Изобретение относится к телеметрии, радиотехническим системам измерений, технике связи и может быть использовано для обеспечения синхронизации передаваемых и принимаемых сообщений и сигналов в условиях помех за минимальное время.
Известно ([1], «Современная телеметрия в теории и на практике / Учебный курс», Спб.: Наука и Техника, 2007. - 672 с, стр.469), что характеристики системы синхронизации зависят от следующих факторов:
- выбранной последовательности цифровых сигналов (при двоичном коде от кодовой комбинации, составленной из символов «1» и «0»), которые используются в качестве сигналов синхронизации;
- от соотношения k длительности кодовых комбинаций сигнала синхронизации (kn) к длине n кодовых комбинаций передаваемых сообщений (в телеметрических системах слов-измерений);
- от отношения числа символов kn, входящих в цифровой синхросигнал к общему количеству символов кода т, составляющих цикл (кадр) передаваемых сообщений (m=Kn).
Короткие цикловые синхросигналы являются наилучшими с точки зрения обеспечения минимального среднего времени обнаружения выхода из синхронизма, поэтому наиболее часто k выбирают равным 3 (k=3). Однако при уменьшении числа символов kn синхросигнала увеличивается вероятность установления режима «ложного синхронизма», так как при этом увеличивается вероятность случайной или целенаправленной имитации кодовых конструкций, похожих на синхросигнал. При длинных цикловых синхросигналах (больших kn) вероятность правильного обнаружения и выделения синхросигналов повышается, однако уменьшается объем передаваемых информационных символов, определяемый соотношением ν=m-kn. В условиях помех также появляются искажения, связанные со смещениями выделенных сигналов синхронизации. Такая ситуация, например, появляется в том случае, когда анализируемая кодовая группа содержит часть «правильного» синхросигнала. Чаще всего, подобная ситуация может возникнуть при добавлении к истинной кодовой группе синхросигнала следующего «случайного» символа. В этом случае происходит частичное перекрытие синхросигнала. Подобные ситуации возникают и при других степенях частичного перекрытия, когда временное положение выделенного синхросигнала смещается не на один, а на несколько символов. В результате ухудшается точность установления моментов времени, соответствующих принятому сигналу синхронизации.
Известен способ ([1]), в котором для уменьшения вероятности имитации сигнала синхронизации, под которой понимается вероятность того, что в передаваемом телеметрическом кадре будет найдена не одна, а несколько кодовых комбинаций заданной длины kn, используют в качестве синхрослов последовательности, состоящие из одноименных символов «1» или «0» двоичного кода. Такой выбор связан с тем, что вероятность имитации в телеметрическом кадре второй такой кодовой последовательности за счет действия помех будет наименьшей при случайном выборе в принимаемом цифровом групповом сигнале (ЦГС) кодовой комбинации, имеющей длину kn. Однако при этом наблюдают высокую вероятность частичного перекрытия синхросигнала, появляющегося в результате добавления к истинной кодовой группе синхросигнала в начале или в конце ее «случайного» одноименного символа «1» или «0». В этом случае появляется ошибка синхронизации, вызванная «сдвигом» идентифицированного синхросигнала относительно его истинного положения в кадре на один двоичный символ. Для того чтобы избавиться от ошибок такого типа переходят ко второму этапу установления истинного местоположения сигнала синхронизации в кадре. Для этого, например, в циклических системах передачи информации определяют временные интервалы между следующими подряд синхросигналами, выделенными при приеме передаваемых данных. Их троекратное совпадение считают достаточным для того, чтобы исключить ошибки синхронизации, вызванные «эффектом перекрытия».
Недостаток способа заключен в большой вероятности появления «эффекта перекрытия» и, как следствие этого, в высокой вероятности появления режима ложного синхронизма.
Существуют последовательности, которые считают «идеальными» с точки зрения уменьшения погрешностей идентификации синхросигналов, вызванных перекрытием. К их числу относятся коды Баркера ([2], И.М.Тепляков Радиотелеметрия. - М.: «Сов. радио», 1966. - 311 с., стр.211). Баркер нашел три «идеальные» последовательности из 3,7 и 11 символов: ПО, 1110010, 11100010010, обладающие наилучшими корреляционными свойствами. Автокорреляционные функции (АКФ) этих кодов имеют пик величиной kn и боковые отрицательные выбросы (лепестки), равные -1. Других кодов, не имеющих положительных боковых выбросов, не существует. Комбинируя коды Баркера, можно получить коды, имеющие АКФ с положительными боковыми выбросами не более+1. Это коды с числом символов N, равным: 3×7=21, 3×11=33 и 11×7=77. Других кодов, у которых при аналогичных N положительные боковые выбросы не превышают +1, также не существует.
Но в подавляющем большинстве случаев практического применения сложных сигналов необходимо, чтобы число символов в формируемой псевдослучайной последовательности (ПСП) было бы, во-первых, различным, а, во-вторых, существенно больше значения kn=77. Первое требование связано с расширяющимися задачами телеметрии и связи, второе относится к радиотехническим системам измерений.
Так, например, в спутниковых радионавигационных системах (СРНС) ГЛОНАСС используют М-последовательности различной длины L. Так, например, дальномерный код средней точности в СРНС ГЛОНАСС, называемый СТ-кодом, представляет собой короткую М - последовательность с L=511 символов. Такой выбор является компромиссным решением: он обеспечивает быстрый поиск дальномерного сигнала при определенной точности измерений дальности с соответствующей неоднозначностью ([3], Глобальная спутниковая радионавигационная система ГЛОНАСС/Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998. - с.399 - стр.142). Цикловую синхронизацию (ЦСХ), которая является предметом изобретения в новом расширенном ее толковании, ориентированном и на использование в области телеметрии и связи, обеспечивают спутниковой радионавигационной системой (СРНС) ГЛОНАСС с использованием укороченной 30-разрядной М-последовательности, которая получила название «код метки времени» ([3], стр.72, 143). Соответствующая ей 30-разрядная кодовая конструкция имеет следующий вид: 111110001101110101000010010110. В ней 16 символов «1» и 14 символов «0». Для того чтобы она отвечала свойствам настоящей (исходной) М-последовательности необходимо добавить 31 символ «0», в результате чего получим необходимое число символов «0», равное 15: 1111100011011101010000100101100. Поскольку в СРНС ГЛОНАСС после «кода метки времени» всегда следует кодовая комбинация служебной информации, которая начинается с символа «0», то этот символ «0», принадлежащий фактически другому сообщению, присоединяют к 30-разрядной укороченной М-последовательности. В результате такого искусственного приема получают исходную 31-разрядную М-последовательность, которую подвергают корреляционной обработке ([3], стр.143). Но при этом сохраняют исходную 10-разрядную структуру слов и последний символ «0» не передают, а восстанавливают перед обработкой за счет символа, который на самом деле принадлежит другому сообщению. Получается, что один и тот же символ «0» используется дважды и каждой раз по различному назначению. Такой прием предлагается использовать и в предлагаемом изобретении. Но принципиальное отличие в его использовании заключается в том, что дополнительное заимствование символа «0» производят внутри самого сигнала цикловой синхронизации (СЦС) (оно осуществляется между составными кодовыми конструкциями, из которых составлен исходный СЦС), а не между разными сообщениями.
Однако автокорреляционные свойства М-последовательности существенно хуже по сравнению с «идеальными» последовательностями Баркера. В то же время существуют жесткие противоречивые ограничения, предъявляемые к выбору цикловых синхросигналов. С одной стороны, это выбор значений L, отвечающих требованиям формирования М-последовательности, при которых обеспечивается минимум (в заданном классе формирования ПСП) выбросов боковых лепестков. С другой стороны, выбранное значение L должно не противоречить принятой структуре формирования слов-измерений и сообщений. Так, например, если выбрана структура представления результатов измерений 10-разрядными словами, то тогда и сигнал синхронизации также должен иметь структуру 10-разрядных слов. По этой причине в СРНС ГЛОНАСС выбрана укороченная 30-разрядная М-последовательность, у которой автокорреляционная функция хуже, чем у настоящей 31-разрядной ее копии. У первой из них максимальный положительный выброс бокового лепестка составляет 16,6% относительного основного пика автокорреляционной функции (АКФ), а у второй - 12,9%.
Поэтому одна из задач изобретения заключается в том, чтобы предложить способ генерации псевдослучайных последовательностей (ПСП) с заданным количеством символов, автокорреляционные свойства которых были бы лучше по сравнению с М-последовательностями, а также по сравнению с другими ПСП длины N=kn, которые до сих пор считались оптимальными. Еще одно требование состоит в том, чтобы их корреляционные свойства могли бы быть предсказаны аналитически, поскольку до сих пор проблемно-ориентированный выбор наиболее предпочтительной ПСП производился на основе перебора с использованием ЭВМ различных кодовых конструкций с последующим построением АКФ и выбора по ним лучших.
Возможность аналитического построения ПСП с наилучшими корреляционными свойствами для N>11 продемонстрировал Баркер - это коды с числом символов N, равным: 3×7=21, 3×11=33 и 11×7=77, где 3,7 и 11 - это число N «идеальных» кодов. Особенность предложенного им подхода заключалась в том, что синтезированные Баркером новые кодовые конструкции с заданными корреляционными свойствами были составные. Например, код с числом символов N=21 состоял из трех семиразрядных ПСП Баркера: <1110010>2=<+++- -+->зн, которые следовали друг за другом в соответствии законом, определяемым кодом Баркера для N=3:<110>2=<++->зн. В результате составной код для N=21 состоял из трех кодовых конструкций (KKi, i=1,2,3), каждая из которых представляла код Баркера с N=7, при этом полярность символов кода задавалась другим кодом Баркера для N=3:<++->зн:

В предлагаемом изобретении новое синхрослово также состоит из отдельных кодовых конструкций, объединенных в единую систему (синхрослово, систему сигналов). При этом каждую из составных кодовых конструкций выбирают таким образом, чтобы устранить существующие противоречия при выборе СС. Одно из них заключается в том, что выбор СС в виде N-разрядной кодовой конструкции, состоящей из одноименных символов «1», обеспечивает наименьшую вероятность случайной имитации СС за счет информационных символов, из которых состоит цикл (кадр) и помех, однако при этом наблюдается самая большая вероятность ложного синхронизма из-за случайного присоединения к N-разрядному СС символа «1», который принадлежит информационной части цикла или кадра (вероятность перекрытия). Второй наиболее распространенный подход предполагает использование в качестве СС М-последовательности. При этом вероятность перекрытия минимальна, но вероятность случайной имитации СС за счет информационных символов цикла или кадра существенно выше по сравнению с первым подходом. Так, например, относительная вероятность имитации оптимального СС <0000100111010111>2 c N=16, приведенного в ([4], Былински П., Ингрем Д. Цифровые системы передачи: Пер. с анг. / Под ред. А.А.Визеля. - М.: Связь, 1980. - 360 с., стр.112), равна Rt=0,4202.
Новизна предлагаемого способа заключена также и в организации обработки СС при его приеме на фоне помех. Она предполагает, что, помимо общей корреляционной обработки самого СС, параллельной обработке подвергают и его составные части с тем, чтобы преимущества компенсировали недостатки, относящиеся к каждой из них.
Известен способ параллельной обработки М-последовательности большой длины N (N=kn), при котором принятая М-последовательность разбивается на неперекрывающиеся сегменты, имеющие длину Nc ([5], Шумоподобные сигналы в системах передачи информации /Под ред. проф. В.Б.Пестрякова. - М.: «Сов. радио», 1973.- 424 с.- стр.129). Их число ic определяется соотношением: ic=N./(Nc.-1). Однако автокорреляционные свойства сегментов М-последовательностей оказываются значительно хуже, чем у М-последовательностей той же длины и зависят от Nc ([5], с.129). Поэтому такой способ может быть использован только для повышения оперативности выделения сложных псевдослучайных сигналов. Его применение может быть оправдано при больших значениях N, например, при N=219-1=524 287 при длительностях сегментов Nc=127.
В то же время для решения задачи синхронизации в телеметрических системах и системах передачи данных, у которых длина N мала, такой прием неприемлем. У одной из бортовых радиотелеметрических систем (БРТС) «ОРБИТА-IVMO», которую относят к лучшим образцам отечественной техники, для синхронизации телеметрических кадров используют М-последовательность с N=kn=15. Такой выбор продиктован байтовой структурой слов-измерений, составляющих основу регистрации и обработки получаемой ТМИ с использованием современной вычислительной техникой (ВТ), как бортовой в виде микроконтроллеров, так и наземной на основе ПЭВМ.
При этом по многим другим соображениям, в том числе и из-за высокой скорости передачи телеметрической информации (ТМИ), синхросигнал с большим количеством N не может быть выбран. Недостаток существующей обработки СС, представленного в виде М-последовательности, заключен в том, что дополнительный символ «0», который дополняет ее до байтовой структуры данных, не используется в процессе корреляционной обработки. В отличие от предложения, которое используется в СРНС ГЛОНАСС ([3], стр.143), при котором символ «0» не передают, а заимствуют из другого сообщения, в принятой в телеметрии практике имеет место обратная ситуация: его, наоборот, передают, но не используют при приеме.
При обработке используют также различные методы поиска сигналов синхронизации, обеспечения контроля синхронизма, выбор которых определяется компромиссом между сложностью аппаратуры и характеристиками, которые разработчик считает допустимыми ([2], стр.201 - 212, [4], стр.99-114).
Известен способ цикловой синхронизации передаваемых сообщений в системах передачи информации с временным уплотнением каналов ([1]), заключающийся в том, что в качестве синхросигналов выбирают М-последовательность, содержащую в соответствии с условиями ее формирования М=2p-1=(kn-1) двоичных символов, дополняют М-последовательность до значения kn, кратного m, дополнительным избыточным двоичным символом «0» или «1», при этом до полного восстановления синхронизма операции поиска синхронизации и контроля выполнения условий синхронизма последовательно чередуют, для чего всю последовательность принятых данных делят на блоки, состоящие из т символов каждый, а в каждом из выделенных блоков определяют местонахождение kn-разрядного синхросигнала с заранее известной структурой следования символов, определяют временные интервалы между сигналами, идентифицированными на фоне помех, как синхронизирующие последовательности, при последовательном равенстве не менее трех из них, формируют сигнал установления синхронизма, который используют для разделения временных интервалов, соответствующих передаче сообщений заранее известных датчиков (источников информации).
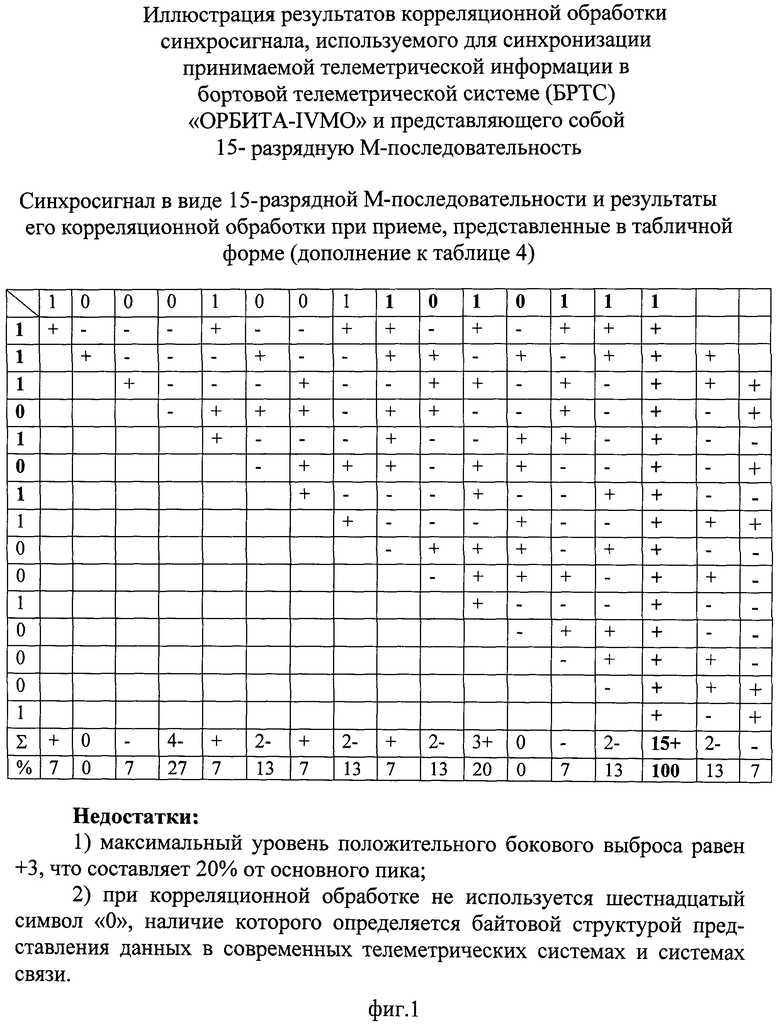
Пример СС в виде 15-разрядной М-последовательности приведен в таблице 1.
М-последовательность, приведенную в таблице 1, используют в качестве синхросигналов в бортовой радиотелеметрической системе (БРТС) «ОРБИТА-IVMO».
Результаты корреляционной обработки данной М-последовательности при ее приеме представлены на фиг.1.
Недостаток данного способа заключен в том, что при стандартной байтовой структуре представления данных появляется необходимость введения дополнительного 16-го избыточного символа. Но при существующем подходе к корреляционной обработке М-последовательности его не используют. Другой недостаток состоит в том, что вероятность случайной имитации М-последовательности при заданном kn существенно выше по сравнению с представлением СС в виде kn одноименных двоичных символов «1» или «0».
Технический результат состоит в следующем: в повышении вероятности обнаружения сигналов синхронизации при минимальном среднем времени вхождения в синхронизм, с одной стороны, и уменьшении вероятности установления режима ложного синхронизма за счет признания кодовой комбинации в качестве синхросигнала, в то время как она таковой не является.
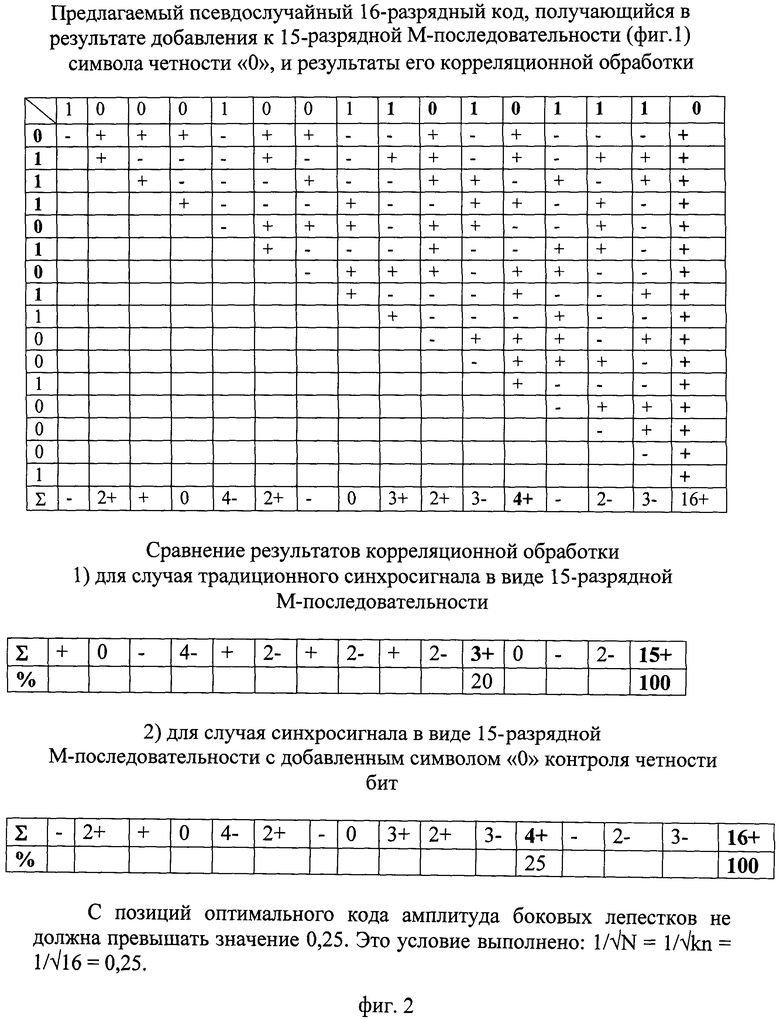
В предлагаемом способе корреляционной обработке подвергают М-последовательность, дополненную символом четности бит «0». Необходимость такого решения обусловлена следующими причинами:
требованиями международных стандартов CCSDS, IRIG и др., предполагающих ориентацию на байтовую структуру представления сообщений, слов-измерений и слов синхронизации, соблюдение которых позволило бы исключить дополнительные проблемы при взаимодействии систем измерений и передачи информации с современными вычислительными комплексами, как бортовыми, так и наземными;
проведенными исследованиями, подтверждающими возможность синтеза слов синхронизации, удовлетворяющих свойствам оптимальности по уровню боковых лепестков при корреляционной обработке сформированной кодовой последовательности, в том числе ее составной части, являющейся М-последовательностью вдвое меньшей длины.
Для достижения отмеченного технического результата в предлагаемом изобретении в качестве основы синтеза синхрослов новой конструкции используют следующие два основных метода.
Первый заключается в том, что выбирают в качестве сигнала синхронизации последовательность двоичных символов, состоящую из kn одноименных символов «1» или «0», делят ее на две равные части, при этом первую половину из kn/2 символов оставляют в неизменном виде, состоящую из символов «1» или «0», а вторую заменяют инверсными символами, в первом случае «0», а во втором «1».
Пример наиболее распространенной кодовой конструкции СС для случая kn=16 (k=2, n=8) приведен в таблице 2.
Пример предлагаемой конструкции СС, полученной на основе первого способа, приведен в таблице 3.
В результате такого решения сохраняют наименьшее значение вероятности случайной имитации синхросигнала на основе других кодовых конструкций, входящих в состав цифрового группового сигнала (ЦГС) принятой информации. Кроме того, устраняют «эффект перекрытия» за счет добавления к истинному синхронизирующему слову (в его начале или в его конце) одноименных символов «0» или «1», которые на самом деле принадлежат другим информационным сообщениям в принятом и анализируемом ЦГС. Один из признаков достоверного опознания СС заключается в том, что при предлагаемом подходе будет обозначена граница середины СС в виде перехода от повторяющихся kn/2 символов «0» к повторяющимся kn/2 символам «1». При этом может быть сформирован пик (импульс перехода) от кодовой последовательности одной полярности, например отрицательной, соответствующей двоичным символам «0», к кодовой последовательности другой (положительной) полярности, соответствующей двоичным символам «1». При этом величина пика, совпадающего со сменой полярностей, будет определяться соотношением числа kn/4 накопленных (просуммированных) символов положительной полярности «1» и соответствующим числом kn/4 накопленных символов отрицательной полярности «0».
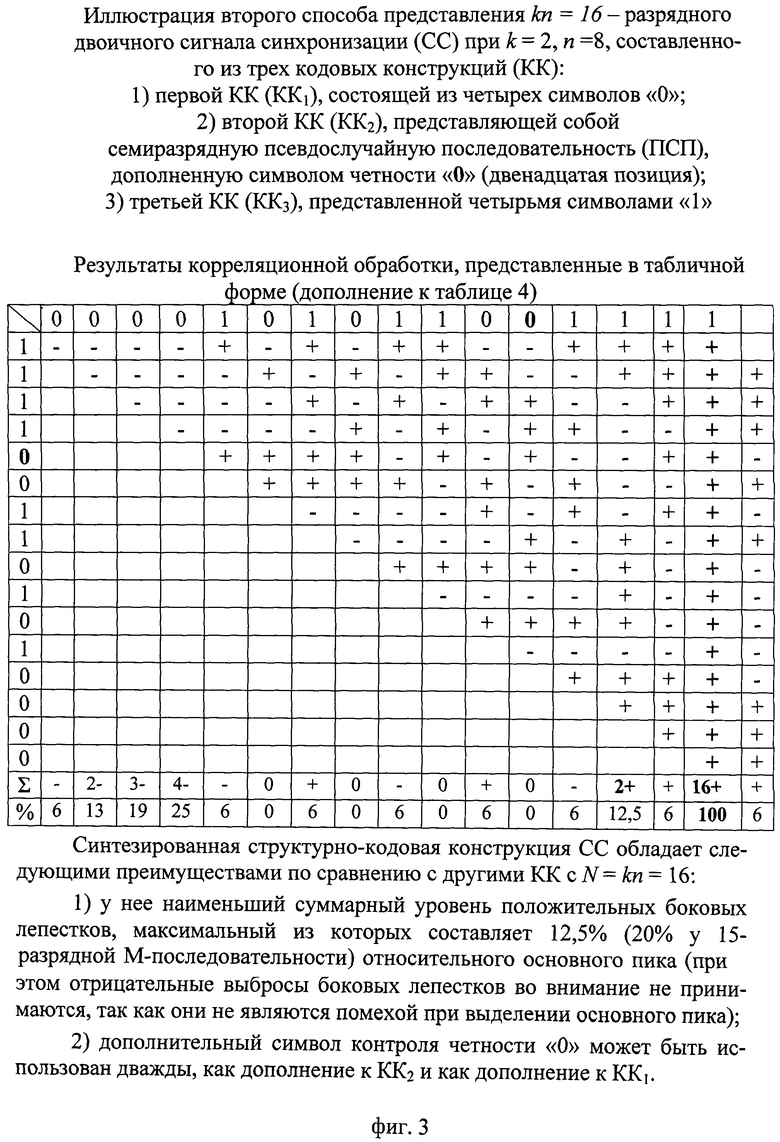
Сущность второго метода, составляющего основу предлагаемого изобретения, состоит в том, что СС составляют из следующих кодовых конструкций: первая из них представляет собой последовательность, составленную из kn/4 одноименных символов «0», следующая вторая кодовая комбинация представляет собой М-последовательность, состоящую из (kn/2 -1) символов, дополненных до kn/2 символов дополнительным символом четности «0», последняя кодовая конструкция представляет собой kn/4 одноименных символов «1».
В результате этого сохраняют преимущества первого и второго подходов. Кроме того, обеспечивают наилучшие корреляционные свойства СС при его свертке за счет дополнения псевдослучайной последовательности (ПСП), в частном случае М-последовательности, состоящей из (kn/2 -1) символов, дополнительным символом четности «0».
Пример СС, синтезированного на основе второго метода, приведен в таблице 4.

Результаты его корреляционной обработки в целом представлены на фиг.3. Из нее следует, что от «идеального» составного кода Баркера с ближайшим N=21, он отличается только тем, что только один положительный боковой выброс превышает значение +1: он равен +2 в 14 столбце. При этом отрицательные выбросы в первых четырех столбцах в расчет не принимают, поскольку основной пик АКФ - положительный и только положительные боковые выбросы являются помехой, ухудшающей возможности его выделения.
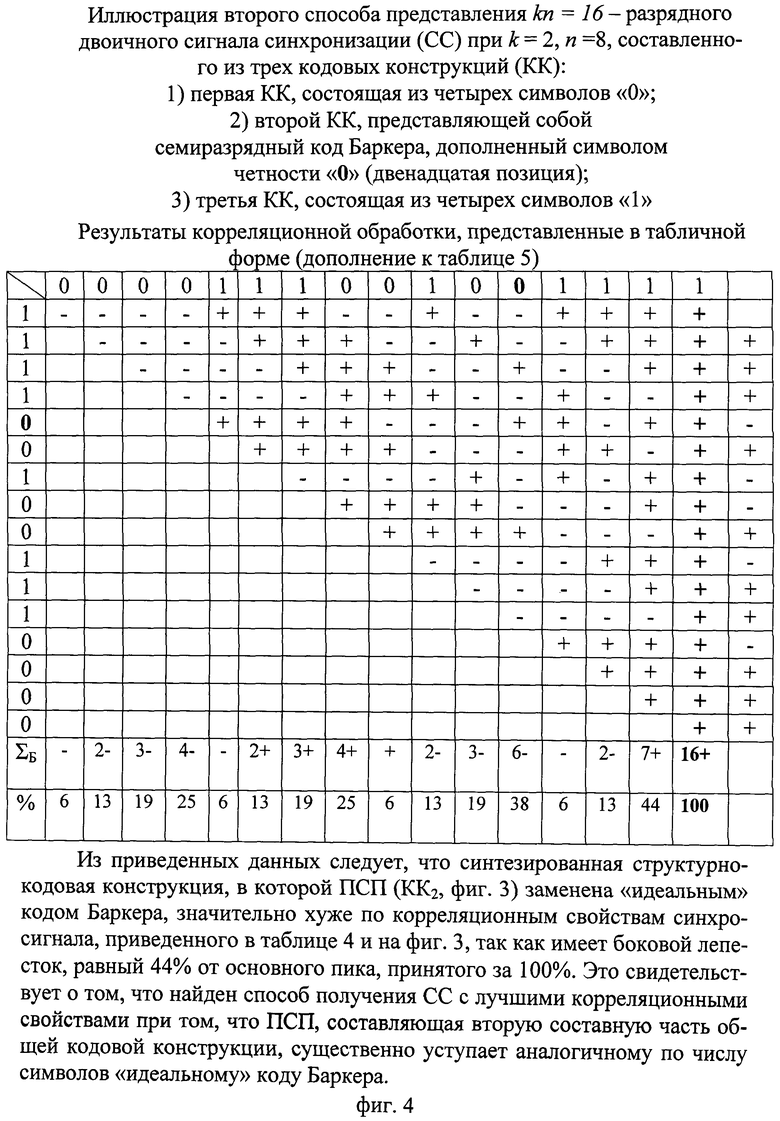
Если использовать в качестве М-последовательности 7-разрядный «идеальный» код Баркера, то пример СС, синтезированного на основе второго подхода, будет иметь вид, представленный в таблице 5.
Результаты корреляционной обработки СС при его приеме и идентификации представлены на фиг.4. Из иллюстрации следует, что корреляционные свойства СС в этом случае наихудшие: в 15-м столбце присутствует выброс бокового лепестка +7.
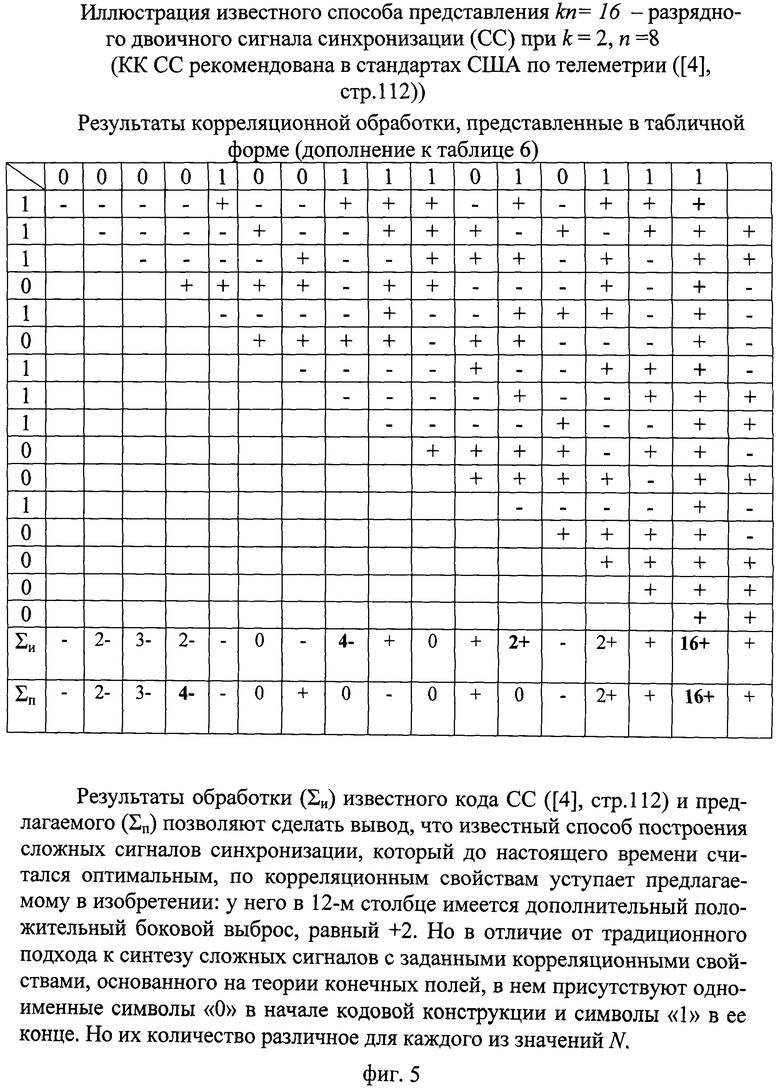
Для сравнения в таблице 6 представлен код СС с N=16, который признан оптимальным ([4], стр.112), а на фиг.5 приведены результаты его обработки.
Из полученных результатов обработки следует, что он уступает предлагаемому коду СС (таблица 4): у него в 12-м столбце имеется дополнительный положительный боковой выброс, равный +2. Но в отличие от традиционного подхода к синтезу сложных сигналов с заданными корреляционными свойствами, основанного на теории конечных полей, в нем присутствуют одноименные символы «0» в начале кодовой конструкции и «1» в ее окончании.
Однако количество символов «0» и «1», которые вводят в кодовую конструкцию СС, не определено на основе теоретического подхода, а подбирается при моделировании на ЭВМ. В результате этого появляются ошибки, о чем, в частности, свидетельствуют результаты сравнения предлагаемого кода СС (таблица 4) и кода, приведенного в таблице 6, который до настоящего время считался оптимальным.
Известные математические методы синтеза сложных сигналов с заданными корреляционными свойствами, основу которых составляет теория конечных полей, впервые исследованы в [6], Свердлик М.Б. Оптимальные дискретные сигналы. - М.: Сов. радио, 1975. - 200 с. Новые нетрадиционные элементы математического синтеза, основанные на конструктивной теории конечных полей, рассмотрены в [7], Кукушкин С.С. Теория конечных полей и информатика / Т.1: Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках - М: МО РФ, 2003. - 284 с, стр.128 - 144). Однако предлагаемые в них математические методы не учитывали все множество ограничений, с которыми приходится сталкиваться в задачах прикладного синтеза сложных сигналов, связанных с конкретными их применениями в различных технических системах.
Для дополнительного подтверждения преимуществ нового метода синтеза СС новый 16-разрядный код СС составим на основе «идеального» кода Баркера для N=11:<11100010010>2, который будем считать второй основной КК2, путем дополнения его первой КК1, состоящей из трех символов «0», и третьей КК3, составленной из двух символов «1» (таблица 7).
Результаты корреляционной обработки приведены на фиг.6. Из полученных результатов обработки следует, что данная кодовая конструкция уступает предлагаемому коду СС (таблица 4): у него боковой выброс +3 в пятом столбце и два положительных выброса +2 в шестом и десятом столбцах.
Проведенный анализ позволяет сделать следующие выводы:
- для частного случая построения ПСП c N=16, выбор которого определен необходимостью совершенствования отечественной практики телеизмерений при использовании БРТС «ОРБИТА-IVMO», предлагаемый способ обеспечивает возможность построения СС с наилучшими корреляционными свойствами;
- найдено оптимальное число разрядов первой и третьей составляющих общей кодовой конструкции: kn/4 (уменьшение числа символов «0» и «1» в примере, представленном в таблице 7, привело к ухудшению АКФ, несмотря на то обстоятельство, что в качестве основной КК2 была выбрана «идеальная» последовательность кода Баркера);
- найдено оптимальное решение при выборе конструкций СС: в новой конструкции представлены и кодовые комбинации, состоящие только из одноименных символов «0» и «1», и короткие ПСП, обеспечивающие синхронизм передаваемого и принимаемого потоков информации за минимальное время при неизменных других показателях эффективности систем телеизмерений и связи;
- приведенные результаты свидетельствует о том, что найден новый способ синтеза сложных структурно-кодовых конструкций (СКК), обладающих в своем классе сигналов наилучшими корреляционными свойствами;
- существующие методы математического синтеза СКК содержали общие рекомендации и не были ориентированы на проблемно-ориентированные задачи их использования в различных технических системах, поэтому выбор наиболее подходящих сложных сигналов осуществлялся на основе моделирования с использованием ЭВМ (в результате этого появлялись ошибки даже в тех случаях, когда N невелико).
Предлагаемый способ синхронизации передаваемых сообщений так же как и известные способы цифровой передачи, предполагает формирование на передающей стороне циклов (кадров для систем телеизмерений) передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и ν=m-kn информационных символов, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был принят на передающей стороне, в результате чего обеспечивают режим синхронной работы передающей и приемной систем.
В отличие от известных способов в предлагаемом способе на передающей стороне в системах связи и в системах телеизмерений с временным разделением каналов формируют циклы (кадры) передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и ν=m-kn информационных символов, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был принят на передающей стороне, на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной, а из нескольких кодовых конструкций, первая из которых представляет собой kn/4 повторяющихся символа «0», вторая - (kn/2-1)-разрядную псевдослучайную последовательность или М-последовательность, дополненную символом четности бит «0», а третья образована kn/4 повторяющимися символами «1», на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают трехканальной параллельной обработке, при которой в первом канале определяют автокорреляционную функцию для фрагментов цифрового группового сигнала, состоящих из kn символов двоичного кода, во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2 символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале поиск синхронизирующего слова осуществляют по кодовым конструкциям, которые в неискаженном виде представлены последовательностями, составленными из одноименных символов «0» и «1», во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2 символами в виде (kn/2 - 1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале обработки определяют местоположение в цикле (телеметрическом кадре) символов «0» и символов «1», разделенными между собой интервалом в (kn/2-1) символов, при этом дополнительный символ четности бит «0» используют по дополнительному назначению: для увеличения на «единицу» длины первой кодовой конструкции, составленной из одноименных kn/4 символов «0», на выходе первых двух параллельных каналов обработки формируют признаки идентификации синхронизирующего слова на основе сравнения полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, при этом в третьем канале обработки производят сравнение первой и третьей кодовых конструкций синхронизирующего слова с их копиями, которые хранят в блоке памяти, полученные результаты используют как оценку достоверности идентификации сигнала синхронизации, признаки которого сформированы в результате двухканальной корреляционной обработки, полученные результаты сравнивают с допустимым уровнем искажений, если полученные результаты обработки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
Расширенное множество отличительных признаков в предлагаемом способе заключается также в том, что на передающей стороне сигнал синхронизации используют для отображения изменения режимов передачи данных или для передачи дополнительной сервисной информации, например, информации о реализованной в процессе летных испытаний циклограмме полета ракеты, для чего во второй кодовой конструкции сигнала синхронизации, состоящей из (kn/2 - 1)-разрядной М-последовательности, производят цикловой сдвиг символов, а на приемной стороне при выделении синхросигнала дополнительно идентифицируют каждое их новых состояний М-последовательности, общее число которых, включая и исходное состояние сдвигового регистра, равно (kn/2 - 1), и в соответствии с заранее условленным правилом ассоциируют полученные сообщения о каждом новом состоянии М-последовательности с последовательностью чисел от 1 до (kn/2 - 1), которые используют для условного, заранее определенного, обозначения режимов работы адаптивной системы телеизмерений.
Предлагаемый способ отличается также тем, что на приемной стороне во втором канале обработки в процессе идентификации второй составляющей кодовой конструкции синхросигнала, которая должна быть представлена kn/2-символами в виде (kn/2 - 1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», на основе принятого символа четности «0» контролируют достоверность приема (kn/2 - 1)-разрядной псевдослучайной последовательности или М-последовательности, определяя выполнение условия четности количества символов «1» в выделенной кодовой конструкции и при наличии ошибки формируют признак недостоверности в виде сигнала определенного вида, результаты определения автокорреляционной функции кодовой последовательности и данные, полученные на основе принятого символа четности «0» и характеризующие достоверность принятой псевдослучайной последовательности или М-последовательности, используют для повышения оперативности поиска признаков сигналов цикловой синхронизации в принимаемом цифровом групповом сигнале.
В результате этого символ «0», которым должна заканчиваться вторая составляющая кодовой конструкции синхросигнала, используется для решения не одной, а для нескольких задач. Первая из них заключается в том, что данный символ дополняет (kn/2 - 1)-разрядную псевдослучайную последовательность или М-последовательность до байтовой структуры слов. Вторая состоит в том, что символ «0» используется для контроля достоверности идентификации ПСП или М-последовательности, выделяемой из цифрового группового телеметрического сигнала, что способствует уменьшению вероятности установления режима ложного синхронизма. Третье предназначение состоит в том, что символ четности бит «0» используют при корреляционной обработке, благодаря чему сохраняют байтовую структуру анализа передаваемых данных, уменьшают количество кодовых комбинаций, подлежащих проверке на выполнение всех признаков, которыми характеризуется синхрослово. Четвертая функция, выполняемая символом четности бит «0», заключается в том, что она дополняет выделенные первые kn/4 символы «0» дополнительным (kn/4+1) символом «0», благодаря чему повышают достоверность выделения первой и третьей составляющих кодовой конструкции синхрослова.
При применении способа появляется возможность использования сигнала синхронизации для передачи дополнительной информации. Она основана на свойстве ПСП и М-последовательности, состоящем в том, что циклический сдвиг ее символов не вызывает изменений ее автокорреляционной функции: она остается такой же, как и ранее. Но каждое ее значение, определяемое двоичным словом с числом разрядов kn/2 - 1, будет различным.
Например, для ПСП, представленной в таблице 4, при циклическом сдвиге ее символов получим следующие расшифровки двоичных семиразрядных слов:
1)<1 0 1 0 1 1 0>2=<86>10; 2)<0 1 0 1 1 0 1>2=<45>10;
3)<1 0 1 1 0 1 0>2=<90>10; 4)<0 1 1 0 1 0 1>2=<53>10;
5)<1 1 0 1 0 1 0>2=<106>10; 6)<1 0 1 0 1 0 1>2=<85>10;
7)<0 1 0 1 0 11>2=<43>10.
Они могут быть использованы по различному назначению. Одно из них связано с передачей информации о циклограмме полета ракеты, реализовавшейся в ходе летных испытаний, которая, например, связана со следующими отождествлениями:
1) значение<86>10 соответствует работе первой ступени ракеты;
2) значение<45>10 соответствует работе второй ступени ракеты;
3) значение<53>10 соответствует работе третьей ступени ракеты;
4) значение<90>10 определяет участок полета разгонного блока (РБ);
5) значение<85>10 появляется при установлении факта отделения космического аппарата (КА) от РБ;
6) значение<106>10 появляется при отклонении режима функционирования контролируемых объектов от нормы.
При установлении на передающей стороне по получаемым данным телеизмерений факта отклонения режима функционирования контролируемых объектов от нормы производится чередование значений, относящихся к участку полета ракеты, и значения<106>10.
Возможны также другие варианты использования предлагаемого способа, помимо задач, связанных с обеспечением синхронной работы передатчика и приемника.
Например, при разнесенном приеме телеметрической информации моменты времени поступления данных телеизмерений на станции различных измерительных пунктов привязаны к сигналам службы единого времени (СЕВ), но не к моментам совершения тех или иных событий на борту ракеты. Это различие определяется разностью в дальностях до контролируемого объекта. Если она составляет, например, 1000 км, то ошибка временной привязки составит: δt=3,3×10-3 с, а в некоторых БРТС длина основного телеметрического кадра имеет продолжительность 125×10-6 с. Наличие сообщения о произошедшем на борту ракеты циклическом сдвиге М-последовательности позволяет при сборе ТМИ учитывать имеющиеся расхождения временных шкал на борту и на Земле ([8], Кукушкин С.С., Гладков И.А, Чаплинский B.C. «Методы и информационные технологии контроля состояния динамических систем». - М.: Минобороны России, 2008-327 с. - стр.12 - 13).
Таким образом, в результате применения предлагаемого способа достигнут комплексный технический результат, проявляющийся в возможности существенного повышения помехоустойчивости системы синхронизации средств измерений и передачи информации, надежности идентификации циклограммы полета ракеты и уменьшения временной погрешности приведения к единому бортовому времени копий дублирующих потоков данных телеизмерений, принятых при разнесенном приеме.
Основной технический эффект заключается в том, чтобы устанавливать синхронизацию между передаваемыми и принимаемыми сигналами за минимальное время. В соответствии с теорией адаптивных систем для любого случая существует оптимальная длина циклового синхросигнала, при которой обеспечивается минимальное время, необходимое для его идентификации и обнаружения выхода из режима синхронной работы. Этот оптимум определяется типом используемой системы и поставленной целью, а также следующими факторами: вероятностью искажения бит Рb, соотношением α=kn/m, где kn - длина синхрослова, a m - длина цикла (кадра). Короткие цикловые синхросигналы являются наилучшими с точки зрения обеспечения минимального среднего времени вхождения в синхронизм, что особенно важно для определенного типа радиотелеметрических систем, и минимального среднего времени обнаружения выхода приемника из режима синхронной работы с передатчиком (вторая составляющая актуальна для систем связи). Однако при критерии вероятности обнаружения 90-99% предпочтительным являются длинные цикловые синхросигналы. Но за это увеличение вероятности обнаружения придется расплатиться уменьшением доли информационных символов, представленных в цикле (кадре), что в целом ряде случаев может оказаться неприемлемым.
Литература
1. Современная телеметрия в теории и на практике / Учебный курс», Спб.: Наука и Техника, 2007. - 672 с
2. И.М.Тепляков Радиотелеметрия. - М.: «Сов. радио», 1966. - 311 с,
3. Глобальная спутниковая радионавигационная система ГЛО-НАСС/Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, .
4. Былински П., Ингрем Д. Цифровые системы передачи: Пер. с анг./ Под ред. А.А.Визеля. - М.: Связь, 1980. - 360 с.
5. Шумоподобные сигналы в системах передачи информации /Под ред. проф. В.Б.Пестрякова. - М.: «Сов. радио», 1973. - 424 с.
6. Свердлик М.Б. Оптимальные дискретные сигналы. - М.: Сов. радио, 1975. - 200 с.
7. Кукушкин С.С. Теория конечных полей и информатика. Т.1: Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках. - М: МО РФ, 2003. - 284 с.
8. Кукушкин С.С., Гладков И.А, Чаплинский B.C. «Методы и информационные технологии контроля состояния динамических систем». - М.: Минобороны России, 2008 - 327 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ СИГНАЛОВ СИНХРОНИЗАЦИИ | 2019 |
|
RU2757975C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2591565C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2021 |
|
RU2792591C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ И СИСТЕМА МОНИТОРИНГА ЕЁ ЭФФЕКТИВНОСТИ | 2024 |
|
RU2840714C1 |
| Способ формирования сигнала в режиме программной перестройки рабочей частоты с изменяющейся полосой частот | 2020 |
|
RU2749863C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ЦИФРОВОЙ ИНФОРМАЦИИ, УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2109401C1 |
| СПОСОБ АДАПТИВНОЙ ПЕРЕДАЧИ ДАННЫХ В РАДИОЛИНИИ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2007 |
|
RU2356167C1 |
| Способ синтеза широкополосных сигналов на основе применения составных кодовых конструкций | 2023 |
|
RU2818227C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ И АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2021 |
|
RU2841083C2 |
Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи информации по цифровым каналам связи. Технический результат - повышение помехоустойчивости системы синхронизации средств измерений и передачи информации, минимизация вероятности ложных выходов из синхронизма за счет сбоев при приеме информации, уменьшение вероятности ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале; уменьшение времени установления режима синхронизации передаваемых и принимаемых сигналов. Для этого осуществляют выбор сигнала синхронизации (СС), состоящего из трех кодовых конструкций и организуют три параллельных канала обработки. В первом канале осуществляют согласованную корреляционную обработку кодовых последовательностей, состоящих из nk бит, с целью идентификации СС в целом. Во втором канале определяют наличие признаков СС среди анализируемых кодовых конструкций на основе корреляционной обработки (nk/2-1) символов с добавленным символом контроля четности бит «0», находящихся в средине исходного СС. При этом первые nk/4 символа «0» СС и последние его nk/4 символа «1» используют для уменьшения вероятности ложного опознания СС и повышения достоверности нахождения истинного СС. 2 з.п. ф-лы, 6 ил., 7 табл.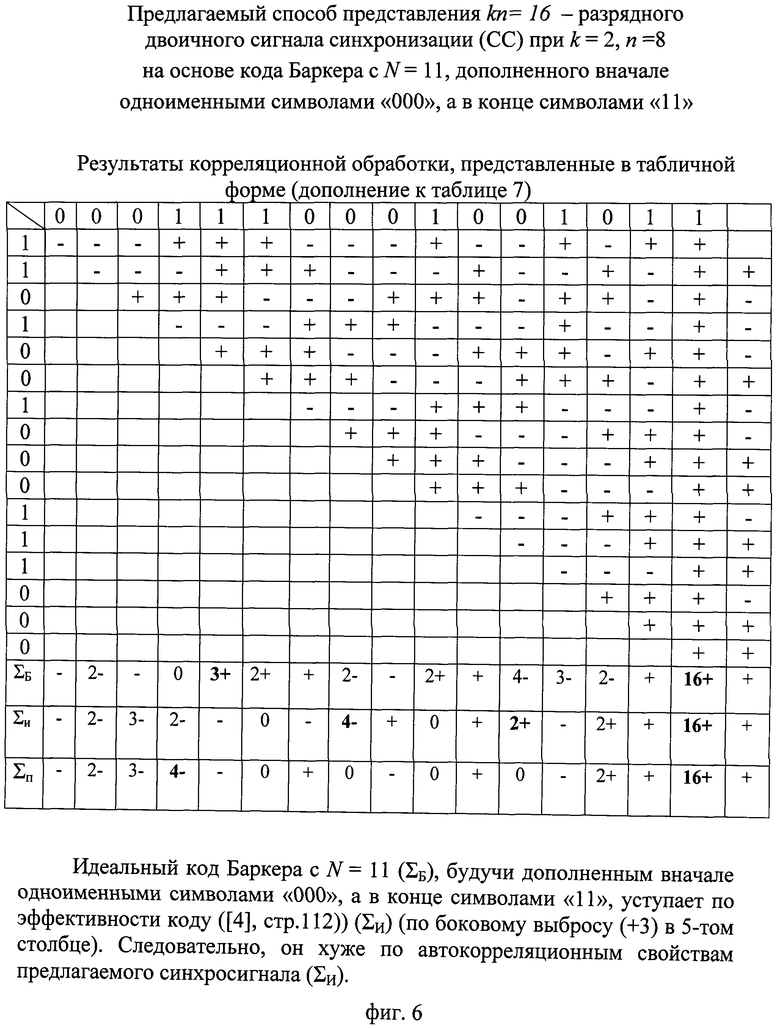
1. Способ синхронизации передаваемых сообщений и сигналов, заключающийся в том, что на передающей стороне в системах связи и в системах телеизмерений с временным разделением каналов формируют циклы (кадры) передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и ν=m-kn информационных символов, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был принят на передающей стороне, отличающийся тем, что на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной, а из нескольких кодовых конструкций, первая из которых представляет собой kn/4 повторяющихся символа «0», вторая - (kn/2-1)-разрядную псевдослучайную последовательность или М-последовательность, дополненную символом четности бит «0», а третья образована kn/4 повторяющимися символами «1», на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают трехканальной параллельной обработке, при которой в первом канале определяют автокорреляционную функцию для фрагментов цифрового группового сигнала, состоящих из kn символов двоичного кода, во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2-символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале поиск синхронизирующего слова осуществляют по кодовым конструкциям, которые в неискаженном виде представлены последовательностями, составленными из одноименных символов «0» и «1», во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2-символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале обработки определяют местоположение в цикле (телеметрическом кадре) символов «0» и символов «1», разделенными между собой интервалом в (kn/2-1) символов, при этом дополнительный символ четности бит «0» используют по дополнительному назначению: для увеличения на «единицу» длины первой кодовой конструкции, составленной из одноименных kn/4 символов «0», на выходе первых двух параллельных каналов обработки формируют признаки идентификации синхронизирующего слова на основе сравнения полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, при этом в третьем канале обработки производят сравнение первой и третьей кодовых конструкций синхронизирующего слова с их копиями, которые хранят в блоке памяти, полученные результаты используют как оценку достоверности идентификации сигнала синхронизации, признаки которого сформированы в результате двухканальной корреляционной обработки, полученные результаты сравнивают с допустимым уровнем искажений, если полученные результаты обработки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
2. Способ по п.1, отличающийся тем, что на передающей стороне сигнал синхронизации используют для отображения изменения режимов передачи данных или для передачи дополнительной сервисной информации, для чего во второй кодовой конструкции сигнала синхронизации, состоящей из (kn/2-1)-разрядной М-последовательности, производят цикловой сдвиг символов, а на приемной стороне при выделении синхросигнала дополнительно идентифицируют каждое из новых состояний М-последовательности, общее число которых, включая и исходное состояние сдвигового регистра, равно (kn/2-1), и в соответствии с заранее условленным правилом ассоциируют полученные сообщения о каждом новом состоянии М-последовательности с последовательностью чисел от 1 до (kn/2-1), которые используют для условного, заранее определенного, обозначения режимов работы адаптивной системы телеизмерений или для идентификации циклограммы полета контролируемого объекта.
3. Способ по п.1, отличающийся тем, что на приемной стороне во втором канале обработки находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2-символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», после чего на основе принятого символа четности «0» контролируют достоверность приема (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, определяя выполнение условия четности количества символов «1» в выделенной кодовой конструкции, и при наличии ошибки формируют признак недостоверности в виде сигнала определенного вида, результаты определения автокорреляционной функции кодовой последовательности и данные, полученные на основе принятого символа четности «0» и характеризующие достоверность принятой псевдослучайной последовательности или М-последовательности, используют для повышения оперативности поиска признаков сигналов цикловой синхронизации принимаемом цифровом групповом сигнале.
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ | 1981 |
|
SU1840033A1 |
| Способ синхронной передачи дискретной информации в волоконно-оптических системах связи | 1989 |
|
SU1688430A1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ПРИЕМА И ПЕРЕДАЧИ ИНФОРМАЦИИ ПО КАНАЛУ СВЯЗИ С ПОМЕХАМИ И ГЛУБОКИМИ ЗАМИРАНИЯМИ И РАДИОСТАНЦИЯ | 2006 |
|
RU2360361C2 |
| US 6982994 B2, 03.01.2006 | |||
| US 6535505 B1, 18.03.2003 | |||
| US 7650523 B2, 19.01.2010 | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |

