УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к сельскохозяйственной системе, в частности, но не исключительно, к сельскохозяйственной системе, которая включает в себя плуг, и способ работы сельскохозяйственной системы.
В сельском хозяйстве соблюдаются фермерские циклы, которые можно условно разделить на различные этапы подготовки земли, посева семян, внесения удобрений, орошения, выращивания сельскохозяйственных культур и сбора урожая. Каждый из этих этапов имеет решающее значение для получения оптимальных результатов урожая и достижения желаемой отдачи от первоначальных инвестиций. Из перечисленных этапов, подготовка почвы обычно дополнительно делится на этапы, при необходимости, очистки препятствий (например, кустарников, камней и булыжников) и последующей обработки почвы.
Обработка почвы крошит и разрыхляет почву, улучшает структуру почвы и вносит растительные остатки и навоз в почву, таким образом, удобряя землю. Улучшенная структура почвы позволяет увеличить рост корней растений, аэрацию почвы и проникновение/фильтрацию воды. В целом, это приводит к повышению урожайности, улучшению долгосрочного плодородия почвы, удержанию влаги в почве и борьбе с сорняками. Обработка почвы может быть разделена на первичную (относительно глубокую) и вторичную (относительно мелкую) обработку почвы. При первичной обработке почвы, такой как вспашка, почва переворачивается так, что питательные вещества выходят на поверхность. В дополнение к обработке почвы для доставки свежих питательных веществ на верхнюю часть и отложению остатков растений ниже, где они будут разрушаться, этот процесс также проветривает землю, позволяя ей удерживать больше влаги. Подготовка почвы на большую глубину приводит к более грубой обработке поверхности, чем вторичная обработка почвы. Вторичная обработка почвы (например, возделывание семян) разбивает комки почвы на меньшие массы, что может быть желательно для небольших семян или растений, которые имеют минимальную способность к переработке комков.
Первичная обработка почвы, и особенно вспашка, широко рассматривается как один из наиболее эффективных способов предотвращения болезней сельскохозяйственных культур, удаления сорняков и борьбы с мышами и другими вредителями. В своей простейшей форме переворотный плуг, также известный как отвальный плуг, включает в себя различные плужные корпуса, которые являются лезвиями для проникновения и переворачивания почвы в рядах соседних канавок, известных как борозды. Современные плуги обычно включают в себя множество плужных корпусов, соединенных с рамой плуга таким образом, что они смещены в боковом направлении друг от друга, когда плуг используется. Каждый плужный корпус соединен с рамой плуга посредством соответствующих балок. Рама плуга, в свою очередь, соединена с буксирующим или толкающим транспортным средством через сцепное устройство, расположенное на переднем или заднем конце рамы.
В зависимости от плотности почвы, рабочая глубина плужных корпусов может быть отрегулирована. Например, рабочая глубина плужных корпусов может быть небольшой в более твердых (плотных) почвах, тогда как более глубокая рабочая глубина может применяться в более мягких (менее плотных) почвах. Плужные корпуса могут быть жестко прикреплены к основной раме, так что их расстояние от основной рамы остается постоянным. Соответственно, рабочая глубина плугов затем регулируется путем изменения расстояния от поверхности земли основной рамы. Если основная рама приближается к поверхности земли, расстояние от поверхности земли, и плужные корпуса проникают глубже в почву. Аналогичным образом, если основная рама поднимается дополнительно от земли, расстояние от поверхности земли увеличивается, и плужные корпуса поднимаются, тем самым, уменьшая рабочую глубину.
Расстояние от поверхности земли основной рамы может регулироваться одним или более опорными колесами. Одно или более опорных колес могут быть связаны с любой частью основной рамы, такой как задний конец основной рамы. Регулируемое соединение между основной рамой и опорным колесом может быть предусмотрено для обеспечения возможности изменения расстояния между опорным колесом и основной рамой. Во время вспашки, опорное колесо движется по поверхности земли и выдерживает вес плуга. Если расстояние между опорным колесом и основной рамой уменьшается, то соответственно уменьшается расстояние от поверхности земли между основной рамой и поверхностью земли. С другой стороны, если расстояние между опорным колесом и основной рамой увеличивается, расстояние от поверхности земли основной рамы увеличивается. Как указано выше, изменение расстояния от поверхности земли основной рамы приводит к изменению рабочей глубины плужного корпуса.
Большинство современных плугов имеют обратимый тип, в котором основная рама вращается на 180 градусов (то есть переворачивается) относительно сцепки. Поворотный цилиндр, прикрепленный к сцепке, может использоваться для поворота (реверса) плуга. Во время поворота основной рамы, первый набор плужных корпусов, который первоначально был расположен ниже основной рамы (первая конфигурация), переносится в верхнюю часть основной рамы. В то же время, второй набор плужных корпусов, который первоначально был расположен сверху основной рамы, затем перемещается в положение ниже основной рамы. Оборотный плуг тогда находится во второй конфигурации. Основная рама может многократно поворачиваться (переворачиваться) между первой и второй конфигурацией, особенно во время маневров поворота на поворотных полосах. Всякий раз, когда плуг переворачивается, первый и второй набор плужных корпусов меняются местами.
В оборотных плугах, средство для регулировки рабочей глубины плужных корпусов (т.е. основной рамы) требуется для обеих конфигураций оборотного плуга. Существует в основном два типа колес для контроля глубины для оборотных плугов. Первый тип включает в себя одно вращающееся опорное колесо, которое используется в обеих конфигурациях оборотного плуга. Одно вращающееся опорное колесо должно перемещаться с одной стороны основной рамы на другую во время оборачивания. Эта боковая передача одного опорного колеса может быть достигнута путем поворота последнего с одной стороны на другую.
Второе решение устраняет необходимость перемещения колеса регулировки глубины от одной стороны к другой. Во втором варианте, два отдельных опорных колеса могут быть прикреплены к основной раме. Первое опорное колесо может быть расположено на первой стороне основной рамы, а второе опорное колесо может быть расположено на второй, противоположной стороне основной рамы. Каждое из двух колес затем используется только в одной конфигурации плуга.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты и варианты осуществления изобретения обеспечивают сельскохозяйственную систему, как заявлено в прилагаемой формуле изобретения.
Согласно одному аспекту текущего изобретения предложена сельскохозяйственная система, содержащая:
плуг, при этом плуг содержит:
плужный корпус;
защитный механизм автоотвода, который выполнен с возможностью срабатывания, когда плужный корпус сталкивается с камнем или другим препятствием; и
датчик срабатывания, выполненный с возможностью обеспечения данных срабатывания в ответ на срабатывание защитного механизма автоотвода;
систему определения местоположения, связанную с плугом, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют местоположение плуга; и
контроллер, который выполнен с возможностью:
приема данных срабатывания при срабатывании защитного механизма автоотвода; и
хранения данных местоположения, обеспечиваемых системой определения местоположения, в качестве местоположения срабатывания на основе данных срабатывания, при этом местоположение срабатывания является местоположением плуга в момент срабатывания защитного механизма автоотвода.
Предпочтительно, такая система позволяет сохранять в памяти места расположения камней или других препятствий, с которыми сталкивается плуг.Таким образом, последующая сельскохозяйственная операция на поле может быть выполнена более эффективно с учетом расположения камней/препятствий.
Датчик срабатывания может быть выполнен с возможностью прямого или косвенного контроля положения плужного корпуса и/или скорости, с которой плужный корпус оставляет свое рабочее положение для обеспечения данных срабатывания.
Контроллер может быть выполнен с возможностью: определения местоположения плужного корпуса на основании местоположения срабатывания, причем местоположение плужного корпуса представляет местоположение плужного корпуса в момент срабатывания защитного механизма автоотвода; и сохранения местоположения плужного корпуса.
Контроллер может быть выполнен с возможностью определения того, являются ли два местоположения срабатывания меньшими порогового расстояния друг от друга, и если они являются, то приписывания одного и того же идентификатора камня каждому из двух местоположений срабатывания.
Данные срабатывания могут содержать данные о глубине срабатывания, которые могут представлять глубину плужного корпуса во время срабатывания.
Согласно другому аспекту текущего изобретения предложена сельскохозяйственная система, содержащая:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
привод, выполненный с возможностью управления работой сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют текущее местоположение сельскохозяйственного орудия; и
контроллер, который выполнен с возможностью:
приема одного или более местоположений срабатывания, при этом одно или более местоположений срабатывания являются местоположениями плуга в момент, когда защитный механизм автоотвода сработал в более ранней сельскохозяйственной операции;
приема данных о местоположении орудия; и
обработки данных местоположения орудия и одного или более местоположений срабатывания для того, чтобы обеспечить сигнал управления приводом для привода для того, чтобы управлять работой привода.
Сельскохозяйственный орудие может содержать взаимодействующий с землей инструмент; и
контроллер может быть выполнен с возможностью:
определения местоположения взаимодействующего с землей инструмента на основании данных местоположения орудия, причем местоположение взаимодействующего с землей инструмента представляет текущее местоположение взаимодействующего с землей инструмента; и
обработки местоположения взаимодействующего с землей инструмента и одного или более местоположений срабатывания для того, чтобы подать сигнал управления приводом для приводного механизма для управления работой привода.
Сельскохозяйственное орудие может быть плугом. Плуг может содержать плужный корпус. Привод может содержать защитный привод автоотвода для приложения усилия смещения к плужному корпусу таким образом, что он смещается к рабочему положению. Сигнал управления приводом может быть выполнен с возможностью уменьшения силы смещения, которая обеспечивается защитным приводом автоотвода, на основе заданной взаимосвязи между данными местоположения взаимодействующего с землей инструмента (или данными местоположения орудия) и одного или более местоположений срабатывания.
Сигнал управления приводом может быть выполнен с возможностью уменьшения усилия смещения, которое обеспечивается защитным приводом автоотвода, на основе сравнения между (i) разницей между данными местоположения взаимодействующего с землей инструмента (или данными местоположения орудия) и местоположением срабатывания, и (ii) пороговым расстоянием.
Сельскохозяйственное орудие может быть плугом, который может включать плужный корпус.
Привод может содержать привод регулировки ширины плуга для перемещения плужного корпуса в поперечном направлении.
Привод может содержать привод для регулировки глубины для регулировки рабочей глубины плужного корпуса.
Плуг может также включать предплужник. Привод может содержать привод предплужника для регулировки рабочей глубины предплужника.
Привод может содержать: привод приведения в действие, который обеспечивает движущую силу для плуга; и/или рулевой привод, который управляет направлением движения плуга.
Также раскрыт реализуемый на компьютере способ работы сельскохозяйственной системы, причем сельскохозяйственная система содержит:
плуг, при этом плуг содержит:
плужный корпус;
защитный механизм автоотвода, который выполнен с возможностью срабатывания, когда плужный корпус сталкивается с камнем или другим препятствием;
датчик срабатывания, выполненный с возможностью обеспечения данных срабатывания в ответ на срабатывание защитного механизма автоотвода; и
систему определения местоположения, связанную с плугом, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют местоположение плуга;
способ включает этапы, на которых:
принимают данные срабатывания при срабатывании защитного механизма автоотвода; и
хранят данные местоположения, обеспечиваемые системой определения местоположения, в качестве местоположения срабатывания на основе данных срабатывания, при этом местоположение срабатывания является местоположением плуга в момент срабатывания защитного механизма автоотвода.
Также раскрыт реализуемый на компьютере способ работы сельскохозяйственной системы, причем сельскохозяйственная система содержит:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
привод, выполненный с возможностью управления работой сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют текущее местоположение сельскохозяйственного орудия; и
способ включает этапы, на которых:
принимают одно или более местоположений срабатывания, при этом одно или более местоположений срабатывания являются местоположениями плуга в момент, когда защитный механизм автоотвода сработал в более ранней сельскохозяйственной операции;
принимают данные о местоположении орудия; и
обеспечивают сигнал управления приводом для привода для того, чтобы управлять работой привода на основании данных местоположения орудия и одного или более местоположений срабатывания.
Также раскрыта сельскохозяйственная система, содержащая:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
взаимодействующий с землей инструмент;
датчик, выполненный с возможностью обеспечения данных о событиях на основе работе сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения; и
контроллер, который выполнен с возможностью:
приема данных события;
хранения данных местоположения, обеспечиваемых системой определения местоположения, в качестве местоположения события, при этом местоположение события является местоположением сельскохозяйственного орудия в момент времени, в который данное событие было отмечено.
Также раскрыта сельскохозяйственная система, содержащая:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
привод, выполненный с возможностью управления работой сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют текущее местоположение сельскохозяйственного орудия; и
контроллер, который выполнен с возможностью:
приема одного или более местоположений события;
приема данных о местоположении орудия;
обработки данных местоположения орудия и одного или более местоположений события для того, чтобы обеспечить сигнал управления приводом для привода для управления работой привода.
Также раскрыт реализуемый на компьютере способ работы сельскохозяйственной системы, причем сельскохозяйственная система содержит:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
взаимодействующий с землей инструмент;
датчик, выполненный с возможностью обеспечения данных о событиях на основе работе сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения; и
способ включает этапы, на которых:
принимают данные события;
хранят данные местоположения, обеспечиваемые системой определения местоположения, в качестве местоположения события, при этом местоположение события является местоположением сельскохозяйственного орудия в момент времени в который данное событие было отмечено.
Также раскрыт реализуемый на компьютере способ работы сельскохозяйственной системы, причем сельскохозяйственная система содержит:
сельскохозяйственное орудие, при этом сельскохозяйственное орудие содержит:
привод, выполненный с возможностью управления работой сельскохозяйственного орудия;
систему определения местоположения, связанную с сельскохозяйственным орудием, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют текущее местоположение сельскохозяйственного орудия; и
способ включает этапы, на которых:
принимают одно или более местоположений события;
принимают данные о местоположении орудия;
обеспечивают сигнал управления приводом для привода для управления работой привода на основании данных местоположения орудия и одного или более местоположений события.
Сельскохозяйственное орудие может быть плугом. Взаимодействующий с землей инструмент может быть плужным корпусом или предплужником.
Может быть предусмотрена компьютерная программа, которая при запуске на компьютере заставляет компьютер конфигурировать любое устройство, включая систему, контроллер или процессор раскрытый в данном документе, или выполнение любого способа, раскрытого в данном документе. Компьютерная программа может быть программной реализацией, и компьютер может рассматриваться как любое подходящее аппаратное обеспечение, включая процессор цифровых сигналов, микроконтроллер и реализацию в постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ) или в электронно стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) в качестве не ограничивающих примеров. Программное обеспечение может быть программой сборки.
Компьютерная программа может быть предоставлена на машиночитаемом носителе, который может быть физическим машиночитаемым носителем, таким как диск или устройство памяти, или может быть воплощен как кратковременный сигнал. Такой кратковременный сигнал может быть загружен по сети, включая загрузку через Интернет.
В пределах объема этой заявки, явно предполагается, что могут быть приняты различные аспекты, варианты осуществления, примеры и альтернативы, изложенные в предыдущих абзацах, а также формула изобретения и/или последующее описание и чертежи, и, в частности, их отдельные признаки. самостоятельно или в любой комбинации. То есть все варианты осуществления и все признаки любого варианта осуществления могут комбинироваться любым способом и/или комбинацией, если только такие признаки не являются несовместимыми. Заявитель оставляет за собой право изменить любую первоначально поданную заявку или подать любую новую заявку соответствующим образом, включая право вносить изменения в любую первоначально поданную заявку, чтобы она зависела от и/или учитывала любую особенность любой другой заявки, хотя она первоначально не была заявлена таким образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один или более вариантов осуществления настоящего изобретения теперь будут описаны, только в качестве примера, со ссылкой на прилагаемые чертежи, на которых:
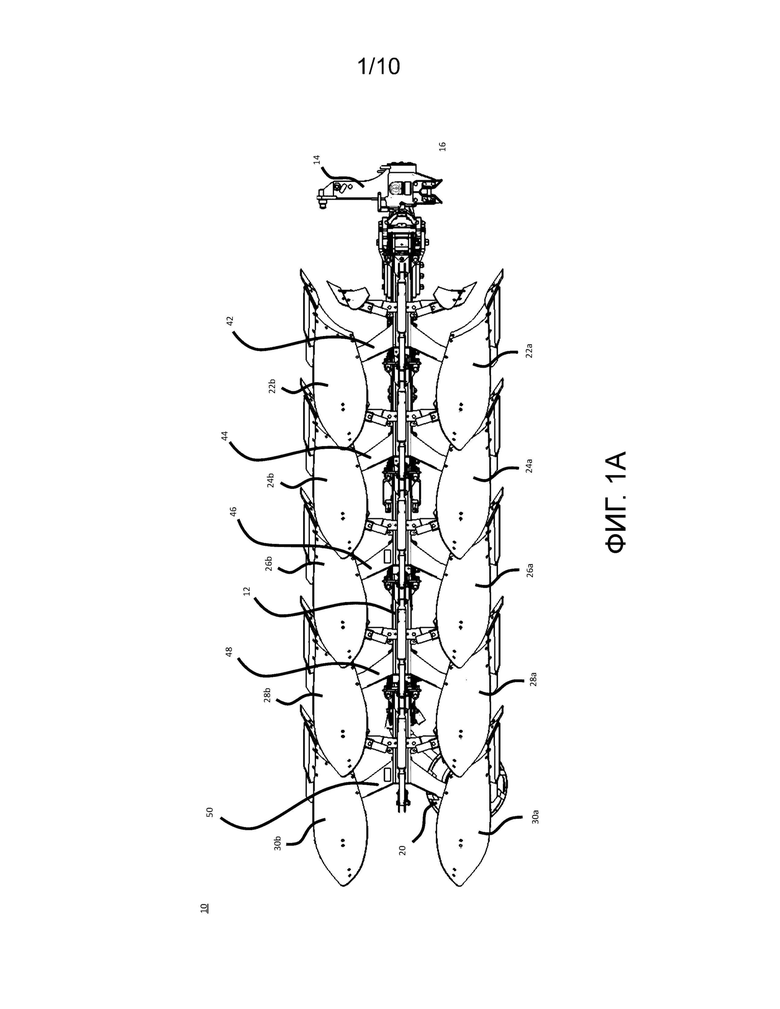
Фиг. 1А показывает правосторонний вид сельскохозяйственного орудия с фиксированными взаимодействующими с землей инструментами;
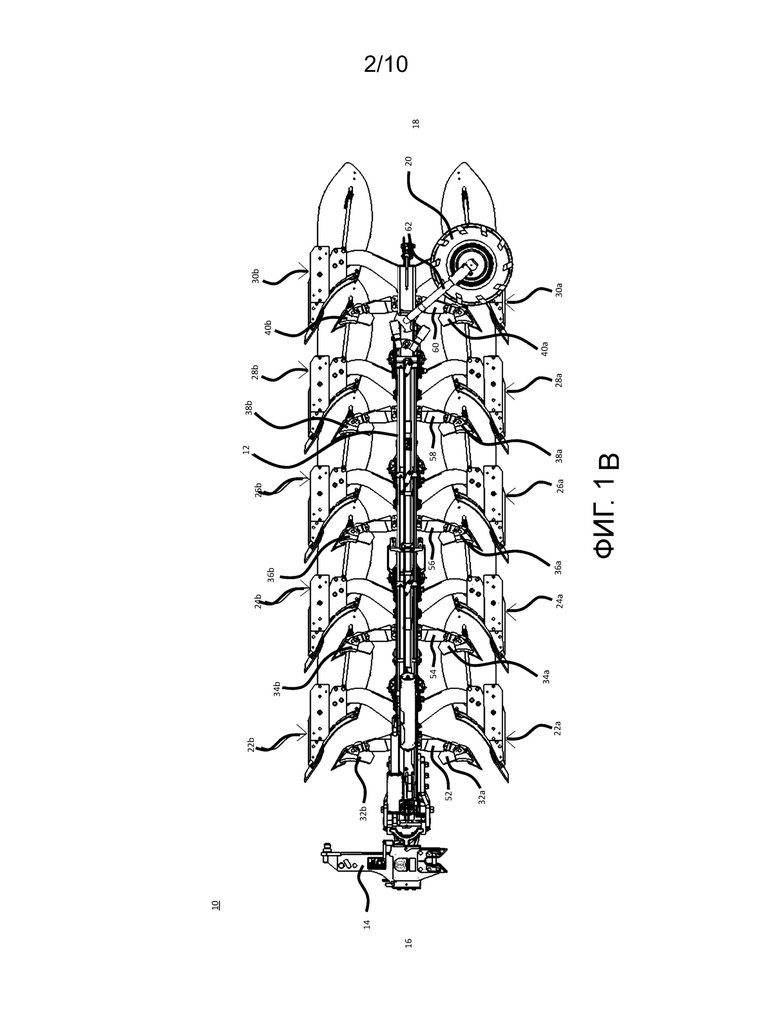
Фиг. 1В показывает левосторонний вид сельскохозяйственного орудия, показанного на фиг. 1А;
Фиг. 1С показывает вид в плане сельскохозяйственного орудия, показанного фиг. 1А;
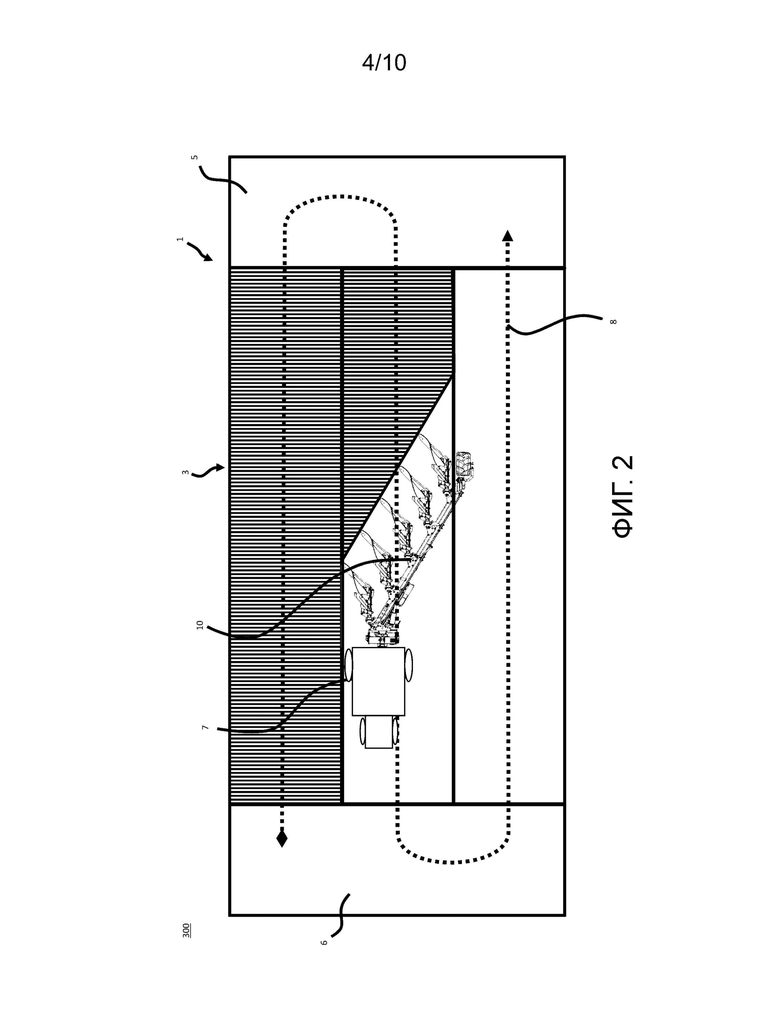
Фиг. 2 показывает схематичное представление траектория движения сельскохозяйственной машины в рабочей зоне;
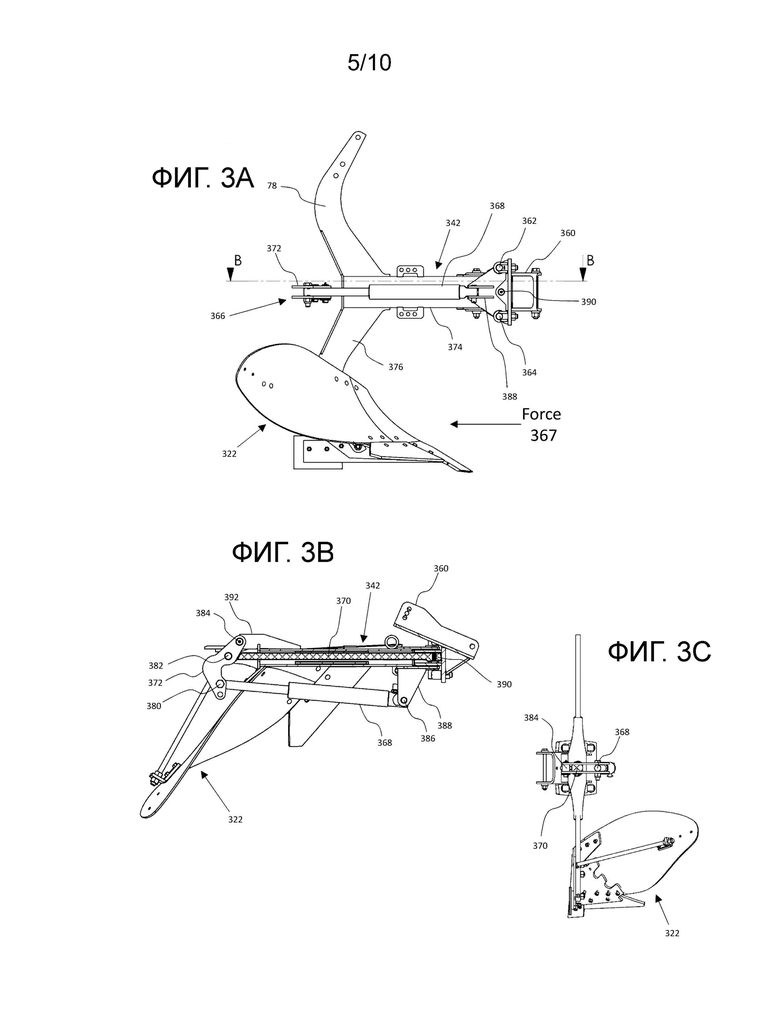
Фигуры 3А, 3В и 3С иллюстрируют часть плуга, которая включает механизм автоотвода от камней для плужного корпуса и балки, где плужный корпус находится в рабочем положении;
Фигуры 4А, 4В и 4С представляют собой соответствующие виды части плуга по фигурам 3А-3С, которые иллюстрируют механизм автоотвода от камней, когда плужный корпус находится в сработавшем положении;
Фиг. 5 показывает пример сельскохозяйственной системы согласно настоящему изобретению.
Фиг. 6 схематично иллюстрирует как хранимые места срабатывания могут быть использованы в последующей сельскохозяйственной операции;
Фиг. 7 схематично показана часть сельскохозяйственной системы, которая включает сельскохозяйственное орудие, такое как плуг, который может быть использован для выполнения последующей сельскохозяйственной операции;
Фиг. 8 иллюстрирует другой пример сельскохозяйственной системы по настоящему изобретению.
Фиг. 9 схематично иллюстрирует способ работы сельскохозяйственной системы; и
Фиг. 10 схематично иллюстрирует другой способ работы сельскохозяйственной системы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигуры 1А-1С показывают различные виды сельскохозяйственного орудия, в частности, плуга 10. Как будет описано более подробно ниже, плуг 10, показанный на фигурах 1А-1С, является оборотным плугом.
Плуг 10 содержит основную раму 12. Основная рама 12 может представлять собой прямоугольную или круглую трубу, продолжающуюся между сцепкой 14 на переднем конце 16 плуга по направлению к опорному колесу 20 на заднем конце 18 плуга. Основная рама 12 поддерживает множество взаимодействующих с землей инструментов.
В примере на фигурах 1А-1С взаимодействующие с землей инструменты включают в себя плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28а, 28b, 30а, 30b и предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38б, 40а, 40b плуга. Множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а, 30а и предплужники 32а, 34а, 36а, 38а и 40а плуга, расположены на первой стороне основной рамы 12. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество первых взаимодействующих с землей инструментов расположены ниже основной рамы 12.
Множество вторых взаимодействующих с землей инструментов, то есть плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b и 40b плуга, расположены на второй стороне основной рамы 12, напротив множества первых взаимодействующих с землей инструментов. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество вторых взаимодействующих с землей инструментов расположены выше основной рамы.
Каждый из плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b соединен с основной рамой 12 посредством балок 42, 44, 46, 48, 50. Каждая из балок 42, 44, 46, 48, 50 имеет, по существу, Y-образную структуру.
Первая балка 42 поддерживает первую пару плужных корпусов 22a, 22b. Вторая балка 44 поддерживает вторую пару плужных корпусов 24a, 24b. Третья балка 46 поддерживает третью пару плужных корпусов 26a, 26. Четвертая балка 48 поддерживает четвертую пару плужных корпусов 28a, 28b. Пятая балка 50 поддерживает пятую пару плужных корпусов 30a, 30b.
Каждая из пар плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b предназначена для создания борозды в поле, когда плуг тянется позади или толкается сельскохозяйственным транспортным средством, таким как трактор. Из этого следует, что каждый проход иллюстрированного плуга 10 через поле создает пять смежных борозд.
Обращаясь к фиг. 2, описана типичная работа сельскохозяйственной машины, содержащей трактор 7 и плуг 10. При использовании, плуг 10 тянется как прицеп (орудие) позади сельскохозяйственного буксировочного транспортного средства (например, трактора 7). Понятно, что эквивалентно возможно расположить плуг 10 перед или как перед, так позади трактора 7.
Фиг. 2 показывает схему рабочей зоны 1, например, поля культуры, которое разделено на основное поле 3 и поворотные полосы 5, 6. Трактор 7 тянет плуг 10 по основному полю 3, в целом, параллельными рабочими рядами. Рабочие ряды являются частью траектории 8 трактора 7 и обычно проходят параллельно с длинным краем рабочей зоны 1. Каждый рабочий ряд представляет отдельный проход сельскохозяйственной машины по полю между поворотными полосами 5 и 6. Как будет более подробно описано ниже, пяти бороздовой плуг, такой как примерный плуг, показанный на фигурах 1А-1С, создает в общей сложности пять борозд за один проход.
В конце каждого прохода/рабочего ряда, трактор 7 и плуг 10 используют приближающуюся поворотную полосу 5 или 6 для разворота, как показано траекторией 8. В данной области техники известно, что почва поворотных полос 5, 6 подвержена более высоким уровням уплотнения почвы, поскольку она получает больше нагрузки на единицу площади, чем основное поле 3. Известно, что для того, чтобы не нарушать почву на поворотных полосах 5, 6 больше, чем это необходимо, необходимо поднять взаимодействующие с землей инструменты, такие как плужные корпуса и предплужники, от земли в поворотной полосе, или транспортное положение непосредственно перед достижением плугом 10 поворотной полосы 5 или 6, соответственно. После того, как трактор 7 и соответствующий плуг 10 повернули на поворотную полосу 5, 6, взаимодействующие с землей инструменты плуга 10 снова опускаются в рабочее положение, чтобы зацепиться с почвой основного поля 3.
На иллюстрации фиг. 2, плуг 10 работает на основном поле 3 и, следовательно, расположен в рабочем положении. Когда плуг 10 достигает границы между поворотной полосой 5/6 и основным полем 3, плуг 10 переводится в поворотное/транспортное положение. Отсюда следует, что каждый рабочий ряд начинается с регулировки плуга из транспортного положения в рабочее положение и заканчивается регулировкой плуга из рабочего положения в транспортное положение.
Плуг 10, показанный на фигурах 1А-1С, является полностью установленным. В полностью установленных плугах, вес плуга переносится исключительно трактором, когда плуг находится в своем транспортном положении (на поворотной полосе). Другими словами, плуг затем поддерживается исключительно трактором 7 через сцепку 14 и может подниматься над землей подъемным цилиндром рычажной передачи трактора.
Во время поворотного движения на поворотных полосах, плуг 10 также переворачивается. То есть основная рама 12 поворачивается на 180 градусов относительно передней сцепки 14 для перемещения плуга из первой конфигурации во вторую конфигурацию. В своей первой конфигурации, показанной на фигурах 1А-1С, плуг 10 настроен так, что плужные корпуса 22а, 24а, 26а, 28а и 30а каждой из пар находится в контакте с почвой. Эта первая конфигурация показана на фиг.2 и иногда упоминается как «конфигурация с поворотом вправо», поскольку отвалы плужных корпусов 22а, 24а, 26а, 28а и 30а выполнены с возможностью перемещения почвы вбок слева направо, если смотреть в направление движения. Во второй конфигурации (не показана) плуг 10 настроен так, что плужные корпуса 22b, 24b, 26b, 28b и 30b каждой из пар находятся в контакте с почвой. Эта вторая конфигурация достигается после поворота основной рамы на 180 градусов, так что большинство плужных корпусов затем расположены справа от трактора (не показано). Отсюда следует, что вторая конфигурация также упоминается как «конфигурация с поворотом влево».
Обработка поля плугом 10 в этой первой конфигурации обеспечивает первую борозду, созданную первым плужным корпусом 22а, вторую борозду, созданную вторым плужным корпусом 24а, третью борозду, созданную третьим плужным корпусом 26а, четвертую борозду, созданную четвертым плужным корпусом 28а и пятую борозду, созданную пятым плужным корпусом 30а. Ширина борозды определяется поперечным расстоянием d между плужными корпусами 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b, как иллюстрировано на фиг. 1C.
Когда оборотный плуг 10 достигает конца первого прохода, основная рама 12 поворачивается на 180 градусов (переворачивается) относительно сцепки 14. Поворотный цилиндр (не показан), прикрепленный к сцепке 14, может использоваться для поворота (переворота) плуга 10. Во время поворота основной рамы, первое множество плужных корпусов, например, 22а, 24а, 26а, 28а, 30а, переносятся на верхнюю часть плуга 10. В то же время, второе множество плужных корпусов, например, 22b, 24b, 26b, 28b, 30b, которые не использовались в предыдущем проходе, затем переносятся на нижний конец плуга 10 и будут погружаться в почву во время следующего прохода. Оборотный плуг затем находится во второй конфигурации (не показана).
Выполнение второго прохода поля плугом 10 в этой второй конфигурации обеспечивает первую борозду, созданную шестым плужным корпусом 22b, вторую борозду, созданную седьмым плужным корпусом 24b, третью борозду, созданную восьмым плужным корпусом 26b, четвертую борозду, созданную девятым плужным корпусом 28b, и пятую борозду, созданную десятым плужным корпусом 30b.
Оборотный плуг 10 между последовательными проходами имеет то преимущество, что плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b, которые зацепляются с почвой, всегда обращены к одному и тому же боковому краю основного поля 3, независимо от ориентации трактора.
В обеих конфигурациях плуга 10, основная рама 12 поддерживается опорным колесом 20. Опорное колесо 20 расположено на заднем конце 18 плуга 10. Поскольку плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b обычно прикреплены к основной раме через балки 42, 44, 46, 48 и 50, это не позволяет регулировать рабочую глубину упомянутых взаимодействующих с землей инструментов, не изменяя расстояние от поверхности земли основной рамы 12. Для этого плуг 10, показанный на фигурах 1А-1С, включает в себя опорное колесо 20, которое действует как опорное колесо для регулировки расстояния от поверхности земли основной рамы 12. Тяга, предусмотренная между опорным колесом 20 и основной рамой 12, позволяет оператору поднимать или опускать основную раму 12 относительно поверхности 80 земли. Поскольку положение множества первого и второго взаимодействующих с землей инструментов фиксировано относительно основной рамы 12, любое изменение расстояния от поверхности земли основной рамы также будет влиять на рабочую глубину множества первых и вторых взаимодействующих с землей инструментов. В частности, если основная рама 12 опускается путем регулировки соединения между опорным колесом 20 и основной рамой 12, то рабочая глубина множества первых взаимодействующих с землей инструментов, показанных на фигурах 1А-1С, увеличивается, то есть множество первых взаимодействующих с землей инструментов опускаются дополнительно в почву. Если, с другой стороны, основная рама 12 поднимается, то рабочая глубина множества первых взаимодействующих с землей инструментов уменьшается, т.е. множество первых взаимодействующих с землей инструментов извлекаются из почвы.
Фигуры 3А, 3В и 3С иллюстрируют часть плуга, которая включает механизм автоотвода от камней для плужного корпуса 322 и балки 342, где плужный корпус 322 находится в рабочем положении; Фиг. 3А показывает вид сбоку, фиг. 3В показан вид сечения по линии B-B на фиг. 3А, а фиг. 3С показывает вид с торца с дистального конца балки 342. Фигуры 4А, 4В и 4С представляют собой соответствующие виды, которые иллюстрируют механизм автоотвода от камней, когда плужный корпус находится в сработавшем положении, как будет описано ниже.
Балка 342 соединяет плужный корпус 322 с рамой (не показана) оборотного плуга. Плужный корпус 322 является примером первого взаимодействующего с землей инструмента. Эти фигуры показывают корпус 360 балки, который обеспечивает механическое соединение между балкой 342 и рамой. Балка 342 шарнирно соединена с корпусом 360 балки и, следовательно, также шарнирно соединена с рамой. Как будет описано ниже, корпус 360 балки имеет две точки 362, 364 поворота, одна из которых может использоваться для каждой из первой и второй конфигураций оборотного плуга.
Балка 342 имеет, по существу, Y-образную структуру, которая включает в себя центральный участок 374, первое плечо 376 балки и второе плечо 378 балки. Центральный участок 374 балки 342 имеет проксимальный конец, который шарнирно соединен с корпусом 360 балки, и дистальный конец. Два плеча 376, 378 балки продолжаются от дистального конца балки 342. Первое плечо 376 балки соединяет плужный корпус 322 с центральным участком 374 балки 342. Второе плечо 378 балки соединяет второй плужный корпус (не показан для ясности иллюстрации) с центральным участком 374 балки 342. Плужный корпус 322 может использоваться для зацепления почвы и обработки поля, когда оборотный плуг находится в первой конфигурации. Второй плужный корпус (не показан) может использоваться для зацепления почвы и обработки поля, когда оборотный плуг находится во второй конфигурации.
Фигуры 3А, 3В и 3С также показывают приводной механизм 366, который обеспечивает силу смещения для балки 342, так что плужный корпус 322 смещается к рабочему положению. Таким образом, сила смещения может быть косвенно приложена к плужному корпусу посредством приводного механизма 366, прикладывающего усилие к балке, которая механически связана с плужным корпусом. Приводной механизм, показанный на этих фигурах, также может называться защитным механизмом автоотвода. Сила смещения может быть установлена таким образом, что, когда плужный корпус 322 протягивается через почву, когда плуг обрабатывает поле, плужный корпус 322 сохраняет свою предназначенную ориентацию. То есть, сила смещения, приложенная приводным механизмом 366, преодолевает реактивную силу 367, испытываемую плужным корпусом при его движении через почву. Однако если плужный корпус 322 ударил камень или другое препятствие, скрытое под землей, то дополнительное усилие, которое камень прикладывает к плужному корпусу, способно преодолеть силу смещения, приложенную приводным механизмом, так что балка 342 может поворачиваться вокруг одной из точек 362, 364 поворота. Понятно, что любая ссылка на камень в этом документе, в более общем смысле, может относиться к любому препятствию, которое испытывает плуг или другое сельскохозяйственное орудие. Когда балка 342 поворачивается таким образом, плужный корпус 322 перемещается вверх, как показано на фигурах 4А-4С, так что он находится над камнем. Следовательно, операция вспашки не должна останавливаться, когда плужный корпус 322 сталкивается с камнем. Как только плужный корпус 322 пройдет камень, сила смещения, прилагаемая приводным механизмом, возвращает плужный корпус 322 в рабочее положение.
Приводной механизм 366 включает в себя цилиндр 368, соединительный стержень 370 и тягу 372. Соединительный стержень 370 в этом примере в основном расположен в полости, которая находится внутри центрального участка 374 балки 342. Таким образом, центральный участок 374 балки 342 может рассматриваться как втулка вокруг соединительного стержня 370. Большая часть длины соединительного стержня 370 видна в сечении на фиг. 3В, а конец соединительного стержня 370 также виден на фиг. 3С. На фиг. 3А, соединительный стержень 370 закрыт цилиндром 368 и балкой 342.
В этом примере, балка 342 включает в себя область 388 для установки цилиндра (проушину) на проксимальном конце центрального участка 374 балки 342, и область 392 для установки тяги на дистальном конце центрального участка 374 балки 342. Как показано на фиг. 3В, область 388 установки цилиндра и область 392 установки тяги продолжаются от противоположных сторон балки 342, так что они смещены в поперечном направлении друг от друга на противоположных концах соединительного стержня 370.
Один конец тяги 372 соединен с областью 392 установки тяги в точке 384 соединения тяги с балкой. Таким образом, первый конец тяги 372 может поворачиваться относительно балки 342, но не может испытывать поступательное движение относительно балки 342. Второй конец тяги 372 соединен с первым концом цилиндра 368 в точке 380 соединения цилиндра с тягой. Второй конец цилиндра 368 соединен с областью 388 установки цилиндра в точке 386 соединения цилиндра с балкой. Первый конец соединительного стержня 370 соединен с корпусом 360 балки (и, следовательно, также с рамой) в точке 390 соединения стержня с рамой. Второй конец соединительного стержня 370 поворотно соединен со средней точкой тяги 372 в точке 382 соединения стержня с тягой. То есть точка 382 соединения стержня с тягой находится между точкой 384 поворота тяги с балкой и точкой 380 соединения цилиндра с тягой вдоль продольного направления тяги 372.
В этом примере, точка 384 соединения балки с тягой, точка 380 соединения цилиндра с тягой, точка 386 соединения балки с цилиндром, точка 390 соединения рамы со стержнем и точка 382 соединения стержня с тягой все являются точками поворота, так что два связанных компонента могут поворачиваться относительно друг друга. Должно быть понятно, что в других примерах одна или более из этих точек соединения могут быть жесткими соединениями, которые не допускают относительного поворотного движения, и что любое нелинейное или поворотное движение может быть приспособлено другими компонентами в приводном механизме 366.
Аккумулятор (не показан на фигурах 3А-3С) поддерживает давление текучей среды в цилиндре 368, когда взаимодействующий с землей инструмент 322 с землей находится в своем рабочем положении. Давление в цилиндре 368 пытается оттолкнуть второй конец тяги 372 от области 388 установки цилиндра так, чтобы она поворачивалась вокруг точки 382 соединения тяги со стержнем и оттолкнуть точку 384 поворота тяги с балкой назад к корпусу 360 балки. Таким образом, центральный участок 374 балки 342 смещается вдоль соединительного стержня так, что он упирается в корпус 360 балки. Следовательно, сила смещения, приложенная цилиндром 368, действует для поддержания балки 342 в ее текущем рабочем положении относительно корпуса 360 балки.
Фигуры 4А, 4В и 4С иллюстрируют защитный механизм автоотвода, когда плужный корпус 422 находится в сработавшем положении. Признаки фигур 4А и 4С, которые также показаны на фигурах 3А-3С, будут обозначены соответствующими ссылочными номерами в последовательности 400 и не обязательно будут описаны снова. Фигуры 4А и 4С также показывают аккумулятор 495, который соединен с цилиндром 468 шлангом 496, так что он поддерживает давление текучей среды в цилиндре 468.
На фигурах 4А-4С, плужный корпус 422е натолкнулся на камень, что привело к высокой реактивной силе 467 на плужный корпус 422, когда он находился в своем рабочем положении. Как будет обсуждаться ниже, эта высокая реактивная сила 467 больше, чем сила смещения, которая создается цилиндром 468, так что балка 442 поворачивается вокруг первой точки 462 поворота, и корпус 422 плуга перемещается с пути камня. Более конкретно, поскольку реактивная сила 467 всегда будет испытываться нижним используемым плужным корпусом, балка 442 всегда будет поворачиваться вокруг верхней точки поворота. Следовательно, если плуг был во второй конфигурации так, что второе плечо 478 балки было обращено вниз, балка 442 поворачивалась бы вокруг второй точки 464 поворота (которая была бы верхней точкой поворота) при столкновении с камнем.
Когда балка 442 поворачивается вокруг первой точки 462 поворота, вторая точка 464 поворота отделяется, и часть балки 442 удаляется от корпуса 460 балки. Первый конец соединительного стержня 470 соединен с корпусом 460 балки в точке 490 соединения стержня с рамой, так что центральный участок 474 балки 442 перемещается вдоль соединительного стержня 470 в направлении тяги 472. Поскольку второй конец соединительного стержня 470 соединен со средней точкой тяги 472 в точке 482 соединения тяги со стержнем, тяга 472 поворачивается вокруг точки 482 соединения тяги со стержнем. По мере поворота тяги 472, второй конец тяги 472 (а, следовательно, и точка 480 соединения тяги с цилиндром) перемещается ближе к точке 486 соединения балки с цилиндром. Когда точка 480 соединения тяги с цилиндром перемещается ближе к точке 486 соединения балки с цилиндром, цилиндр 468 сжимается. Таким образом, балка 442 может поворачиваться только вокруг первой точки 462 поворота, когда реактивная сила 467 на плужный корпус 422 приводит к усилию на цилиндр 468, приложенному тягой 472, которое больше, чем сила смещения, которая обеспечивается текучей средой в цилиндре 468.
Фиг. 5 показывает пример сельскохозяйственной системы 500 согласно настоящему изобретению. Сельскохозяйственная система 500 включает в себя плуг 510 и трактор 507. В этом примере трактор 507 буксирует плуг 510, хотя он также может толкать плуг 510. Сельскохозяйственная система 500 включает в себя систему 599 определения местоположения и контроллер 597. В этом примере система 599 определения местоположения представляет собой GPS. Система 599 определения местоположения и контроллер 597 показаны на фиг. 5 как расположенные на тракторе 507. Однако из описания следует понимать, что вместо этого система 599 определения местоположения и/или контроллер 597 могут быть расположены на плуге 510. Кроме того, функциональность контроллера 597 может обеспечиваться одним или более процессорами, которые расположены вместе с одним или обоими из плуга 510 и трактора 507, или могут быть расположены удаленно от трактора 507 и плуга 510.
В этом примере, плуг 510 включает в себя один или более датчиков срабатывания (не показаны), которые могут обеспечивать данные срабатывания. Датчик срабатывания может предоставлять данные срабатывания в контроллер 597. Датчик срабатывания может прямо или косвенно контролировать положение одного или более или всех плужных корпусов 522 и/или скорость, с которой плужный корпус 522 оставляет свое рабочее положение.
Данные срабатывания могут быть обеспечены контроллеру 597 в ответ на срабатывания защитного механизма автоотвода, действующего, как это определено в некоторых примерах. В других примерах, данные срабатывания могут быть сохранены в памяти, которая находится в электронной связи с датчиком срабатывания, и затем переданы в контроллер 597 для последующей обработки. В таком примере, временная метка, связанная с данными срабатывания, также может храниться в памяти. Затем контроллер 597 может принимать данные срабатывания, относящиеся ко всему полю в конце операции вспашки.
Система 599 определения местоположения может обеспечивать данные местоположения в контроллер 597. В некоторых примерах, система определения местоположения может быть связана с плугом 510 и/или трактором 507. Опять же, система 599 определения местоположения может предоставлять данные местоположения в контроллер 597 в режиме реального времени, когда плуг 510 перемещается по полю, или может быть сохранена в памяти вместе с соответствующими временными метками для последующей связи с контроллером 597.
Контроллер 597 может применять математическую операцию к полученным данным местоположения, чтобы определить одно или более местоположений плужных корпусов, которые представляют местоположение одного или более отдельных плужных корпусов 522 плуга 510. Например, контроллер 597 может использовать заранее определенное смещение между: (i) местоположением системы 599 определения местоположения; и (ii) местоположением одного или более отдельных плужных корпусов 522 для определения местоположения плужного корпуса. Контроллер 597 также может использовать направление движения системы 599 определения местоположения/трактора 507, чтобы применить отклонения в правильном направлении. Таким образом, единственная система 599 определения местоположения может использоваться для множества плужных корпусов 522. В качестве альтернативы, может быть предусмотрена система определения местоположения для отдельного плужного корпуса 522.
В некоторых примерах, система 599 определения местоположения может включать в себя передатчик пути или датчик скорости (в качестве неограничивающих примеров дополнительных компонентов), которые могут использоваться с GPS для получения более точных данных местоположения.
Когда контроллер 597 принимает данные срабатывания от датчика срабатывания, он может сохранить связанные данные местоположения в памяти как местоположение срабатывания. В примерах, в которых данные о местоположении и данные срабатывания хранятся в памяти вместе с соответствующими временными метками, контроллер может определить данные о местоположении, которые связаны с полученными данными срабатывания посредством поиска местоположения трактора/плуга во время, когда срабатывание произошло. В некоторых примерах, контроллер 597 может определить, какой из множества плужных корпусов 522 сработал на основании данных срабатывания. Например, данные срабатывания могут включать в себя идентификатор плужного корпуса, который указывает, какой плужный корпус сработал. Затем контроллер 597 может определять местоположения срабатывания плужного корпуса (которые являются местоположением конкретных плужных корпусов, которые сработали) на основании принятых данных местоположения. Местоположение срабатывания плужного корпуса является примером местоположения срабатывания. Таким образом, память может хранить географическую информацию, которая относится к тому, где в поле сработал защитный механизм автоотвода и, следовательно, может идентифицировать местоположение камней/препятствий в поле. В некоторых примерах, контроллер 597 также может хранить идентификатор срабатывания в памяти. Идентификатор срабатывания может быть уникальным идентификатором, который связан с местоположением срабатывания, которое хранится в памяти.
Предпочтительно, местоположения срабатывания (такие как местоположения срабатывания плужного корпуса), которые хранятся в памяти, могут использоваться для создания карты поля, в котором работал плуг 510. Карта может включать в себя идентификаторы местоположений камней/препятствий на основе местоположений срабатывания в памяти. Карта может быть использована вручную или автоматически для последующей сельскохозяйственной операции в поле, так что камни/препятствия могут быть приняты во внимание. Например, можно создать маршрут через поле, чтобы избежать камней/препятствий. Кроме того, один или более рабочих параметров сельскохозяйственной машины могут контролироваться вручную или автоматически во время последующей сельскохозяйственной операции для учета местоположения камней/препятствий. Дополнительные детали представлены ниже.
В некоторых примерах, данные срабатывания могут просто принимать двоичное число, которое указывает, произошло или нет срабатывание. Например, данные срабатывания могут быть установлены для числа «1», когда происходит срабатывание. Такое срабатывание может быть обнаружено датчиком, который определяет, что плужный корпус переместился более чем на пороговую величину относительно силы смещения защитного механизма автоотвода. Такой датчик может быть связан с цилиндром защитного механизма автоотвода. Таким образом, данные отключения могут быть реализованы в виде простой указательной метки. Альтернативно, данные срабатывания могут принимать одно из множества значений, когда происходит срабатывание. Например, данные срабатывания могут упоминаться как данные глубины срабатывания, которые представляют глубину плужного корпуса во время срабатывания. В одном примере, данные о глубине срабатывания могут обеспечиваться датчиком, который контролирует положение цилиндра, который является частью механизма автоотвода от камней. Таким образом, данные срабатывания могут представлять глубину камня, что может быть полезно в последующей сельскохозяйственной операции, как будет обсуждаться ниже.
В примерах, в которых данные срабатывания включают в себя данные о глубине срабатывания, контроллер может выгодно генерировать трехмерную карту подземных препятствий в поле, которая включает глубину каждого препятствия.
В некоторых примерах, контроллер 597 может обрабатывать данные срабатывания и сохранять один или более из следующих примеров местоположения срабатывания в памяти:
местоположение начала срабатывания, которое представляет собой данные местоположения, предоставленные системой 599 определения местоположения, когда начинается срабатывание;
местоположение прекращения срабатывания, которое представляет собой данные о местоположении, обеспечиваемые системой 599 определения местоположения, когда срабатывание заканчивается;
местоположение плужного корпуса в начале срабатывания, которое является местоположением плужного корпуса (как определено на основе данных о местоположении, обеспечиваемых системой 599 определения местоположения) плужного корпуса, когда начинается срабатывание; и
местоположение плужного корпуса при прекращении срабатывания, которое является местоположением плужного корпуса плуга (как определено на основе данных о местоположении, обеспечиваемых системой 599 определения местоположения) плужного корпуса, когда заканчивается срабатывание.
При необходимости, контроллер 597 может группировать множество отдельных местоположений срабатывания вместе, так что они связаны с одним и тем же камнем/препятствием. Например, если два местоположения срабатывания меньшими порогового расстояния друг от друга, то контроллер 597 может сгруппировать их вместе как связанные с одним и тем же камнем/препятствием. Контроллер 597 может затем приписать один и тот же идентификатор камня каждому из местоположений срабатывания, которые сгруппированы вместе. Таким образом, несколько местоположений срабатывания, которые меньше, чем пороговое расстояние по меньшей мере от одного другого местоположения срабатывания, все группируются одним и тем же идентификатором камня. В некоторых применениях, контроллер 597 может обрабатывать местоположения срабатывания, которые все связаны с одним и тем же идентификатором камня, чтобы определить одну или более координат камня, которые определяют периферию камня или препятствия. Дополнительно или в качестве альтернативы, контроллер 597 может определять координаты камня с использованием местоположения начала срабатывания и местоположения прекращения срабатывания (или местоположения начала срабатывания плужного корпуса и положения прекращения срабатывания плужного корпуса).
Фиг. 6 схематично иллюстрирует, как сохраненные местоположения срабатывания могут быть использованы в последующей сельскохозяйственной операции. Фиг. 6 иллюстрирует операцию вспашки как последующую сельскохозяйственную операцию. Должно быть понятно, что в других примерах могут быть выполнены последующие сельскохозяйственные операции различных типов, включая любой другой тип обработки почвы, операции пакетирования и уборки урожая, в качестве неограничивающих примеров.
Фиг. 6 показывает поле 603, в котором расположены три подземных камня (или другие препятствия) 640, 641, 642. Как обсуждалось выше, более ранняя операция вспашки в поле привела к срабатыванию защитных механизмов автоотвода на плуге, когда плужные корпуса столкнулись с камнями 640, 641, 642. Местоположения плужных корпусов, когда были задействованы соответствующие защитные механизмы автоотвода, сохранены в памяти как местоположения срабатывания. Эти местоположения срабатывания могут быть отображены на карте в кабине трактора 607. Карта может отображать ту же информацию, которая показана на фиг.6, возможно, включая текущее местоположение трактора 607 и плуга 610. Это может помочь оператору увидеть, где находятся камни/препятствия во время работы на поле.
Фиг. 7 схематично показывает часть сельскохозяйственной системы, которая включает сельскохозяйственное орудие, такое как плуг, который может быть использован для выполнения последующей сельскохозяйственной операции. Сельскохозяйственная система включает в себя контроллер 797 и привод 766. Привод 766 может быть любым компонентом, который управляет работой сельскохозяйственного орудия. В одном примере, привод 766 может быть частью механизма автоотвода от камней, который обеспечивает силу смещения для плужного корпуса, так что он смещается в рабочее положение. Привод 766 может быть таким же, как тот, который описан со ссылкой на фигуры 3А, 3В, 3С, 4А, 4В и 4С, или может быть другим. Примеры других приводов 766, которые могут быть использованы, описаны ниже.
Контроллер 797 принимает данные 773 местоположения орудия и одно или более местоположений 771 срабатывания из памяти. Данные 773 местоположения орудия представляют текущее местоположение сельскохозяйственного орудия. Данные о местоположении орудия могут быть приняты из системы определения местоположения, которая связана с сельскохозяйственным орудием и/или связанным сельскохозяйственным транспортным средством, таким же образом, как описано выше. Контроллер 797 может обрабатывать данные 773 местоположения орудия и одно или более местоположений 771 срабатывания, сохраненных в памяти, чтобы определить, следует ли подавать сигнал 765 управления приводом для привода 766. Сигнал 765 управления приводом предназначен для управления работой привода 766
В примере, где привод 766 представляет собой привод срабатывания от камней, такой как привод 366 на фиг. 3, сигнал 765 управления приводом может уменьшить силу смещения, которая создается приводом для срабатывания от камней, на основе заданного отношение между данными 773 местоположения орудия и местоположением 771 срабатывания. Примером такого заранее определенного отношения является результат сравнения между (i) разницей между данными 773 местоположения орудия и местоположением 771 срабатывания и (ii) порогом расстояния. В некоторых примерах, контроллер 797 может определять и принимать во внимание направление движения сельскохозяйственного орудия как часть заранее определенного отношения для определения, является ли столкновение вероятным и, следовательно, уменьшать или нет силу смещения. Если такие отношения удовлетворены, то сельскохозяйственное орудие можно рассматривать как находящийся поблизости от камня/препятствия. Может быть предпочтительным уменьшить силу смещения до ожидаемого столкновения с камнем/препятствием, чтобы взаимодействующий с землей инструмент мог легче сработать. Это может снизить вероятность того, что взаимодействующий с землей инструмент будет поврежден камнем/препятствием.
Таким образом, контроллер 797 обеспечивает сигнал 765 управления приводом в привод 766, чтобы автоматически устанавливать уровень силы смещения, который обеспечивается приводом 766. Таким образом, привод 766 может быть установлен таким образом, что производительность сельскохозяйственного орудия улучшается. Например, в примерах, где привод 766 представляет собой механизм автоотвода от камней для плуга, механизм автоотвода от камней может управляться так, что он срабатывает при соответствующей реактивной силе, которой подвергается плужный корпус. Это может включать зарядку аккумулятора, который показан на фиг .4А, так что он устанавливает уровень давления в цилиндре на основании местоположения 771 срабатывания. Таким образом: (i) может быть легче отключить механизм автоотвода камня, когда он сталкивается с камнем в известном месте, что снижает вероятность повреждения плужного корпуса; (ii) это может снизить вероятность случая ложного срабатывания, когда камень отсутствует; и/или (iii) это может снизить вероятность того, что плужный корпус не сработает при встрече с камнем.
Контроллер 797 может обрабатывать данные 773 местоположения орудия и одно или более местоположений 771 срабатывания, так что контроллер автоматически уменьшает силу смещения, прикладываемую защитным механизмом автоотвода в заданной (виртуальной) области. Если сила смещения уменьшается настолько, что реактивная сила, испытываемая плужным корпусом при его перемещении через почву, больше, чем сила смещения, то плужный корпус будет автоматически подниматься, так что рабочая глубина плужного корпуса уменьшается для того, чтобы плужный корпус избегал попадания камня (или другого препятствия, например, дренажного колодца). В качестве альтернативы, если сила смещения не превышает реактивную силу (но, тем не менее, уменьшается), то защитный механизм автоотвода может сработать легче, когда плужный корпус действительно сталкивается с камнем.
Местоположения 771 срабатывания могут рассматриваться как определяющие виртуальные запрещенные зоны в поле. Привод 766 можно рассматривать как работающий в качестве участка управления, который позволяет извлекать плужный корпус из почвы таким образом, чтобы он волочился по поверхности в определенных местах поля, чтобы улучшить качество сельскохозяйственной работы и/или уменьшить вероятность повреждения плужного корпуса.
Примеры других приводов 766, которые могут автоматически управляться сигналом 765 управления приводом, включают в себя:
Привод регулировки ширины плуга (70, фиг. 1С) для перемещения плужных корпусов в поперечном направлении. Привод регулировки ширины плуга может перемещать один или более плужных корпусов в поперечном направлении, или по отдельности, или вместе. В некоторых случаях это может позволить упреждающему перемещению плужного корпуса с пути камня/препятствия, которое представлено местоположением срабатывания.
Привод регулировки глубины, для регулировки рабочей глубины одного или более из множества плужных корпусов. Это может быть гидравлический цилиндр, соединенный с тягой 62, предусмотренной между колесом 20 орудия и основной рамой 12, показанной на фиг. 1В. Привод регулировки глубины может также включать в себя тягу на тракторе, которая может регулировать высоту переднего конца плуга относительно трактора. В качестве альтернативы, это могут быть гидравлические приводы, расположенные между одним или более плужными корпусами и основной рамой для индивидуальной регулировки расстояния между этими плужными корпусами и основной рамой. Привод регулировки глубины может регулировать рабочую глубину одного или более плужных корпусов по отдельности или вместе. Опять же, это может дать возможность заблаговременно перемещать плужный корпус с пути камня/препятствия, которое представлено местоположением срабатывания. В примерах, в которых данные срабатывания включают в себя данные о глубине срабатывания, привод регулировки глубины может быть управляем так, что рабочая глубина одного или более плужных корпусов уменьшается так, что она становится меньше глубины препятствия.
Привод переворачивания для переворачивания сельскохозяйственного орудия. Хотя это и не может быть специально получено из какой-либо из фигур, такой привод для переворачивания может представлять собой гидравлический цилиндр, расположенный на передней части сельскохозяйственного орудия и подходящий для перемещения (т.е. переворачивания) оборотного пашущего орудия между его первой и его второй конфигурациями, описанными выше. В некоторых примерах, привод переворачивания может быть управляем так, чтобы рабочая глубина плужных корпусов была уменьшена вблизи камня/препятствия.
Привод предплужника для регулировки рабочей глубины одного или более предплужников. Это может позволить упреждающему перемещению предплужника с пути камня/препятствия, которое представлено местоположением срабатывания.
Привод угла плужного корпуса для регулировки угла атаки плужного корпуса. Это может позволить уменьшить угол атаки плужного корпуса при приближении к камню, чтобы плужный корпус мог легче подниматься в почве, чтобы избежать камня.
Привод приведения в действие, который обеспечивает движущую силу для сельскохозяйственного орудия. Привод приведения в действие может быть двигателем трактора, который буксирует или толкает сельскохозяйственное орудие, или двигателем или мотором, расположенным на самоходном сельскохозяйственном орудии. Например, сигнал 765 управления приводом может привести к замедлению сельскохозяйственного орудия вблизи камня/препятствия, чтобы снизить вероятность повреждения сельскохозяйственного орудия камнем/препятствием. Это может быть особенно полезно, если сельскохозяйственное орудие движется автономно.
Рулевой привод, который контролирует направление движения сельскохозяйственного орудия. Рулевой привод может быть связан с трактором, который буксирует или толкает сельскохозяйственное орудие, или может быть расположен на сельскохозяйственном орудии. Например, сигнал 765 управления приводом может заставить сельскохозяйственное орудие поворачиваться вокруг камня/препятствия, чтобы уменьшить вероятность повреждения сельскохозяйственного орудия камнем/препятствием. Это также может быть особенно полезно, если сельскохозяйственное орудие движется автономно.
Фиг. 8 иллюстрирует другой пример сельскохозяйственной системы по настоящему изобретению. Фиг. 8 показывает плуг 810, который обеспечивает данные 812 события и соответствующее местоположение 814 события в память 816. Память 816 может быть совмещена с плугом 810 или может быть удалена от него. Например, плуг может обеспечивать данные 812 события и местоположение 814 события в память 816 по сети, такой как Интернет. При необходимости, контроллер (не показан) может генерировать карту 818 из данных 812 события и ассоциированного местоположения 814 события, которые хранятся в памяти 816.
Сельскохозяйственное орудие 840 может извлекать данные 812 события и местоположение 814 события из памяти и использовать эти данные для управления приводом 866, связанным с сельскохозяйственным орудием 840. Аналогично контроллеру, показанному на фиг. 7, контроллер 897, связанный с сельскохозяйственным орудием 840, может обрабатывать данные 812 события и местоположение 814 события вместе с данными 873 местоположения орудия (например, обеспеченными GPS 867) для того, чтобы обеспечить сигнал 865 управления приводом для привода 866. Сельскохозяйственное орудие 840 может быть любым типом сельскохозяйственного орудия и может быть или не быть плугом. Привод 866 может быть приводом любого известного типа для регулировки рабочего параметра сельскохозяйственного орудия 840, включая те, которые раскрыты в другом месте в этом документе.
Одним примером данных 812 события являются данные срабатывания, а примером связанного местоположения события является местоположение срабатывания, как описано выше. Однако, в этом примере данные события не ограничиваются только событиями срабатывания. Другие типы событий, которые могут быть записаны вместо или в дополнение к событиям срабатывания, включают:
событие отказа срезного болта и связанное с ним местоположение отказа срезного болта. Срезной болт в плуге 810 может сломаться, когда плуг 810 испытывает сложные условия или если плужный корпус испытывает камень/препятствие, которое не вызывает срабатывания защитного механизма автоотвода.
событие проскальзывания колеса, которое запускается, когда датчик проскальзывания колеса измеряет степень проскальзывания колеса, испытываемую колесом сельскохозяйственного орудия и/или соответствующего сельскохозяйственного транспортного средства, больше пороговой величины.
событие состояния почвы, когда состояние почвы превышает порог почвы. Например, датчик почвы может обеспечивать данные о почве, которые представляют одну или более характеристик почвы, которая должна обрабатываться сельскохозяйственным орудием. Неограничивающие примеры включают в себя:
событие влажности почвы, которое запускается, когда измеренные данные влажности почвы превышают пороговое значение. Данные о влажности почвы представляют уровень влажности почвы. Примером реализации датчика влажности почвы является микроволновый радар. Один или более приводов 866 сельскохозяйственного орудия 840 могут автоматически управляться для улучшения работы сельскохозяйственного орудия 840 для особенно влажной почвы.
событие уплотнения почвы, которое запускается, когда измеренные данные уплотнения почвы превышают пороговое значение. Данные об уплотнении почвы представляют уплотнение /плотность почвы. Радар является одним из примеров датчика, который может обеспечивать данные об уплотнении почвы. Один или более приводов 866 сельскохозяйственного орудия 840 могут автоматически управляться для улучшения работы сельскохозяйственного орудия 840 для особенно уплотненной почвы.
прогнозируемое событие уплотнения почвы, которое связано с расположением колес или гусениц сельскохозяйственного транспортного средства при его движении по полю. Такое событие может быть запущено, когда сельскохозяйственное транспортное средство движется по полю. Это может быть особенно актуально, когда сельскохозяйственное транспортное средство является тяжелым, например, зерноуборочным комбайном, поскольку это значительно повлияет на уплотнение почвы. Такое прогнозируемое событие уплотнения почвы не обязательно должно непосредственно измерять свойства почвы, но вместо этого может быть вызвано местоположением сельскохозяйственного транспортного средства на основе предположения, что сельскохозяйственное транспортное средство будет уплотнять почву.
событие, связанное с урожаем, когда условие, относящееся к урожаю превышает порог урожая. Например, датчик урожая может обеспечивать данные об урожае, которые представляют одну или более характеристик урожая, который должен обрабатываться сельскохозяйственным орудием. Неограничивающие примеры включают в себя:
событие остатков урожая, которое запускается, когда измеренные данные об остатках урожая превышают пороговое значение. Данные об остатках урожая представляют свойства остатка урожая, который остается на почве после сельскохозяйственной операции. Радар или камера представляют собой два примера датчиков, которые могут обеспечивать данные об остатках урожая. Один или более приводов 866 сельскохозяйственного орудия 840 могут автоматически управляться для улучшения работы сельскохозяйственного орудия 840 для особенно уплотненной почвы.
событие собранного урожая, которое запускается, когда количество собранного урожая превышает верхний порог или падает ниже нижнего порога. Если в определенном районе наблюдается относительно низкий процент урожая, то его можно рассматривать как связанный с одним или более из следующих факторов: недостаток питательных веществ; недостаточная глубина почвы для хорошего развития корней, наличие сорняков. Одна или более из этих потенциальных причин на глубину плуга и/или ширину борозды. Ширина борозды и/или глубина борозды могут влиять на то, как почва поворачивается и разваливается, и насколько большая часть (сорняков) корней обрезается лемехом плуга.
Может быть, полезно записать расположение таких событий в памяти. Например, оператор сельскохозяйственного орудия 840, который выполняет последующую сельскохозяйственную операцию, может обращаться к соответствующей карте 818 и проявлять особую осторожность при приближении к месту, где ранее произошло событие.
Дополнительно или альтернативно, контроллер 897 может обрабатывать вышеприведенные типы данных события одним или более из следующих способов:
заставить приводной механизм замедлять сельскохозяйственный орудие 840, например, когда он приближается к месту, в котором ранее был сломан срезной болт, как было определено по событию отказа срезного болта;
заставить привод приведения в действие замедлять сельскохозяйственное орудие 840, например, когда оно приближается к месту, в котором ранее произошло проскальзывание колеса, как определено событием проскальзывания колеса;
установить силу смещения, прикладываемую защитным приводом автоотвода. Это может быть основано на данных проскальзывания колеса, например, используя уравнение или справочную таблицу, или применяя один или более порогов проскальзывания колеса. Таким образом, более высокие силы смещения могут применяться для более высоких степеней проскальзывания колеса на основе того, что реактивная сила, испытываемая взаимодействующим с землей инструментом, может способствовать ограничению поступательного движения сельскохозяйственного орудия и, следовательно, также нежелательному проскальзыванию колеса. Реактивная сила (сопротивление), испытываемая плужным корпусом, может быть ниже, когда он находится в рабочем положении. Если плужный корпус начинает смещаться (и находится под углом относительно своего рабочего положения), то может возникнуть более высокая реактивная сила (сопротивление) из-за более агрессивного наклона корпуса к почве;
установить силу смещения, прикладываемую защитным приводом автоотвода. Это может быть основано на данных влажности почвы, например, используя уравнение или справочную таблицу, или применяя один или более порогов влажности почвы. Таким образом, более низкие силы смещения могут быть применены для почв с более высокой влажностью на основе того, что реактивная сила, испытываемая взаимодействующим с землей инструментом, должна быть ниже для относительно влажной почвы;
установить силу смещения, прикладываемую защитным приводом автоотвода. Это может быть основано на данных уплотнения почвы, например, используя уравнение или справочную таблицу, или применяя один или более порогов уплотнения почвы. Таким образом, более высокие силы смещения могут быть применены для более уплотненных/плотных почв на основе того, что реактивная сила, испытываемая взаимодействующим с землей инструментом, должна быть выше для относительно плотной почвы;
установить рабочую глубину и/или угол одного или более предплужников. Это может быть основано на данных об остатках урожая, например, чтобы увеличить рабочую глубину предплужников, если данные об остатках урожая превышают пороговое значение, чтобы улучшить увеличение количества заглубленных остатков. Посредством изменения угла предплужника, остатки могут быть размещены улучшенным способом, например, в нижней части борозды. Например, если расстояние d увеличено на фиг. 1C, то остаткам требуется переместиться на большее расстояние, чтобы достичь дна борозды, созданной корпусом перед предплужником. Это может быть достигнуто путем автоматической установки более агрессивного угла предплужника относительно направления движения. Если количество остатков (как представлено данными об остатках урожая) слишком велико, например, превышает пороговое значение, может быть предпочтительным автоматическое изменение угла предплужника для улучшения динамического поведения почвы/потока остатков;
установить глубину плуга и/или ширину борозды на основе события уборки урожая. Как обсуждалось выше, причины низкого количества убранного урожая могут зависеть от глубины плуга и/или ширины борозды;
контролировать, выполняется или нет операция в местоположении. Например, используя данные о глубине срабатывания, контроллер 897 может определить, требует или нет операция (например, сверления, посадки или любого типа обработки) глубины, превышающей глубину препятствия (как представлено данными глубины срабатывания). Если требуемая глубина операции больше, чем данные о глубине срабатывания, то контроллер 897 может подать сигнал 865 управления приводом в привод 866, который не позволяет ему выполнять свою работу в этом месте.
Понятно, что для каждого из вышеприведенных примеров, целью автоматического управления приводом 866 является улучшение производительности операции, которая выполняется сельскохозяйственным орудием, на основе местоположений ранее записанных событий и/или ранее записанных рабочих условий. Когда привод 866 является защитным приводом автоотвода, это может включать в себя установку силы смещения для уменьшения количества ложных событий срабатывания (когда не встречается камень или другое препятствие), чтобы уменьшить число раз, когда приводной механизм не срабатывает, когда он столкнется с камнем, и/или уменьшить количество раз, когда плужный корпус повреждается камнем/препятствием. Кроме того, может быть целью установить силу смещения таким образом, чтобы взаимодействующий с землей инструмент находился в правильном рабочем положении, когда камень не встречается. То есть «нормальная» реактивная сила, которую испытывает взаимодействующий с землей инструмент, когда камень не встречается, не должна приводить к длительным событиям срабатывания.
В некоторых примерах, контроллер 897 может устанавливать уровень силы смещения, которая обеспечивается приводом 866 так, чтобы он не превышал максимальное значение силы и/или не падал ниже минимального значения силы. Особенно в отношении максимальной величины силы, это может гарантировать, что сила смещения не становится настолько высокой, что плужный корпус ломается при столкновении с камнем, а не вызывает событие срабатывания.
Одно или более из упомянутых выше пороговых значений могут быть установлены пользователем на основании того, что они подходят для поля, которое обрабатывается сельскохозяйственным орудием. Для примеров, где есть первый порог и второй порог, эти пороги могут быть одинаковыми или отличаться друг от друга.
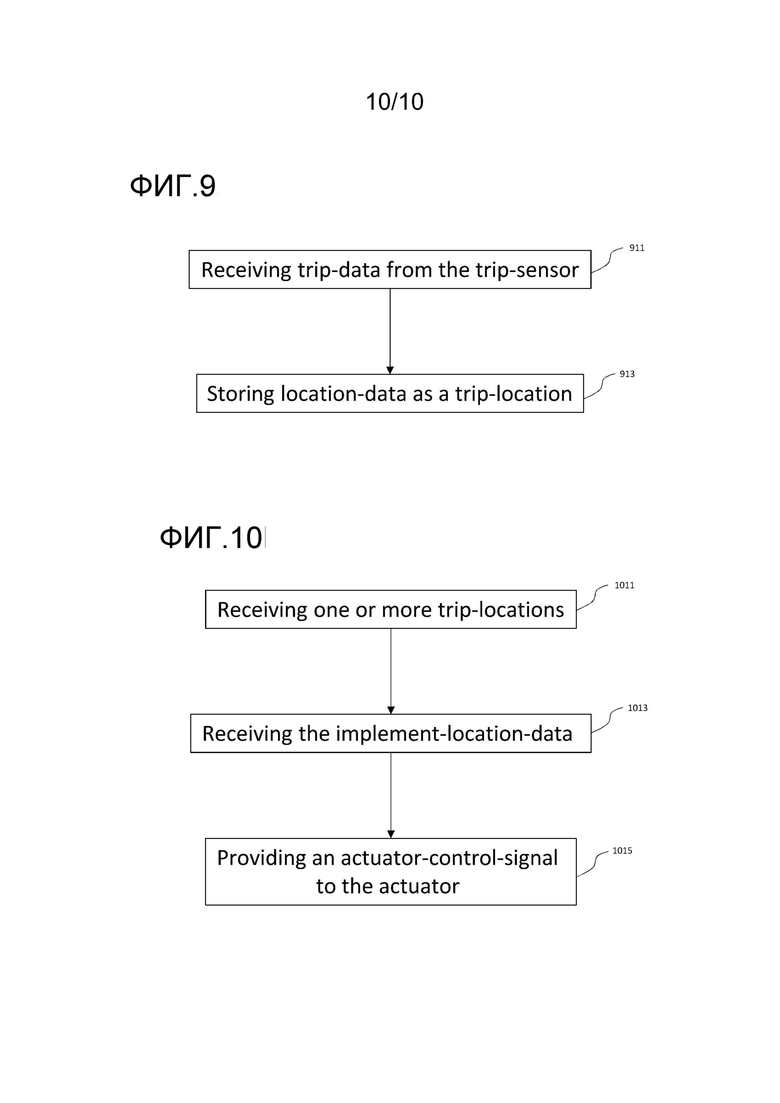
Фиг. 9 схематично иллюстрирует способ работы сельскохозяйственной системы. Как обсуждалось выше, сельскохозяйственная система может включать плуг, имеющий плужный корпус. Сельскохозяйственная система также может включать в себя защитный механизм автоотвода, датчик срабатывания и систему определения местоположения, связанную с плугом.
На этапе 911, способ включает в себя прием данных срабатывания от датчика срабатывания, который указывает, когда защитный механизм автоотвода сработал. На этапе 913, способ включает в себя сохранение данных местоположения, обеспеченные системой определения местоположения, в качестве местоположения срабатывания. Месторасположение срабатывания представляет собой местоположение плуга в момент срабатывания защитного механизма автоотвода.
Способ по фиг. 9, может, предпочтительно, позволить сохранению в памяти местоположений камней или других препятствий, которые сталкивались с плугом. Таким образом, последующая сельскохозяйственная операция на поле может быть выполнена более эффективно с учетом расположения камней/препятствий.
При необходимости, способ по фиг. 9 также может включать в себя создание карты на основе сохраненных местоположений срабатывания.
Фиг. 10 схематично иллюстрирует другой способ работы сельскохозяйственной системы. Как обсуждалось выше, сельскохозяйственная система может включать сельскохозяйственное орудие. Сельскохозяйственный орудие содержит привод для управления работой сельскохозяйственного орудия. Сельскохозяйственная система также включает в себя систему определения местоположения, которая связана с сельскохозяйственным орудием. Система определения местоположения может предоставлять данные местоположения орудия, которые представляют текущее местоположение сельскохозяйственного орудия.
На этапе 1011, способ включает в себя прием одного или более местоположений срабатывания. Одно или более мест срабатывания являются местоположениями плуга во время, когда механизм автоотвода от камней сработал в более ранней сельскохозяйственной операции. Одно или более местоположений срабатывания могут быть извлечены из памяти, которая была записана после более ранней сельскохозяйственной операции.
На этапе 1013, способ включает в себя прием данных о местоположении орудия из системы определения местоположения.
На этапе 1015, способ включает в себя обработку данных местоположения орудия и одного или более местоположений срабатывания, и подачу сигнала управления приводом на привод для того, чтобы управлять работой привода. Как обсуждалось выше, это может выгодно улучшить рабочие характеристики сельскохозяйственного орудия, поскольку в нем могут учитываться местоположения, в которых защитный механизм автоотвода срабатывал при более ранней сельскохозяйственной операции.
Хотя некоторые аспекты этого подробного описания ссылаются на плужные корпуса, следует понимать, что по меньшей мере некоторые примеры настоящего изобретения не ограничены такими взаимодействующими с землей инструментами. Скорее, в некоторых осуществлениях, любая форма взаимодействующего с землей инструмента любого сельскохозяйственного орудия может быть использована в связи с приводным механизмом и контроллером, описанным выше. Аналогично, количество и расположение взаимодействующих с землей инструментов, показанных на чертежах, не следует понимать как ограничивающие объем настоящего изобретения.
Предпочтения и варианты для данного аспекта, признака или параметра изобретения, если в контексте не указано иное, должны рассматриваться как раскрытые в комбинации с любыми и всеми предпочтениями и вариантами для всех других аспектов, признаков и параметров изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственное орудие | 2020 |
|
RU2748066C1 |
| Плуг | 2020 |
|
RU2742830C1 |
| СПОСОБ РЕГУЛИРОВКИ ГЛУБИНЫ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2020 |
|
RU2735246C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПАШУЩАЯ СИСТЕМА, СПОСОБ ЕЁ РАБОТЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2020 |
|
RU2742473C1 |
| ПЛУГ, СПОСОБ РАБОТЫ ПЛУГА, РЕАЛИЗУЕМЫЙ С ПОМОЩЬЮ КОМПЬЮТЕРА, И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА. | 2020 |
|
RU2739366C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2748065C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2742914C1 |
| КРЕПЕЖНЫЙ УЗЕЛ ДЛЯ ПРЕДПЛУЖНИКОВ ПЛУГА | 2020 |
|
RU2748067C1 |
| ПЛУГ | 2014 |
|
RU2551100C1 |
| Устройство для подготовки почвы под планировку | 1975 |
|
SU553954A1 |





Изобретение относится к сельскому хозяйству. Предложена сельскохозяйственная система, содержащая плуг, при этом плуг содержит плужный корпус; защитный механизм автоотвода, который выполнен с возможностью срабатывания, когда плужный корпус сталкивается с камнем или другим препятствием; и датчик срабатывания, выполненный с возможностью обеспечения данных срабатывания в ответ на срабатывание защитного механизма автоотвода. Систему определения местоположения, связанную с плугом, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют местоположение плуга; и контроллер, который выполнен с возможностью: приема данных срабатывания и хранения данных местоположения, обеспечиваемых системой определения местоположения, в качестве местоположения срабатывания на основе данных срабатывания, при этом местоположение срабатывания является местоположением плуга в момент срабатывания защитного механизма автоотвода. Изобретение обеспечивает высокую эффективность при использовании. 4 н. и 12 з.п. ф-лы, 10 ил.
1. Сельскохозяйственная система (500), содержащая:
плуг (510), при этом плуг (510) содержит:
плужный корпус (522);
защитный механизм автоотвода, который выполнен с возможностью срабатывания, когда плужный корпус (522) сталкивается с камнем или другим препятствием; и
датчик срабатывания, выполненный с возможностью обеспечения данных срабатывания в ответ на срабатывание защитного механизма автоотвода;
систему (599) определения местоположения, связанную с плугом (510), при этом система (599) определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют местоположение плуга (510); и
контроллер (597), который выполнен с возможностью:
приема данных срабатывания; и
хранения данных местоположения, обеспечиваемых системой определения местоположения, в качестве местоположения срабатывания на основе данных срабатывания, при этом местоположение срабатывания является местоположением плуга в момент срабатывания защитного механизма автоотвода.
2. Сельскохозяйственная система по п. 1, в которой защитный механизм автоотвода выполнен с возможностью приложения усилия смещения к плужному корпусу таким образом, что он смещается к рабочему положению.
3. Сельскохозяйственная система по п. 1 или 2, в которой датчик срабатывания выполнен с возможностью прямого или косвенного контроля положения плужного корпуса и/или скорости, с которой плужный корпус оставляет свое рабочее положение для обеспечения данных срабатывания.
4. Сельскохозяйственная система по любому из предшествующих пунктов, в которой контроллер выполнен с возможностью:
определения местоположения плужного корпуса на основании местоположения срабатывания, причем местоположение плужного корпуса представляет местоположение плужного корпуса в момент срабатывания защитного механизма автоотвода; и
сохранения местоположения плужного корпуса.
5. Сельскохозяйственная система по любому из предшествующих пунктов, в которой контроллер выполнен с возможностью:
определения того, являются ли два местоположения срабатывания меньшими порогового расстояния друг от друга, и если они являются, то приписывания одного и того же идентификатора камня каждому из двух местоположений срабатывания.
6. Сельскохозяйственная система по любому из предшествующих пунктов, в которой данные срабатывания содержат данные глубины срабатывания, которые представляют глубину плужного корпуса (522) во время срабатывания.
7. Сельскохозяйственная система (500), содержащая:
плуг, при этом плуг содержит:
привод (766), выполненный с возможностью управления работой плуга;
систему определения местоположения, связанную с плугом, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения плуга, которые представляют текущее местоположение плуга; и
контроллер (797), который выполнен с возможностью:
приема одного или более местоположений (771) срабатывания, при этом одно или более местоположений срабатывания являются местоположениями плуга (510) в момент, когда защитный механизм автоотвода сработал в более ранней сельскохозяйственной операции;
приема данных (773) о местоположении плуга; и
обработки данных (773) местоположения плуга и одного или более местоположений (771) срабатывания для того, чтобы обеспечить сигнал (765) управления приводом для привода (766) для того, чтобы управлять работой привода (766).
8. Сельскохозяйственная система по п. 7, в которой:
плуг содержит взаимодействующий с землей инструмент; и
контроллер (797), выполненный с возможностью:
определения местоположения взаимодействующего с землей инструмента на основании данных местоположения плуга, причем местоположение взаимодействующего с землей инструмента представляет текущее местоположение взаимодействующего с землей инструмента; и
обработки местоположения взаимодействующего с землей инструмента и одного или более местоположений срабатывания для того, чтобы обеспечить сигнал (765) управления приводом для привода (766) для управления работой привода (766).
9. Сельскохозяйственная система по п. 8, в которой:
плуг представляет собой плуг, при этом плуг содержит плужный корпус;
привод (766) содержит защитный привод автоотвода для приложения усилия смещения к плужному корпусу таким образом, что он смещается к рабочему положению.
сигнал (765) управления приводом выполнен с возможностью уменьшения силы смещения, которая обеспечивается защитным приводом автоотвода, на основе заданной взаимосвязи между данными (733) местоположения взаимодействующего с землей инструмента и одним или более местоположениями (711) срабатывания.
10. Сельскохозяйственная система по п. 9, в которой:
сигнал (765) управления приводом выполнен с возможностью уменьшения усилия смещения, которое обеспечивается защитным приводом автоотвода, на основе сравнения между (i) разницей между данными местоположения взаимодействующего с землей инструмента и местоположением срабатывания, и (ii) пороговым расстоянием.
11. Сельскохозяйственная система по любому из пп. 7-10, в которой плуг включает в себя плужный корпус.
12. Сельскохозяйственная система по любому из пп. 9-11, в которой привод (766) содержит:
привод регулировки ширины плуга для перемещения плужных корпусов в поперечном направлении; и/или
привод регулировки глубины для регулировки рабочей глубины плужного корпуса.
13. Сельскохозяйственная система по любому из пп. 9-12, в которой:
плуг также включает в себя предплужник; и
привод (766) содержит привод предплужника для регулировки рабочей глубины предплужника.
14. Сельскохозяйственная система по любому из пп. 9-13, в которой привод (766) содержит:
привод приведения в действие, который обеспечивает движущую силу для плуга; и/или
рулевой привод, который контролирует направление движения плуга.
15. Способ работы сельскохозяйственной системы (500), реализуемый с использованием компьютера, при этом сельскохозяйственная система (500) содержит:
плуг (510), при этом плуг (510) содержит: плужный корпус (522);
защитный механизм автоотвода, который выполнен с возможностью срабатывания, когда плужный корпус (522) сталкивается с камнем или другим препятствием;
датчик срабатывания, выполненный с возможностью обеспечения данных срабатывания в ответ на срабатывание защитного механизма автоотвода; и
систему (599) определения местоположения, связанную с плугом (510), при этом система (599) определения местоположения выполнена с возможностью обеспечения данных местоположения, которые представляют местоположение плуга;
при этом способ включает этапы, на которых:
принимают данные срабатывания при срабатывании защитного механизма автоотвода;
хранят данные местоположения, обеспечиваемые системой определения местоположения, в качестве местоположения срабатывания на основе данных срабатывания, при этом местоположение срабатывания является местоположением плуга в момент срабатывания защитного механизма автоотвода; и
используют компьютер для осуществления работы сельскохозяйственной системы.
16. Способ работы сельскохозяйственной системы, реализуемый с использованием компьютера, при этом сельскохозяйственная система содержит:
плуг, при этом плуг содержит:
привод (766), выполненный с возможностью управления работой плуга;
систему определения местоположения, связанную с плугом, при этом система определения местоположения выполнена с возможностью обеспечения данных местоположения плуга, которые представляют текущее местоположение плуга; и
при этом способ включает этапы, на которых:
принимают одно или более местоположений (771) срабатывания, при этом одно или более местоположений срабатывания являются местоположениями плуга (510) в момент, когда защитный механизм автоотвода сработал в более ранней сельскохозяйственной операции;
принимают данные (773) о местоположении плуга;
обеспечивают сигнал (765) управления приводом для привода (766) для того, чтобы управлять работой привода (766) на основании данных (773) местоположения плуга и одного или более местоположений (771) срабатывания; и
используют компьютер для осуществления работы сельскохозяйственной системы.
| УСОВЕРШЕНСТВОВАННЫЙ ПЛУГ | 2013 |
|
RU2635931C2 |
| Автоматическое телефонное устройство | 1927 |
|
SU17395A1 |
| Устройство для измерения вибраций резцов при точении | 1960 |
|
SU131934A1 |
| DE 3019348 C2, 30.08.1990 | |||
| CN 201072894 Y, 18.06.2008. | |||

