Изобретение относится к телеметрии, радиотехническим системам измерений, технике связи и может быть использовано для обеспечения синхронизации за минимальное время передаваемых и принимаемых сообщений и сигналов в условиях помех.
Известно [1], что на эффективность функционирования системы синхронизации комплексов телеизмерений и систем передачи данных оказывают влияние следующие факторы:
- выбранная последовательность цифровых сигналов (при двоичном коде от кодовой комбинации, составленной из символов «1» и «0»), которые используются в качестве сигналов синхронизации;
- соотношение k длительности кодовых комбинаций сигнала синхронизации (kn) к длине n кодовых комбинаций передаваемых сообщений (в телеметрических системах слов-измерений);
- отношение числа символов kn, входящих в цифровой синхросигнал, к общему количеству символов кода m, составляющих цикл (кадр) передаваемых сообщений (m=kn).
При этом особо актуальными становятся технические решения, способствующие разрешению следующих противоречий, составляющих основу многочисленных проблем повышения устойчивости приема информации в условиях помех. Короткие цикловые синхросигналы являются наилучшими с точки зрения обеспечения минимального среднего времени обнаружения выхода системы из установившегося режима синхронного приема информации, поэтому наиболее часто k выбирают, равным 3 (k=3). Однако при уменьшении числа символов kn синхросигнала увеличивается вероятность установления режима «ложного синхронизма», так как при этом увеличивается вероятность случайной или целенаправленной имитации кодовых конструкций, похожих на синхросигнал. При длинных цикловых синхросигналах (больших kn) вероятность правильного обнаружения и выделения синхросигналов повышается, однако уменьшается объем передаваемых информационных символов, определяемый соотношением v=m-kn. В условиях помех также появляются искажения, связанные со смещениями выделенных сигналов синхронизации. Такая ситуация, например, появляется в том случае, когда анализируемая кодовая группа содержит часть «правильного» синхросигнала. Чаще всего, подобная ситуация может возникнуть при добавлении к истинной кодовой группе синхросигнала следующего «случайного» символа. В этом случае происходит частичное перекрытие синхросигнала. Подобные ситуации возникают и при других степенях частичного перекрытия, когда временное положение выделенного синхросигнала смещается не на один, а на несколько символов. В результате ухудшается точность установления моментов времени, соответствующих принятому сигналу синхронизации.
Известен способ [1], в котором для уменьшения вероятности имитации сигнала синхронизации, под которой понимается вероятность того, что в передаваемом телеметрическом кадре будет найдена не одна, а несколько кодовых комбинаций заданной длины kn, используют в качестве синхрослов последовательности, которые состоят из одноименных символов «1» или «0» двоичного кода. Такой выбор связан с тем, что вероятность имитации в цикле передаваемых данных или в телеметрическом кадре второй такой кодовой последовательности за счет действия помех, будет наименьшей при случайном выборе в принимаемом цифровом групповом сигнале (ЦГС) кодовой комбинации, имеющей длину kn. Однако при этом наблюдают высокую вероятность частичного перекрытия синхросигнала, появляющегося в результате добавления к истинной кодовой группе синхросигнала в начале или в конце ее «случайного» одноименного символа «1» или «0». В этом случае появляется ошибка синхронизации, вызванная «сдвигом» идентифицированного синхросигнала относительно его истинного положения в кадре на один двоичный символ. Для того чтобы избавиться от ошибок такого типа, переходят ко второму этапу установления истинного местоположения сигнала синхронизации в кадре. Для этого, например, в циклических системах передачи информации, определяют временные интервалы между следующими подряд синхросигналами, выделенными при приеме передаваемых данных. Их троекратное совпадение считают достаточным для того, чтобы исключить ошибки синхронизации, вызванные «эффектом перекрытия».
Недостаток способа заключен в большой вероятности появления «эффекта перекрытия» и, как следствие этого, в высокой вероятности появления режима ложного синхронизма.
На устранение этого недостатка направлен способ [2], который выбран в качестве прототипа.
Он заключается в том, что на передающей стороне в системах связи и в системах телеизмерений с временным разделением каналов формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и v=m-kn информационных символов, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был принят на передающей стороне, отличающийся тем, что на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной, а из нескольких кодовых конструкций, первая из которых представляет собой kn/4 повторяющихся символа «0», вторая - (kn/2-1)-разрядную псевдослучайную последовательность или М-последовательность, дополненную символом четности бит «0», а третья образована kn/4 повторяющимися символами «1», на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают трехканальной параллельной обработке, при которой в первом канале определяют автокорреляционную функцию для фрагментов цифрового группового сигнала, состоящих из kn символов двоичного кода, во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2 символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале поиск синхронизирующего слова осуществляют по кодовым конструкциям, которые в неискаженном виде представлены последовательностями, составленными из одноименных символов «0» и «1», во втором канале находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2 символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», в третьем канале обработки определяют местоположение в цикле или телеметрическом кадре символов «0» и символов «1», разделенными между собой интервалом в (kn/2-1) символов, при этом дополнительный символ четности бит «0» используют по дополнительному назначению: для увеличения на «единицу» длины первой кодовой конструкции, составленной из одноименных kn/4 символов «0», на выходе первых двух параллельных каналов обработки формируют признаки идентификации синхронизирующего слова на основе сравнения полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, при этом в третьем канале обработки производят сравнение первой и третьей кодовых конструкций синхронизирующего слова с их копиями, которые хранят в блоке памяти, полученные результаты используют как оценку достоверности идентификации сигнала синхронизации, признаки которого сформированы в результате двухканальной корреляционной обработки, полученные результаты сравнивают с допустимым уровнем искажений, если полученные результаты обработки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
Кроме того, в способе [2] на передающей стороне сигнал синхронизации используют для отображения изменения режимов передачи данных или для передачи дополнительной сервисной информации, для чего во второй кодовой конструкции сигнала синхронизации, состоящей из (kn/2-1)-разрядной М-последовательности, производят цикловой сдвиг символов, а на приемной стороне при выделении синхросигнала дополнительно идентифицируют каждое их новых состояний М-последовательности, общее число которых, включая и исходное состояние сдвигового регистра, равно (kn/2-1), и в соответствии с заранее условленным правилом ассоциируют полученные сообщения о каждом новом состоянии М-последовательности с последовательностью чисел от 1 до (kn/2-1), которые используют для условного, заранее определенного, обозначения режимов работы адаптивной системы телеизмерений или для идентификации циклограммы полета контролируемого объекта.
Способ [2] в части идентификации сигнала синхронизации отличается еще и тем, что на приемной стороне во втором канале обработки находят автокорреляционную функцию для фрагментов цифрового группового сигнала, представленных kn/2 символами в виде (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, дополненной символом четности бит «0», после чего на основе принятого символа четности «0» контролируют достоверность приема (kn/2-1)-разрядной псевдослучайной последовательности или М-последовательности, определяя выполнение условия четности количества символов «1» в выделенной кодовой конструкции, и при наличии ошибки формируют признак недостоверности в виде сигнала определенного вида, результаты определения автокорреляционной функции кодовой последовательности и данные, полученные на основе принятого символа четности «0» и характеризующие достоверность принятой псевдослучайной последовательности или М-последовательности, используют для повышения оперативности поиска признаков сигналов цикловой синхронизации в принимаемом цифровом групповом сигнале.
Однако способ [2], обладая возможностью построения сложных составных сигналов синхронизации, имеет недостатки, проявляющиеся в выборе кодовых конструкций (ККi, i=1, 2, 3), из которых состоит сигнал синхронизации. Из трех составных частей сигнала синхронизации, представленных кодовыми конструкциями КК1, КК2 и КК3, только одна из них (КК2) принадлежит к числу псевдослучайных последовательностей (ПСП): это 7-разрядный идеальный код Баркера, дополненный символом «четности бит». В результате помехоустойчивость выделения сигнала синхронизации из смеси сигнала и помехи на основе корреляционной его обработки может не отвечать предъявляемым требованиям.
Задача предлагаемого изобретения заключена в том, чтобы устранить отмеченные недостатки и повысить помехоустойчивость выделения сигнала синхронизации, приняв способ [2] в качестве базового.
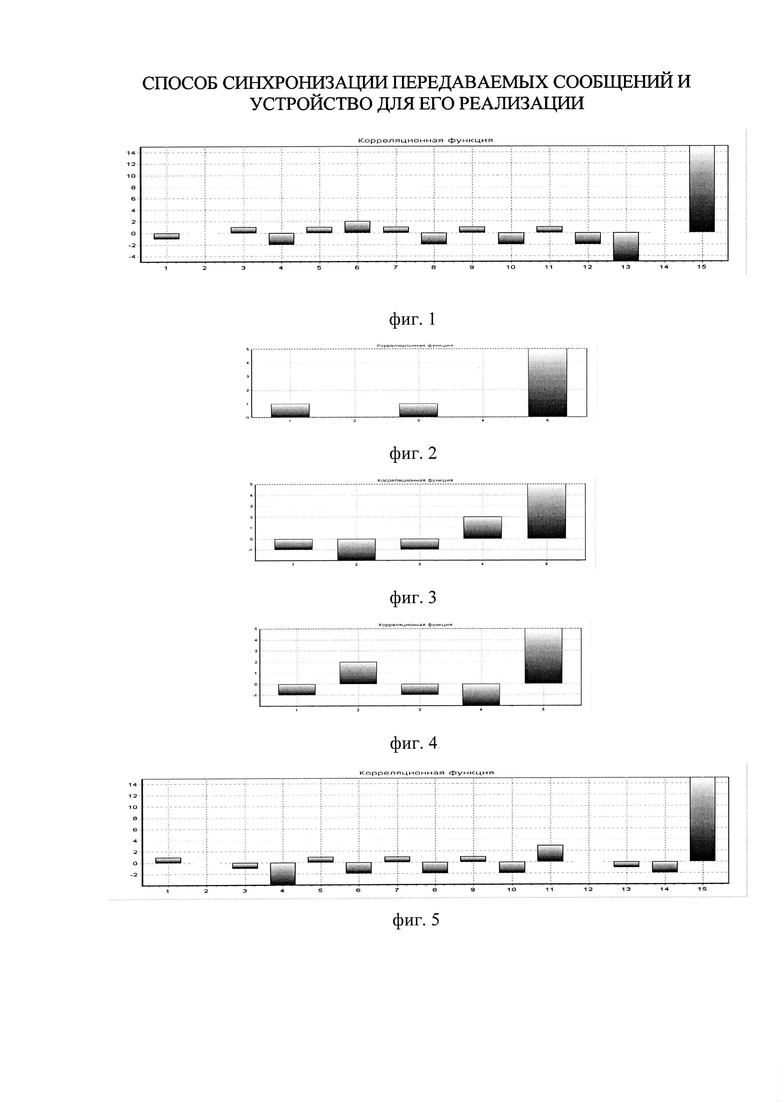
Сущностные характеристики изобретения заключаются в том, что хотя сигнал синхронизации также составлен из трех кодовых конструкций (ККi, i=1, 2, 3), однако каждая из них является ПСП, имеющей одну и ту же разрядность представления двоичным кодом. Например, для случая 15-разрядной М-последовательности, которую используют в БРТС «ОРБИТА-IVMO» в качестве сигнала синхронизации [1, 2], новая составная структура сигнала синхронизации такой же разрядности составлена из трех 5-разрядных ПСП: КК1, КК2 и КК3. На фиг. 1 представлена АКФ составного сигнала синхронизации СС, состоящего из трех ПСП равной длины n (n=5) КК1+КК2+КК3 : 001110001001101. Автокорреляционные функции (АКФ) составных частей КК1, КК2 и КК3 приведены на фиг. 3, фиг. 2 и фиг. 4 соответственно.
При этом на фиг. 2 представлена АКФ идеальной кодовой конструкции КК2 в виде кода Баркера 00010 с числом символов n2=5, а на фиг. 3 и фиг. 4 АКФ первой КК1 (код 00111 с числом символов n1=5) и третьей КК3 (код 01101 с числом символов n3=5), соответственно. Как следует из иллюстраций, представленных на фиг. 3 и фиг. 4, АКФ КК1 и КК3 обладают инверсно-изоморфными свойствами, проявляющимися в том, что при суммировании их боковые лепестки компенсируют друг друга (они становятся равными нулю), а основной пик усиливают в два раза.
При этом, как и в способе-прототипе [2], сохраняются неизменными существующие следующие принципы идентификации сигналов синхронизации при их приеме: 1) путем посимвольного сравнения принятого сигнала с копиями сигналов синхронизации, хранящимися в памяти приемной станции; 2) на основе сравнения совпадений временных интервалов между поступлениями сигналов синхронизации в приемник.
Однако в предлагаемом способе они дополнены новыми возможностями идентификации сигнала синхронизации в условиях помех за счет реализации параллельной операции определения автокорреляционных функций (АКФ) не только общей кодовой конструкции (КК), представляющей собой синхросигнал и состоящей из КК1, КК2 и КК3, но и каждой ее составной части (КК1, КК2 и КК3) в отдельности.
Помимо этого, по сравнению со способом-прототипом [2], изменены принципы идентификации псевдослучайных последовательностей (ПСП) -КК, КК1, КК2 и КК3): используются не три, а четыре канала параллельного приема и идентификации сигналов синхронизации на основе АКФ. Первый применяется для вычисления АКФ принятого сложного составного 3n-разрядного сигнала синхронизации в целом. Эта операция предлагаемого способа совпадает с аналогичной операцией способа-прототипа [2]. Но в способе-прототипе [2] только две кодовые конструкции, которые могут быть использованы для вычисления АКФ: сам синхронизирующий сигнал и его составная часть, представляющая собой 7-разрядный код Баркера. Из-за этого возможности такой новой операции идентификации синхронизирующего сигнала, как корреляционная обработка бит, используются недостаточно эффективно.
Отличие предлагаемого способа проявляется в том, что второй, третий и четвертый каналы параллельного приема сигнала синхронизации используют для автокорреляционной обработки последовательностей бит трех составных n-разрядных частей КК1, КК2 и КК3, представляющих собой три ПСП. При этом в предлагаемом способе первая и третья КК1 и КК3 синтезированы таким образом, что обладают инверсно-изоморфными свойствами, которые проявляются у АКФ1п и АКФ3о, принадлежащих КК1 и КК3 и формируемых в результате корреляционной обработки символов двоичного кода. Вторая по счету ПСП представляет собой идеальный n-разрядный код Баркера с АКФ2Б, у которой боковые лепестки минимальные, представленные значениями +1 или -1. Для примера на фиг. 2 представлена автокорреляционная функция (АКФ2Б) 5-разрядного двоичного кода Баркера: 00010, у которой два боковых лепестка со значениями +1.
Сущность предлагаемого изобретения заключается в том, что на передающей стороне в системах передачи сообщений с циклически повторяющимися пакетами данных, равной длины, или кадрами в системах телеизмерений с временным разделением каналов формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и информационных символов, количество которых определяют соотношением v=m-kn, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной сложной псевдослучайной последовательности, представляющей собой единую кодовую конструкцию (КК), а из нескольких составных кодовых конструкций (ККi), число которых равно трем (i=1, 2, 3), на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают параллельной обработке, формируют признаки идентификации синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, полученные результаты сравнивают с допустимым уровнем искажений. Предлагаемый способ отличается тем, что кодовые конструкции (ККi) выбирают равными по длине (разрядности представления), из которых первая и третья обладают инверсно-изоморфными автокорреляционными функциями (АКФ), вторая представляет собой идеальный код Баркера, при этом используют четыре параллельных канала обработки: в первом канале определяют символьную автокорреляционную функцию для последовательно поступающих символов цифрового группового сигнала по отношению к символам идентичной копии синхрослова, хранящейся в блоке памяти на приемной стороне, сравнивают значения полученной автокорреляционной функции с установленными пороговыми уровнями, по результатам сравнения на множестве принятых символов, больших или равных 3m символам двоичного кода (3 циклам или кадрам), помечают местоположение кандидатов в синхросигналы, выделенные кодовые последовательности кандидатов в синхросигналы делят на три составные части - кодовые конструкции (ККi, i=1, 2, 3) равной длины и производят идентификацию каждой из них, при этом результат их идентификации определяют на основе первого признака - мажоритарного правила по большинству решений о соответствии составных частей ККi их копиям, хранящимся в блоке памяти приемной стороны, определяют интервалы времени их повторения на множестве символов, равных или превышающих 3m, их постоянство используют в качестве второго признака идентификации синхросигнала, полученные результаты идентификации составных частей используют для подтверждения факта идентификации синхросигнала в целом и повышения его помехозащищенности, формируют признаки идентификации составных частей (ККi, i=1, 2, 3) синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, дополнительный контроль достоверности выделения синхрослов осуществляют на основе сложения автокорреляционных функций выделенных составных частей - кодовых конструкций (ККi, i=1, 2, 3), полученные результаты сравнивают с допустимым уровнем искажений, если полученные оценки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
При применении предлагаемого способа также обеспечивают возможность использования сигнала синхронизации для передачи дополнительной, в том числе и сервисной, информации.
Передача информации, как дополнительная функция, которая появляется при выделении сигнала синхронизации, может быть обеспечена как за счет операций циклического сдвига символов двоичных символов в КК2, так и на основе перестановки местами кодовых конструкций ККi, i=1, 2, 3. Такая возможность появляется при предлагаемой параллельной организации обработки сигнала синхронизации при его приеме. Требование одновременного решения не одной, а нескольких задач, составляет основу построения современных адаптивных систем телеизмерений. Его реализация, например, способствует разрешению множества существующих противоречий в развитии информационно-телеметрического обеспечения (ИТО) испытаний и штатной эксплуатации (ШЭ) ракетно-космической техники (РКТ). Следовательно, в предлагаемом способе также учтены системообразующие принципы построения перспективных адаптивных систем телеизмерений. Пример построения адаптивной системы телеизмерений подобного типа приведен в [3].
Таким образом, основной технический эффект заключается в повышении помехоустойчивости выделения сигналов синхронизации в приемно-регистрирующих станциях за минимальное время.
Новизна предлагаемого способа заключена также и в организации обработки сигнала синхронизации при его приеме на фоне помех.
Предлагаемый способ также обладает новыми сущностными характеристиками, относящимися к обработке ПСП большой длины. Известен способ параллельной обработки М-последовательности большой длины N (N=kn), которая является частным примером ПСП [4]. При его использовании принятая М-последовательность разбивается на неперекрывающиеся сегменты, имеющие длину Nc. [4]. Их число ic определяется соотношением: ic=N./(Nc.-1). Однако автокорреляционные свойства сегментов М-последовательностей оказываются значительно хуже, чем у М-последовательностей той же длины и зависят от Nc [4]. Поэтому такой способ может быть использован только для повышения оперативности выделения сложных псевдослучайных сигналов. При этом повышение показателей оперативности идентификации М-последовательностей достигается за счет понижения показателей помехозащищенности и достоверности.
Технический эффект у предлагаемого способа проявляется в том, что результирующая АКФ, получаемая в результате суммирования АКФ составных частей ПСП, обладает свойствами сверхидеальной КК Баркера, полученной по отношению к длинам символов, равным n. Сверхдеальность результирующей АКФ, получаемой при суммировании, связана с эффектом сжатия, при котором соотношение между основным пиком АКФ и его боковыми лепестками увеличено в три раза по отношению к длинам символов кодовых конструкций, равным n. Это соответствует кажущейся базе ПСП составных частей Bi, i=1, 2, 3, которая равна ее исходному значению, определяемому значением 3n. Для приведенного примера синхронизирующего сигнала (фиг. 1) 3n=15, а n=5 (фиг. 2, фиг. 3, фиг. 4).
При использовании предлагаемого изобретения недостатки, связанные с плохими автокорреляционными свойствами сегментов М-последовательностей, могут быть компенсированы преимуществами, которые появляются в результате кажущегося дополнительного расширения базы (В) исходного сложного сигнала, что обеспечивается при больших значениях n (N), например, при N=219-1=524287 и длительностях сегментов Nc=127 [4]. Но для решения задачи синхронизации в телеметрических системах и системах передачи данных, у которых по определению длина М-последовательности N мала, например N=3n=15 у БРТС «ОРБИТА-IVMO», такой прием не приемлем. Вычисленная автокорреляционная функция М-последовательности, используемой в качестве сигнала синхронизации у БРТС «ОРБИТА-IVMO», представлена на фиг. 5.
Принципиальное отличие предлагаемого способа от известного способа деления сложного сигнала на части [4] заключено в том, что сегменты (в нашем случае кодовые конструкции ККi), на которые может быть разделена сложная составная ПСП, также обладают идеальными автокорреляционными свойствами, приводящими к максимально возможному эффекту компенсации боковых лепестков.
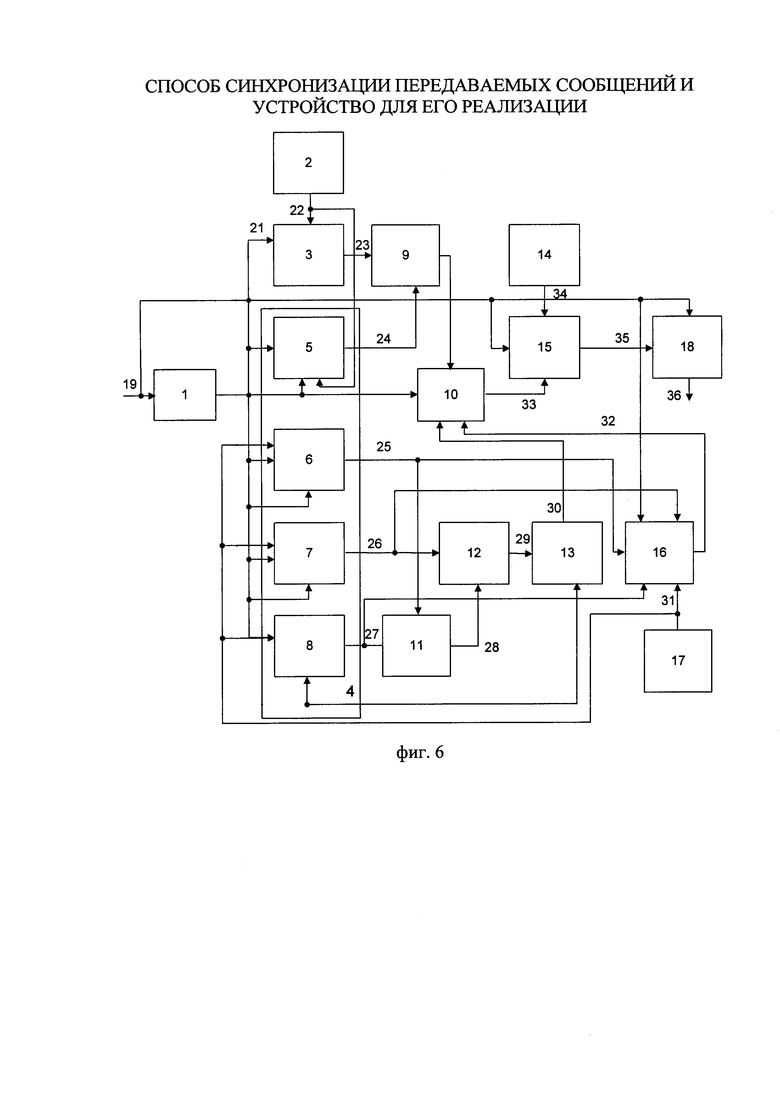
Устройство, реализующее предлагаемый способ, представлено на фиг. 6. Оно содержит: блок 1 выделения тактовых синхросигналов, блоки 2, 14 и 17 памяти, блок 3 посимвольного сравнения, блок 4 корреляционной обработки, состоящий из вычислителей 5, 6, 7 и 8 автокорреляционной функции, блок 9 идентификации синхронизирующего сигнала, блок 10 принятия решения, сумматоры 11 и 12, блок 13 идентификации составных частей синхронизирующего сигнала, блок 15 идентификации временных интервалов циклов, блок 16 определения очередности поступления составных частей синхронизирующего сигнала, блок 18 восстановления структуры переданного цифрового группового сигнала.
Устройство, реализующее предлагаемый способ, содержит блок выделения тактовых синхросигналов, вход которого соединен с одним из выходов приемного устройства, а выход подключен ко второму входу блока посимвольного сравнения, первый вход которого объединен со входом блока выделения тактовых синхросигналов, а третий вход подключен к выходу первого блока памяти, отличающееся тем, что вход блока выделения тактовых синхросигналов запараллелен с первыми входами блока идентификации временных интервалов циклов, блока определения очередности поступления составных частей синхронизирующего сигнала, блока восстановления структуры переданного цифрового группового сигнала и с первыми входами первого, второго, третьего и четвертого вычислителей автокорреляционной функции, входящих в состав блока корреляционной обработки, а вторые входы блока принятия решения, первого, второго, третьего и четвертого вычислителей автокорреляционной функции, а также блока идентификации составных частей синхронизирующего сигнала соединены с выходом блока выделения тактовых синхросигналов, выход первого блока памяти соединен с объединенными третьими входами блока посимвольного сравнения и первого вычислителя автокорреляционной функции, выходы которых подключены, соответственно, к первому и второму входам блока идентификации синхронизирующего сигнала, выход которого соединен с первым входом блока принятия решения, выход которого подключен ко второму входу блока идентификации временных интервалов циклов, третий вход которого соединен с выходом второго блока памяти, а выход подключен ко второму входу блока восстановления структуры переданного цифрового группового сигнала, выход третьего блока памяти соединен со вторым входом блока определения очередности поступления составных частей синхронизирующего сигнала и с объединенными третьими входами второго, третьего и четвертого вычислителей автокорреляционной функции, выход второго вычислителя автокорреляционной функции подключен к объединенным первому входу первого сумматора и третьему входу блока определения очередности поступления составных частей синхронизирующего сигнала, четвертый вход которого объединен со вторым входом первого сумматора и соединен с выходом четвертого вычислителя автокорреляционной функции, выход третьего вычислителя автокорреляционной функции соединен с объединенными пятым входом блока определения очередности поступления составных частей синхронизирующего сигнала и первым входом второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход соединен с первым входом блока идентификации составных частей синхронизирующего сигнала, выход которого подключен к четвертому входу блока принятия решения, третий вход которого подключен к выходу блока определения очередности поступления составных частей синхронизирующего сигнала, а выход соединен со вторым входом блока идентификации временных интервалов циклов, выход которого соединен со вторым входом блока восстановления структуры переданного цифрового группового сигнала, выход которого является выходом устройства.
Работа устройства, представленного на фиг. 6, заключается в следующем. Переданный групповой сигнал, восстановленный в приемнике и отображающий последовательность переданных сообщений и синхронизирующих сигналов, поступает входы блоков 3, 4, 15, 16 и 18. Результаты работы устройства проиллюстрированы на фиг. 1, фиг. 2, фиг. 3 и фиг. 4 для идеального случая, когда сигнал синхронизации не искажен помехой. На фиг. 2 представлена автокорреляционная функция бит, представляющая собой результат вычислений на выходе вычислителя 7 блока 4 корреляционной обработки при отсутствии искажений бит (фиг. 6 (выход 26)). В результате первого суммирования в сумматоре 11 автокорреляционных функций кодовых конструкций ККi, i=1 и 3, которые формируют на выходах 25 и 27 (фиг. 6), уровень боковых лепестков в условиях помех будет сведен к минимуму, а основной пик результирующей АКФ на выходе 28 (фиг. 6) увеличат в два раза. После второго суммирования в сумматоре 12 в случае отсутствия помех будет получен сверхидеальный код Баркера (фиг. 6 (выход 29)), у которого боковые лепестки автокорреляционной функции представлены значениями +1 или -1, а основной пик в три раза выше по сравнению с традиционным кодом Баркера той же разрядности (n). Этот результат проиллюстрирован на фиг. 2, фиг, 3 и фиг. 4 для случая, когда n=5. В этом случае разрядность синтезированного составного сигнала синхронизации равна 3n=15, что позволяет использовать новую кодовую конструкцию, АКФ которой приведена на фиг. 2, для замены 15-разрядной М-последовательности, используемой для синхронизации данных в БРТС «ОРБИТА-IVMO». Месторасположение сигнала синхронизации в цифровом групповом сигнале (ЦТС) (фиг. 6 (вход 19)) определяют в блоке 10 принятия решения. Если нет ошибок при его приеме, вызванных помехой, то этот факт фиксируется на выходе блока 9 идентификации синхронизирующего сигнала. Если же искажение синхронизирующего сигнала присутствует, то на основе результатов, полученных вычислителями АКФ составных частей в блоке 4 корреляционной обработки, и их суммирования в сумматорах 11 и 12 определяют в блоке 13 идентификации составных частей синхронизирующего сигнала, какая составная его часть не была искажена. Кроме того, в блоке 16 определяют, соответствует ли очередность поступления составных частей синхронизирующего сигнала тем данным, которые хранят в блоке 17 памяти (вход 31). Результаты идентификации блоков 13 и 16 формируют на выходах 30 и 32 для поступления в блок 10 принятия решений. В блоке 10 принимают решение о результатах идентификации синхронизирующего сигнала при его искажениях помехой. Затем в блоке 15 идентификации подтверждают (или не подтверждают) факт соответствия временных интервалов циклов их значениям, которые хранят в блоке 14 памяти. При положительных результатах очередной идентификации на выходе 35 формируют признак достоверности, используя который в блоке 18 восстанавливают структуру переданного цифрового группового сигнала. Восстановленный на выходе блока 18 цифровой групповой сигнал готов к проведению последующих операций декоммутации переданных данных телеизмерений. Если же признак достоверности выделения сигнала синхронизации на выходе 35 не будет сформирован, то блок 18 будет находиться в ожидании подтверждения того факта, что принятая структура ЦГС соответствует переданной.
Таким образом, в результате применения предлагаемого способа достигнут комплексный технический результат, проявляющийся в возможности существенного повышения помехоустойчивости системы синхронизации средств измерений и передачи дополнительной, в том числе сервисной, информации, обеспечения требуемой надежности идентификации циклограммы полета ракеты и уменьшения временной погрешности приведения к единому бортовому времени копий дублирующих потоков данных телеизмерений, принятых при разнесенном приеме.
Литература
1. «Современная телеметрия в теории и на практике / Учебный курс», Спб.: Наука и Техника, 2007. - 672с. (с. 469).
2. «Способ синхронизации передаваемых сообщений и сигналов» (Патент RU №2 538 281 С2, опубликован 10.01.15, бюл. №1 - 20 с.).
3. «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления» (Патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16с.
4. Шумоподобные сигналы в системах передачи информации / Под ред. проф. В.Б. Пестрякова. - М.: «Сов. радио», 1973. - 424с. (с. 129).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2021 |
|
RU2792591C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ СИГНАЛОВ СИНХРОНИЗАЦИИ | 2019 |
|
RU2757975C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ И СИСТЕМА МОНИТОРИНГА ЕЁ ЭФФЕКТИВНОСТИ | 2024 |
|
RU2840714C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ПЕРЕДАВАЕМЫХ СООБЩЕНИЙ | 2012 |
|
RU2538281C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ И АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2021 |
|
RU2841083C2 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| Способ синтеза широкополосных сигналов на основе применения составных кодовых конструкций | 2023 |
|
RU2818227C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ РАСШИРЕННОГО ЛОГИЧЕСКОГО ТРОИЧНОГО ПОМЕХОУСТОЙЧИВОГО КОДА В РЕЖИМАХ УЗКОПОЛОСНОЙ И ШИРОКОПОЛОСНОЙ СВЯЗИ | 2023 |
|
RU2834404C2 |
| СИСТЕМА РАДИОСВЯЗИ | 2020 |
|
RU2762574C1 |
| СПОСОБ КОМБИНИРОВАННОГО КОДИРОВАНИЯ И ВЫЧИСЛЕНИЯ ЭХО-СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516379C2 |
Изобретение относится к телеметрии, радиотехническим системам измерений, технике связи и может быть использовано для обеспечения синхронизации за минимальное время передаваемых и принимаемых сообщений и сигналов в условиях помех. Технический результат состоит в повышении помехозащищенности процесса выделения и идентификации сигнала синхронизации в условиях помех. Осуществляют выбор сигнала синхронизации (СС), состоящего из трех равных по длине (разрядности представления) кодовых конструкций (ККi, i=1, 2, 3), при этом используют четыре параллельных канала обработки: в первом канале определяют символьную автокорреляционную функцию (АКФ) для последовательно поступающих символов цифрового группового сигнала по отношению к символам идентичной копии синхро-слова, хранящейся в блоке памяти на приемной стороне, во втором, третьем и четвертом каналах обработки определяют АКФ, в результате суммирования которых получают сверхидеальный код Баркера, сравнивают значения полученных АКФ с установленными пороговыми уровнями, по результатам сравнения идентифицируют СС, в том числе и искаженный помехами при передаче. 2 н.п. ф-лы, 6 ил.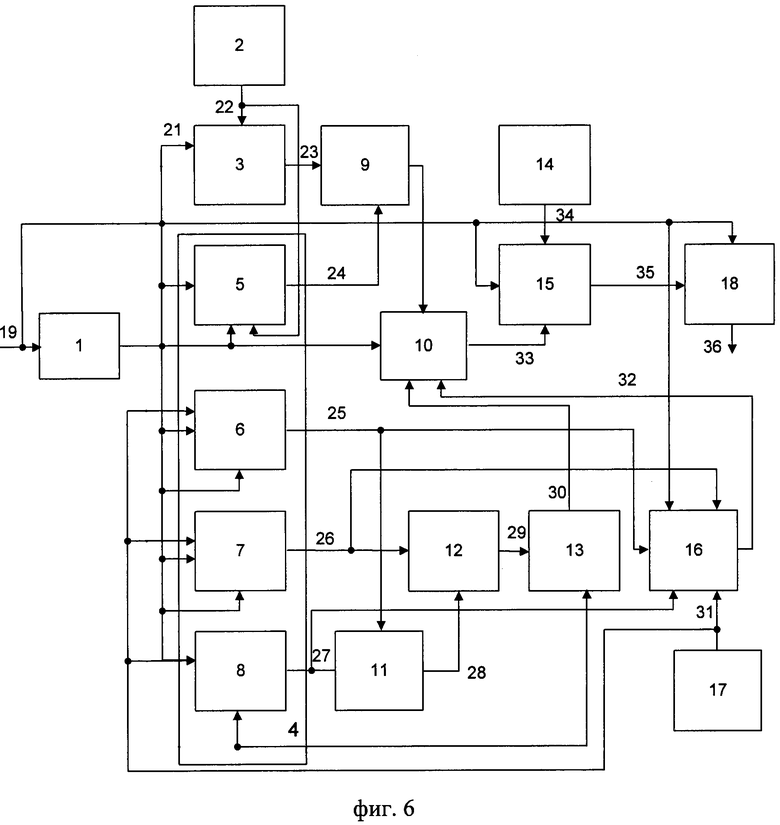
1. Способ синхронизации передаваемых сообщений и сигналов, заключающийся в том, что на передающей стороне в системах передачи сообщений с циклически повторяющимися пакетами данных, равной длины, и в системах телеизмерений с временным разделением каналов формируют циклы или кадры передаваемой цифровой информации, каждый из которых содержит m двоичных символов, синхронизирующий сигнал, состоящий из kn бит, и информационных символов, количество которых определяют соотношением ν=m-kn, синхронизирующее слово наделяют свойствами, позволяющими на приемной стороне отличить его от других сообщений и слов-измерений на фоне помех за допустимое время, на приемной стороне известный признак синхронизирующего слова идентифицируют на фоне помех, искажающих переданные символы кода, и используют для установления такого порядка следования информационных сообщений и слов-измерений, который был установлен на передающей стороне, при этом на передающей стороне синхронизирующий сигнал наделяют расширенным множеством отличительных признаков, для чего формируют его не из одной сложной псевдослучайной последовательности, представляющей собой единую кодовую конструкцию, а из нескольких составных кодовых конструкций, число которых равно трем, на приемной стороне для выделения синхронизирующих слов цифровой групповой сигнал подвергают параллельной обработке, на приемной стороне формируют признаки идентификации синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, значения которых выбирают в соответствии с заданными требованиями, определяемыми следующими вероятностями: обнаружения синхронизирующего сигнала в условиях помех, ложных выходов из синхронизма за счет сбоев при приеме информации, ложного поиска синхронизма за счет случайной имитации сигнала синхронизации в принятом цифровом групповом сигнале, полученные результаты сравнивают с допустимым уровнем искажений, отличающийся тем, что кодовые конструкции, из которых составлен сигнал синхронизации, выбирают равными по длине, при этом первая и третья кодовые конструкции обладают инверсно-изоморфными автокорреляционными функциями (АКФ), вторая представляет собой идеальный код Баркера, при этом используют четыре параллельных канала обработки: в первом канале определяют символьную автокорреляционную функцию для последовательно поступающих символов цифрового группового сигнала по отношению к символам идентичной копии синхрослова, хранящейся в блоке памяти на приемной стороне, сравнивают значения полученной автокорреляционной функции с установленными пороговыми уровнями, по результатам сравнения на множестве принятых символов, больших или равных 3m символам двоичного кода, помечают местоположение кандидатов в синхросигналы, выделенные кодовые последовательности кандидатов в синхросигналы делят на три составные части - кодовые конструкции равной длины и производят идентификацию каждой из них, при этом результат их идентификации определяют на основе первого признака - мажоритарного правила по большинству решений о соответствии составных частей кодовых конструкций их копиям, хранящимся в блоке памяти приемной стороны, определяют интервалы времени их повторения на множестве символов, равных или превышающих 3m, их постоянство используют в качестве второго признака идентификации синхросигнала, полученные результаты идентификации составных частей используют для подтверждения факта идентификации синхросигнала в целом и повышения его помехозащищенности, формируют признаки идентификации составных кодовых конструкций исходного синхронизирующего слова на основе сравнения соответствующих полученных автокорреляционных функций в каждом из каналов с установленными порогами, дополнительный контроль достоверности выделения синхрослов осуществляют на основе сложения взаимно-корреляционных функций выделенных составных частей - кодовых конструкций, полученные результаты сравнивают с допустимым уровнем искажений, если полученные оценки его превышают, то поиск сигнала синхронизации завершают, при противоположном результате процесс поиска сигнала синхронизации продолжают.
2. Устройство синхронизации сигналов, реализующее предлагаемый способ, содержит блок выделения тактовых синхросигналов, вход которого соединен с одним из выходов приемного устройства, а выход подключен ко второму входу блока посимвольного сравнения, первый вход которого объединен со входом блока выделения тактовых синхросигналов, а третий вход подключен к выходу первого блока памяти, отличающееся тем, что вход блока выделения тактовых синхросигналов запараллелен с первыми входами блока идентификации временных интервалов циклов, блока определения очередности поступления составных частей синхронизирующего сигнала, блока восстановления структуры переданного цифрового группового сигнала и с первыми входами первого, второго, третьего и четвертого вычислителей автокорреляционной функции, входящих в состав блока корреляционной обработки, а вторые входы блока принятия решения, первого, второго, третьего и четвертого вычислителей автокорреляционной функции, а также блока идентификации составных частей синхронизирующего сигнала соединены с выходом блока выделения тактовых синхросигналов, выход первого блока памяти соединен с объединенными третьими входами блока посимвольного сравнения и первого вычислителя автокорреляционной функции, выходы которых подключены, соответственно, к первому и второму входам блока идентификации синхронизирующего сигнала, выход которого соединен с первым входом блока принятия решения, выход которого подключен ко второму входу блока идентификации временных интервалов циклов, третий вход которого соединен с выходом второго блока памяти, а выход подключен ко второму входу блока восстановления структуры переданного цифрового группового сигнала, выход третьего блока памяти соединен со вторым входом блока определения очередности поступления составных частей синхронизирующего сигнала и с объединенными третьими входами второго, третьего и четвертого вычислителей автокорреляционной функции, выход второго вычислителя автокорреляционной функции подключен к объединенным первому входу первого сумматора и третьему входу блока определения очередности поступления составных частей синхронизирующего сигнала, четвертый вход которого объединен со вторым входом первого сумматора и соединен с выходом четвертого вычислителя автокорреляционной функции, выход третьего вычислителя автокорреляционной функции соединен с объединенными пятым входом блока определения очередности поступления составных частей синхронизирующего сигнала и первым входом второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход соединен с первым входом блока идентификации составных частей синхронизирующего сигнала, выход которого подключен к четвертому входу блока принятия решения, третий вход которого подключен к выходу блока определения очередности поступления составных частей синхронизирующего сигнала, а выход соединен со вторым входом блока идентификации временных интервалов циклов, выход которого соединен со вторым входом блока восстановления структуры переданного цифрового группового сигнала, выход которого является выходом устройства.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

