всего возможного диапазона их изменений.
Дискретное представление значений напряжения ошибки осуществляют путем деления диапазона их изменения на N равных отрезков.
Дискретное значение напряжения ошибки принимают равным значению середины соответствующего отрезка.
Число, на которое разбивают интервал значений напряжения ошибки, определяют на этапе разработки экспериментальным путем или методом математического моделирования как значение, обеспечивающее заданный уровень точности синхронизации за минимальное время.
В течение начального интервала времени (Тн), рассчитывают условные плотности распределения вероятности того, что значение напряжения ошибки через время t2, примет одно из заранее определенных значений, установленных при его дискретном представлении, при условии, что в текущий момент времени напряжение ошибки соответствует одному из установленных дискретных значений.
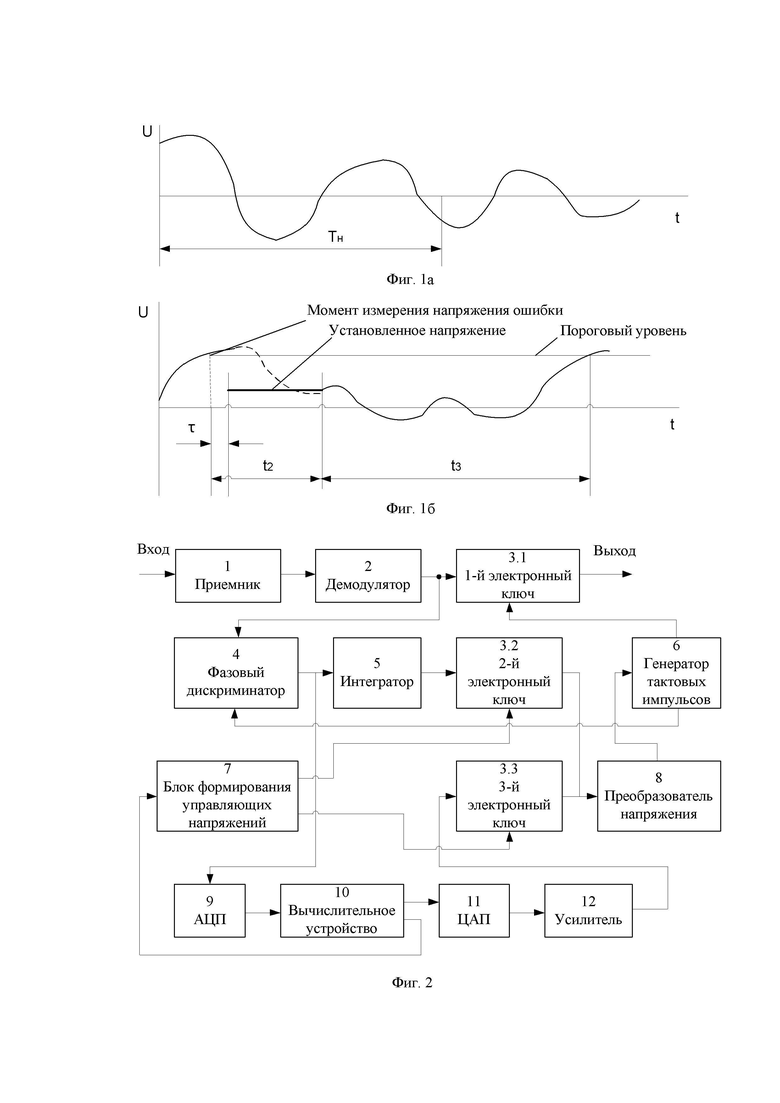
Иллюстративное пояснение работы способа приведено на фиг. 1.
Условные плотности распределения рассчитывают любым известным способом, например, методом построения гистограмм (см., например, Е.С. Вентцель «Теория вероятностей», М. 1969, стр. 136 – 138).
Значение временного интервала, в течение которого набирают статистку, достаточную для построения гистограмм, определяют на этапе разработки экспериментальным путем или методом математического моделирования как значение, обеспечивающее заданный уровень точности синхронизации.
Для каждого значения напряжения ошибки определяют значение напряжения, которое оно примет в следующий момент времени (t2) с наибольшей вероятностью.
После чего переходят в режим циклической работы, при этом каждый цикл состоит из двух шагов.
Первый шаг:
– определяют текущее значение напряжения ошибки;
– в случае если это значение превышает заранее установленное пороговое значение, с использованием рассчитанных в начальный интервал времени (Тн) значений, выбирают значение, которое оно примет в момент времени t2 с наибольшей вероятностью;
Второй шаг:
– через время, необходимое для определения значения напряжения ошибки – τ, формируют с использованием найденного значения напряжения ошибки управляющее напряжение так же, как в способе-прототипе, и осуществляют работу в режиме слежения за фазой принимаемых символов по алгоритму, который используется в способе-прототипе: усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз (времени), получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве, и его усреднения, после чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума.
Работу в режиме слежения за фазой принимаемых символов осуществляют, до момента, когда текущее значение напряжения ошибки превысит пороговое значение. После чего переходят к первому шагу.
Структурная схема устройства, реализующего предлагаемый способ, приведена на фиг. 2, где обозначено:
1 – приемник;
2 – демодулятор;
3.1, 3.2, 3.3 – с первого по третий электронные ключи, соответственно;
4 – фазовый дискриминатор;
5 – интегратор;
6 – генератор тактовых импульсов (ГТИ);
7 – блок формирования управляющих напряжений (БФУпН);
8 – преобразователь напряжения;
9 – аналого-цифровой преобразователь (АЦП);
10 – вычислительное устройство (ВУ);
11 – цифро-аналоговый преобразователь (ЦАП);
12 – усилитель.
Устройство, реализующее предлагаемый способ содержит последовательно соединенные приемник 1, демодулятор 2 и первый электронный ключ 3.1, выход которого является выходом устройства. При этом выход демодулятора 2 соединен с первым входом фазового дискриминатора 4, выход которого через последовательно соединенные интегратор 5, второй электронный ключ 3.2, преобразователь напряжения 8 и генератор тактовых импульсов 6 подсоединен ко второму входу первого электронного ключа 3.1. Кроме того, второй выход генератора тактовых импульсов 6 подключен ко второму входу фазового дискриминатора 4, выход которого через последовательно соединенные АЦП 9, вычислительное устройство 10, ЦАП 11, усилитель 12 соединен с первым входом третьего электронного ключа 3.3, выход которого соединен с входом преобразователя напряжения 8. Причем второй выход вычислительного устройства 10 соединен с входом блока формирования управляющих напряжений 7, первый выход которого соединен со вторым входом второго электронного ключа 3.2, а второй выход БФУпН 7 соединен со вторым выходом третьего электронного ключа 3.3. Вход приемника 1 является входом устройства.
Устройство работает следующим образом.
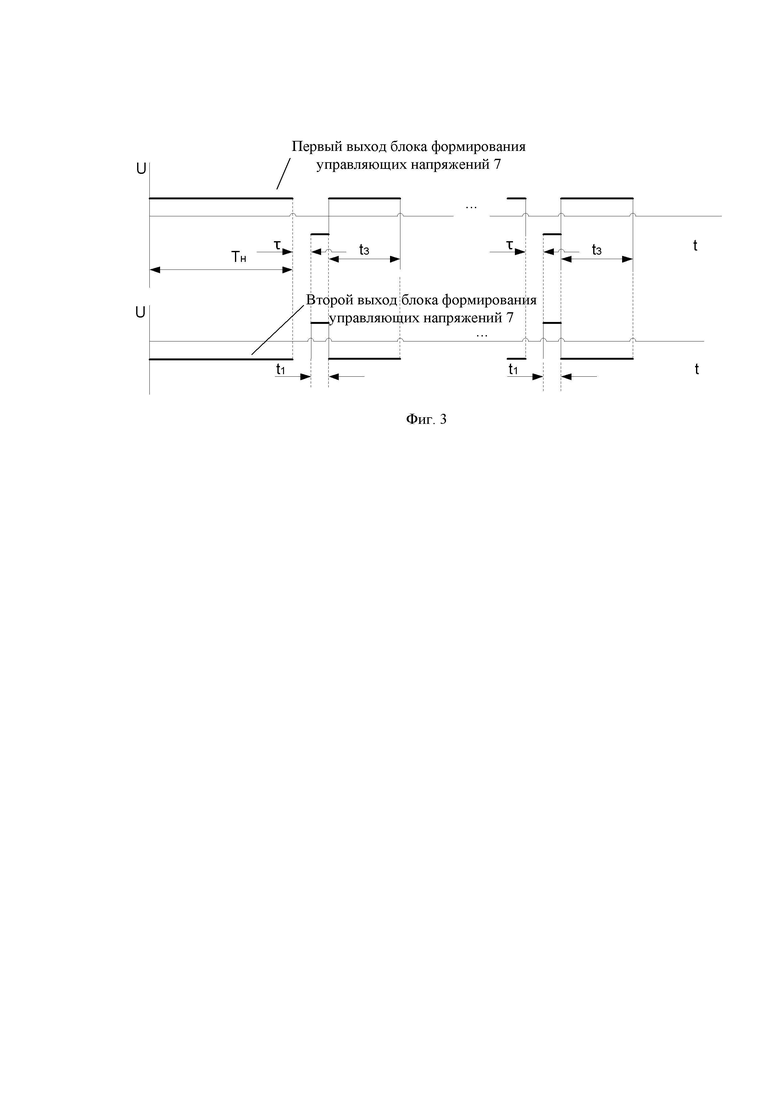
В начальный момент времени в блоке формирования управляющих напряжений 7 формируют импульс установленной заранее длительности (Тн) и амплитуды. Эпюры напряжений, поступающих на выходы БФУпН 7, приведены на фиг. 3.
Напряжение с первого выхода БФУпН 7 подается на второй вход второго электронного ключа 3.2 и открывает его. Напряжение со второго выхода БФУпН 7 подается на второй вход третьего электронного ключа 3.3 и закрывает третий электронный ключ 3.3.
В этом случае устройство работает в режиме слежения за фазой, а именно. Сигнал с приемника 1 подается в демодулятор 2. После демодуляции сигнал поступает в фазовый дискриминатор 4, на второй вход которого подаются сигналы с ГТИ 6, управляемого напряжением. Фазовый дискриминатор 4 вырабатывает напряжение, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз (времени) между тактовыми импульсами ГТИ 6 и принимаемыми символами. Это напряжение усредняют в интеграторе 5 и формируют с его использованием управляющее напряжение в преобразователе напряжения 8 таким образом, чтобы рассогласование фаз уменьшилось до минимума. На выход первого электронного ключа 3.1 поступает сигнал в моменты времени, когда его открывают импульсы, подаваемые с ГТИ 6.
Преобразователь напряжения 8 выполнен в виде устройства преобразующего напряжение, которое изменяется в пределах от U1 до U2, в напряжение, которое изменяется соответственно в пределах от U3 до U4.
Поступающее на вход преобразователя напряжения 8 напряжение ошибки преобразуют следующим способом
y= k1(x) x, (1)
т.е.: y1=k1 x1, y2=k2 x2, … , yn=kn xn,
где n – число используемых градаций напряжения ошибки.
В течение начального интервала времени (Тн) в вычислительном устройстве 10, способом, описанным выше, осуществляют расчет условных плотностей распределения значений напряжения ошибки, которое оно может принять через время t2, при условии, что в текущий момент времени напряжение ошибки принадлежит одному из интервалов, которые получают при дискретном представлении напряжения ошибки.
После завершения процесса расчета условных плотностей распределения для каждого значения напряжения ошибки определяют значение напряжения, которое оно примет через время t2 с наибольшей вероятностью.
После истечения интервала времени Тн устройство переходит в режим циклической работы, при этом каждый цикл состоит из двух шагов.
Первый шаг.
В вычислительном устройстве 10, в случае если текущее значение напряжения ошибки превышает заранее установленное пороговое значение, из рассчитанных значений выбирают значение напряжения ошибки, которое оно примет через установленное время (t2) с наибольшей вероятностью.
Соответствующее напряжение через время τ, необходимое для определения значения напряжения ошибки, подают со второго выхода вычислительного устройства 10 на вход БФУпН 7, где формируют управляющее напряжение соответствующего уровня, которое подают с первого выхода БФУпН 7 на второй вход второго электронного ключа 3.2 и, тем самым, закрывают его. Также в БФУпН 7 формируют напряжение соответствующего уровня длительностью (t2-τ) и подают его со второго выхода БФУпН 7 на второй вход третьего электронного ключа 3.3 и, тем самым, открывают его.
Значение напряжения ошибки в цифровой форме, которое оно примет через время t2, с наибольшей вероятностью, с вычислительного устройства 10 подают на ЦАП 11, где преобразуют его в аналоговый вид, усиливают его до необходимого уровня в усилителе 12, и подают на первый вход третьего электронного ключа 3.3. Через открытый третий электронный ключ 3.3 напряжение поступает в преобразователь напряжения 8, где оно преобразуется соответствующим образом. Преобразованное в преобразователе напряжения 8 напряжение ошибки подают на ГТИ 6.
Второй шаг.
Через время τ от момента, в который напряжение ошибки превысило заранее установленное пороговое значение, устройство осуществляет работу в режиме слежения за фазой принимаемых символов до момента (t3), когда текущее значение напряжения ошибки в очередной раз превысит пороговое значение.
При этом в БФУпН 7 формируют напряжение соответствующего уровня и подают его на второй вход второго электронного ключа 3.2. Этим напряжением открывают второй электронный ключ 3.2. В тот же момент времени в БФУпН 7 формируют напряжение соответствующего уровня, подают его на второй вход третьего электронного ключа 3.3 и, тем самым, закрывают его.
После чего цикл повторяется.
При этом считается, что интервал времени τ, необходимый для вычисления значения, которое напряжение ошибки примет в следующий момент времени с наибольшей вероятностью, значительно меньше интервалов времени t2 и t3, поскольку при использовании N градаций напряжения ошибки для этого потребуется 2N элементарных операций, что при тактовой частоте 10-9 Гц составит доли микросекунд.
Таким образом, при условии, что длительность интервала времени t2, соизмерима с временем работы в режиме слежения за фазой t3, время синхронизации сокращается практически вдвое.
АЦП 9 может быть выполнен, например, на микросхеме AD7495BR фирмы Analog Devices.
Вычислительное устройство 10 может быть выполнено, например, на микросхеме TMS320VC5416 фирмы Texas Instruments.
ЦАП 11 может быть выполнен, например, на микросхеме AD9957BSVZ фирмы Analog Devices.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство адаптивной синхронизации символов | 2020 |
|
RU2735494C1 |
| Устройство стохастической синхронизации символов | 2018 |
|
RU2696553C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМНИК С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ ДЛЯ ПРИЕМА КВАДРАТУРНО-МОДУЛИРОВАННЫХ СИГНАЛОВ ПОВЫШЕННОЙ СТРУКТУРНОЙ СКРЫТНОСТИ | 2013 |
|
RU2544767C1 |
| Многоканальный приемник с кодовым разделением каналов для приема квадратурно-модулированных сигналов повышенной структурной скрытности | 2016 |
|
RU2610836C1 |
| Способ противодействия системам извлечения информации, передаваемой средствами радиосвязи | 2021 |
|
RU2760978C1 |
| Многоканальный приемник с кодовым разделением каналов для приема сигналов с квадратурной m-ичной амплитудно-инверсной модуляцией | 2017 |
|
RU2669371C1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| Способ противодействия системам извлечения информации, осуществляющим распознавание индивидуальной структуры сигналов, путем искажения формы сигнала | 2021 |
|
RU2774743C1 |
| УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПО ФАЗОМАНИПУЛИРОВАННОМУ СИГНАЛУ | 1993 |
|
RU2084080C1 |
| Радиостанция, обеспечивающая противодействие системам извлечения информации | 2021 |
|
RU2758499C1 |
Изобретение относится к способу адаптивной синхронизации символов, применяемому в системах связи. В способе усредненное напряжение пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз (времени), получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве и его усреднения. Далее с использованием усредненного напряжения пропорционального рассогласованию фаз (напряжение ошибки) формируют управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума. В течение начального интервала времени (Тн) с использованием измеренных значений напряжений ошибки рассчитывают условные плотности распределения значений напряжения ошибки, которое оно примет через некоторое установленное время. На первом шаге для текущего значения напряжения ошибки в зависимости от его значения формируют управляющее напряжение. Затем осуществляют работу в режиме слежения за фазой до момента, когда текущее значение напряжения ошибки превысит пороговое значение, после чего переходят к первому шагу. Техническим результатом является снижение времени синхронизации. 3 ил.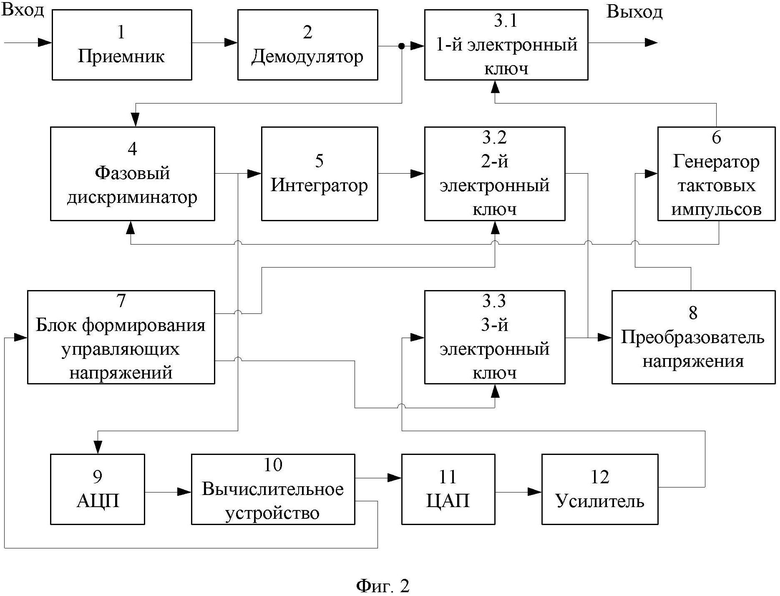
Способ адаптивной синхронизации символов, заключающийся в том, что усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз/времени, получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве и его усреднения, после чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума - режим слежения за фазой, отличающийся тем, что значения напряжения ошибки дискретизируют для всего возможного диапазона их изменений; в течение начального интервала времени Тн с использованием измеренных значений напряжений ошибки рассчитывают условные плотности распределения значений напряжения ошибки, которое оно примет через некоторое установленное время t2, при условии, что в текущий момент времени значение напряжения ошибки принадлежит одному из интервалов, которые получают при его дискретном представлении; для каждого значения напряжения ошибки определяют значение напряжения, которое оно примет через установленное время t2 с наибольшей вероятностью; после чего используют циклическое управление, при этом каждый цикл состоит из двух шагов: первый шаг - в случае, если текущее значение напряжения ошибки превышает пороговое значение, то определяют значение напряжения с максимальным значением вероятности его появления через установленное время t2 от момента измерения напряжения ошибки и формируют соответствующее управляющее напряжение; второй шаг - через время, необходимое для определения значения напряжения ошибки, формируют с использованием найденного значения напряжения ошибки управляющее напряжение и осуществляют работу в режиме слежения за фазой принимаемых символов: усредненное напряжение, пропорциональное рассогласованию между текущим значением фазы и его оценкой, знак и амплитуда которого пропорциональна знаку и величине рассогласования фаз/времени, получают путем сравнения сигнала после его демодуляции с тактовыми импульсами в соответствующем устройстве и его усреднения, после чего формируют с его использованием управляющее напряжение таким образом, чтобы рассогласование фаз уменьшилось до минимума, до момента, когда текущее значение напряжения ошибки превысит пороговое значение, после чего переходят к первому шагу.
| Термостатический парожидкостный бескапиллярный регулятор | 1961 |
|
SU141688A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2012 |
|
RU2538281C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2591565C1 |
| WO 2005086408 A1, 15.09.2005 | |||
| US 6982994 B2, 03.01.2006 | |||
| Борисов В.И | |||
| и др., Основы теории радиотехнических систем | |||
| Учебное пособие | |||
| Воронежский научно-исследовательский институт связи, 2004, стр | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
| J | |||
| T | |||
| Astola et al., Novel noise resistant | |||

