УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к сельскохозяйственному плугу и способу работы плуга.
В сельском хозяйстве соблюдаются фермерские циклы, которые можно условно разделить на различные этапы подготовки земли, посева семян, внесения удобрений, орошения, выращивания сельскохозяйственных культур и сбора урожая.
Каждый из этих этапов имеет решающее значение для получения оптимальных результатов урожая и достижения желаемой отдачи от первоначальных инвестиций.
Из перечисленных этапов, подготовка почвы обычно дополнительно делится на этапы, при необходимости, очистки препятствий (например, кустарников, камней и булыжников) и последующей обработки почвы.
Обработка почвы крошит и разрыхляет почву, улучшает структуру почвы и вносит растительные остатки и навоз в почву, таким образом, удобряя землю.
Улучшенная структура почвы позволяет увеличить рост корней растений, аэрацию почвы и проникновение/фильтрацию воды.
В целом, это приводит к повышению урожайности, улучшению долгосрочного плодородия почвы, удержанию влаги в почве и борьбе с сорняками.
Обработка почвы может быть разделена на первичную (относительно глубокую) и вторичную (относительно мелкую) обработку почвы.
При первичной обработке почвы, такой как вспашка, почва переворачивается так, что питательные вещества выходят на поверхность.
В дополнение к обработке почвы для доставки свежих питательных веществ на верхнюю часть и отложению остатков растений ниже, где они будут разрушаться, этот процесс также проветривает землю, позволяя ей удерживать больше влаги.
Подготовка почвы на большую глубину приводит к более грубой обработке поверхности, чем вторичная обработка почвы.
Вторичная обработка почвы (например, возделывание семян) разбивает комки почвы на меньшие массы, что может быть желательно для небольших семян или растений, которые имеют минимальную способность к переработке комков.
Первичная обработка почвы, и особенно вспашка, широко рассматривается как один из наиболее эффективных способов предотвращения болезней сельскохозяйственных культур, удаления сорняков и борьбы с мышами и другими вредителями.
В своей простейшей форме переворотный плуг, также известный как отвальный плуг, включает в себя различные плужные корпуса, которые являются лезвиями для проникновения и переворачивания почвы в рядах соседних канавок, известных как борозды.
Современные плуги обычно включают в себя множество плужных корпусов, соединенных с рамой плуга таким образом, что они смещены в поперечном направлении друг от друга, когда плуг используется.
Каждый плужный корпус соединен с рамой плуга посредством соответствующих балок.
Рама плуга, в свою очередь, соединена с буксирующим или толкающим транспортным средством через сцепное устройство, расположенное на переднем или заднем конце рамы.
В зависимости от плотности почвы, рабочая глубина плужных корпусов может быть отрегулирована.
Например, рабочая глубина плужных корпусов может быть небольшой в более твердых (плотных) почвах, тогда как более глубокая рабочая глубина может применяться в более мягких (менее плотных) почвах.
Плужные корпуса могут быть жестко прикреплены к основной раме, так что их расстояние от основной рамы остается постоянным.
Соответственно, рабочая глубина плугов затем регулируется путем изменения расстояния от поверхности земли основной рамы.
Если основная рама приближается к поверхности земли, расстояние от поверхности земли, и плужные корпуса проникают глубже в почву.
Аналогичным образом, если основная рама поднимается дополнительно от земли, расстояние от поверхности земли увеличивается, и плужные корпуса поднимаются из почвы, тем самым, уменьшая рабочую глубину.
Расстояние от поверхности земли основной рамы может регулироваться одним или более опорными колесами.
Одно или более опорных колес могут быть связаны с любой частью основной рамы, такой как задний конец основной рамы.
Регулируемое соединение между основной рамой и опорным колесом может быть предусмотрено для обеспечения возможности изменения расстояния между опорным колесом и основной рамой.
Во время вспашки опорное колесо движется по поверхности земли и выдерживает вес плуга.
Если расстояние между опорным колесом и основной рамой уменьшается, то соответственно уменьшается расстояние от поверхности земли между основной рамой и поверхностью земли.
С другой стороны, если расстояние между опорным колесом и основной рамой увеличивается, расстояние от поверхности земли основной рамы увеличивается.
Как указано выше, изменение расстояния от поверхности земли основной рамы приводит к изменению рабочей глубины плужного корпуса.
Большинство современных плугов имеют оборотный тип, в котором основная рама поворачивается на 180 градусов или около 180 градусов (то есть переворачивается) относительно сцепного устройства.
Поворотный цилиндр, прикрепленный к сцепному устройству, может использоваться для поворота (реверса) плуга.
Во время поворота основной рамы, первый набор плужных корпусов, который первоначально был расположен ниже основной рамы (первая конфигурация), переносится в верхнюю часть основной рамы.
В то же время второй набор плужных корпусов, который первоначально был расположен сверху основной рамы, затем перемещается в положение ниже основной рамы.
Оборотный плуг тогда находится во второй конфигурации.
Основная рама может многократно поворачиваться (переворачиваться) между первой и второй конфигурацией, особенно во время маневров поворота на поворотных полосах.
Всякий раз, когда плуг переворачивается, первый и второй набор плужных корпусов меняются местами.
В оборотных плугах средство для регулировки рабочей глубины плужных корпусов (т.е. основной рамы) требуется для обеих конфигураций оборотного плуга.
Существует в основном два типа колес для контроля глубины для оборотных плугов.
Первый тип включает в себя одно вращающееся опорное колесо, которое используется в обеих конфигурациях оборотного плуга.
Одно вращающееся опорное колесо должно перемещаться с одной стороны основной рамы на другую во время оборачивания.
Эта боковая передача одного опорного колеса может быть достигнута путем поворота последнего с одной стороны на другую.
Второе решение устраняет необходимость перемещения колеса регулировки глубины от одной стороны к другой.
Во втором варианте два отдельных опорных колеса могут быть прикреплены к основной раме.
Первое опорное колесо может быть расположено на первой стороне основной рамы, а второе опорное колесо может быть расположено на второй, противоположной стороне основной рамы.
Каждое из двух колес затем используется только в одной конфигурации плуга.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты и варианты осуществления изобретения обеспечивают сельскохозяйственное орудие, как заявлено в прилагаемой формуле изобретения.
Согласно одному аспекту текущего изобретения предложен плуг, содержащий:
плужный корпус;
приводной механизм, который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса; и
контроллер, который выполнен с возможностью:
определения сигнала управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основании данных управления; и
обеспечения сигнала управления приводом приводному механизму.
Таким образом, установка угла наклона в продольной плоскости плужного корпуса может, предпочтительно, обеспечить управление вертикальной силой, испытываемой плужными корпусами.
Например, если вертикальная, направленная вниз, сила на плужном корпусе будет слишком большой, тогда весь плуг может потянуть вниз так, что сила, прилагаемая опорным колесом к земле, может быть слишком высокой.
Если вертикальная, направленная вверх, сила на плужном корпусе будет слишком большой, или вертикальная, направленная вниз, сила на плужном корпусе будет слишком малой, то плужный корпус может быть подвержен перемещению вверх, если он испытывает изменение условий вспашки, например плотность почвы.
То есть плужный корпус может быть слишком чувствительным к изменениям условий вспашки, так что он слишком легко перемещается вверх от предполагаемой рабочей глубины.
Плужный корпус может поворачиваться вокруг оси, которая является поперечной к направлению движения плуга.
Данные управления могут содержать данные о вертикальной силе, которая представляет силу, направленную вверх или вниз, испытываемую плужным корпусом во время его работы в поле.
Плуг может дополнительно содержать датчик силы, связанный с плужным корпусом.
Датчик силы может быть выполнен с возможностью обеспечения данных о вертикальной силе.
Плуг может дополнительно содержать датчик взаимодействия колеса с землей, связанный с взаимодействующим с землей колесом плуга.
Датчик взаимодействия колеса с землей может быть выполнен с возможностью обеспечения данных о вертикальной силе.
Плуг может дополнительно содержать: сцепное устройство для соединения плуга с сельскохозяйственным транспортным средством; и датчик сцепного устройства, связанный со сцепным устройством, причем датчик сцепного устройства выполнен с возможностью обеспечения данных о вертикальной силе.
Контроллер может быть выполнен с возможностью:
приема сигналов датчика более чем от одного из: датчика силы, датчика взаимодействия колеса с землей, и датчика сцепного устройства; и
объединения этих сигналов для того, чтобы определять данные вертикальной силы.
Данные управления могут содержать данные контроля глубины, которые представляют команду для изменения глубины плужного корпуса относительно поверхности земли, на которой работает плуг.
Контроллер может быть выполнен с возможностью определения сигнала управления приводом на основе данных контроля глубины для того, чтобы:
увеличить угол наклона в продольной плоскости плужного корпуса, если данные контроля глубины представляют команду для увеличения глубины плужного корпуса относительно поверхности земли; и
уменьшить угол наклона в продольной плоскости плужного корпуса, если данные контроля глубины представляют команду для уменьшения глубины плужного корпуса относительно поверхности земли.
Данные управления могут содержать данные расположения поля, которые представляют одно или более свойств поля, в котором работает плуг.
Данные расположения поля могут содержать одно или более из:
(i) данных расположения границ поля, которые определяют границы поля, которое должно быть вспахано,
(ii) данных расположения границ поворотной полосы, которые определяют расположение одной или более поворотных полос в поле, которое должно быть вспахано, и
(iii) данных о местоположении препятствий, которые определяют местоположение препятствий в поле.
Сигнал управления приводом может быть выполнен с возможностью установки угла наклона в продольной плоскости плужного корпуса таким образом, чтобы сила, направленная вверх или вниз, испытываемая плужным корпусом, была выше, чем нижнее пороговое значение силы, и/или ниже, чем верхнее пороговое значение силы.
Верхнее пороговое значение силы может представлять максимальную направленную вниз силу на плужном корпусе.
Нижнее пороговое значение силы может представлять собой минимальную направленную вниз силу на плужном корпусе или максимальную направленную вверх силу на плужном корпусе.
Плуг может дополнительно содержать: раму; и балку.
Корпус плуга может быть соединен с рамой балкой.
Балка может быть соединена с возможностью поворота с рамой.
Приводной механизм может быть выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса путем его поворота относительно балки.
Также раскрыт реализуемый на компьютере способ работы плуга, содержащего:
плужный корпус;
приводной механизм, который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса;
при этом способ включает этапы, на которых:
определяют сигнал управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основании данных управления; и
обеспечивают сигнал управления приводом приводному механизму.
Плуг может быть оборотным плугом.
Может быть предусмотрено сельскохозяйственная машина, содержащая сельскохозяйственное транспортное средство и любой раскрытый здесь плуг, причем сельскохозяйственное транспортное средство предназначено для приведения в действие плуга.
Плуг может быть соединен к передней или задней части сельскохозяйственного транспортного средства.
Может быть предусмотрена компьютерная программа, которая при запуске на компьютере заставляет компьютер конфигурировать любое устройство, включая контроллер, раскрытый в данном документе, или выполнять любой способ, раскрытый в данном документе.
Компьютерная программа может быть программной реализацией, и компьютер может рассматриваться как любое подходящее аппаратное обеспечение, включая процессор цифровых сигналов, микроконтроллер и реализацию в постоянном запоминающем устройстве (ПЗУ), стираемом программируемом постоянном запоминающем устройстве (СППЗУ) или в электронно стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) в качестве не ограничивающих примеров.
Программное обеспечение может быть программой сборки.
Компьютерная программа может быть предоставлена на машиночитаемом носителе, который может быть физическим машиночитаемым носителем, таким как диск или устройство памяти, или может быть воплощен как кратковременный сигнал.
Такой кратковременный сигнал может быть загружен по сети, включая загрузку через Интернет.
В пределах объема этой заявки, явно предполагается, что могут быть приняты различные аспекты, варианты осуществления, примеры и альтернативы, изложенные в предыдущих абзацах, а также формула изобретения и/или последующее описание и чертежи, и, в частности, их отдельные признаки самостоятельно или в любой комбинации.
То есть все варианты осуществления и все признаки любого варианта осуществления могут комбинироваться любым способом и/или комбинацией, если только такие признаки не являются несовместимыми.
Заявитель оставляет за собой право изменить любую первоначально поданную заявку или подать любую новую заявку соответствующим образом, включая право вносить изменения в любую первоначально поданную заявку, чтобы она зависела от и/или учитывала любую особенность любой другой заявки, хотя она первоначально не была заявлена таким образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один или более вариантов осуществления настоящего изобретения теперь будут описаны, только в качестве примера, со ссылкой на прилагаемые чертежи, на которых:
Фиг.1А показывает правосторонний вид сельскохозяйственного орудия с фиксированными взаимодействующими с землей инструментами;
Фиг.1В показывает левосторонний вид сельскохозяйственного орудия, показанного на фиг.1А;
Фиг.1С показывает вид в плане сельскохозяйственного орудия, показанного фиг.1А;
Фиг.2 показывает схематичное представление траектория движения сельскохозяйственной машины в рабочей зоне;
Фиг.3 схематично показывает часть плуга, который включает контроллер и приводной механизм;
Фигуры 4А, 4В и 4С иллюстрируют часть плуга, который включает в себя приводной механизм для регулировки угла наклона в продольной плоскости плужного корпуса, причем плужный корпус имеет первый угол наклона в продольной плоскости относительно балки;
Фигуры 5А, 5В и 5С иллюстрируют виды той же части плуга, которая показана на фигурах 4А-4С, причем плужный корпус имеет второй угол наклона в продольной плоскости относительно балки; и
Фиг.6 иллюстрирует пример варианта осуществления способа работы плуга.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
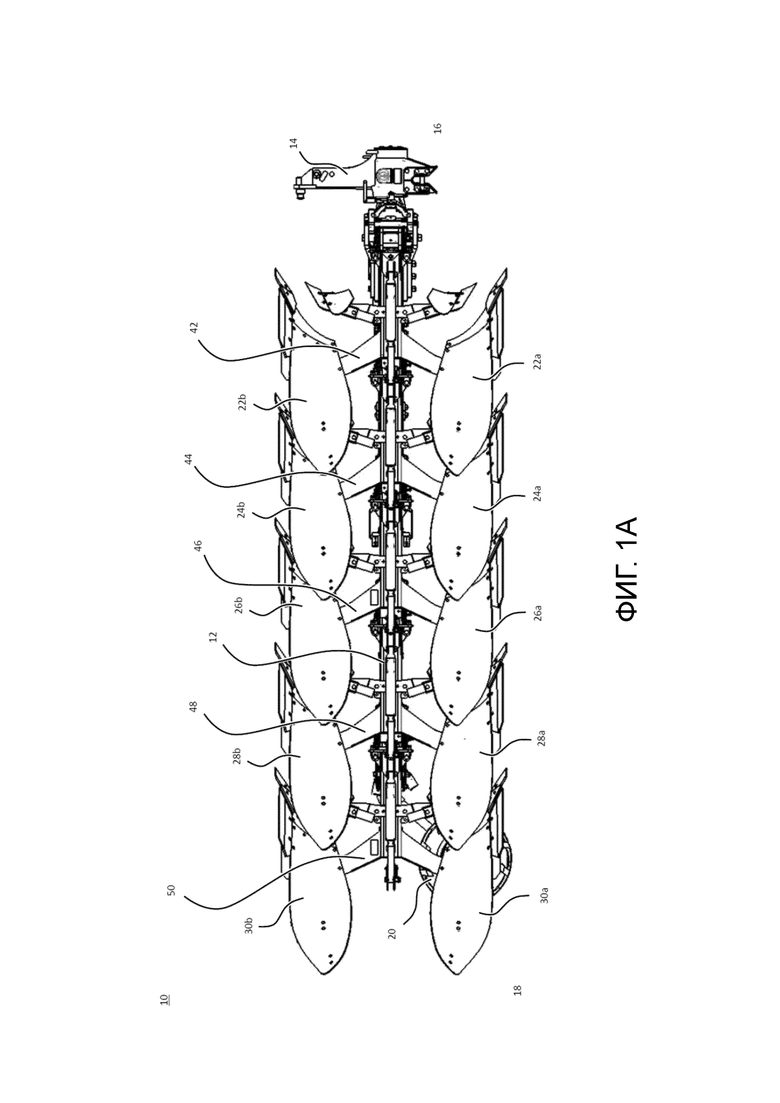
Фигуры 1А-1С показывают различные виды сельскохозяйственного орудия, в частности, плуга 10.
Как будет описано более подробно ниже, плуг 10, показанный на фигурах 1А-1С, является оборотным плугом.
Плуг 10 содержит основную раму 12.
Основная рама 12 может представлять собой прямоугольную или круглую трубу, продолжающуюся между сцепным устройством 14 на переднем конце 16 плуга по направлению к опорному колесу 20 на заднем конце 18 плуга.
Основная рама 12 поддерживает множество взаимодействующих с землей инструментов.
В примере на фигурах 1А-1С взаимодействующие с землей инструменты включают в себя плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28а, 28b, 30а, 30b и предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38б, 40а, 40b плуга.
Множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а, 30а и предплужники 32а, 34а, 36а, 38а и 40а плуга, расположены на первой стороне основной рамы 12.
В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество первых взаимодействующих с землей инструментов расположены ниже основной рамы 12.
Множество вторых взаимодействующих с землей инструментов, то есть плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b и 40b плуга, расположены на второй стороне основной рамы 12, напротив множества первых взаимодействующих с землей инструментов.
В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество вторых взаимодействующих с землей инструментов расположены выше основной рамы.
Каждый из плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b соединен с основной рамой 12 посредством балок 42, 44, 46, 48, 50.
Каждая из балок 42, 44, 46, 48, 50 имеет, по существу, Y-образную структуру.
Первая балка 42 поддерживает первую пару плужных корпусов 22a, 22b.
Вторая балка 44 поддерживает вторую пару плужных корпусов 24a, 24b.
Третья балка 46 поддерживает третью пару плужных корпусов 26a, 26.
Четвертая балка 48 поддерживает четвертую пару плужных корпусов 28a, 28b.
Пятая балка 50 поддерживает пятую пару плужных корпусов 30a, 30b.
Каждая из пар плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b предназначена для создания борозды в поле, когда плуг тянется позади или толкается сельскохозяйственным транспортным средством, таким как трактор.
Из этого следует, что каждый проход иллюстрированного плуга 10 через поле создает пять смежных борозд.
Первая опорная балка 52 поддерживает первую пару предплужников 32a, 32b.
Вторая опорная балка 54 поддерживает вторую пару предплужников 34a, 34b.
Третья опорная балка 56 поддерживает третью пару предплужников 36a, 36b.
Четвертая опорная балка 58 поддерживает четвертую пару предплужников 38a, 38b.
Пятая опорная балка 60 поддерживает пятую пару предплужников 40a, 40b.
Предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b и/или их соответствующие крепежные рейки 52, 54, 56, 58, 60 могут быть регулируемыми относительно основной рамы 12 для изменения расстояния между предплужниками 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b и основной рамой 12.
В одном примере, предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b могут быть подвижными вверх и вниз по направлению к основной раме 12 и от нее для индивидуальной регулировки рабочей глубины каждого из предплужников 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b.
Предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b могут быть регулируемыми вручную или автоматически.
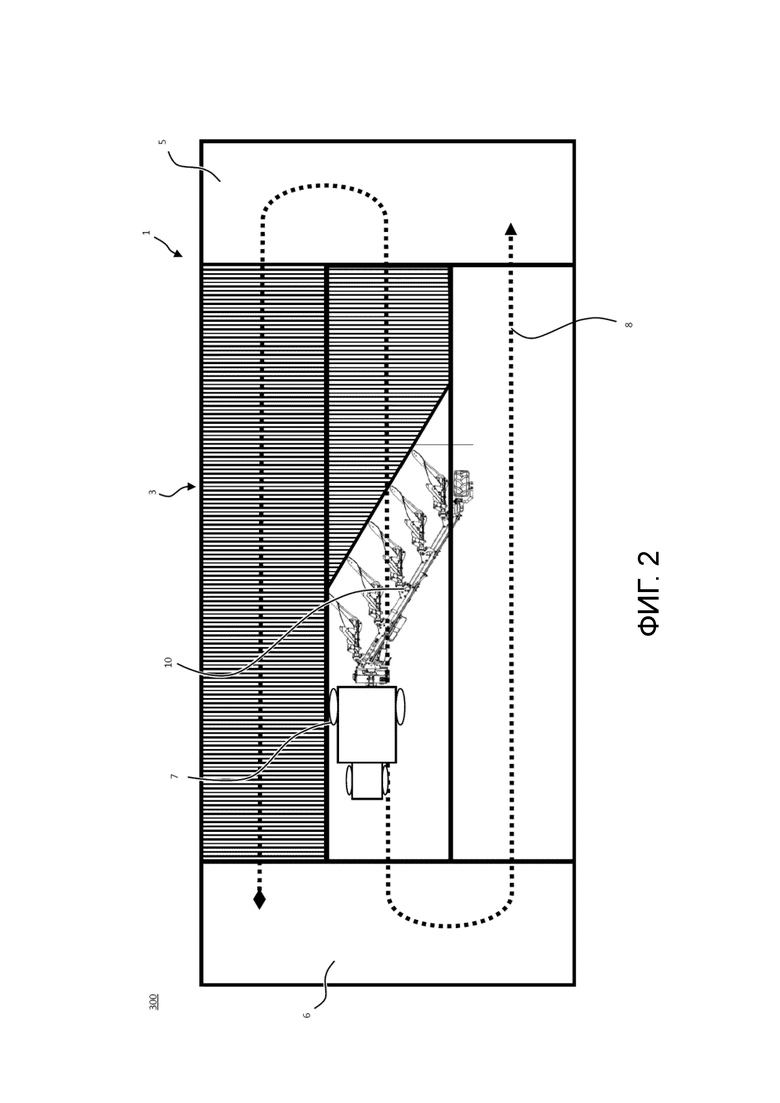
Обращаясь к фиг.2, описана типичная работа сельскохозяйственной машины, содержащей трактор 7 и плуг 10.
При использовании, плуг 10 тянется как прицеп (орудие) позади сельскохозяйственного буксировочного транспортного средства (например, трактора 7).
Следует понимать, что эквивалентно возможно расположить плуг 10 перед или как перед, так позади трактора 7.
Фиг.2 показывает схему рабочей зоны 1, например, поля культуры, которое разделено на основное поле 3 и поворотные полосы 5, 6.
Трактор 7 тянет плуг 10 по основному полю 3, в целом, параллельными рабочими рядами.
Рабочие ряды являются частью траектории 8 трактора 7 и обычно проходят параллельно с длинным краем рабочей зоны 1.
Каждый рабочий ряд представляет отдельный проход сельскохозяйственной машины по полю между поворотными полосами 5 и 6.
Как будет более подробно описано ниже, пяти бороздовой плуг, такой как примерный плуг, показанный на фигурах 1А-1С, создает в общей сложности пять борозд за один проход.
В конце каждого прохода/рабочего ряда, трактор 7 и плуг 10 используют приближающуюся поворотную полосу 5 или 6 для разворота, как показано траекторией 8.
В данной области техники известно, что почва поворотных полос 5, 6 подвержена более высоким уровням уплотнения почвы, поскольку она получает больше нагрузки на единицу площади, чем основное поле 3.
Известно, что для того, чтобы не нарушать почву на поворотных полосах 5, 6 больше, чем это необходимо, необходимо поднять взаимодействующие с землей инструменты, такие как плужные корпуса и предплужники, от земли в поворотной полосе, или транспортное положение непосредственно перед достижением плугом 10 поворотной полосы 5 или 6, соответственно.
После того, как трактор 7 и соответствующий плуг 10 повернули на поворотную полосу 5, 6, взаимодействующие с землей инструменты плуга 10 снова опускаются в рабочее положение, чтобы зацепиться с почвой основного поля 3.
На иллюстрации фиг.2, плуг 10 работает на основном поле 3 и, следовательно, расположен в рабочем положении.
Когда плуг 10 достигает границы между поворотной полосой 5/6 и основным полем 3, плуг 10 переводится в поворотное/транспортное положение.
Отсюда следует, что каждый рабочий ряд начинается с регулировки плуга из транспортного положения в рабочее положение и заканчивается регулировкой плуга из рабочего положения в транспортное положение.
Плуг 10, показанный на фигурах 1А-1С, является полностью установленным.
В полностью установленных плугах, вес плуга переносится исключительно трактором, когда плуг находится в своем транспортном положении (на поворотной полосе).
Другими словами, плуг затем поддерживается исключительно трактором 7 через сцепное устройство 14 и может подниматься над землей подъемным цилиндром рычажной передачи трактора.
Во время поворотного движения на поворотных полосах, плуг 10 также переворачивается.
То есть основная рама 12 поворачивается на 180 градусов относительно сцепного устройства 14 для перемещения плуга из первой конфигурации во вторую конфигурацию.
Следует понимать, что если оператор пашет в борозде, то основная рама 12 может не поворачиваться точно на 180 градусов, скорее всего, она составит 190-200 градусов или 160-170 градусов в зависимости от того, в каком направлении основная рама 12 поворачивается.
Если оператор пашет на земле, то основная рама 12 может поворачиваться на угол, который ближе к 180 градусам, возможно, точно к 180 градусам.
В своей первой конфигурации, показанной на фигурах 1А-1С, плуг 10 настроен так, что плужные корпуса 22а, 24а, 26а, 28а и 30а каждой из пар находится в контакте с почвой.
Эта первая конфигурация показана на фиг.2 и иногда упоминается как «конфигурация с поворотом вправо», поскольку отвалы плужных корпусов 22а, 24а, 26а, 28а и 30а выполнены с возможностью перемещения почвы вбок слева направо, если смотреть в направление движения.
Во второй конфигурации (не показана) плуг 10 настроен так, что плужные корпуса 22b, 24b, 26b, 28b и 30b каждой из пар находятся в контакте с почвой.
Эта вторая конфигурация достигается после поворота основной рамы на 180 градусов, так что большинство плужных корпусов затем расположены справа от трактора (не показано).
Отсюда следует, что вторая конфигурация также упоминается как «конфигурация с поворотом влево».
Обработка поля плугом 10 в этой первой конфигурации обеспечивает первую борозду, созданную первым плужным корпусом 22а, вторую борозду, созданную вторым плужным корпусом 24а, третью борозду, созданную третьим плужным корпусом 26а, четвертую борозду, созданную четвертым плужным корпусом 28а и пятую борозду, созданную пятым плужным корпусом 30а.
Ширина борозды определяется поперечным расстоянием d между плужными корпусами 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b, как иллюстрировано на фиг.1C.
Когда оборотный плуг 10 достигает конца первого прохода, основная рама 12 поворачивается на 180 градусов (переворачивается) относительно сцепного устройства 14.
Поворотный цилиндр (не показан), прикрепленный к сцепному устройству 14, может использоваться для поворота (переворота) плуга 10.
Во время поворота основной рамы первое множество плужных корпусов, например, 22а, 24а, 26а, 28а, 30а, переносятся на верхнюю часть плуга 10.
В то же время, второе множество плужных корпусов, например 22b, 24b, 26b, 28b, 30b, которые не использовались в предыдущем проходе, затем переносятся на нижний конец плуга 10 и будут погружаться в почву во время следующего прохода.
Оборотный плуг затем находится во второй конфигурации (не показана).
Выполнение второго прохода поля плугом 10 в этой второй конфигурации обеспечивает первую борозду, созданную шестым плужным корпусом 22b, вторую борозду, созданную седьмым плужным корпусом 24b, третью борозду, созданную восьмым плужным корпусом 26b, четвертую борозду, созданную девятым плужным корпусом 28b, и пятую борозду, созданную десятым плужным корпусом 30b.
Оборотный плуг 10 между последовательными проходами имеет то преимущество, что плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b, которые зацепляются с почвой, всегда обращены к одному и тому же боковому краю основного поля 3, независимо от ориентации трактора.
В обеих конфигурациях плуга 10, основная рама 12 поддерживается опорным колесом 20.
Опорное колесо 20 расположено на заднем конце 18 плуга 10.
Поскольку плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b обычно прикреплены к основной раме через балки 42, 44, 46, 48 и 50, это не позволяет регулировать рабочую глубину упомянутых взаимодействующих с землей инструментов, не изменяя расстояние от поверхности земли основной рамы 12.
Для этого плуг 10, показанный на фигурах 1А-1С, включает в себя опорное колесо 20, которое действует как опорное колесо для регулировки расстояния от поверхности земли основной рамы 12.
Регулируемое соединение 62, предусмотренное между опорным колесом 20 и основной рамой 12, позволяет оператору поднимать или опускать основную раму 12 относительно поверхности земли.
Поскольку положение множества первого и второго взаимодействующих с землей инструментов фиксировано относительно основной рамы 12, любое изменение расстояния от поверхности земли основной рамы также будет влиять на рабочую глубину множества первых и вторых взаимодействующих с землей инструментов.
В частности, если основная рама 12 опускается путем регулировки соединения между опорным колесом 20 и основной рамой 12, то рабочая глубина множества первых взаимодействующих с землей инструментов, показанных на фигурах 1А-1С, увеличивается, то есть множество первых взаимодействующих с землей инструментов опускаются дополнительно в почву.
Если, с другой стороны, основная рама 12 поднимается, то рабочая глубина множества первых взаимодействующих с землей инструментов уменьшается, т.е. множество первых взаимодействующих с землей инструментов поднимаются.
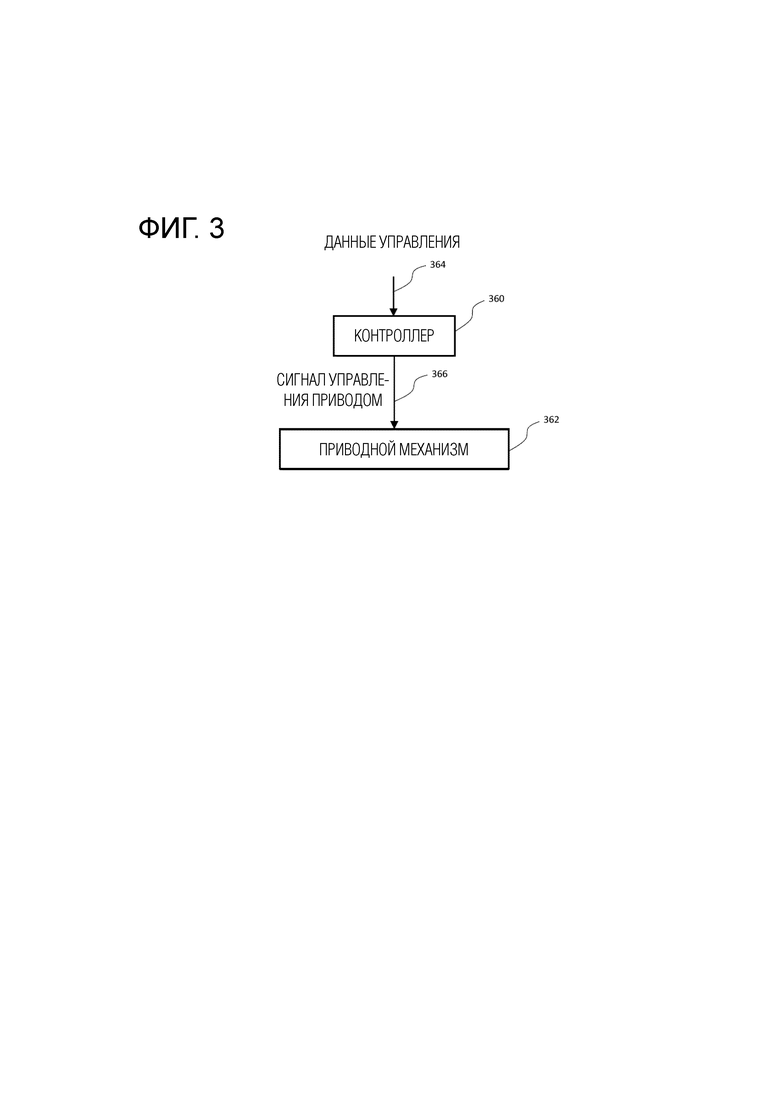
Фиг.3 схематично показывает часть плуга, который включает контроллер 360 и приводной механизм 362.
Плуг также включает плужный корпус, который не показан фиг.3.
Плужный корпус является вращательным/поворотным вокруг оси, которая является поперечной к направлению перемещения плуга, так что угол наклона в продольной плоскости плужного корпуса может быть регулируемым.
Плужный корпус может быть поворотным относительно балки или рамы плуга или какой-либо другой части плуга.
Приводной механизм 362 предназначен для регулировки угла наклона в продольной плоскости плужного корпуса.
Таким образом, приводной механизм 362 может изменять ориентацию плужного корпуса относительно поверхности земли.
Пример реализации приводного механизма описан ниже со ссылкой на фигуры 4A-4C и 5A-5C.
Контроллер 360 определяет сигнал 366 управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основе принятых данных 364 управления.
Затем контроллер 360 может обеспечивать сигнал 366 управления приводом приводному механизму 362 так, что угол наклона в продольной плоскости плужного корпуса автоматически регулируется.
Угол наклона в продольной плоскости может быть определен как угол между горизонтальной плоскостью и продольной осью плужного корпуса.
Угол наклона в продольной плоскости может быть увеличен посредством поворота плужного корпуса таким образом, что точка плужного корпуса опускается.
Угол наклона в продольной плоскости может быть уменьшен посредством поворота плужного корпуса так, что точка плужного корпуса поднимается.
Регулировка угла наклона в продольной плоскости плужного корпуса будет влиять на величину подъемной силы/прижимной силы, которую испытывает плужный корпус при его движении через почву.
То есть увеличение угла наклона в продольной плоскости плужного корпуса будет увеличивать силу, направленную вниз на плужный корпус.
Аналогичным образом, уменьшение угла наклона в продольной плоскости плужного корпуса будет уменьшать направленную вниз силу, испытываемую плужным корпусом.
В некоторых примерах, может быть полезным, чтобы вертикальная сила, испытываемая плужными корпусами, была выше, чем нижнее пороговое значение силы, и/или меньше, чем верхнее пороговое значение силы.
Например, если вертикальная, направленная вниз, сила на плужном корпусе будет слишком большой (которая может рассматриваться как более высокая чем верхнее пороговое значение силы), тогда весь плуг может быть втянут вниз так, что сила, оказываемая опорным колесом на землю, может быть слишком высокой.
В этом случае, опорное колесо может застревать в почве, что препятствует движению плуга вперед и потенциально требует дополнительной энергии от движущегося транспортного средства для буксировки/толкания плуга.
Кроме того, дополнительная сила, прилагаемая к земле опорным колесом, может чрезмерно уплотнить грунт, по которому оно проходит.
Таким образом, верхнее пороговое значение силы может представлять максимальную направленную вниз силу на плужном корпусе.
Если вертикальная, направленная вверх, сила на плужном корпусе будет слишком большой, или вертикальная, направленная вниз, сила на плужном корпусе будет слишком малой (обе из которых могут рассматриваться как меньшие чем нижнее пороговое значение силы), то плужный корпус может быть подвержен перемещению вверх, если он испытывает изменение условий вспашки, например плотность почвы.
То есть плужный корпус может быть слишком чувствительным к изменениям условий вспашки, так что он слишком легко перемещается вверх от предполагаемой рабочей глубины.
Таким образом, нижнее пороговое значение силы может представлять собой минимальную направленную вниз силу на плужном корпусе или максимальную направленную вверх силу на плужном корпусе.
В одном примере данные управления могут включать в себя данные о вертикальной силе, которая представляет силу, направленную вверх или вниз, испытываемую плужным корпусом.
Плуг может содержать датчик силы, который прямо или косвенно связан с плужным корпусом для обеспечения данных о вертикальной силе.
Например, датчик силы может определять силу, испытываемую балкой или механизмом автоотвода от камней, который связан с плужным корпусом.
В некоторых примерах датчик взаимодействия колеса с землей, который связан с взаимодействующим с землей колесом плуга, может обеспечивать данные о вертикальной силе.
Например, датчик взаимодействия колеса с землей может определять данные вертикальной силы на основе давления в шине опорного колеса.
В качестве другого примера, датчик взаимодействия колеса с землей может определять данные о вертикальной силе на основе давления текучей среды в гидравлическом контуре, который включает в себя цилиндр, как часть регулируемой тяги с опорным колесом.
Оба приведенных в качестве примера значения давления могут использоваться для определения вертикальной силы, которая применяется к плужным корпусам при их перемещении через почву.
По желанию, датчик сцепного устройства может быть связан со сцепным устройством, так что он может обеспечивать данные о вертикальной силе.
Сцепное устройство предназначено для сцепления плуга с ведущим сельскохозяйственным транспортным средством, таким как трактор.
Датчик сцепного устройства может определять данные о вертикальной силе на основе давления текучей среды в гидравлическом контуре, который включает подъемный цилиндр для подъема или опускания сцепного устройства плуга относительно трактора.
В некоторых примерах контроллер 360 может принимать сигналы от множества датчиков разных типов и может объединять эти сигналы для определения данных о вертикальной силе.
Это может обеспечить преимущество путем регулирования шага плужных корпусов, чтобы обеспечить предпочтительное давление на колесо взаимодействия с землей для обеспечения требуемой рабочей глубины плужных корпусов.
Предпочтительным значением давления может быть минимальное значение давления.
Как указано выше, контроллер 360 может определять сигнал 366 управления приводом для установки угла наклона в продольной плоскости плужного корпуса так, что направленная вверх или вниз, испытываемая плужным корпусом, была ниже, чем нижнее пороговое значение силы, и/или выше, чем верхнее пороговое значение силы.
То есть принятые данные о вертикальной силе могут быть использованы в качестве обратной связи, чтобы гарантировать, что вертикальная сила, испытываемая плужным корпусом, находится в диапазоне значений.
Таким образом, прижимная сила/подъемная сила, испытываемая плужным корпусом, может быть установлена таким образом, чтобы операция вспашки могла выполняться с улучшенной топливной эффективностью (поскольку прижимная сила не может быть настолько большой, что для перемещения плуга по полю требуется значительная дополнительная энергия) и/или улучшенной консистенцией борозд плуга (поскольку менее вероятно, что плужный корпус поднимется с намеченной глубины вспашки во время использования).
В некоторых примерах данные 364 управления могут включать данные контроля глубины, которые представляют команду для изменения глубины плужного корпуса относительно поверхности земли, на которой работает плуг.
Такие данные контроля глубины могут быть определены из пользовательского ввода или алгоритма автоматического управления, который обеспечивается как часть известной операции вспашки, такой как часть процедуры разворота, когда плужные корпуса поднимаются из почвы в конце прохода по полю, а затем переустановки для следующего прохода.
В таких примерах сигнал 366 управления приводом может устанавливать угол наклона в продольной плоскости плужного корпуса таким образом, чтобы он испытывал вертикальную силу, которая способствует предполагаемому изменению глубины плужного корпуса.
Контроллер может определять сигнал 366 управления приводом на основании данных контроля глубины, чтобы:
(i) увеличить угол наклона в продольной плоскости плужного корпус, если данные контроля глубины представляют команду для увеличения глубины плужного корпуса относительно поверхности земли; и/или (ii) уменьшить угол наклона в продольной плоскости плужного корпуса, если данные контроля глубины представляют команду для уменьшения глубины плужного корпуса относительно поверхности земли.
Это может улучшить топливную эффективность трактора, который приводит в действие плуг, поскольку для поднятия или опускания плужного корпуса может потребоваться меньше энергии.
В таких примерах сигнал 366 управления приводом может быть обеспечен для приводного механизма 362 так, чтобы он работал параллельно с другим приводом для регулировки глубины плужных корпусов, таким как подъемный цилиндр и/или регулируемая тяга опорного колеса.
В некоторых примерах данные управления могут включать в себя: данные расположения поля, которые представляют одно или более свойств поля, в котором работает плуг; и данные о местоположении плуга, которые представляют местоположение плуга.
Более конкретно, в некоторых примерах, данные местоположения плуга могут представлять местоположение одного или более плужных корпусов.
Данные расположения поля могут включать в себя одно или более из (i) данных расположения границы поля, которые определяют границы поля, которое должно быть вспахано, (ii) данных расположения границы поворотной полосы, которые определяют местоположение одной или более поворотных полос в поле, которое должно быть вспахано, и (iii) данных о местоположении препятствий, которые определяют местоположение препятствий в поле, включая подземные препятствия, такие как булыжники и камни.
Понятно, что может быть желательно, изменить глубину плужных корпусов в этих местах.
Контроллер 360 может обрабатывать данные местоположения плуга и данные расположения поля для автоматической установки угла наклона в продольной плоскости, когда плужные корпуса находятся в этих конкретных местах для:
(i) уменьшения угла наклона в продольной плоскости, где данные расположения поля представляют местоположение, в котором должен быть поднят плужный корпус (например, приближается к границе поля изнутри поля, приближается к поворотной полосе или приближается к заглубленному камню), или (ii) увеличения угла наклона в продольной плоскости, где данные расположения поля представляют местоположение, в котором должен быть опущен плужный корпус (например, приближается к границе поля с внешней стороны поля, покидает поворотную полосу или минует заглубленный камень).
Таким образом, шаг плужного корпуса может быть автоматически отрегулирован в заранее определенных местах поля.
В некоторых примерах, приводной механизм 362 может быть предназначен для регулировки угла наклона в продольной плоскости одного плужного корпуса или множества плужных корпусов.
Множество плужных корпусов может быть подмножеством или всеми плужными корпусами на плуге.
Если приводной механизм 362 предназначен для регулировки угла наклона в продольной плоскости одного плужного корпуса, то данные 364 управления, которые обрабатываются для определения соответствующего сигнала 366 управления приводом, могут быть связаны с одним плужным корпусом.
Также, для такого примера, контроллер 360 может обрабатывать данные местоположения плуга, которые представляют местоположение одного плужного корпуса.
Если приводной механизм 362 предназначен для регулировки угла наклона в продольной плоскости множества плужных корпусов, то данные 364 управления, которые обрабатываются для определения соответствующего сигнала 366 управления приводом, могут быть связаны с множеством плужных корпусов.
Например, данные управления могут содержать усредненные данные управления, которые представляют усредненное значение данных управления для множества плужных корпусов.
Например, усредненные данные управления могут содержать усредненные данные вертикальной силы, которые представляют среднее значение силы, направленной вверх или вниз, испытываемой множеством плужных корпусов.
Также, для такого примера, контроллер 360 может обрабатывать данные местоположения плуга, которые представляют среднее местоположение множества плужных корпусов, или местоположение заранее определенного одного из множества плужных корпусов (например, расположенного в центре одного из плужных корпусов).
В некоторых примерах настоящего изобретения плуг может совсем не требовать поддерживающего/опорного колеса.
Это может быть в том случае, когда сила опускания/подъема на плужном корпусе может управляться и регулироваться посредством регулировки угла наклона в продольной плоскости плужного корпуса.
Таким образом, отдельный механизм (например, опорное колесо) может не потребоваться для поддержки плуга над почвой или для регулировки рабочей глубины плужного корпуса.
В таком примере датчик сцепного устройства может предоставлять данные о вертикальной силе.
Более конкретно, датчик сцепного устройства может измерять силу в верхнем звене навесного плуга.
Если датчики глубины связаны с рамой, плуг может «плавать» в почве на правильной глубине.
Предпочтительно, это может привести к передаче нулевой или уменьшенной вертикальной силы на трактор во время работы.
Например, данные управления могут включать в себя данные управления глубиной, которые описаны выше, так что инструкция для изменения глубины плужного корпуса относительно земли может использоваться для регулировки угла наклона в продольной плоскости плужного корпуса.
Контроллер 360 может быть реализован некоторым количеством разных способов.
Например, контроллер может применять математические уравнения к полученным данным 364 контура (и любым другим данным, которые он обрабатывает) для определения сигнала 366 управления приводом.
Альтернативно, контроллер 360 может использовать базу данных или справочную таблицу для определения соответствующего сигнала 366 управления приводом для принятых данных 364 контура земли (и любых других данных, которые он обрабатывает).
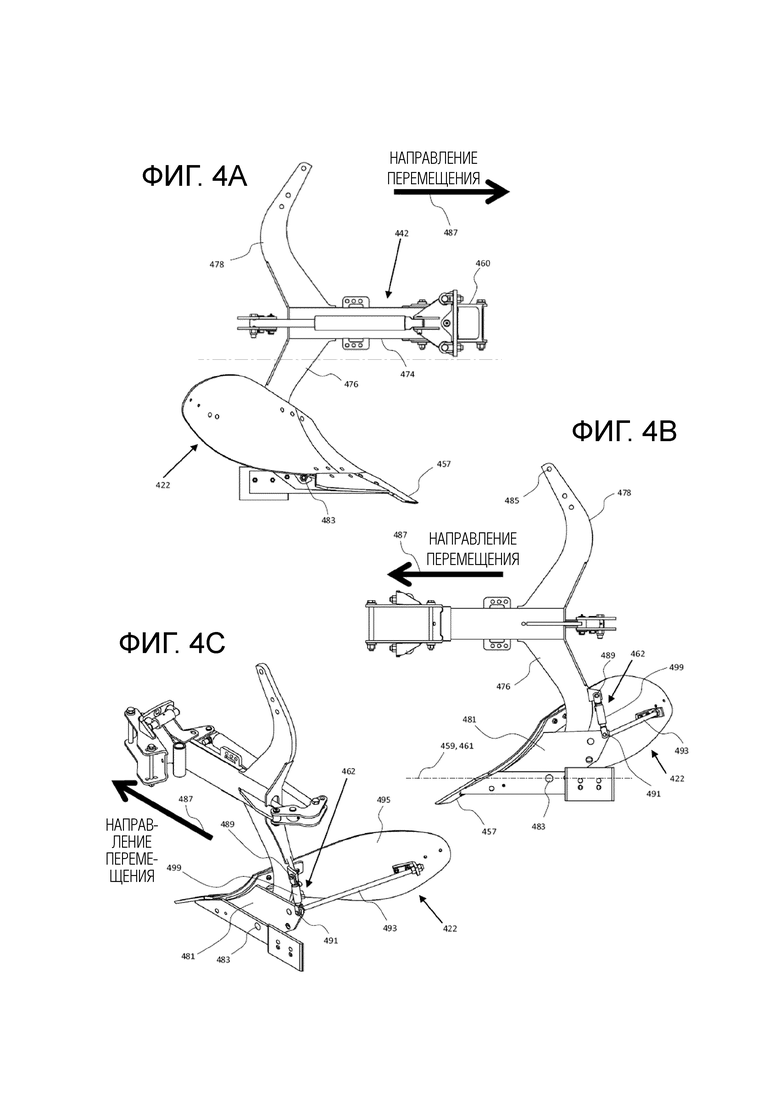
Фигуры 4А, 4В и 4С иллюстрируют часть плуга, которая включает в себя приводной механизм 462 для регулировки угла наклона в продольной плоскости поворотного плужного корпуса 422.
На фигурах 4А, 4В и 4С плужный корпус 422 имеет первый угол наклона в продольной плоскости относительно балки 442.
Фиг.4А показывает вид сбоку с правой стороны плуга относительно направления 487 движения, фиг.4В показывает вид сбоку с левой стороны, а фиг.4С показывает вид в перспективе.
Фигуры 5А, 5В и 5С представляют собой соответствующие виды, которые иллюстрируют плужный корпус 522, имеющий второй угол наклона в продольной плоскости относительно балки 542.
Как будет описано ниже, приводной механизм 562 может регулировать угол наклона в продольной плоскости плужного корпуса 522.
Возвращаясь к фигурам 4А-4С, балка 442 соединяет плужный корпус 422 с рамой (не показана) оборотного плуга.
Эти фигуры показывают корпус 460 балки, который обеспечивает механическое соединение между балкой 442 и рамой.
Балка 442 имеет, по существу, Y-образную структуру, которая включает в себя центральный участок 474, первый рычаг 476 балки и второй рычаг 478 балки.
Центральный участок 474 балки 442 имеет проксимальный конец, который соединен с корпусом 460 балки, и дистальный конец.
Два рычага 476, 478 балки продолжаются от дистального конца балки 442.
Первый рычаг 476 балки соединяет плужный корпус 422 с центральным участком 474 балки 442.
Второй рычаг 478 балки соединяет второй плужный корпус (не показан для ясности иллюстрации) с центральным участком 474 балки 442.
Плужный корпус 422 может использоваться для взаимодействия почвы и обработки поля, когда оборотный плуг находится в первой конфигурации.
Второй плужный корпус (не показан) может использоваться для взаимодействия почвы и обработки поля, когда оборотный плуг находится во второй конфигурации.
В этом примере, плужный корпус 422 включает в себя крестовину 481, которая используется для соединения плужного корпуса 422 с балкой 442.
Более конкретно, стойка башмак 481 соединена с возможностью поворота с первым рычагом 476 балки в точке 483 поворота плужного корпуса, так что плужный корпус 422 может поворачиваться вокруг оси, которая является поперечной к направлению движения плуга, и является также, в целом, горизонтальной.
Таким образом, плужный корпус 422 выполнен с возможностью поворота относительно балки 442, а также поворотным относительно рамы (не показана), поскольку балка 422 может иметь фиксированную ориентацию относительно рамы, когда плужный корпус 422 находится в рабочем положении.
Фиг.4В также показывает местоположение второй точки 485 поворота плужного корпуса на втором рычаге 478 балки, которая представляет местоположение точки поворота для второго поворотного плужного корпуса (не показано).
В этом примере приводной механизм 462 включает в себя цилиндр 499 для регулировки угла наклона в продольной плоскости плужного корпуса 422.
Более конкретно, цилиндр 499 может поворачивать плужный корпус 422 вокруг точки 483 поворота плужного корпуса.
Один конец цилиндра 499 соединен с балкой в точке 489 соединения цилиндра с балкой, в этом примере точка 489 соединения цилиндра с балкой расположена на лапе первого рычага 476 балки.
Другой конец цилиндра 499 соединен с плужным корпусом 422 в точке 491 соединения цилиндра с плужным корпусом, в этом примере точка 491 соединения цилиндра с плужным корпусом расположена на стойке-башмаке 481 плужного корпуса 422.
Когда цилиндр 499 расширяется и сжимается, плужный корпус 422 поворачивается вокруг точки 483 поворота плужного корпуса так, что угол наклона в продольной плоскости плужного корпуса (относительно балки 442) регулируется.
Горизонтальная плоскость, относительно поверхности земли, показана на фиг.4B ссылочной позицией 461.
Плоскость, которая включает в себя продольную ось плужного корпуса, показана на фиг.4В ссылочной позицией 459.
На фигурах 4А-4С, угол наклона в продольной плоскости равен нулю, поскольку угол между горизонтальной плоскостью 461 и продольной осью 459 плужного корпуса 422 равен нулю.
Как будет описано ниже, угол наклона в продольной плоскости может быть увеличен путем поворота плужного корпуса 422 так, что точка 457 плужного корпуса 422 опускается.
Угол наклона в продольной плоскости может быть уменьшен посредством поворота плужного корпуса 422 так, что точка 457 плужного корпуса 422 поднимается.
В этом примере плужный корпус 422 также включает в себя соединительную тягу 493 и отвал 495.
Соединительная тяга 493 обеспечивает жесткое соединение между стойкой-башмаком 481 и дистальным участком отвала 495, так что отвал 495 имеет достаточную опору, когда он перемещается через почву во время операции вспашки.
Стойка-башмак 481, отвал 495 и соединительная тяга 493 поворачиваются вместе как части плужного корпуса 422, когда плужный корпус 422 поворачивается вокруг балки 442.
Фигуры 5А, 5В и 5С показывают виды, соответствующие видам на фигурах 4А, 4В и 4С, которые иллюстрируют плужный корпус 522, имеющий второй угол наклона в продольной плоскости относительно балки 542.
Признакам по фигурам 4A-4C, которые также показаны, по меньшей мере, на одной из фигур 5A-5C, будут присвоены соответствующие ссылочные позиции в серии 500.
Фиг.5В показывает горизонтальную плоскость 561 и продольную ось 559 плужного корпуса 522.
На фигурах 5А-5С угол α наклона в продольной плоскости равен 5°, поскольку угол между горизонтальной плоскостью 561 и продольной осью 559 плужного корпуса 522 составляет 5°.
По сравнению с фигурами 4А-4С, цилиндр 599 был отведен так, что точка 591 соединения цилиндра с плужным корпусом была повернута вокруг точки 583 поворота плужного корпуса в направлении против часовой стрелки, как показано на фиг.5B.
Следовательно, точка 591 соединения цилиндра с плужным корпусом перемещается вверх, точка 557 плужного корпуса 522 перемещается вниз, и угол наклона в продольной плоскости плужного корпуса 522 увеличивается.
Из-за этого увеличенного угла наклона в продольной плоскости, вертикально направленная вниз составляющая реактивной силы на плужном корпусе 522 при его перемещении через почву будет выше для плужного корпуса 522 на фигурах 5А-5С, чем для плужного корпуса на фигурах 4А-4С.
В некоторых примерах механизм автоотвода от камней может использоваться для обеспечения функциональности приводного механизма, который регулирует угол наклона в продольной плоскости плужного корпуса.
Например, такой механизм автоотвода от камней может быть использован для перемещения плужного корпуса с пути камня (или другого подземного препятствия).
Такое перемещение может также включать изменение угла наклона в продольной плоскости плужного корпуса.
В этом случае контроллер, который описан со ссылкой на фиг.3, может подавать сигнал управления приводом механизму автоотвода от камней, так что он устанавливает угол наклона в продольной плоскости плужного корпуса на основе данных управления таким же образом, как описано выше.
Другим примером приводного механизма является пружинный элемент, который регулируется электромагнитной силой.
Еще дополнительным примером приводного механизма является серводвигатель, например, который может поворачивать плужный корпус вокруг точки поворота плужного корпуса.
Фиг.6 иллюстрирует пример варианта осуществления способа работы плуга.
Как описано выше, плуг включает в себя плужный корпус (который может поворачиваться относительно балки и/или рамы плуга) и приводной механизм.
Приводной механизм может регулировать угол наклона в продольной плоскости плужного корпуса.
На этапе 611 способ определяет сигнал управления приводом на основании данных управления.
Многочисленные примеры данных управления описаны выше со ссылкой на фиг.3.
Сигнал управления приводом предназначен для установки угла наклона в продольной плоскости плужного корпуса.
Таким образом, сигнал управления приводом может быть использован для регулировки вертикальной силы (подъема или прижимной силы), испытываемой плужным корпусом при его движении через почву.
На этапе 613 способ обеспечивает сигнал управления приводом приводному механизму.
Таким образом, угол наклона в продольной плоскости плужного корпуса может быть отрегулирован автоматически во время операции вспашки в поле.
Это может предпочтительно использоваться для улучшения операции вспашки; например, с точки зрения эффективности использования топлива и/или консистенции борозд, которые создаются плугом.
Предпочтения и варианты для данного аспекта, признака или параметра изобретения, если в контексте не указано иное, должны рассматриваться как раскрытые в комбинации с любыми и всеми предпочтениями и вариантами для всех других аспектов, признаков и параметров изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2020 |
|
RU2738484C1 |
| Сельскохозяйственное орудие | 2020 |
|
RU2748066C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПАШУЩАЯ СИСТЕМА, СПОСОБ ЕЁ РАБОТЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2020 |
|
RU2742473C1 |
| ПЛУГ, СПОСОБ РАБОТЫ ПЛУГА, РЕАЛИЗУЕМЫЙ С ПОМОЩЬЮ КОМПЬЮТЕРА, И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА. | 2020 |
|
RU2739366C1 |
| СПОСОБ РЕГУЛИРОВКИ ГЛУБИНЫ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2020 |
|
RU2735246C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2748065C1 |
| КРЕПЕЖНЫЙ УЗЕЛ ДЛЯ ПРЕДПЛУЖНИКОВ ПЛУГА | 2020 |
|
RU2748067C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2742914C1 |
| КОМБИНАЦИЯ ИЗ ПОЛУНАВЕСНОГО ОБОРОТНОГО ПЛУГА И УСТРОЙСТВА ДЛЯ ПРЕДПОСЕВНОЙ ПОДГОТОВКИ ПОЧВЫ | 1993 |
|
RU2096938C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |




Группа изобретений относится к сельскому хозяйству. Плуг содержит раму, балку, соединенную с рамой, плужный корпус, соединенный с балкой, приводной механизм и контроллер. Приводной механизм выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса относительно балки. Контроллер выполнен с возможностью определения сигнала управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основании данных управления и обеспечения сигнала управления приводом приводному механизму. Способ обработки почвы плугом, содержащим раму, балку, соединенную с рамой, плужный корпус, соединенный с балкой, приводной механизм, который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса относительно балки. Способ включает этапы, на которых определяют сигнал управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основании данных управления и обеспечивают сигнал управления приводом приводному механизму. Машиночитаемый носитель, содержащий компьютерную программу, выполненную с возможностью осуществления способа обработки почвы плугом, содержащим раму, балку, соединенную с рамой, плужный корпус, соединенный с балкой, приводной механизм, который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса относительно балки. Способ включает этапы, на которых определяют сигнал управления приводом для установки угла наклона в продольной плоскости плужного корпуса на основании данных управления и обеспечивают сигнал управления приводом приводному механизму. Обеспечивается улучшение управления вертикальным усилием на отдельных плужных корпусах для улучшения операции вспашки и топливной эффективности трактора. 3 н. и 12 з.п. ф-лы, 12 ил.
1. Плуг (10), содержащий: раму (12);
балку (442), соединенную с рамой (12);
плужный корпус (422; 522), соединенный с балкой (442);
приводной механизм (362; 462; 562), который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса (422; 522) относительно балки (442); и
контроллер (360), который выполнен с возможностью:
определения сигнала (366) управления приводом для установки угла наклона в продольной плоскости плужного корпуса (422; 522) на основании данных (364) управления; и
обеспечения сигнала (366) управления приводом приводному механизму (362).
2. Плуг (10) по п. 1, в котором плужный корпус (422; 522) выполнен с возможностью поворота вокруг оси, которая является поперечной к направлению перемещения плуга (10).
3. Плуг (10) по п. 1 или 2, в котором данные (364) управления содержат данные о вертикальной силе, которая представляет силу, направленную вверх или вниз, испытываемую плужным корпусом (422; 522) во время его работы в поле.
4. Плуг (10) по п. 3, дополнительно содержащий датчик силы, связанный с плужным корпусом (422; 522), при этом датчик силы выполнен с возможностью обеспечения данных о вертикальной силе.
5. Плуг (10) по п. 3 или 4, дополнительно содержащий датчик взаимодействия колеса с землей, связанный с взаимодействующим с землей колесом плуга, при этом датчик взаимодействия колеса с землей выполнен с возможностью обеспечения данных о вертикальной силе.
6. Плуг (10) по любому из пп. 3-5, дополнительно содержащий:
сцепное устройство для соединения плуга с сельскохозяйственным транспортным средством; и
датчик сцепного устройства, связанный со сцепным устройством, при этом датчик сцепного устройства выполнен с возможностью обеспечения данных о вертикальной силе.
7. Плуг (10) по п. 3, в котором контроллер (360) выполнен с возможностью:
приема сигналов датчика от более чем одного из датчика силы, датчика взаимодействия колеса с землей и датчика сцепного устройства; и
объединения этих сигналов для того, чтобы определять данные о вертикальной силе.
8. Плуг (10) по любому из пп. 1-7, в котором данные (364) управления содержат данные контроля глубины, которые представляют команду для изменения глубины плужного корпуса (422; 522) относительно поверхности земли, на которой работает плуг.
9. Плуг по п. 8, в котором контроллер (360) выполнен с возможностью определения сигнала (366) управления приводом на основании данных контроля глубины для того, чтобы:
увеличить угол наклона в продольной плоскости плужного корпуса (422; 522), если данные контроля глубины представляют команду для увеличения глубины плужного корпуса (422; 522) относительно поверхности земли; и
уменьшить угол наклона в продольной плоскости плужного корпуса (422; 522), если данные контроля глубины представляют команду для уменьшения глубины плужного корпуса (422; 522) относительно поверхности земли.
10. Плуг (10) по любому из пп. 1-9, в котором данные (364) управления содержат данные расположения поля, которые представляют одно или более свойств поля, в котором работает плуг.
11. Плуг по п. 10, в котором данные расположения поля содержат одно или более из:
(i) данных расположения границ поля, которые определяют границы поля, которое должно быть вспахано,
(ii) данных расположения границ поворотной полосы, которые определяют расположение одной или более поворотных полос в поле, которое должно быть вспахано, и
(iii) данных о местоположении препятствий, которые определяют местоположение препятствий в поле.
12. Плуг (10) по любому из пп. 1-11, в котором:
сигнал (366) управления приводом выполнен с возможностью установки угла наклона в продольной плоскости плужного корпуса (422; 522) таким образом, чтобы сила, направленная вверх или вниз, испытываемая плужным корпусом (422; 522), была выше, чем нижнее пороговое значение силы, и/или ниже, чем верхнее пороговое значение силы;
верхнее пороговое значение силы представляет собой максимальную направленную вниз силу на плужном корпусе (422; 522) и/или
нижнее пороговое значение силы представляет собой минимальную направленную вниз силу на плужном корпусе (422; 522) или максимальную направленную вверх силу на плужном корпусе (422; 522).
13. Плуг (10) по любому из пп. 1-12, дополнительно содержащий:
балку (442, 542), соединенную с рамой (12);
причем
плужный корпус (422; 522) соединен с рамой (12) посредством балки (442; 542);
плужный корпус (422; 522) соединен с возможностью поворота с балкой (442; 542); и
приводной механизм выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса (422; 522) путем его поворота относительно балки (442; 542).
14. Способ обработки почвы плугом, содержащим: раму (12);
балку (442), соединенную с рамой (12);
плужный корпус (422, 522), соединенный с балкой (442);
приводной механизм (362; 462; 562), который выполнен с возможностью регулировки угла наклона в продольной плоскости плужного корпуса (422; 522) относительно балки (442);
при этом способ включает этапы, на которых:
определяют сигнал (366) управления приводом для установки угла наклона в продольной плоскости плужного корпуса (422; 522) на основании данных (364) управления; и
обеспечивают сигнал (366) управления приводом приводному механизму (362).
15. Машиночитаемый носитель, содержащий компьютерную программу, выполненную с возможностью осуществления способа по п. 14.
| ЧАЙ "НЕПОЛНИТА-ФИТО" ИЗ ЛЕКАРСТВЕННЫХ РАСТЕНИЙ ДЛЯ СНИЖЕНИЯ ИЗБЫТОЧНОГО ВЕСА | 2003 |
|
RU2259839C2 |
| DE 102015111518 A1, 19.01.2017 | |||
| US 8090507 B2, 03.01.2012 | |||
| ВЕЩЕСТВО ДЛЯ ВОЗМЕЩЕНИЯ ДЕФЕКТОВ КОСТИ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2005 |
|
RU2303436C1 |

