УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к сельскохозяйственному плугу, в частности, но не исключительно, к пашущему орудию. Другой аспект относится к сельскохозяйственным машинам, содержащим пашущее орудие. Другие аспекты относятся к способу регулировки рабочей глубины пашущего орудия.
В сельском хозяйстве соблюдаются фермерские циклы, которые можно условно разделить на различные этапы подготовки земли, посева семян, внесения удобрений, орошения, выращивания сельскохозяйственных культур и сбора урожая. Каждый из этих этапов имеет решающее значение для получения оптимальных результатов урожая и достижения желаемой отдачи от первоначальных инвестиций. Из перечисленных этапов, подготовка почвы обычно дополнительно делится на этапы, при необходимости, очистки препятствий (например, кустарников, камней и булыжников) и последующей обработки почвы.
Обработка почвы крошит и разрыхляет почву, улучшает структуру почвы и вносит растительные остатки и навоз в почву, таким образом, удобряя почву. Улучшенная структура почвы позволяет увеличить рост корней растений, аэрацию почвы и проникновение/фильтрацию воды. В целом, это приводит к повышению урожайности, улучшению долгосрочного плодородия почвы, удержанию влаги в почве и борьбе с сорняками. Обработка почвы может быть разделена на первичную (относительно глубокую) и вторичную (относительно мелкую) обработку почвы. При первичной обработке почвы, такой как вспашка, почва переворачивается так, что питательные вещества выходят на поверхность. В дополнение к обработке почвы для доставки свежих питательных веществ на верхнюю часть и отложению остатков растений ниже, где они будут разрушаться, этот процесс также проветривает землю, позволяя ей удерживать больше влаги. Подготовка почвы на большую глубину приводит к более грубой обработке поверхности, чем вторичная обработка почвы. Вторичная обработка почвы (например, возделывание семян) разбивает комки почвы на меньшие массы, что может быть желательно для небольших семян или растений, которые имеют минимальную способность к переработке комков.
Первичная обработка почвы, и особенно вспашка, широко рассматривается как один из наиболее эффективных способов предотвращения болезней сельскохозяйственных культур, удаления сорняков и борьбы с мышами и другими вредителями. В своей простейшей форме переворотный плуг, также известный как отвальный плуг, включает в себя различные плужные корпуса, которые являются лезвиями для проникновения и переворачивания почвы в рядах соседних канавок, известных как борозды. Современные плуги обычно включают в себя множество плужных корпусов, соединенных с рамой плуга таким образом, что они смещены в боковом направлении друг от друга, когда плуг используется. Каждый плужный корпус соединен с рамой плуга посредством соответствующих балок. Рама плуга, в свою очередь, соединена с буксирующим или толкающим транспортным средством через сцепное устройство, расположенное на переднем или заднем конце рамы.
В зависимости от плотности почвы, рабочая глубина плужных корпусов может быть отрегулирована. Например, рабочая глубина плужного корпуса может быть небольшой в более твердых (плотных) почвах, тогда как более глубокая рабочая глубина может применяться в более мягких (менее плотных) почвах. Плужные корпуса могут быть жестко прикреплены к основной раме, так что их расстояние от основной рамы остается постоянным. Соответственно, рабочая глубина плугов затем регулируется путем изменения расстояния от поверхности земли основной рамы. Если основная рама приближается к поверхности земли, расстояние от поверхности земли, и плужные корпуса проникают глубже в почву. Аналогичным образом, если основная рама поднимается дальше от земли, расстояние от поверхности земли увеличивается, и плужные корпуса вытягиваются из почвы, тем самым, уменьшая рабочую глубину.
Расстояние от поверхности земли основной рамы может регулироваться одним или несколькими колесами глубины. Одно или несколько колес глубины могут быть связаны с любой частью основной рамы, такой как задний конец основной рамы. Регулируемая связь между основной рамой и колесом глубины может быть предусмотрена для обеспечения возможности изменения расстояния между колесом глубины и основной рамой. Во время вспашки, колесо глубины движется по поверхности земли и выдерживает вес плуга. Если расстояние между колесом глубины и основной рамой уменьшается, то соответственно уменьшается расстояние от поверхности земли между основной рамой и поверхностью земли. С другой стороны, если расстояние между колесом глубины и основной рамой увеличивается, расстояние от поверхности земли основной рамы увеличивается. Как указано выше, изменение расстояния от поверхности земли основной рамы приводит к изменению рабочей глубины плужного корпуса.
Большинство современных плугов имеют обратимый тип, в котором основная рама вращается на 180 градусов (то есть переворачивается) относительно сцепки. Поворотный цилиндр, прикрепленный к сцепке, может использоваться для поворота (реверса) плуга. Во время поворота основной рамы, первый набор плужных корпусов, который первоначально был расположен ниже основной рамы (первая конфигурация), переносится в верхнюю часть основной рамы. В то же время, второй набор плужных корпусов, который первоначально был расположен сверху основной рамы, затем перемещается в положение ниже основной рамы. Оборотный плуг тогда находится во второй конфигурации. Основная рама может многократно поворачиваться (переворачиваться) между первой и второй конфигурацией, особенно во время маневров поворота на поворотных полосах. Всякий раз, когда плуг переворачивается, первый и второй набор плужных корпусов меняются местами.
В оборотных плугах, устройство для регулировки рабочей глубины плужных корпусов (т.е. основной рамы) требуется для обеих конфигураций оборотного плуга. Существует в основном два типа колес для контроля глубины для оборотных плугов. Первый тип включает в себя одно вращающееся колесо глубины, которое используется в обеих конфигурациях оборотного плуга. Одно вращающееся колесо глубины должно перемещаться с одной стороны основной рамы на другую во время оборачивания. Эта боковая передача одного колеса глубины может быть достигнута путем поворота последнего с одной стороны на другую. Поворотное движение должно контролироваться/демпфироваться, чтобы избежать чрезмерных ударов, когда колесо поворачивается вниз во время реверсирования плуга.
Второе решение устраняет необходимость перемещения колеса регулировки глубины от одной стороны к другой. Во втором варианте, два отдельных колеса глубины могут быть прикреплены к основной раме. Первое колесо глубины может быть расположено на первой стороне основной рамы, а второе колесо глубины может быть расположено на второй, противоположной стороне основной рамы. Каждое из двух колес затем используется только в одной конфигурации плуга. Это двойное колесное расположение не испытывает динамических ударов, поскольку первое и второе колеса глубины фиксируются на месте во время процедуры реверса. Однако проблемой является то, что это решение «двойное/двойное колесо» накладывает ограничения на максимальный диаметр колес глубины, поскольку большие диаметры могут вызывать соприкосновение колес, особенно когда рабочая глубина плужных корпусов установлена на более глубокие уровни. Тем не менее, как правило, желательно использовать колеса большого диаметра для уменьшения сопротивления качению и уплотнения почвы.
Общей проблемой обоих типов колес глубины, описанных выше, является то, что расстояние от поверхности земли основной рамы уменьшается по мере увеличения рабочей глубины плужных корпусов. Это уменьшение расстояния от поверхности земли может привести к тому, что другие детали, опирающиеся на основную раму, такие как предплужники или сошники, начнут проникать в почву глубже, чем необходимо. Кроме того, уменьшенное расстояние от поверхности земли основной рамы может снизить маневренность пашущего орудия и привести к прилипанию почвы к основной раме, тем самым сокращая срок службы пашущего орудия.
Ввиду вышесказанного, в целом, существует потребность в улучшенных механизмах и способах регулировки глубины пашущих орудий.
Целью настоящего изобретения является решение или по меньшей мере улучшение одной или нескольких проблем предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты и варианты осуществления изобретения обеспечивают пашущее орудие и сельскохозяйственную машину, как заявлено в прилагаемой формуле изобретения.
В первом аспекте настоящего изобретения, предусмотрено пашущее орудие, содержащее основную раму, поддерживающую множество первых взаимодействующих с землей инструментов, при этом пашущее орудие содержит устройство регулировки глубины для перемещения по меньшей мере первого взаимодействующего с землей инструмента из множества первых взаимодействующих с землей инструментов относительно основной рамы для обеспечения регулировки рабочей глубины первого взаимодействующего с землей инструмента.
Перемещение взаимодействующего с землей инструмента относительно основной рамы позволяет основной раме пашущего орудия оставаться неподвижным во время регулировки рабочей глубины. Другими словами, расстояние от поверхности земли основной рамы не требует изменения для увеличения или уменьшения рабочей глубины первого взаимодействующего с землей инструмента. Скорее, сам первый взаимодействующий с землей инструмент активно перемещается (например, вверх и вниз) относительно основной рамы, чтобы непосредственно регулировать рабочую глубину первого взаимодействующего с землей инструмента. Инструмент регулировки глубины способен перемещать первый взаимодействующий с землей инструмент в различные положения, которые относятся к разным рабочим глубинам. Инструмент регулировки глубины может быть способен активно увеличивать и активно уменьшать рабочую глубину первого взаимодействующего с землей инструмента, даже если пашущее орудие является неподвижным. Перемещение первого взаимодействующего с землей инструмента относительно основной рамы может быть реализовано различными способами, некоторые из которых будут обсуждаться более подробно ниже. В некоторых вариантах осуществления, более одного из множества взаимодействующих с землей инструментов могут быть перемещены относительно основной рамы по отдельности или одновременно, как будет описано ниже. Аналогично, также может быть полезно перемещать только один взаимодействующий с землей инструмент из множества первых взаимодействующих с землей инструментов относительно основной рамы. Например, первый плужный корпус сельскохозяйственного плуга может быть выполнен с возможностью перемещения относительно основной рамы для регулировки глубины первой борозды, тогда как остальные плужные корпуса остаются неподвижными относительно основной рамы.
В одном варианте осуществления, устройство регулировки глубины способно перемещать первый и второй взаимодействующий с землей инструмент из множества первых взаимодействующих с землей инструментов относительно основной рамы, так что перемещение первого и второго взаимодействующих с землей инструментов является синхронизированным. Другими словами, устройство регулировки глубины может быть способным перемещать более одного взаимодействующего с землей инструмента относительно основной рамы. В этом примере, одно устройство регулировки глубины может использоваться для перемещения первого и второго взаимодействующих с землей инструментов относительно основной рамы синхронизированным образом. Вместо того чтобы только перемещать два взаимодействующего с землей инструмента, можно также использовать устройство регулировки глубины для синхронного перемещения всего множества первых взаимодействующих с землей инструментов относительно основной рамы. Альтернативно, если пашущее орудие содержит шесть взаимодействующих с землей инструментов, один вариант осуществления может включать в себя три устройства для регулировки глубины, каждое из которых способно синхронизировать перемещение пар взаимодействующих с землей инструментов. Из этого следует, что в этом примере три синхронизированные пары взаимодействующих с землей инструментов перемещаются посредством трех устройств регулировки глубины. Перемещение двух или более взаимодействующих с землей инструментов синхронизированным образом имеет то преимущество, что достигается однородная рабочая глубина для множества первых взаимодействующих с землей инструментов, что обеспечивает более повторяемую подготовку земли.
В еще одном варианте осуществления, пашущее орудие содержит по меньшей мере два устройства регулировки глубины для перемещения первого и второго взаимодействующих с землей инструментов из множества первых взаимодействующих с землей инструментов относительно основной рамы, и при этом два устройства для регулировки глубины могут перемещать первый и второй взаимодействующие с землей инструменты независимо друг от друга. Согласно этому варианту осуществления, каждый из двух или более взаимодействующих с землей инструментов из множества первых взаимодействующих с землей инструментов может независимо перемещается относительно рамы. Первый взаимодействующий с землей инструмент может перемещаться посредством первого устройства для регулировки глубины, а второй взаимодействующий с землей инструмент может перемещаться посредством второго устройства для регулировки глубины. Отсюда следует, что рабочая глубина каждого отдельного взаимодействующего с землей инструмента может регулироваться независимо от остальных взаимодействующих инструментов пашущего орудия. Это может быть особенно полезно в полях с большим количеством маленьких препятствий, которых можно избежать, если индивидуально поднимать некоторые, но не все, из множества первых взаимодействующих с землей инструментов от земли.
Первый взаимодействующий с землей инструмент из множества первых взаимодействующих с землей инструментов может быть прикреплен к основной раме в заданной ориентации относительно поверхности земли, причем устройство регулировки глубины может перемещать первый взаимодействующий с землей инструмент относительно основной рамы без изменения заданной ориентации первого взаимодействующего с землей инструмента. В одном варианте осуществления, первый взаимодействующий с землей инструмент может быть ориентирован параллельно поверхности земли, например, горизонтально на ровном поле. Поддержание ориентации взаимодействующего с землей инструмента относительно поверхности земли является важным фактором в достижении желаемых результатов обработки почвы. В примере плуга, сошники плужных корпусов предназначены для наиболее эффективной работы в определенной ориентации относительно земли. Соответственно, устройство регулировки глубины может быть сконструировано так, чтобы изменять рабочую глубину первого взаимодействующего с землей инструмента без какого-либо изменения ориентации первого взаимодействующего с землей инструмента относительно поверхности земли. В качестве альтернативы, устройство регулировки глубины может быть сконструировано таким образом, что ориентация первого взаимодействующего с землей инструмента может изменяться по мере регулировки рабочей глубины. Другими словами, устройство регулировки глубины может автоматически компенсировать изменения ориентации взаимодействующего с землей инструмента во время регулировки рабочей глубины.
В одном варианте осуществления, устройство регулировки глубины может содержать параллелограммное соединение, в частности четырехзвенное параллелограммное соединение, соединяющее основную раму с первым взаимодействующим с землей инструментом. Устройство регулировки глубины этого варианта осуществления, обеспечивает возможность поворота первого взаимодействующего с землей инструмента в землю и из нее без изменения ориентации взаимодействующего с землей инструмента в процессе работы. В этом варианте осуществления, первый взаимодействующий с землей инструмент может быть подключен к соединителю четырехзвенного параллелограммного соединения.
В других альтернативных вариантах осуществления, устройство регулировки глубины может содержать любое другое соединение, подходящее для перемещения взаимодействующего с землей инструмента (инструментов) относительно основной рамы при сохранении требуемой устойчивости. В одном примере, ножничное соединение может соединять основную раму с первым взаимодействующим с землей инструментом. Ножничное соединение может быть соединено с основной рамой так, что первый взаимодействующий с землей инструмент может подниматься и опускаться в направлении, которое является, по существу, перпендикулярным основной раме.
Устройство регулировки глубины может содержать привод. Привод может быть расположен между основной рамой и первым взаимодействующим с землей инструментом и может быть выполнен с возможностью инициирования перемещение первого взаимодействующего с землей инструмента относительно рамы. Привод может быть гидравлическим приводом, таким как гидравлический цилиндр. Конечно, эквивалентно возможно использование любого другого подходящего привода, такого как электрический или пневматический приводы.
В другом варианте осуществления, устройство регулировки глубины содержит два привода, в частности два гидравлических цилиндра, первый привод для регулировки рабочей глубины первого взаимодействующего с землей инструмента и второй привод для регулировки ориентации первого взаимодействующего с землей инструмента. Устройство регулировки глубины этого варианта осуществления может быть выполнено с возможностью синхронизации перемещения первого и второго приводов так, что ориентация первого взаимодействующего с землей инструмента остается постоянной, когда первый взаимодействующий с землей инструмент перемещается в землю и из нее посредством первого привода. В одном примере, первый привод может вызывать поворотное движение первого взаимодействующего с землей инструмента относительно основной рамы, что, в зависимости от соединения между основной рамой и первым взаимодействующим с землей инструментом, может вызывать изменение ориентации первого взаимодействующего с землей инструмента. Следовательно, второй привод может быть синхронизирован с движением первого привода, так что второй привод компенсирует изменение ориентации первого взаимодействующего с землей инструмента, вызванное поворотным движением.
В еще одном варианте осуществления, пашущее орудие содержит блок управления для управления устройством регулировки глубины, при этом блок управления сконфигурирован для уменьшения рабочей глубины первого взаимодействующего с землей инструмента из множества первых взаимодействующих с землей инструментов, если столкновение с препятствием встречается и/или является предсказуемым. Согласно этому варианту осуществления, устройство регулировки глубины используется в качестве так называемого проходителя камней и, следовательно, может заменять другие механизмы прохождения камней, которые обычно предусмотрены на пашущем орудии. Блок управления может быть выполнен с возможностью вытягивания первого взаимодействующего с землей инструмента из земли, если встречается препятствие, такое как булыжник или камень, и/или прогнозируется, чтобы избежать повреждения первого взаимодействующего с землей инструмента. Этот конкретный вариант осуществления относится к активному управлению устройством регулировки глубины в ответ на столкновения с препятствиями или его прогнозирования. В качестве альтернативы, устройство регулировки глубины также может быть настроено как пассивное прохождение камня, и в этом случае устройство регулировки глубины работает как демпфер, если встречается препятствие. Блок управления не обязательно требуется для пассивной конструкции устройства регулировки глубины.
Пашущее орудие может содержать датчик препятствия для идентификации препятствий в почве, причем датчик препятствия расположен перед первым взаимодействующим с землей инструментом в направлении движения. Датчик препятствия может быть полезен в сочетании с активными функциями прохождения камня устройства регулировки глубины. Это связано с тем, что датчик препятствия может использоваться для прогнозирования столкновений с препятствиями одного или нескольких первых взаимодействующих с землей инструментов во время работы пашущего орудия. Например, датчик препятствия может быть способен идентифицировать размер и положение препятствия и передавать эту информацию обратно в блок управления в виде данных о препятствии. Блок управления может использовать данные о препятствии для идентификации взаимодействующего с землей инструмента или инструментов, которые, по прогнозам, столкнутся с препятствием (препятствиями), идентифицированным датчиком препятствия. Блок управления может затем активировать привод для перемещения соответствующих взаимодействующих с землей инструментов из почвы непосредственно перед столкновением. Как только пашущее орудие преодолело препятствие, блок управления может затем активировать привод устройства регулировки глубины, чтобы опустить соответствующие взаимодействующие с землей инструменты обратно в землю.
В еще одном варианте осуществления, основная рама поддерживает множество вторых взаимодействующих с землей инструментов и является переводимой между первой конфигурацией, в которой множество первых взаимодействующих с землей инструментов находятся в рабочем положении, и второй конфигурацией, в которой множество вторых взаимодействующих с землей инструментов находятся в рабочем положении, при этом пашущее орудие содержит устройство регулировки глубины для перемещения первого взаимодействующего с землей инструмента из множества вторых взаимодействующих с землей инструментов относительно основной рамы для обеспечения регулировки рабочей глубины первого взаимодействующего с землей инструмента из множества вторых взаимодействующих с землей инструментов. Другими словами, пашущее орудие может иметь множество первых и вторых взаимодействующих с землей инструментов по обе стороны от основной рамы. В одном примере пашущее орудие согласно этому варианту осуществления может представлять собой оборотный плуг с множеством первых плужных корпусов на первой стороне основной рамы и множеством вторых плужных корпусов на второй стороне основной рамы. Конечно, в зависимости от текущей конфигурации основной рамы, необходима настройка либо множества первых взаимодействующих с землей инструментов, либо множества второго взаимодействующего с землей инструмента. Чтобы отрегулировать первый взаимодействующий с землей инструмент из множества вторых взаимодействующих с землей инструментов (например, во второй конфигурации основной рамы), может быть предусмотрено устройство регулировки глубины, аналогичное устройству регулировки глубины, рассмотренному выше. Устройство регулировки глубины для первого взаимодействующего с землей инструмента, из множества вторых взаимодействующих с землей инструментов, может быть таким же, как устройство для регулировки глубины первого взаимодействующего с землей инструмента из множества первых взаимодействующих с землей инструментов. Другими словами, одно устройство регулировки глубины может изменять рабочую глубину по меньшей мере одного взаимодействующего с землей инструмента с любой стороны основной рамы. Альтернативно, взаимодействующий с землей инструмент на любой стороне основной рамы могут быть отрегулированы отдельным устройством регулировки глубины. То есть, первое устройство регулировки глубины может быть предусмотрено для первого взаимодействующего с землей инструмента из множества первых взаимодействующих с землей инструментов, а второе устройство для регулировки глубины может быть предусмотрено для первого взаимодействующего с землей инструмента из множества вторых взаимодействующих с землей инструментов. Этот вариант осуществления позволяет индивидуально регулировать взаимодействующие с землей инструменты по обе стороны от основной рамы, что может быть особенно полезно в ожидании неровных грунтов для следующего прогона после переворота плуга.
Первый взаимодействующий с землей инструмент, из множества первых взаимодействующих с землей инструментов, может перемещаться независимо от первого взаимодействующего с землей инструмента из второго множества взаимодействующих с землей инструментов.
В другом варианте осуществления, механизм регулировки глубины способен перемещать первый взаимодействующий с землей инструмент между первым положением, в котором установлена минимальная рабочая глубина, и вторым положением, в котором установлена максимальная рабочая глубина, при этом пашущее орудие содержит первый упор для блокировки первого взаимодействующего с землей инструмента в его первом положении, и/или орудие для зацепления с землей содержит второй упор для блокировки первого взаимодействующего с землей инструмента в его втором положении. Другими словами, первый взаимодействующий с землей инструмент может быть заблокирован в своих положениях максимальной и/или минимальной рабочей глубины. Это может уменьшить непреднамеренные вибрации во время использования пашущего орудия. Конечно, также возможно заблокировать первый взаимодействующий с землей инструмент в любом положении между его первым и вторым положением.
В другом варианте осуществления по меньшей мере один взаимодействующий с землей инструмент представляет собой плужный корпус. В качестве альтернативы по меньшей мере один взаимодействующий с землей инструмент может быть предплужником.
Пашущее орудие может быть оборотным плугом.
В другом аспекте настоящего изобретения, предусмотрена сельскохозяйственная техника, включающая сельскохозяйственное транспортное средство, такое как трактор, и любой вариант осуществления пашущего орудия, описанный выше, в котором пашущее орудие соединено с передней или задней частью сельскохозяйственного транспортного средства.
Сельскохозяйственное транспортное средство или трактор может включать одно или несколько устройств управления, например, но, не ограничиваясь, программируемые или не программируемые процессоры. Аналогичным образом, пашущее орудие может включать в себя одно или несколько устройств управления, например, но, не ограничиваясь, программируемые или не программируемые процессоры. Дополнительно или в качестве альтернативы, пашущее орудие может управляться одним или несколькими устройствами управления сельскохозяйственного транспортного средства. Аналогичным образом, сельскохозяйственное транспортное средство может управляться одним или несколькими устройствами управления пашущего орудия.
Сельскохозяйственное транспортное средство и/или пашущее орудие могут управляться дистанционно, например, из офиса фермы. Соответственно, сельскохозяйственное транспортное средство может включать в себя один или несколько интерфейсов связи для соединения к удаленному процессору и/или пульту дистанционного управления. Аналогичным образом, пашущее орудие может включать в себя один или несколько интерфейсов связи для соединения к удаленному процессору и/или пульту дистанционного управления.
Согласно другому аспекту настоящего изобретения, предусмотрен способ регулировки рабочей глубины пашущего орудия с основной рамой и по меньшей мере одним взаимодействующим с землей инструментом, причем взаимодействующий с землей инструмент является подвижным относительно основной рамы для регулировки рабочей глубины взаимодействующего с землей инструмента. Способ включает этапы, на которых:
обнаруживают наличие препятствия на пути взаимодействующего с землей инструмента пашущего орудия; и
уменьшают рабочую глубину взаимодействующего с землей инструмента.
Обнаружение препятствия может быть выполнено либо заранее посредством датчика препятствия, такого как датчик камня, либо повторно, когда взаимодействующий с землей инструмент сталкивается с препятствием. Отсюда следует, что регулировка рабочей глубины может выполняться заблаговременно, чтобы избежать столкновения, и в качестве ответной меры как способ контроля повреждений.
В пределах объема этой заявки, явно предполагается, что могут быть приняты различные аспекты, варианты осуществления, примеры и альтернативы, изложенные в предыдущих абзацах, а также формула изобретения и/или последующее описание и чертежи, и, в частности, их отдельные признаки, самостоятельно или в любой комбинации. То есть все варианты осуществления и все признаки любого варианта осуществления могут комбинироваться любым способом и/или комбинацией, если только такие признаки не являются несовместимыми. Заявитель оставляет за собой право изменить любую первоначально поданную заявку или подать любую новую заявку соответствующим образом, включая право вносить изменения в любую первоначально поданную заявку, чтобы она зависела от и/или учитывала любую особенность любой другой заявки, хотя она первоначально не была заявлена таким образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее будут описаны, только в качестве примера, со ссылкой на прилагаемые чертежи один или несколько вариантов осуществления настоящего изобретения, на которых:
Фиг.1А показывает вид справа пашущего орудия с фиксированными взаимодействующими с землей инструментами;
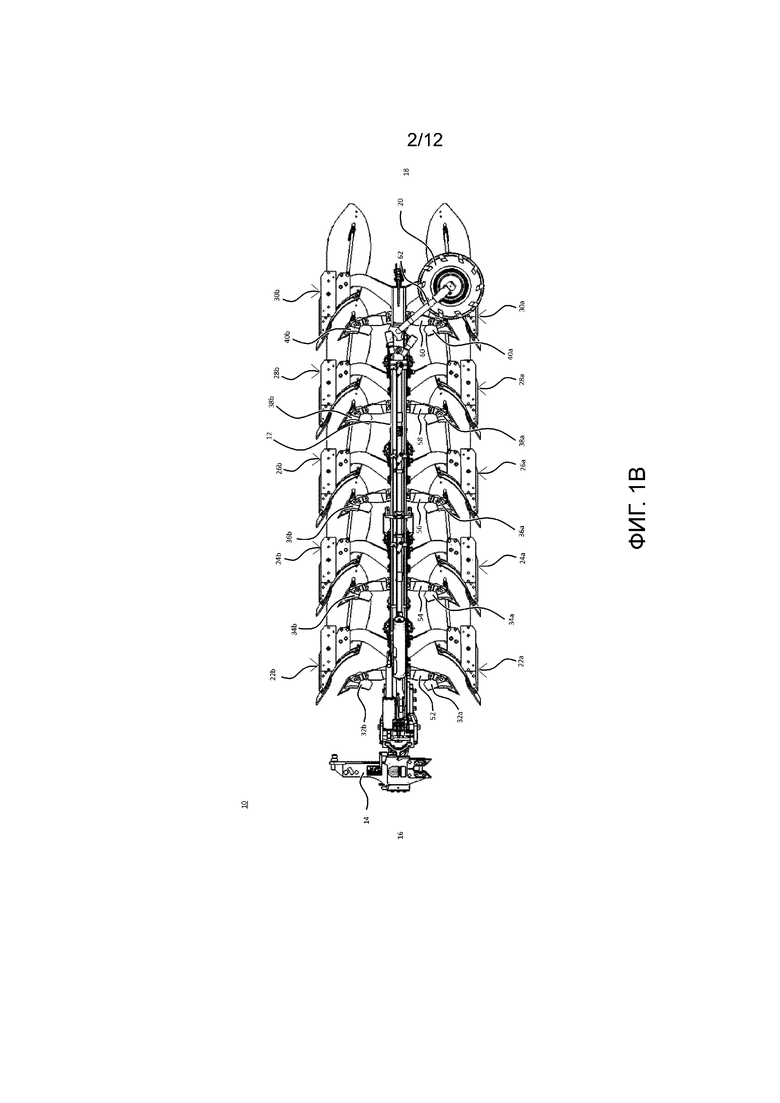
Фиг.1В показывает вид слева пашущего орудия, показанного на фиг.1А;
Фиг.1С показывает вид в плане пашущего орудия, показанного фиг.1А;
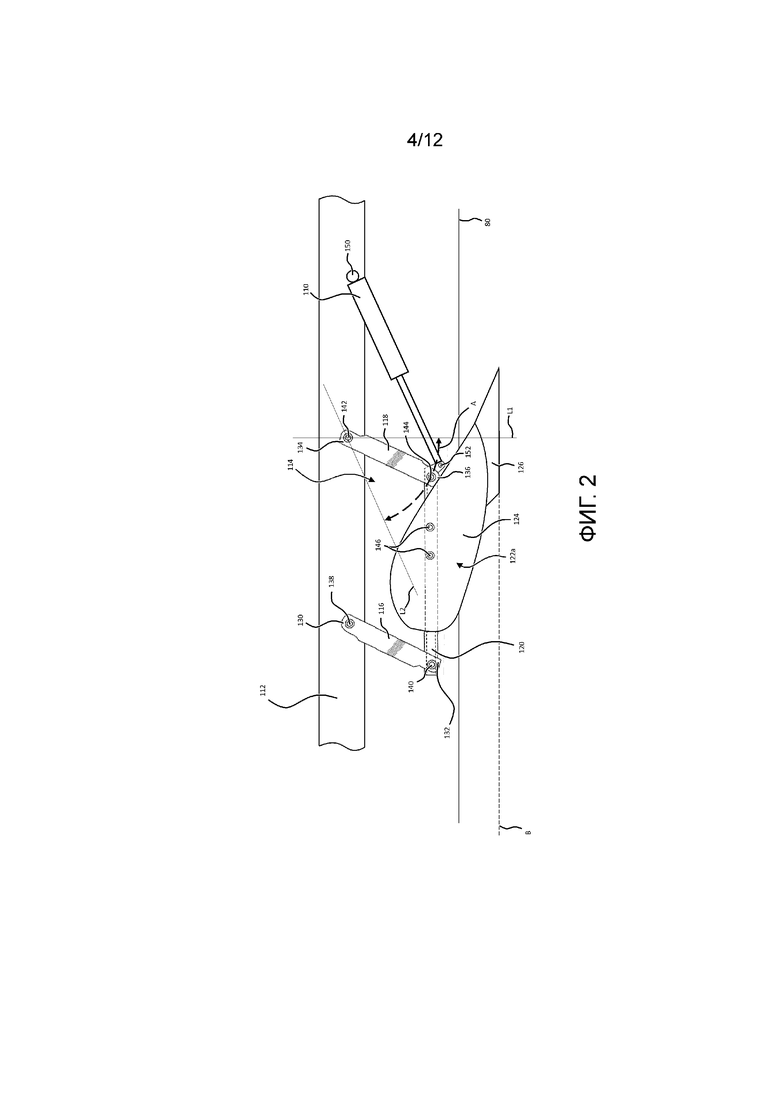
Фиг.2 показывает схематичное представление взаимодействующего с землей инструмента, соединенного с основной рамой пашущего орудия посредством шарнирного четырехугольника;
Фиг.3 показывает схематичное представление двух взаимодействующих с землей инструментов, соединенных с основной рамой пашущего орудия синхронизированным способом;
Фиг.4 показывает схематичное представление взаимодействующего с землей инструмента, соединенного с основной рамой пашущего орудия посредством шарнирного четырехугольника;
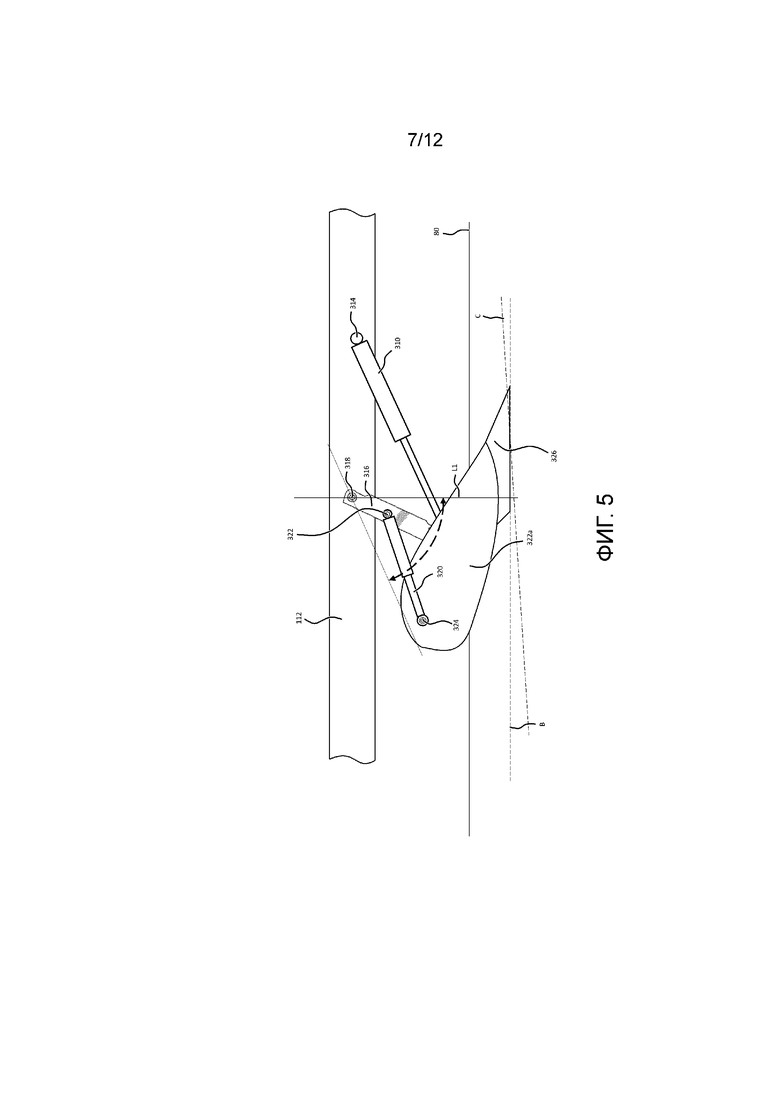
Фиг.5 показывает схематичное представление взаимодействующего с землей инструмента, соединенного с основной рамой пашущего орудия, с двумя отдельными приводами;
Фиг.6 показывает схематичное представление взаимодействующего с землей инструмента, соединенного с основной рамой пашущего орудия, с механизмом скольжения;
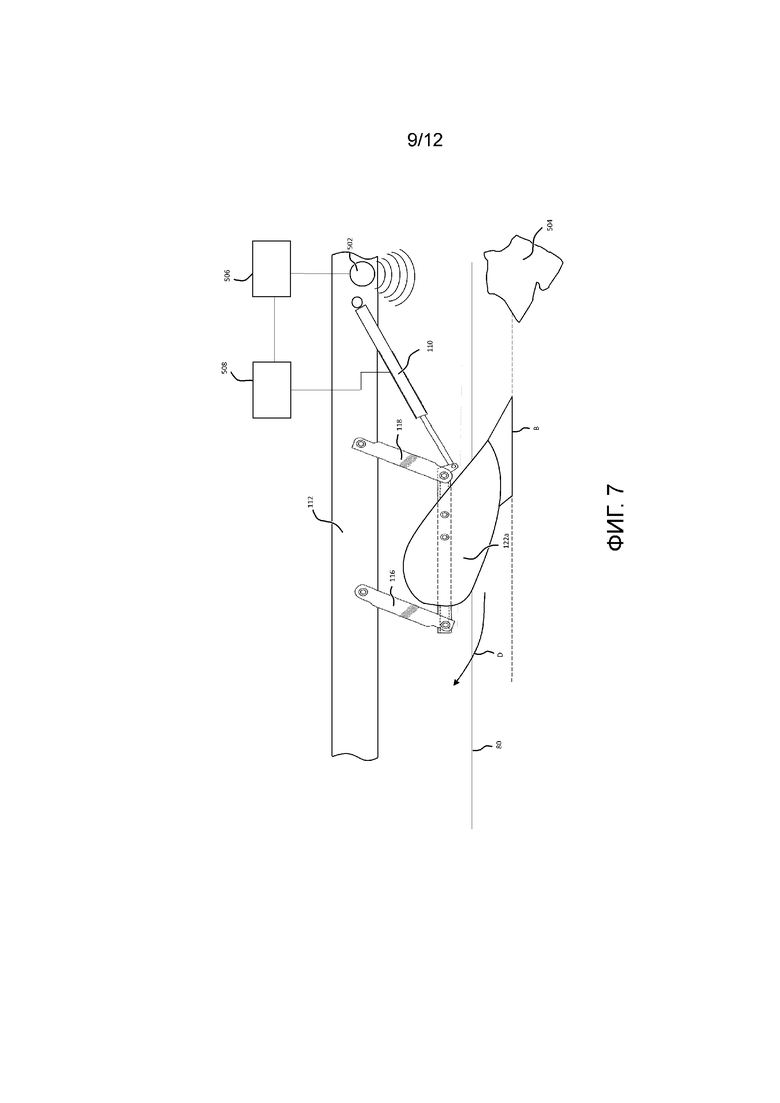
Фиг.7 показывает схематичное представление части пашущего орудия, содержащего датчик препятствия;
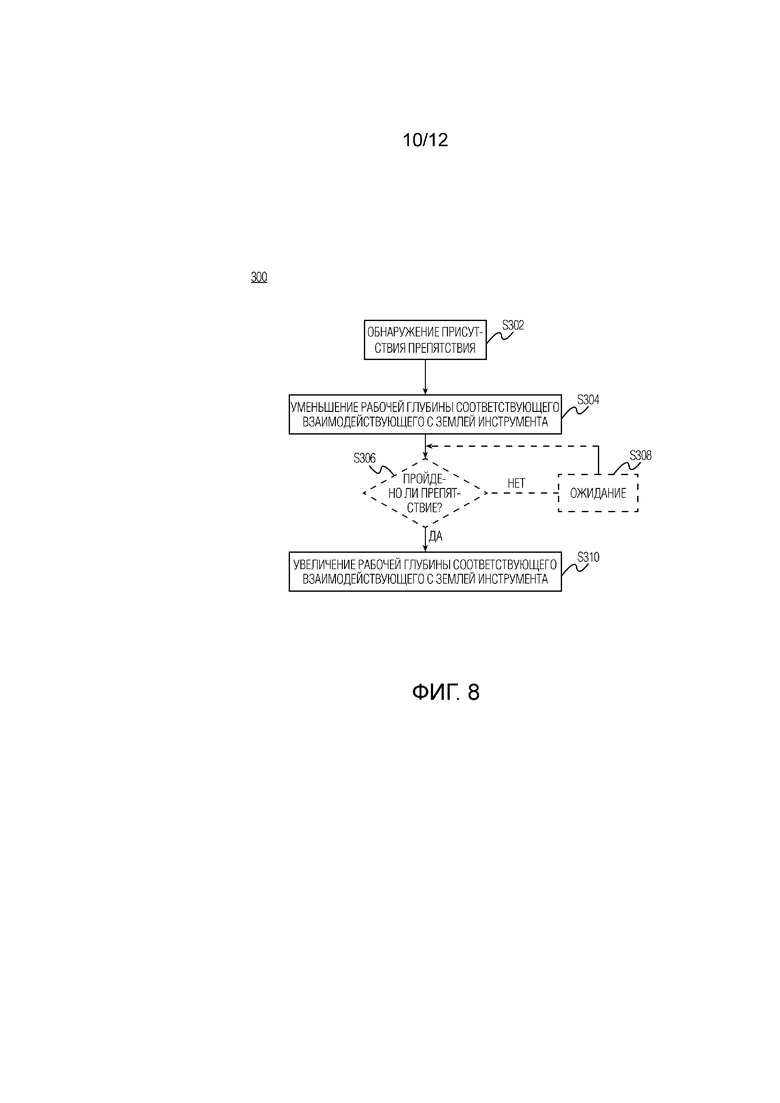
Фиг.8 показывает блок-схему способа регулировки рабочей глубины пашущего орудия;
Фиг.9 показывает схематичное представление траектории движения сельскохозяйственной техники в рабочей зоне;
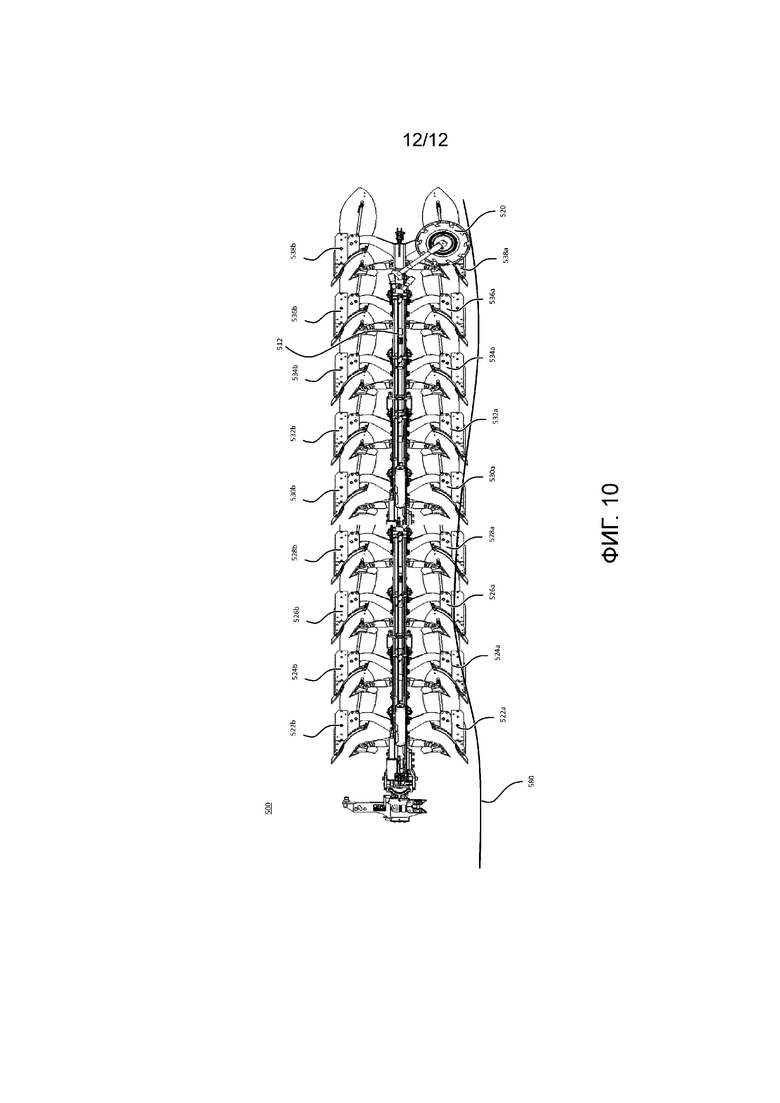
Фиг.10 показывает пашущее орудие, которое движется по неровной поверхности земли.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигуры 1А-1С показывают различные виды пашущего орудия, в частности, плуга 10. Как будет описано более подробно ниже, плуг 10, показанный на фигурах 1А-1С, является оборотным плугом.
Плуг 10 содержит основную раму 12. Основная рама 12 может представлять собой прямоугольную или круглую трубу, продолжающуюся между передней сцепкой 14 на переднем конце 16 плуга по направлению к колесу 20 орудия на заднем конце 18 плуга. Основная рама 12 поддерживает множество взаимодействующих с землей инструментов.
В примере на фигурах 1А-1С взаимодействующие с землей инструменты включают в себя плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28а, 28b, 30а, 30b и предплужники 32а, 32b, 34а, 34b, 36а, 36b, 38а, 38б, 40а, 40b плуга. Множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а, 30а и предплужники 32а, 34а, 36а, 38а и 40а плуга, расположены на первой стороне основной рамы 12. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество первых взаимодействующих с землей инструментов расположены ниже основной рамы 12.
Множество вторых взаимодействующих с землей инструментов, то есть плужных корпусов 22b, 24b, 26b, 28b, 30b и предплужников 32b, 34b, 36b, 38b и 40b плуга, расположены на второй стороне основной рамы 12, напротив множества первых взаимодействующих с землей инструментов. В первой конфигурации основной рамы 12, иллюстрированной на фигурах 1А-1С, множество вторых взаимодействующих с землей инструментов расположены выше основной рамы.
Каждый из плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b соединен с основной рамой 12 посредством балок 42, 44, 46, 48, 50. Каждая из балок 42, 44, 46, 48, 50 имеет, по существу, Y-образную структуру.
Первая балка 42 поддерживает первую пару плужных корпусов 22a, 22b. Вторая балка 44 поддерживает вторую пару плужных корпусов 24a, 24b. Третья балка 46 поддерживает третью пару плужных корпусов 26a, 26. Четвертая балка 48 поддерживает четвертую пару плужных корпусов 28a, 28b. Пятая балка 50 поддерживает пятую пару плужных корпусов 30a, 30b.
Каждая из пар плужных корпусов 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b предназначена для создания борозды в поле, когда плуг тянется позади или толкается сельскохозяйственным транспортным средством, таким как трактор. Из этого следует, что каждый проход иллюстрированного плуга 10 через поле создает пять смежных борозд.
Обращаясь к фиг.9, описана типичная работа сельскохозяйственной машины, содержащей трактор 7 и плуг 10. При использовании, плуг 10 тянется как прицеп (орудие) позади сельскохозяйственного буксировочного транспортного средства (например, трактора 7). Понятно, что эквивалентно возможно расположить плуг 10 перед или как перед, так позади трактора 7.
Фиг.9 показывает схему рабочей зоны 1, например, поля культуры, которое разделено на основное поле 3 и поворотные полосы 5, 6. Трактор 7 тянет плуг 10 по основному полю 3, в целом, параллельными рабочими рядами. Рабочие ряды являются частью траектории 8 трактора 7 и обычно проходят параллельно с длинным краем рабочей зоны 1. Каждый рабочий ряд представляет отдельный проход сельскохозяйственной машины по полю между поворотными полосами 5 и 6. Как будет более подробно описано ниже, пяти бороздовой плуг, такой как примерный плуг, показанный на фигурах 1А-1С, создает в общей сложности пять борозд за один проход.
В конце каждого прохода/рабочего ряда, трактор 7 и плуг 10 используют приближающуюся поворотную полосу 5 или 6 для разворота, как показано траекторией 8. В данной области техники известно, что почва поворотных полос 5, 6 подвержена более высоким уровням уплотнения почвы, поскольку она получает больше нагрузки на единицу площади, чем основное поле 3. Известно, что для того, чтобы не нарушать почву на поворотных полосах 5, 6 больше, чем это необходимо, необходимо поднять взаимодействующие с землей инструменты, такие как плужные корпуса и предплужники, от земли в поворотной полосе, или транспортное положение непосредственно перед достижением плугом 10 поворотной полосы 5 или 6, соответственно. После того, как трактор 7 и соответствующий плуг 10 повернули на поворотную полосу 5, 6, взаимодействующие с землей инструменты плуга 10 снова опускаются в рабочее положение, чтобы взаимодействовать с почвой основного поля 3.
На иллюстрации фиг.9, плуг 10 работает на основном поле 3 и, следовательно, расположен в рабочем положении. Когда плуг 10 достигает границы между поворотной полосой 5/6 и основным полем 3, плуг 10 переводится в поворотное/транспортное положение. Отсюда следует, что каждый рабочий ряд начинается с регулировки плуга из транспортного положения в рабочее положение и заканчивается регулировкой плуга из рабочего положения в транспортное положение.
Плуг 10, показанный на фигурах 1А-1С, является полностью установленным. В полностью установленных плугах, вес плуга переносится исключительно трактором, когда плуг находится в своем транспортном положении (на поворотной полосе). Другими словами, плуг затем поддерживается исключительно трактором 7 через сцепку 14 и может подниматься над землей подъемным цилиндром рычажной передачи трактора.
Во время поворотного движения на поворотных полосах, плуг 10 также переворачивается. То есть основная рама 12 поворачивается на 180 градусов относительно сцепки 14 для перемещения плуга из первой конфигурации во вторую конфигурацию. В своей первой конфигурации, показанной на фигурах 1А-1С, плуг 10 настроен так, что множество первых взаимодействующих с землей инструментов, то есть плужные корпуса 22а, 24а, 26а, 28а и 30а и предплужники 32а, 34а, 36а, 38а, 40а каждой из пар находится в контакте с почвой. Эта первая конфигурация показана на фиг.9 и иногда также называется «левосторонней конфигурацией», поскольку большинство плужных корпусов расположены слева от трактора 7. Во второй конфигурации (не показана) плуг 10 настроен так, что множество вторых взаимодействующих с землей инструментов, то есть плужные корпуса 22b, 24b, 26b, 28b, 30b и предплужники 32b, 34b, 36b, 38b, 40b, находятся в контакте с почвой. Эта вторая конфигурация достигается после поворота основной рамы на 180 градусов, так что большинство плужных корпусов затем располагаются справа от трактора (не показано). Поэтому вторую конфигурацию также иногда называют «правосторонней конфигурацией».
Обработка поля плугом 10 в этой первой конфигурации обеспечивает первую борозду, созданную первым плужным корпусом 22а, вторую борозду, созданную вторым плужным корпусом 24а, третью борозду, созданную третьим плужным корпусом 26а, четвертую борозду, созданную четвертым плужным корпусом 28а и пятую борозду, созданную пятым плужным корпусом 30а. Ширина борозды определяется поперечным расстоянием d между плужными корпусами 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b, как иллюстрировано на фиг.1C.
Когда оборотный плуг 10 достигает конца первого прохода, основная рама 12 поворачивается на 180 градусов (переворачивается) относительно сцепки 14. Поворотный цилиндр (не показан), прикрепленный к сцепке 14, может использоваться для поворота (переворота) плуга 10. Во время поворота основной рамы, первое множество плужных корпусов, например, 22а, 24а, 26а, 28а, 30а, переносятся на верхнюю часть плуга 10. В то же время, второе множество плужных корпусов, например, 22b, 24b, 26b, 28b, 30b, которые не использовались в предыдущем проходе, затем переносятся на нижний конец плуга 10 и будут погружаться в почву во время следующего прохода. Оборотный плуг затем находится во второй конфигурации (не показана).
Выполнение второго прохода поля плугом 10 в этой второй конфигурации обеспечивает первую борозду, созданную шестым плужным корпусом 22b, вторую борозду, созданную седьмым плужным корпусом 24b, третью борозду, созданную восьмым плужным корпусом 26b, четвертую борозду, созданную девятым плужным корпусом 28b, и пятую борозду, созданную десятым плужным корпусом 30b.
Оборотный плуг 10 между последовательными проходами имеет то преимущество, что плужные корпуса 22а, 22b, 24а, 24b, 26а, 26b, 28а, 28b, 30а, 30b, которые зацепляются с почвой, всегда обращены к одному и тому же боковому краю основного поля 3, независимо от ориентации трактора.
В обеих конфигурациях плуга 10, основная рама 12 поддерживается колесом 20 орудия. Колесо 20 орудия расположено на заднем конце 18 плуга 10. Поскольку плужные корпуса 22a, 22b, 24a, 24b, 26a, 26b, 28a, 28b, 30a, 30b и предплужники 32a, 32b, 34a, 34b, 36a, 36b, 38a, 38b, 40a, 40b обычно прикреплены к основной раме через балки 42, 44, 46, 48 и 50, это не позволяет регулировать рабочую глубину упомянутых взаимодействующих с землей инструментов, не изменяя расстояние от поверхности земли основной рамы 12. Для этого плуг 10, показанный на фигурах 1А-1С, включает в себя колесо 20 орудия, которое действует как колесо глубины для регулировки расстояния от поверхности земли основной рамы 12. Соединение, предусмотренное между колесом 20 орудия и основной рамой 12, позволяет оператору поднимать или опускать основную раму 12 относительно поверхности 80 земли. Поскольку положение множества первого и второго взаимодействующих с землей инструментов фиксировано относительно основной рамы 12, любое изменение расстояния от поверхности земли основной рамы также будет влиять на рабочую глубину множества первого и второго взаимодействующих с землей инструментов. В частности, если основная рама 12 опускается путем регулировки связи между колесом 20 орудия и основной рамой 12, то рабочая глубина множества первых взаимодействующих с землей инструментов, показанных на фигурах 1А-1С, увеличивается, то есть множество первых взаимодействующих с землей инструментов опускаются дополнительно в почву. Если, с другой стороны, основная рама 12 поднимается, то рабочая глубина множества первых взаимодействующих с землей инструментов уменьшается, т.е. множество первых взаимодействующих с землей инструментов извлекаются из почвы.
Обращаясь к фиг.2, показан альтернативный способ изменения рабочей глубины взаимодействующих с землей инструментов согласно варианту осуществления настоящего изобретения. Фиг.2 представляет собой схематичное представление соединения между основной рамой 112 и первым взаимодействующими с землей инструментом 122а. Следует понимать, что пашущее орудие по настоящему раскрытию может иметь множество первых взаимодействующих с землей инструментов и множество вторых взаимодействующих с землей инструментов, аналогично плугу 10, показанному на фигурах 1А-1С. Фиг.2 показывает только соединение между основной рамой 112 и одним из множества первых взаимодействующих с землей инструментов. Первый взаимодействующий с землей инструмент 122а представляет собой плужный корпус, содержащий отвал 124 плуга и сошник 126. Первый взаимодействующий с землей инструмент 122а соединен с основной рамой 112 через шарнирный четырехугольник 114. Шарнирный четырехугольник 114 является параллелограммным соединением. Шарнирный четырехугольник 114 включает в себя основание, которое представлено основной рамой 112, первой поворотной тягой 116, второй поворотной тягой 118 и соединительной тягой 120. Первая поворотная тяга 116 шарнирно соединена с основной рамой 112 на первом конце 130 и шарнирно соединена с соединительной тягой 120 на противоположном втором конце 132. Вторая поворотная тяга соединена с основной рамой на первом конце 134 и соединена с соединительной тягой 120 на противоположном втором конце 136.
Первая поворотная тяга 116 соединена с основной рамой 112 на своем первом конце 130 через ось 138 поворота. На ее противоположном втором конце 132, первая поворотная тяга 116 соединена с соединительной тягой 120 через ось 140 поворота. Вторая поворотная тяга 118 соединена с основной рамой 112 на своем первом конце 134 через ось 142 поворота. На ее противоположном, втором конце 136, вторая поворотная тяга 118 соединена с соединительной тягой 120 через ось 144 поворота.
Поворотные тяги 116 и 118 имеют одинаковую длину, то есть расстояние между осями 138 и 140 поворота первой поворотной тяги 116 идентично расстоянию между осями 142 и 140 поворота второй поворотной тяги 118.
Расстояние между первой осью 138 поворота первой поворотной тяги 116 и первой осью 142 поворота второй поворотной тяги 118 является идентичным расстоянию между второй осью 140 поворота первой поворотной тяги 116 и второй осью 144 поворота второй поворотной тяги 118. Первая и вторая поворотные тяги 116, 118 расположены параллельно друг другу. Соединительная тяга 120 и основание (представленные частью основной рамы 112 между осями 138 и 142 поворота) расположены параллельно.
Первый взаимодействующий с землей инструмент 122а (плужный корпус) соединен с соединительной тягой 120. В этом примере, первый взаимодействующий с землей инструмент 122а может быть разъемно соединен с соединительной тягой 120 через элементы 146 крепления. Конечно, любой другой способ крепления также может быть осуществимым для соединения первого взаимодействующего с землей инструмента 122а с соединительной тягой 120.
Должно быть понятно, что всякий раз, когда шарнирный четырехугольник 114 перемещается, первая и вторая поворотные тяги 116, 118 остаются параллельными. Аналогично, соединительная тяга 120 всегда будет оставаться параллельной основному брусу, то есть основной раме 112, во время движения. Диапазон перемещения схематично показан на фиг.2 стрелкой А. Стрелка А показывает возможную траекторию второй оси 144 поворота во время перемещения шарнирного четырехугольника 114. Конечно, вторая ось 140 поворота первой поворотной тяги 116 имеет соответствующий диапазон перемещения. Ось 144 поворота может перемещаться между первым конечным положением, обозначенным линией L1, и вторым конечным положением, обозначенным линией L2. Как ось 144 поворота перемещается между ее первым конечным положением и вторым конечным положением вдоль стрелки A, так же как и ось 140 поворота первой поворотной тяги 116. Следовательно, соединительная тяга 120 будет подвергаться тому же движению. Из этого следует, что в первом конечном положении второй поворотной тяги 118, обозначенном линией L1, соединительная тяга 120 находится в своей нижней точке, то есть на максимальном расстоянии от основной рамы 112. Во втором конечном положении второй поворотной тяги 118, обозначенном линией L2, соединительная тяга 120 находится в своей верхней точке, то есть самой близкой к основной раме 112. Соответственно, рабочая глубина взаимодействующего с землей инструмента 122а, который соединен с соединительной тягой 120, изменяется по мере того, как первая и вторая поворотные тяги 116, 118 поворачиваются вокруг своих соответствующих первых осей 138, 142 поворота. Соответственно, первый взаимодействующий с землей инструмент 122а также перемещается между первым положением, в котором установлена максимальная рабочая глубина, то есть когда вторая поворотная тяга 118 совмещена с линией L1, и вторым положением, в котором установлена минимальная рабочая глубина, т.е. когда вторая поворотная тяга 118 совмещена с линией L2. Из этого следует, что рабочая глубина первого взаимодействующего с землей инструмента 122а, показанного в варианте осуществления на фиг.2, регулируется индивидуально, независимо от расстояния до поверхности земли основной рамы 112. Соответственно, может не быть необходимости в регулируемом колесе орудия (колесе глубины) с пашущим орудием согласно настоящему раскрытию. Скорее, расстояние между колесом орудия и основной рамой может быть фиксированным, так что расстояние от поверхности земли основной рамы 112 остается стабильным.
Разумеется, другие взаимодействующие с землей инструменты могут быть соединены с основной рамой так же или аналогично первому взаимодействующему с землей инструменту 122а. Из этого следует, что рабочая глубина других взаимодействующих с землей инструментов, таких как оставшиеся плужные корпуса, также может регулироваться индивидуально, независимо от расстояния до поверхности земли основной рамы 112. Кроме того, каждый из взаимодействующих с землей инструментов может быть регулируемым независимо друг от друга. Например, каждый из множества первых взаимодействующих с землей инструментов (т.е. взаимодействующих с землей инструментов на первой стороне основной рамы 112) может независимо регулироваться, чтобы иметь индивидуальные расстояния от основной рамы, которые могут отличаться от расстояния до основной рамы соседнего взаимодействующего с землей инструмента. Такое расположение особенно полезно в неровных полевых условиях. Неровная поверхность 580 земли схематично изображена, например, на фиг.10. Фиг.10 показывает пашущее орудие 500 с фиксированными плужными корпусами 522а, 524а, 526а, 528а, 530а, 532а, 534а, 536а, 538а, 522b, 524b, 526b, 528b, 530b, 532b, 534b, 536b, 538b, которые не являются подвижными относительно рамы, аналогично пашущему орудию 10 на фигурах 1А-1С. Колесо 520 орудия движется по неровной поверхности 580 земли и определяет расстояние от поверхности земли основной рамы 512.
Понятно, что по мере того, как пашущее орудие 500 перемещается по полю с неровной поверхностью 580 земли, некоторые из плужных корпусов, такие как плужные корпуса 524а, 526а, 528а, 530а и 532а по меньшей мере частично проникают в почву, тогда как другие плужные корпуса, такие как плужные корпуса 522а, 534а, 536а и 538а, возвышаются над почвой и, таким образом, не проникают в почву, вызывая неравномерную глубину плуга и в этом случае прерывистые борозды. Независимо регулируемые взаимодействующие с землей инструменты, такие как те, что описаны на фиг.2, позволяют настроить рабочую глубину в соответствии с условиями земли для достижения однородных борозд. Условия земли могут быть обнаружены датчиком на орудии и/или на сельскохозяйственном (буксирующем) транспортном средстве.
В альтернативном варианте осуществления, некоторые из взаимодействующих с землей инструментов могут быть закреплены относительно основной рамы 112, аналогично решению, показанному на фигурах 1А-1С, тогда как другие взаимодействующие с землей инструменты могут быть подвижными относительно основной рамы, например, посредством шарнирного четырехугольника, такого как показан на фиг.2.
Возвращаясь к фиг.2, привод 110 предусмотрен для перемещения шарнирного четырехугольника между первым и вторым конечными положениями. Привод 110 и шарнирный четырехугольник 114 являются частью устройства регулировки глубины, которое используется для перемещения первого взаимодействующего с землей инструмента 122а относительно основной рамы 112. Привод 110 согласно варианту осуществления на фиг.2 представляет собой гидравлический цилиндр. Камеры гидравлического цилиндра могут быть соединены с существующей гидравлической системой соответствующего буксирующего транспортного средства (не показано), которая будет подавать гидравлическую жидкость под давлением, чтобы вызвать перемещение шарнирного четырехугольника 114. Первый конец 150 привода 110 соединен с основной рамой 112. Второй конец 152 привода 110 соединен с соединительной тягой 120 шарнирного четырехугольника 114. Соответственно, в варианте осуществления на фиг.2 вторая поворотная тяга 118 будет перемещаться в направлении своего первого конечного положения, обозначенного линией L1, когда гидравлический цилиндр втягиваться. Аналогично, вторая поворотная тяга 118 будет перемещаться в противоположном направлении, в направлении ее второго конечного положения, обозначенного линией L2, когда гидравлический цилиндр выдвигается. Механические концевые упоры могут быть предусмотрены для ограничения перемещения шарнирного четырехугольника 114 и, возможно, для фиксации шарнирного четырехугольника 114 в его первом и/или втором конечном положении. Конечно, плуг также может быть использован для обработки поля, когда шарнирный четырехугольник 114 находится в промежуточном положении, между первым конечным положением и вторым конечным положением. Может быть предусмотрена защелка для фиксации четырех тяг в любом желаемом промежуточном положении между первым и вторым конечными положениями.
Ввиду вышесказанного, вытягивание привода 110 на фиг.2 приведет к выталкиванию взаимодействующего с землей инструмента 128 из земли, то есть к уменьшению рабочей глубины. Аналогичным образом, втягивание привода 110 приведет к тому, что первый взаимодействующий с землей инструмент 122а будет вжиматься дополнительно в почву, тем самым увеличивая рабочую глубину.
Фиг.2 дополнительно показывает ориентацию первого взаимодействующего с землей инструмента 122а во время вспашки. В примере, показанном на фиг.2, первый взаимодействующий с землей инструмент 122а представляет собой плужный корпус с сошником 126, который ориентирован в горизонтальном направлении, обозначенном осью B. Благодаря схеме шарнирного четырехугольника 114, эта горизонтальная ориентация не изменяется, поскольку рабочая глубина первого взаимодействующего с землей инструмента 122а отрегулирована. Другими словами, устройство регулировки глубины по фиг.2 будет действовать для поддержания ориентации первого взаимодействующего с землей инструмента 122а, поскольку соединительная тяга 120 будет сохранять свою ориентацию относительно основной рамы 112.
Другой вариант осуществления схематично представлен на фиг.3. Части варианта осуществления на фиг.3, которые имеют функциональные возможности, идентичные частям варианта осуществления, показанного на фиг.2, обозначены одинаковыми ссылочными позициями. В варианте осуществления по фиг.3, два взаимодействующих с землей инструмента, первый взаимодействующий с землей инструмент 122а и второй взаимодействующий с землей инструмент 124а из множества первых взаимодействующих с землей инструментов соединены с одной и той же соединительной тягой 120. Шарнирный четырехугольник 114 на фиг.2 был заменен шарнирным пятиугольником, который выполнен в виде двух параллелограммных систем тяг. Первая параллелограммная система тяг образована первой поворотной тягой 116, второй поворотной тягой 118, соединительной тягой 120 и основной рамой 112. Вторая параллелограммная система тяг образована третьей поворотной тягой 160, первой поворотной тягой 116, соединительной тягой 120 и основной рамой 112. Как первый, так и второй взаимодействующие с землей инструменты 122a, 124a перемещаются вместе с соединительной тягой 120 аналогично соединительной тяге 120 на фиг.2. Соответственно, регулировка глубины первого и второго взаимодействующих с землей инструментов 122а, 124а синхронизируется через соединительную тягу 120. Конечно, любое количество взаимодействующих с землей инструментов может быть присоединено к соединительной тяге 120, так что рабочая глубина нескольких или всех взаимодействующих с землей инструментов (на одной стороне основной рамы 112) может регулироваться одновременно. Приведение в действие затем может быть достигнуто одним приводом 110.
Фиг.4 показывает другой вариант осуществления настоящего изобретения, в котором по сравнению с вариантом на фиг.2, привод 110, который выполнен в виде гидравлического цилиндра, был заменен приводом 210, который представляет собой электрический двигатель. Привод 210 представляет собой электрический двигатель, который соединен между основной рамой 112 и первой осью 142 поворота второй поворотной тяги 118 шарнирного четырехугольника 114. Конечно, привод 210 (или дополнительный привод) также может быть соединен с первой осью 138 поворота первой поворотной тяги 116. Привод 210 может быть использован для поворота шарнирного четырехугольника 114 между его первым и вторым концевыми положениями или любого положения между ними для регулировки рабочей глубины первого взаимодействующего с землей инструмента 122а. Шарнирный четырехугольник 114 и привод 210 (электрический двигатель) являются частью устройства регулировки глубины для перемещения первого взаимодействующего с землей инструмента 122а относительно основной рамы 112.
Обращаясь к фиг.5, показано другое устройство регулировки глубины согласно другому варианту осуществления пашущего орудия. Устройство регулировки глубины на фиг.5 включает в себя первый привод 310 и второй привод 320. Первый взаимодействующий с землей инструмент 322а соединен с основной рамой 112 через поворотную тягу 316. Поворотная тяга имеет первую ось 318 поворота, соединяющую поворотную тягу 316 с основной рамой 112. Противоположный, второй конец поворотной тяги 316, содержит вторую ось поворота (не показана), соединяющую поворотную тягу 316 с первым взаимодействующим с землей инструментом 322а. Соответственно, взаимодействующий с землей инструмент 322а может поворачиваться вместе с поворотной тягой 316 вокруг основной рамы 112 для регулировки рабочей глубины первого взаимодействующего с землей инструмента 322a.
Для перемещения поворотной тяги 316, предусмотрен первый привод 310. Первый привод 310 имеет первую ось 314 поворота, соединенную с основной рамой 112, и вторую ось поворота (не показана), соединенную с поворотной тягой 316. Первый привод 310 представляет собой гидравлический цилиндр. Гидравлический цилиндр может поворачивать поворотную тягу 316 и первый взаимодействующий с землей инструмент 322a между первым и вторым положениями, поясненными со ссылкой на фиг.2.
Второй привод 320 предусмотрен между поворотной тягой 316 и первым взаимодействующим с землей инструментом 322а. Второй привод 320 представляет собой гидравлический цилиндр. Первый конец 322 второго привода 320 соединен с возможностью поворота с поворотной тягой 316. Противоположный, второй конец 324с возможностью поворота соединен с первым взаимодействующим с землей инструментом 322а через ось поворота. Устройство регулировки глубины на фиг.5 содержит первый привод 310, второй привод 320 и поворотную тягу 316.
Второй привод 320 может использоваться для поддержания ориентации первого взаимодействующего с землей инструмента 322а с землей во время регулировки глубины. Следует понимать, что если поворотная тяга 316 и первый взаимодействующий с землей инструмент 322а поворачиваются вместе посредством привода 310, ориентация первого взаимодействующего с землей инструмента 322а с землей может изменяться во время поворотного движения. Чтобы компенсировать такое изменение ориентации, второй привод 320 может быть выдвинут или втянут. Это будет компенсировано посредством выравнивания первого взаимодействующего с землей инструмента с требуемой ориентацией, такой как горизонтальное направление, обозначенное линией B на фиг.5.
Например, если первый привод 310 втянут для поворота поворотной тяги 316 в направлении линии L1, рабочая глубина увеличивается, и ориентация сошника 326 первого взаимодействующего с землей инструмента 322а будет изменять ориентацию (например, подъем), как обозначено линией C. Чтобы противодействовать этому изменению ориентации первого взаимодействующего с землей инструмента 322а, второй привод 320 может быть втянут. Втягивание второго привода 320 приведет к тому, что сошник 326 первого взаимодействующего с землей инструмента 322а будет опущен, чтобы сохранить его горизонтальную ориентацию по линии В.
Первый и второй приводы 310, 320 могут быть соединены с блоком управления (не показан), который может автоматически синхронизировать приведение в действие обоих приводов 310, 320 для сохранения первого взаимодействующего с землей инструмента 322а (в данном случае плужного корпуса) в своей желаемой ориентации, когда рабочая глубина регулируется.
Со ссылкой к фиг.6, показано устройство регулировки глубины согласно другому варианту осуществления настоящего изобретения. Устройство регулировки глубины на фиг.6 выполнено с возможностью перемещения взаимодействующий с землей инструмент 422a, например, плужного корпуса в поступательном направлении вдоль стрелки E. Другими словами, вместо того, чтобы поворачиваться вокруг основной рамы, как описано со ссылкой на фигуры 2-5, взаимодействующий с землей инструмент 422a на фиг.6 может быть перемещен поступательным образом на угол относительно основной рамы 112 для регулировки рабочей глубины взаимодействующего с землей инструмента 422a.
Устройство регулировки глубины содержит направляющую втулку 410 и скользящий элемент 412. Направляющая втулка 410 является неподвижной к основной раме 112. В этом конкретном варианте осуществления, направляющая втулка 410 прикреплена к одной из ножек Y-образной балки 442, которая в свою очередь прикреплена к основной раме 112. Однако следует понимать, что направляющая втулка 410 также может быть непосредственно прикреплена к основной раме 112 без необходимости отдельной балки 442.
Скользящий элемент 412 размещен внутри направляющей втулки 410. Скользящий элемент 412 является подвижным относительно направляющей втулки 410 вдоль стрелки E. Один конец скользящего элемента 412 прикреплен к взаимодействующему с землей инструменту 422a. Противоположный конец скользящего элемента является подвижным внутри направляющей втулки 410. Соответственно, если скользящий элемент 412 движется вдоль стрелки E, то же самое происходит и с взаимодействующим с землей инструментом 422a, что приводит к регулировке глубины. Понятно, что во время регулировки глубины, взаимодействующий с землей инструмент 422a сохраняет свою ориентацию параллельно линии B.
Устройство регулировки глубины дополнительно содержит привод 414, в частности гидравлический цилиндр. Привод 414 имеет первый конец 416, соединенный с направляющей втулкой 410, и противоположный второй конец (не показан), соединенный с взаимодействующим с землей инструментом 422а. Соответственно, вытягивание привода 414 будет увеличивать рабочую глубину взаимодействующего с землей инструмента 422a. Подобным образом, втягивание привода 414 будет уменьшать рабочую глубину взаимодействующего с землей инструмента 422a.
Фиг.7 показывает вариант осуществления настоящего изобретения, в котором пашущее орудие содержит датчик 502 препятствия. Устройство регулировки глубины на фиг.7 является, по существу, идентичным устройству регулировки глубины, описанному в отношении фиг.2. Соответственно, соответствующие части были обозначены одинаковыми ссылочными позициями. Датчик 502 препятствия выполнен с возможностью обнаружения любого препятствия, которое может быть на пути первого взаимодействующего с землей инструмента 122а во время использования пашущего орудия. Понятно, что аналогичные датчики препятствия также могут быть предусмотрены в любом из вариантов осуществления, показанных на фигурах 2-6. В примере на фиг.7, примером препятствия 504 может быть камень, покрытый грунтом под поверхностью 80 земли. Как только препятствие 504 обнаружено датчиком 502 препятствия, сигнал обратной связи отправляется в блок 506 управления, который может быть подключен к гидравлической системе 508 для активации привода 110.
В частности, если препятствие 504 обнаружено перед первым взаимодействующим с землей инструментом 122a, блок 506 управления может отправлять сигнал в гидравлическую систему 508 для выдвижения привода 110, тем самым поднимая первый взаимодействующий с землей инструмент 122а из почвы в направление стрелки D, чтобы избежать столкновения взаимодействующего с землей инструмента 122а с препятствием 504. В этом варианте осуществления, первый взаимодействующий с землей инструмент 122а будет поворачиваться вверх и от препятствия 504 при выдвижении привода 110.
Датчик 502 препятствия расположен перед первым взаимодействующим с землей инструментом в рабочем направлении пашущего орудия. Один датчик 502 препятствия может использоваться для сканирования всей ширины всего пашущего орудия, так что блок 506 управления может быть способным активно поднимать каждый из взаимодействующих с землей инструментов, на которые может воздействовать конкретное препятствие. С этой целью, блок 506 управления может иметь базу данных, включающую в себя информацию о положении каждого из взаимодействующих с землей инструментов относительно датчика 502 препятствия.
Датчик 502 препятствия в варианте осуществления по фиг.7 является бесконтактным датчиком, который может обнаруживать препятствия посредством излучения. В качестве альтернативы, конечно, можно использовать контактные датчики, которые проникают в почву и обнаруживают препятствия, такие как камни, размера, который может вызвать повреждение взаимодействующих с землей инструментов.
В другом, не представленном варианте устройства прохождения камней, показанном на фиг.7, детектор препятствий может не потребоваться. Скорее, препятствия могут быть обнаружены при столкновении взаимодействующих с землей инструментов с препятствиями. Такое воздействие создаст повышение давления в приводе 110, показанном на фиг.7, которое может быть измерено в гидравлической системе 508 и возвращено обратно в блок 506 управления. Блок 506 управления может использовать этот сигнал, чтобы либо активно извлечь взаимодействующий с землей инструмент из земли посредством привода 110, либо уменьшать гидравлическое сопротивление гидравлической системы 508, чтобы привод 110 мог легче втягиваться из-за реактивной силы, создаваемой ударом между взаимодействующим с землей инструментом и препятствием.
Ввиду вышесказанного, пашущее орудие согласно настоящему раскрытию может быть способно, уменьшать рабочую глубину взаимодействующего с землей инструмента из одного или нескольких взаимодействующих с землей инструментов, чтобы заблаговременно или пассивно избегать столкновения с препятствиями или предотвращать повреждение во время столкновения.
Способ 300 регулировки рабочей глубины в соответствии с вариантом осуществления прохождения камня, показанном на фиг.7, описан на фиг.8. Фиг.8 показывает блок-схему способа прогнозирования или реагирования на препятствия, такие как камни. На первом этапе S302 обнаруживается наличие препятствия. Этот этап может включать в себя этапы обнаружения препятствий в почве и определения того, будет ли упомянутое препятствие на рабочем пути любого из взаимодействующих с землей инструментов пашущего орудия. С этой целью, блок управления может иметь доступ к базе данных, предоставляющей блоку управления информацию о положении каждого из взаимодействующих с землей инструментов относительно конкретного препятствия. В качестве альтернативы, обнаружение препятствия также может быть достигнуто путем измерения воздействия соответствующих взаимодействующих с землей инструментов на препятствие, и в этом случае блок управления знает, какой из взаимодействующих с землей инструментов затронут. Как только положение препятствия и соответствующих взаимодействующих с землей инструментов определено, рабочая глубина затронутых взаимодействующих с землей инструментов уменьшается на втором этапе S304. Другими словами, взаимодействующие с землей инструменты, которые собираются столкнуться с препятствием или уже столкнулись с препятствием, могут быть извлечены из почвы, чтобы избежать повреждения/дополнительного повреждения взаимодействующих с землей инструментов.
При возможном этапе S306, датчик препятствия может использоваться для обнаружения того, было ли препятствие пройдено или нет. Если препятствие еще не преодолено, датчик может ожидать в течение заданного промежутка времени, пока не будет проведено дополнительное измерение. Если препятствие было преодолено, рабочая глубина соответствующих взаимодействующих с землей инструментов может еще раз быть увеличена до того уровня, когда препятствие было обнаружено, на следующем этапе S310. Следует понимать, что вместо этапов S306 и S308, блок управления может быть настроен на ожидание в течение заданного периода времени перед тем, как снова опустить взаимодействующие с землей инструменты (т.е. увеличить рабочую глубину). Это заранее определенное время может быть основано на предыдущем опыте оператора или может быть установлено после того, как размер препятствия обнаружен датчиком препятствия, позволяющим блоку управления рассчитать время, необходимое для преодоления упомянутого препятствия.
Хотя подробное описание относится к плужным корпусам и предплужникам, следует понимать, что настоящее изобретение не ограничено такими взаимодействующими с землей инструментами. Скорее, любая форма взаимодействующего с землей инструмента пашущего орудия может использоваться в связи с устройством регулировки глубины, описанным выше. Аналогично, количество и расположение взаимодействующих с землей инструментов, показанных на чертежах, не следует понимать как ограничивающие объем этого изобретения.
Перечисление или обсуждение явно ранее опубликованного документа в этой спецификации не обязательно должно восприниматься как подтверждение того, что документ является частью уровня техники или является общеизвестным.
Предпочтения и варианты для данного аспекта, признака или параметра изобретения, если в контексте не указано иное, должны рассматриваться как раскрытые в комбинации с любыми и всеми предпочтениями и вариантами для всех других аспектов, признаков и параметров изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ ГЛУБИНЫ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2020 |
|
RU2735246C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПАШУЩАЯ СИСТЕМА, СПОСОБ ЕЁ РАБОТЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2020 |
|
RU2742473C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2020 |
|
RU2738484C1 |
| Сельскохозяйственное орудие | 2020 |
|
RU2748066C1 |
| Плуг | 2020 |
|
RU2742830C1 |
| ПЛУГ, СПОСОБ РАБОТЫ ПЛУГА, РЕАЛИЗУЕМЫЙ С ПОМОЩЬЮ КОМПЬЮТЕРА, И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА. | 2020 |
|
RU2739366C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ОРУДИЕ | 2020 |
|
RU2742914C1 |
| КРЕПЕЖНЫЙ УЗЕЛ ДЛЯ ПРЕДПЛУЖНИКОВ ПЛУГА | 2020 |
|
RU2748067C1 |
| ПЛУГ С УСТРОЙСТВОМ ДЛЯ ПОДЪЕМА, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ГРЯДИЛЯ | 2011 |
|
RU2566183C2 |
| КОМБИНАЦИЯ ИЗ ПОЛУНАВЕСНОГО ОБОРОТНОГО ПЛУГА И УСТРОЙСТВА ДЛЯ ПРЕДПОСЕВНОЙ ПОДГОТОВКИ ПОЧВЫ | 1993 |
|
RU2096938C1 |






Группа изобретений относится к сельскому хозяйству. Сельскохозяйственная машина содержит сельскохозяйственное транспортное средство и пашущее орудие, соединенное с передней или задней частью сельскохозяйственного транспортного средства. Пашущее орудие содержит основную раму, поддерживающую множество первых взаимодействующих с землей инструментов. Пашущее орудие содержит устройство регулировки глубины для перемещения по меньшей мере первого взаимодействующего с землей инструмента из множества первых взаимодействующих с землей инструментов относительно основной рамы для обеспечения регулировки рабочей глубины первого взаимодействующего с землей инструмента. Первый взаимодействующий с землей инструмент из множества первых взаимодействующих с землей инструментов прикреплен к основной раме в заданной ориентации относительно поверхности земли. Устройство регулировки глубины выполнено с возможностью перемещения первого взаимодействующего с землей инструмента относительно основной рамы так, что сохраняется заданная ориентация первого взаимодействующего с землей инструмента. Обеспечивается улучшение регулировки глубины пашущих орудий. 2 н. и 12 з.п. ф-лы, 12 ил.
1. Пашущее орудие, содержащее основную раму (112), поддерживающую множество первых взаимодействующих с землей инструментов, при этом пашущее орудие содержит устройство регулировки глубины для перемещения по меньшей мере первого взаимодействующего с землей инструмента (122а) из множества первых взаимодействующих с землей инструментов относительно основной рамы (112) для обеспечения регулировки рабочей глубины первого взаимодействующего с землей инструмента (122а), причем первый взаимодействующий с землей инструмент (122а) из множества первых взаимодействующих с землей инструментов прикреплен к основной раме (112) в заданной ориентации относительно поверхности (80) земли, при этом устройство регулировки глубины выполнено с возможностью перемещения первого взаимодействующего с землей инструмента (122а) относительно основной рамы (112) так, что сохраняется заданная ориентация первого взаимодействующего с землей инструмента (122а).
2. Пашущее орудие по п. 1, в котором устройство регулировки глубины содержит шарнирный четырехугольник (114), в частности параллелограммную рычажную передачу, соединяющую основную раму (112) с первым взаимодействующим с землей инструментом (122а).
3. Пашущее орудие по п. 1 или 2, в котором устройство регулировки глубины содержит привод (110, 210, 310, 320), в частности гидравлический привод, для приведения в действие устройства регулировки глубины.
4. Пашущее орудие по любому из пп. 1-3, в котором устройство регулировки глубины содержит два привода (310, 320), в частности два гидравлических цилиндра, первый привод (310) для регулировки рабочей глубины первого взаимодействующего с землей инструмента (122а), и второй привод (320) для регулировки ориентации первого взаимодействующего с землей инструмента (122а).
5. Пашущее орудие по любому из пп. 1-4, которое содержит блок (406) управления для управления устройством регулировки глубины, причем блок управления выполнен с возможностью уменьшения рабочей глубины первого взаимодействующего с землей инструмента (122а) из множества первых взаимодействующих с землей инструментов, если столкновение с препятствием встречается и/или является предсказуемым.
6. Пашущее орудие по п. 5, которое содержит датчик (402) препятствия для идентификации препятствий (404) в почве, причем датчик (402) препятствия расположен перед первым взаимодействующим с землей инструментом (122а) в направлении движения.
7. Пашущее орудие по любому из пп. 1-6, в котором устройство регулировки глубины выполнено с возможностью перемещения первого и второго взаимодействующих с землей инструментов (122а, 124а) из множества первых взаимодействующих с землей инструментов относительно основной рамы (112), так что перемещение первого и второго взаимодействующих с землей инструментов является синхронизированным.
8. Пашущее орудие по любому из пп. 1-7, которое содержит по меньшей мере два устройства регулировки глубины для перемещения первого и второго взаимодействующих с землей инструментов из множества первых взаимодействующих с землей инструментов относительно основной рамы (112), и при этом два устройства для регулировки глубины выполнены с возможностью перемещения первого и второго взаимодействующих с землей инструментов независимо друг от друга.
9. Пашущее орудие по любому из пп. 1-8, в котором основная рама (112) поддерживает множество вторых взаимодействующих с землей инструментов и выполнена с возможностью перевода между первой конфигурацией, в которой множество первых взаимодействующих с землей инструментов находится в рабочем положении, и второй конфигурацией, в которой множество вторых взаимодействующих с землей инструментов находится в рабочем положении, при этом пашущее орудие содержит устройство регулировки глубины для перемещения первого взаимодействующего с землей инструмента из множества вторых взаимодействующих с землей инструментов относительно основной рамы для обеспечения регулировки рабочей глубины первого взаимодействующего с землей инструмента.
10. Пашущее орудие по п. 9, в котором первый взаимодействующий с землей инструмент (122а) из множества первых взаимодействующих с землей инструментов выполнен с возможностью перемещения независимо от первого взаимодействующего с землей инструмента из второго множества взаимодействующих с землей инструментов.
11. Пашущее орудие по любому из пп. 1-10, в котором механизм регулировки глубины выполнен с возможностью перемещения первого взаимодействующего с землей инструмента (122а) между первым положением, в котором установлена минимальная рабочая глубина, и вторым положением, в котором установлена максимальная рабочая глубина, при этом пашущее орудие содержит первый упор для блокировки первого взаимодействующего с землей инструмента (122а) в его первом положении, и/или пашущее орудие содержит второй упор для блокировки первого взаимодействующего с землей инструмента (122а) в его втором положении.
12. Пашущее орудие по любому из пп. 1-11, в котором по меньшей мере один взаимодействующий с землей инструмент (122а) представляет собой плужный корпус.
13. Пашущее орудие по любому из пп. 1-12, которое представляет собой оборотный плуг.
14. Сельскохозяйственная машина, содержащая сельскохозяйственное транспортное средство и пашущее орудие по любому из пп. 1-13, при этом пашущее орудие соединено с передней или задней частью сельскохозяйственного транспортного средства.
| DE 3722687 A1, 28.04.1988 | |||
| US 3481407 A, 02.12.1969 | |||
| DE 102015111518 A1, 19.01.2017 | |||
| US 10015923 B2, 10.07.2018. |

