УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к способу регулировки глубины обработки сельскохозяйственного плуга, в частности, но не исключительно, пашущего орудия. Другие аспекты настоящего изобретения относятся к сельскохозяйственному плугу, в частности, но не исключительно, к плужному орудию.
В сельском хозяйстве повторяются аграрные циклы, которые могут быть приближенно подразделены на разные этапы подготовки земли, посева, внесения удобрений, орошения, выращивания сельскохозяйственной культуры, и уборки урожая. Каждый из этих этапов является критическим для получения оптимальных результатов сбора урожая и обеспечения требуемых доходов от первоначальных инвестиций. Из перечисленных этапов, подготовка земли обычно дополнительно подразделяется на этапы, при необходимости, очистки от препятствий (например, кустарника, камней и скальных пород) и последующей обработки почвы.
Обработка почвы раздробляет и разрыхляет почву, улучшает структуру почвы и вводит в почву растительные остатки и компост, в результате чего земля удобряется. Улучшенная структура почвы обеспечивает увеличенный рост корней растений, аэрацию почвы и проникновение/фильтрацию воды. Все это приводит к более высоким урожаям, лучшему долгосрочному плодородию почвы, удерживанию влаги в почве, и уничтожению сорняков. Обработка почвы может быть подразделена на первичную (относительно глубокую) и вторичную (относительно неглубокую) обработку почвы. При первичной обработке почвы, такой как вспашка, почва переворачивается таким образом, что питательные вещества подходят к поверхности. Дополнительно к вспашке земли для доставки свежих питательных веществ наверх и осаждения растительных остатков ниже, где они будут разлагаться, этот процесс также аэрирует землю, что позволяет ей удерживать больше влаги. Подготовка земли на большую глубину создает более грубую конечную поверхность, чем вторичная обработка почвы. Вторичная обработка почвы (например, предпосевная обработка) разбивает комья земли на меньшие массы, которые могут потребоваться для малых семян или растений, которые имеют минимальную способность перемещать комья.
Первичная обработка почвы и, в частности, вспашка, по праву считается одним из наиболее эффективных путей для предотвращения заболеваний сельскохозяйственных культур, борьбы с сорняками и борьбы с мышами и другими вредителями. В своей простейшей форме оборотный плуг, также известный как отвальный плуг, включает в себя множество плужных корпусов, которые являются лезвиями для проникновения и переворачивания почвы во множествах смежных канавок, известных как борозды. Современные плуги обычно включают в себя множество плужных корпусов, соединенных с рамой плуга таким образом, что они поперечно смещены друг от друга при применении плуга. Каждый плужный корпус соединен с рамой плуга через соответствующие балки. Рама плуга, в свою очередь, соединена с буксирующим или толкающим транспортным средством через сцепное устройство, расположенное на переднем или заднем конце рамы.
Глубина обработки плужных корпусов может быть отрегулирована в зависимости от плотности почвы. Например, глубина обработки плужных корпусов может быть малой в более твердых (плотных) почвах, в то время как большая глубина обработки может быть использована в более мягких (менее плотных) почвах. Плужные корпуса могут быть жестко прикреплены к основной раме таким образом, чтобы расстояние до них от основной рамы оставалось постоянным. Соответственно, глубина обработки плугов тогда регулируется посредством изменения просвета под основной рамой. Если основная рама будет переведена ближе к поверхности земли, то просвет уменьшится, и плужные корпуса будут глубже проникать в почву. Подобным образом, если основная рама будет поднята дальше от земли, то просвет увеличится, и плужные корпуса вытянутся из почвы, в результате чего глубина обработки уменьшится.
Просветом под основной рамой можно управлять, например, посредством одного или нескольких опорных колес. Упомянутые одно или более опорных колес могут быть соединены с любой частью основной рамы, например, с задним концом основной рамы. Регулируемый рычажный механизм может быть обеспечен между основной рамой и опорным колесом для обеспечения возможности изменять расстояние между опорным колесом и основной рамой. Во время вспашки, опорное колесо движется по поверхности земли и удерживает вес плуга. Если расстояние между опорным колесом и основной рамой уменьшается, то тогда, соответственно, уменьшается просвет между основной рамой и поверхностью земли. С другой стороны, если расстояние между опорным колесом и основной рамой увеличивается, то просвет под основной рамой увеличивается. Как указано выше, изменение просвета под основной рамой приводит к изменению глубины вспашки.
При выполнении операции вспашки, важно создавать однородный слой вспаханной почвы на правильной глубине по всему полю для образования надлежащего основания для последующей обработки почвы или операций посадки. При установке слишком большой глубины обработки плужных корпусов, результирующие борозды будут оставаться открытыми, что будет вызывать нежелательный рост сорняков, и увеличится расход топлива сельскохозяйственной машины. При установке слишком малой глубины вспашки плужных корпусов (например, при слишком неглубокой вспашке), сорняки не будут запахиваться на достаточную глубину, при которой семена сорняков не будут прорастать.
Обычно, глубины вспашки изменяются между 10 и 30 см, но могут быть также установлены такими, как 50 см и более с целью глубокой вспашки. В качестве руководящего принципа, глубина вспашки должна составлять около двух третей ширины борозды, но другие факторы, такие как уплотнение почвы, могут также предопределять установку глубины. Более твердые почвы могут требовать более глубокой вспашки для достаточного разрыхления уплотненной почвы и обеспечения возможности более глубокого проникновения воды в землю.
Регулировка пашущего орудия на правильную глубину вспашки является, таким образом, важной и наиболее сложной задачей при установке пашущего орудия для выполнения операции вспашки. Опытные фермеры учитывают множество параметров при принятии решения о том, какой должна быть подходящая глубина вспашки, причем некоторые из этих параметров, такие как плотность почвы или влажность поля, часто не являются легкодоступными для фермера. Даже если все требуемые параметры являются доступными, нахождение подходящей глубины вспашки часто включает в себя утомительный метод проб и ошибок.
Ввиду вышеупомянутого, в общем, существует потребность в упрощенном способе регулировки глубины вспашки или обработки пашущего орудия.
Целью настоящего изобретения является решение или по меньшей мере смягчение одной или нескольких проблем предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты и варианты осуществления настоящего изобретения обеспечивают способ регулировки глубины обработки пашущего орудия и пашущее орудие, заявленные в прилагаемой формуле изобретения.
Согласно одному аспекту настоящего изобретения, обеспечен способ регулировки глубины обработки пашущего орудия, причем пашущее орудие содержит множество взаимодействующих с землей инструментов для проникновения в почву и ее перемещения и средство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного из взаимодействующих с землей инструментов, причем способ включает этапы, на которых:
принимают управляющие данные, указывающие на по меньшей мере одно из операции пашущего орудия или состояния поля, через которое пашущее орудие перемещается; и
автоматически управляют операцией средства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе принимаемых управляющих данных.
Другими словами, способ настоящего изобретения обеспечивает автоматическое управление глубиной плуга на основе информации, которая может относиться либо к операции самого пашущего орудия, либо к состоянию поля, через которое пашущее орудие перемещается. Управляющие данные, принимаемые, например, блоком управления, могут включать в себя множество параметров, которые относятся либо к самому плужному орудию, либо к полю. Согласно этому способу, оператору больше не нужно учитывать различные параметры, которые могут влиять на глубину обработки. Напротив, упомянутый способ автоматически изменяет глубину обработки плужных корпусов на основе одного или нескольких параметров.
В одном варианте осуществления пашущее орудие содержит множество устройств регулировки глубины, причем каждое устройство регулировки глубины выполнено с возможностью независимого регулирования глубины обработки по меньшей мере одного из множества взаимодействующих с землей инструментов, и причем этап автоматического управления операцией устройства регулировки глубины включает этап, на котором управляют операциями двух или более устройств регулировки глубины таким образом, чтобы глубины обработки двух или более из множества взаимодействующих с землей инструментов изменялись независимо друг от друга.
В одном варианте осуществления управляющие данные содержат данные поля, связанные с предыдущими состояниями поля. Согласно этому варианту осуществления регулировка глубины обработки не основывается на оперативных данных, определяемых во время операции пашущего орудия. Напротив, блок управления может получать доступ к памяти или базе данных с информацией о поле (данными поля), которая была собрана перед операцией вспашки. В одном примере, предыдущие априорные данные поля могут содержать различные параметры поля (такие как уровни влажности почвы и т.д.) относительно отдельных местоположений на карте. Такие данные поля могут быть получены оператором во время предыдущих операций на том же самом поле, например, во время различных операций обработки почвы и/или посадки в течение года. Альтернативно, предыдущие данные поля могут быть доступными для загрузки и основанными на спутниковых снимках рассматриваемого поля.
Например, спутниковые снимки могут быть использованы для оценивания контуров поля перед началом операции вспашки.
Предыдущие данные поля могут также включать в себя глубину вспашки, использованную в предыдущих операциях вспашки. Способ может включать в себя этап, на котором автоматически устанавливают глубину обработки по меньшей мере одного взаимодействующего с землей инструмента равной глубине обработки, отличной от глубины обработки, использованной в предыдущих операциях вспашки. Может быть предпочтительным из года в год иметь разные глубины: в одном году небольшую глубину для экономии энергии, в следующем году большую глубину для разрыхления плотной почвы и т.д.
Управляющие данные могут содержать данные поля, указывающие на характеристики почвы ниже поверхности земли поля, через которое перемещается пашущее орудие. Примерами таких характеристик почвы могут быть влажность почвы, уровни уплотнения почвы, температура почвы, тип растительных остатков, подлежащих запахиванию, тип почвы и/или способность почвы отводить воду.
Вышеупомянутые характеристики почвы могут быть оперативными данными, которые генерируются во время операции вспашки. В частности, плуг может включать в себя один или более датчиков почвы для определения одной или нескольких характеристик почвы, когда плуг движется через поле.
Следует понимать, что вышеупомянутые характеристики почвы являются независимыми от контуров земли поля. Другими словами, способ этого варианта осуществления может управлять и потенциально изменять глубину обработки одного или нескольких взаимодействующих с землей инструментов независимо от контуров земли. Напротив, глубина обработки может быть изменена, даже когда контуры земли останутся неизменными, т.е. когда характеристики почвы (например, плотность почвы) изменяются на ровных в других отношениях почвах. Согласно другому варианту осуществления управляющие данные содержат данные поля, связанные с текущим состоянием поля, через которое перемещается пашущее орудие. Согласно этому варианту осуществления принимаемые данные поля не основываются на предыдущих состояниях поля или основываются не только на них. Напротив, управляющие данные могут быть основаны на оперативных данных, определяемых соответствующим датчиком. Для этой цели, пашущее орудие и/или соответствующее транспортное средство для сельскохозяйственных работ может иметь множество датчиков, которые пригодны для определения одного или нескольких состояний поля, описанных более подробно ниже.
В другом варианте осуществления предыдущие данные поля указывают на одно или более из:
влажности почвы;
уровней уплотнения почвы;
температуры почвы; и
контуров поля;
типа растительных остатков, подлежащих запахиванию;
типа почвы;
способности почвы отводить воду;
времени года.
В другом варианте осуществления множество возможных данных поля запоминается в базе данных и этап автоматического управления операцией устройства регулировки глубины включает в себя этапы, на которых принимают данные о местоположении пашущего орудия на поле; и используют данные о местоположении для выбора одних из возможных данных поля в качестве данных поля. В одном варианте осуществления данные о местоположении могут быть приняты GPS-устройством, расположенным на плужном орудии и/или соответствующем транспортном средстве для сельскохозяйственных работ. Данные о местоположении затем используются для поиска в базе данных данных поля, которые относятся к текущему положению пашущего орудия на поле. Другими словами, текущее положение пашущего орудия может быть сопоставлено с одними из множества возможных данных поля для нахождения данных поля, применимых к текущему положению пашущего орудия.
В другом варианте осуществления способ может включать этап, на котором находят и/или вычисляют требуемую глубину обработки для взаимодействующего с землей инструмента, соответствующую выбранным данным поля. Например, выбранные данные поля в текущем местоположении пашущего орудия могут включать в себя информацию о влажности почвы и уровнях уплотнения почвы в текущем местоположении. На основе этих двух значений данных поля, блок управления может найти требуемую глубину обработки в таблице поиска в базе данных. Альтернативно или дополнительно, блок управления может использовать заданный алгоритм для вычисления требуемой глубины обработки на основе рассматриваемой влажности и уровней уплотнения почвы.
Еще в одном варианте осуществления управляющие данные содержат данные орудия, связанные с по меньшей мере одной из операций пашущего орудия. Согласно этому варианту осуществления принимаемые управляющие данные не основываются на предыдущих состояниях поля или основываются не только на них. Напротив, управляющие данные могут быть основаны на оперативных данных, определяемых соответствующим датчиком. Для этой цели, пашущее орудие и/или соответствующее транспортное средство для сельскохозяйственных работ может иметь множество датчиков, которые пригодны для определения одного или нескольких параметров. Например, пашущее орудие и/или соответствующее транспортное средство для сельскохозяйственных работ может включать в себя один или более из датчика высоты колес, датчика скорости, датчика глубины обработки, датчиков проскальзывания колеса, и т.д.
Данные орудия могут указывать на одно или более из:
скорости пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ;
сопротивления вспашке, испытываемого пашущим орудием и/или по меньшей мере одним взаимодействующим с землей инструментом;
проскальзывания колеса, испытываемого колесом пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ.
Конечно, данные орудия могут указывать на любой другой пригодный оперативный параметр пашущего орудия, который пригоден для определения требуемой глубины обработки по меньшей мере одного взаимодействующего с землей инструмента.
Упомянутый по меньшей мере один взаимодействующий с землей инструмент может быть плужным корпусом, и упомянутый параметр может указывать на глубину борозды, создаваемой плужным корпусом. В этом примере, датчик, связанный с пашущим орудием и/или соответствующим транспортным средством для сельскохозяйственных работ, может быть датчиком изображения или любым другим датчиком для оценивания борозд, создаваемых плужными корпусами. Если глубина борозды, определяемая датчиком изображения, не является требуемой глубиной борозды, то блок управления может автоматически изменить глубину обработки одного или нескольких плужных корпусов. Конечно, в общем, можно также измерять другие параметры, которые указывают на качество борозд, создаваемых плужными корпусами, такие как ширина борозды или растительные остатки, оставшиеся незакрытыми. Любые из этих параметров качества борозд могут передаваться в качестве обратной связи блоку управления и использоваться для регулировки глубины обработки плужных корпусов соответствующим образом.
Еще в одном варианте осуществления данные поля указывают на границу между областью обработки и краем поля. GPS-датчик может быть использован для определения местоположения пашущего орудия на карте поля для определения расстояния от пашущего орудия до края поля. Если известна скорость пашущего орудия, то блок управления может определить, когда и насколько быстро следует изменить глубину обработки по меньшей мере одного взаимодействующего с землей инструмента таким образом, чтобы упомянутый по меньшей мере один взаимодействующий с землей инструмент был поднят из почвы точно на границе между областью обработки и краем поля. Если глубины обработки множества взаимодействующих с землей инструментов пашущего орудия являются регулируемыми независимо, то тогда упомянутый способ может быть использован для создания прямой границы между областью обработки и краем поля, а не более традиционной зигзагообразной структуры, часто вызываемой ступенчатым расположением плужных корпусов.
Согласно другому варианту осуществления способ включает этап, на котором находят и/или вычисляют требуемую глубину обработки, соответствующую данным орудия, определяемым посредством датчика.
Способ может включать этап, на котором идентифицируют текущую глубину обработки по меньшей мере одного взаимодействующего с землей инструмента и сравнивают текущую глубину обработки с требуемой глубиной обработки и регулируют глубину обработки по меньшей мере одного взаимодействующего с землей инструмента, когда разница между текущей и требуемой глубиной обработки превышает заданное пороговое значение или падает ниже него. Текущая глубина обработки может быть определена соответствующим датчиком, связанным с пашущим орудием и/или соответствующим транспортным средством для сельскохозяйственных работ. Альтернативно, текущая глубина обработки может быть найдена в базе данных/ памяти, которая обновляется каждый раз, когда глубина обработки взаимодействующего с землей инструмента изменяется. Пороговое значение может быть либо установлено изготовителем, либо определено оператором до и/или во время операции вспашки.
Еще в одном варианте осуществления упомянутый по меньшей мере один взаимодействующий с землей инструмент является плужным корпусом. Альтернативно, упомянутый по меньшей мере один взаимодействующий с землей инструмент может быть предплужником. В другом варианте осуществления множество взаимодействующих с землей инструментов может включать в себя как плужные корпуса, так и предплужники, причем глубина обработки как предплужников, так и плужных корпусов может быть регулируемой одним или несколькими устройствами регулировки глубины. Регулировки глубины обработки плужных корпусов и предплужников могут быть синхронизированы таким образом, чтобы - при некоторых обстоятельствах - глубины обработки предплужников регулировались после регулировки плужных корпусов, и наоборот. Например, если глубина обработки плужных корпусов увеличивается посредством опорного колеса, то может быть необходимым поднять соответствующие предплужники с тем, чтобы сохранить их глубину обработки. Другими словами, когда плужные корпуса перемещаются дальше в почву посредством опускания основной рамы, предплужники могут быть подняты относительно основной рамы для компенсации уменьшенного просвета между основной рамой и поверхностью земли.
Согласно другому варианту осуществления пашущее орудие содержит основную раму, которая является переводимой между первым состоянием, в котором первый взаимодействующий с землей инструмент находится в рабочем положении, и второй конфигурацией, в которой второй взаимодействующий с землей инструмент находится в рабочем положении, и причем этап управления операцией устройства регулировки глубины включает этап, на котором одновременно и одинаково регулируют глубину обработки первого и второго взаимодействующего с землей инструмента. Другими словами, пашущее орудие может быть обратимым плугом с первым множеством взаимодействующих с землей инструментов на одной стороне основной рамы и вторым множеством взаимодействующих с землей инструментов на второй стороне основной рамы. Первый взаимодействующий с землей инструмент, такой как плужный корпус, на первой стороне основной рамы может иметь соответствующий второй взаимодействующий с землей инструмент, такой как плужный корпус, на противоположной стороне основной рамы. Например, первый взаимодействующий с землей инструмент может быть выполнен с возможностью создавать первую борозду, если обратимое пашущее орудие находится в своей первой конфигурации, в то время как второй взаимодействующий с землей инструмент может создавать первую борозду во второй конфигурации пашущего орудия. Упомянутый способ может быть, таким образом, использован для копирования установки глубины обработки активного взаимодействующего с землей инструмента для соответствующего взаимодействующего с землей инструмента, который в данный момент является неактивным, на другой стороне основной рамы. Это будет упрощать процесс обращения пашущего орудия, поскольку правильная глубина обработки может быть уже установленной перед началом процесса обращения.
Может быть обеспечена компьютерная программа, которая, при выполнении на компьютере, заставляет компьютер конфигурировать любое устройство, включающее в себя блок управления, раскрытый здесь, или выполнять любой способ, раскрытый здесь. Компьютерная программа может быть реализацией программного средства, и в качестве компьютера может рассматриваться любое подходящее аппаратное средство, включающее в себя цифровой сигнальный процессор, микроконтроллер, и реализацию в постоянном запоминающем устройстве (read only memory - ROM), стираемом программируемом постоянном запоминающем устройстве (erasable programmable read only memory - EPROM) или электрически стираемом программируемом постоянном запоминающем устройстве (electronically erasable programmable read only memory - EEPROM), в качестве неограничивающих примеров. Программное средство может быть компонующей программой.
Компьютерная программа может быть обеспечена на компьютерно-читаемом носителе данных, который может быть физическим компьютерно-читаемым носителем данных, таким как диск или запоминающее устройство, или может быть реализован в виде транзитного сигнала. Такой транзитный сигнал может быть сигналом загрузки через сеть, включающим в себя сигнал загрузки через Интернет.
В другом аспекте настоящего изобретения предложено пашущее орудие, содержащее множество взаимодействующих с землей инструментов, включающих в себя по меньшей мере один взаимодействующий с землей инструмент для проникновения в почву и ее перемещения, и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного взаимодействующего с землей инструмента. Пашущее орудие дополнительно содержит блок управления для приема управляющих данных, указывающих на по меньшей мере одно из операции пашущего орудия или состояния поля, через которое перемещается пашущее орудие, причем блок управления выполнен с возможностью автоматического управления операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе принимаемых управляющих данных.
В другом аспекте настоящего изобретения предложена сельскохозяйственная машина, содержащая транспортное средство для сельскохозяйственных работ, такое как трактор, и любой вариант осуществления пашущего орудия, описанный выше, причем пашущее орудие соединено с передней или задней частью транспортного средства для сельскохозяйственных работ.
Согласно еще одному аспекту настоящего изобретения предложен способ регулировки глубины обработки пашущего орудия, причем пашущее орудие содержит множество взаимодействующих с землей инструментов для проникновения в почву и ее перемещения и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного из взаимодействующих с землей инструментов, причем способ включает этапы, на которых:
принимают управляющие данные, указывающие на два или более состояния поля, через которое перемещается пашущее орудие; и
автоматически управляют операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе принимаемых управляющих данных.
В одном варианте осуществления управляющие данные содержат данные о контурах земли, которые указывают на контуры земли поля, через которое перемещается пашущее орудие, и данные о почве, которые соответствуют по меньшей мере одной характеристике почвы поля.
Данные о почве могут соответствовать по меньшей мере одной характеристике почвы ниже поверхности земли поля.
В другом варианте осуществления данные о почве указывают на одно или более из:
влажности почвы;
уровней уплотнения почвы;
температуры почвы;
типа растительных остатков, подлежащих запахиванию;
типа почвы; и
способности почвы отводить воду.
Еще в одном варианте осуществления данные о почве и/или данные о контурах земли содержат оперативные данные, определяемые во время операции обработки пашущего орудия.
В другом варианте осуществления данные о контурах земли указывают на одно или более из:
продольного наклона пашущего орудия;
поперечного наклона пашущего орудия;
наклона поверхности земли поля в направлении перемещения пашущего орудия; и
наклона поверхности земли поля поперечно направлению перемещения пашущего орудия.
Согласно другому варианту осуществления множество возможных данных о контурах земли запоминается в базе данных, и этап автоматического управления операцией устройства регулировки глубины включает в себя этапы, на которых:
принимают данные о местоположении пашущего орудия на поле; и
используют данные о местоположении для выбора одних из возможных данных о контурах земли в качестве данных о контурах земли.
В другом варианте осуществления управляющие данные содержат данные орудия, связанные с операцией пашущего орудия.
Еще в одном варианте осуществления данные орудия указывают на одно или более из:
скорости пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ;
сопротивления вспашке, испытываемого пашущим орудием и/или по меньшей мере одним взаимодействующим с землей инструментом;
проскальзывания колеса, испытываемого колесом пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ;
поперечного расстояния между смежными взаимодействующими с землей инструментами пашущего орудия;
положения по меньшей мере одного из взаимодействующих с землей инструментов относительно поверхности земли поля.
Согласно другому варианту осуществления пашущее орудие содержит множество устройств регулировки глубины, причем каждое устройство регулировки глубины выполнено с возможностью независимого регулирования глубины обработки по меньшей мере одного из множества взаимодействующих с землей инструментов, и причем этап автоматического управления операцией устройства регулировки глубины включает этап, на котором управляют операциями двух или более устройств регулировки глубины таким образом, что глубины обработки двух или более из множества взаимодействующих с землей инструментов изменялись независимо друг от друга.
Способ может дополнительно включать этап, на котором находят и/или вычисляют требуемую глубину обработки, соответствующую принимаемым управляющим данным.
Согласно другому варианту осуществления способ включает этап, на котором идентифицируют текущую глубину обработки по меньшей мере одного взаимодействующего с землей инструмента и сравнивают текущую глубину обработки с требуемой глубиной обработки и регулируют глубину обработки по меньшей мере одного взаимодействующего с землей инструмента, когда разница между текущей и требуемой глубиной обработки превышает заданное пороговое значение или падает ниже него.
Упомянутый по меньшей мере один взаимодействующий с землей инструмент может быть предплужником.
В другом варианте осуществления пашущее орудие содержит основную раму, которая является переводимой между первой конфигурацией, в которой первый взаимодействующий с землей инструмент находится в рабочем положении, и второй конфигурацией, в которой второй взаимодействующий с землей инструмент находится в рабочем положении, и причем этап управления операцией устройства регулировки глубины включает этап, на котором одновременно и одинаково регулируют глубину обработки первого и второго взаимодействующего с землей инструмента.
Согласно другому аспекту настоящего изобретения предложено пашущее орудие, содержащее:
множество взаимодействующих с землей инструментов, включающих в себя по меньшей мере один взаимодействующий с землей инструмент для проникновения в почву и ее перемещения, и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного взаимодействующего с землей инструмента;
блок управления для приема управляющих данных, указывающих на два или более состояния поля, через которое перемещается пашущее орудие;
причем блок управления выполнен с возможностью автоматического управления операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе управляющих данных, принимаемых блоком управления.
Транспортное средство для сельскохозяйственных работ (или трактор) может включать в себя одно или более устройств управления, таких как, но без ограничения перечисленным, программируемые или непрограммируемые процессоры. Подобным образом, пашущее орудие может включать в себя одно или более устройств управления, таких как, но без ограничения перечисленным, программируемые или непрограммируемые процессоры. Дополнительно или альтернативно, пашущее орудие может управляться одним или несколькими устройствами управления транспортного средства для сельскохозяйственных работ. Подобным образом, транспортное средство для сельскохозяйственных работ может управляться одним или несколькими устройствами управления пашущего орудия.
Транспортное средство для сельскохозяйственных работ и/или пашущее орудие могут управляться удаленно, например, из конторы сельскохозяйственного предприятия. Соответственно, транспортное средство для сельскохозяйственных работ может включать в себя один или более интерфейсов связи для установления связи с удаленным процессором и/или удаленным контроллером. Подобным образом, пашущее орудие может включать в себя один или более интерфейсов связи для установления связи с удаленным процессором и/или удаленным контроллером.
В пределах объема этой заявки специально предполагается, что различные аспекты, варианты осуществления примеры и альтернативы, изложенные в предыдущих абзацах, и формула изобретения и/или нижеследующее описание и чертежи, и, в частности, отдельные их признаки, могут быть взяты независимо или в любой комбинации. А именно, все варианты осуществления и все признаки любого варианта осуществления могут быть объединены любым образом и/или в любой комбинации, если такие признаки являются совместимыми. Заявитель сохраняет за собой право изменять любой исходно поданный пункт формулы изобретения или подавать любой новый пункт формулы изобретения, соответственно, в том числе право изменять любой исходно поданный пункт формулы изобретения в зависимости от этого и/или включать любой признак любого другого пункта формулы изобретения, который не был исходно заявлен таким образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один или более вариантов осуществления настоящего изобретения будут теперь описаны, только в качестве примера, со ссылкой на сопутствующие чертежи, в которых:
Фиг. 1А показывает вид справа пашущего орудия с зафиксированными взаимодействующими с землей инструментами;
Фиг. 1В показывает вид слева пашущего орудия, показанного на фиг. 1А;
Фиг. 1С показывает вид сверху пашущего орудия, показанного на фиг. 1А;
Фиг. 2 показывает схематичное изображение траектории сельскохозяйственной машины в области обработки;
Фиг. 3 показывает схематичное изображение системы для регулировки глубины обработки пашущего орудия;
Фиг. 4 показывает блок-схему последовательности операций способа регулировки глубины обработки пашущего орудия согласно одному варианту осуществления настоящего изобретения;
Фиг. 5 показывает блок-схему последовательности операций способа регулировки глубины обработки пашущего орудия согласно одному варианту осуществления настоящего изобретения;
Фиг. 6 показывает блок-схему последовательности операций способа регулировки глубины обработки пашущего орудия согласно одному варианту осуществления настоящего изобретения; и
Фиг. 7 показывает схематичное изображение взаимодействующего с землей инструмента, соединенного с основной рамой пашущего орудия через четырехзвенный рычажный механизм.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1А - 1С показывают различные виды пашущего орудия, конкретно, пашущего орудия 10. Как будет более подробно описано ниже, пашущее орудие 10, показанное на фиг. 1А - 1С, является обратимым плугом.
Пашущее орудие 10 содержит основную раму 12. Основная рама 12 может быть прямоугольной или круглой трубкой, продолжающейся между присоединительной стойкой 14 на переднем конце 16 плуга по направлению к колесу 20 плуга на заднем конце 18 плуга. Основная рама 12 поддерживает множество взаимодействующих с землей инструментов.
В примере фиг. 1А - 1С, взаимодействующие с землей инструменты включают в себя плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b. Множество первых взаимодействующих с землей инструментов, т.е. плужных корпусов 22a, 24a, 26a, 28a, 30a и предплужников 32a, 34a, 36a, 38a, и 40a, расположено на первой стороне основной рамы 12. В первой конфигурации основной рамы 12, показанной на фиг. 1А - 1С, множество первых взаимодействующих с землей инструментов расположено ниже основной рамы 12.
Множество вторых взаимодействующих с землей инструментов, т.е. плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b, и 40b, расположено на второй стороне основной рамы 12, противоположно множеству первых взаимодействующих с землей инструментов. В первой конфигурации основной рамы 12, показанной на фиг. 1А - 1С, множество вторых взаимодействующих с землей инструментов расположено выше основной рамы.
Каждый из плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b соединен с основной рамой 12 посредством балок 42, 44, 46, 48, 50. Каждая из балок 42, 44, 46, 48, 50 имеет по существу Y-образную конструкцию.
Первая балка 42 поддерживает первую пару плужных корпусов 22a, 22b. Вторая балка 44 поддерживает вторую пару плужных корпусов 24a, 24b. Третья балка 46 поддерживает третью пару плужных корпусов 26a, 26b. Четвертая балка 48 поддерживает четвертую пару плужных корпусов 28a, 28b. Пятая балка 50 поддерживает пятую пару плужных корпусов 30a, 30b.
Каждый плужный корпус 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b из пар плужных корпусов выполнен с возможностью создавать борозду на поле, когда плуг буксируется сзади или толкается транспортным средством для сельскохозяйственных работ, таким как трактор. Отсюда следует, что каждый проход показанного пашущего орудия 10 через поле создает пять смежных борозд.
Первый установочный рельс 52 поддерживает первую пару предплужников 32a, 32b. Второй установочный рельс 54 поддерживает вторую пару предплужников 34a, 34b. Третий установочный рельс 56 поддерживает третью пару предплужников 36a, 36b. Четвертый установочный рельс 58 поддерживает четвертую пару предплужников 38a, 38b. Пятый установочный рельс 60 поддерживает пятую пару предплужников 40a, 40b. Предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b и/или их соответствующие установочные рельсы 52, 54, 56, 58, 60 могут быть регулируемыми относительно основной рамы 12 для изменения расстояния между предплужниками 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b и основной рамой 12. В одном примере, предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b могут быть подвижными вверх и вниз по направлению к основной раме 12 и от нее для отдельной регулировки глубины обработки каждого из предплужников 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b. Предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b могут быть регулируемыми либо вручную, либо автоматически.
Со ссылкой на фиг. 2 будет описана типичная операция сельскохозяйственной машины, содержащей трактор 7 и пашущее орудие 10. При использовании, пашущее орудие 10 буксируется в качестве приспособления (орудия) сзади сельскохозяйственного буксирующего транспортного средства (например, трактора 7). Следует понимать, что можно эквивалентно располагать пашущее орудие 10 перед трактором 7 или как перед ним, так и за ним.
Фиг. 2 показывает схематичную область 1 обработки, например, поле с сельскохозяйственной культурой, которая подразделена на основное поле 3 и края 5, 6 поля. Трактор 7 буксирует пашущее орудие 10 через основное поле 3, в общем, параллельно рядам обработки. Ряды обработки являются частью траектории 8 трактора 7 и обычно проходят параллельно длинному краю области 1 обработки. Каждый ряд обработки представляет собой отдельный проход сельскохозяйственной машины через поле между краями 5 и 6 поля. Как будет более подробно описано ниже, пятибороздной плуг, такой как иллюстративный плуг, показанный на фиг. 1А - 1С, создает всего пять борозд за один проход.
В конце каждого прохода/ ряда обработки, трактор 7 и пашущее орудие 10 используют предстоящий край 5 или 6 поля для разворота, как указано траекторией 8. В данной области техники известно, что почва краев 5, 6 поля подвергается большим уровням уплотнения почвы, поскольку она принимает больший трафик на единицу площади, чем основное поле 3. Чтобы не повреждать почву краев 5, 6 поля больше, чем необходимо, как известно, взаимодействующие с землей инструменты, такие как плужные корпуса и предплужники, поднимают из земли в положение для краев поля или переводное положение непосредственно перед достижением плугом 10 краев 5 или 6 поля, соответственно. После разворота трактора 7 и соответствующего пашущего орудия 10 на краях 5, 6 поля, взаимодействующие с землей инструменты пашущего орудия 10 снова опускают по направлению к рабочему положению для зацепления почвы основного поля 3.
На изображении фиг. 4, пашущее орудие 10 работает на основном поле 3 и, таким образом, расположено в рабочем положении. Когда пашущее орудие 10 достигает границы между краями 5/6 поля и основным полем 3, пашущее орудие 10 переводится в положение для краев поля/ переводное положение. Отсюда следует, что каждый ряд обработки начинается с регулировки плуга из переводного положения в рабочее положение и заканчивается регулировкой плуга из рабочего положения в переводное положение.
Пашущее орудие 10, показанное на фиг. 1А - 1С, является пашущим орудием полностью устанавливаемого типа. В полностью устанавливаемых плугах, когда плуг находится в своем переводном положении (на краях поля), вес плуга несет исключительно трактор. Другими словами, плуг тогда поддерживается исключительно трактором 7 через присоединительную стойку 14 и может быть поднят из земли подъемным цилиндром рычажного механизма трактора.
Во время поворотного перемещения на краях поля, пашущее орудие 10 также обращается. А именно, основная рама 12 поворачивается на 180 градусов относительно присоединительной стойки 14 для перемещения плуга из первой конфигурации во вторую конфигурацию. В своей первой конфигурации, показанной на фиг. 1А - 1С, пашущее орудие 10 установлено таким образом, что множество первых взаимодействующих с землей инструментов, т.е. плужных корпусов 22a, 24a, 26a, 28a, и 30a и предплужников 32а, 34а, 36а, 38а, 40а, каждой пары находится в контакте с почвой. Эта первая конфигурация показана на фиг. 2 и иногда также называется «левосторонней конфигурацией», поскольку большинство плужных корпусов расположено слева от трактора 7. В своей второй конфигурации (не показана), пашущее орудие 10 установлено таким образом, что множество вторых взаимодействующих с землей инструментов, т.е. плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b, 40b, находится в контакте с почвой. Эта вторая конфигурация обеспечивается после поворота основной рамы на 180 градусов таким образом, чтобы большинство плужных корпусов было тогда расположено справа от трактора (не показано). Вторую конфигурацию, поэтому, иногда также называют «правосторонней конфигурацией».
Обработка поля пашущим орудием 10 в этой первой конфигурации обеспечивает первую борозду, созданную первым плужным корпусом 22а, вторую борозду, созданную вторым плужным корпусом 24а, третью борозду, созданную третьим плужным корпусом 26а, четвертую борозду, созданную четвертым плужным корпусом 28а, и пятую борозду, созданную пятым плужным корпусом 30а. Ширина борозды определяется поперечным расстоянием d между плужными корпусами 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b, как показано на фиг. 1C.
Когда обратимое пашущее орудие 10 достигает конца первого прохода, основная рама 12 поворачивается на 180 градусов (обращается) относительно присоединительной стойки 14. Поворотный цилиндр (не показан), прикрепленный к присоединительной стойке 14, может быть использован для поворота (обращения) пашущего орудия 10. Во время поворота основной рамы, первое множество плужных корпусов, например, 22a, 24a, 26a, 28a, 30a, переводится наверх пашущего орудия 10. Одновременно, второе множество плужных корпусов, например, 22b, 24b, 26b, 28b, 30b, которое не использовалось в предыдущем проходе, переводится тогда на нижний конец пашущего орудия 10 и будет погружено в почву во время следующего прохода. Обратимый плуг будет находиться тогда в своей второй конфигурации (не показана).
Выполнение второго прохода поля пашущим орудием 10 в этой второй конфигурации обеспечивает первую борозду, созданную шестым плужным корпусом 22b, вторую борозду, созданную седьмым плужным корпусом 24b, третью борозду, созданную восьмым плужным корпусом 26b, четвертую борозду, созданную девятым плужным корпусом 28b, и пятую борозду, созданную десятым плужным корпусом 30b.
Обращение пашущего орудия 10 между последовательными проходами обеспечивает преимущество, состоящее в том, что плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b, которые зацепляют почву, всегда обращены к одному и тому же боковому краю основного поля 3, независимо от ориентации трактора.
В обеих конфигурациях пашущего орудия 10 основная рама 12 поддерживается колесом 20 орудия. Колесо 20 орудия расположено на заднем конце 18 пашущего орудия 10. Поскольку плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b, в общем, прикреплены к основной раме через балки 42, 44 46, 48 и 50, нет никакой возможности регулировать глубину обработки упомянутых взаимодействующих с землей инструментов без изменения просвета под основной рамой 12. Для этой цели, плуг 10, показанный на фиг. 1А - 1С, включает в себя колесо 20 орудия, которое действует в качестве опорного колеса для регулировки просвета под основной рамой 12. Рычажный механизм 62, обеспеченный между колесом 20 орудия и основной рамой 12, позволяет оператору поднимать или опускать основную раму 12 относительно поверхности 80 земли. Рычажный механизм 62 может быть соединен с исполнительным механизмом, например, гидравлическим цилиндром (не показан), для регулировки расстояния между колесом 20 орудия и основной рамой, в результате чего основная рама поднимается и опускается. Рычажный механизм 62 и исполнительный механизм вместе образуют устройство регулировки глубины для плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужников 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b. Поскольку положение множества первых и вторых взаимодействующих с землей инструментов является фиксированным относительно основной рамы 12, любое изменение просвета под основной рамой будет также влиять на глубину обработки множества первых и вторых взаимодействующих с землей инструментов. В частности, когда основная рама 12 опускается посредством уменьшения длины рычажного механизма 62 между колесом 20 орудия и основной рамой 12, глубина обработки множества первых взаимодействующих с землей инструментов, показанных на фиг. 1А - 1С, увеличивается, т.е. множество первых взаимодействующих с землей инструментов опускается дальше в/ по направлению к почве. Когда, с другой стороны, основная рама 12 поднимается посредством удлинения рычажного механизма 62 между колесом 20 орудия и основной рамой 12, глубина обработки множества первых взаимодействующих с землей инструментов уменьшается, т.е. множество первых взаимодействующих с землей инструментов либо поднимается, либо полностью вытягивается из почвы. Следует понимать, что удлинение и сокращение рычажного механизма 62 будет, главным образом, поднимать или опускать задний конец пашущего орудия 10. Для одинакового подъема переднего и заднего конца пашущего орудия 10, присоединительная стойка 14 может быть поднята или опущена вместе с регулировкой рычажного механизма 62 колеса 20 орудия. Подъем или опускание присоединительной стойки могут быть обеспечены посредством гидравлических цилиндров, соединенных с подъемными рычагами транспортного средства для сельскохозяйственных работ, которое несет присоединительную стойку 14.
Со ссылкой на фиг. 3, показан схематичный вид одного варианта осуществления системы 200 для регулировки глубины обработки пашущего орудия. Система 200 может включать в себя блок 202 управления, установленный на пашущее орудие 10 и/или, иначе, обеспеченный в связи с пашущим орудием 10. В некоторых вариантах осуществления система может дополнительно или альтернативно включать в себя блок 204 управления, который связан с транспортным средством 7 для сельскохозяйственных работ, таким как буксирующее транспортное средство (например, трактор). Либо блок 202 управления, связанный с пашущим орудием 10, и/либо блок 204 управления, связанный с транспортным средством 7 для сельскохозяйственных работ, могут быть выполнены с возможностью электронным образом управлять операцией одного или нескольких компонентов пашущего орудия, например, электронным образом управлять операцией одного или нескольких взаимодействующих с землей инструментов через соответствующие исполнительные механизмы 208. Подобным образом, либо блок 202 управления орудия, либо блок 204 управления транспортного средства 7 для сельскохозяйственных работ могут быть выполнены с возможностью управлять операцией одного или нескольких компонентов транспортного средства 7 для сельскохозяйственных работ.
Блок 202 управления, связанный с пашущим орудием 10, может включать в себя один или более процессоров 212, связанных с одним или несколькими запоминающими устройствами 214. Подобным образом, блок 204 управления, связанный с транспортным средством 7 для сельскохозяйственных работ, может также включать в себя один или более процессоров 216, связанных с одним или несколькими запоминающими устройствами 218. Блок 202 управления пашущего орудия 10 и блок 204 управления транспортного средства 7 для сельскохозяйственных работ могут связываться друг с другом, как указано стрелками 220, 222. Например, блок 202 управления орудия может передавать оперативные данные поля и/или данные орудия, детектированные датчиками 224 орудия, блоку 204 управления транспортного средства для сельскохозяйственных работ. Подобным образом, блок 204 управления транспортного средства 7 для сельскохозяйственных работ может связываться с блоком 202 управления орудия через линию 220 связи для передачи данных, определенных датчиками 226 транспортного средства, или передачи прямых команд оператора, вводимых через одно или более устройств 228 ввода. Блок 204 управления транспортного средства 7 для сельскохозяйственных работ может быть также связан с одним или несколькими клапанами 230, например, гидравлическими клапанами. Клапаны 230 могут быть частью гидравлической системы (не показана), расположенной на транспортном средстве 7 для сельскохозяйственных работ. Посредством управления клапанами 230, блок 204 управления может управлять подачей гидравлической текучей среды из гидравлической системы, либо прямо, либо непрямо, по направлению к исполнительным механизмам 208 пашущего орудия 10, через линии 232 текучей среды. Подобным образом, блок 202 управления сельскохозяйственного пашущего орудия 10 может быть связан с одним или несколькими клапанами 236, которые прикреплены к плужному орудию 10. Посредством управления клапанами 236, блок 202 управления может дополнительно управлять подачей гидравлической текучей среды к отдельным исполнительным механизмам 208 пашущего орудия 10. В этом случае, блок 204 управления транспортного средства для сельскохозяйственных работ может быть все же прямо связан с клапанами, или он может быть связан с клапанами через блок 202 управления пашущего орудия 10. Снова следует понимать, что, в общем, только единственный блок 202 или 204 управления может требоваться для управления как пашущим орудием 10, так и транспортным средством 7 для сельскохозяйственных работ вместе с их соответствующими аппаратными средствами. Блок управления может быть также расположен удаленно как от транспортного средства 7 для сельскохозяйственных работ, так и от пашущего орудия 10.
Один или более исполнительных механизмов 208 могут быть частью одного или нескольких устройств регулировки глубины, выполненных с возможностью регулирования глубины обработки одного или нескольких взаимодействующих с землей инструментов пашущего орудия 10. В одном примере, один или более исполнительных механизмов 208 могут соответствовать гидравлическим исполнительным механизмам, связанным с рычажным механизмом 62, и исполнительным механизмам, связанным с подъемными рычагами (не показаны) транспортного средства для сельскохозяйственных работ для подъема или опускания присоединительной стойки 14, описанной в связи с фиг. 1В. Соответственно, исполнительные механизмы 208 могут быть использованы для изменения просвета под основной рамой пашущего орудия 10 в зависимости от входных данных любого из блоков 202, 204 управления. Блок (блоки) 202, 204 управления может быть использован для автоматической синхронизации регулировки рычажного механизма 62 и уровня присоединительной стойки таким образом, чтобы передний и задний концы пашущего орудия 10 поднимались и/или опускались одновременно. Альтернативно, и как описано в связи с фиг. 7, отдельные исполнительные механизмы и устройство регулировки глубины могут быть обеспечены для каждого из взаимодействующих с землей инструментов.
Блок 202 управления орудия и/или блок 204 управления транспортного средства 7 для сельскохозяйственных работ выполнены с возможностью автоматического управления операцией устройства регулировки глубины для регулировки глубины обработки по меньшей мере одного из взаимодействующих с землей инструментов. В этом описании изобретения, термин «автоматическое управление» относится к способности блоков 202 и/или 204 управления регулировать глубину обработки по меньшей мере одного взаимодействующего с землей инструмента независимо от входных данных оператора. Напротив, блоки 202, 204 управления выполнены с возможностью принимать управляющие данные, указывающие на по меньшей мере одно из операции пашущего орудия 10 или состояния поля, через которое перемещается пашущее орудие 10. Управляющие данные, принимаемые блоком 202 управления пашущего орудия 10 и/или блоком 204 управления транспортного средства 7 для сельскохозяйственных работ, могут быть обеспечены различными источниками.
В одном варианте осуществления один или более датчиков 224 пашущего орудия 10 и/или один или более датчиков 226 транспортного средства 7 для сельскохозяйственных работ могут быть использованы для определения оперативных данных орудия, связанных с операцией пашущего орудия 10 и/или оперативных данных поля, связанных с состоянием поля, через которое перемещается пашущее орудие 10. Для этой цели, датчики 224, 226 могут включать в себя множество датчиков разных типов для определения различных данных, связанных с состоянием поля и/или состоянием орудия.
В одном примере, показанном на фиг. 2, датчики 226 транспортного средства 7 для сельскохозяйственных работ включают в себя оптические датчики 74 и 76. Первый оптический датчик 74 может быть соединен с передним концом транспортного средства 7 для работ. Первый датчик 74 может быть использован для определения состояний поля впереди транспортного средства 7 для сельскохозяйственных работ. Например, первый датчик 74 может быть выполнен с возможностью определять контуры поля перед транспортным средством для сельскохозяйственных работ и, таким образом, также перед пашущим орудием 10. Первый датчик 74 может быть также выполнен с возможностью определять данные поля, которые указывают на границу между областью 3 обработки и краями 5, 6 поля. Первый оптический датчик 74 может обеспечивать такие данные поля, относящиеся к состоянию поля перед транспортным средством 7 для сельскохозяйственных работ, для одного или обоих из блоков 202, 204 управления.
Второй оптический датчик 76 может быть расположен на боковой поверхности транспортного средства 7 для сельскохозяйственных работ или, альтернативно, на боковой поверхности пашущего орудия 10. Второй оптический датчик 76 может быть использован для определения данных поля, указывающих на состояния поля на следующем ряду обработки. Такие данные поля могут указывать на контуры поля на следующем ряду обработки или на препятствия вдоль следующего ряда обработки (например, камни), которые должны быть обойдены взаимодействующими с землей инструментами пашущего орудия 10.
Конечно, оптические датчики могут быть также расположены на плужном орудии. Одним примером оптического датчика, расположенного на плужном орудии 10, является третий датчик 78. В примере фиг. 2, третий датчик 78 является датчиком изображения, осуществляющим обзор борозд, создаваемых пашущим орудием 10, для оценивания качества. В примере, показанном на фиг. 2, третий датчик 78 выполнен с возможностью осуществлять обзор борозд прямо за пашущим орудием 10. Однако также может быть обеспечен альтернативный или дополнительный оптический датчик, который определяет качество борозд в предыдущем ряду обработки, например, смежном с рядом обработки, который плуг обрабатывает в данный момент. Данные поля, которые определяются третьим датчиком 78, могут включать в себя глубину борозды и ширину борозды, создаваемой плужными корпусами пашущего орудия 10. Другие данные поля, определяемые третьим датчиком 78 и обеспечиваемые для одного или обоих из блоков 202, 204 управления, могут указывать на количество растительных остатков, которые не были закрыты операцией вспашки, или на однородность борозд, создаваемых пашущим орудием 10. Другими словами, третий датчик 78 может быть оптическим датчиком, выполненным с возможностью распознавать сорняки или другие растительные остатки, оставшиеся на вспаханной почве, например, посредством их цвета.
Конечно, датчики 74, 76 и 78 являются только некоторыми примерами датчиков, которые могут быть использованы для определения оперативных данных поля, которые передаются в качестве обратной связи одному или обоим из блоков 202, 204 управления. Другие датчики могут включать в себя:
гигрометры для определения параметра влажности, указывающего на влажность почвы;
датчики сопротивления для определения параметров, указывающих на уровни уплотнения почвы;
датчики температуры для определения температуры почвы;
датчики уровня для определения параметров, указывающих на контуры поля. Такие контуры поля могут быть определены в качестве данных о контурах земли. Неисчерпывающий перечень оперативных данных о контурах земли включает в себя:
продольный наклон пашущего орудия, который может быть определен посредством датчиков уровня на основной раме пашущего орудия;
поперечный наклон пашущего орудия, который может быть определен посредством датчиков уровня на основной раме пашущего орудия;
Большинство вышеупомянутых датчиков может быть прикреплено либо к транспортному средству 7 для сельскохозяйственных работ, либо к плужному орудию 10, либо даже к части отдельного устройства, такого как другое транспортное средство для сельскохозяйственных работ или радиоуправляемый летательный аппарат, сканирующий область обработки перед транспортным средством 7 для сельскохозяйственных работ и пашущим орудием 10 или за ними.
Дополнительные примеры включают в себя датчики, которые определяют параметры, указывающие на операцию пашущего орудия, такие как:
датчик местоположения для непрерывного или периодического определения положения пашущего орудия 10 на поле, параметра, который может быть использован для определения скорости пашущего орудия 10 и/или соответствующего транспортного средства 7 для сельскохозяйственных работ;
датчик скорости, прямо определяющий скорость пашущего орудия 10 и/или соответствующего транспортного средства 7 для сельскохозяйственных работ;
датчик силы для определения торможения/сопротивления, испытываемого пашущим орудием 10 или по меньшей мере одним взаимодействующим с землей инструментом;
датчик проскальзывания колеса для определения параметра, указывающего на проскальзывание колеса, испытываемое колесом 20 пашущего орудия 10 и/или колесом соответствующего транспортного средства 7 для сельскохозяйственных работ;
датчик расстояния для определения положения по меньшей мере одного из взаимодействующих с землей инструментов (т.е. плужных корпусов 22a, 24a, 26a, 28a, 30a и/или предплужников 32a, 34a, 36a, 38a, и 40a) относительно поверхности земли поля. Датчик (датчики) расстояния может быть, например, прикреплен к балке (балкам), поддерживающей плужные корпуса и выполнен с возможностью измерять расстояние между частью балки и поверхностью земли. На основе упомянутого расстояния может быть определена глубина обработки одного или нескольких плужных корпусов. Подобным образом, датчики расстояния могут быть расположены на опорном рельсе предплужников.
Каждый из датчиков, описанных выше, может быть прямо или непрямо связан с одним или обоими из блоков 202 и 204 управления, связанных с пашущим орудием 10 и/или транспортным средством 7 для работ. Датчики снабжают блоки 202, 204 управления управляющими данными, включающими в себя оперативные данные поля и данные орудия, описанные выше.
На основе управляющих данных, обеспечиваемых датчиками, блоки 202, 204 управления могут находить или вычислять требуемую глубину обработки. Для этой цели, соответствующие запоминающие устройства 214, 218 блоков 202, 204 управления могут включать в себя таблицу поиска с массивом глубин обработки, связанных с разными данными, которые могут быть приняты от датчиков 224, 226, описанных выше. Альтернативно, запоминающие устройства 214, 218 могут включать в себя заданный алгоритм для вычисления требуемой глубины обработки на основе данных от датчиков. Такие заданные алгоритмы могут быть затем применены к параметрам данных от датчиков соответствующими процессорами 212, 216. Неограничивающие примеры данных, принимаемых датчиками, и соответствующего изменения требуемой глубины обработки изложены ниже:
увеличивают глубину обработки, когда данные от датчиков указывают на высокую влажность почвы, и/или уменьшают глубину обработки, когда параметры датчиков указывают на низкую влажность почвы;
увеличивают глубину обработки, когда данные от датчиков указывают на высокие уровни уплотнения почвы, и/или уменьшают глубину обработки, когда параметры датчиков указывают на низкие уровни уплотнения почвы;
увеличивают или уменьшают глубину обработки, когда данные от датчиков указывают на то, что температура почвы отличается от требуемой температуры почвы более чем на порог температуры почвы;
увеличивают глубину обработки, когда данные от датчиков указывают на то, что предстоящий контур поля включает в себя углубления или отверстия перед рассматриваемым взаимодействующим с землей инструментом, и/или уменьшают глубину обработки, когда данные от датчиков указывают на то, что контур поля включает в себя выпуклости или гребни перед рассматриваемым взаимодействующим с землей инструментом. Примерами датчика, который может быть пригодным для идентификации углублений и гребней, могут быть радиолокаторы земли, оптические датчики, датчики уровня, и/или датчики, связанные с подвеской транспортного средства для сельскохозяйственных работ;
увеличивают глубину обработки, когда данные от датчиков указывают на то, что скорость пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ является большей, чем порог скорости, и/или уменьшают глубину обработки, когда данные от датчиков указывают на то, что скорость пашущего орудия или соответствующего транспортного средства для сельскохозяйственных работ является меньшей, чем заданный порог скорости. Таким образом, меньшие глубины обработки могут быть использованы при низких скоростях, например, когда процесс вспашки начинает уменьшать торможение и, таким образом, нагрузку на двигатель транспортного средства для работ. Подобным образом, при достижении транспортным средством для работ и пашущим орудием некоторой скорости, глубина обработки может быть увеличена без значительного влияния на торможение и соответствующую нагрузку на двигатель транспортного средства для работ;
уменьшают глубину обработки, когда данные от датчиков указывают на то, что сопротивление вспашке, испытываемое пашущим орудием или по меньшей мере одним взаимодействующим с землей инструментом, является большим, чем порог сопротивления, и/или увеличивают глубину обработки, когда данные от датчиков указывают на то, что сопротивление вспашке, испытываемое пашущим орудием или по меньшей мере одним взаимодействующим с землей инструментом, является меньшим, чем второй порог сопротивления;
уменьшают глубину обработки, когда данные от датчиков указывают на то, что проскальзывание колеса, испытываемое колесом пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ, превышает порог проскальзывания колеса, и/или увеличивают глубину обработки, когда проскальзывание колеса, испытываемое колесом пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ, является меньшим, чем порог проскальзывания колеса;
увеличивают глубину обработки, когда данные от датчиков указывают на то, что глубина борозды, создаваемой соответствующим плужным корпусом, является слишком малой, и/или уменьшают глубину обработки, когда данные от датчиков указывают на то, что глубина борозды соответствующего плужного корпуса является слишком большой;
постепенно уменьшают глубину обработки, когда данные от датчиков указывают на то, что край поля встретится в пределах заданного расстояния, и/или постепенно увеличивают глубину обработки, когда данные от датчиков указывают на то, что пашущее орудие приближается к границе между краем поля и областью обработки.
Следует понимать, что изменение глубины обработки может быть основано на одних или нескольких данных от датчиков, описанных выше. Некоторые из данных от датчиков могут иметь приоритет, например, любая предстоящая граница между областью обработки и краями поля, причем в этом случае блок 202, 204 управления будет форсировать соответствующее увеличение или уменьшение глубины обработки для создания прямой граничной полосы, независимо от других данных, таких как влажность почвы или уровни уплотнения поля.
Транспортное средство 7 для работ системы 200, показанной на фиг. 3, может также включать в себя дисплей 234 для обеспечения обратной связи для оператора. Дисплей 234 может быть использован для показа текущей глубины обработки каждого из взаимодействующих с землей инструментов пашущего орудия 10. Согласно другим вариантам осуществления блоки 202, 204 управления могут также отображать заданные изменения глубины обработки во время операции вспашки на дисплее 234. Оператор может иметь возможность переопределять любое заданное изменение глубины обработки через устройства 228 ввода. Однако следует понимать, что входные данные оператора, в общем, не требуются системе 200 для изменения глубины обработки одного или нескольких взаимодействующих с землей инструментов пашущего орудия 10.
В другом варианте осуществления управляющие данные, принимаемые блоками 202, 204 управления, не основываются на оперативных данных относительно состояния поля и/или операции орудия. Напротив, управляющие данные, принимаемые блоками 202, 204 управления, могут быть основаны на заданных априорных данных поля, хранимых в базе данных запоминающего устройства 214, 218. В этом варианте осуществления единственными требуемыми оперативными данными являются данные о местоположении, принимаемые либо датчиками 224 пашущего орудия 10, либо датчиками 226 транспортного средства 7 для работ. Датчики, обеспечивающие данные о местоположении, могут быть GPS-датчиками для отслеживания оперативного местоположения транспортного средства 7 для сельскохозяйственных работ и/или пашущего орудия 10 на поле. В этом варианте осуществления база данных может включать в себя информацию о поле и требуемую глубину обработки в конкретных местоположениях на поле. Например, база данных может включать в себя априорные данные поля, связанные с ранее идентифицированными состояниями поля. Ранее идентифицированными состояниями поля могут быть влажность почвы, уровни уплотнения почвы, контуры поля, и т.д., определенные перед операцией вспашки, подлежащей управлению. Например, данные, собранные во время предыдущей вспашки поля, могут быть повторно использованы для определения требуемой глубины обработки в разных частях поля. Альтернативно, априорные данные поля могут быть данными, собираемыми независимыми устройствами сбора данных, такими как другие транспортные средства/ орудия для сельскохозяйственных работ или радиоуправляемые летательные аппараты, используемые, конкретно, для измерения данных поля перед операций вспашки. Кроме того, априорные данные поля могут быть основаны на спутниковых снимках поля, полученных перед операций вспашки. Например, спутниковые снимки могут быть полезными для определения данных поля, указывающих на контуры поля и/или влажность почвы.
В некоторых вариантах осуществления априорные данные поля включают в себя данные о контурах земли. Данные о контурах земли могут соответствовать наклону поверхности земли поля в направлении перемещения пашущего орудия и/или наклону поверхности земли поля поперечно направлению перемещения пашущего орудия. Блок управления может быть выполнен с возможностью определять или принимать предпочтительную траекторию плуга и использовать данные о контурах земли для определения продольного и/или поперечного наклонов поля вдоль упомянутой траектории.
Когда пашущее орудие перемещается через поле, блоки 202, 204 управления определяют местоположение пашущего орудия на поле, например, посредством GPS-датчиков. Блоки 202, 204 управления могут затем использовать эти данные о местоположении для сопоставления текущего местоположения пашущего орудия 10 с элементом данных в запоминающем устройстве 214, 218, который связан с конкретными априорными данными поля, связанными с этим конкретным местоположением на поле. Эти идентифицированные таким образом релевантные априорные данные поля могут быть затем использованы процессорами 212, 216 блоков 202, 204 управления для вычисления требуемой глубины обработки для взаимодействующего с землей инструмента. Альтернативно, может быть обеспечена другая база данных, которая позволяет блоку 202, 204 управления искать требуемую глубину обработки, соответствующую релевантным априорным данным поля, определенным для текущего местоположения пашущего орудия 10.
Со ссылкой на фиг. 4, показана блок-схема последовательности операций способа 300 регулировки глубины обработки пашущего орудия согласно одному варианту осуществления настоящего изобретения. В этом варианте осуществления блок управления будет принимать управляющие данные от датчика, который либо соединен, либо связан с пашущим орудием 10 и/или транспортным средством 7 для сельскохозяйственных работ.
Более подробно, на первом этапе S302 блок управления принимает управляющие данные, указывающие на операцию пашущего орудия и/или состояния поля, через которое перемещается пашущее орудие. В способе 300, показанном на фиг. 4, управляющие данные принимаются от датчика, который определяет одни или более оперативных данных, связанных либо с состоянием поля (данные поля), и/либо с операцией пашущего орудия 10 (данные орудия). В одном варианте осуществления, описанном выше в отношении фиг. 2, оптический датчик 74 может быть обеспечен для определения параметров, указывающих на контуры поля перед транспортным средством 7 для сельскохозяйственных работ. Этот параметр контуров поля передается в качестве обратной связи датчиком блоку управления, который связан либо с транспортным средством 7 для сельскохозяйственных работ, либо с пашущим орудием 10. Блок управления может использовать данные от датчика для идентификации углублений и гребней на поле.
На основе информации, принимаемой блоком управления на этапе S302, блок управления может, но не обязательно, искать и/или вычислять требуемую глубину обработки на этапе S304.
На другом необязательном этапе S306, блок управления может определять текущую глубину обработки. Как описано выше, либо это может быть выполнено дополнительным датчиками, такими как датчики, определяющие положение гидравлических исполнительных механизмов устройства регулировки глубины, либо текущая глубина обработки может быть найдена в базе данных в запоминающем устройстве блока управления.
На дополнительном необязательном этапе S308, блок управления может сравнивать требуемую глубину обработки с определенной текущей глубиной обработки. На необязательном этапе S310, блок управления сравнивает разницу между требуемой глубиной обработки и текущей глубиной обработки с заданным пороговым значением. Пороговое значение может быть установлено изготовителем или оператором до или во время операции вспашки. Если на этапе S310 будет определено, что разница между требуемой глубиной обработки и текущей глубиной обработки является большей, чем пороговое значение, то тогда способ 300 может перейти к этапу S312. Иначе, если разница между требуемой глубиной обработки и текущей глубиной обработки будет меньшей, чем пороговое значение, то способ 300 перезапустится с этапа S302, описанного выше.
На этапе S312, глубину обработки по меньшей мере одного взаимодействующего с землей инструмента регулируют посредством устройства регулировки глубины, управляемого блоком управления. Следует отметить, что этапы S304 - S310 являются необязательными этапами, которые улучшат точность регулировки глубины обработки. Однако можно также удалить этапы S304 - S310 и выполнять регулировку глубины на каждом этапе S312 прямо в ответ на управляющие данные, принимаемые на этапе S302. Например, если данные от датчиков указывают на контуры поля, и блок управления затем определяет наличие углубления на поле, то блок управления может прямо увеличить глубину обработки на этапе S312 без учета точной требуемой глубины обработки или текущей глубины обработки. В другом варианте осуществления если данные от датчиков указывают на контуры поля, и блок управления затем определяет наличие углубления на поле, то блок управления может определить требуемое увеличение глубины обработки и игнорировать текущую глубину обработки.
Дополнительный необязательный этап S314 для обновления базы данных новой глубиной обработки может следовать за этапом S312. На этапе S314, блок управления может определять глубину обработки по меньшей мере одного взаимодействующего с землей инструмента после регулировки на этапе S312 и запоминать это значение в базе данных запоминающего устройства блока управления в качестве новой «текущей глубины обработки». Таким образом, элементы базы данных текущей глубины обработки непрерывно обновляются, когда глубина обработки регулируется устройством регулировки глубины.
После обновления базы данных новой глубиной обработки, способ 300 может быть перезапущен с этапа S302 для приема управляющих данных, указывающих на состояние поля и/или операцию пашущего орудия.
Со ссылкой на фиг. 5, показан альтернативный вариант осуществления способа регулировки глубины обработки пашущего орудия согласно настоящему раскрытию. Способ 400 отличается от способа 300, главным образом, тем, что блок управления не принимает управляющие данные, указывающие на оперативные состояния поля, через которое перемещается пашущее орудие. Напротив, решения в отношении глубины обработки по меньшей мере одного взаимодействующего с землей инструмента принимаются на основе существующих данных поля, хранимых в базе данных, доступной для блока управления.
Более подробно, способ 400 начинается с этапа S402, на котором определяют местоположение пашущего орудия и/или соответствующего транспортного средства 7 для работ. Определение местоположения может быть обеспечено либо датчиком местоположения, таким как GPS-датчик, либо оператором, например, посредством установки метки на карте на дисплее транспортного средства 7 для сельскохозяйственных работ.
После определения местоположения пашущего орудия 10 на этапе S402, блок управления будет принимать управляющие данные, указывающие на предыдущие состояния поля, на этапе S404. Другими словами, блок управления будет получать доступ к базе данных, включающей в себя априорные данные поля, связанные с состояниями поля, которые были определены до операции вспашки. В одном примере, эти априорные данные поля могут относиться к состояниям поля, определенным во время предыдущих проходов по тому же самому полю. Альтернативно, априорные данные поля могут быть собраны со спутниковых снимков, описанных выше. Например, априорные данные поля, принимаемые в качестве управляющих данных блоком управления, могут указывать на влажность почвы в любой точке поля. Блок управления может находить только влажность почвы в текущем местоположении пашущего орудия, т.е. релевантные априорные данные поля, которые связаны с местоположением пашущего орудия.
На основе априорных данных поля, принимаемых блоком управления на этапе S404, далее может следовать необязательный этап S406, на котором требуемая глубина обработки ищется и/или вычисляется блоком управления на основе принимаемых релевантных априорных данных поля. Необязательные этапы S408 - S412 могут следовать далее для определения текущей глубины обработки и сравнения требуемой и текущей глубины обработки с заданным пороговым значением. Этапы S408 - S412 по существу идентичны этапам S306 - S310, описанным со ссылкой на способ 300 на фиг. 4.
На дополнительном этапе S414, блок управления приводит в действие устройство регулировки глубины для регулировки глубины обработки по меньшей мере одного взаимодействующего с землей инструмента на основе принимаемых входных априорных данных поля. Этап S414 по существу идентичен этапу S312 фиг. 4.
На последнем, необязательном этапе S416, база данных может быть обновлена текущей глубиной обработки в качестве новой текущей глубины обработки в базе данных. Этап S416 по существу идентичен этапу S314 фиг. 4. После обновления базы данных на этапе S416, способ может вернуться к этапу S402.
Со ссылкой на фиг. 6, показан другой альтернативный вариант осуществления способа регулировки глубины обработки пашущего орудия согласно настоящему раскрытию. Способ 500 следует понимать как вариант способа 300, в котором более одного вида управляющих данных учитывается при регулировке глубины обработки взаимодействующих с землей инструментов.
Более подробно, на первом этапе S502 блок управления принимает управляющие данные, указывающие на по меньшей мере два состояния поля, через которое перемещается пашущее орудие. Такие управляющие данные могут быть приняты в качестве оперативных или априорных данных поля, описанных выше. В одном примере, управляющие данные содержат данные о контурах земли, которые указывают на контуры земли поля, через которое перемещается пашущее орудие, и данные о почве, которые соответствуют по меньшей мере одной характеристике почвы поля.
Данные о контурах земли могут соответствовать наклону поверхности земли поля в направлении перемещения пашущего орудия и/или наклону поверхности земли поля поперечно направлению перемещения пашущего орудия. Данные о почве могут соответствовать по меньшей мере одной характеристике почвы ниже поверхности земли поля, такой как влажность почвы в текущем местоположении пашущего орудия.
На основе информации, принимаемой блоком управления на этапе S502, блок управления может, но не необязательно, искать и/или вычислять требуемую глубину обработки на этапе S504. В одном примере, требуемая глубина обработки может быть определена на основе данных о почве. Например, требуемая глубина обработки может уменьшаться при увеличении плотности почвы. Подобным образом, требуемая глубина обработки может быть большей в почвах с большей влажностью. Блок управления может сравнивать параметры данных о почве с эталонными характеристиками почвы и регулировать заданную, принимаемую по умолчанию глубину обработки на основе разницы между эталонными характеристиками почвы и параметрами данных о почве.
На другом необязательном этапе S506, блок управления может определять текущую глубину обработки. Как описано выше, либо это может быть выполнено дополнительными датчиками, такими как датчики, определяющие положение гидравлических исполнительных механизмов устройства регулировки глубины, либо текущая глубина обработки может быть найдена в базе данных в запоминающем устройстве блока управления. На текущую глубину обработки могут также влиять контуры поля. В частности, углубления и гребни на траектории пашущего орудия могут вызывать временные изменения текущей глубины обработки одного или нескольких взаимодействующих с землей инструментов. Например, если пашущее орудие проходит через небольшое углубление, то некоторые части основной рамы пашущего орудия могут быть дистанцированы дальше от поверхности земли, чем другие. Это может вызывать уменьшение глубины обработки некоторых взаимодействующих с землей инструментов, или, в некоторых случаях, некоторые из взаимодействующих с землей инструментов могут быть совсем удалены из почвы. Для предотвращения таких самопроизвольных изменений глубины обработки одного или нескольких взаимодействующих с землей инструментов, блок управления может быть выполнен с возможностью определять текущую глубину обработки на основе данных о контурах земли. В одном примере, блок управления может принимать данные о контурах земли в форме продольного или поперечного наклонов поля вдоль траектории плуга. Эти данные о контурах земли могут быть обеспечены для блока управления в качестве априорных данных поля, описанных выше. На основе таких данных о контурах земли блок управления может предсказывать самопроизвольные изменения текущей глубины обработки одного или нескольких взаимодействующих с землей инструментов и предпринимать восстановительные действия при необходимости (ср. ниже).
На дополнительном необязательном этапе S508, блок управления может сравнивать требуемую глубину обработки с определенной текущей глубиной обработки. На необязательном этапе S510, блок управления может сравнивать разницу между требуемой глубиной обработки и текущей глубиной обработки с заданным пороговым значением. Пороговое значение может быть установлено изготовителем или оператором до или во время операции вспашки. Если на этапе S510 будет определено, что разница между требуемой глубиной обработки и текущей глубиной обработки является большей, чем пороговое значение, то тогда способ 500 может перейти к этапу S512. Иначе, если разница между требуемой глубиной обработки и текущей глубиной обработки будет меньшей, чем пороговое значение, то способ 500 может быть перезапущен с этапа S502, описанного выше.
На этапе S512, глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулируется посредством устройства регулировки глубины, управляемого блоком управления. Следует отметить, что этапы S504 - S510 являются необязательными этапами, которые улучшат точность регулировки глубины обработки. Однако можно также удалить этапы S504 - S510 и выполнять регулировку глубины на каждом этапе S512 прямо в ответ на управляющие данные, принимаемые на этапе S502.
Дополнительный необязательный этап S514 для обновления базы данных новой глубиной обработки может следовать за этапом S512. На этапе S514, блок управления может определять глубину обработки по меньшей мере одного взаимодействующего с землей инструмента после регулировки на этапе S512 и запоминать это значение в базе данных запоминающего устройства блока управления в качестве новой «текущей глубины обработки». Таким образом, элементы базы данных текущей глубины обработки непрерывно обновляются, когда глубина обработки регулируется устройством регулировки глубины.
После обновления базы данных новой глубиной обработки, способ 500 может быть перезапущен с этапа S502.
Следует понимать, что в способах, показанных на фиг. 4, 5, и 6, этапы могут выполняться для одного или нескольких взаимодействующих с землей инструментов, которые могут регулироваться либо вместе, либо отдельно. Кроме того, способы 300, 400, и 500 могут быть использованы для регулировки глубины обработки различных других взаимодействующих с землей инструментов, таких как плужные корпуса и/или предплужники, которые могут быть либо жестко, либо подвижно соединены с основной рамой пашущего орудия 10. В одном варианте осуществления регулировка глубины обработки взаимодействующих с землей инструментов одного вида, таких как плужные корпуса, будет инициировать соответствующую регулировку взаимодействующих с землей инструментов другого вида, таких как предплужники. Например, когда глубина обработки плужных корпусов увеличивается посредством способа, описанного выше, глубина обработки предплужников может одновременно уменьшаться для сохранения постоянной глубины проникновения предплужников, например, равной пяти сантиметрам ниже поверхности земли.
Со ссылкой на фиг. 7, показан альтернативный путь изменения глубины обработки взаимодействующих с землей инструментов с использованием альтернативного устройства регулировки глубины. Фиг. 7 схематичным изображением соединения между основной рамой 112 и первым взаимодействующим с землей инструментом 122а, например, плужным корпусом. Следует понимать, что пашущее орудие настоящего изобретения может иметь множество первых взаимодействующих с землей инструментов и множество вторых взаимодействующих с землей инструментов, подобных плужному орудию 10, показанному на фиг. 1А - 1С. Фиг. 7 показывает только соединение между основной рамой 112 и одним из множества первых взаимодействующих с землей инструментов. Первый взаимодействующий с землей инструмент 122а является плужным корпусом, но может быть также любым другим пригодным взаимодействующим с землей инструментом, таким как предплужник. Плуг содержит плужный отвал 124 и лемех 126. Первый взаимодействующий с землей инструмент 122а соединен с основной рамой 112 через четырехзвенный рычажный механизм 114. Четырехзвенный рычажный механизм 114 является параллелограммным рычажным механизмом. Четырехзвенный рычажный механизм 114 включает в себя основание, которое представлено основной рамой 112, первое поворотное звено 116, второе поворотное звено 118, и сцепное звено 120. Первое поворотное звено 116 поворотно соединено с основной рамой 112 у первого конца 130 и поворотно соединено со сцепным звеном 120 у противоположного, второго конца 132. Второе поворотное звено соединено с основной рамой у первого конца 134 и соединено со сцепным звеном 120 у противоположного, второго конца 136.
Первое поворотное звено 116 соединено с основной рамой 112 у своего первого конца 130 через ось 138 поворота. У своего противоположного, второго конца 132, первое поворотное звено 116 соединено со сцепным звеном 120 через ось 140 поворота. Второе поворотное звено 118 соединено с основной рамой у его первого конца 134 через ось 142 поворота. У своего противоположного, второго конца 136, второе поворотное звено 118 соединено со сцепным звеном 120 через ось 144 поворота.
Поворотные балки 116 и 118 идентичны по длине, т.е. расстояние между осями 138 и 140 поворота первого поворотного звена 116 идентично расстоянию между осями 142 и 140 поворота второго поворотного звена 118.
Расстояние между первой осью 138 поворота первого поворотного звена 116 и первой осью 142 поворота второго поворотного звена 118 идентично расстоянию между второй осью 140 поворота первого поворотного звена 116 и второй осью 144 поворота второго поворотного звена 118. Первая и вторая поворотные балки 116, 118 расположены параллельно друг другу. Сцепное звено 120 и основание (представленное частью основной рамы 112 между осями 138 и 142 поворота) расположены параллельно.
Первый взаимодействующий с землей инструмент 122а (плужный корпус) соединен со сцепным звеном 120. В этом примере, первый взаимодействующий с землей инструмент 122а может быть съемно соединен со сцепным звеном 120 через крепежные элементы 146. Конечно, возможен также любой другой способ крепления для соединения первого взаимодействующего с землей инструмента 122а со сцепным звеном 120.
Следует понимать, что всегда, когда четырехзвенный рычажный механизм 114 перемещается, первая и вторая поворотные балки 116, 118 остаются параллельными. Подобным образом, сцепное звено 120 будет всегда оставаться параллельным балке основания, т.е. основной раме 112, во время перемещения. Диапазон перемещения схематично показан на фиг. 7 стрелкой А. Стрелка А показывает возможную траекторию второй оси 144 поворота во время перемещения четырехзвенного рычажного механизма 114. Конечно, вторая ось 140 поворота первого поворотного звена 116 имеет соответствующий диапазон перемещения. Ось 144 поворота может перемещаться между первым концевым положением, указанным линией L1, и вторым концевым положением, указанным линией L2. Когда ось 144 поворота перемещается между своим первым конечным положением и вторым конечным положением вдоль стрелки А, то же самое делает ось 140 поворота первого поворотного звена 116. Следовательно, сцепное звено 120 будет подвергаться тому же самому перемещению. Отсюда следует, что в первом конечном положении второго поворотного звена 118, указанном линией L1, сцепное звено 120 находится в своей самой нижней точке, т.е. на максимальном расстоянии от основной рамы 112. Во втором конечном положении второго поворотного звена 118, сцепное звено 120 находится у его верхнего конца, т.е. ближе всего к основной раме 112. Соответственно, глубина обработки взаимодействующего с землей инструмента 122а, который соединен со сцепным звеном 120, изменяется, когда первая и вторая поворотные балки 116, 118 поворачиваются относительно их соответствующих первых осей 138, 142 поворота. Соответственно, первый взаимодействующий с землей инструмент 122а также перемещается между первым положением, в котором устанавливается максимальная глубина обработки, т.е. когда второе поворотное звено 118 выровнено с линией L1, и вторым положением, в котором устанавливается минимальная глубина обработки, т.е. когда второе поворотное звено 118 выровнено с линией L2.
Отсюда следует, что глубина обработки первого взаимодействующего с землей инструмента 122а, показанного в варианте осуществления фиг. 7, является отдельно регулируемой независимо от просвета под основной рамой 112. Соответственно, расстояние между колесом орудия и основной рамой может быть фиксированным таким образом, чтобы просвет под основной рамой 112 оставался неизменным.
Конечно, другие взаимодействующие с землей инструменты могут быть соединены с основной рамой подобно первому взаимодействующему с землей инструменту 122а.
Исполнительный механизм 110 обеспечен для перемещения четырехзвенного рычажного механизма между первым и вторым конечными положениями. Исполнительный механизм 110 и четырехзвенный рычажный механизм четырехзвенный рычажный механизм 114 являются частью средства регулировки глубины, которое регулирует глубину обработки первого взаимодействующего с землей инструмента 122а посредством перемещения первого взаимодействующего с землей инструмента 122а относительно основной рамы 112. Исполнительный механизм 110 согласно варианту осуществления фиг. 7 является гидравлическим цилиндром. Камеры гидравлического цилиндра могут быть соединены с существующей гидравлической системой соответствующего буксирующего транспортного средства (не показано), которая будет подавать гидравлическую текучую среду под давлением для приведения в движение четырехзвенного рычажного механизма 114. Первый конец 150 исполнительного механизма 110 соединен с основной рамой 112. Второй конец 152 исполнительного механизма 110 соединен со сцепным звеном 120 четырехзвенного рычажного механизма 114. Соответственно, в варианте осуществления фиг. 7, второе поворотное звено 118 будет перемещаться по направлению к своему первому конечному положению, указанному линией L1, когда гидравлический цилиндр будет сокращаться. Подобным образом, второе поворотное звено 118 будет перемещаться в противоположном направлении, по направлению к своему второму конечному положению, указанному линией L2, когда гидравлический цилиндр будет удлиняться. Механические концевые стопоры могут быть обеспечены для ограничения перемещения четырехзвенного рычажного механизма 114 и потенциального блокирования четырехзвенного рычажного механизма 114 в его первом и/или втором конечном положении.
Ввиду вышеупомянутого, удлинение исполнительного механизма 110 на фиг. 7 будет вызывать подъем взаимодействующего с землей инструмента 122а, т.е. уменьшение глубины обработки. Подобным образом, сокращение исполнительного механизма 110 будет вызывать вдавливание первого взаимодействующего с землей инструмента 122а в почву, в результате чего увеличится глубина обработки.
По сравнению с вариантом осуществления показанным на фиг. 1А - 1С, в котором все взаимодействующие с землей инструменты регулируются одновременно посредством изменения просвета под основной рамой 12 через колесо 20 орудия и присоединительную стойку 14, фиг. 7 показывает вариант осуществления, в котором каждый из взаимодействующих с землей инструментов может регулироваться независимо. Следует понимать, что подобное расположение может быть обеспечено для регулировки глубины предплужников пашущего орудия. Отсюда следует, что взаимодействующие с землей инструменты, независимо от того, являются ли они плужными корпусами или предплужниками, могут быть в некоторых вариантах осуществления отдельно регулируемыми устройством регулировки глубины, таким как устройство регулировки глубины, показанное на фиг. 7.
С использованием отдельного устройства регулировки глубины фиг. 7, способ настоящего изобретения может быть использован для отдельной регулировки глубины некоторых или каждого из взаимодействующих с землей инструментов пашущего орудия на основе принимаемых управляющих данных. Этот вариант осуществления позволяет обеспечить более точную регулировку пашущего орудия 10. В одном примере, способ настоящего изобретения может включать этап, на котором изменяют глубину обработки некоторых, но не всех взаимодействующих с землей инструментов, например, некоторых, но не всех плужных корпусов, в данный момент при эксплуатации. Например, способ может включать в себя этап, на котором изменяют глубину обработки взаимодействующих с землей инструментов, которые могут столкнуться с препятствием. Альтернативно или дополнительно, способ может включать этап, на котором изменяют глубину обработки взаимодействующих с землей инструментов, которые находятся в контакте с более твердыми или более мягкими почвами, чем другие взаимодействующие с землей инструменты.
В варианте осуществления фиг. 7, пашущее орудие 10 может включать в себя один или более датчиков 224a, 224b, которые соединены с пашущим орудием 10. В одном примере, бесконтактный датчик может быть обеспечен перед каждым взаимодействующим с землей инструментом. Конечно, как описано выше, другие датчики могут быть также обеспечены на транспортном средстве 7 для работ. Упомянутые один или более датчиков, соединенные с пашущим орудием 10, могут быть использованы для определения оперативных данных поля, связанных с различными разными состояниями поля, такими как контур поля, влажность почвы, уровни уплотнения почвы или другие соответствующие состояния поля, которые могут влиять на глубину обработки взаимодействующего с землей инструмента 122а.
Первый датчик 224а этого примера расположен перед взаимодействующим с землей инструментом 122а для определения параметров почвы непосредственно перед соответствующим взаимодействующим с землей инструментом 122а. Датчик 224а дополнительно соединен с блоком 202, 204 управления, который может быть связан либо с пашущим орудием 10, либо с транспортным средством 7 для сельскохозяйственных работ.
Второй датчик 224b расположен на исполнительном механизме 110 устройства регулировки глубины, показанного на фиг. 7. Второй датчик 224b может быть датчиком положения для определения положения гидравлического цилиндра исполнительного механизма 110. Следует понимать, что положение гидравлического цилиндра исполнительного механизма 110 указывает на глубину обработки взаимодействующего с землей инструмента 122а. Соответственно, данные, обеспечиваемые вторым датчиком 224b, позволяют блоку 202, 204 управления определять текущую глубину обработки взаимодействующего с землей инструмента 122а. Как описано выше, блок 202, 204 управления может использовать данные, обеспечиваемые первым и вторым датчиками 224a, 224b, для определения требуемой глубины обработки на основе управляющих данных, принимаемых от первого датчика 224а, и сравнения требуемой глубины обработки с текущей глубиной обработки, определяемой на основе данных, принимаемых от второго датчика 224b.
Следует понимать, что средство регулировки глубины, показанное на фиг. 7, является только одним вариантом осуществления из многих различных вариантов осуществления. Например, четырехзвенный рычажный механизм 114 устройства регулировки глубины может быть также заменено единственным поворотным звеном или удлиняемой опорной ножкой, которая расположена под косым углом относительно основной рамы. Подобным образом, исполнительный механизм 110 может быть заменен любым другим пригодным исполнительным механизмом, таким как электродвигатель или пневматический исполнительный механизм.
Перечисление или обсуждение предположительно ранее опубликованного документа в этом описании изобретения не следует обязательно считать подтверждением того, что этот документ является частью предшествующего уровня техники или относится к общеизвестным сведениям.
Предпочтения и варианты для данного аспекта, признака или параметра настоящего изобретения следует считать, если контекст не указывает на иное, предпочтениями и вариантами, раскрытыми в комбинации с любыми или всеми предпочтениями и вариантами для всех других аспектов, признаков и параметров настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПАШУЩАЯ СИСТЕМА, СПОСОБ ЕЁ РАБОТЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2020 |
|
RU2742473C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2748065C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2020 |
|
RU2738484C1 |
| Плуг | 2020 |
|
RU2742830C1 |
| ПЛУГ, СПОСОБ РАБОТЫ ПЛУГА, РЕАЛИЗУЕМЫЙ С ПОМОЩЬЮ КОМПЬЮТЕРА, И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА. | 2020 |
|
RU2739366C1 |
| Сельскохозяйственное орудие | 2020 |
|
RU2748066C1 |
| КРЕПЕЖНЫЙ УЗЕЛ ДЛЯ ПРЕДПЛУЖНИКОВ ПЛУГА | 2020 |
|
RU2748067C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2742914C1 |
| СПОСОБ ОБРАБОТКИ ЗАДЕРНЕЛЫХ ПОЧВ И ПЛУГ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2339205C2 |
| Агрегат для ярусной вспашки | 1982 |
|
SU1034622A1 |

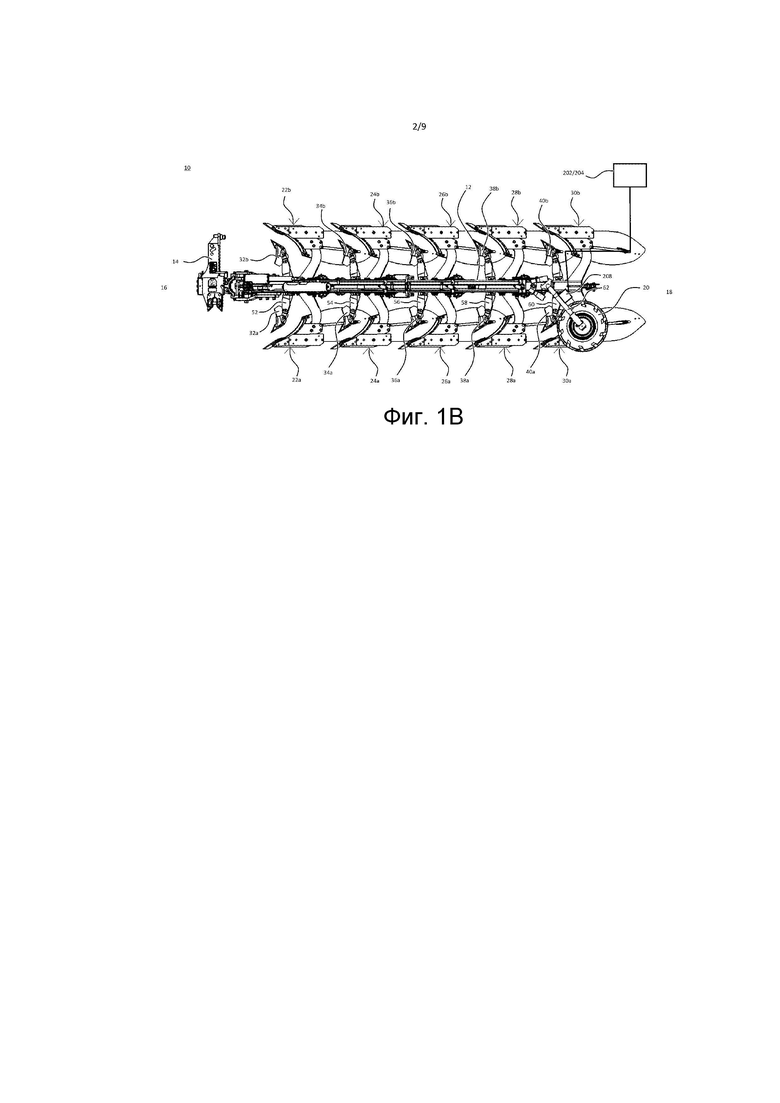



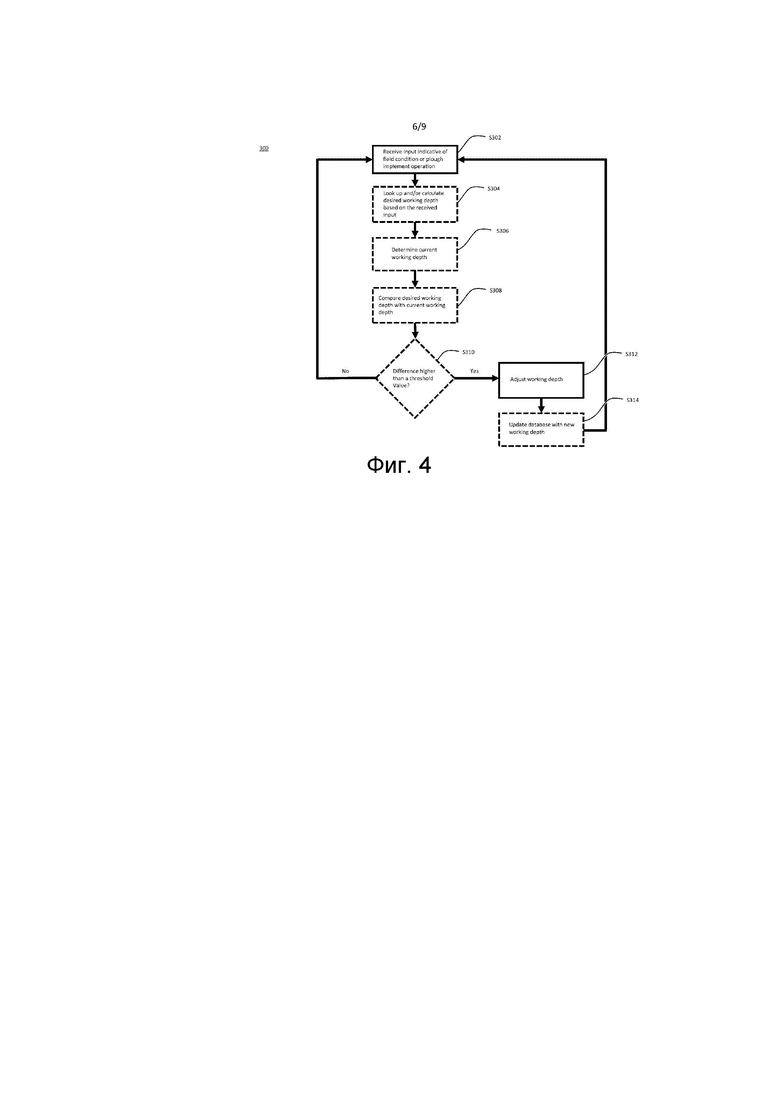
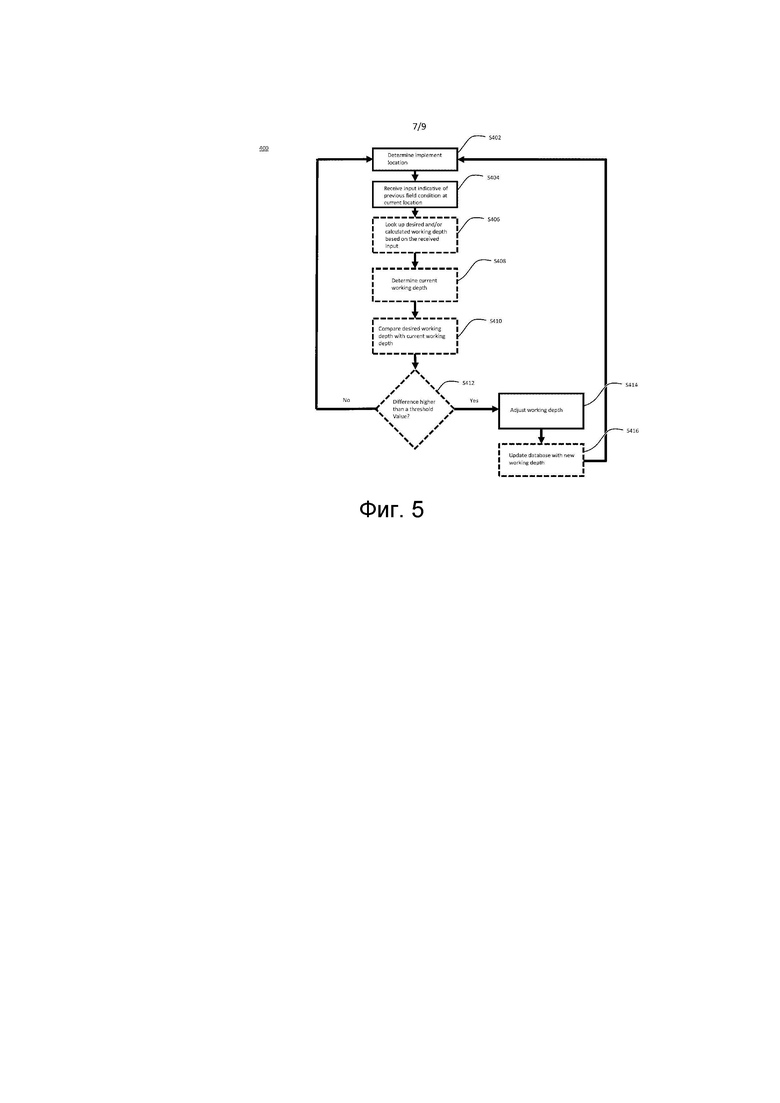

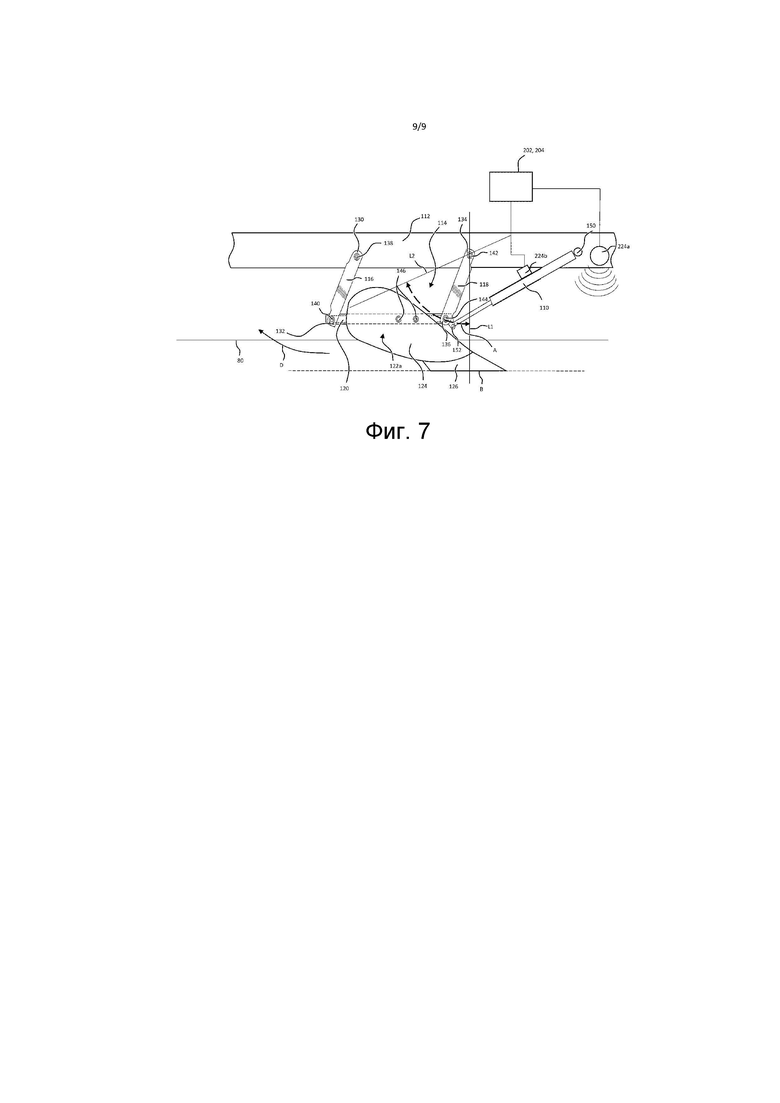
Настоящее изобретение относится к способу регулировки глубины обработки пашущего орудия, причем пашущее орудие содержит множество взаимодействующих с землей инструментов для проникновения в почву и ее перемещения и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного из взаимодействующих с землей инструментов, причем способ включает этапы, на которых принимают управляющие данные, указывающие на по меньшей мере одно из операций пашущего орудия или состояния поля, через которое пашущее орудие перемещается, и автоматически управляют операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе принимаемых управляющих данных. Способ обеспечивает автоматическое управление глубиной пашущего орудия на основе информации, которая может относиться либо к операции самого пашущего орудия, либо к состоянию поля, через которое пашущее орудие перемещается. 2 н. и 13 з.п. ф-лы, 9 ил.
1. Способ регулировки глубины обработки пашущего орудия, причем пашущее орудие содержит множество взаимодействующих с землей инструментов для проникновения в почву и ее перемещения и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного из взаимодействующих с землей инструментов, причем способ включает этапы, на которых:
принимают управляющие данные, указывающие на по меньшей мере одно из операций пашущего орудия или состояния поля, через которое пашущее орудие перемещается;
автоматически управляют операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе принимаемых управляющих данных.
2. Способ по п. 1, в котором пашущее орудие содержит множество устройств регулировки глубины, причем каждое устройство регулировки глубины выполнено с возможностью независимого регулирования глубины обработки по меньшей мере одного из множества взаимодействующих с землей инструментов, и причем этап автоматического управления операцией устройства регулировки глубины включает этап, на котором управляют операциями двух или более устройств регулировки глубины таким образом, чтобы глубины обработки двух или более из множества взаимодействующих с землей инструментов изменялись независимо друг от друга.
3. Способ по п. 1 или 2, в котором управляющие данные содержат данные поля, указывающие на характеристики почвы ниже поверхности земли поля, через которое перемещается пашущее орудие.
4. Способ по любому из пп. 1-3, в котором управляющие данные содержат данные поля, связанные с текущим состоянием поля, через которое перемещается пашущее орудие.
5. Способ по п. 4, в котором упомянутый по меньшей мере один взаимодействующий с землей инструмент является плужным корпусом и данные поля указывают на глубину борозды, создаваемой упомянутым по меньшей мере одним плужным корпусом.
6. Способ по п. 3 или 4, в котором данные поля указывают на одно или более из:
влажности почвы;
уровней уплотнения почвы;
температуры почвы;
контуров поля;
типа растительных остатков, подлежащих запахиванию;
типа почвы;
способности почвы отводить воду;
времени года.
7. Способ по любому из пп. 3-6, в котором данные поля указывают на границу между областью обработки и краем поля.
8. Способ по любому из пп. 3-7, в котором множество возможных данных поля запоминают в базе данных и этап автоматического управления операцией устройства регулировки глубины включает в себя этапы, на которых:
принимают данные о местоположении пашущего орудия на поле; и
используют данные о местоположении для выбора одних из возможных данных поля в качестве данных поля.
9. Способ по любому из пп. 1-8, в котором управляющие данные содержат данные орудия, связанные с операцией пашущего орудия.
10. Способ по п. 9, в котором данные орудия указывают на одно или более из:
скорости пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ;
сопротивления вспашке, испытываемого пашущим орудием и/или по меньшей мере одним взаимодействующим с землей инструментом;
проскальзывания колеса, испытываемого колесом пашущего орудия и/или соответствующего транспортного средства для сельскохозяйственных работ;
поперечного расстояния между смежными взаимодействующими с землей инструментами пашущего орудия.
11. Способ по любому из пп. 1-10, включающий этап, на котором находят и/или вычисляют требуемую глубину обработки, соответствующую принимаемым управляющим данным.
12. Способ по п. 11, включающий этап, на котором идентифицируют текущую глубину обработки по меньшей мере одного взаимодействующего с землей инструмента и сравнивают текущую глубину обработки с требуемой глубиной обработки и регулируют глубину обработки по меньшей мере одного взаимодействующего с землей инструмента, когда разница между текущей и требуемой глубиной обработки превышает заданное пороговое значение или падает ниже него.
13. Способ по любому из пп. 1-12, в котором упомянутый по меньшей мере один взаимодействующий с землей инструмент является предплужником.
14. Способ по любому из пп. 1-13, в котором пашущее орудие содержит основную раму, которая является переводимой между первой конфигурацией, в которой первый взаимодействующий с землей инструмент находится в рабочем положении, и второй конфигурацией, в которой второй взаимодействующий с землей инструмент находится в рабочем положении, и причем этап управления операцией устройства регулировки глубины включает этап, на котором одновременно и одинаково регулируют глубину обработки первого и второго взаимодействующего с землей инструмента.
15. Сельскохозяйственное пашущее орудие (10), содержащее:
множество взаимодействующих с землей инструментов (22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b), включающих в себя по меньшей мере один взаимодействующий с землей инструмент для проникновения в почву и ее перемещения, и устройство регулировки глубины, выполненное с возможностью регулирования глубины обработки по меньшей мере одного взаимодействующего с землей инструмента;
блок (202, 204) управления для приема управляющих данных, указывающих на по меньшей мере одно из операции пашущего орудия (10) или состояния поля, через которое перемещается пашущее орудие (10),
причем блок (202, 204) управления выполнен с возможностью автоматического управления операцией устройства регулировки глубины таким образом, чтобы глубина обработки по меньшей мере одного взаимодействующего с землей инструмента регулировалась на основе управляющих данных, принимаемых блоком управления.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление к жатвенным машинам для подъема полегших стеблей и укладывания их на платформу | 1929 |
|
SU18990A1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ОБРАБОТКОЙ ПОЧВЫ СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ (ВАРИАНТЫ) | 2013 |
|
RU2580449C2 |

